Embed Size (px)
Citation preview

Adaptive Optics Model
Anita Enmark
Lund Observatory

Outline
• Adaptive Optics Model• Current Work
Generalization Model Improvment Parallelization

Euro50 Model OverviewSCAO on a NGS
DM3169
Actuators

Adaptive Optics ModelTest Vehicle for AO Design together with ELT
Atmosphere
Controller
ReconstructionWavefront
sensorDeformable
mirror
• SCAO / NGS• Geometrical or Fresnel Propagation• SVD• Various influence functions and geometries• DM1: 2nd order systems for every actuator• Delay/non-linearities from WFS• Geometrical or physical model of SH-WFS

Current Work
• Generalization
• Improved adaptive optics model
• Parallelization

Generalization and improvment
• Adaptive optics model tested for VTT
• Improved model (atmosphere, noise etc)
WFS-lenslet CCD
Tip/Tilt Mirror
Deformable Mirror
LP-filter
Reconstruction and command
Discrete PID regulator
Pupil Plane
Photon noise
Source OPD
Actuator diff. commands
Actuator diff. commandDiscrete PID regulatorLP-filter
Actuator command
Actuator command
AD-Converter

Movie of VTT model with modes 1,2 (tip/tilt) and 30-35 set to
zero

Parallelization
Simulation environment for first order model Beowulf cluster with Matlab+MatlabWS
Memory capacity limiting factorFull matrix with DM influence function 6GBfor 3169 actuators64 bit Matlab needed– more primary memoryParts of code too slowSimple first order model takes many days/secNetwork too slow
Currently evaluating other simulation environments
Cluster – LUNARC, Lund
Shared memory - Galway, Ireland

ODE Multirate Solvers for Systems with Mixed Dynamics
1 million State Variables
Fast SubsystemSlow Subsystem
• Modern work on multi-rate solvers (eg. Anne Kværnø et al)• Andrus: Mixed 4th order Runge-Kutta• Simpler multirate solvers with extra/interpolation• Execution time reduction 5-10x
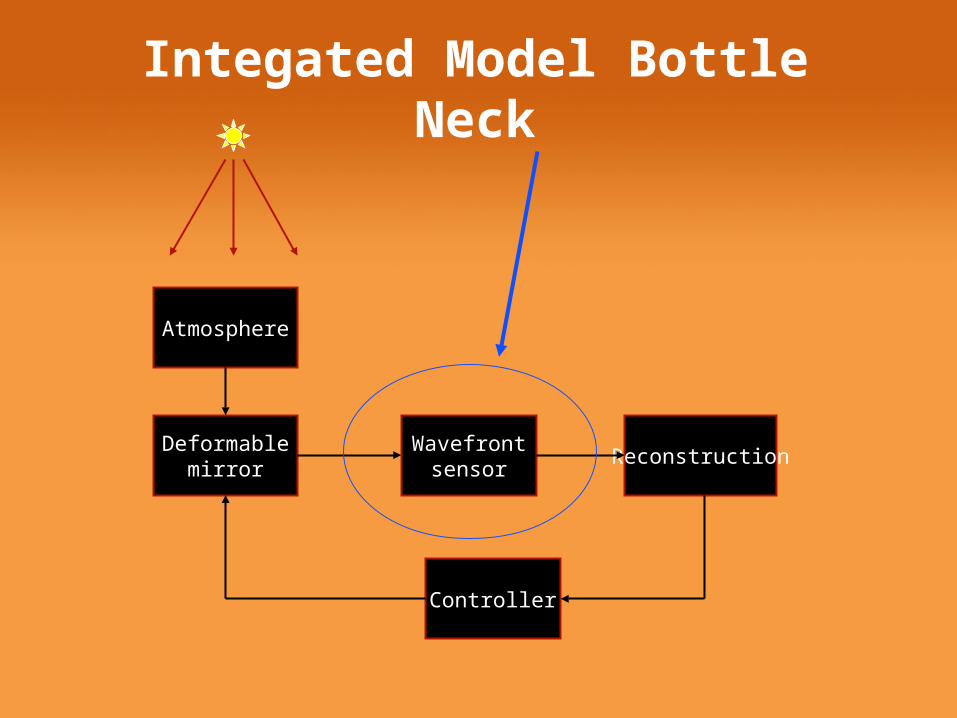
Integated Model Bottle Neck
Atmosphere
Controller
ReconstructionWavefront
sensorDeformable
mirror

Main drivers for execution time:
• One image for each subaperture -> For every subaperture: exponential and 2D IFFT
• Must give FOV as close to nominal as possible -> interpolation of wavefront
Shack-Hartman Wavefont Sensor Model

),( yx
),(2
exp),(),( 1 yxiyxuFI yx
),( yx1F
Every subaperture is propagated to the image plane with Fraunhofer propagation. The image of the subaperture wavefront in angular coordinates is then
where u(x,y) is the complex amplitude of the wavefront in the spatial coordinate system (x,y) and is the wavefront phase.
denotes the inverse Fourier transform.
Image formation
2
=> exponential and IFFT
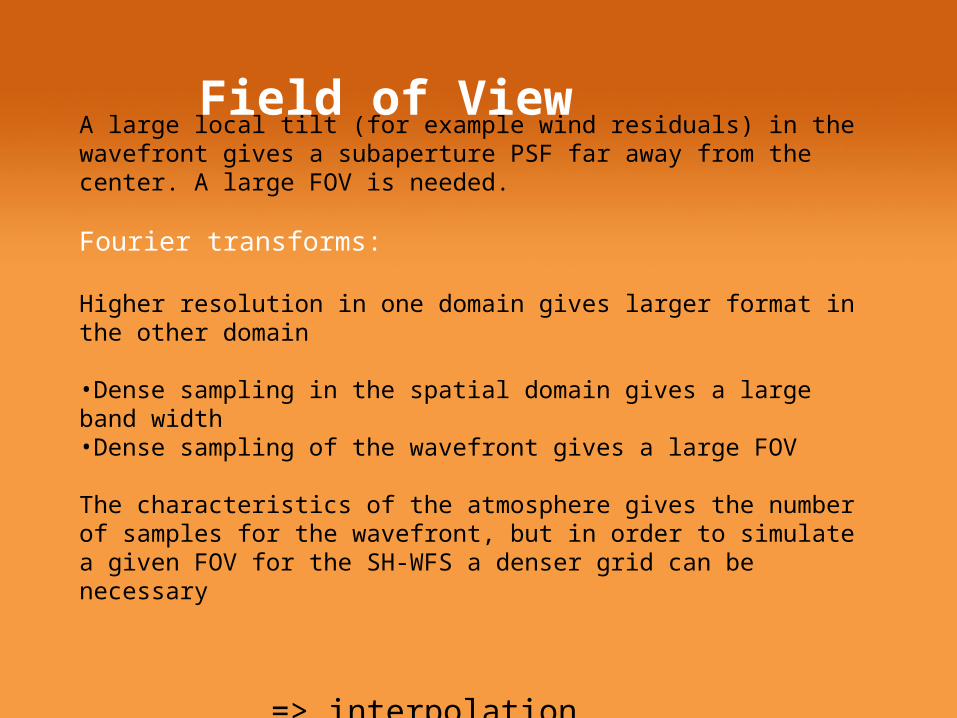
A large local tilt (for example wind residuals) in the wavefront gives a subaperture PSF far away from the center. A large FOV is needed.
Fourier transforms:
Higher resolution in one domain gives larger format in the other domain
•Dense sampling in the spatial domain gives a large band width•Dense sampling of the wavefront gives a large FOV
The characteristics of the atmosphere gives the number of samples for the wavefront, but in order to simulate a given FOV for the SH-WFS a denser grid can be necessary
=> interpolation
Field of View

Good News:Both have outer loops with an independent variable=>Suitable for parallelization.
Bad News:Matlabs parallel computing tools not good for our needs. MatlabWS not ported to shared memory machine. New C-code needed.
More good news:The bottle necks are within the same Matlab subfunction, only a limited part of the model must be coded in C. This gives fast execution, but keeps good structure.
Model groves with more sensors – can be parallelized
Impact on AO-model
0.5 1 1.5 2 2.5 3 3.5 4 4.5
0.5
1
1.5
2
2.5
3
3.5
4
4.50.5 1 1.5 2 2.5 3 3.5 4 4.5
0.5
1
1.5
2
2.5
3
3.5
4
4.5
50 100 150 200
50
100
150
200
Mex file result
50 100 150 200
50
100
150
200
Matlab file result
50 100 150 200
50
100
150
200
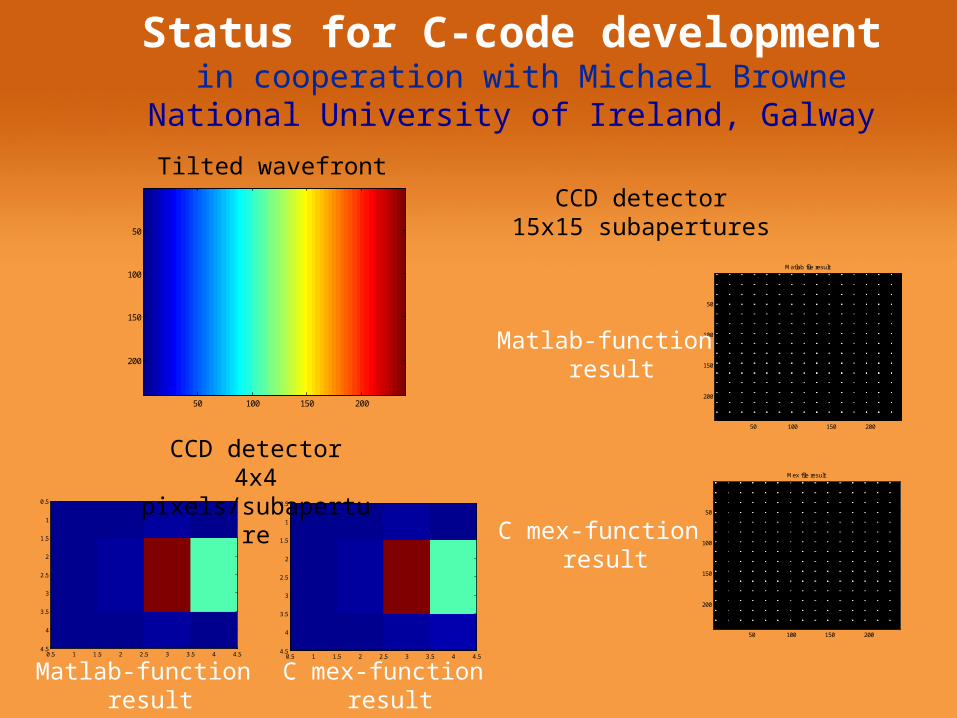
Tilted wavefront
CCD detector4x4 pixels/subaperture
C mex-function result
Matlab-function result
C mex-function result
Matlab-function result
CCD detector15x15 subapertures
Status for C-code development in cooperation with Michael Browne
National University of Ireland, Galway

Test results for one call to WFS
Matlab on one CPU machine ~ 100 sec
Sequential C-code on the same machine ~ 14 sec
Sequential C-code on Itanium machine ~ 4 sec
Expected for multi-processor Itanium ~ 0.5 sec

Integrated Modeling
Conclusions
• A full Euro50 model with AO in place
• Generalization work in progress
• AO model improved
• Parallelization in progress – faster network and more memory needed – under test
• First tests promising


Full first order model simulation
Atmosphere correction