Embed Size (px)
Citation preview
Agent-Based Modeling: More Examples
PSC 120
Jeff Schank

Ovarian-Cycle Synchrony• Does ovarian-cycle synchrony exist in
mammals?
• The problem of cycle variability
• Ovarian cycles and female mate choice
– The cost of synchrony

Synchrony?• Studies have reported synchrony in
– Women– Norway rats– Golden hamsters– Golden lion tamarins– Chimpanzees
• All are fundamentally flawed and more recent studies have found no effects

Original Results (1971)

Does Menstrual Synchrony Exist?

Does Menstrual Synchrony Exist? Continued…

The Cost of Synchrony• There are two types of fitness costs for
synchronized females– Male quality– Mating opportunities
• To explore these costs, I built an ABM, based on J. B. Calhoun’s study: The Ecology and Sociology of The Norway Rat

Calhoun’s Rats ABM• Aims and Design
– Ecologically realistic– Based on data– 5 to 10 reproductive females at a given
time– 61 adult males (7 high, 12 medium, 42 low)– Movement is determined by “collapsing”
preferences into a local probability space surrounding a model rat

Two views of the Pen

The Trails Map
ABM Model

Syn
chro
ny

Synchrony by Chance

Syn
chro
ny D
istr
ibut
ions

Male Quality & Synchrony

Matings and Synchrony

Male Quality & Cycle Length
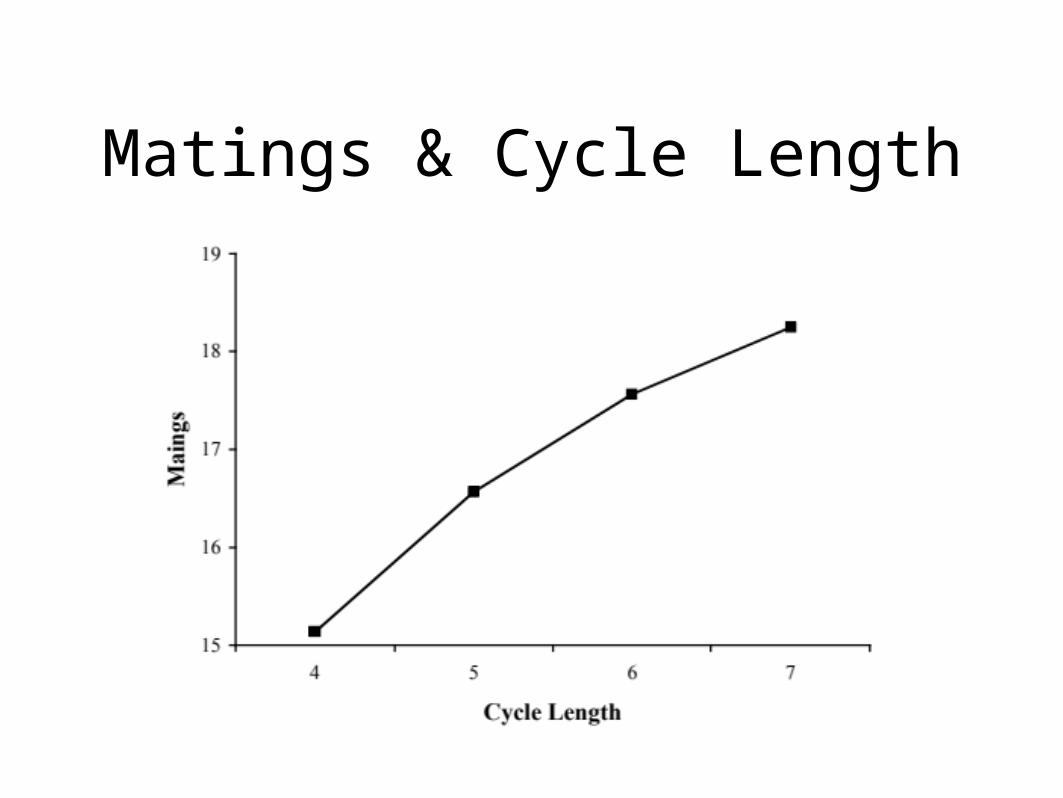
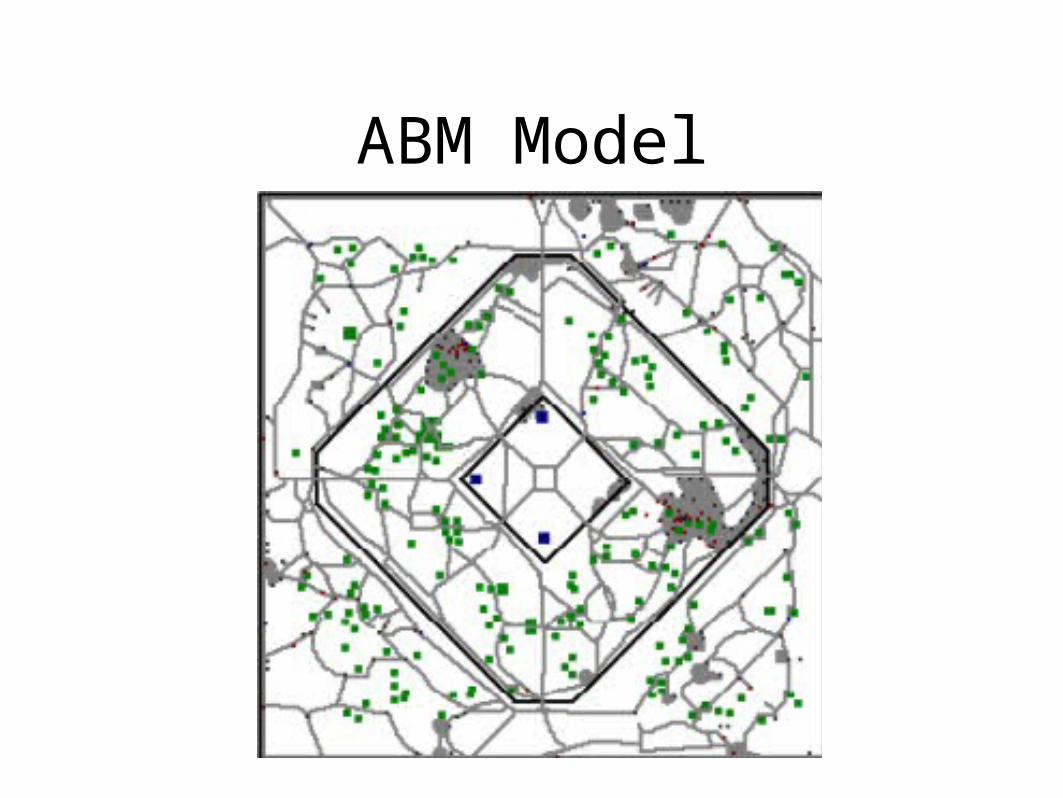
Matings & Cycle Length

Conclusions
• Ovarian cycles may have evolved to facilitate female mate choice
• Synchrony has fitness costs
• Cycle variability may have fitness benefits in promiscuous mating systems

The Development of Locomotion
• How do animals do what they do?• How do we answer this question?
• Start simple and work to the complex
• If we want to understand how something works in space and time, it is often a good idea to build it or something like it.
• We cannot just build animals at different stages of development, but we can build models of them, which may help us understand them better (i.e., simulation, robotic)
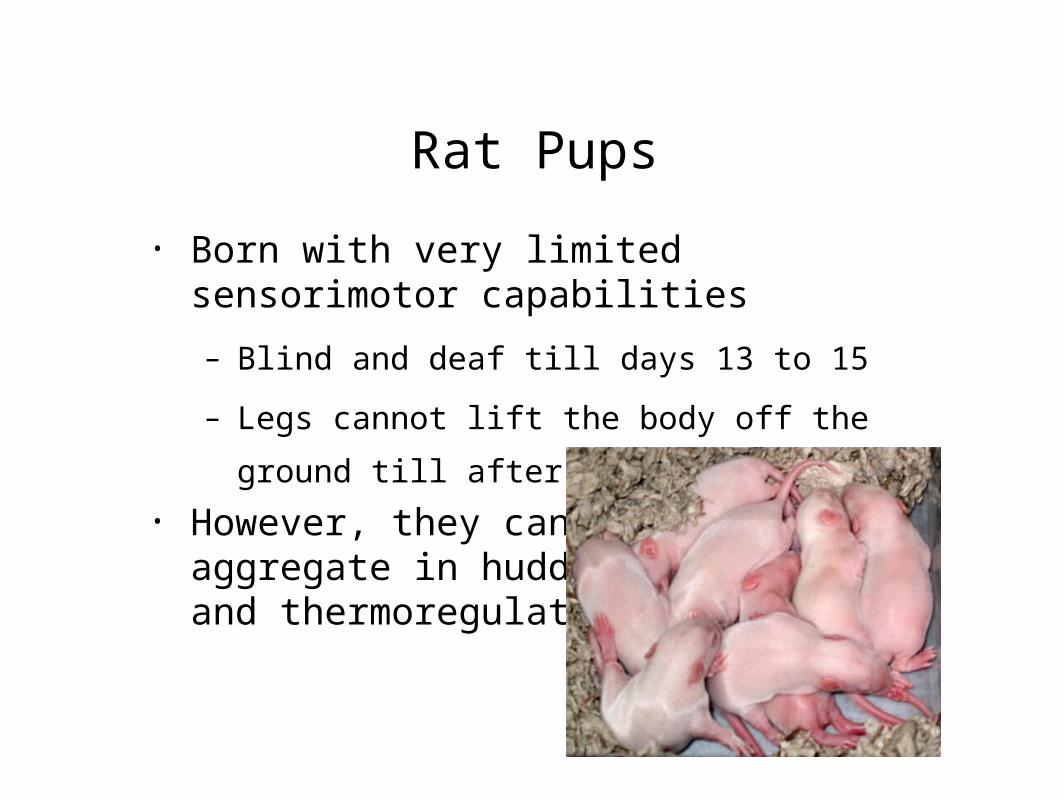
Rat Pups
• Born with very limited sensorimotor capabilities
– Blind and deaf till days 13 to 15
– Legs cannot lift the body off the ground till after
day 10
• However, they can aggregate in huddles and thermoregulate
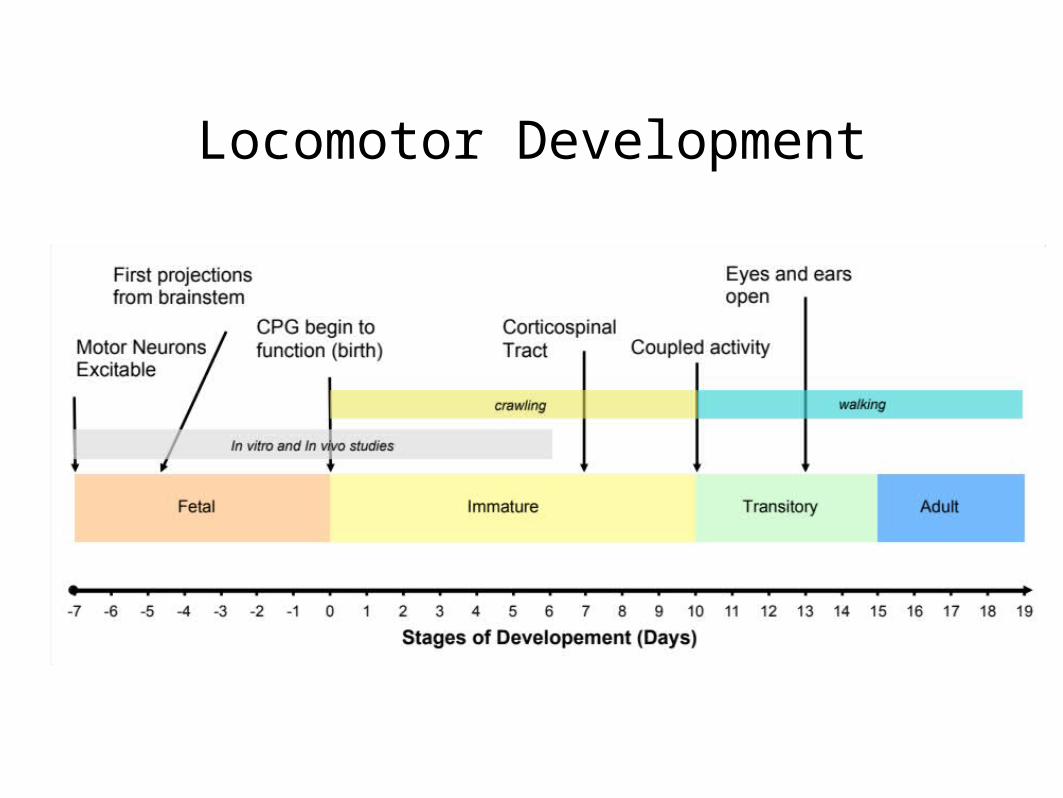
Locomotor Development

Behavior in a Temperature Controlled Arena: A Simple Paradigm

Metrics
• Basic metric: tip of nosebase of tail location
• Derived metrics– Activity– Object Contact– Speed – Aggregation– Conditional Probabilities
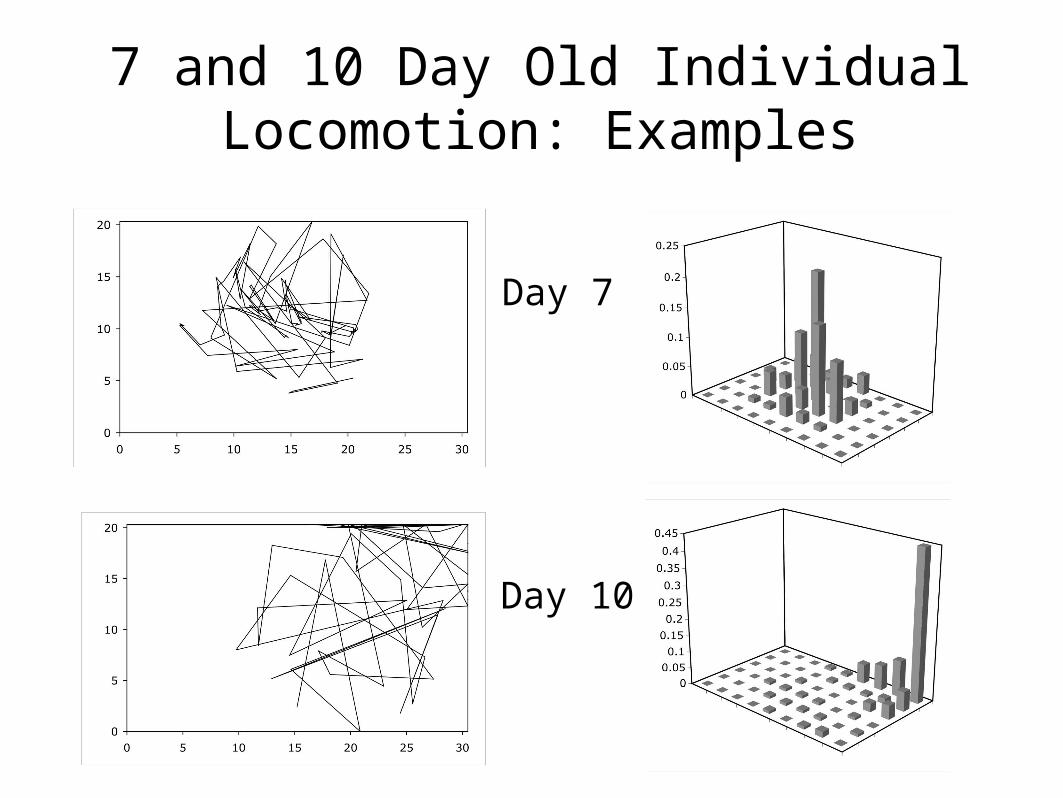
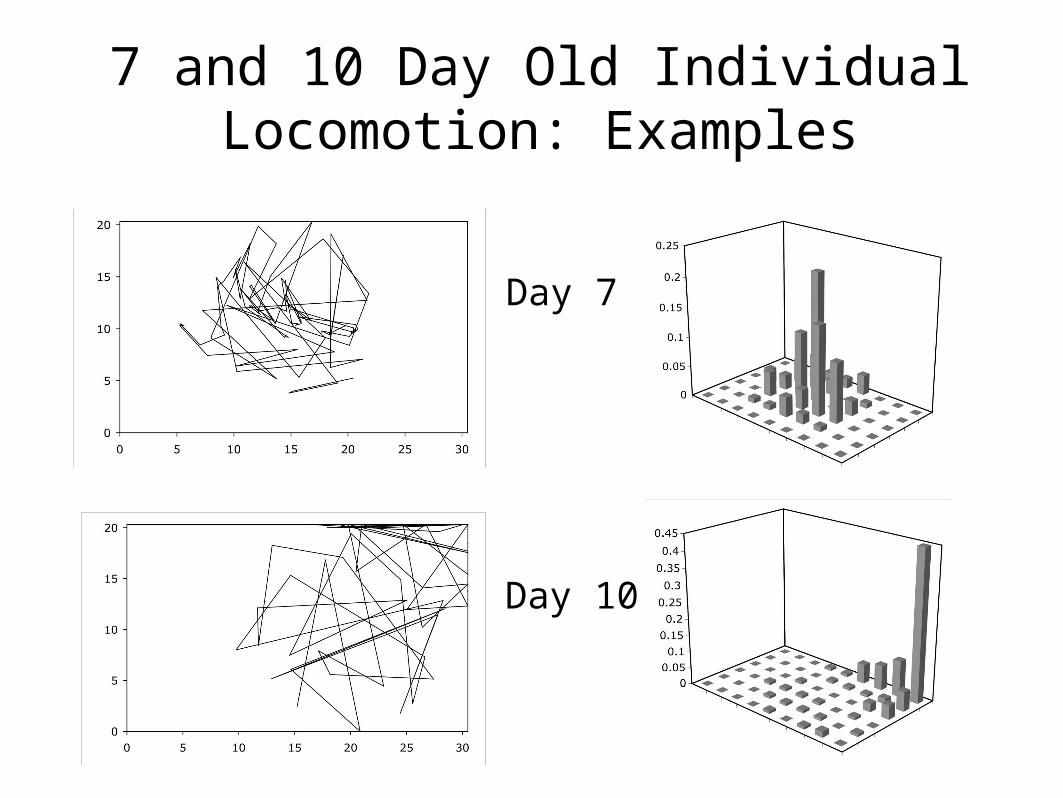
7 and 10 Day Old Individual Locomotion: Examples
Day 7
Day 10

7 and 10 Day Old Individual & Group Locomotion
Individual
Group
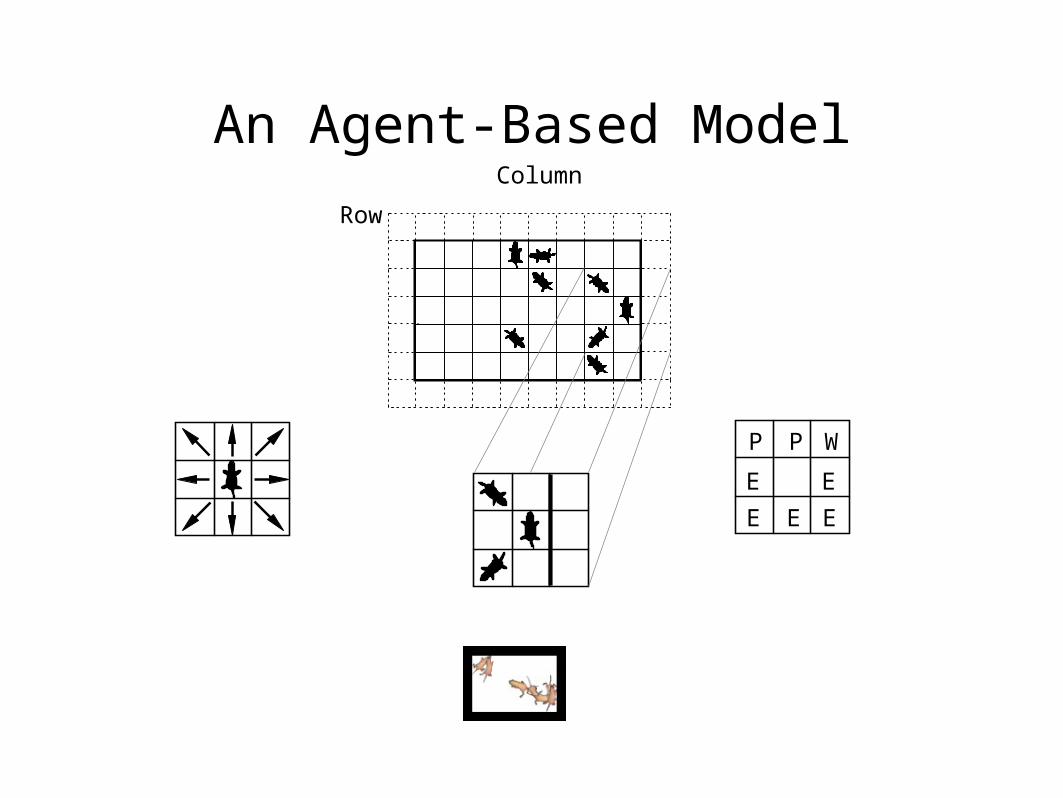
An Agent-Based Model
Row
Column
P P W
E E
E E E

Whole-Body Locomotion Kinematics
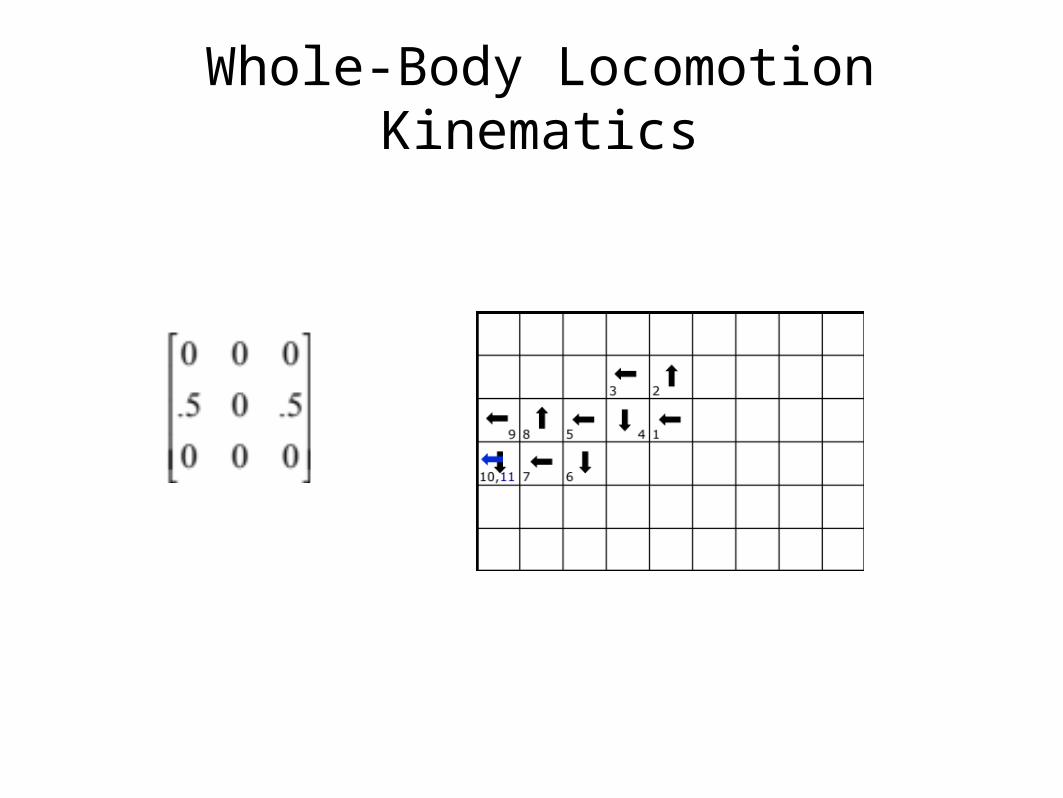
Whole-Body Locomotion Kinematics

Genetic Algorithms
• Arrange the parameters of the into a “chromosome”
• Create a population of models
• Perform mutation and crossover on pairs of models
• Run a number of simulations and choose the parameters that best fit the data

Locomotion Kinematic Results
Day 7 Day 10
Individual
Group

7 and 10 Day Subgroup Formation
Day 7 Day 10
7 and 10 Day Old Individual Locomotion: Examples
Day 7
Day 10

Model Examples
Day 7
Day 10