Embed Size (px)
Citation preview

International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 8
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
An Automated Approach Based On Bee Swarm in
Tackling University Examination Timetabling
Problem
Fong Cheng Weng, Hishammuddin bin Asmuni*
Software Engineering Research Group, Software Engineering Department, Universiti Teknologi Malaysia, 81310 UTM Skudai,
Johor, Malaysia *
Corresponding author.
E-mail address: [email protected] (CW. Fong), [email protected] (H. Asmuni)
Abstract-- A recently invented foraging behavior optimization
algorithm which is the Artificial Bee Colony (ABC) algorithm
has been widely implemented in addressing various types of optimization problems such as job shop scheduling, constraint
optimization problems, complex numerical optimization
problems, and mathematical function problems. However, the
high exploration ability of conventional ABC has caused a
slowdown in its convergence speed. Inspired from the Particle Swarm Optimization (PSO) method, an automated approach has
been proposed in this study and is named as the Global Best
Concept - Artificial Bee Colony (GBABC) algorithm. The
algorithm is formulated using the global best concept, which is
then implemented into the employed bee phase to incorporate the global best solution information into solutions. This is for the
sake of leading the search process towards exploring other
potential search regions to locate the best global solution. In
addition, to improve its exploitation ability, a local search
method has been incorporated into the onlooker bee phase. With the use of the global best concept and local search method, the
convergence speed, exploration and exploitation abilities of the
basic ABC have been significantly enhanced. Experiments are
carried out on standard university examination benchmark
problems (Carter’s un-capacitated dataset). Results obtained demonstrate that, generally, the GBABC had outperformed the
basic ABC algorithm in almost all instances and its performance
is also comparable to other published literature. Index Term-- University examination timetabling, Artificial bee
colony algorithm, Hill climbing.
1. INTRODUCTION
Various type of timetabling problems have been
addressed by using optimization methods such as job shop
scheduling [1-4], flow shop scheduling [5-7], software project
scheduling [8], open shop scheduling [9], machine scheduling
[10-14], and transportation scheduling [15]. In this paper, the
timetabling of un iversity examination is the focus of the study
and an overview of related studies can be seen at [16-18].
University examination t imetabling is a process of
assigning a number o f exams into a set of permitted time slots
without sacrificing its feasibility; a feasib le timetable is one
that is clash free. Generally, two distinct types of constraints
are encountered in generating a t imetable – the hard
constraints and soft constraints. Hard constraints must be
satisfied under any circumstance in order to preserve the
feasibility of the timetable while fulfillment of soft constraints
is optional, but its vio lation should be minimized. Th is is
because a timetable generated is assessed based on its ability
to fulfill both hard and soft constraints.
Approaches in rectify ing university examination
timetabling problems vary over a wide rage. From the survey
papers [16-18], heuristic approaches that have been applied in
solving timetabling problems are mostly based on graph
coloring heuristics [16, 19-20]. In recent years, application of
meta-heuristic and hybridization approaches have become the
main focus and examples of such approaches include the Tabu
search [21-25], Simulated Annealing [26-28], Honey Bee
Mating optimizat ion [29], Genetic algorithm [30-31], and
Great Deluge algorithm [32-36]. Related publications on
university timetabling problems can be found in [16-18, 37-
39]. Th is study, on the other hand, addressed this problem
using the Artificial Bee Colony (ABC) algorithm.
It is well known that population-based methods like
the ABC algorithm must possess adequate exploration and
exploitation ab ilit ies [40]. The exp loration ability allows the
bee colony to search and identify possible unknown regions in
the search space, whereas the explo itation ability permits the
formulat ion of better solutions based on the information of
previous solutions. Ironically, instead of complementing each
other, these two abilities are actually in contradiction.
Therefore, this study has been conducted to balance these two
abilities.
The proposed Global Best Concept - Art ificial Bee
Colony (GBABC) algorithm in th is study had been anticipated
to improve the convergence speed by enhancing both
exploration and exp loitation ab ilities simultaneously with the
implementation of the global best concept, which were
inspired from the Particle Swarm Optimization (PSO) method
and Local Search method. The effect iveness of the proposed
algorithm was tested against a set of benchmark datasets - the
Carter incapacitated benchmark datasets. Comparison was
then made with current state-of-the-art algorithm. In a nutshell,
experimental results illustrated that GBABC can generate high
quality solutions as compared to basic ABC and the results are
also comparable with best reported results.
The rest of the paper is organized as follows. Firstly,
description on examination timetabling problem is presented

International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 9
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
in Sect ion 2. Section 3 gives an overview on the basic ABC
algorithm. The proposed method and experimental results are
presented in Sect ion 4 and Sect ion 5 respectively. Lastly, a
brief conclusion regarding this study is presented in Section 6.
2. PROBLEM DESCRIPTION
2.1 Examination timetabling problem
In this research work, Carter’s un-capacitated
examination benchmark datasets (introduced by Carter et al.
[19]) is used to examine the performance of the proposed
approach. This benchmark datasets have been widely used in
last decade (see [19, 24, 32-33, 36, 41-48]). Most examination
timetabling prob lems are associated to three attributes [32], i.e:
a number of exams;
a number of predefined time slots; and
a set of student exam enrollments that clearly
describe the conflicting exams.
[18-19, 49] stated that examination timetabling can
be defined as the action of assigning a number of exams into
given set of permitted time slots and the timetable itself must
be able to satisfy a number of constraints (hard and soft) at the
same time. From the survey papers [49], the constraints are
vary widely across different institutions. In addition, the
degree of variation of constraints has also increased due to the
raise of the number of students and the degree of
modularization of courses in university [49].
Regardless of the quality o f the timetable, a feasible
timetable must satisfy all hard constraints given. A common
hard constraint is to make sure that no student has to attend
two or more exams at the same t ime, i.e. , there are no clashes.
Another example of hard constraint is to ensure the
sufficiency of resources (rooms and seats capacity) at any
timeslot. On the other hand, soft constraint refers to a set of
extra demands on a timetable. For instance, having a large
time gap between two exams will give the students ample time
to do revision. Furthermore, it is also desirable to have an
exam with large number of participants scheduled at a time
earlier than other examinations to allow sufficient time for
marking the answer sheets. It should be emphasized here that
it is not possible to satisfy all soft constraints, but its violation
should be kept as low as possible [50].
For Carter’s un-capacitated examination benchmark
datasets, the room capacity constraint is not considered during
the timetable construction and only one hard constraint is
considered which is to produce a clash free timetable. The
level of hard constraint satisfaction can be evaluated based on
Eq. (1) and the required inputs for examination t imetabling are
as shown below (refer to [18-19]):
N, number of exams;
M, number of students;
P, a predefined timeslots;
Conflict matrix, c=(cij) N×N where each element in the
symmetrical matrix is the number of students that
will sit for both exams i and j, where i, j 1,…,N}.
ti is the timeslots within a set of predefine timeslots
(1 ≤ ti ≤ P) and contains the scheduled exam i (j
1,…,N}
(1)
The soft constraint considered in Carter’s un-
capacitated examination benchmark datasets is to spread the
conflicting exams as evenly as possible so that the students
have much time for rev ision process. The quality of a
timetable is assessed based on the degree of satisfaction of soft
constraints. In order to measure the quality of a timetable, a
fitness function or proximity cost function (Eq. 2) (see [16,
18]) is indispensable. Eq. (2) is used to calculate penalty for
two consecutive exams enro lled by a student. The penalty
value assigned is based on the time gap(s) between two
conflicting exams, where prox(ti, tj)=16, 8, 4, 2, 1 if the time
gaps are 0, 1, 2, 3, and 4 respectively.
(2)
Thus, the objective of university examination
timetabling (Carter’s un-capacitated datasets) is to satisfy the
hard constraint and min imize the violation of soft constraints ,
which is tantamount to minimizing the value of (Eq. 2).
2.2 Scope and limitation of the research work
In this paper focuses on examination
timetabling problem (Carter’s un-capacitated examination
benchmark dataset [19]) is take into account. University
timetabling problem can be divided into two types: university
course and examination t imetabling. Both of these timetabling
problems are similar in some way, but there are significant

International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 10
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
differences between them. In course timetabling problem, the
course can only scheduled into one room at one time slot. In
contrast, mult iple exams can be allocated into same room at
one time slot as long as there is enough accommodation and
no conflict exists between the exams [51]. In Carter’s
benchmark dataset, there is only one hard and soft constraint
is considered. Hard constraint refers to generate a clash free
timetable, while soft constraint refers to spread the exams
evenly so that students can have more time for revision
process. Note that the room capacity constraint is overlook in
this dataset.
3. OVERVIEW OF ARTIFICIAL BEE COLONY (ABC)
ALGORITHM
The ABC algorithm was introduced by Karaboga [52]
and mimics the foraging behavior of real honey bees. Due to
its excellent ability, large number of researches has done
studies on its application in addressing optimizat ion problems
in recent years. A survey paper on application of bee swarm
optimization (ABC algorithm, Bee Colony algorithm, Bee
Swarm Optimizat ion, and Honey Bee Mating Optimization)
can be seen in [53] and the authors also reported that 54% of
currently published publications are related to the ABC
algorithm.
In a swarm based algorithm, there are a number of
agents that work co llaboratively in solving the problems. Each
of the bees (employed bee, onlooker and scout) in ABC
algorithm represents an agent which communicates and
cooperates among themselves to find a food source (solution)
with good quality of nectar (cost or fitness value for a problem
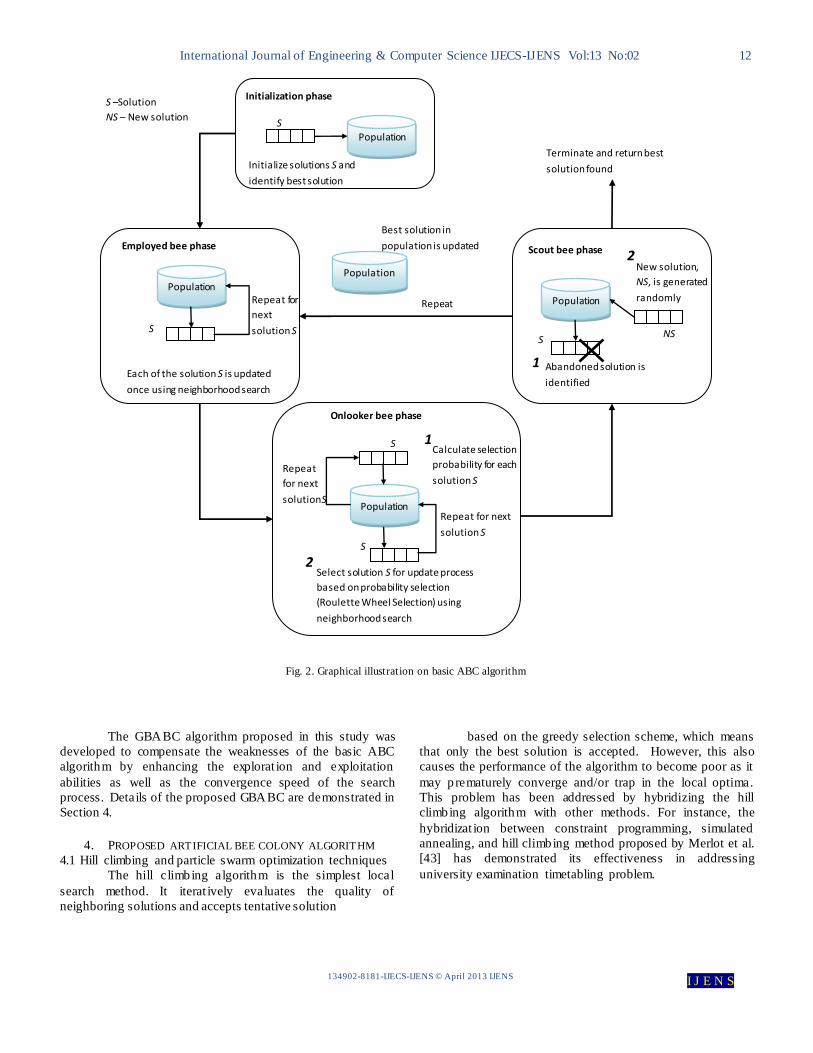
in hand). Fig. 1 (graphical illustration as presented in Fig. 2)
is an example of a general framework of the ABC algorithm
(adopted from Karaboga [52]). The figure shows that, during
the first stage, a number of food sources are initialized with
respect to the number of employed bee. At the employed bee
phase, the employed bees will t ry to exp lore new food sources
based on their memories and old food sources will be replaced
by new explored food sources only if the new food sources
have equal or better quality nectars. Communication between
the employed and onlooker bees occur when they are trying to
advertise promising food sources region to onlooker bees in
the hive. Cooperation occurs when a number of onlooker bees
in the onlooker bee phase explore regions of food sources
advertised by the employed bees.
If the quality of a food source cannot be improved in
a predefined iterations (defined in a parameter called limit),
the employed bee will turn into a scout bee in order to exp lore
new food source. The newly d iscovered food source will then
be memorized and the old food source is abandoned. Thus,
artificial bees in ABC algorithm are able to globally exp lore
the problem search reg ion (done by scout bees) and locally
explore the search region (done by employed and onlooker
bees) so that the exploration and explo itation abilities are
maintained. It should be noted that both employed and
onlooker bees generate new food sources by performing
neighborhood search and accept new food sources using the
greedy selection scheme where they accept only food sources
with better nectar. In addition, all solutions are improved
during the employed bee phase while only selected food
sources are improved during the onlooker bee phase (based on
probability selection scheme – the Roulette Wheel Selection).
The attractive strengths of ABC algorithm have
sparked the interest of many researchers to study and apply it
to solve real optimization problems. These include problems
in flow shop scheduling [5] and university examination
timetabling [54-55]. Nevertheless, certain aspects of this ABC
are still insufficient to execute strong explorat ion during the
scout bee phase. Its explo itation ability during the employed
and onlooker bee phases are also considerably weak and thus
have led to slow convergence power. The weaknesses of the
basic ABC algorithm together with their reasons and induced
outcomes are as explained in Table I.

International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 11
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
Fig. 1. General framework of the ABC algorithm
1. Initialization:
2. Set the population size;
3. //population size = Number of EmployedBee = Number of OnlookerBee;
4. Initialize the population;
5. Calculate fitness value for each solution, f(sol);
6. Identify global best solution, solBS;
7. Set number of iterations, NumIteration;
8. Set value for parameter limit, limit;
9. Set itrCounter, limitCounter for each solution (sol) ← 0;
10.
11. Improvement:
12. While (itrCounter ≤ NumIteration) 13. //Employed bee phase
14. For i = 1 to EmployedBee do
15. Select solution soli and generate new solution soli’ by performing
16. neighborhood search;
17. If f(soli’) ≤ f(soli)
18. soli ← soli’;
19. End if
20. End for i
21.
22. //Onlooker bee phase
23. For j = 1 to OnlookerBee do
24. Calculate selection probability P, for each solution (pj to pOnlookerBee)
25. using Roulette Wheel Selection scheme;
26. sol* ← select solution based on the probability P;
27. Generate new solution sol*’ from sol* by performing neighborhood
28. search;
29. If f(sol*’) ≤ f(sol*)
30. sol* ← sol*’;
31. else
32. limitCounter++;
33. End if
34.
35. If f(solBS) ≤ f(sol*’) //update global best solution
36. solBS ← sol*’;
37. End if
38. End for j
39. 40. //Scout bee phase
41. For s = 1 to EmployedBee do
42. If (limitCounter for sols ≥ limit)
43. sols is abandoned and new solution solnew, is generated randomly;
44. Set limit counter for new solution solnew to 0, limitCounter ← 0;
45. sols ← solnew;
46. End for s
47.
45. itrCounter++;
46. End While
International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 12
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
Fig. 2. Graphical illustration on basic ABC algorithm
The GBABC algorithm proposed in this study was
developed to compensate the weaknesses of the basic ABC
algorithm by enhancing the explorat ion and exploitation
abilities as well as the convergence speed of the search
process. Details of the proposed GBABC are demonstrated in
Section 4.
4. PROPOSED ARTIFICIAL BEE COLONY ALGORITHM
4.1 Hill climbing and particle swarm optimization techniques
The hill climbing algorithm is the simplest local
search method. It iterat ively evaluates the quality of
neighboring solutions and accepts tentative solution
based on the greedy selection scheme, which means
that only the best solution is accepted. However, this also
causes the performance of the algorithm to become poor as it
may prematurely converge and/or trap in the local optima.
This problem has been addressed by hybridizing the hill
climbing algorithm with other methods. For instance, the
hybridizat ion between constraint programming, simulated
annealing, and hill climbing method proposed by Merlot et al.
[43] has demonstrated its effectiveness in addressing
university examination timetabling problem.
Terminate and return best
solution found
Repeat
Population
Best solution in
population is updated
Population
Each of the solution S is updated
once using neighborhood search
Employed bee phase
Repeat for
next
solution S S
Population
Initialize solutions S and
identify best solution
Initialization phase
S
S –Solution
NS – New solution
Population
Abandoned solution is
identified
New
New solution,
NS, is generated
randomly
New
Scout bee phase
NS
1
2
S
Onlooker bee phase
Population Repeat for next
solution S
S
S
Repeat
for next
solution S
2 Select solution S for update process
based on probability selection
(Roulette Wheel Selection) using
neighborhood search
Calculate selection
probability for each
solution S
1
International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 13
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
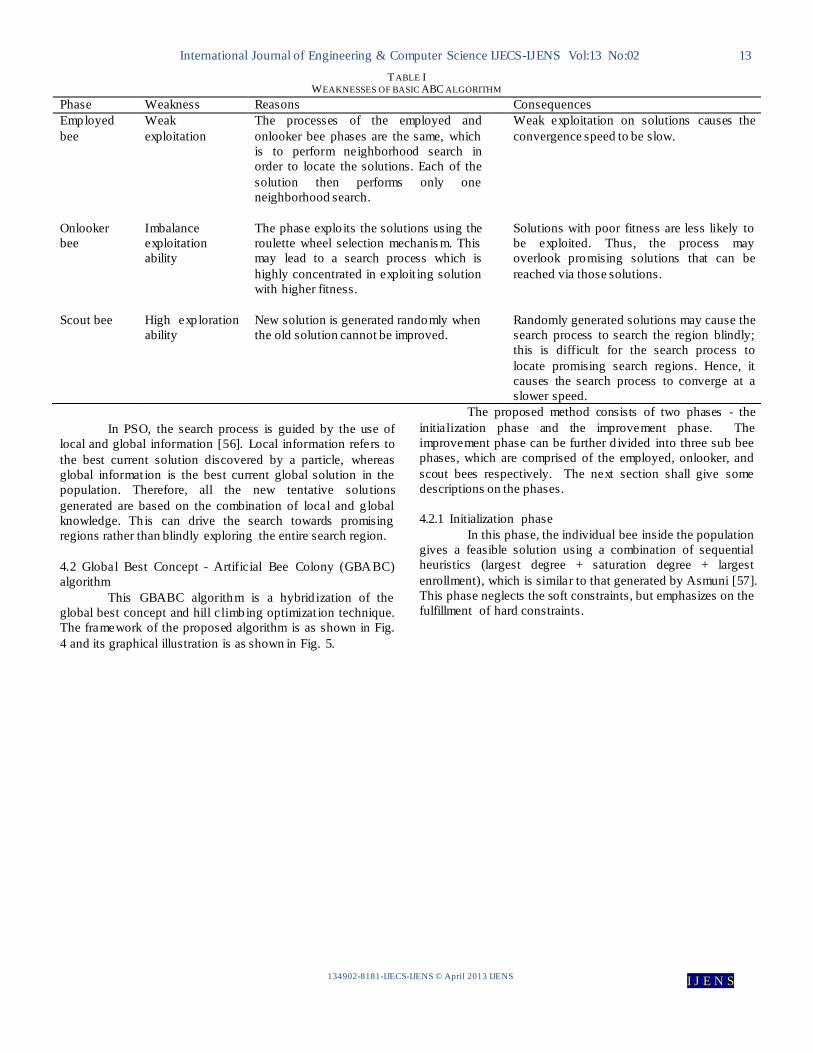
T ABLE I WEAKNESSES OF BASIC ABC ALGORITHM
Phase Weakness Reasons Consequences
Employed
bee
Weak
exploitation
The processes of the employed and
onlooker bee phases are the same, which
is to perform neighborhood search in
order to locate the solutions. Each of the
solution then performs only one
neighborhood search.
Weak exploitation on solutions causes the
convergence speed to be slow.
Onlooker
bee
Imbalance
exploitation
ability
The phase explo its the solutions using the
roulette wheel selection mechanis m. This
may lead to a search process which is
highly concentrated in exploit ing solution
with higher fitness.
Solutions with poor fitness are less likely to
be exploited. Thus, the process may
overlook promising solutions that can be
reached via those solutions.
Scout bee High exp loration
ability
New solution is generated randomly when
the old solution cannot be improved.
Randomly generated solutions may cause the
search process to search the region blindly;
this is difficult for the search process to
locate promising search regions. Hence, it
causes the search process to converge at a
slower speed.
In PSO, the search process is guided by the use of
local and global information [56]. Local information refers to
the best current solution discovered by a particle, whereas
global informat ion is the best current global solution in the
population. Therefore, all the new tentative solutions
generated are based on the combination of local and g lobal
knowledge. Th is can drive the search towards promising
regions rather than blindly exploring the entire search region.
4.2 Global Best Concept - Artificial Bee Colony (GBABC)
algorithm
This GBABC algorithm is a hybrid ization of the
global best concept and hill climbing optimizat ion technique.
The framework of the proposed algorithm is as shown in Fig.
4 and its graphical illustration is as shown in Fig. 5.
The proposed method consists of two phases - the
initialization phase and the improvement phase. The
improvement phase can be further d ivided into three sub bee
phases, which are comprised of the employed, onlooker, and
scout bees respectively. The next section shall give some
descriptions on the phases.
4.2.1 Initialization phase
In this phase, the individual bee inside the population
gives a feasible solution using a combination of sequential
heuristics (largest degree + saturation degree + largest
enrollment), which is similar to that generated by Asmuni [57].
This phase neglects the soft constraints, but emphasizes on the
fulfillment of hard constraints.
International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 14
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
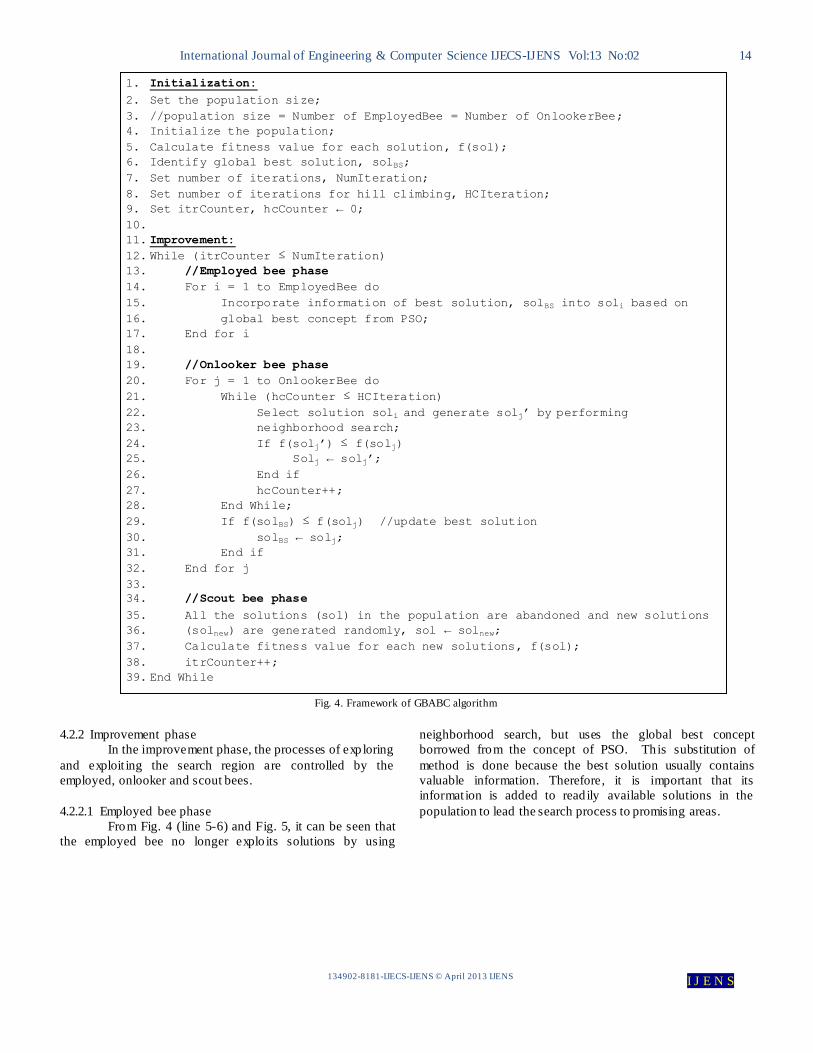
Fig. 4. Framework of GBABC algorithm
4.2.2 Improvement phase
In the improvement phase, the processes of exp loring
and exploit ing the search region are controlled by the
employed, onlooker and scout bees.
4.2.2.1 Employed bee phase
From Fig. 4 (line 5-6) and Fig. 5, it can be seen that
the employed bee no longer explo its solutions by using
neighborhood search, but uses the global best concept
borrowed from the concept of PSO. Th is substitution of
method is done because the best solution usually contains
valuable information. Therefore, it is important that its
informat ion is added to read ily available solutions in the
population to lead the search process to promising areas.
1. Initialization:
2. Set the population size;
3. //population size = Number of EmployedBee = Number of OnlookerBee;
4. Initialize the population;
5. Calculate fitness value for each solution, f(sol);
6. Identify global best solution, solBS;
7. Set number of iterations, NumIteration;
8. Set number of iterations for hill climbing, HCIteration;
9. Set itrCounter, hcCounter ← 0;
10.
11. Improvement:
12. While (itrCounter ≤ NumIteration)
13. //Employed bee phase
14. For i = 1 to EmployedBee do
15. Incorporate information of best solution, solBS into soli based on
16. global best concept from PSO;
17. End for i
18.
19. //Onlooker bee phase
20. For j = 1 to OnlookerBee do
21. While (hcCounter ≤ HCIteration)
22. Select solution soli and generate solj’ by performing
23. neighborhood search;
24. If f(solj’) ≤ f(solj)
25. Solj ← solj’;
26. End if
27. hcCounter++;
28. End While;
29. If f(solBS) ≤ f(solj) //update best solution
30. solBS ← solj;
31. End if
32. End for j
33. 34. //Scout bee phase
35. All the solutions (sol) in the population are abandoned and new solutions
36. (solnew) are generated randomly, sol ← solnew;
37. Calculate fitness value for each new solutions, f(sol);
38. itrCounter++;
39. End While
International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 15
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
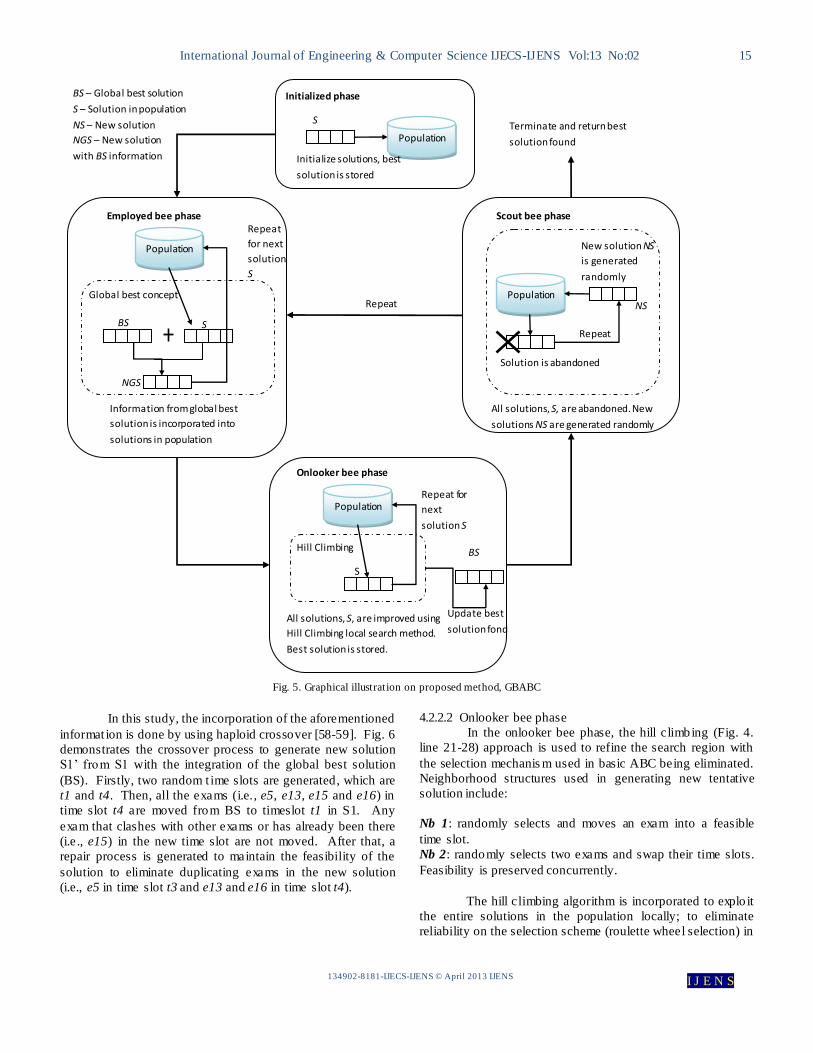
Fig. 5. Graphical illustration on proposed method, GBABC
In this study, the incorporation of the aforementioned
informat ion is done by using haploid crossover [58-59]. Fig. 6
demonstrates the crossover process to generate new solution
S1’ from S1 with the integration of the global best solution
(BS). Firstly, two random t ime slots are generated, which are
t1 and t4. Then, all the exams (i.e., e5, e13, e15 and e16) in
time slot t4 are moved from BS to timeslot t1 in S1. Any
exam that clashes with other exams or has already been there
(i.e ., e15) in the new time slot are not moved. After that, a
repair process is generated to maintain the feasibility of the
solution to eliminate duplicating exams in the new solution
(i.e., e5 in time slot t3 and e13 and e16 in time slot t4).
4.2.2.2 Onlooker bee phase
In the onlooker bee phase, the hill climbing (Fig. 4.
line 21-28) approach is used to refine the search region with
the selection mechanis m used in basic ABC being eliminated.
Neighborhood structures used in generating new tentative
solution include:
Nb 1: randomly selects and moves an exam into a feasible
time slot.
Nb 2: randomly selects two exams and swap their time slots.
Feasibility is preserved concurrently.
The hill climbing algorithm is incorporated to explo it
the entire solutions in the population locally; to eliminate
reliability on the selection scheme (roulette wheel selection) in
BS – Global best solution
S – Solution in population
NS – New solution
NGS – New solution
with BS information
Terminate and return best
solution found
Repeat
Population
Initialize solutions, best
solution is stored
Initialized phase
S
Population
Solution is abandoned
New
New solution NS
is generated
randomly
New
Scout bee phase
Repeat
All solutions, S, are abandoned. New
solutions NS are generated randomly
NS
Population
Information from global best
solution is incorporated into
solutions in population
Employed bee phase
BS S
NGS
Global best concept
Repeat
for next
solution
S
Onlooker bee phase
Population
All solutions, S, are improved using
Hill Climbing local search method.
Best solution is stored.
Hill Climbing
S
BS
Repeat for
next
solution S
Update best
solution fond

International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 16
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
basic ABC to focus more on exp loit ing fittest solution; and to
improve the convergence speed of the search process.
4.2.2.3 Scout bee phase
In this last phase, all the enhanced solutions are
abandoned and new set of solutions are randomly generated
for the next iteration (line 35-37 in Fig. 4). The purpose of re -
generating a new set of solutions is to lead the search away
from local optima (local search within the onlooker bee phase).
Since the new solutions are placed on individual iterations,
therefore we eliminated the use of the parameter, limit, in the
basic ABC algorithm. Execution of the algorithm is repeated
until the stopping criteria is met, that is when it reaches the
3000th
iteration.
Even though ABC has been applied in addressing
university timetabling problem by Alzaqebah and Abdullah
[54-55], its results remain misleading in some cases due to the
inefficiency of the algorithm itself, as reported in [55]. Two
problems induced from the selection mechanism used in ABC
algorithm reported in [54] are: “(i) A “super-individual” being
too often selected the whole population tends to converge
towards his position. The diversity of the population is then to
reduce to allow the algorithm to progress; (ii) with the
progression of algorithm, the differences between fitness are
reduced. The best one then get quite the same selection
probability as the others and the algorithm stops progressing.”
These two problems are then further investigated in this study
in order to verify the existence of them in ABC algorithm (see
Section 5.1).
As compared with previous studies that applied ABC
algorithm in related domain [54-55], our p roposed approach
differs greatly in terms of explorat ion and exploitation
processes. The differences between previous application of
ABC and the GBABC proposed in this study are as listed in
Table II.
Fig. 6. Incorporation of global best concept using haploid crossover
T ABLE II COMPARISON BETWEEN SA-ABC AND GBABC
Features SA-ABC [54] GBABC (the
proposed method)
Initial population Saturation degree Largest degree +
Saturation degree
+ Largest enrollment
Local search method Simulated Annealing Hill Climbing
Scout bee solution
generation
Random generation Random
generation
Replacement of solutions in scout
bee phase
Unknown, since the authors did not report
on the value of
parameter limit used
Yes, carried out for the entire
population
Incorporate global
best solution information into
solution
No Yes, based on
global best concept inspired
from PSO
Improvement on
every solutions in
each iteration
No, selection
mechanism is used to
select solutions to be improved
Yes, all solutions
are improved
Selection mechanism Disruptive selection None
4.2.3 Goal of the proposed algorithm (GBABC)
As discussed earlier, the main purpose of this
GBABC is to strike a balance between the exploration and
exploitation ab ilities of a basic ABC, since the performance of
any meta-heuristic approaches is determined based on these
abilities. This balance is crucial as the algorithm’s
convergence speed is highly dependent on it [60]. W ith strong
exploration ability, the algorithm is powerfu l in exp loring
multip le search regions simultaneously, but it cannot locate
promising reg ions that may have the optimal g lobal solut ion.
The can be enhanced by allowing the algorithm to have certain
degree of exp loitation ability. However, as stated before, with
higher exp loration ability, the algorithm will take a longer
time to converge. Compromising on the algorithm’s
exploitation ability is not the best solution as well because the
algorithm may trap in the local optima when the search
process on search region is not wide enough.
In the basic ABC algorithm, its exploration ability is
higher than exploitation ab ility. Obviously, it means that the
basic ABC algorithm can exp lore many search regions at the
same t ime, but it takes a considerably longer time to converge
and may not locate the best global optimal solution. This is
the reason that the hill climbing optimization approach is
incorporated into the proposed GBABC algorithm to enhance
the exp loitation ability of ABC. This approach is preferred
International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 17
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
because it is a local search m approach that has satisfying
exploitation ability and does not possess any exploration
ability [61]. The global best concept inspired from the PSO,
on the other hand, is inserted into the employed bee phase so
that the algorithm will continuously explore promising regions .
This can reduce the effect o f randomization [62] in the scout
bee phase.
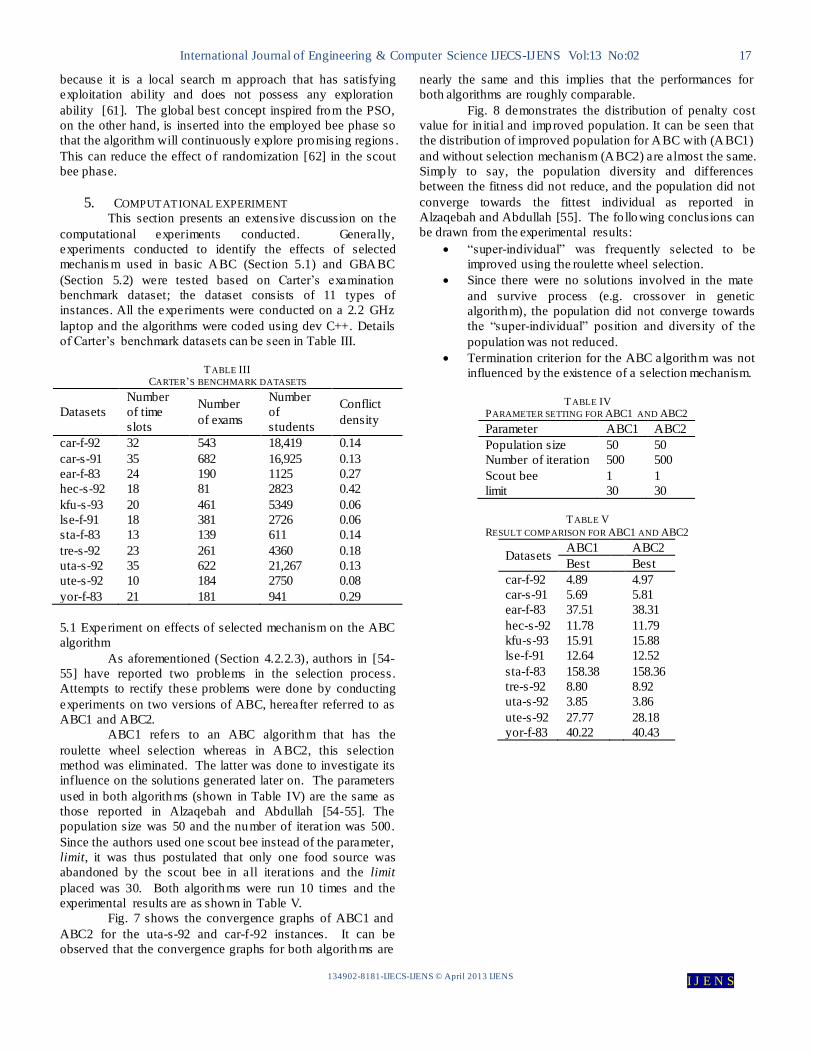
5. COMPUTATIONAL EXPERIMENT This section presents an extensive discussion on the
computational experiments conducted. Generally,
experiments conducted to identify the effects of selected
mechanis m used in basic ABC (Sect ion 5.1) and GBABC
(Section 5.2) were tested based on Carter’s examination
benchmark dataset; the dataset consists of 11 types of
instances. All the experiments were conducted on a 2.2 GHz
laptop and the algorithms were coded using dev C++. Details
of Carter’s benchmark datasets can be seen in Table III.
T ABLE III
CARTER’S BENCHMARK DATASETS
Datasets
Number
of time
slots
Number
of exams
Number
of
students
Conflict
density
car-f-92 32 543 18,419 0.14
car-s-91 35 682 16,925 0.13
ear-f-83 24 190 1125 0.27
hec-s-92 18 81 2823 0.42
kfu-s-93 20 461 5349 0.06
lse-f-91 18 381 2726 0.06
sta-f-83 13 139 611 0.14
tre-s-92 23 261 4360 0.18
uta-s-92 35 622 21,267 0.13
ute-s-92 10 184 2750 0.08
yor-f-83 21 181 941 0.29
5.1 Experiment on effects of selected mechanism on the ABC
algorithm
As aforementioned (Section 4.2.2.3), authors in [54-
55] have reported two problems in the selection process .
Attempts to rectify these problems were done by conducting
experiments on two versions of ABC, hereafter referred to as
ABC1 and ABC2.
ABC1 refers to an ABC algorithm that has the
roulette wheel selection whereas in ABC2, this selection
method was eliminated. The latter was done to investigate its
influence on the solutions generated later on. The parameters
used in both algorithms (shown in Table IV) are the same as
those reported in Alzaqebah and Abdullah [54-55]. The
population size was 50 and the number of iterat ion was 500.
Since the authors used one scout bee instead of the parameter,
limit, it was thus postulated that only one food source was
abandoned by the scout bee in all iterat ions and the limit
placed was 30. Both algorithms were run 10 times and the
experimental results are as shown in Table V.
Fig. 7 shows the convergence graphs of ABC1 and
ABC2 for the uta-s-92 and car-f-92 instances. It can be
observed that the convergence graphs for both algorithms are
nearly the same and this implies that the performances for
both algorithms are roughly comparable.
Fig. 8 demonstrates the distribution of penalty cost
value for in itial and improved population. It can be seen that
the distribution of improved population for ABC with (ABC1)
and without selection mechanism (ABC2) are almost the same.
Simply to say, the population diversity and differences
between the fitness did not reduce, and the population did not
converge towards the fittest individual as reported in
Alzaqebah and Abdullah [55]. The fo llowing conclusions can
be drawn from the experimental results:
“super-individual” was frequently selected to be
improved using the roulette wheel selection.
Since there were no solutions involved in the mate
and survive process (e.g. crossover in genetic
algorithm), the population did not converge towards
the “super-individual” position and diversity of the
population was not reduced.
Termination criterion for the ABC algorithm was not
influenced by the existence of a selection mechanism.
T ABLE IV
PARAMETER SETTING FOR ABC1 AND ABC2
Parameter ABC1 ABC2
Population size 50 50
Number of iteration 500 500
Scout bee 1 1
limit 30 30
T ABLE V
RESULT COMPARISON FOR ABC1 AND ABC2
Datasets ABC1 ABC2
Best Best
car-f-92 4.89 4.97
car-s-91 5.69 5.81
ear-f-83 37.51 38.31
hec-s-92 11.78 11.79
kfu-s-93 15.91 15.88
lse-f-91 12.64 12.52
sta-f-83 158.38 158.36
tre-s-92 8.80 8.92
uta-s-92 3.85 3.86
ute-s-92 27.77 28.18
yor-f-83 40.22 40.43

International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 18
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
3.8
3.9
4
4.1
4.2
4.3
4.4
0 100 200 300 400 500
Co
st P
en
alty
Iteration
ABC-with selection scheme
ABC-without selection scheme
4.8
5
5.2
5.4
5.6
5.8
0 100 200 300 400 500
Co
st P
en
alty
Iteration
ABC-with selection scheme
ABC-without selection scheme
(a)
(b)
Fig. 7. Convergence graphs for (a) uta-s-92 and (b) car-f-92
(a)
(b)
Fig. 8. Cost penalty value for initial and improved population for instance of car-f-92 (a) with selection mechanism (b) without selection mechanism
5.2 Experiment on proposed algorithm
Table VI illustrates the parameter setting for both
GBABC and ABC; the parameters have been selected based
on some preliminary experiments. From the preliminary
experimental results, it seems that the most crucial parameter
is the number of timeslot for the haploid crossover process
(incorporation of g lobal best solution information). The
higher the number of time slot selected for haploid crossover,
the more the focus is placed on leading the search towards the
global best solution area, and the lower the diversity of the
population. On the contrary, if the number o f t ime slot
selected for crossover process is too small, the search process
will possess random exploration characteristic.
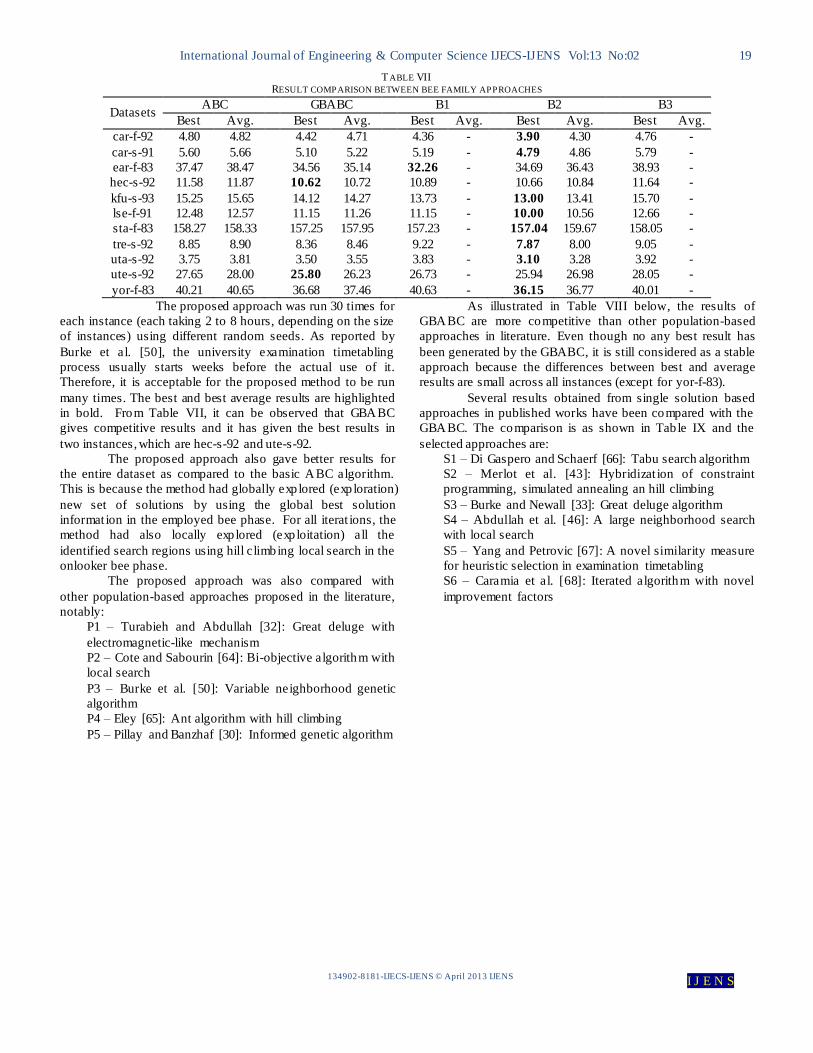
Table VII demonstrates a comparison of the results of
basic ABC, proposed approach (GBABC), and bee family
methods that have been applied on this domain. The bee
family methods are divided into:
B1 - Alzaqebah and Abdullah [54]: Hybrid ization of ABC
with simulated annealing
B2 - Sabar et al. [29]: Honey bee mating optimization
B3 - Alzaqebah and Abdullah [63]: Bees Algorithm
T ABLE VI
PARAMETER SETTING FOR GBABC AND ABC
Parameter GBABC ABC
Population size 50 50
Number of iteration 3000 3000
Local search (hill climbing) iteration 1000 -
Crossover (haploid) points 8 -
limit - 30
International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 19
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
T ABLE VII RESULT COMPARISON BETWEEN BEE FAMILY APPROACHES
Datasets ABC GBABC B1 B2 B3
Best Avg. Best Avg. Best Avg. Best Avg. Best Avg.
car-f-92 4.80 4.82 4.42 4.71 4.36 - 3.90 4.30 4.76 -
car-s-91 5.60 5.66 5.10 5.22 5.19 - 4.79 4.86 5.79 -
ear-f-83 37.47 38.47 34.56 35.14 32.26 - 34.69 36.43 38.93 -
hec-s-92 11.58 11.87 10.62 10.72 10.89 - 10.66 10.84 11.64 -
kfu-s-93 15.25 15.65 14.12 14.27 13.73 - 13.00 13.41 15.70 -
lse-f-91 12.48 12.57 11.15 11.26 11.15 - 10.00 10.56 12.66 -
sta-f-83 158.27 158.33 157.25 157.95 157.23 - 157.04 159.67 158.05 -
tre-s-92 8.85 8.90 8.36 8.46 9.22 - 7.87 8.00 9.05 -
uta-s-92 3.75 3.81 3.50 3.55 3.83 - 3.10 3.28 3.92 -
ute-s-92 27.65 28.00 25.80 26.23 26.73 - 25.94 26.98 28.05 -
yor-f-83 40.21 40.65 36.68 37.46 40.63 - 36.15 36.77 40.01 -
The proposed approach was run 30 times for
each instance (each taking 2 to 8 hours, depending on the size
of instances) using different random seeds. As reported by
Burke et al. [50], the university examination timetabling
process usually starts weeks before the actual use of it.
Therefore, it is acceptable for the proposed method to be run
many times. The best and best average results are highlighted
in bold. From Table VII, it can be observed that GBABC
gives competitive results and it has given the best results in
two instances, which are hec-s-92 and ute-s-92.
The proposed approach also gave better results for
the entire dataset as compared to the basic ABC algorithm.
This is because the method had globally exp lored (exp loration)
new set of solutions by using the global best solution
informat ion in the employed bee phase. For all iterat ions, the
method had also locally exp lored (exp loitation) all the
identified search regions using hill climbing local search in the
onlooker bee phase.
The proposed approach was also compared with
other population-based approaches proposed in the literature,
notably:
P1 – Turabieh and Abdullah [32]: Great deluge with
electromagnetic-like mechanism
P2 – Cote and Sabourin [64]: Bi-objective algorithm with
local search
P3 – Burke et al. [50]: Variable neighborhood genetic
algorithm
P4 – Eley [65]: Ant algorithm with hill climbing
P5 – Pillay and Banzhaf [30]: Informed genetic algorithm
As illustrated in Table VIII below, the results of
GBABC are more competitive than other population-based
approaches in literature. Even though no any best result has
been generated by the GBABC, it is still considered as a stable
approach because the differences between best and average
results are small across all instances (except for yor-f-83).
Several results obtained from single solution based
approaches in published works have been compared with the
GBABC. The comparison is as shown in Tab le IX and the
selected approaches are:
S1 – Di Gaspero and Schaerf [66]: Tabu search algorithm
S2 – Merlot et al. [43]: Hybridizat ion of constraint
programming, simulated annealing an hill climbing
S3 – Burke and Newall [33]: Great deluge algorithm
S4 – Abdullah et al. [46]: A large neighborhood search
with local search
S5 – Yang and Petrovic [67]: A novel similarity measure
for heuristic selection in examination timetabling
S6 – Caramia et al. [68]: Iterated algorithm with novel
improvement factors

International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 20
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
T ABLE VIII RESULT COMPARISON BETWEEN GBABC AND OTHER POPULATION-BASED APPROACHES IN THE LITERATURE
Datasets GBABC P1 P2 P3 P4 P5
Best Avg. Best Avg. Best Avg. Best Best Best
car-f-92 4.42 4.71 4.10 4.89 4.20 4.40 3.90 - 4.20
car-s-91 5.10 5.22 4.28 4.80 5.20 5.50 4.60 - 4.90
ear-f-83 34.56 35.14 34.92 35.93 34.20 35.60 32.80 - 35.90
hec-s-92 10.62 10.72 10.73 10.82 10.20 16.50 10.00 11.70 11.50
kfu-s-93 14.12 14.27 13.00 13.53 14.20 14.40 13.00 15.80 14.40
lse-f-91 11.15 11.26 10.01 10.21 11.20 11.50 10.00 13.30 10.90
sta-f-83 157.25 157.95 158.26 159.69 157.20 157.60 156.90 157.90 157.80
tre-s-92 8.36 8.46 7.88 7.97 8.20 8.80 7.90 - 8.40
uta-s-92 3.50 3.55 3.20 3.27 3.20 3.60 3.20 - 3.40
ute-s-92 25.80 26.23 26.11 27.00 25.20 25.50 24.80 26.70 27.20
yor-f-83 36.68 37.46 36.22 36.27 36.20 37.50 34.90 40.70 39.30
T ABLE IX
RESULT COMPARISON BETWEEN GABC AND OTHER SINGLE SOLUTION BASED APPROACHES IN THE LITERATURE
Datasets GBABC S1 S2 S3 S4 S5 S6
Best Avg. Best Avg. Best Avg. Best Best Best Best
car-f-92 4.42 4.71 5.20 5.60 4.30 4.40 4.10 4.40 3.93 6.00
car-s-91 5.10 5.22 6.20 6.50 5.10 5.20 4.65 5.20 4.50 6.60
ear-f-83 34.56 35.14 45.70 46.70 35.10 35.40 37.05 34.90 33.70 29.30
hec-s-92 10.62 10.72 12.40 12.60 10.60 10.70 11.54 10.30 10.83 9.20
kfu-s-93 14.12 14.27 18.00 19.50 13.50 14.00 13.90 13.50 13.82 13.80
lse-f-91 11.15 11.26 15.50 15.90 10.50 11.00 10.82 10.20 10.35 9.60
sta-f-83 157.25 157. 95 160.80 166.80 157.30 157.40 168.73 159.20 158.30 158.20
tre-s-92 8.36 8.46 10.00 10.50 8.40 8.60 8.35 8.40 7.92 9.40
uta-s-92 3.50 3.55 4.20 4.50 3.50 3.60 3.20 3.60 3.14 3.50
ute-s-92 25.80 26.23 29.00 31.30 25.10 25.20 25.83 26.00 25.39 24.40
yor-f-83 36.68 37.46 41.00 42.10 37.40 37.90 37.28 36.20 36.35 36.20
Table IX reveals that although GBABC is capable of
generating only one best result (sta-f-83), it still manages to
produce competitive results as compared with the state-of-the-
art approaches. On average, the GBABC has produced good
quality results for 4 instances, which are ear-s-91, tre-s-92,
uta-s-92 and yor-f-83.
Fig. 9 illustrates the convergence graph for ute-s-92
instance. The x-axis represents the iteration number while the
y-axis represents the best cost penalty value found along the
search. As refer to Fig. 9, there is a relatively steep slope at the
early of the search process indicates that there is a large
improvement in term of the penalty cost value. This probably
due to the exp loration process of the search is guided by using
the valuable information from g lobal best solution (global best
concept) which leads the search towards promising search
region. In addition, it is also believed that the used of strong
exploitation hill climbing local search capable to fine-tuning
the promising search region in searching local optimal
solutions. However, the improvement of the solutions quality
is decreases gradually as the number of iterat ion increases and
the search converges at end of the search process.
Fig. 10 illustrates the boxplots of the distribution of
penalty cost for all instances in the Carter dataset. It can be
seen that the differences between the best, median, and worse
penalty cost value are s mall. This shows that the hill climbing
optimization method and global best concept had enhanced the
exploitation ab ility of basic ABC and could lead the search
process explore towards promising search regions.
Fig. 9. Convergence graph for ute-s-92 instance
6. CONCLUSION
In this study, an automated approach, Global Best
Concept - Artificial Bee Colony (GBABC) algorithm has been
presented and applied in addressing university examination
timetabling problem. This method is different from
conventional ABC algorithm in three ways. Firstly, with the
use of the PSO global best concept in the employed bee phase,

International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 21
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
all the solutions generated in the scout bee phase had been
successfully incorporated with the global best information.
Thus, the search process was guided to exp lore pro mising
search regions. Secondly, the local search process was applied
to locally exp lore promising solutions in the onlooker bee
phase. Lastly, the abandon of all solutions in the scout bee
phase for all iterations was done to allow the search to escape
from local optima. In short, both modified employed and
onlooker bee phases had improved the convergence speed of
ABC.
Fig. 10. Boxplots of the penalty cost for each instances in Carter dataset
To assess the performance of GBABC, both ABC
and GBABC were tested on their ability to rectify
examination timetabling benchmark problem. Experimental
results demonstrated that solutions generated by GBABC
outperformed ABC in all instances. In addition, this study
has also demonstrates that the important of exploration and
exploitation abilities in searching solutions in the search
region. Other than that, an experiment was carried out to
verify the performance of selection mechanis m, similar to
that reported by Alzaqebah and Abdullah [54-55]. In short,
this GBABC can be implemented on other timetabling
process easily, for instance, the university course timetable
(similar to examination timetabling problem to some extent
but there are significant differences between them) in order
to demonstrate the generality of GBABC. Besides that, the
performance (exp loitation power) o f GBABC can be further
improved using more sophisticated local search methods
such as great deluge algorithm or simulated annealing. In
addition, the explorat ion power of GBABC can also improve
by using more advanced exp loration mechanis m and this is
subjected to future works.
To conclude, this study has contributed in the
following ways:
This study has demonstrated that the application of
PSO g lobal best concept in basic ABC algorithm can
lead the search process towards exp loring promising
search regions.
It has also been illustrated that the exploration and
exploitation of new candidate solutions for all
iterations can be done by exploring and exp loit ing a
wider solution search region. This had allowed the
proposed GBABC algorithm to escape from local
optima to give good solutions and the improved the
convergence speed.
The informat ion presented in this paper are less
misleading than those reported in Alzaqebah and
Abdullah [54-55].
REFERENCES
[1] Pezzella F, Morganti G, Ciaschetti G. A genetic algorithm for the flexible job-shop scheduling problem. Computers & Operations
Research. 2008;35(10):3202-12. [2] Gao J, Sun L, Gen M. A hybrid genetic and variable neighborhood
descent algorithm for flexible job shop scheduling problems. Computers & Operations Research. 2008;35(9):2892-907.
[3] Zhang CY, Li P, Rao Y, Guan Z. A very fast TS/SA algorithm for the job shop scheduling problem. Computers & Operations Research. 2008;35(1):282-94.
[4] Huang K-L, Liao C-J. Ant colony optimization combined with
taboo search for the job shop scheduling problem. Computers & Operations Research. 2008;35(4):1030-46.
[5] Tasgetiren MF, Pan Q-K, Suganthan PN, Chen AHL. A discrete
artificial bee colony algorithm for the total flowtime minimization in permutation flow shops. Information Sciences. 2011;181(16):3459-75.
[6] Liu B, Wang L, Jin Y-H. An effective hybrid PSO-based algorithm
for flow shop scheduling with limited buffers. Computers & Operations Research. 2008;35(9):2791-806.
[7] Pan Q-K, Fatih Tasgetiren M, Liang Y-C. A discrete particle swarm optimization algorithm for the no-wait flowshop scheduling
problem. Computers & Operations Research. 2008;35(9):2807-39. [8] Xiao J, Ao X-T, Tang Y. Solving software project scheduling
problems with ant colony optimization. Computers & Operations Research. 2013;40(1):33-46.
[9] Sha DY, Hsu C-Y. A new particle swarm optimization for the open shop scheduling problem. Computers & Operations Research. 2008;35(10):3243-61.
[10] Yang S-J, Yang D-L. Minimizing the makespan on single-machine scheduling with aging effect and variable maintenance activities. Omega. 2010;38(6):528-33.
[11] Lee WC, Wu CC, Hsu PH. A single-machine learning effect
scheduling problem with release times. Omega. 2010;38(1):3-11. [12] Liao CJ, Juan HC. An ant colony optimization for single-machine
tardiness scheduling with sequence-dependent setups. Computers & Operations Research. 2007;34(7):1899-909.
[13] Yang S-J, Yang D-L. Minimizing the total completion time in single-machine scheduling with aging/deteriorating effects and deteriorating maintenance activities. Comput Math Appl. 2010;60(7):2161-9.
[14] Liao C-J, Juan H-C. An ant colony optimizat ion for single-machine tardiness scheduling with sequence-dependent setups. Computers & Operations Research. 2007;34(7):1899-909.
[15] Caramia M, Guerriero F. A heuristic approach to long-haul freight transportation with multiple objective functions. Omega. 2009;37(3):600-14.
[16] Carter MW, Laporte G. Recent developments in practical
examination timetabling. Selected papers from the First International Conference on Practice and Theory of Automated T imetabling: Springer-Verlag; 1996. p. 3-21.
[17] Qu R, Burke EK, McCollum B. Adaptive automated construction
of hybrid heuristics for exam timetabling and graph colouring problems. European Journal of Operational Research. 2009;198(2):392-404.
International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 22
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
[18] Qu R, Burke EK, McCollum B, Merlot LT, Lee SY. A survey of search methodologies and automated system development for
examination timetabling. J of Scheduling. 2009;12(1):55-89. [19] Carter MW, Laporte G, Lee SY. Examination timetabling:
algorithmic strategies and applications. The Journal of the Operational Research Society. 1996;47(3):373-83.
[20] Sabar NR, Ayob M, Kendall G, Qu R. Roulette wheel graph colouring for solving examination timetabling problems. Lecture Notes in Computer Science, Combinatorial Optimization and Applications. 2009;Volume 5573:Pages 463-70.
[21] Malik AMA, Ayob M, Hamdan AR. Iterated two-stage multi-neighbourhood tabu search approach for examination timetabling problem. 2nd Conference on Data Mining and Optimization (DMO) 2009. p. 141-8.
[22] Malik AMA, Othman AK, Ayob M, Hamdan AR. Hybrid integrated two-stage multi-neighbourhood tabu search-EMCQ technique for examination timetabling problem. 3rd Conference
on Data Mining and Optimization (DMO) 2011. p. 232-6. [23] Malik AMA, Ayob M, Hamdan AR. Stratified random sampling
technique for integrated two-stage multi-neighbourhood tabu search for examination timetabling problem. 10th International
Conference on Intelligent Systems Design and Applications (ISDA) 2010. p. 1326-31.
[24] Abdullah S, Ahmadi S, Burke EK, Dror M, McCollum B. A tabu-based large neighbourhood search methodology for the capacitated
examination timetabling problem. Journal of the Operational Research Society. 2007;58(11):1494-502.
[25] Gaspero LD, Schaerf A. Tabu search techniques for examination timetabling. Lecture Notes In Computer Science Selected papers
from the Third International Conference on Practice and Theory of Automated T imetabling III. London, UK: Springer-Verlag; 2000 p. 104-17
[26] Thompson J, Dowsland K. Variants of simulated annealing for the examination timetabling problem. Ann Oper Res. 1996;63(1):105-28.
[27] Thompson J, Dowsland K. General cooling schedules for a
simulated annealing based timetabling system. In: Burke E, Ross P, (Eds.) Practice and Theory of Automated T imetabling: Springer Berlin Heidelberg; 1996. p. 345-63.
[28] Thompson J, Dowsland K. A robust simulated annealing based
examination timetabling system. Computers & Operations Research. 1998;25(7):637-48.
[29] Sabar NR, Ayob M, Kendall G, Qu R. A honey-bee mating optimization algorithm for educational timetabling problems.
European Journal of Operational Research. 2012;216(3):533-43. [30] Pillay N, Banzhaf W. An informed genetic algorithm for the
examination timetabling problem. Applied Soft Computing. 2010;10(2):457-67.
[31] Abdullah S, Turabieh H. Generating university course timetable using genetic algorithms and local search. Proceedings of the 2008 Third International Conference on Convergence and Hybrid
Information Technology: IEEE Computer Society; 2008. p. 254-60. [32] Turabieh H, Abdullah S. An integrated hybrid approach to the
examination timetabling problem. Omega. 2011;39(6):598-607. [33] Burke EK, Newall J. Enhancing timetable solutions with local
Search methods. In: P.Decausmaecker ebEKBa, (Ed.). PATAT 2002 : practice and theory of automated timetabling IV : Selected Revised Papers from the 4th international conference on the Practice and Theory of Automated T imetabling (PATAT 2002).
Gent, Belgium: SpringerLink 2003. p. 195-206. [34] McCollum B, McMullan PJ, Parkes AJ, Burke EK, Abdullah S.
An extended great deluge approach to the examination timetabling problem Proceedings of the 4th Multidisciplinary International
Scheduling Conference: Theory and Applications (MISTA 2009): Dublin; 2009. p. pp 424-34.
[35] Turabieh H, Abdullah S, McCollum B. Electromagnetism-like
mechanism with force decay rate great deluge for the course timetabling problem. Proceedings of the 4th International Conference on Rough Sets and Knowledge Technology. Gold Coast, Australia: Springer-Verlag; 2009. p. 497-504.
[36] Turabieh H, Abdullah S. A hybrid fish swarm optimisation algorithm for solving examination timetabling problems.
Proceedings of the 5th international conference on Learning and Intelligent Optimization. Rome, Italy: Springer-Verlag; 2011. p.
539-51. [37] Carter MW, Laporte G. Recent developments in practical course
timetabling. Selected papers from the Second International Conference on Practice and Theory of Automated Timetabling II:
Springer-Verlag; 1998. p. 3-19. [38] Werra Dd. An introduction to timetabling. European Journal of
Operational Research. 1985;19:151-62. [39] Burke EK, Petrovic S. Recent research directions in automated
timetabling. European Journal of Operational Research. 2002;140(2):266-80.
[40] Zhu G, Kwong S. Gbest -guided artificial bee colony algorithm for numerical function optimization. Applied Mathematics and
Computation. 2010;217 (7):pp. 3166-73. [41] Burke EK, Bykov Y, Newall J, Petrovic S. A time-predefined local
search approach to exam timetabling problems. Yugoslav Journal
of Operations Research (YUJOR). 2003;13:139-51. [42] Burke EK, Bykov Y, Newall J, Petrovic S. A time-predefined
approach to course timetabling. Yugoslav Journal of Operations Research. 2003;13(2).
[43] Merlot LG, Boland N, Hughes B, Stuckey P. A hybrid algorithm for the examination timetabling problem. In: Burke E, Causmaecker P, (Eds.) Practice and Theory of Automated T imetabling IV: Springer Berlin Heidelberg; 2003. p. 207-31.
[44] Hussin N, Kendall G. An Investigation of a tabu-search-based hyper-heuristic for examination timetabling Multidisciplinary Scheduling: Theory and Applications. 2005;Part 8:309-28.
[45] Abdullah S, Ahmadi S, Burke EK, Dror M, McCollum B. A tabu-
based large neighbourhood search methodology for the capacitated examination timetabling problem. Journal of the Operational Research Society. 2006;58(11):1494-502.
[46] Abdullah S, Ahmadi S, Burke EK, Dror M. Invest igating Ahuja–Orlin’s large neighbourhood search approach for examination t imetabling. OR Spectrum. 2007;29(2):351-72.
[47] Abdullah S, Burke EK, McCollum B. A hybrid evolutionary
approach to the university course timetabling problem. CEC20072007. p. pp. 1764–8.
[48] Al-Betar MA, Khader AT, Nadi F. Selection mechanisms in memory consideration for examination timetabling with harmony
search. Proceedings of the 12th annual conference on Genetic and evolutionary computation: ACM; 2010. p. 1203-10.
[49] Burke EK, Elliman D, Ford P, Weare R. Examination timetabling in british universities: a survey. Selected papers from the First
International Conference on Practice and Theory of Automated T imetabling: Springer-Verlag; 1996. p. 76-90.
[50] Burke EK, Eckersley AJ, McCollum B, Petrovic S, Qu R. Hybrid variable neighbourhood approaches to university exam timetabling.
European Journal of Operational Research 206. 2010:46–53. [51] Lewis R. A survey of metaheuristic-based techniques for
university timetabling problems. OR Spectrum. 2008;30(1):167-90.
[52] Karaboga D. An idea based on honey bee swarm for numerical optimization. Erciyes University; 2005.
[53] Karaboga D, Gorkemli B, Ozturk C, Karaboga N. A comprehensive survey: artificial bee colony (ABC) algorithm and
applications. Artificial Intelligence Review. 2012:1-37. [54] Alzaqebah M, Abdullah S. Hybrid artificial bee colony search
algorithm based on disruptive selection for examination timetabling problems. Proceedings of the 5th international
conference on Combinatorial optimization and applications. Zhangjiajie, China: Springer-Verlag; 2011. p. 31-45.
[55] Alzaqebah M, Abdullah S. Comparison on the selection strategies in the artificial bee colony algorithm for examination timetabling
problems. International Journal of Soft Computing and Engineering (IJSCE). 2011;1(5).
[56] Kennedy J, Eberhart RC. A discrete binary version of the particle
swarm optimization. In: Proceedings of the World Multiconference on Systemics Cybernetics and Informatics. IEEE Service Center, Piscatway. NJ.: IEEE Service Center, Piscatway. NJ.; 1997. p. pp. 4104-9.
[57] Asmuni H, Burke EK, Garibaldi JM, McCollum B, Parkes AJ. An investigation of fuzzy multiple heuristic orderings in the

International Journal of Engineering & Computer Science IJECS-IJENS Vol:13 No:02 23
134902-8181-IJECS-IJENS © April 2013 IJENS I J E N S
construction of university examination timetables. Comput Oper Res. 2009;36(4):981-1001.
[58] Abbass HA. Marriage in honey-bee optimization (MBO): A haplometrosis polygynous swarming approach. CEC 2001. Seoul, Korea2001. p. pp. 207–14.
[59] Abbass HA. A monogenous MBO approach to satisfiability. In:
Proceeding of the International Conference on Computational Intelligence for Modeling, Control and Automation, CIMCA’2001. Las Vegas, NV, USA.2001.
[60] Al-Betar MA, Khader AT, Zaman M. University course
timetabling using a hybrid harmony search metaheuristic algorithm. Systems, Man, and Cybernetics, Part C: Applications and Reviews, IEEE Transactions on. 2012;42(5):664-81.
[61] Beyer H-G. On the “Explorative power” of ES/EP-like algorithms.
In: Porto VW, Saravanan N, Waagen D, Eiben AE, (Eds.) Evolutionary Programming VII: Springer Berlin Heidelberg; 1998. p. 323-34.
[62] Blum C, Roli A. Metaheuristics in combinatorial optimization: Overview and conceptual comparison. ACM Comput Surv. 2003;35(3):268-308.
[63] Alzaqebah M, Abdullah S. The bees algorithm for examination
timetabling problems. International Journal of Soft Computing. 2011;1.
[64] Cote P, Sabourin R. A hybrid multi-objective evolutionary algorithm for the uncapacitated exam proximity problem. Papers
from the 5th International Conference on the Practice and Theory of Automated T imetabling, Lecture Notes in Computer Science: Springer; 2005. p. pp. 294–312.
[65] Eley M. Ant algorithms for the exam timetabling problem. In: In:
Burke EK, Rudova, H. (Eds.), LNCS, (Ed.). PATAT 2007: Springer, Heidelberg; 2007. p. pp. 364–82.
[66] Gaspero LD, Schaerf A. Tabu search techniques for examination
timetabling. Selected papers from the Third International Conference on Practice and Theory of Automated T imetabling III: Springer-Verlag; 2001. p. 104-17.
[67] Yang Y, Petrovic S. A novel similarity measure for heuristic
selection in examination timetabling. Proceedings of the 5th international conference on Practice and Theory of Automated T imetabling. Pittsburgh, PA: Springer-Verlag; 2005. p. 247-69.
[68] Caramia M, Dell'Olmo P, Italiano GF. New algorithms for
examination timetabling. Proceedings of the 4th International Workshop on Algorithm Engineering: Springer-Verlag; 2001. p. 230-42.





























