Embed Size (px)
Citation preview

AESWARM
03.06.11
Mert DoğarHazar İlhanDünya Değirmenci

Software Framework
Four pieces of software: GUI/ controller Simulator SOM (multiple instance) SOM Launcher (assistant to simulator)
Connect to each other through TCP/IP
03.06.11

Software Framework
03.06.11

Environment vs Robot
Environment in reality is demanding; Non-deterministic Dynamic Continous
We utilize 6-way proximity data Ambient light intensity Infared communication to handle robot’s
states03.06.11

The Robots
03.06.11
• Two DC motors on the sides, one free wheel at the rear
• Chassis and wheels made of white polyethylene
• Run on Nokia batteries, rechargeable
• Wheels partially clad with o-rings for sufficient grip

The Robots
03.06.11
Power ConsumptionMain consumers of power on the robot are
• dsPic33: 300mA absolute maximum (average around 100mA)
• DC motors: 250mA measured maximum (normally around 80-100mA)
• IR emitters: 100mA absolute maximum

The Robots
Current Abilites:
Able to perform proximity analysis from infrared density Working with outputs derived
from SOMs Can select source SOM
according to ambient
03.06.11

The Environments
03.06.11
• Three constraints while designing the environments:
– Corridor width, must not cause congestion
– Lines of sight, must create different conditions of communication
– Charger placement, must allow various scenarios
• As such, we created three different environments for the robots to live in.
– Each fit in an area of 110x97cm
– Wall height: 13cm

Future work
2 microphones to capture auditory data 2D localization techniques on a microphone
array A CMOS camera to capture visual data
Image processing and pattern recognition techniques
03.06.11
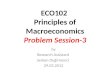
IR emitter
IR emitter
IR sensors
IR emitterIR emitter
IR sensor
Ambient light sensor
Voltage divider for battery level
Microphone inputs
CMOS Camera

Extra Memory
All robots contain a 2gb non-volatile memory Used for logging Contains all soms(i.e. genes) available to a
robot Contains starting training vectors
Training vectors will be overwritten when passing a generation
File format is FAT16
03.06.11

Self-Charging
We want our swarm units to automatically detect low power and start search for charging area.
This will be carried out by following the nearby walls Listening to communication buffer if anyone who found the charging area is yelling out the
location.
03.06.11
Charging area

Adaptive resonance theory (ART2)
Reduced boltzmann machine used with contrastive divergence
Back propagation algorithm
Self-Organizing Maps by Kohonen
03.06.11

Self-Organizing Maps
Proposed by Kohonen Commonly used for data
classification Unsupervised learning, noise tolerant
Maps an arbitrary N dimentions of data to commonly 1 or 2 dimensions Data clustering Output selection
03.06.11

03.06.11
Best-Matching-Unit
Behavioral State Machine
Functional Diagram

References
Kohonen, T. (1997). Self-Organizing Maps, Second Edition. Heidelberg, Germany: Springer- Verlag.
03.06.11




![ñX^fvf( of u& ]lºoº€¦ · cümlesinde eş sesli sözcük yoktur. 4. “Birlikten kuvvet doğar” cümlesindeki “kuvvet” söcüğü fizik terimi olarak kul-lanılmıştır](https://img.dokumen.tips/doc/110x75/60dfe824dc4bc95513170f05/xfvf-of-u-lo-cmlesinde-e-sesli-szck-yoktur-4-aoebirlikten.jpg)