Embed Size (px)
DESCRIPTION
Mathematical Model for a paper winding machine
Citation preview

Winding machine Mathematical Model
Firstly Motor Drive
Motor Dynamics is separated into 3 Stages:
1. Electrical Dynamics equation.
Representing the dynamics of the motor Electrical
Circuit
2. Electromechanical Linkage equation.
Representing the Electromagnetic Torque Developed
from the electric circuit.
3. Mechanical Dynamics equations.
Representing the Dynamics of the motor mechanical
Drive (Mechanical System coupled to motor ).

Bipolar Stepper Motor Mathematical Model
Bipolar Stepper motor Construction:
1. A multi pole permanent magnet Rotor.
2. Multiple Stator Winding creating Stator phases.
Theory of operation:
When energizing a certain stator phase a magnetic field in direction of the stator
phase is induced, this field produces a torque over the rotor causing the rotor to
rotate until is aligns with the field.
So when energizing the stator phases in sequence a rotating magnetic field is
produced and the rotor rotates trying to align with the rotating magnetic field.

Mathematical Model
Electrical Equations:
Assume a 2 phase (a and b) Stepper motor
Each phase can be represented by this equation
𝑉𝑎 = 𝑅𝑎𝑖𝑎 + 𝐿𝑎
𝑑𝑖𝑎
𝑑𝑡+ 𝑒𝑎
𝑒𝑎 = −𝐾𝑚�̇� sin(𝑁𝑟 𝜃)
Where
𝑉𝑎: Phase a applied Voltage [Volt].
𝑅𝑎: Phase a winding Resistance [Ohm].
𝑖𝑎: Phase a Current [ampere].
𝐿𝑎: Phase a winding inductance [H].
𝑒𝑎 : Back emf (electromagnetic force) induced in phase a [Volt].
𝐾𝑚: Electromotive Force Constant, (Motor Torque constant) [𝑉𝑜𝑙𝑡. 𝑠𝑒𝑐 𝑟𝑎𝑑⁄ ]
Same equations represents phase b.

Electromechanical Torque Equation: In the Stepper Motor case the Torque developed over the rotor is the sum of the torque induced from each phase.
The Torque developed by each stator phase is dependent on the position of the
rotor in reference to that phase (as mentioned before) maximum torque when the phase induced magnetic field is perpendicular on the rotor (rotor field line
which connects the rotor poles) and minimum torque is when the rotor is aligned with the phase magnetic field.
this relation is represented by a sinusoidal wave (sine for first phase and cosine
for next phase as it varies with 90 mechanical degree )
So:
𝑇𝑚 = −𝐾𝑚 (𝑖𝑎 −𝑒𝑎
𝑅𝑚) sin(𝑁𝑟𝜃) + 𝐾𝑚 (𝑖𝑏 −
𝑒𝑏
𝑅𝑚) cos(𝑁𝑟𝜃)
Where:
𝜃: Rotor Position
𝐾𝑚: Motor Torque Constant [𝑁. 𝑚 𝐴𝑚𝑝]⁄
𝑖𝑎 : phase a current [𝐴𝑚𝑝 ]
𝑖𝑏 : phase b current [𝐴𝑚𝑝 ]
𝑒𝑎 : Back emf (electromagnetic force) induced in phase a [volt]
𝑒𝑏 : Back emf (electromagnetic force) induced in phase b [volt].
𝑁𝑟: Is the number of teeth on each of the two rotor poles. The Full step
size parameter is (π/2)/Nr.
𝑅𝑚: Magnetizing Resistance in case of neglecting iron losses it’s assumed to
be infinite which causes the term ( 𝑒𝑎
𝑅𝑚= 0 ).
As Shown the system equations is nonlinear.

Dc Motor Model
Dc Motors Control Techniques:
1. Armature Control.
2. Field Control.

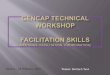
Armature Controlled Dc Motor Mathematical Model:
Fig 1 Armature Controlled Dc Motor Schematic
Electrical Equations:
𝑉𝑎 = 𝑅𝑎 𝑖𝑎 + 𝐿𝑎
𝑑𝑖𝑎
𝑑𝑡+ 𝑉𝑏𝑒𝑚𝑓
𝑉𝑏𝑒𝑚𝑓 = 𝐾𝑏𝑒𝑚𝑓 �̇�
Where:
𝑉𝑎: Voltage applied over Motor Armature [Volt].
𝑅𝑎: Armature Resistance [Ohm].
𝑖𝑎: Armature Current [ampere].
𝐿𝑎: Armature Inductance [H].
𝑉𝑏𝑒𝑚𝑓 : Back volt induced from rotor into armature [Volt].
𝐾𝑏𝑒𝑚𝑓:Electromotive Force Constant [𝑉𝑜𝑙𝑡. 𝑠𝑒𝑐 𝑟𝑎𝑑⁄ ]

Taking Laplace Transform
𝑉𝑎(𝑠) = 𝑖𝑎(𝑠)(𝑅𝑎 + 𝑠𝐿𝑎) + 𝑠𝐾𝑏𝑒𝑚𝑓 𝜃
Current volt Transfer Function 𝑖𝑎(𝑠)
𝑉𝑎(𝑠)−𝐾𝑏𝑒𝑚𝑓 �̇�(𝑠)=
1
𝑅𝑎+𝑠𝐿𝑎
Electromechanical Torque Equation: In general, the torque generated by a DC motor is proportional to the armature current and the strength of the magnetic field.
𝑇𝑚 = 𝐾𝑖𝑎𝑖𝑓
The Strength of the magnetic field is constant as its armature controlled so:
𝑇𝑚 = 𝐾𝑚𝑖𝑎
Where:
𝐾𝑚: Motor Torque Constant [𝑁. 𝑚 𝐴𝑚𝑝]⁄
𝑖𝑎 : Armature current [𝐴𝑚𝑝 ]
Current to Torque Transfer function
𝑇𝑚 (𝑠)
𝑖𝑎 (𝑠)= 𝐾𝑚
So Volt Torque Transfer Function: 𝑇𝑚(𝑠)
𝑉𝑎(𝑠)−𝐾𝑏𝑒𝑚𝑓�̇�(𝑠)=
𝑖𝑎(𝑠)
𝑉𝑎(𝑠)−𝐾𝑏𝑒𝑚𝑓�̇�(𝑠) .
𝑇𝑚(𝑠)
𝑖𝑎(𝑠)=
𝐾𝑚
𝑅𝑎+𝑠𝐿𝑎

Field Controlled Dc Motor Model:
In Field Controlled Dc motor the armature current is kept constant, the torque is
controlled by modulating the magnetic flux.
The magnetic field is controlled by controlling the voltage applied on the field
winding (𝑉𝑓) so in this case the manipulated variable is field winding Voltage
(𝑉𝑓).

Electrical equation:
𝑉𝑓 = 𝑅𝑓 𝑖𝑓 + 𝐿𝑓
𝑑𝑖𝑓
𝑑𝑡
𝑉𝑓: Voltage applied over Motor field winding [Volt].
𝑅𝑓: Field winding Resistance [Ohm].
𝑖𝑓: Field winding Current [ampere].
𝐿𝑓: Field winding Inductance [H].
Taking Laplace Transform
𝑉𝑓 (𝑠) = 𝑅𝑓 𝑖𝑓(𝑠) + 𝑠𝐿𝑓 𝑖𝑓(𝑠)
𝑖𝑓(𝑠)
𝑉𝑓(𝑠)=
1
𝑅𝑓 + 𝑠𝐿𝑓
Electromechanical Torque:
As armature current is constant
𝑇𝑚 = 𝐾𝑚𝑖𝑓
𝐾𝑚: Motor Torque Constant [𝑁. 𝑚 𝐴𝑚𝑝]⁄
𝑖𝑓 : Field winding current [𝐴𝑚𝑝 ]
Current to Torque Transfer function:
𝑇𝑚 (𝑠)
𝑖𝑓(𝑠)= 𝐾𝑚
So Volt Torque Transfer Function: 𝑇𝑚(𝑠)
𝑉𝑓(𝑠)=
𝑖𝑓(𝑠)
𝑉𝑓(𝑠).
𝑇𝑚(𝑠)
𝑖𝑓(𝑠)=
𝐾𝑚
𝑅𝑓+𝑠𝐿𝑓

𝑇𝑙 = 𝐹𝑡1𝑟𝑤𝑖𝑛𝑑𝑒𝑟
𝑇𝑙 :Load Torque over the winder Driver
𝐹𝑡1: Web Tension force at Winder Region (Control Variable).
𝐹𝑡0: Web Tension force at unWinder Region (assumed constant).
𝑉𝑜 : Winder Tangential Velocity.
𝑉1 : unwinder Tangential Velocity.
𝑑𝑑𝑎𝑛𝑐𝑒𝑟 : Displacement of Dancer.
𝑟𝑤𝑖𝑛𝑑𝑒𝑟 :Raduis of winder cylinder.
𝑉𝑑 : Dancer Velocity𝑉𝑑 =𝑑𝑑𝑑𝑎𝑛𝑐𝑒𝑟
𝑑𝑡.
𝑟𝑤𝑖𝑛𝑑𝑒𝑟
𝑑𝑑𝑎𝑛𝑐𝑒𝑟
𝐹𝑡1
𝐹𝑡1 𝐹𝑡𝑜

Model Assumptions:
1. The paper velocity from the unwinder is constant
2. The cross section area of the web is uniform
3. The definition of strain is normal and only small deformation is
expected.
4. The deformation of the web material is elastic this assumption is used
because plastic deformation is unwanted during the winding process and
quite difficult to model.
5. The density of the web is unchanged
6. The dancer movement is negligible compared to the length of the web between the unwinder and the winder.
7. The speed of the dancer is negligible compared to the speed of the web
𝑉𝑑<<𝑉1
8. The web material is very stiff, hence 𝑉𝑜≈𝑉1
If assumption 6 is correct and the material is stiff the unwinder paper
speed and the winder paper speed is approximately the same.
9. The tension in the unwinder section is constant.
10. The change of roll radius does not change the web length between the
winders:
as one radius is increasing the other is decreasing therefore the changing
radius is estimated to only having little influence on the web length and
is therefore neglected.

Mechanical Equations:
In our case we have two torques opposing the torque from the motor:
1. The tension in the web is acting as the load on the winder motor
𝑇𝑙 = 𝐹𝑡1𝑟𝑤𝑖𝑛𝑑𝑒𝑟
2. Friction Torque Consisting of :
a. Coulomb Friction (Static Friction) throughout the Drive
system (as in bearing , Gears …etc.)
𝑇𝑐𝑜𝑢𝑙
b. Viscous Friction (Dynamic Friction) throughout the Drive
system
𝑇𝑑𝑓 = 𝑏�̇�
So Mechanical Differential Equation:
∑ 𝑇 = 𝐽�̈�
𝑇𝑚 − 𝑇𝑙 − 𝑇𝑐𝑜𝑢 − 𝑏�̇� = 𝐽�̈�
Taking Laplace Transform:
𝑇𝑚(𝑠) − 𝑇𝑙 − 𝑇𝑐𝑜𝑢 − 𝑏𝑠𝜃(𝑠) = 𝐽𝑠2𝜃(𝑠)
Angular Position Transfer Function:
𝜃
𝑇𝑚 − 𝑇𝑐𝑜𝑢 − 𝐹𝑡1𝑟𝑤𝑖𝑛𝑑𝑒𝑟
=1
𝐽𝑠2 + 𝑏𝑠
𝐽: is variable as winding Cylinder mass increases as winding goes on
its calculations is at the end of paper

Web Material Model
The purpose in modelling the web material is to find an expression for the tension force
development in the web material located between the winders. This requires a physical
interpretation on how stress arises in the web material and how the stress is related to the
winders tangential velocities 𝑉𝑜 and 𝑉1 .
In the following the Voigt model is used to explain arising stress and with the before
mentioned assumptions, control volume analysis and continuum mechanics it is shown how
the stresses are related to 𝑉𝑜 and 𝑉1 .
Voigt Model:
The Voigt model consists of a viscous damper and an elastic spring in parallel as shown
With this model the Stress on the material 𝜎 =𝐹𝑡
𝐴 is expressed as follows
𝜎 =𝐹𝑡
𝐴= 𝐸𝜀 + 𝐶𝜀̇
Where
𝜎:Stress on web material
𝐸: material young’s modulus of elasticity
𝐴:Material Cross Section area A=material width *material thickness
𝜀:Strain Due to Tension force 𝜀 =∆𝐿
𝐿 (Deformed length over normal length)
𝐹𝑡:Tension Force over material
Taking Laplace Transform we get 𝜀 =𝐹𝑡
𝐴𝐸+𝐴𝐶𝑠 (1)

Mass Continuity Definition:
Mass of material doesn’t change as the material is Stretched
𝜌𝐴𝐿 = 𝜌𝐴𝑠𝐿𝑠
Where
A: Normal Area of material
L: Normal length of material
𝐿𝑠:Stretched Length of material
𝐴𝑠:Stretched Cross sectional area
As Density is assumed constant ∴ 𝐴𝐿 = 𝐴𝑠𝐿𝑠 (2)
From Strain Definition 𝜀 =∆𝐿
𝐿=
𝐿𝑠−𝐿
𝐿=
𝐿𝑠
𝐿− 1 (3)
From (2) and (1) 𝐴𝑠 =𝐴
(𝜀+1) (3)
Since 𝜀 ≪ 1 equation (3) can be expressed as
𝐴𝑠 = 𝐴(1 − 𝜀) (4)

Mass Conservation Law:
The definition of mass conservation states that the change in mass of the control
volume equals the difference between the mass entering and exiting the control
volume.
𝑑
𝑑𝑡𝜌𝐴𝐿 = 𝜌𝐴𝑜𝑉𝑜 − 𝜌𝐴1𝑉1
In our case and since density constant 𝑑
𝑑𝑡𝐴𝐿 = 𝐴𝑠𝑜𝑉𝑜 − 𝐴𝑠1𝑉1
From equation (4) we get
𝑑
𝑑𝑡𝐴(1 − 𝜀1)𝐿 = 𝐴𝑜(1 − 𝜀𝑜)𝑉𝑜 − 𝐴1(1 − 𝜀1)𝑉1
As area is assumed uniform over all machine
∴𝑑
𝑑𝑡(1 − 𝜀1)𝐿 = (1 − 𝜀𝑜)𝑉𝑜 − (1 − 𝜀1)𝑉1 (5)

Since the Length of web is influenced only by the Dancer
Displacement (assumption 10)
Dancer Displacement affects web length from both sides
∴ 𝐿 = 𝐿𝑐 − 2𝑑
Where: 𝐿𝑐:Constant Length of web.
𝑑 : Dancer Displacement.
Then equation (5)
𝑑
𝑑𝑡(1 − 𝜀1)(𝐿𝑐 − 2𝑑) = (1 − 𝜀𝑜)𝑉𝑜 − (1 − 𝜀1)𝑉1
By differentiating and simplifying we get
(𝐿𝑐 − 2𝑑). 𝜀1̇ = 𝑉1−𝑉𝑜 − 2𝑉𝑑 + 𝑉𝑜𝜀𝑜 − (𝑉1 − 2𝑉𝑑)𝜀1
By taking Laplace Transform
(𝐿𝑐 − 2𝑑). 𝑠𝜀1 = 𝑉1−𝑉𝑜 − 2𝑉𝑑 + 𝑉𝑜𝜀𝑜 − (𝑉1 − 2𝑉𝑑)𝜀1 (6)
From transfer function (1) into (6) we get equation (7)
𝐹𝑡1 (𝑠 +𝑉1 − 2𝑉𝑑
𝐿𝑐 + 2𝑑) =
𝐴1 𝐸 + 𝐴1 𝐶𝑠
𝐿𝑐 − 2𝑑(−𝑉𝑜 + 𝑉1 − 2𝑉𝑑 ) +
𝑉1𝐹𝑡𝑜
𝐿𝑐 − 2𝑑.𝐴1
𝐴2

From assumption 6, 7 and 8
Dancer displacement is negligible to total web length between winder and
unwinder
Dancer speed is negligible relative to winder and unwinder relative velocities
Material is stiff therefore 𝑉𝑜≈𝑉1
Therefor 𝐿𝑛≈𝐿𝑐 − 2𝑑 and 𝑉𝑜≈𝑉1 − 2𝑉𝑑 (8)
𝐿𝑛: Approximate web length between winder and unwinder
Substituting in equation (7)
𝐹𝑡1 (𝑠 +𝑉𝑜
𝐿𝑛
) =𝐴1 𝐸 + 𝐴1 𝐶𝑠
𝐿𝑛
(−𝑉𝑜 + 𝑉1 − 2𝑉𝑑 ) +𝑉1 𝐹𝑡𝑜
𝐿𝑛
.𝐴1
𝐴2
The Term 𝑉1𝐹𝑡𝑜
𝐿𝑛.
𝐴1
𝐴2 is constant due to assumptions 1, 2 and 9 and it
represents the initial Tension force.
Finally we get the transfer function of tension force from inputs (paper Linear
velocities and dancer velocity)
𝐹𝑡1
𝑉1 − 𝑉𝑜 − 2𝑉𝑑=
𝐴𝐿𝑛
(𝐶𝑠 + 𝐸)
𝑠 +𝑉𝑜𝐿𝑛

Dancer Mathematical Model
From Newton’s Second law of motion
∑ 𝐹𝑒𝑥𝑡𝑒𝑟𝑛𝑎𝑙 = 𝑀𝑎
By deriving equation and taking Laplace Transform
𝐹𝑡𝑜 + 𝐹𝑡1 − 𝑀𝑑 . 𝑔 = (𝑀𝑑𝑠2 + 𝐶𝑑𝑠 + 𝐾𝑑)𝑑
Where
𝑀𝑑: Dancer mass
𝐶𝑑: Dancer damping coefficient
𝐾𝑑:Spring Stiffness
𝑑:Dancer Dsiplacment
Dancer position Transfer function 𝑑
𝐹𝑡1+𝐹𝑡𝑜−𝑀𝑑 .𝑔=
1
𝑀𝑑 𝑠2+𝐶𝑑𝑠+𝐾𝑑
𝐹𝑡1 𝐹𝑡𝑜
𝑀𝑑 . 𝑔

Complete model Summary:
Stepper Motor:
𝑉𝑎 = 𝑅𝑎𝑖𝑎 + 𝐿𝑎
𝑑𝑖𝑎
𝑑𝑡+ 𝑒𝑎
𝑒𝑎 = −𝐾𝑚�̇� sin(𝑁𝑟 𝜃)
𝑇𝑚 = −𝐾𝑚 (𝑖𝑎 −𝑒𝑎
𝑅𝑚) sin(𝑁𝑟𝜃) + 𝐾𝑚 (𝑖𝑏 −
𝑒𝑏
𝑅𝑚) cos(𝑁𝑟𝜃)
Dc motor armature controlled:
𝑇𝑚(𝑠)
𝑉𝑎(𝑠) − 𝐾𝑏𝑒𝑚𝑓�̇�(𝑠)=
𝐾𝑚
𝑅𝑎 + 𝑠𝐿𝑎
Dc motor Field controlled:
𝑇𝑚(𝑠)
𝑉𝑓 (𝑠)=
𝐾𝑚
𝑅𝑓 + 𝑠𝐿𝑓
Mechanical Transfer Function: 𝜃
𝑇𝑚−𝑇𝑐𝑜𝑢−𝐹𝑡1𝑟𝑤𝑖𝑛𝑑𝑒𝑟=
1
𝐽𝑠2+𝑏𝑠
Material Transfer Function: 𝐹𝑡1
𝑉1−𝑉𝑜−2𝑉𝑑=
𝐴
𝐿𝑛(𝐶𝑠+𝐸)
𝑠+𝑉𝑜𝐿𝑛
Dancer Transfer function:𝑑
𝐹𝑡1+𝐹𝑡𝑜−𝑀𝑑.𝑔=
1
𝑀𝑑 𝑠2+𝐶𝑑 𝑠+𝐾𝑑

Calculation of varying moment of inertia:
Length of winded material:
𝐿𝑤𝑖𝑛𝑑𝑒𝑑 = ∫ 𝑉1𝑑𝑡
Radius of Winder Cylinder:
𝑟𝑤𝑖𝑛𝑑𝑒𝑟 = √𝐿𝑤𝑖𝑛𝑑𝑒𝑑 . 𝑡
𝜋+ 𝑟𝑐𝑜𝑟𝑒
2
Material Mass:
𝑀 = 𝑀𝑣. 𝜋. 𝑤(𝑟𝑤𝑖𝑛𝑑𝑒𝑟2 − 𝑟𝑐𝑜𝑟𝑒
2)
𝑀𝑣: Material mass per unit volume
𝑟𝑐𝑜𝑟𝑒: Winder Cylinder Core radius
Variable material Moment of inertia:
𝐽𝑤 =1
2𝑀(𝑟𝑤𝑖𝑛𝑑𝑒𝑟
2 + 𝑟𝑐𝑜𝑟𝑒2)
Total Drive moment of inertia:
𝐽 = 𝐽𝑤 + 𝐽𝑐
𝐽𝑐 : Winder Cylinder Core Moment of inertia