Embed Size (px)
Citation preview

Change the color of the line of the text box to ‘No line’ before printing:
Right click on the edge of the text box
Select ‘Format text box’
Select the tab ‘Colors and Lines’
Line: Color: ‘No Line’
Adaptive Ensemble Models of Extreme Learning Machines for Time Series Prediction
Mark van Heeswijk
July 2009

ii

Abstract
In time series prediction, one does often not know the properties of the underlying system
generating the time series. For example, is it a closed system that is generating the time
series or are there any external factors influencing the system? As a result of this, you
often do not know beforehand whether a time series is stationary or nonstationary, and in
the ideal case you do not want to make any assumptions about this.
Therefore, if one wants to do time series prediction on such a system it would be nice if a
model exists that is able to perform well on both nonstationary and stationary time series,
and that the model adapts itself to the environment in which it is applied.
In this thesis, we will experimentally investigate a method that hopefully has this property.
We will look at the application of adaptive ensemble models of Extreme Learning Machines
(ELMs) to the problem of one-step ahead prediction in (non)stationary time series.
In the experiments, we verify that the model works on a stationary time series, the Santa
Fe Laser Data time series. Furthermore, we test the adaptivity of the ensemble model on
a nonstationary time series, the Quebec Births time series. We show that the adaptive
ensemble model can achieve a test error comparable to or better than a state-of-the-art
method like LS-SVM, while at the same time, it remains adaptive. Additionally, the
adaptive ensemble model has low computational cost.
keywords: time series prediction, sliding window, extreme learning machine, ensemble
models, nonstationarity, adaptivity
iii

iv

Acknowledgements
This thesis has been made in Information and Computer Science Laboratory in the Adap-
tive Informatics Research Centre at the Helsinki University of Technology.
What started as a project in the Computational Cognitive Systems Group, developed into
a project in cooperation with the Time Series Prediction and Chemoinformatics Group.
Along the way, I have been very lucky to have met so many wonderful people in both
these research groups and in the lab in general. It has been great to work with all of you.
Thanks for all the nice trips, all the interesting (often late-night) discussions, and the nice
and relaxed work atmosphere in general in the lab. Combined with the good facilities at
the lab, this makes it an enjoyable and great place to work.
In particular, I would like to thank Prof. Erkki Oja for his supervision of my thesis, and
Docent Amaury Lendasse and Docent Timo Honkela for their excellent instruction, clear
guidance and mentoring, and unlimited supply of wisdom whenever needed. It has been
a pleasure and great inspiration to work with all of them. Many thanks also to Tiina
Lindh-Knuutila, who kept me focused and on-topic, whenever I could not resist asking
too many questions at once. Special thanks go out to Antti Sorjamaa, who has been a
great help in many things, ranging from LATEX support, to finding the way in the Finnish
system, to apartment hunting.
Many thanks of course go to all the people at my home university, the Eindhoven University
of Technology. First of all, I want to thank prof. dr. Peter Hilbers for his flexible
supervision, and help during my thesis. Of course, also many thanks to all the people that
helped me at one point or another during the arrangements for my thesis and my studies
in general, and helped me to get to where I am today.
Last but not least, many thanks to all my friends, and of course the wonderful people from
BEST that introduced me to Finland in the first place. It has been a great adventure so
far and I am eagerly looking forward to the years to come. Finally, love and thanks to my
parents, for always supporting me and believing in me.
Espoo July 20th 2009
Mark van Heeswijk
v

vi

Contents
Abstract iii
Acknowledgements v
Abbreviations and Notations ix
1 Introduction 1
2 Theory 3
2.1 Time Series Prediction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.2 Time Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.3 Time Series Prediction . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Functional Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 Model Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3.1 Example: Influence of Model Complexity . . . . . . . . . . . . . . . 7
2.3.2 Model Selection Methods . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4 Ensemble Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.4.2 Average of Models . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4.3 Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.5 Extreme Learning Machine . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Adaptive Ensemble Models 15
3.1 Adaptive Ensemble Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Adaptive Ensemble Model of ELMs . . . . . . . . . . . . . . . . . . . . . . . 16
3.2.1 Initialization of the Ensemble Model using PRESS Residuals . . . . 16
3.2.2 Adaptation of the Ensemble . . . . . . . . . . . . . . . . . . . . . . . 17
3.2.3 Adaptation of the Models . . . . . . . . . . . . . . . . . . . . . . . . 18
4 Experiments 21
vii

4.1 Time Series . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1.1 Motivation for the Choice of Time Series . . . . . . . . . . . . . . . 22
4.1.2 Stationary Time Series - Santa Fe Laser Data . . . . . . . . . . . . . 22
4.1.3 Nonstationary Time Series - Quebec Births . . . . . . . . . . . . . . 22
4.2 Experiments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2.1 Experiment 1: Adaptive Ensembles of ELMs . . . . . . . . . . . . . 25
4.2.2 Experiment 2a: Sliding Window Retraining . . . . . . . . . . . . . . 29
4.2.3 Experiment 2b: Growing Window Retraining . . . . . . . . . . . . . 31
4.2.4 Experiment 3: Initialization based on Leave-One-Out Output . . . . 33
4.2.5 Experiment 4: Running Times and Least Squares Support Vector
Machine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5 Discussion 39
5.1 Effect of Number of Models . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.2 Effect of Learning Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.3 Effect of the Leave-one-out Weight Initialization . . . . . . . . . . . . . . . 40
5.4 LS-SVM and Performance Considerations . . . . . . . . . . . . . . . . . . . 41
5.4.1 Comparing models . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.4.2 Comparison on Laser Time Series . . . . . . . . . . . . . . . . . . . . 42
5.4.3 Comparison on Quebec Time Series . . . . . . . . . . . . . . . . . . 43
6 Future Work 45
6.1 Explore Links with Other Fields . . . . . . . . . . . . . . . . . . . . . . . . 45
6.2 Improving on Input Selection . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.3 Improving Individual Models . . . . . . . . . . . . . . . . . . . . . . . . . . 45
6.4 Improving Ensemble Model . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.5 Other Degrees of Adaptivity . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
6.6 Parallel implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
6.7 GPU Computing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7 Conclusions 49
8 Bibliography 51
8.1 References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
A Santa Fe Laser Data Errors 55
B Quebec Birth Data Errors 57
viii

Abbreviations and Notations
ELM Extreme Learning Machine
i.i.d. independent and identically distributed
MSE Mean Square Error
LS-SVM Least Squares Support Vector Machine
d the dimension of the input samples
M the number of samples
m the number of models
N the number of hidden neurons
x(t) input value x, at time t
y(t) true value y, at time t
(xi, yi) training sample consisting of input xi and output yi
xi 1 × d vector of input values
yi output value
X M × d matrix of inputs
Y M × 1 matrix of outputs
yi(t) approximated output y by model i, at time t
yens(t) approximated output y by ensemble, at time t
ǫi(t) error of model i, at time t
E[x] expectation of x
wi the input weights to the ith neuron in the hidden layer
bi the biases of the ith neuron in the hidden layer
H hidden layer output matrix
H† Pseudo-inverse of matrix H (i.e. (HTH)−1HT )
βi the output weights
ix

x
List of Figures
2.1 A schematic overview of a system . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 A schematic overview of the relation between a model and the system it is
trying to model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.3 Output of various models (red line), trained on a number of points (blue
dots) of the underlying function (green line) . . . . . . . . . . . . . . . . . . 8
2.4 The effect of model the number of hidden neurons on test error . . . . . . . 9
2.5 A schematic overview of how models can be combined in an ensemble . . . 11
2.6 A schematic overview of an ELM . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1 A schematic overview of how ELMs can be combined in an ensemble . . . . 16
3.2 Plots showing part of the ensemble weights wi adapting over time during
sequential prediction on (a) Laser time series and (b) Quebec Births time
series (learning rate=0.1, number of models=10) . . . . . . . . . . . . . . . 18
4.1 The Santa Fe Laser Data time series (first 1000 values) . . . . . . . . . . . . 23
4.2 The Santa Fe Laser Data time series (complete) . . . . . . . . . . . . . . . . 23
4.3 The Quebec Births time series (first 1000 values) . . . . . . . . . . . . . . . 24
4.4 The Quebec Births time series (complete) . . . . . . . . . . . . . . . . . . . 24
4.5 The result of a single run: a measurement of the mean square test error
over all parameter combinations . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.6 MSEtest of ensemble on Laser time series as a function of (a) the number
of models and (b) the learning rate, with individual runs (gray lines), the
mean of all runs (black line), and the standard deviation on all runs (error
bars). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.7 Distribution of MSEtest of 100 individual models on Laser time series. . . . 27
4.8 MSEtest of ensemble on Quebec time series as a function of (a) the number
of models and (b) the learning rate, with individual runs (gray lines), the
mean of all runs (black line), and the standard deviation on all runs (error
bars). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.9 Distribution of MSEtest of 100 individual models on Quebec time series. . . 28
4.10 MSEtest of ensemble (retrained on sliding window) on Laser time series as
a function of (a) the number of models and (b) the learning rate, with
individual runs (gray lines), the mean of all runs (black line), and the
standard deviation on all runs (error bars). . . . . . . . . . . . . . . . . . . 29
xi
4.11 Distribution of MSEtest of 100 individual models on Laser time series. . . . 29
4.12 MSEtest of ensemble (retrained on sliding window) on Quebec time series
as a function of (a) the number of models and (b) the learning rate, with
individual runs (gray lines), the mean of all runs (black line), and the
standard deviation on all runs (error bars). . . . . . . . . . . . . . . . . . . 30
4.13 Distribution of MSEtest of 100 individual models on Quebec time series. . . 30
4.14 MSEtest of ensemble (retrained on sliding window) on Laser time series as
a function of (a) the number of models and (b) the learning rate, with
individual runs (gray lines), the mean of all runs (black line), and the
standard deviation on all runs (error bars). . . . . . . . . . . . . . . . . . . 31
4.15 Distribution of MSEtest of 100 individual models on Laser time series. . . . 31
4.16 MSEtest of ensemble (retrained on sliding window) on Quebec time series
as a function of (a) the number of models and (b) the learning rate, with
individual runs (gray lines), the mean of all runs (black line), and the
standard deviation on all runs (error bars). . . . . . . . . . . . . . . . . . . 32
4.17 Distribution of MSEtest of 100 individual models on Quebec time series. . . 32
4.18 Comparison of MSEtest on Laser time series for uniform weight initializa-
tion (solid lines) and on leave-one-out initialization (dotted lines) for: no
retraining (blue lines), sliding window retraining (red lines) and growing
window retraining (green lines). . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.19 Comparison of MSEtest on Quebec time series for uniform weight initializa-
tion (solid lines) and on leave-one-out initialization (dotted lines) for: no
retraining (blue lines), sliding window retraining (red lines) and growing
window retraining (green lines). . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.20 Running time of the ensemble on Laser series for varying numbers of models
for uniform initialization (solid lines), LOO initialization (dotted lines), no
retraining (blue lines), sliding window retraining (red lines) and growing
window retraining (green lines). . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.21 Running time of the ensemble on Quebec series for varying numbers of
models for uniform initialization (solid lines), LOO initialization (dotted
lines), no retraining (blue lines), sliding window retraining (red lines) and
growing window retraining (green lines). . . . . . . . . . . . . . . . . . . . . 37
5.1 MSEtest as a function of learning rate for (a) Laser time series and (b)
Quebec time series for 10 models (dashed line) and 100 models (solid line). 40
xii
List of Tables
4.1 Parameters for Experiment 1 . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2 Average time (s) a single model adds to running time of ensemble on Laser 36
4.3 Average time (s) a single model adds to running time of ensemble on Quebec 37
4.4 Parameters used for LS-SVM . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.5 LS-SVM Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
A.1 Average prediction error on Santa Fe Laser Data (learning rate=0.1) . . . . 55
A.2 Average prediction error on Santa Fe Laser Data (learning rate=0.1) . . . . 55
A.3 Average prediction error on Santa Fe Laser Data (#models=100) . . . . . . 56
B.1 Average prediction error on Quebec Births (learning rate=0.1) . . . . . . . 57
B.2 Average prediction error on Quebec Births (learning rate=0.1) . . . . . . . 57
B.3 Average prediction error on Quebec Births (#models=100) . . . . . . . . . 58
xiii

xiv

Chapter 1
Introduction
In many fields one encounters data or measurements which vary in time. Given this data,
one wants to gain insight in the system generating the data and predict how the system
will behave in the future given the data so far. For example, in finance, experts predict
stock exchange courses or stock market indices, and producers of electricity predict the
load of the following day. In all these fields, the common question is how one can analyze
and use the past to predict the future.
In time series prediction, one of the challenges is that one does often not know the prop-
erties of the underlying system generating the time series. For example, we often do not
have complete knowledge about whether the system is a closed system that is generating
the time series and whether or not there are any external factors influencing the system.
As a result of this, we often do not know beforehand whether a time series is stationary
or nonstationary.
Therefore, in the ideal case we do not want to make any assumptions about the stationarity
of the system and it would be nice if the model we use to predict future values of the time
series is able to perform well on both nonstationary and stationary time series and that
the model adapts itself to the environment in which it is applied.
In this thesis, we look at the problem of one-step ahead prediction on both stationary and
nonstationary time series. What this means is that at any time, we would like to predict
the next value in the time series as accurate as possible, using the past values of the time
series. The model we will use for this task is an adaptive ensemble model of a type of
feedforward neural network called Extreme Learning Machines.
With this model, we use various strategies in order to make it adaptive to changes in the
environment it is operating in. First of all, we use a combination of multiple models, each
of which is specialized on part of the state space. We combine these models in an adaptive
way in order to optimize prediction accuracy. Secondly, we look at different strategies to
retraining the models repeatedly on a finite window of past values.
We experimentally investigate the model on both stationary and nonstationary time series,
and analyze the model and the influence of its parameters on both prediction accuracy
and performance.
In the experiments, we verify that the model works on a stationary time series, the Santa
Fe Laser Data time series and achieves good prediction accuracy and performance. We
also test the adaptivity of the ensemble model on a nonstationary time series, the Quebec
Births time series. We show that the adaptive ensemble model can achieve a test error
1

comparable or better to a state-of-the-art method like the Least Squares Support Vector
Machine (LS-SVM), while at the same time, remaining adaptive. Additionally, we show
that it is able to do so at low computational cost.
The organization of the rest of this thesis is as follows. First, in Chapter 2 we discuss the
theory related to the topic of this thesis. In particular time series prediction and its goals,
regression, model selection, ensemble models, and Extreme Learning Machines.
Once an overview of the theory has been given, in Chapter 3 we discuss how the various
parts come together in the ensemble models that are the focus of this thesis. We will
introduce multiple degrees of adaptivity, show how the proposed model can be trained at
little computational cost and in what context it is applied.
In Chapter 4 and 5, we discuss and analyze the experiments which we performed to
investigate the performance of the ensemble model in one-step ahead prediction on the two
different time series. We verify that the model works on a stationary time series, the Santa
Fe Laser Data time series and investigate the adaptivity of the model on the nonstationary
time series, the Quebec Births Data. We will look at the quality of predictions made by
the ensemble model and the LS-SVM, as well as the computational requirements of the
different methods.
We conclude the by giving an overview of promising future research directions and sum-
marize the results of the thesis.
2

Chapter 2
Theory
2.1 Time Series Prediction
2.1.1 Background
In many fields one encounters data or measurements which vary in time. Given this data,
one often want to gain some insight in the underlying system generating the data or predict
future data points given the data so far. This is what time series prediction deals with.
Time series prediction is a challenge in many fields. For example, in finance, experts
predict stock exchange courses or stock market indices; data processing specialists predict
the flow of information on their networks; producers of electricity predict the load of the
following day [1, 2], climatologists want to predict the change in temperature as a result
of CO2 emmissions. In all these fields, the common question is how one can analyze and
use the past to predict the future.
2.1.2 Time Series
A common assumption in the field of time series prediction is that the underlying process
generating the data is not changing over time (i.e. is stationary), and that the data
points generated by the process are independent and identically distributed. A schematic
overview of a system can be found in Figure 2.1.
System
disturbances
u xu x
Figure 2.1: A schematic overview of a system
Here the inputs of the system are denoted by u, the outputs of the system are denoted by
xu. We often do not know xu but only observe a noisy version of the outputs, namely x.
For example, if we would describe the electricity grid and the load on it this way, then all
3

the factors that are influencing the electricity grid (like time of day, season, temperature)
are denoted by u, the load on the electricity grid as xu, and the measurement of it as x.
A series of these measurements makes up a time series, which can be formally defined as
{x(t)}Nt=1, x(t) ∈ R, (2.1)
where t denotes the time. The time step between two consecutive values in a time series
is equal across the entire time series and can range from microseconds to years. In case
both u(t) and x(t) are both part of the time series, then we speak of a time series with
external inputs. In this thesis however, the focus is on time series without external inputs.
2.1.3 Time Series Prediction
Model and System
Now, given past values of a time series, the goal is to predict future values of the time
series. A common way to do this is by considering the system generating the data as
an autoregressive process, and try to build a model that approximates the input-output
relation of that process as good as possible. That is, to see the values of the time series
as a function of previous values and to approximate this function as closely as possible.
The relation between model and process is depicted in Figure 2.2.
System
Model f(x, θ)
disturbances
x yu y
−
y
ǫ
Figure 2.2: A schematic overview of the relation between a model and the system it is
trying to model
Contrary to Figure 2.1, where the input variables were external variables, input x now
consists of previous values of the time series. The goal is to find a model f(x, θ) with
inputs x and n-dimensional parameter vector θ that approximates y as good as possible.
This can be seen as finding the point in the n-dimensional parameter space that minimizes
some cost criterion.
Besides parameter optimization of the model, on can also do structural optimization of
the model. Here, one optimizes for example what kind of function f is best to use, and the
optimal number of parameters for that function f . It is important that we structurally
optimize the model which we intend to use for the time series prediction.
4

(Non)stationarity of the System
A common assumption in time series prediction is that the system generating the data
is stationary and that the data points are independent and identically distributed (i.i.d).
That is, they can be seen as individual samples from the same distribution, where the
measurements do not affect each other. Under this stationarity assumption, the training
data is generally a good indication for what data to expect in the test phase.
However, a large number of application areas of prediction involve nonstationary phenom-
ena. In these systems, the i.i.d. assumption does not hold since the system generating the
time series changes over time. Therefore, one has to keep learning and adapting the model
as new samples arrive. Besides the need to deal with nonstationarity, another motivation
for developing an approach that is able to deal with nonstationarity is that one can then
drop stationarity requirements on the time series. This would be very useful, since often
we cannot assume anything about whether a time series is stationary or not.
Data Preprocessing
Before doing any function approximation, the data needs to be preprocessed. This of-
ten includes removing the mean from the data (such that it has zero-mean) and scaling
the variance of the data (such that it has unit-variance). This way, when applying a
model, similar assumptions about the time series can be made and can compare results
for otherwise different time series. For detailed info on preprocessing, see [3].
2.2 Functional Approximation
Having recast the task of time series prediction as a functional approximation (or regres-
sion) problem, the problem of one-step ahead time series prediction can be described as
follows
yi = f(xi, θ) (2.2)
where xi is a 1× d vector [x(t− d+1), . . . , x(t)] with d the number of past values that are
used as input, and yi the approximation of x(t + 1). Note the difference between xi and
between x(t). We use the notation xi to denote a vector of values of the time series and
x(t) to denote a value of the time series at time t.
Depending on what kind of relation we think there exists between the inputs variables
and output variables of a given problem, the regression is performed on either the input
variables themselves or nonlinear transformations of them. We see an example of the latter
in Section 2.5, where we discuss a class of neural networks which is trained by performing
regression on nonlinear transformations of the input variables (i.e. the outputs of the
hidden layer).
With the simplest form of regression, function f becomes a linear combination of the input
variables. Given a number of training samples (xi, yi)N−di=1 we can define
5

X =
x(1) x(2) . . . x(d)
x(2) x(3) . . . x(d + 1)...
.... . .
...
x(N − d) x(N − d + 1) . . . x(N − 1)
,
Y =
x(d + 1)
x(d + 2)...
x(N)
(2.3)
where d is the number of inputs and N the number of training samples. The matrix X is
also know as the regressor matrix and each row contains an input, while the corresponding
row in Y contains the corresponding target to approximate.
If we denote the weight vector [β1, . . . , βd]T by β, then the optimal weight vector can be
computed by solving the system
Xβ = Y. (2.4)
This weight vector is optimal in the sense that it gives the least mean square error (MSE)
approximation of the training targets, given input X.
The optimal weight vector can be computed as follows [4]:
Xβ = Y
XTXβ = XTY
(XTX)−1(XTX)β = (XTX)−1XTY
β = X†Y
where X† is known as the pseudo-inverse or Moore-Penrose inverse [5].
Furthermore, since the approximation of the output for given X and β is defined as
Y = Xβ we get
Y = Xβ
= X(XTX)−1XTY
= HAT ·Y
where HAT is defined as X(XTX)−1XT . The HAT-matrix is the matrix that transforms
the output Y into the approximated output Y . We see the HAT-matrix later again when
we discuss PRESS statistics in Section 3.2.1.
Instead of doing regression on the input, one can also consider linear combinations of
nonlinear functions of the input variables (called basis functions). This approach is a lot
more powerful and can, given enough basis functions, approximate any given function
under the condition that these basis functions are infinitely differentiable. In other words,
they are universal approximators [6].
6

2.3 Model Selection
As mentioned earlier, one can optimize the parameters of a model as well as the structure
of a model. In optimizing the structure of a model, one generates a collection of models to
compare, and then evaluates them according to some criteria. The models being compared
can be different in a lot of ways. Some examples of where models can structurally differ
are
• the number of neurons in the hidden layer of a neural network,
• the number of layers in the neural network,
• the learning algorithm being used to train a neural network,
• the size of the regressor (i.e. the number of variables being taken as input),
• which variables are used to build the regressor (i.e. we could build a regressor that
contains only the values x(t − 5), x(t − 10), x(t − 11) as input at time t),
• which basis functions are being used in the hidden layer of the neural network,
• any other parameters defining the structure of the model that are not being trained
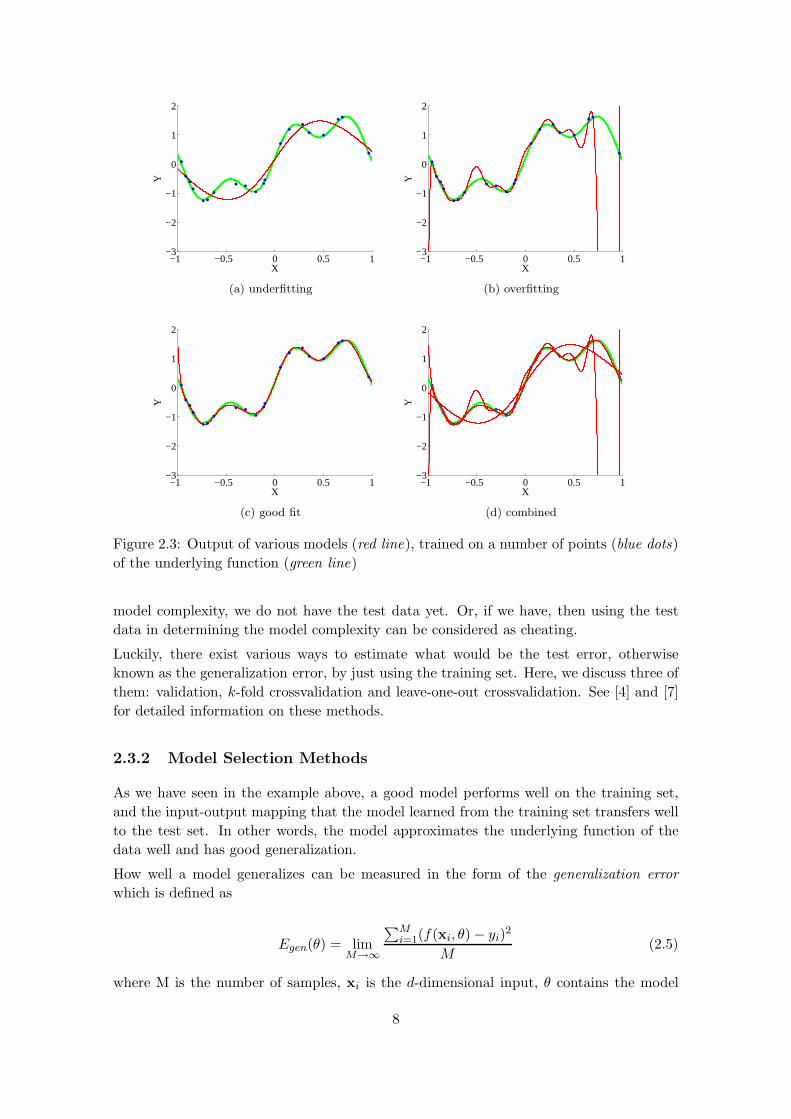
2.3.1 Example: Influence of Model Complexity
In selecting the right model, the model complexity is an important factor. If the model
is too complex, it will perfectly fit the training data, but will have bad generalization on
data other than the training data. On the other hand, if the model is too simple, it will
not be able to approximate the training data at all. These cases are known as overfitting
and underfitting.
Figure 2.3a shows training data and the output of a too simple model. It is obvious that
the model is not able to learn the functional mapping between inputs and outputs.
Figure 2.3b shows the same training data, but this time with the output of a too complex
model. While it perfectly approximates the points it was trained on, it can be seen that
it has poor generalization performance and does not approximate the underlying function
of the data very well.
Figure 2.3c shows a model that shows good approximation performance on the data it was
trained on, and at the same time approximates the underlying function of the data well.
From these examples, it becomes clear that there is a trade-off between accuracy of the
model on the training set, and the generalization performance of the model on the test
set.
In Figure 2.4 the effect of the number of hidden neurons in a feedforward neural network
(Extreme Learning Machine) on the test error can be seen. Since there is some variability
in the test error because of the random nature of the model, we repeat the experiment
50 times (gray lines) and show the mean (black line) and the standard deviation for all
measurements.
From this example, it seems obvious what is the optimal model complexity. However,
keep in mind that in this example we are using the test set in order to determine the
optimal model complexity. Normally, at the time where we need to select the optimal
7
−1 −0.5 0 0.5 1−3
−2
−1
0
1
2
X
Y
(a) underfitting
−1 −0.5 0 0.5 1−3
−2
−1
0
1
2
X
Y
(b) overfitting
−1 −0.5 0 0.5 1−3
−2
−1
0
1
2
X
Y
(c) good fit
−1 −0.5 0 0.5 1−3
−2
−1
0
1
2
X
Y
(d) combined
Figure 2.3: Output of various models (red line), trained on a number of points (blue dots)
of the underlying function (green line)
model complexity, we do not have the test data yet. Or, if we have, then using the test
data in determining the model complexity can be considered as cheating.
Luckily, there exist various ways to estimate what would be the test error, otherwise
known as the generalization error, by just using the training set. Here, we discuss three of
them: validation, k-fold crossvalidation and leave-one-out crossvalidation. See [4] and [7]
for detailed information on these methods.
2.3.2 Model Selection Methods
As we have seen in the example above, a good model performs well on the training set,
and the input-output mapping that the model learned from the training set transfers well
to the test set. In other words, the model approximates the underlying function of the
data well and has good generalization.
How well a model generalizes can be measured in the form of the generalization error
which is defined as
Egen(θ) = limM→∞
∑Mi=1(f(xi, θ) − yi)
2
M(2.5)
where M is the number of samples, xi is the d-dimensional input, θ contains the model
8

0 100 200 300 400 500 600 700 8000
50
100
150
number of hidden neurons
mea
n sq
uare
test
err
or
Figure 2.4: The effect of model the number of hidden neurons on test error
parameters, and yi is the output corresponding to input vector xi.
Of course, in reality we do not have an infinite number of samples. What we do have is
a training set and a test set, consisting of samples that the model will be trained on and
samples that the model will be tested on, respectively. Therefore, the training set is to be
used to estimate the generalization performance, and thus the quality, of a given model.
We will now discuss three different methods that are often used in model selection and
the estimation of the generalization error of a model.
Validation
In using validation, one sets aside part of the training set in order to evaluate the general-
ization performance of the trained model. If we denote the indexes of the samples in the
validation set by val and the indexes of the samples in the full training set by train, then
the estimation of the generalization error is defined as
EVALgen (θ∗) =
∑
i∈val(f(xi, θ∗trainrval) − yi)
2
|val|(2.6)
where θ∗trainrval denotes the model parameters trained on all samples that are in the
training set, but not in the validation set. Note that after the validation procedure and
selecting the model, the model is trained on the full training set.
The problem with this validation procedure is that is not that reliable, since we are
only holding out a small part of the data for validation, and we have no idea of how
representative this sample is for the test set. It would be better if we could use the
training set more effectively. This is exactly what k-fold crossvalidation does.
9

k-Fold Crossvalidation
In k-fold crossvalidation, we do exactly the same thing as in validation, but now we divide
the training set into k parts, each of which is used as validation set once, while the rest of
the samples are used for training. The final estimation of the generalization error is the
mean of the generalization errors obtained in each fold
EkCVgen (θ∗) =
∑ks=1
[∑
i∈vals(f(xi, θ
∗trainrvals
) − yi)2]
M(2.7)
where θ∗trainrvalsdenotes the model parameters trained on all samples that are in the
training set, but not in validation set vals.
In practice, it is common to use k = 10. k-fold crossvalidation gives a better estima-
tion of the generalization error, but since we are doing the validation k times it is more
computationally intensive than validation.
Leave-one-out Crossvalidation
Leave-one-out (LOO) crossvalidation is basically a special case of k-fold crossvalidation,
namely the case where k = n. The models are trained on M training sets, in each of which
exactly one of the samples has been left out. The left-out sample is used for testing, and
fhe final estimation of the generalization error is the mean of the M obtained errors
ELOOgen (θ∗) =
∑Mi=1(f(xi, θ
∗−i) − yi)
2
M(2.8)
where θ∗−i denotes the model parameters trained on all samples that are in the training
set except on sample i.
Due to the fact that we make maximum use of the training set, the LOO crossvalidation
gives the most reliable estimate of the generalization error. While the amount of compu-
tation for LOO crossvalidation might seem excessive, in many cases one can apply some
mathematical tricks to prevent a lot of computation. Therefore, it does not need as much
computation as one might think. In Section 3.2.3 we will see an example of this.
2.4 Ensemble Models
2.4.1 Introduction
To explain ensemble models, it is helpful to first look to an example from real life. You
might know of these contests at events where you need to guess the number of marbles
in a glass vase. The person who makes the best guess wins the price. It turns out that
while each individual guess is likely to be pretty far of, the average of all guesses is a good
estimate of real number of marbles in the vase. This phenomenon is often referred to as
’wisdom of the crowds’.
A similar strategy is employed in the building of ensemble models. An ensemble model
combines multiple individual models, with the goal of reducing the expected error of
the model. Commonly, this is done by taking the average or a weighted average of the
individual models (see Figure 2.5), but other combination schemes are also possible [8].
10

For example, one could take the best n models and take a linear combination of those. A
good overview of ensemble methods is given by [4]. For an article focusing specifically on
ensembles of neural networks, see [9].
model1x
· · ·x
modelmx
Σ yens(t)
models ensemble
w1y1(t)
wmym(t)
Figure 2.5: A schematic overview of how models can be combined in an ensemble
2.4.2 Average of Models
Ensemble methods rely on having multiple good models with sufficiently uncorrelated
error. As described above, a common way to build an ensemble model is to take the
average of the individual models, in which case the output of the ensemble model becomes:
yens(t) =1
m
m∑
i=1
yi(t)), (2.9)
where yens(t) is the output of the ensemble model, yi(t) are the outputs of the individual
models and m is the number of models.
Following [4], it can be shown that the variance of the ensemble model is lower than the
average variance of all the individual models:
Let y(t) denote the true output that we are trying to predict and yi(t) the estimation for
this value of model i. Then, we can write the output yi(t) of model i as the true value
y(t) plus some error term ǫi(t):
yi(t) = y(t) + ǫi(t). (2.10)
Then the expected square error of a model becomes
E[{
yi(t) − y(t)}2
] = E[ǫi(t)2]. (2.11)
The average error made by a number of models is given by
Eavg =1
m
m∑
i=1
E[ǫi(t)2]. (2.12)
Similarly, the expected error of the ensemble as defined in Equation 2.9 is given by
11

Eens = E
[{ 1
m
m∑
i=1
yi(t) − y(t)}2]
= E
[{ 1
m
m∑
i=1
ǫi(t)}2]
. (2.13)
Assuming the errors ǫi(t) are uncorrelated (i.e. E[ǫi(t)ǫj(t)] = 0) and have zero mean
(E[ǫi(t)] = 0), we get
Eens =1
mEavg . (2.14)
Note that these equations assume completely uncorrelated errors between the models,
while in practice errors tend to be highly correlated. Therefore, errors are often not
reduced as much as suggested by these equations, but can be improved by using ensemble
models. It can be shown that Eens < Eavg always holds. Note that this only tells us that
the test error of the ensemble is smaller than the average test error of the models, and that
it is not necessarily better than the best model in the ensemble. Therefore, the models
used in the ensemble should be sufficiently accurate.
2.4.3 Related Work
Ensemble models have been applied in various forms (and under various names) to time
series prediction, regression and classification. A non-exhaustive list of literature that dis-
cusses the combination of different models into a single model includes bagging [10], boost-
ing [11], committees [4], mixture of experts [12], multi-agent systems for prediction [13],
classifier ensembles [8], among others. Out of these examples, the work presented in this
thesis is most closely related to [13], which describes a multi-agent system prediction of
financial time series and recasts prediction as a classification problem. Other related work
includes [8], which deals with classification under concept drift (nonstationarity of classes).
The difference is that both papers deal with classification under nonstationarity, while we
deal with regression under nonstationarity.
2.5 Extreme Learning Machine
The Extreme Learning Machine (ELM) model has been proposed by Guang-Bin Huang
et al. in [14]. It is a type of Single-Layer Feedforward Neural Network (SLFN) and it
can be used for function approximation (regression) and classification. Most traditional
algorithms for training a SLFN use some learning rule that adapts all the weights based
on the showing of a single training example or a batch of training examples [3].
Extreme Learning Machines on the other hand, rely on certain properties of the network.
Namely, if the weights and biases in the input layer are randomly initialized, and the
transfer functions in the hidden layer are infinitely differentiable, then the optimal output
weights for a given training set can be determined analytically. The obtained output
weights minimize the square training error.
Since the network is trained in very few steps it is very fast to train, and it is therefore
an attractive candidate model for use in a function approximation problem. A schematic
overview of the structure of the ELM can be seen in Figure 2.6.
12

input xi1
input xi2
input xi3
input xi4
output yi
Hidden
layer
Input
layer
Output
layer
Figure 2.6: A schematic overview of an ELM
Now, we will review the main concepts of ELM as presented in [14] in more detail.
Consider a set of M distinct samples (xi, yi) with xi ∈ Rd and yi ∈ R; then, a SLFN with
N hidden neurons is modeled as the following sum
N∑
i=1
βif(wixj + bi), j ∈ [1,M ], (2.15)
where f is the activation function, wi are the input weights to the ith neuron in the hidden
layer, bi the biases and βi are the output weights.
In the case where the SLFN would perfectly approximate the data (meaning the error
between the output yi and the actual value yi is zero), the relation is
N∑
i=1
βif(wixj + bi) = yj, j ∈ [1,M ], (2.16)
which can be written compactly as
Hβ = Y, (2.17)
where H is the hidden layer output matrix defined as
H =
f(w1x1 + b1) · · · f(wNx1 + bN )...
. . ....
f(w1xM + b1) · · · f(wNxM + bN )
, (2.18)
and β = (β1 . . . βN )T and Y = (y1 . . . yM )T .
Given the randomly initialized first layer of the ELM and the training inputs xi ∈ Rd, the
hidden layer output matrix H can be computed. Now, given H and the target outputs
yi ∈ R (i.e. Y), the output weights β can be solved from the linear system defined
by Equation 2.17. This solution is given by β = H†Y, where H† is the Moore-Penrose
generalized inverse of the matrix H [5]. This solution for β is the unique least-squares
solution to the equation Hβ = Y.
13

Overall, the ELM algorithm now can be summarized as:
Algorithm 1 ELM
Given a training set (xi, yi),xi ∈ Rd, yi ∈ R, an activation function f : R 7→ R and N the
number of hidden nodes,
1: - Randomly assign input weights wi and biases bi, i ∈ [1, N ];
2: - Calculate the hidden layer output matrix H;
3: - Calculate output weights matrix β = H†Y.
Theoretical proofs and more details on the ELM algorithm can be found in the original
paper [14] and in [15].
14

Chapter 3
Adaptive Ensemble Models
3.1 Adaptive Ensemble Model
When creating a model to solve a certain regression or classification problem, it is unknown
in advance what the optimal model complexity and structure is. Therefore, as discussed
in Section 2.3.2 we should optimize the model structure by means of of a model selection
method like validation, crossvalidation or leave-one-out validation. Doing this, can be quite
costly however, and in case we are dealing with a nonstationary process generating the
data, it is not guaranteed that the model which we select based on a set of training samples
will be the best model 100 or a 1000 time steps later. In the case of a nonstationary process
the i.i.d. assumption does not hold, and the information gathered from past samples can
become inaccurate. Therefore, it is required to keep learning and keep adapting the model
once new samples become available.
Possible ways of doing this include:
• using a combination of different models (each of which is specialized on a part of the
state space), and do online model selection
• retraining the model repeatedly on a finite window into the past, such that it ’follows’
the nonstationarity
In this thesis, we investigate both strategies in one-step ahead prediction on (non)stationary
time series, in which we predict the next value of the time series, given all its past values.
On the one hand, we combine a number of different models in a single ensemble model
and adapt the weights with which these models contribute to the ensemble. The idea
behind this is that as the time series changes, a different model will be more optimal to
use in prediction. By monitoring the errors that the individual models in the ensemble
make, we can give higher weight to the models that have good prediction performance for
the current part of the time series, and lower weight the models that have bad prediction
performance for the current part of the time series.
On the other hand, we retrain the individual models on a limited number of past values
(sliding window) or on all known values (growing window). This way, the models will
be adapting to the changing input-output mapping that is a result of the nonstationary
character of the system generating the time series.
Now we will discuss in more detail how we combine different ELMs in an a single ensemble
15

model, how we adapt the ensemble weights, and how we adapt the models themselves.
3.2 Adaptive Ensemble Model of ELMs
The ensemble model consists of a number of randomly initialized ELMs, which each have
their own parameters (as discussed in Section 2.5). So each model can have different
regressor variables and size, different number of hidden neurons, and different biases and
input layer weights.
The model ELMi has an associated weight wi which determines its contribution to the
prediction of the ensemble. Each ELM is individually trained on the training data and the
outputs of the ELMs contribute to the output yens of the ensemble as follows: yens(t) =∑
i wiyi(t). See Figure 3.1 for a schematic overview of this.
ELM1x
· · ·x
ELMmx
Σ yens(t)
models ensemble
w1y1(t)
wmym(t)
Figure 3.1: A schematic overview of how ELMs can be combined in an ensemble
For initialization of the ensemble model, each of the individual models is trained on a given
training set, and initially each model contributes with the same weight to the output of
the ensemble. We will refer to this as uniform weight initialization.
3.2.1 Initialization of the Ensemble Model using PRESS Residuals
As an alternative to uniform weight initialization, we can try to improve the initial weights
by basing them on the leave-one-out output of the models on the training set. We will
refer to this as leave-one-out weight initialization.
The leave-one-out output can be computed from the true output and the leave-one-out
error, which we already saw in Section 2.3.2. The definition of the leave-one-out error is
ǫi,−i = yi − xib−i = yi − yi,−i. (3.1)
where ǫi,−i is the leave-one-out error when we leave out sample i, yi is the target output
specified by sample i from the training set, and b−i are the obtained weights when we
train the model on the training set with sample i left out.
The leave-one-out error ǫi,−i is also known as a PRESS residual, since it is used in the
PRESS (Prediction Sum of Squares) statistic [16]. The PRESS statistic is defined as
16

PRESS =
M∑
i=1
(yi − yi,−i)2 =
M∑
i=1
(ǫi,−i)2. (3.2)
and is closely related to the estimation of the generalization error of a model by leave-one-
out crossvalidation (see Section 2.3.2).
Although it might seem that there is a lot of computation involved in the computation of
ǫi,−i (i.e. we need to train M models), it can be computed quite efficiently. Namely, it
turns out that we can compute the PRESS residuals from the ordinary residuals (i.e. the
errors of the trained model on the training set) as follows
ǫi,−i =ǫi
1 − xi(XTX)−1xT
i
=yi − yi
1 − xi(XTX)−1xT
i
=yi − xib
1 − xi(XTX)−1xT
i
=yi − xib
1 − hii
where hii is the diagonal of the HAT matrix X(XTX)−1XT , which we already encountered
in Section 2.2. Therefore, we only need to train the model once on the entire training set
in order to obtain b, and compute the HAT matrix once. Once we have computed those,
all the PRESS residuals can easily be derived using the above equation. Obviously, this
involves a lot less computation than training the model for all M possible training sets.
Using the obtained PRESS residuals, we can compute the leave-one-out outputs through
Equation 3.1. Given the leave-one-out outputs for all m models, we perform linear regres-
sion1 on these m vectors in order to fit them to the target outputs of the training set and
to obtain the initial ensemble weights. Using this procedure, models that have bad gen-
eralization performance get relatively low weight, while models with good generalization
performance get higher weights.
3.2.2 Adaptation of the Ensemble
Once initial training of the models on the training set is done, repeated one-step ahead
prediction on the ’test’ set starts. After each time step, the previous predictions yi(t − 1)
are compared with the real value y(t− 1). If the square error ǫi(t− 1)2 of ELMi is larger
than the average square error of all models at time step t−1, then the associated ensemble
weight wi is decreased, and vice versa. The rate of change can be scaled with a parameter
α, called the learning rate. Furthermore, the rate of change is normalized by the number
of models and the variance of the time series. This way, we can expect similar behaviour
on time series with different variance and ensembles with a different number of models.
The full algorithm can be found in Algorithm 2.
1with the restriction that the obtained weights should be non-negative.
17

See Figure 3.2 for typical plots of the adapting ensemble weights on two time series which
we will introduce in the next chapter.
0 2000 4000 6000 8000 100000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
time
wi
(a)
0 1000 2000 3000 4000 50000
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
time
wi
(b)
Figure 3.2: Plots showing part of the ensemble weights wi adapting over time during
sequential prediction on (a) Laser time series and (b) Quebec Births time series (learning
rate=0.1, number of models=10)
Algorithm 2 Adaptive Ensemble of ELMs
Given a set (x(t), y(t)),x(t) ∈ Rd, y(t) ∈ R, and m models,
1: Create m random ELMs: (ELM1 . . .ELMm)
2: Train each of the ELMs individually on the training data
3: Initialize each wi to 1m
4: while t < tend do
5: generate predictions yi(t + 1)
6: yens(t + 1) =∑
i wiyi(t + 1)
7: t = t + 1
8: compute all errors → ǫi(t − 1) = yi(t − 1) − y(t − 1)
9: for i = 1 to #models do
10: ∆wi = −ǫi(t − 1)2 + mean(ǫ(t − 1)2)
11: ∆wi = ∆wi · α/(#models · var(y))
12: wi = max(0, wi + ∆wi)
13: Retrain ELMi
14: end for
15: renormalize weights → w = w/ ||w||
16: end while
3.2.3 Adaptation of the Models
As described above, ELMs are used in the ensemble model. Each ELM has a random
number of input neurons, random number of hidden neurons, and random variables of the
regressor as input.
Besides changing the ensemble weights wi as a function of the errors of the individual
models at every time step, the models themselves are also retrained. Before making a
prediction for time step t, each model is either retrained on a past window of n values
18

(xi, yi)t−1t−n (sliding window), or on all values known so far (xi, yi)
t−11 (growing window).
Details on how this retraining fits in with the rest of the ensemble can be found in Algo-
rithm 2.
As mentioned in Section 2.5, ELMs are very fast to train, so retraining is possible in a
feasible amount of time. In order to speed up the retraining of the ELMs, we make use of
the recursive least square algorithm as defined by [17]. This algorithm allows you to add
samples to the training set of a linear model and will give you the linear model that you
would have obtained, had you trained it on the modified training set.
Suppose we have a linear model trained on k samples with solution b(k), and have P(k) =
(XT X)−1, which is the d × d inverse of the covariance matrix based on k samples, then
the solution of the model with added sample (x(k + 1), y(k + 1)) can be obtained by
P(k + 1) = P(k) − P(k)x′(k+1)x(k+1)P(k)1+x(k+1)P(k)x′(k+1) ,
γ(k + 1) = P(k + 1)x(k + 1),
ε(k + 1) = y(k + 1) − x(k + 1)b(k),
b(k + 1) = b(k) + γ(k + 1)ε(k + 1)
(3.3)
where x(k + 1) is a 1× d vector of input values, b(k + 1) is the solution to the new model
and P(k + 1) is the new inverse of the covariance matrix on the k + 1 samples.
Similarly, you can remove a sample from the training set of a linear model and obtain the
linear model that you would have obtained, had you trained it on the modified training
set. In this case, the new model with removed sample (x(k), y(k)) can be obtained by
γ(k − 1) = P(k)x′(k),
ε(k − 1) = y(k) − x(k)b(k)1−x(k)P(k)x′(k) ,
P(k − 1) = P(k) − P(k)x′(k)x(k)P(k)1+x(k)P(k)x′(k) ,
b(k − 1) = b(k) − γ(k)ε(k)
(3.4)
where b(k − 1) is the solution to the new model and P(k − 1) is the new inverse of the
covariance matrix on the k − 1 samples.
Since an ELM is essentially a linear model of the responses of the hidden layer, this can be
applied to (re)train the ELM quickly in an incremental way. More details and background
on these algorithms can be found in [17], [16], [18] and [19].
19

20

Chapter 4
Experiments
In the previous chapters we discussed the theory behind the adaptive ensemble models
that are the focus of this thesis. In particular, we discussed:
• how to build an ensemble out of individual models (i.e. combine a number of different
models into a single model by taking a weighted combination of their outputs)
• how to adapt the ensemble weights based on the errors of the individual models (i.e.
increase the weight of a model if it performs better than average, and vice versa)
• the various ways to initialize the ensemble weights (i.e. uniformly, or based on the
leave-one-out output of the models)
• the various ways in which to retrain the individual models (i.e. no retraining, re-
training with a sliding window or retraining with a growing window)
In the experiments that will be discussed in this chapter, we aim to get a better idea
about how all these factors influence the prediction performance of the ensemble. We will
run all experiments on two different time series, namely a stationary time series and a
non-stationary time series. The prediction performance is measured as the mean square
prediction error over the entire test set.
First, we run experiments with the most basic adaptive ensemble. In these experiments we
initialize the ensemble weights equally, and we vary the number of models in the ensemble
and the learning rate of the ensemble.
Second, we run experiments where we add the retraining of the models on either a sliding
window, or a growing window. Again we vary the number of models in the ensemble, the
learning rate of the ensemble.
Third, we run experiments with ensembles in which the initialize weights are based on the
leave-one-out output of the models. Again we vary the number of models in the ensemble,
the learning rate of the ensemble. We also vary the retraining method, in order to compare
with the results of the first two experiments.
Finally, we benchmark the various models to get an idea about their running time, and
we compare with one of the state-of-the-art models, the Least Squares Support Vector
Machine (LS-SVM) [20], in terms of running time and mean square prediction error.
Before we go on to the experiments themselves, we first describe the time series used in
the experiments.
21

4.1 Time Series
4.1.1 Motivation for the Choice of Time Series
In the experiments, we test the performance of the adaptive ensemble model in one-step
ahead prediction on both a stationary and a nonstationary time series. The fact that
one time series is stationary and the other nonstationary makes them good candidates for
testing models in different contexts.
We are especially interested to find out how well the method can adapt to the nonstation-
arity character of the time series. At the same time, we would like the method to perform
well on the stationary time series, so we know that we do not pay a heavy penalty for the
extra adaptivity of the model.
4.1.2 Stationary Time Series - Santa Fe Laser Data
The Santa Fe Laser Data time series [21] has been obtained from a far-infrared-laser
in a chaotic state. This time series has become a well-known benchmark in time series
prediction since the Santa Fe competition in 1991. It consists of approximately 10000
points and the time series is known to be a stationary time series.
The fact that it is a stationary time series means that the underlying system that generated
the data is not changing over time. Therefore, all measurements that make up the time
series are identically distributed, no matter at what time they were taken.
Because this time series is stationary, we can expect the training set to be a good indication
of the data we will encounter in the test phase. Figure 4.1 shows the first 1000 values of
the time series. The full time series is shown in Figure 4.2.
4.1.3 Nonstationary Time Series - Quebec Births
The Quebec Births time series [22] consists of the number of daily births in Quebec over
the period of January 1, 1977 to December 31, 1990. It consists of approximately 5000
points, is nonstationary and more noisy than the Santa Fe Laser Data. Figure 4.3 shows
the first 1000 values of the time series. The full time series is shown in Figure 4.4.
As can be seen from Figure 4.4, the time series is nonstationary. The fact that the time
series is nonstationary means that the system from which the data is measured is changing
over time. For example, because of external influences like the state of the economy.
Therefore, measurements that make up this time series are not identically distributed, but
their distribution depends on the time on which they were taken.
Because this time series is nonstationary, it is a good benchmark to compare adaptive
models that try to adapt to the changing properties of the time series, and models that
are trained once and are not adapted after training.
22

0 100 200 300 400 500 600 700 800 900 10000
50
100
150
200
250
300
t
x(t)
Figure 4.1: The Santa Fe Laser Data time series (first 1000 values)
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
50
100
150
200
250
300
t
x(t)
Figure 4.2: The Santa Fe Laser Data time series (complete)
23

0 100 200 300 400 500 600 700 800 900 1000100
150
200
250
300
350
400
t(days)
num
ber
of b
irths
Figure 4.3: The Quebec Births time series (first 1000 values)
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000100
150
200
250
300
350
400
t(days)
num
ber
of b
irths
Figure 4.4: The Quebec Births time series (complete)
24

4.2 Experiments
4.2.1 Experiment 1: Adaptive Ensembles of ELMs
In this experiment, we test the performance of the most basic ensemble of Extreme Learn-
ing Machines (ELMs) in one-step ahead time series prediction on both Santa Fe Laser
Data and Quebec Births.
The models that make up the ensemble are Extreme Learning Machines (ELMs) that are
randomly generated. The ELMs are trained on the first 1000 values of the time series, after
which we test the ensemble model on the rest of the time series. The individual models are
not being retrained. Each ELM has between 150 and 200 hidden neurons with a sigmoid
transfer function. For prediction on the Santa Fe Laser Data we use a regressor size of 8
(of which 5 to 8 variables are randomly selected), and for prediction on the Quebec Births
data we use a regressor size of 14 (of which 12 to 14 variables are randomly selected).
The ensemble model has its weights initialized equally. During the process of one-step
ahead prediction the ensemble weights are adapted, based on the errors of the individual
models (see Section 3.2.2).
Both the number of models in the ensemble, and the learning rate of the ensemble are
being varied, in order to find out their influence on the prediction performance of the
ensemble. See Table 4.1 for a summary the used parameters in this experiment.
Table 4.1: Parameters for Experiment 1
ensemble model
#models m 10-100 (steps of 10)
learning rate α 0.00-0.20 (steps of 0.01)
initial weights 1/m
models
type ELM
regressor size 8 (Laser), 14 (Quebec)
#selected variables 5-8 (Laser), 12-14 (Quebec)
#hidden neurons 150-200
trained on first 1000 values
retraining none
Because of the random nature of ELMs we run the experiment 20 times. This way we get
an idea about the expected performance of the ensemble model and about the variance
on the performance that is a result of the random make-up of the ELMs in the ensemble.
Each run results in a measurement of the mean square test error of the ensemble for all
parameter combinations, as depicted in Figure 4.5. From now on, we will only show 2D
slices of 20 of these surfaces, together with their mean and standard deviation. We will
mostly show slices with the number of models equal to 100, or the learning rate equal
to 0.1. Please note that while here we only report the results in the form of plots, the
corresponding tables with results can be found in the Appendixes.
25

Figure 4.5: The result of a single run: a measurement of the mean square test error over
all parameter combinations
26

Santa Fe Laser Data
Figure 4.6a shows the effect of the number of models on the prediction accuracy. It can be
seen that the number of models strongly affects the prediction accuracy, and the variance
becomes less as the number of models increases.
Figure 4.6b shows the effect of the learning rate on the prediction accuracy. It can be
seen that when the learning rate is zero (and we are just taking an average of the models),
the performance is not too bad, but when the learning rate is increased, the performance
quickly becomes better and flattens out. The optimal learning rate seems to be at about
a learning rate of 0.12.
0 20 40 60 80 10016
18
20
22
24
26
28
30
32
number of models in ensemble
mea
n sq
uare
test
err
or
(a) #models vs. MSEtest (learning rate=0.1)
0 0.05 0.1 0.15 0.216
18
20
22
24
26
28
30
32
learning rate
mea
n sq
uare
test
err
or
(b) learning rate vs. MSEtest (#models=100)
Figure 4.6: MSEtest of ensemble on Laser time series as a function of (a) the number of
models and (b) the learning rate, with individual runs (gray lines), the mean of all runs
(black line), and the standard deviation on all runs (error bars).
The prediction accuracy of the ensemble improves greatly on that of the individual models.
In Figure 4.7 we show the distribution of the prediction error of 100 models making up
an ensemble. The average prediction error of these models is 108.1, while that of the
ensemble made up by these models is 17.72.
0 50 100 150 200 250 300 3500
2
4
6
8
10
12
mean square test error
num
ber
of m
odel
s
Figure 4.7: Distribution of MSEtest of 100 individual models on Laser time series.
27

Quebec Births
The effect of the number of models and the learning rate on the prediction accuracy can
be seen in Figure 4.8a and Figure 4.8b. The figures show similar results as with the
Laser time series. The number of models strongly affects the prediction accuracy, and the
variance becomes less as the number of models increases.
As the learning rate is increased, the performance quickly becomes better, although it
does not change as abruptly as with the Laser time series.The optimal learning rate seems
to be at about a learning rate of 0.09.
0 20 40 60 80 100535
540
545
550
555
560
565
570
575
580
number of models in ensemble
mea
n sq
uare
test
err
or
(a) #models vs. MSEtest (learning rate=0.1)
0 0.05 0.1 0.15 0.2535
540
545
550
555
560
565
570
575
580
learning rate
mea
n sq
uare
test
err
or
(b) learning rate vs. MSEtest (#models=100)
Figure 4.8: MSEtest of ensemble on Quebec time series as a function of (a) the number of
models and (b) the learning rate, with individual runs (gray lines), the mean of all runs
(black line), and the standard deviation on all runs (error bars).
600 620 640 660 680 700 720 740 760 780 8000
2
4
6
8
mean square test error
num
ber
of m
odel
s
Figure 4.9: Distribution of MSEtest of 100 individual models on Quebec time series.
The prediction accuracy of the ensemble again improves greatly on that of the individual
models. In Figure 4.9 we show the distribution of the prediction error of 100 models
making up an ensemble. The average prediction error of these models is 681.9, while that
of the ensemble made up by these models is 549.9.
28

4.2.2 Experiment 2a: Sliding Window Retraining
In this experiment, we investigate the effect of retraining of the individual models on a
sliding window of the past 1000 values of the data. We use the same parameters as defined
in Table 4.1, and only change the retraining method.
Santa Fe Laser Data
The effect of the number of models and the learning rate on the prediction accuracy can
be seen in Figure 4.10a and Figure 4.10b. The figures show similar results as experiment
1, but retraining on a sliding window seems to result in worse prediction performance.
0 20 40 60 80 10020
25
30
35
40
45
50
number of models in ensemble
mea
n sq
uare
test
err
or
(a) #models vs. MSEtest (learning rate=0.1)
0 0.05 0.1 0.15 0.220
25
30
35
40
45
50
learning rate
mea
n sq
uare
test
err
or
(b) learning rate vs. MSEtest (#models=100)
Figure 4.10: MSEtest of ensemble (retrained on sliding window) on Laser time series as a
function of (a) the number of models and (b) the learning rate, with individual runs (gray
lines), the mean of all runs (black line), and the standard deviation on all runs (error
bars).
0 50 100 150 200 250 300 350 4000
2
4
6
8
10
mean square test error
num
ber
of m
odel
s
Figure 4.11: Distribution of MSEtest of 100 individual models on Laser time series.
The prediction accuracy of the ensemble again improves greatly on that of the individual
models. In Figure 4.11 we show the distribution of the prediction error of 100 models
making up an ensemble. The average prediction error of 100 models is 115.32, while that
of the ensemble made up by these models is 24.60.
29

Quebec Births
The effect of the number of models and the learning rate on the prediction accuracy can
be seen in Figure 4.12a and Figure 4.12b. We can see that retraining on a sliding window
improves the prediction performance a lot. Furthermore, for an ensemble of 100 models
that are retrained on a sliding window, the performance does not vary that much with
different learning rates.
0 20 40 60 80 100445
450
455
460
465
470
475
480
number of models in ensemble
mea
n sq
uare
test
err
or
(a) #models vs. MSEtest (learning rate=0.1)
0 0.05 0.1 0.15 0.2449
450
451
452
453
454
455
learning rate
mea
n sq
uare
test
err
or
(b) learning rate vs. MSEtest (#models=100)
Figure 4.12: MSEtest of ensemble (retrained on sliding window) on Quebec time series as a
function of (a) the number of models and (b) the learning rate, with individual runs (gray
lines), the mean of all runs (black line), and the standard deviation on all runs (error
bars).
530 540 550 560 570 580 590 600 610 620 6300
2
4
6
8
mean square test error
num
ber
of m
odel
s
Figure 4.13: Distribution of MSEtest of 100 individual models on Quebec time series.
The prediction accuracy of the ensemble again improves greatly on that of the individual
models. In Figure 4.13 we show the distribution of the prediction error of 100 models
making up an ensemble. The average prediction error of 100 models is 570.35, while that
of the ensemble made up by these models is 450.98.
30

4.2.3 Experiment 2b: Growing Window Retraining
In this experiment, we investigate the effect of retraining of the individual models on a
growing window of all past values of the data. Again we vary the number of models in
the ensemble, the learning rate of the ensemble. We use the same parameters as defined
in Table 4.1, and only change the retraining method.
Santa Fe Laser Data
The effect of the number of models and the learning rate on the prediction accuracy
can be seen in Figure 4.14a and Figure 4.14b. Retraining on a growing window greatly
improves the prediction performance over the experiments without retraining and with
sliding window retraining. We even observe some ensembles that have a test error lower
than 14.
0 20 40 60 80 10012
14
16
18
20
22
24
26
28
number of models in ensemble
mea
n sq
uare
test
err
or
(a) #models vs. MSEtest (learning rate=0.1)
0 0.05 0.1 0.15 0.212
14
16
18
20
22
24
26
28
learning rate
mea
n sq
uare
test
err
or
(b) learning rate vs. MSEtest (#models=100)
Figure 4.14: MSEtest of ensemble (retrained on sliding window) on Laser time series as a
function of (a) the number of models and (b) the learning rate, with individual runs (gray
lines), the mean of all runs (black line), and the standard deviation on all runs (error
bars).
0 50 100 150 200 2500
2
4
6
8
10
12
mean square test error
num
ber
of m
odel
s
Figure 4.15: Distribution of MSEtest of 100 individual models on Laser time series.
The prediction accuracy of the ensemble again improves greatly on that of the individual
31

models. In Figure 4.15 we show the distribution of the prediction error of 100 models
making up an ensemble. The average prediction error of 100 models is 69.45, while that
of the ensemble made up by these models is 14.76.
Quebec Births
The effect of the number of models and the learning rate on the prediction accuracy can
be seen in Figure 4.16a and Figure 4.16b. Retraining on a growing window has slightly
worse performance than retraining on a sliding window. As we saw with retraining on the
sliding window, the performance does not vary that much with different learning rates for
an ensemble of 100 models.
0 20 40 60 80 100455
460
465
470
number of models in ensemble
mea
n sq
uare
test
err
or
(a) #models vs. MSEtest (learning rate=0.1)
0 0.05 0.1 0.15 0.2455
456
457
458
459
460
461
462
learning rate
mea
n sq
uare
test
err
or
(b) learning rate vs. MSEtest (#models=100)
Figure 4.16: MSEtest of ensemble (retrained on sliding window) on Quebec time series as a
function of (a) the number of models and (b) the learning rate, with individual runs (gray
lines), the mean of all runs (black line), and the standard deviation on all runs (error
bars).
490 500 510 520 530 540 550 560 5700
2
4
6
8
10
mean square test error
num
ber
of m
odel
s
Figure 4.17: Distribution of MSEtest of 100 individual models on Quebec time series.
The prediction accuracy of the ensemble again improves greatly on that of the individual
models. In Figure 4.17 we show the distribution of the prediction error of 100 models
making up an ensemble. The average prediction error of 100 models is 516.33, while that
of the ensemble made up by these models is 457.22.
32

4.2.4 Experiment 3: Initialization based on Leave-One-Out Output
In this experiment, we investigate whether we can improve the prediction performance
by initializing the ensemble weights based on the estimated generalization performance of
the individual models. We do that by computing the leave-one-out output of the models
on the first 1000 values of the time series and by then performing linear regression (see
Section 3.2.1 for more details). In this experiment, we vary the number of models in the
ensemble, the learning rate of the ensemble, and the retraining method. The rest of the
parameters is the same as in Table 4.1.
For this experiment, we only report the mean prediction performance, since the nature of
the results is similar to those reported in Experiment 1 and Experiment 2.
Santa Fe Laser Data
Figure 4.18 summarizes the results of the experiments on the Laser time series, and clearly
shows the effect of the initialization based on the leave-one-out output of the models.
For all learning rates and for all numbers of models in the ensemble, the performance is
significantly better. We see an especially large improvement in the performance for small
learning rates and contrary to the normal weight initialization, the leave-one-out initial-
ization has relatively good performance for a learning rate of zero. Interestingly, there
seems to be a relatively small optimal learning rate of about 0.01. Also, the performance
decreases again for higher learning rates, rather than flattening out.
In Figure 4.18 we can also see that for the Laser time series, retraining on a growing
window performs a lot better than not retraining, while retraining on a sliding window
performs a lot worse than not retraining (like we saw in the previous experiments).
Quebec Births
Figure 4.19 summarizes the results of the experiments on the Quebec time series. Contrary
to what we saw with the Laser series, the leave-one-out initialization performs worse than
the normal weight initialization. Furthermore, we can see that the higher the learning
rate becomes, the smaller the difference between both initialization strategies.
From Figure 4.19 we can clearly see that both retraining on a sliding window and retraining
on a growing window perform a lot better than not retraining, and that retraining on a
sliding window is slightly better than retraining on a growing window.
4.2.5 Experiment 4: Running Times and Least Squares Support Vector
Machine
Finally, in this experiment we benchmark the various models to get an idea about their
running time. In this experiment, we fix the learning rate and vary the number of models.
The time we measure is the time it takes to (re)train all models in the ensemble on the
time series, plus the time it takes to do the prediction on the rest of the time series. The
rest of the parameters of the individual models correspond to the parameters mentioned
in the earlier experiments. We also compare the ensemble models with one of the state-
of-the-art models, the Least Squares Support Vector Machine (LS-SVM) [20], in terms of
running time and mean square prediction error.
33
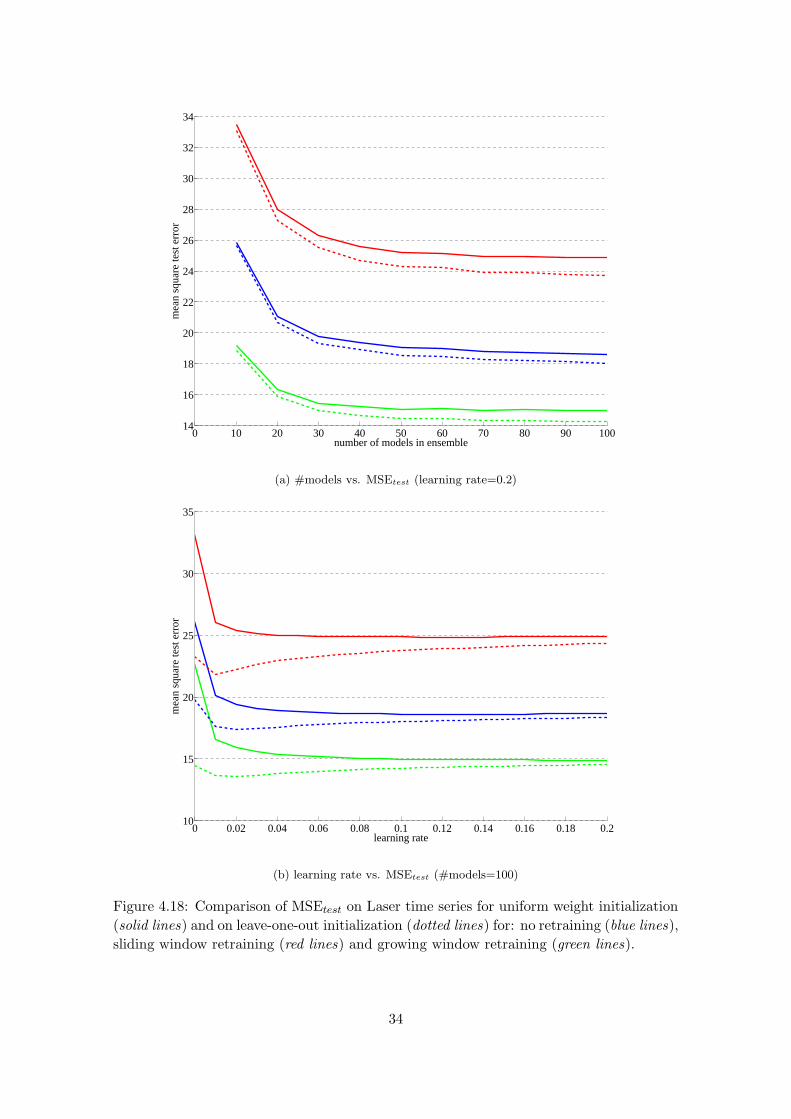
0 10 20 30 40 50 60 70 80 90 10014
16
18
20
22
24
26
28
30
32
34
number of models in ensemble
mea
n sq
uare
test
err
or
(a) #models vs. MSEtest (learning rate=0.2)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.210
15
20
25
30
35
learning rate
mea
n sq
uare
test
err
or
(b) learning rate vs. MSEtest (#models=100)
Figure 4.18: Comparison of MSEtest on Laser time series for uniform weight initialization
(solid lines) and on leave-one-out initialization (dotted lines) for: no retraining (blue lines),
sliding window retraining (red lines) and growing window retraining (green lines).
34

0 10 20 30 40 50 60 70 80 90 100440
460
480
500
520
540
560
580
number of models in ensemble
mea
n sq
uare
test
err
or
(a) #models vs. MSEtest (learning rate=0.2)
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2440
460
480
500
520
540
560
580
learning rate
mea
n sq
uare
test
err
or
(b) learning rate vs. MSEtest (#models=100)
Figure 4.19: Comparison of MSEtest on Quebec time series for uniform weight initialization
(solid lines) and on leave-one-out initialization (dotted lines) for: no retraining (blue lines),
sliding window retraining (red lines) and growing window retraining (green lines).
35

Santa Fe Laser Data
In Figure 4.20, the average running times of the various ensemble types are shown. From
Figure 4.20a, it can be seen that in case we are not retraining the models, the extra
ensemble weight initialization roughly doubles the running time. This makes sense, since
in the computation of the leave-one-out error we need to compute the HAT matrix (see
Section 2.2), which is quite similar to the pseudo-inverse of the hidden layer output matrix
H† that is needed for training the model (see Section 2.5).
0 20 40 60 80 1000
5
10
15
20
25
30
35
40
number of models in ensemble
time
(s)
(a)
0 20 40 60 80 1000
1000
2000
3000
4000
5000
6000
number of models in ensemble
time
(s)
(b)
Figure 4.20: Running time of the ensemble on Laser series for varying numbers of models
for uniform initialization (solid lines), LOO initialization (dotted lines), no retraining (blue
lines), sliding window retraining (red lines) and growing window retraining (green lines).
Figure 4.20b shows the average running times for the various ensemble types. We see
that when the models are retrained, the running time is a lot higher and retraining on
a growing window is faster than retraining on a sliding window. This makes sense, since
every iteration we need to both add and remove a sample, instead of just add a sample.
When retraining, every individual model is effectively retrained 9000 times. Although this
might seem excessive, the incremental learning of the model as described in Section 3.2.3
helps a lot. If we compare the average time each model adds to the running time of the
ensemble in Table 4.2, then we see that retraining with incremental learning is 10 to 12
times faster than retraining without incremental learning.
Furthermore, if we are retraining the models, we see that the time needed for the leave-
one-out initialization of the ensemble weights does not make much of a difference anymore.
Table 4.2: Average time (s) a single model adds to running time of ensemble on Laser
retraining
initialization incr. learning none sliding growing
uniform yes 0.23 51.01 41.01
uniform no - 496.55 501.38
leave-one-out yes 0.35 50.91 38.99
leave-one-out no - 499.46 512.3
36

Quebec Births
In Figure 4.21, the average running times of the various ensemble types are shown. The
results are similar to the results observed in the Laser time series, but the running times
are slightly faster due to the fact that the time series only has 5000 values instead of 10000.
0 20 40 60 80 1000
5
10
15
20
25
30
number of models in ensemble
time
(s)
(a)
0 20 40 60 80 1000
500
1000
1500
2000
2500
number of models in ensembletim
e (s
)
(b)
Figure 4.21: Running time of the ensemble on Quebec series for varying numbers of models
for uniform initialization (solid lines), LOO initialization (dotted lines), no retraining (blue
lines), sliding window retraining (red lines) and growing window retraining (green lines).
The average time each model adds to the running time of the ensemble is compared in
Table 4.3. The results are comparable to what we saw with the Laser time series. Namely,
we observe great speedups by the incremental learning, and growing window retraining is
performing slightly faster than sliding window retraining.
Table 4.3: Average time (s) a single model adds to running time of ensemble on Quebec
retraining
initialization incr. learning none sliding growing
normal yes 0.15 22.37 18.02
normal no - 201.82 212.62
leave-one-out yes 0.28 23.21 18.96
leave-one-out no - 205.06 210.51
Least Squares Support Vector Machine
Finally, we run one of the state-of-the-art algorithms, the Least Squares Support Vector
Machine (LS-SVM) [20], for comparison with the adaptive ensemble model of Extreme
Learning Machines in terms of prediction error and running time.
For running the LS-SVM, we use the LS-SVMlab Toolbox [23] by Suykens et al.. We have
to do structural selection of the model, as we earlier described in Section 2.3.2. For this,
we search for the optimal hyperparameters using the built-in grid search, where each of
the hyperparameter candidates is evaluated using 10-fold crossvalidation on the training
set. For an overview of the rest of the used parameters, see Table 4.4.
37
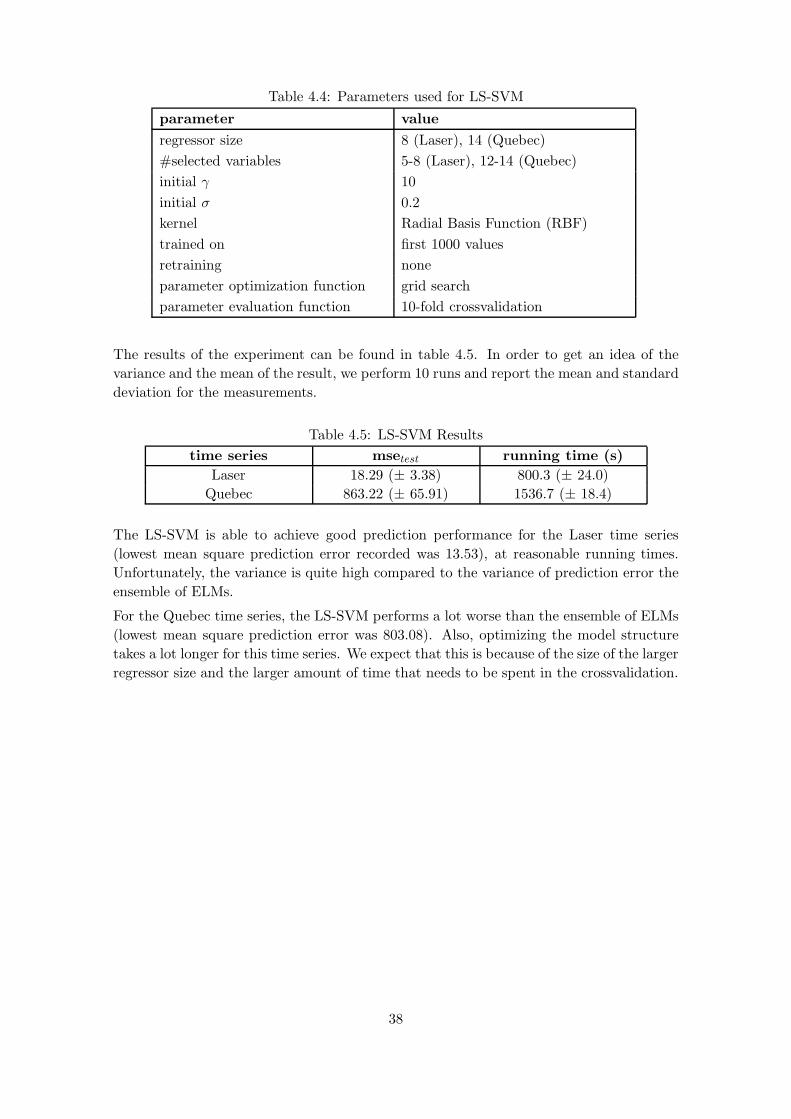
Table 4.4: Parameters used for LS-SVM
parameter value
regressor size 8 (Laser), 14 (Quebec)
#selected variables 5-8 (Laser), 12-14 (Quebec)
initial γ 10
initial σ 0.2
kernel Radial Basis Function (RBF)
trained on first 1000 values
retraining none
parameter optimization function grid search
parameter evaluation function 10-fold crossvalidation
The results of the experiment can be found in table 4.5. In order to get an idea of the
variance and the mean of the result, we perform 10 runs and report the mean and standard
deviation for the measurements.
Table 4.5: LS-SVM Results
time series msetest running time (s)
Laser 18.29 (± 3.38) 800.3 (± 24.0)
Quebec 863.22 (± 65.91) 1536.7 (± 18.4)
The LS-SVM is able to achieve good prediction performance for the Laser time series
(lowest mean square prediction error recorded was 13.53), at reasonable running times.
Unfortunately, the variance is quite high compared to the variance of prediction error the
ensemble of ELMs.
For the Quebec time series, the LS-SVM performs a lot worse than the ensemble of ELMs
(lowest mean square prediction error was 803.08). Also, optimizing the model structure
takes a lot longer for this time series. We expect that this is because of the size of the larger
regressor size and the larger amount of time that needs to be spent in the crossvalidation.
38

Chapter 5
Discussion
In this chapter, we will discuss the results of the experiments in greater detail and we will
try to put the results in perspective.
First, we discuss the influence of the different parameters that we varied in the various
experiments. Then, we compare the adaptive ensemble models with the LS-SVM and
further discuss in what context the adaptive ensemble models can be used, in light of
these results.
5.1 Effect of Number of Models
In all experiments, we can clearly see that combining multiple models into a single ensemble
model results in better performance than each of the models by itself. Also, adding more
models generally results in better expected prediction performance. Furthermore, the
more models are added to the ensemble, the smaller the variance on the performance
becomes.
While more experiments would be required to get insight in the exact relation between
the test error of the individual models and the test error of the ensemble of these models,
it seems that for the models used in prediction on the Laser time series, we get the most
dramatic improvement by ensembling them. In this case, an ensemble of 100 models
achieved a test error of 17.72, while the best model from that ensemble only was able to
achieve a test error of 33.85. For an ensemble of 100 models on the Quebec time series,
we observed a test error of 567.96 for the ensemble, while the best individual model from
that ensemble achieved a test error of 602.95.
5.2 Effect of Learning Rate
For both time series, we observed that the adaptive ensemble model improves on the
ensemble model that just takes the average of the models (i.e. learning rate of 0). Fur-
thermore, the effect of the learning rate seems to be the same across ensembles of different
numbers of models, as can be seen in Figure 5.1.
For both time series, we see that with increasing learning rate, the test error quickly drops
and then flattens out.
For the Laser time series, we see larger improvements than for the Quebec time series,
39

0 0.05 0.1 0.15 0.215
20
25
30
35
learning rate
mea
n sq
uare
test
err
or
(a)
0 0.05 0.1 0.15 0.2545
550
555
560
565
570
575
580
learning rate
mea
n sq
uare
test
err
or
(b)
Figure 5.1: MSEtest as a function of learning rate for (a) Laser time series and (b) Quebec
time series for 10 models (dashed line) and 100 models (solid line).
suggesting that for the ensembles used in prediction on the Laser time series it is more
important that we adapt the weights of the ensemble, such that good models get higher
weight, and vice versa.
Looking at the distribution of the test error in for example Figure 4.11, we indeed see
that there are a number of significantly worse models, which should be ’tuned’ out of the
ensemble as quickly as possible for optimal performance (i.e. the weight with which they
contribute to the ensemble should be reduced).
For the Quebec time series there are no significantly worse models and we observe a less
dramatic increase of performance by increasing the learning rate, giving further evidence
of the relation between the distribution of the test error of individual models and the effect
of learning rate on the performance of the ensemble.
In both time series we observe an optimal learning rate of about 0.1 when using uniform
ensemble weight initialization. Because this seems to hold for all numbers of models in
the ensemble, it seems to be a robust strategy to choose the number of models high and
set the learning rate to 0.1.
When using leave-one-out initialization however, the optimal learning rate seems to be a
lot lower (in case of the Laser time series), or slightly higher (in case of the Quebec time
series). In all cases, a learning rate of 0.1 still gives good performance though.
5.3 Effect of the Leave-one-out Weight Initialization
In Experiment 3, the leave-one-out weight initialization of the ensemble weights was in-
vestigated.
As can be seen from Figure 4.18, for the Laser time series the prediction performance of
the ensemble is improved for any number of models.
We especially see large improvements for the lower learning rates. The leave-one-out
initialization is effective at selecting those models that have good prediction performance
and effectively ’tunes out’ those models that have bad performance, leading to better
prediction performance of the ensemble. The optimal learning rate for the Laser time
40
series is about 0.01 for the leave-one-out weight initialization, and is about 0.1 for the
uniform weight initialization.
More experiments are needed to find out what exactly influences the value of the optimal
learning rate. However, based on these experiments, we suspect that there are at least the
following two factors that influence the optimal learning rate:
• the distribution of the test errors of the individual models: if we have particularly
bad models in the ensemble, then it is beneficial to quickly reduce the weights of
these models as earlier discussed in Section 5.2.
• the local (in time) biases of the individual models: ideally models have randomly
distributed errors [16]. In practice however, within small time intervals, a model
will locally overestimate or underestimate the true value of the time series and make
larger errors than it makes on average. A small learning rate can help in this case
to compensate for the local biases of the models and improve the performance of
the ensemble. Although more experiments are needed to verify this, we think this
could be a possible explanation for the relatively small optimal learning rate in
leave-one-out initialization of the ensemble weights.
Interestingly, for the Quebec time series, the leave-one-out weight initialization results in
worse performance than the uniform weight initialization. We imagine there could be two
possible causes for this:
• nonstationarity of the time series: the models that have good performance on the
beginning of the time series do not necessarily perform well on the later parts of the
time series. Therefore, starting with uniform ensemble weights could be a better
strategy than using estimates of the generalization performance of the individual
models based on their leave-one-out output on the training set.
• distribution of the test errors of the individual models: as can be seen from for
example Figure 4.19, the models all have quite similar test error. Because of this,
there is not so much need for model selection as was the case with the Laser time
series. Furthermore, as we saw in Section 2.4 on ensemble models, the improvement
of the performance of ensemble models relies on the uncorrelatedness of the errors of
the individual models. Therefore, even if models have relatively large error, adding
them to the ensemble can improve accuracy of the ensemble. However, since the
leave-one-out initialization of the ensemble weights assigns small weight to those
models with large error, this could have a negative impact on the accuracy of the
ensemble.
Again, more experiments would be needed to find out how these different factors exactly
contribute to the performance of the ensemble.
5.4 LS-SVM and Performance Considerations
As we can see in Experiment 4, ELMs are extremely fast to train and they can also be
retrained at every time step in reasonable time, thanks to the possibility of incrementally
training them on a sliding or a growing window. That is, being able to add a sample to the
41

training set or removing a sample from the training set and obtaining the newly trained
model from the current model, without completely having to retrain it. It is also worth
mentioning that it is possible to improve the performance by caching the outputs of the
hidden layer for each input, since these are typically needed multiple times.
Of course, the good performance of the models has little meaning if the models do not
have good prediction performance, so therefore we compare the performance with the
performance of Least Squares Support Vector Machines (LS-SVM) [20].
5.4.1 Comparing models
It should be said in advance that comparisons between methods that one is not an expert
in, do not necessarily show the maximum performance of an algorithm. If you have been
working with a certain algorithm for a long time and have a lot of experience with it, you
probably have a better idea on how to get best performance in a certain problem. With
this in mind we proceed to the comparison with LS-SVM.
The settings we used in the experiment for training the LS-SVM are quite common settings
to use in regression problems [20, 24] and should give a good indication of the performance
we would get in the typical use of the LS-SVM. Note that because of the long running time
of the LS-SVM, we did not include any experiments where the LS-SVM is retrained. Here,
we are mostly interested in how the adaptive ensemble method compares in prediction
performance on a typical stationary regression problem. It would be interesting to further
investigate how the LS-SVM can be adapted for fast retraining and for application in
nonstationary time series, but this is something that falls outside the scope of this thesis.
For a fair comparison of the LS-SVM and the adaptive ensemble model of ELMs, we
made sure that both methods have the same information to work with, by using the same
settings for the regressor size and the amount of selected variables. While these potentially
are not the most optimal settings, this holds for both methods so even if we do not get
maximum performance, it should be a fair comparison.
5.4.2 Comparison on Laser Time Series
For the Laser time series, the LS-SVM achieved an average mean square test error of
18.29, with a standard deviation of 3.38 across the different runs. On average a run took
800.3 seconds to complete. As can be seen in Figure 4.18, Figure 4.6b and Appendix A
and B, an ensemble model of 100 ELMs without retraining and learning rate of 0.1 takes
about 23 seconds to run with uniform weight initialization, and achieves an average mean
square error of 18.63, with a standard deviation of 0.93. So, it has only a little bit worse
prediction performance while being about 32 times faster. Furthermore, the standard
deviation is a lot lower so the achieved prediction performance is more consistent.
Of course, we could add extra models to the ensemble to achieve better prediction perfor-
mance, but we expect only little improvement from this and it would be better to spend
time on for example leave-one-out weight initialization of the ensemble.
If we add leave-one-out weight initialization to the ensemble, then the same ensemble of
100 ELMs (no retraining, learning rate 0.1) achieves an average mean square error of 18.03,
with a standard deviation of 0.94, while still being 23 times faster than the LS-SVM.
42

5.4.3 Comparison on Quebec Time Series
As can be seen from the results of Experiment 4, the LS-SVM performs quite badly on the
Quebec time series and only achieves an average test error of time series 863.22 and takes
1536 seconds to run on average. In the same time, it would be possible to run an ensemble
of about 60 to 70 ELMs (see Figure 4.19) which would achieve a test error around 460
(see Figure 4.18).
From these results, we can conclude that the LS-SVM as it was used is not suited for
prediction on nonstationary time series, and that the adaptive ensemble seems to perform
nicely for nonstationary time series. Note that even when we do not retrain the individual
models, the adaptive ensemble model still performs a lot better than the LS-SVM.
Since we could not make a good comparison with LS-SVM on the nonstationary time series,
it would be interesting to see how the adaptive ensemble compares in terms of prediction
performance and running time with other methods that are suitable for prediction on
nonstationary time series.
43

44

Chapter 6
Future Work
No matter what area of research, there are always more questions to ask than one can
answer, as was the case with this thesis. In this chapter we will give several suggestions
for promising research directions that could be worth exploring as a continuation of this
work.
6.1 Explore Links with Other Fields
In this thesis we have looked at ensemble models of Extreme Learning Machines for one-
step ahead time series prediction, mostly from an experimental point of view.
At a rather late stage in the process, the links between this work and the field of adaptive
filtering and signal processing [25, 26] became clear. The theory behind adaptive filters is
well developed and adaptive filters can for example be used for noise reduction of signals,
echo cancellation and signal prediction. Especially the theory for signal prediction with
adaptive filters seems very useful for one-step ahead prediction.
Further exploration in applying techniques and theorems from adaptive filtering and signal
processing to the work discussed in this thesis definitely seems useful. I would even say that
it is required, since the links between both fields are quite strong and essentially solve the
same problem: approximating a target signal as good as possible based on various kinds
of input signals.
6.2 Improving on Input Selection
Even though the models presented in this thesis achieve good performance by choosing
sensible regressor sizes and input variables, there is probably a lot to be gained from doing
input variable selection. See for example [27] for an overview of input variable selection
methods and see [28] and [29] for information on the Delta test that can be used for
variable selection and data preprocessing.
6.3 Improving Individual Models
Another possibility is to improve on the individual models in the ensemble. For example,
one could use some criterion like the Aikaike information criterion (AIC), or Bayesian
45

information criterion (BIC) [4] to estimate the optimal number of hidden neurons to use
in the ELM.
Another natural extension of the current work is to use OP-ELM [24] instead of ELM,
which are basically ELMs where the least significant neurons are pruned for better gener-
alization.
6.4 Improving Ensemble Model
In changing the weights of the ensemble model, currently only the square errors are used,
so we are effectively losing the information about the sign of the error. This works great
and the models tend to have sufficiently uncorrelated error to be ensembled in an effective
way. However, we could possibly improve on this by explicitly taking into account the sign
of the error, and make sure that they are sufficiently uncorrelated. That is, we could try to
make sure that there is a certain degree of diversity between the models in the ensemble.
It is shown in [8] that strategies like bagging [10] or boosting [11] can improve ensemble
accuracy. In both these strategies each of the individual models is trained on a modified
version of the training set, which introduces diversity between the models.
Another interesting extension of the current work would be to use the estimated leave-
one-out output of the models at all times as a basis for the weights of the ensemble, and
not just as an initialization. While it might increase the required computational time,
this could potentially lead to a better combination of the individual models, with a better
prediction performance of the ensemble model as a result.
6.5 Other Degrees of Adaptivity
In the current method the models that are part of the ensemble are never removed, and
only the weight with which they contribute is changed. If a model consistently gives bad
performance though, we might as well remove it and reduce the computational time of the
ensemble or add another model instead.
A possible implementation would be one that we initially had in mind when starting this
work, but unfortunately never had time to implement. One could for example create a
hybrid version of the current method and an evolutionary algorithm in the form of a multi-
agent simulation. The models would then be seen as agents, and would be evaluated for
fitness and compete with other agents for a limited energy resource. At each time step,
the agents would gain or lose a certain amount of energy as a result of this. In case an
agent runs out of energy, it dies and in case it reaches a certain level of energy it replicates
with small variation of the parameters.
In the short term, this simulation would behave similar to the one described in this thesis,
and over the long term the models will hopefully adapt to the problem at hand and be able
to determine the model parameters that work best. An example use of such a simulation
could be to obtain pre-adapted models for a certain environment or prediction problem.
It would be interesting to see how effective this method would be at producing good
models, and how this method can be used in practice in time series prediction problems.
46

6.6 Parallel implementation
Because of the modular nature of ensemble models, another promising future direction
of the work presented in this thesis is the parallellization of the ensemble models (and
the individual models). The ensemble models can easily be parallelized by executing the
individual models in parallel on different nodes of a cluster. Often, the individual models
themselves can be made faster as well by parallelizing them.
On the one hand, this parallelization will allow faster evaluation of the models, which is
always a desired property of a model. In certain cases, fast evaluation is even a necessary
property of the models. For example, in contexts where there are time constraints on
getting the prediction like the stock market or in control applications.
On the other hand, the faster evaluation of the models will also enable timely evaluation
of larger ensemble models, which could lead to improved prediction quality.
Finally, speeding up the evaluation of the ensemble models and individual models will
allow for more exploratory research. For example, think about running large number of
models, sweeping entire parameter ranges to investigate the effect of a certain parameter
on the performance, or doing exhaustive search on the huge number of model structures
one often has to deal with.
6.7 GPU Computing
Finally, a very promising direction that I hope to continue in myself is parallel computing
using video cards.
Nowadays, video cards are increasing more rapidly in terms of performance than normal
desktop processors, and provide huge amounts of computational power. For example, the
most high-end video card at the moment, the NVidia GTX295, has 2 Graphics Processing
Units (GPUs) which amount to a total of 1790 GFlops of computational power. Compared
to the approximately 50 GFlops for a high-end Intel i7 processor, this is huge.
In 2007, NVIDIA (one of the two main manufacturers of video cards) introduced CUDA [30],
which is an API that can be used to run your code on the highly-parallel GPUs.
Examples of succesful applications of CUDA can be found at [30], and include examples
from biotechnology [31], linear algebra [32], molecular dynamics simulations [33] and ma-
chine learning [34]. Depending on your application, speedups of 20-300 times are possible
by executing code on a single GPU instead of the CPU, and by using multiple GPUs you
should be able to obtain even higher speedups.
Thanks to funding from the Adaptive Informatics Research Centre (AIRC), we have been
able to design and build a desktop computer with three of these GTX295 video cards. This
particular setup gives a total amount of raw computational power of over 5 TeraFlops.
This is comparable to the computational power of a small cluster, and personally, I am
very much looking forward to see what can be achieved with this machine.
47

48

Chapter 7
Conclusions
In this thesis, we have presented an adaptive ensemble model of Extreme Learning Ma-
chines (ELMs) for use in one-step ahead prediction. The model has been analyzed on both
stationary and nonstationary time series, in terms of performance and prediction error.
The performed experiments provide a thorough overview of the influence of the various
parameters of the model, and show that in prediction on both stationary and nonstation-
ary time series, the adaptive ensemble method is able to achieve a prediction accuracy
comparable to or better than a state-of-the-art methods like the Least Squares Support
Vector Machine. Furthermore, the results suggest a robust strategy for choosing the pa-
rameters of the method (i.e. choose number of models sufficiently large and choose learning
parameter α = 0.1).
An added advantage besides the good prediction performance of the presented model, is
that it is able to achieve this prediction performance while remaining adaptive, and does
so at low computational cost.
Because of its modular nature, the presented ensemble model can easily be parallelized,
Therefore, even though the presented model already has low computational cost, it is
possible to speed it up even further quite easily.
Besides parallelizing, a large number of possible continuations for this work has been
provided. For example, a more thorough statistical analysis of the model, in order to
determine the best strategy for optimizing the parameters.
Overall, the results suggest that the adaptive ensemble model presented and analyzed
in this thesis, makes an excellent candidate for application in both a stationary and a
nonstationary context.
Finally, the simplicity and effectivity of the model, together with the large number of
possible aspects to investigate make it a nice subject to do research on. I certainly found
it an interesting research topic. Although at times it was frustrating when something was
not working as expected, I had a lot of fun doing the research for this thesis, and hope to
be able to further continue with this subject in the future.
49

50

Chapter 8
Bibliography
8.1 References
[1] A. Sorjamaa, J. Hao, N. Reyhani, Y. Ji, A. Lendasse, Methodology for long-term
prediction of time series., Neurocomputing 70 (16-18) (2007) 2861–2869.
[2] G. Simon, A. Lendasse, M. Cottrell, J.-C. Fort, M. Verleysen, Time series forecasting:
Obtaining long term trends with self-organizing maps, Pattern Recognition Letters
26 (12) (2005) 1795 – 1808.
[3] S. Haykin, Neural Networks: A Comprehensive Foundation, Prentice Hall, Upper
Saddle River, NJ, 1999, 2nd edition.
[4] C. M. Bishop, Pattern Recognition and Machine Learning (Information Science and
Statistics), Springer-Verlag New York, Inc., Secaucus, NJ, USA, 2006.
[5] C. R. Rao, S. K. Mitra, Generalized Inverse of Matrices and Its Applications, John
Wiley & Sons Inc, 1972.
[6] K. Hornik, M. B. Stinchcombe, H. White, Multilayer feedforward networks are uni-
versal approximators., Neural Networks 2 (5) (1989) 359–366.
[7] B. Efron, R. J. Tibshirani, An Introduction to the Bootstrap, Chapman & Hall/CRC,
1994.
[8] L. I. Kuncheva, Classifier ensembles for changing environments, MCS (2004) 1–15.
[9] L. Hansen, P. Salamon, Neural network ensembles, Pattern Analysis and Machine
Intelligence, IEEE Transactions on 12 (10) (1990) 993–1001.
[10] L. Breiman, Bagging predictors, in: Machine Learning, 1996, pp. 123–140.
[11] R. E. Schapire, Y. Freund, P. Bartlett, W. S. Lee, Boosting the margin: a new
explanation for the effectiveness of voting methods, The Annals of Statistics 26 (1998)
322–330.
[12] R. A. Jacobs, M. I. Jordan, S. J. Nowlan, G. E. Hinton, Adaptive mixtures of local
experts, Neural Computation 3 (1991) 79–87.
51

[13] S. Raudys, I. Zliobaite, The multi-agent system for prediction of financial time series,
Artificial Intelligence and Soft Computing - ICAISC 2006 (2006) 653–662.
[14] G.-B. Huang, Q.-Y. Zhu, C.-K. Siew, Extreme learning machine: Theory and appli-
cations, Neurocomputing 70 (1-3) (2006) 489 – 501.
[15] G.-B. Huang, L. Chen, C. K. Siew, Universal approximation using incremental con-
structive feedforward networks with random hidden nodes., IEEE Transactions on
Neural Networks 17 (4) (2006) 879–892.
[16] R. Myers, Classical and Modern Regression with Applications, 2nd edition, Duxbury,
Pacific Grove, CA, USA, 1990.
[17] G. J. Bierman, Factorization Methods for Discrete Sequential Estimation, Academic
Press, New York, NY, 1977.
[18] A. Sorjamaa, Strategies for the long-term prediction of time series using local models,
Master’s thesis, Helsinki University of Technology (October 14 2005).
[19] G. Bontempi, M. Birattari, H. Bersini, Recursive lazy learning for modeling and
control, in: European Conference on Machine Learning, 1998, pp. 292–303.
[20] J. A. K. Suykens, T. V. Gestel, J. D. Brabanter, B. D. Moor, J. Vandewalle, Least
Squares Support Vector Machines, World Scientific, Singapore, 2002.
[21] A. Weigend, N. Gershenfeld, Time Series Prediction: Forecasting the Future and
Understanding the Past, Addison-Wesley, 1993.
[22] Quebec Births Data: http://www-personal.buseco.monash.edu.au/~hyndman/
TSDL/misc/qbirths.dat.
[23] LS-SVMlab Toolbox Version 1.5: http://www.esat.kuleuven.ac.be/sista/
lssvmlab/.
[24] Y. Miche, A. Sorjamaa, A. Lendasse, OP-ELM: Theory, experiments and a toolbox.,
in: V. Kurkov, R. Neruda, J. Koutnk (Eds.), ICANN (1), Vol. 5163 of Lecture Notes
in Computer Science, Springer, 2008, pp. 145–154.
[25] M. H. Hayes, Statistical Digital Signal Processing and Modeling, Wiley, 1996.
[26] S. Haykin, Adaptive Filter Theory (4th Edition), Prentice Hall, 2001.
[27] J. Tikka, Input variable selection methods for construction of interpretable regression
models, Doctoral dissertation, TKK Dissertations in Information and Computer Sci-
ence TKK-ICS-D11, Helsinki University of Technology, Faculty of Information and
Natural Sciences, Department of Information and Computer Science, Espoo, Finland
(December 2008).
[28] E. Eirola, E. Liitiainen, A. Lendasse, F. Corona, M. Verleysen, Using the delta test
for variable selection, in: Proc. of ESANN 2008 European Symposium on Artificial
Neural Networks, 2008, pp. 25–30.
52

[29] F. Mateo, D. Sovilj, R. G. Girons, A. Lendasse, Rcga-s/rcga-sp methods to mini-
mize the delta test for regression tasks., in: J. Cabestany, F. Sandoval, A. Prieto,
J. M. Corchado (Eds.), IWANN (1), Vol. 5517 of Lecture Notes in Computer Science,
Springer, 2009, pp. 359–366.
[30] NVidia CUDA Zone: http://www.nvidia.com/object/cuda_home.html.
[31] M. Schatz, C. Trapnell, A. Delcher, A. Varshney, High-throughput sequence alignment
using graphics processing units, BMC Bioinformatics 8 (1).
[32] V. Volkov, J. W. Demmel, Benchmarking gpus to tune dense linear algebra, in: SC
’08: Proceedings of the 2008 ACM/IEEE conference on Supercomputing, IEEE Press,
Piscataway, NJ, USA, 2008, pp. 1–11.
[33] W. Liu, B. Schmidt, G. Voss, W. Muller-Wittig, Accelerating molecular dynamics
simulations using graphics processing units with cuda, Computer Physics Communi-
cations In Press, Corrected Proof.
[34] B. Catanzaro, N. Sundaram, K. Keutzer, Fast support vector machine training and
classification on graphics processors, in: Proceedings of the 25th International Con-
ference on Machine Learning (ICML 2008), Helsinki, Finland, 2008, pp. 104–111.
53

54

Appendix A
Santa Fe Laser Data Errors
uniform initialization
#models none slide grow
10 25.879 33.484 19.162
20 21.084 27.977 16.327
30 19.756 26.327 15.456
40 19.382 25.573 15.238
50 19.057 25.218 15.075
60 18.971 25.132 15.09
70 18.78 24.916 14.994
80 18.756 24.956 15.033
90 18.696 24.901 14.994
100 18.63 24.863 14.993
Table A.1: Average prediction error on Santa Fe Laser Data (learning rate=0.1)
leave-one-out initialization
#models none slide grow
10 25.652 33.091 18.881
20 20.649 27.258 15.886
30 19.328 25.544 14.975
40 18.909 24.704 14.669
50 18.555 24.307 14.461
60 18.474 24.2 14.458
70 18.274 23.901 14.339
80 18.207 23.877 14.333
90 18.123 23.792 14.27
100 18.023 23.743 14.245
Table A.2: Average prediction error on Santa Fe Laser Data (learning rate=0.1)
55

learning rate uniform initialization loo initialization
none slide grow none slide grow
0 26.113 33.155 22.68 19.83 23.298 14.445
0.01 20.109 26.009 16.586 17.625 21.865 13.658
0.02 19.424 25.383 15.915 17.384 22.266 13.6
0.03 19.096 25.14 15.577 17.465 22.649 13.693
0.04 18.915 25.018 15.375 17.583 22.928 13.807
0.05 18.808 24.951 15.248 17.69 23.133 13.91
0.06 18.739 24.915 15.163 17.778 23.297 13.999
0.07 18.694 24.893 15.102 17.853 23.434 14.075
0.08 18.664 24.878 15.056 17.917 23.55 14.14
0.09 18.643 24.868 15.021 17.973 23.652 14.196
0.10 18.63 24.863 14.993 18.023 23.743 14.245
0.11 18.623 24.859 14.972 18.068 23.826 14.289
0.12 18.619 24.857 14.955 18.109 23.9 14.328
0.13 18.619 24.857 14.941 18.147 23.969 14.363
0.14 18.621 24.858 14.931 18.182 24.033 14.395
0.15 18.625 24.862 14.924 18.215 24.093 14.425
0.16 18.631 24.866 14.918 18.247 24.149 14.452
0.17 18.638 24.872 14.914 18.277 24.201 14.477
0.18 18.646 24.879 14.911 18.306 24.25 14.501
0.19 18.655 24.888 14.91 18.334 24.298 14.523
0.20 18.665 24.897 14.909 18.361 24.343 14.544
Table A.3: Average prediction error on Santa Fe Laser Data (#models=100)
56

Appendix B
Quebec Birth Data Errors
uniform initialization
#models none slide grow
10 568.75 468.69 464.56
20 557.77 459.08 460.54
30 553.87 455.39 458.92
40 552.22 453.99 458.44
50 551.5 453.27 458.11
60 551 452.77 458.05
70 550.43 452.41 457.93
80 550.06 451.9 457.62
90 549.16 451.77 457.62
100 548.15 451.6 457.45
Table B.1: Average prediction error on Quebec Births (learning rate=0.1)
leave-one-out initialization
#models none slide grow
10 569.37 469.21 465.02
20 558.26 459.59 460.96
30 554.38 455.79 459.31
40 552.74 454.33 458.84
50 551.97 453.66 458.51
60 551.58 453.21 458.46
70 550.94 452.88 458.31
80 550.6 452.4 458.05
90 549.65 452.28 458.04
100 548.59 452.08 457.83
Table B.2: Average prediction error on Quebec Births (learning rate=0.1)
57

learning rate uniform initialization loo initialization
none slide grow none slide grow
0 566.86 452.5 460.02 574.18 459.02 462.31
0.01 556.88 451.96 459.13 564.51 456.97 461.28
0.02 552.86 451.66 458.55 558.22 455.48 460.46
0.03 550.86 451.54 458.19 554.29 454.41 459.8
0.04 549.7 451.5 457.95 551.91 453.65 459.28
0.05 548.99 451.49 457.77 550.48 453.11 458.87
0.06 548.56 451.5 457.65 549.62 452.73 458.55
0.07 548.3 451.52 457.57 549.11 452.47 458.3
0.08 548.16 451.54 457.51 548.81 452.28 458.1
0.09 548.12 451.57 457.47 548.65 452.16 457.95
0.10 548.15 451.6 457.45 548.59 452.08 457.83
0.11 548.22 451.63 457.44 548.61 452.03 457.74
0.12 548.34 451.67 457.43 548.66 452 457.68
0.13 548.48 451.71 457.44 548.76 451.99 457.64
0.14 548.65 451.76 457.45 548.88 451.98 457.62
0.15 548.82 451.8 457.47 549.03 451.98 457.6
0.16 549.01 451.85 457.5 549.19 452 457.6
0.17 549.2 451.9 457.52 549.35 452.02 457.6
0.18 549.39 451.95 457.55 549.53 452.04 457.61
0.19 549.58 451.99 457.59 549.7 452.07 457.63
0.20 549.77 452.04 457.62 549.87 452.1 457.65
Table B.3: Average prediction error on Quebec Births (#models=100)
58
![Adaptive LiDAR Sampling and Depth Completion using ... · arXiv:2007.13834v1 [cs.CV] 27 Jul 2020 1 Adaptive LiDAR Sampling and Depth Completion using Ensemble Variance Eyal Gofer,](https://img.dokumen.tips/doc/110x75/6021b7bc21a41d562d65cdbf/adaptive-lidar-sampling-and-depth-completion-using-arxiv200713834v1-cscv.jpg)




























