Embed Size (px)
Citation preview

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще!
Стефан Гарабитов


ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще!
ВЪВЕДЕНИЕ: ADAMS/View е мощно средство за моделиране и симулация на
околната среда. Програмата позволява да се проектира, визуализира и да се подобри механичния модел на система преди изграждането на физически прототип. Използването на ADAMS/View, а след това и ADAMS/Solver дава възможност за симулации на динамично поведение, за изчисляване на сили и движение, поведението на механична система и впоследствие да записване на получената информация в изходни файлове.
ADAMS/View е основна част от една ефективна, динамично развиваща се платформа на Virtual Product Development – виртуално разработване на изделия. Това е програмен пакет за виртуално моделиране на сложни машини и механизми. Програмния пакет MSC Adams с голям успех е използван при разработката на сложни машини и механизми в най големите предприятия на автомобилната и авиационната промишленост, в транспортното машиностроене, в предприятията за сложна битова техника, в медицинската промишленост е др. Интегрирането на MSC Adams с MSC Nastran, MSC Marc, MSC Patran и с ред други продукти на компанията MSC Software способства за бързото внедряване технологията Virtual Product Development в редица сложни производства и утвърждаването му като еталон при инженерната работа.


ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 5
НАЧАЛНИ СТЪПКИ ЗА РАБОТА С ADAMS/View СЪДЪРЖАНИЕ:
1. СТАРТИРАНЕ НА ADAMS/View 7 1.1. Как да стартираме програмата? 7 1.2. Основни настройки 7
1.2.1. Задаване на гравитация 7 1.2.2. Задаване на работна мрежа 8 1.2.3. Задаване на основни измервателни единици 8
2. СЪЗДАВАНЕ НА ГЕОМЕТРИЧЕН МОДЕЛ 9
2.1. Как се създава елемент? 9 2.1.1. Създаване на конструкторски точки 9 2.1.2. Създаване на връзки 10 2.1.3. Създаване на блокове 10 2.1.4. Създаване на равнини 10 2.1.5. Създаване на криви (splines) 11 2.1.6. Прецизиране на геометричното разположение? 12
2.2. Маркери 13 2.2.1. Какво е маркер? 13 2.2.2. Използване на маркери 13
3. СЪЗДАВАНЕ НА КИНЕМАТИЧНИ ВРЪЗКИ 14
3.1. Как се създават връзки? 14 3.2. Типове връзки 14
3.2.1. Въртяща връзка (Revolute/Rotational Joint) 14 3.2.2. Постъпателна връзка (Translational Joint) 15 3.2.3. Неподвижна връзка (Fixed Joint) 15 3.2.4. Присъединена връзка (Pin in slot Joint) 16 3.2.5. Контурна връзка (Cam contact) 17
4. ЗАДАВАНЕ НА СИЛИ И ДВИЖЕНИЯ 17
4.1. Задаване на външни сили върху телата 17 4.2. Задаване на движения във връзките 18

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
6 Инвестира във вашето бъдеще!
4.2.1. Задаване на въртеливо движение (Rotational motion) 19 4.2.2. Задаване на постъпателно движение (Translational motion) 19
4.3. Пружини и пружинни сили 20
5. СИМУЛАЦИЯ НА МОДЕЛА 21 5.1. Проверка на модела 21 5.2. Симулиране на модела 22
5.2.1. Симулационен панел 22 5.2.2. Задаване на време 23 5.2.3. Задаване на времевата стъпка 24
6. ТЪЛКУВАНЕ НА РЕЗУЛТАТИТЕ 24
6.1. Измерване на геометричните параметри 24 6.2. Измерване на физичните характеристики 25 6.3. Създаване на чертежи от измерванията 26
7. РЕШЕНИ ПРИМЕРНИ ЗАДАЧИ: 28
7.1. Просто махало 28 7.2. Гърбица 37 7.3. Клатеща се кулиса 53 7.4. Елипсографен механизъм 56
8. ЗАДАНИЯ ЗА УПРАЖНЕНИЕ: 58
8.1. Моделиране на двойна ръка на манипулатор 58 8.2. Шарнирен четиризвенен механизъм 60 8.3. Коляно-мотовилков механизъм 62

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 7
1. СТАРТИРАНЕ НА ADAMS/View 1.1. Как да стартираме програмата?
1) В Windows инсталация, кликнете на Start, след това посочете Programs, посочете Adams, кликнете на Aview
2) След клик на Adams – view се появява следния прозорец:
3) Избират се директорията в която ще съхранявате работата си, както и името. Избират се гравитацията и желаните измервателни единици. Клик OK за продължение.
1.2. Основни настройки
1.2.1. Задаване на гравитация
Всички създадени обекти в ADAMS/View ще се влияят от приложената гравитация в проекта. Повечето примери са с подразбиращо се земно притегляне в „y” направление.
ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
8 Инвестира във вашето бъдеще!
1) В настройките на ADAMS/View, Settings, menu, изберете Gravity 2) Появява се Gravity Settings Window. 3) Задавате желаната стойност на 4) Потвърждавате с OK за да запазите промените.
1.2.2. Задаване на работна мрежа
Може да използвате вградената в ADAMS/View мрежа (Grid) и координатния прозорец, за да зададете прецизна позиция на детайлите във вашата конструкция. При създаване на геометрията на конструкция курсорът ще залепва към координатите на работната мрежа, ако режимът (Snap to Grid) е активиран.
1) В менюто на ADAMS/View настройки (Settings), изберете Working Grid
2) Появява се диалогът за настройки Working Grid Settings. Това позволява да променяте своите настройки за работната мрежа (grid settings), такива като размер и разстояние между отделните точки. Можете също да превключвате между полярни и декартови координати, което е удобно при въвеждане и измерване на ъгли.
1.2.3. Задаване на основни измервателни единици В ADAMS/View, можете да променяте измервателните единици по всяко време в процеса на моделиране, дори когато се чете или записва модел или резултати от изчисленията във файл.
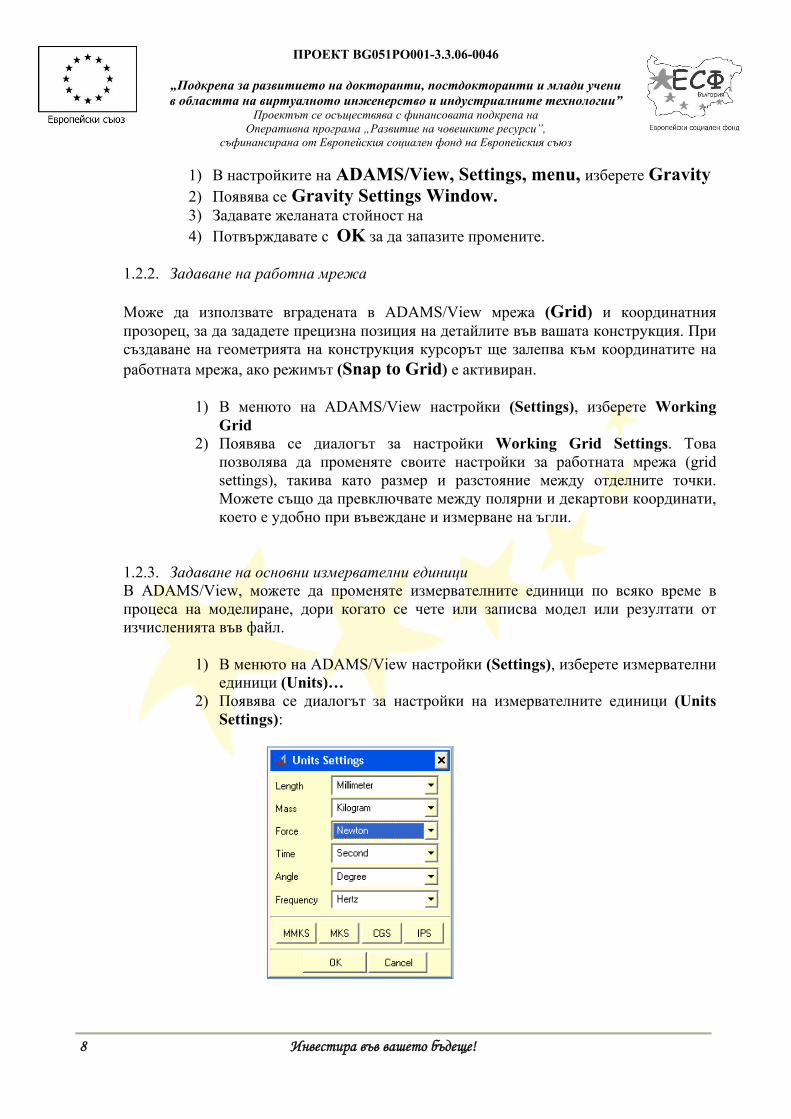
1) В менюто на ADAMS/View настройки (Settings), изберете измервателни единици (Units)…
2) Появява се диалогът за настройки на измервателните единици (Units Settings):

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 9
3) Измервателните единици могат да бъдат избирани от падащото меню, встрани от всяка дименсия
• Натиснете OK за да запазите настройките.
ADAMS/View ще стартира Основния инструментален прозорец (Main Toolbox) в дясно и празно работно поле с мрежа. В Основния инструментален прозорец ( Main Toolbox) има възможност за запознаване с основните конструктивни елементи включително връзки.
2. СЪЗДАВАНЕ НА ГЕОМЕТРИЧЕН МОДЕЛ 2.1. Как се създава елемент?
1) Когато създавате детайли в ADAMS/View имайте предвид, че всички детайли са подложени на влиянието на предварително дефинираната гравиация. По подразбиране гравитацията е насочена по ос „у”.
2) При повечето детайли съществува възможността да бъдат присъединявани към други детайли или към корпуса (земята). Това може да бъде уточнено във възможността “Attach to Ground”, съществуваща за почти всички твърди тела.
3) Да се закрепи едно тяло(звено) за друго означава, че двете тела ще бъдат разглеждани като едно цяло и ще извършват едни и същи движения.
4) В случай, че дадено тяло не е прикрепено към друго или към корпуса (земята) то ще бъде разглеждано, като тяло със 6 степени на свобода.
5) За облекчаване на създаването на модела може да използвате репера на координатните системи по време на моделирането чрез кликване върху View и после върху Coordinate Window.
2.1.1. Създаване на конструкторски точки. Конструкторските точки се използват в ADAMS/View при създаване на детайли. Използването им позволява да променяте бързо изгледа на вашата конструкция и бързо да намирате подходящ механизъм за приложение. Използването на конструкторските точки позволява да правите бързи промени на конструкцията, просто чрез преместването им.
1) В основния инструментариум(main toolbox), десен клавиш „right-click” върху
инструмента звено Link за да се покаже набора инструменти „tool stack”.
2) Избирате инструмент „point tool” и посочвате положението, където искате да бъде установена конструкторската точка.
3) Значенията по подразбиране за точката е „добави към корпуса” - „Add to Ground” и „не присъединявай” - „Don’t attach”. Други възможности са „добави към детайла” - „Add to part” и „присъедини към най близкия” - „Attach Near”.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
10 Инвестира във вашето бъдеще!
4) За създаване на множество точки без необходимост от избиране на инструмента Point отново трябва да кликнете двойно „double-click” върху инструмента.
2.1.2. Създаване на връзки. 1) В основния инструментариум(main toolbox) изберете „инструмент за връзки” -
„Link tool” .
2) Връзката може да бъде създадена с използване на конструкторските точки или на специфични размери. За конструкторските точки – единичен клик с левия бутон на мишката върху отделните точки за да създадете връзката между тях.
3) Връзката може да бъде създадена и чрез специфични размери и кликване върху началната и крайната точка на връзката.
4) Във връзката по подразбиране участва новия детайл „New Part”. Разбира се връзка може да се добави и към вече съществуващ детайл.
За да видите пример за изграждане на връзки, разгледайте примера ”Коляно-мотовилков механизъм” – „Crank Slider Tutorial”.
2.1.3. Създаване на блокове. 1) В основния инструментариум(main toolbox) изберете „инструмент за връзки” -
„Link tool” , за да се покаже набора инструменти „tool stack”.
2) Изберете инструмент „кутия” – „Box tool” .
3) Кликнете в единия ъгъл на блока и след това на противоположния ъгъл на блока.
4) Функцията по подразбиране за блок е „нов детайл” – „New Part”. Разбира се може да добавите блок и към друга част или специфична облост.
За да видите пример за изграждане на връзки, разгледайте примера ”Гърбичен механизъм” – „Cam Tutorial”.
2.1.4. Създаване на равнини.
1) В основния инструментариум (main toolbox) изберете „инструмент за връзки” -
„Link tool” , за да се покаже набора инструменти „tool stack”.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 11
2) Изберете инструмент „равнина” – „Plate tool”
3) Изберете дебелината и радиуса на съответстващите равнини.
4) Кликнете с левия бутон „Left-click” върху местата или точките от описваната равнина.
5) Кликнете с десния бутон „Right-click” да затворите описанието на равнината.
2.1.5. Създаване на криви (splines).
Сплайн (spline) е крива, дефинирана от множество точки. Можете да създадете такава крива като дефинирате разположението на точките определящи кривата чрез избиране на съществуващи геометрични криви и определяне на точки от тях, които да бъдат използвани за сплайн. ADAMS/View изгражда гладка крива през тези точки. Вие можете да затворите кривата или да я оставите отворена. Затворената крива може да бъде дефинирана от минимум осем точки, докато отворената изисква поне четири точки. При създаване на сплайн геометрия , трябва да укажете дали нов детайл, съдържащ кривата или добавяте кривата към вече съществуващ обект. Ако създавате нов обект, то той няма маса тъй като е композиран само от линии. Може да го изтеглите (extrude) затворена крива в твърдо тяло, което притежава маса. За създаване на Сплайн (spline) крива е необходимо:
1) В основния инструментариум(main toolbox) изберете „инструмент за връзки” -
„Link tool” , за да се покаже набора инструменти „tool stack” и изберете
инструмента „сплайн” – „spline tool” .
2) Изберете „добавяне към детайл” - “add to part” ако искате да добавите крива към друг детайл. Изберете „нов детайл” - “new part” ако искате кривата да бъде отделен детайл.
3) Кликнете с левия бутон в прозореца на ADAMS/View в желаните координати
за сплайн крива – „spline/curve”. Първата и последната точка трябва да бъдат едни и същи ако желаете да създадете затворена крива.
4) Кликнете с десния бутон за да приключите с въвеждането на кривата. Вашата крива е готова.
5) Има възможност за промяна на кривата чрез „кликване и дърпане” - „clicking
and dragging” на „съществените точки” - “hot points” (квадратните кутийки) на кривата.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
12 Инвестира във вашето бъдеще!
За да видите пример за изграждане на криви, разгледайте примера ”Гърбичен механизъм” – „Cam Tutorial”.
2.1.6. Прецизиране на геометричното разположение?
Има няколко различни начина за въвеждане на точен ъгъл в определен детайл. Показаният по рано начин на точно въвеждане на координатите е един от тях.
Например, ако желаете звеното ви да бъде дълго 500mm и да е разположено на 30 degree спрямо хоризонта, вие можете да използвате геометрията и да посочите конструкторски точки в (0,0,0) и (433.013,250,0). Лесно е да се изгради звено между двете точки.
Друг начин да се зададе ъгъл е да се завърти звеното след като вече е било създадено.
1) Кликнете с левия бутон на мишката върху детайла, който искате да завъртите.
2) В долния ляв ъгъл на основния прозорец кликнете на „position: reposition
objects relative to view coordinates” . Появява се следния прозорец:
За да промените ъгъла на детайла, изберете желаната стойност на завъртане и изберете желаната посока на завъртане. По този начин може да се извърши и транслация на детайла.
В добавка, можете да завъртите детайла използвайки „промяна на позицията чрез въвеждане на координати” - „Position: repositioning objects relative to the

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 13
working grid by enetering coordinates”. Кликнете на иконата след това с
десен бутон на иконата Появява се следния прозорец:
Това позволява да се „вземе и да се постави” - “get” and “set” положението и ориентацията на обекта. Например ако желаете звеното да образува 30 degree ъгъл с „x”- оста, вие трябва да поставите „ориентацията” – „orientation” на 30 и кликнете “set”.
2.2. Маркери
2.2.1. Какво е маркер? Можете да създадете маркер определяне на местните координатна система за всяка част на вашия модел или земята. Маркерът има място (начало на координатната система) и ориентация. ADAMS / View автоматично създава маркери в центъра на масата на всички твърди геометрия и на котва точки по геометрия, които да определят местонахождението на обекта в пространството. Вие можете да създадете маркер дефинирайки местна координатна система върху произволен детайл от вашия модел или корпус. Маркера притежава местоположение (началото на координатата система) и ориентация. ADAMS/View автоматично създава маркери в масовия център на детайлите и в основната точка (anchor points) на геометрията, дефинираща разположението на обекта в пространството.
2.2.2. Използване на маркери. Добавяне и модифициране на маркери

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
14 Инвестира във вашето бъдеще!
1) В основния инструментариум(main toolbox) изберете „инструмент за връзки” -
„Link tool” , за да се покаже набора инструменти „tool stack”.
2) Изберете маркер на координатната система - Coordinate System Marker
3) В контейнера с настройки, изберете следното: 1) Дали искате да добавите маркер към корпуса или друга част от модела. 2) Как искате да бъде ориентиран маркера. От менюто за ориентация
(Orientation option menu), изберете метод на ориентация. 3) Ако изберете да добавите маркер към детайл, изберете въпросния детайл,
към който желаете да прикачите маркера. 4) Разположете курсора на мястото, където бихте искали да бъде разположен и
кликнете. 5) Ако изберете да ориентирате маркера по нещо различно от глобалната или
визуализираната система, изберете направлението на координатите на осите на маркера. Направете това за всяка ос на маркера.
3. СЪЗДАВАНЕ НА КИНЕМАТИЧНИ ВРЪЗКИ
3.1. Как се създават връзки?
1) Набора за създаване на връзки може да бъде активиран чрез кликване с десния
бутон върху иконата за въртяща връзка . 2) Връзките се използват в ADAMS/View за описване на начина по който си
взаимодействат две тела(части от модела) Те могат да бъдат разположени на произволно място в модела.
3) Когато създавате връзки, много важно е те да бъдат приложени в правилната равнина. В ADAMS/View е възможно да разгледате вашия модел от различни гледни точки. За да направите това трябва да кликнете с десния бутон в прозореца на ADAMS/View, на место свободно от детайл. Можете да избирате от Преден поглед Front <F> (по подразбиране), Десен поглед Right <R>, Поглед отгоре Top <T> и Изометричен изглед Iso <I> (3D). След създаване на връзка, добра идея е да се провери дали връзката е приложена в нужната равнина.
3.2. Типове връзки
3.2.1. Въртяща връзка (Revolute/Rotational Joint)
Въртящата връзка ).(Revolute/Rotational) позволява на едно тяло да се завърти спрямо права закрепена за друго тяло. За създаване на въртяща връзка трябва:
1) Изберете инструмента Revolute Joint

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 15
2) Настройките по подразбиране за въртящата връзка са “One Location” и “normal to grid”, което описва ориентацията на връзката. Ако връзката е изградена като “One Location”, тялото ще бъде закрепено за корпуса(земята), от друга страна възможността “2 Bod-1Loc” позволява едно тяло да се върти около друго.Ако е избрано “Normal to Grid”, връзката ще бъде изградена така че оста на въртене ще бъде перпендикулярна на разграфяването (grid).
3) Ако връзката е за едно тяло, закрепено за корпуса, кликнете на точката на въртене и въртящата връзка ще се появи под формата на стрелка около
избраната точка . 4) Ако изграждате връзка между две тела, променете настройката на “2 Bod-1
Loc” или “2 Bod-2 Loc”. Кликнете на детайл 1, детайл 2 и тогава на точката на свързване.
За пример за изграждане на въртяща връзка вижте примерите за гърбица Cam Tutorial или коляно-мотовилков механизъм Crank Slider Tutorial.
3.2.2. Постъпателна връзка (Translational Joint)
Постъпателната (плъзгащата) връзка позволява транслацията на едно тяло по направление на права закрепена за друго тяло. Тялото може да извършва само транслация, но не и ротация относно правата. Ориентацията на правата(вектора) на връзката определя направлението на плъзгане на едното тяло относно другото. Направлението на транслация е паралелно на ориентираната права (вектор) и минава през определената точка. За да изградите постъпателна (плъзгаща) връзка трябва:
1) Изберете инструмента Translational Joint . 2) Настройките по подразбиране са “One Location” и “Pick Feature”. 3) Кликнете върху детайла, извършващ транслацията. 4) Ще се появи бяла стрелка, показваща направлението на транслация на едното
тяло спрямо другото. Кликнете върху направлението, което искате да реализирате и постъпателната (плъзгащата) връзка ще бъде изградена и
показана . За пример за изграждане на въртяща връзка вижте примерите за гърбица Cam Tutorial или коляно-мотовилков механизъм Crank Slider Tutorial.
3.2.3. Неподвижна връзка (Fixed Joint)
Неподвижната връзка закрепва двете тела едно за друго, така че те не могат да се движат едно спрямо друго. Ефекта е сходен с този на използване само на един детайл. Ако при бъдещ анализ желаете да има възможност за относително движение на двете

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
16 Инвестира във вашето бъдеще!
тела просто изтрийте неподвижната връзка и я заменете с друга. За фиксираната връзка, разположението и ориентацията не оказва влияние на последващите анализи. Така че можете да я разположите на място където ще се вижда добре. За да изградите неподвижна връзка (Fixed Joint) трябва:
1) Изберете инструмента Fixed Joint . 2) Настройките по подразбиране са “One Location” и “Pick Feature”. В случай че
връзката е разположена в една точка, тя ще свързва тялото с корпуса. ADAMS/View дава възможност за настройка на връзката във вид две тела в една точка “Two Bod-1 Loc” и две тела в две точки “Two Bod-2 Loc”. При фиксираните връзки, разположението и направлението не са от значение. Единственото изключение е в случай че фиксираната връзка позволява прилагането на силов момент зависещ от мястото на разположение на връзката.
3) Клекнете върху детайла или детайлите, които трябва да бъдат фиксирани.
Връзката ще се покаже във вида . 4) Ако е избрана една част, то частта(детайла) ще бъде свързан към корпуса. Ако
са избрани две тела то ADAMS/View автоматично прилага връзката към двете тела. Това означава, че двете тела ще бъдат закрепени твърдо едно към друго.
3.2.4. Присъединена връзка (Pin in slot Joint)
Присъединената връзка дефинира ограничение от типа точка по крива, което задължава фиксирана точка от един детайл да лежи върху крива закрепена неподвижно към друго тяло. Първото тяло може да се търкаля или да се плъзга по кривата закрепена за второто тяло. Кривата върху второто тяло може да бъде равнинна или пространствена и отворена или затворена. Първият детайл не може да се откъсва от контакта с второто, точката трябва винаги да лежи на кривата. Присъединена връзка (Pin in slot Joint) За да се моделира присъединена връзка
използвайте инструмента за сплайн spline tool .
1) Изберете от инструментариума инструмента Pin in Slot Joint tool . 2) Няма настройки по подразбиране , защото трябва да бъдат описани конкретно. 3) Кликнете с левия бутон върху точката представляваща острието на плъзгача от
присъединената връзка (pin). ADAMS/View автоматично ще присъедини острието към модела на детайла. Кликнете с левия бутон на мишката върху кривата(spline) която ще ограничава движението. Много важно е точката върху която сте кликнали да бъде разположено върху самата крива. Присъединена
връзка (Pin in slot Joint) ще бъде изобразена на това място .
ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 17
За пример за изграждане на Присъединена връзка (Pin in slot Joint) вижте примерите за гърбица Cam Tutorial.
3.2.5. Контурна връзка (Cam contact)
Контурната връзка осигурява контакт на контур, закрепен към един детайл към друг контур, закрепен за втори детайл. Контурна връзка (Cam contact) се прилага при моделиране на гърбични механизми, където точката на контакт между двете тела се променя непрекъснато по време на движението на механизма. Кривите винаги остават в контакт, дори когато динамиката на процеса предизвиква нарушение на контакта. Мажете да проверявате силите в ограничението, за да проверявате дали ще се наруши контакта. Ако желаете по точно моделиране, можете да зададете контактните сили като вектор. Контурна връзка моделира само една точка на контакт. Ако желаете да моделирате гърбица с повече от една точка на контакт трябва да създадете връзка за всяко ограничение. За да създадете Контурна връзка (Cam contact):
1) Изберете от инструментариума Контурна връзка - curve on curve Cam tool
. 2) Няма настройки по подразбиране, поради спецификата на връзката. 3) Кликнете с леви клавиш върху кривата, която трябва да бъде в контакт с
другата крива. 4) Изберете кривата по която ще се осъществява контакта на точки от първата
крива по време на движение. Кривата може да бъде отворена или затворена. Забележете, че когато изберете затворена крива Dynamic Model Navigator осветява само част от кривата. ADAMS/View ще използва цялата крива.
За пример за изграждане на Контурна връзка (Cam contact) вижте примерите за гърбица Cam Tutorial.
4. ЗАДАВАНЕ НА СИЛИ И ДВИЖЕНИЯ
4.1. Задаване на външни сили върху телата
Външните сили са сили които се определят от приложените сили на отделните звена или на връзките между тях. Външните сили са доста общи като понятие, но вие можете да дефинирате сили със собствено поведение и големина, ADAMS/View функционална дефиниция, или параметри описани в собствена подпрограма свързана към ADAMS/View. ADAMS/View също позволява да уточните как тялото реагира на контакт с друго тяло по време на движение.
• За да приложите външна сила:

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
18 Инвестира във вашето бъдеще!
1) Кликнете с десния бутон на мишката на инструмента в основния инструментариум.
2) Изберете приложена сила - applied force (single component) чрез левия бутон на мишката.
3) Изберете направление на действие - Run-Time Direction съобразно следното: • Space Fixed – фиксиране в пространството.
•Body Moving – закрепено за подвижно тяло
•Two Bodies – Силата е приложена между две тела. Първото тяло се дефинира като активна сила, а второто като реакция на първоначалното действие.
4) Ако силата е приложена само към едно тяло, изберете специфика в конструкцията - Construction съобразно следното: •Pick Feature – Това позволява да изберете направление на действие на силата.
•Normal to Grid – ADAMS/View ще приложи автоматично сила в направление нормално на разграфяването (grid).
5) Изберете характеристика - Characteristic съобразно следното: •Constant – ADAMS/View позволява задаване на константна сила.
•Custom – Изчисляема – вие дефинирате уравнение за силата приложена към тялото. ADAMS/View развива силата на реакцията в съответното тяло.
6) Съобразно точки 3 и 4, изберете точния брой на телата и направленията. Силата трябва да се изобрази като маркер:
4.2. Задаване на движения във връзките
Предварително може да бъде зададено транслационно или въртеливо движение на транслационна или въртяща се връзка. Всяка изградена въртяща връзка отнема една степен на свобода от вече изградения модел. Движения във връзките могат да се дефинират много

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 19
лесно, но те са ограничени от движенията разрешени при горните типове връзки и движения до една ротация или една транслация.
4.2.1. Задаване на въртеливо движение (Rotational motion)
Въртелива движение може да бъде зададено за цилиндрична или въртяща се(ротационна) връзка. Въртеливо движение трябва да се прилага, когато тялото трябва да ротира. ADAMS/View върти първото звено около z-оста второто (това може да бъде корпуса).
1) Изберете инструмента за движение във въртяща връзка - rotational joint
motion с левия бутон на мишката в основния набор инструменти (the main tool box).
2) Въведете желаната скорост в полето за скорост (Speed). (Забележка: ADAMS/View автоматично задава скорост от 30 градуса за секунда. За да зададете скорост в радиани за секунда напишете след стойността на скоростта “r”. Използвайте “d” за градуса за секунда.
3) Използвайте левия бутон на мишката, за да изберете връзката на екрана, към която искате да приложите движението. Движението ще бъде показано с голяма стрелка около връзката:
4.2.2. Задаване на постъпателно движение (Translational motion)
Транслационно движение може да бъде зададено към цилиндрична или постъпателна (транслационна) връзка. Транслационно движение се прилага при стриктно постъпателно движение и отнема възможността за каквато и да е ротация.
1) Кликнете с десния бутон на мишката върху набора за движения на въртящи
връзки (rotational joint motion) за да видите всички възможни движения.
ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
20 Инвестира във вашето бъдеще!
2) Изберете инструмента за транслационно движение (translational joint motion)
със левия бутон на мишката. 3) Въведете желаната скорост в полето за скорост (Speed). 4) Използвайте левия бутон на мишката, за да изберете връзката на екрана, към
която искате да приложите движението.
4.3. Пружини и пружинни сили
ADAMS/View създава пружинни и сили на триене за да представи действащите сили между две звена разположени на разстояние едно от друго и движещи се относително едно спрямо друго в определено направление. За да създадете пружина трябва:
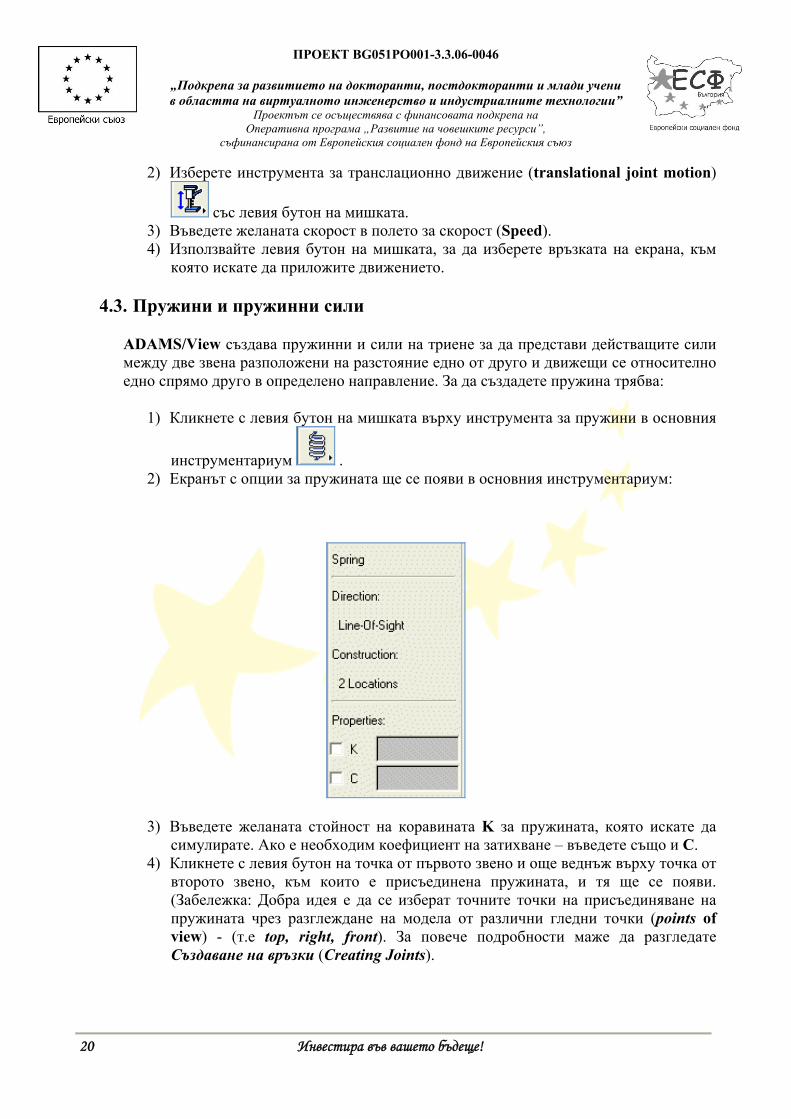
1) Кликнете с левия бутон на мишката върху инструмента за пружини в основния
инструментариум . 2) Екранът с опции за пружината ще се появи в основния инструментариум:
3) Въведете желаната стойност на коравината K за пружината, която искате да симулирате. Ако е необходим коефициент на затихване – въведете също и C.
4) Кликнете с левия бутон на точка от първото звено и още веднъж върху точка от второто звено, към които е присъединена пружината, и тя ще се появи. (Забележка: Добра идея е да се изберат точните точки на присъединяване на пружината чрез разглеждане на модела от различни гледни точки (points of view) - (т.e top, right, front). За повече подробности маже да разгледате Създаване на връзки (Creating Joints).

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 21
5. СИМУЛАЦИЯ НА МОДЕЛА 5.1. Проверка на модела
Можете да използвате инструмента Проверка на модела (Model Verify) за да проверите за наличие на грешки в изградения от вас модел, такива като неуспоредни връзки и неприсъединени звена. Инструмента може да бъде намерен чрез кликване с
десния бутон на мишката върху информационния бутон (information button) разположен в долния десен ъгъл на прозореца на ADAMS/View. Изберете инструмент
Проверка на модела (Model Verify) чрез клик . Ще се появи информационен прозорец:

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
22 Инвестира във вашето бъдеще!
Важна забележка: Този прозорец е индивидуален за всеки модел
Информационния прозорец дава важна информация за изградения модел, включително броя на подвижните звена и връзки. Ще бъде показано също и броя на степените на свобода на модела и тогава ще излезе съобщение за проверка на модела. Ако изградения модел не е проверен може да се появи необходимост от проверка на отделните връзки и звена.
5.2. Симулиране на модела
5.2.1. Симулационен панел
I. Симулационен панел
Симулационният панел е достъпен чрез клик с мишката върху инструмента -
simulation tool в основния инструментариум. Панела за симулация изглежда така:

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 23
Това е мястото където има достъп до всички команди, необходими за симулация на изградения модел. Първия набор от бутони в симулационния панел са (Назад)
Rewind , (Спри) Stop и (Изпълни) Play
На първо място трябва да изберете типа на симулацията който искате да използвате (По подразбиране - Default, Динамичен - Dynamic, Кинематичен - Kinematic или Статичен - Static). Докато нямате основателни причини за избор е добре да изберете По подразбиране - Default.
5.2.2. Задаване на време
II. Задаване на край на времето
Следващия избор от симулационния панел е избор на край на времето End Time или на продължителност Duration на симулацията. Избирането на край на времето ще стартира симулацията за останалото време от избраната продължителност , не е необходимо да се започва от началото (t = 0 sec). За да се направи това трябва:
1) Избира се край на времето - End Time или продължителност Duration от полетата за избор в симулационния панел.
2) Въвежда се желаното време за симулация.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
24 Инвестира във вашето бъдеще!
5.2.3. Задаване на времевата стъпка
III. Задаване на стъпката на времето
Времевите стъпки се използват в ADAMS/View за определяне на начина на работа на симулацията. Може да се избира Размер на стъпката - Step Size, който означава количеството време изтекло между две изобразявания и Стъпка - Steps, което означава броя на стъпките по време на цялата симулация. Двете възможности са доста сходни и са логически свързани една с друга. За да се зададе стъпка на времето трябва:
1) Избира се Steps или Step Size от съответното поле в симулационния панел. 2) Въвежда се желаната стойност за стъпката на времето (за секунди не се задава
нищо след цифрата).
6. ТЪЛКУВАНЕ НА РЕЗУЛТАТИТЕ 6.1. Измерване на геометричните параметри
След изграждане на модела може да си използва инструмента линия или транспортир за измерване и коригиране на размерите. Това може да бъде направено и по време на моделирането за проверка на точността на въвеждането.
За да измервате дължини:
Изберете инструмента за измерване - measure от основния инструментариум чрез клекване с левия бутон на мишката.
1) Кликнете с левия бутон върху първата точка, спрямо която ще се прави измерването.
2) Кликнете с левия бутон върху втората точка, до която ще се прави измерването.
3) Ще се появи графика, която ще показва как се променя разстоянието по време на симулацията.
За измерване на ъгли трябва:
Изберете инструмента за измерване - measure от основния инструментариум чрез клекване с левия бутон на мишката. Кликнете с левия бутон върху инструмента за ъгли
.
1) Кликнете с левия бутон на върха на първия вектор от ъгъла, който искате да измерите.
2) Кликнете с левия бутон в точката, която е връх на измервания ъгъл.
ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 25
3) Кликнете с левия бутон на върха на втория вектор от ъгъла, който искате да измерите.
4) Ще се появи графика, която ще показва как се променя ъгълът по време на симулацията.
6.2. Измерване на физичните характеристики Физическите характеристики или параметри могат да бъдат начертани за всеки обект създаден от ADAMS/View. Характеристиките включват позиция, скорост, ускорение момент и пр.
1) Кликнете с десния бутон на мишката върху обекта, който трябва да се измери, изберете част и посочете измерване - Measure от появилото си меню.
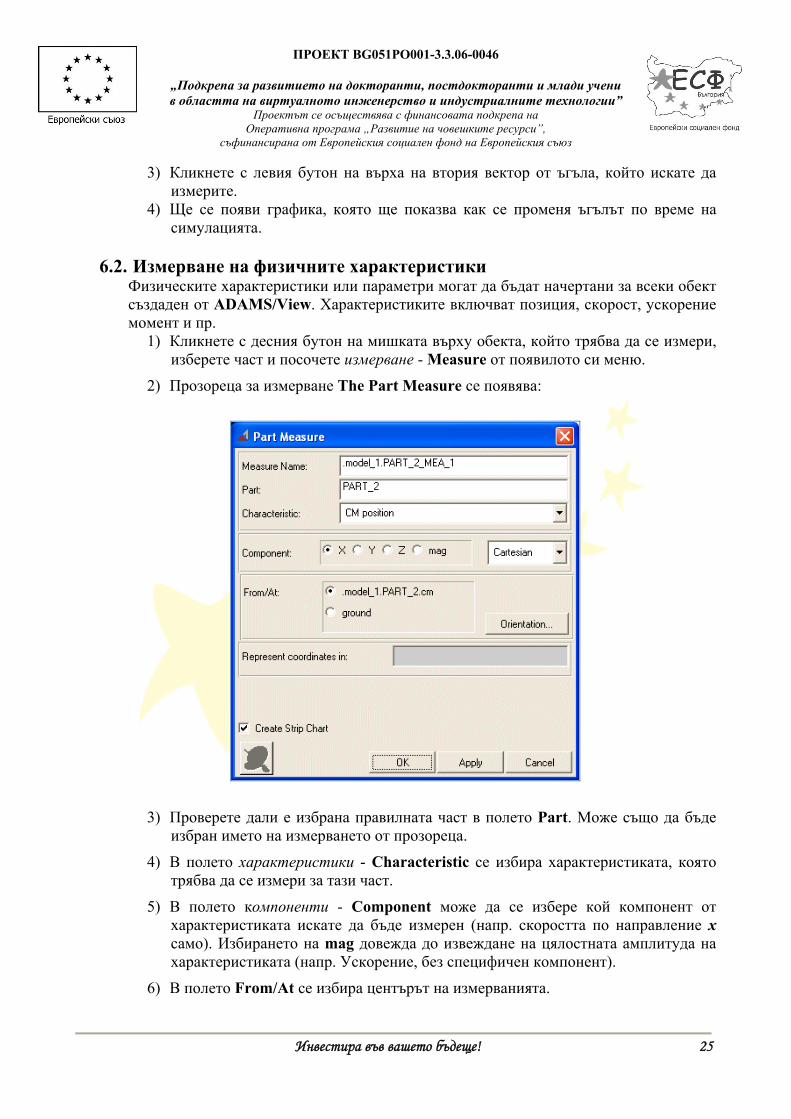
2) Прозореца за измерване The Part Measure се появява:
3) Проверете дали е избрана правилната част в полето Part. Може също да бъде избран името на измерването от прозореца.
4) В полето характеристики - Characteristic се избира характеристиката, която трябва да се измери за тази част.
5) В полето компоненти - Component може да се избере кой компонент от характеристиката искате да бъде измерен (напр. скоростта по направление x само). Избирането на mag довежда до извеждане на цялостната амплитуда на характеристиката (напр. Ускорение, без специфичен компонент).
6) В полето From/At се избира центърът на измерванията.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
26 Инвестира във вашето бъдеще!
7) Изберете OK и графиката ще се появи в прозореца на ADAMS/View, подобно на показаното:
6.3. Създаване на чертежи от измерванията ADAMS/View може да създава пълни графики от направените измервания. За да направите това, трябва:
1) Кликнете с десния клавиш на мишката в празно място на произволен прозорец за измерване.
2) Изберете графиката чрез клик върху Transfer to Full Plot
3) Появява се графика в пълен мащаб:
4) Опитайте кликване в различни точки на графиката, за да видите различните възможности, който се предлагат. Възможно е да се променят минималните и максималните стойности, надписите и означенията върху графиката преди да се разпечата.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 27
5) Графиката може да бъде разпечатана директно от екрана, чрез избиране на
икона print .
6) Промените в стойността на измерваната променлива могат да бъдат следени
чрез избиране на иконата за чертаене на промените - plot tracking . Сканиране на независимите променливи в ос x (както времето) и се получава съответната стойност на измерваната стойност на ос y както е показано:

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
28 Инвестира във вашето бъдеще!
7. РЕШЕНИ ПРИМЕРНИ ЗАДАЧИ: 7.1. Просто махало
ADAMS Labs: Просто махало (Pendulum)
Въведение:
Това ADAMS Lab лабораторно упражнение ще ви въведе в следните дейности и умения:
o Създаване на твърди тела o Създаване на връзки o Настройване и стартиране на симулации o Анализиране на резултати
Проблем:
AB е еднородно тяло – прът с маса 2 kg и дължина от 450mm. Тялото AB се люлее във вертикална равнина около точка A. Ъгловата скорост (theta точка )θ = 3 rad/s когато θ = 30 degrees. Изчислете опорната реакция в този момент.
Тази задача изисква да се определи опорната реакция на колебаещ се прът с тегло 2 kg в т. А в момент, когато ъгълът сключен с хоризонталата е θ = 30 degrees. Задачата ще бъде решена с използването на ADAMS за създаване на модел при зададените условия и получаване на резултати.
Процедура:
1.1. Стартиране на ADAMS.
1. От Windows, кликнете на Start Programs ADAMS 12.0 AView ADAMS – View

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 29
2. Ще се появи началния прозорец на ADAMS. 3. Под запитването "How would you like to proceed", изберете Create a new model -
Създаване на модел. 4. Проверете зададената стойността на земната гравитация в Earth Normal (Global Y). 5. Проверете използваните измерителни единици MMKS - mm,kg,N,s,deg. Изберете OK. 6. Преди да започнем, трябва да се променят настройките на координатната мрежа. Това
може да стане в менюто ADAMS/View Settings и избиране на Working Grid. Диалогът за настройки на Working Grid Settings се появява. Една от опциите, който трябва да променим е разстоянието - spacing, променете го на 25mm, кликнете след това на OK. Това позволява да се променят останалите възможности на работната мрежа grid settings, такива като дименсия и изглед. Тук може да се превключва в полярна координатна система, удобна за измерване на ъгли.
Фигура 1. Welcome to ADAMS.
1.2. Създаване на звеното.
1. Кликнете на палетата с инструменти с десния бутон на мишката. Бутона за множеството на звената(детайлите) ще се появи.
2. Изберете връзката за твърдо тяло Rigid Body: Link tool. с левия бутон на мишката.
3. В свързващия контейнер на дъното на Инструментариума, активирайте опцията за дължина Length toggle switch и въведете 450mm в текстовото поле отдолу.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
30 Инвестира във вашето бъдеще!
4. Активирайте опцията за ширина Width toggle switch и въведете 20mm в текстовото поле.
5. Активирайте опцията за ширина Depth toggle switch и въведете 27.5mm в текстовото поле.
6. Кликнете веднъж с левия бутон на мишката върху точката (-225,0,0) за да изберете начална точка starting point (за да видите координатите натиснете F4) и кликнете веднъж с левия бутон на мишката в произволно място вдясно от стартовата точка по дължината на абсцисата global x-axis за да изберете направлението. ADAMS ще създаде и е покаже звеното. На екрана ще се появи нещо подобно на това на Фигура 2 отдолу.
Фигура 2. Link
1.3 Задаване на масата на звеното.
Зададената задача изисква масата на звеното (пръта) да 2 kg. ADAMS автоматично изчислява масата на звената на базата на материала и геометрията на детайла, но в този случай масата може да бъде зададена ръчно, тъй като тя фигурира в началното условие на задачата.
1. Кликнете на звеното с десния бутон. Последвайте падащото меню за част Part:PART_2 и изберете промяна Modify.
Диалогът за модифициране на твърдо тяло Rigid Body ще се появи.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 31
2. В графата дефиниране на масата чрез Define Mass By: въведете чрез стрелката за движение надолу избор на ползвателя User Input.
3. В полето за маса Mass –текстовото поле в диалога за модификация Modify dialog box, напишете 2.0 и натиснете OK.
Масата на звеното ще бъде зададена на 2 kg.
Забележка: Поради това че геометричните параметри вече са зададени , масата вече е зададена със стойност близка до 2 kg, така че можем да приемем инерционните параметри без да ги променяме.
1.4. Задаване на началното положение на звеното (пръта).
1. За да зададете ъгъла на звеното на стойност 30 degrees, кликнете на иконата за
позиция Position icon в инструментариума. 2. Въведете 30 в полето ъгъл Angle и изберете звеното така че то да се засвети. 3. Кликнете веднъж върху стрелката за посока по часовниковата стрелка clockwise.
Звеното ще се установи на ъгъл от хоризонталата 30 degree.
1.5. Създаване на окачването.
1. Кликнете на иконата за връзки Joint в основния инструментариум и изберете въртяща
връзка Joint:Revolute от набора за връзки. 2. Проверете, че в текста в полета за конструкция Construction пише 1 Location и
Normal to Grid. 3. Позиционирайте курсора върху маркера PART_2 MARKER_1 в левия край на
звеното и кликнете веднъж с левия бутон на мишката. 4. Въртящата връзка ще се появи между звеното и корпуса на това място.
1.6. Задаване на начално движение.
Създадени са всичките звена и са въведени всичките ограничения. Следващата стъпка е да се зададе начална движение на въртящата връзка, която описва началната ъглова скорост като 3 radians per second.
1. Кликнете върху звеното, задръжте бутона и последвайте падащото меню за детайл 2 Part:PART_2 и изберете промени Modify.
2. В клетката категория Category: използвайте падащото меню за да изберете начална скорост и състояние Velocity Initial Conditions.
3. В графата ъглова скорост Angular velocity about:, изберете Part CM. 4. Под него, кликнете върху ос Z axis клетка и въведете 3.0r, за желаните 3.0 radians per
second, в текстовото поле, появило се до него. 5. Кликнете върху бутона приложи Apply и затворете прозореца.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
32 Инвестира във вашето бъдеще!
6. Кликнете върху бутона Ok в прозореца за промяна Modify.
1.7. Проверка на модела.
Проверката на модела е един от начините да се намерят грешки, ако те съществуват, в дефинирания модел. ADAMS проверява за възможни грешки от вида на несъвпадащи връзки, звена без геометрични ограничения, или недефинирани маси в динамичните системи, и предупреждава за други възможни проблеми в модела.
1. Кликнете на информационна икона Information , разположената в долния десен ъгъл на моделния прозорец, с десния бутон на мишката.
Появява се информационната таблица.
Кликнете върху иконата за проверка - Verification.
Появява се информационния - Info Window прозорец.
2. След появата на съобщението за успешно извършена проверка, кликнете на бутона за затваряне Close в горния десен ъгъл за да затворите информационния прозорец.
Завършеният модел трябва да се появи по начин подобен на Фигура 3 по надолу:

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 33
Фигура 3. Completed pendulum model.
Изграждането на модела е завършено.
Настройване и стартиране на симулацията.
1.8. Задаване на измерване на силата в опорния щифт в точка A.
1. Кликнете на въртящата връзка в горния край на пръта с десния бутон на мишката и проследете падащото меню за Joint:JOINT_1 и изберете измерване - Measure. Диалогът за измерване във връзката - Joint Measure се появява.
2. Изберете сила - Force за характеристика - Characteristic и - mag (magnitude) за компонент Component.
3. Натиснете за край OK. Появява се прозорец с име ed JOINT_1_MEA_1. Това е мястото където реакцията в опората ще се появява по времена симулацията и анимацията.
1.9. Стартиране на симулацията.
1. Кликнете върху иконата за симулация в инструментариума - Toolbox. За крайно време на симулацията - End Time, въведете 0.5 и за стъпка - Steps, въведете 50.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
34 Инвестира във вашето бъдеще!
2. Кликнете върху иконата за възпроизвеждане – Play .
Трябва да видите как пръта от модела се люлее около точката на окачване и съответните данни от резултатите ще бъдат изобразени на графиката - JOINT_1_MEA_1.
3. Когато симулацията завърши, кликнете на иконата за връщане в началото - Rewind
.
1.10. Намиране на опорната реакция.
1. Кликнете на празното място в малкия графичен прозорец с десния бутон на мишката и проследете падащото меню. Изберете – пренасяне към пълния чертеж - Transfer to Full Plot.
Прозореца за чертеж - ADAMS Plot Window ще се отвори, замествайки моделния прозорец.
2. След това идете в чертожния прозорец и изберете изобразяване - Plot Tracking .
Тъй като знаем началните условия на симулацията можем да преместим курсора в стартовата точка на чертежа.
3. В горната част на прозореца, резултатът по X ще бъде показан като 0 и този по Y, който се явява силата в окачването, ще се появи. Това е отговорът (показан на Фигура 4).
Сравнението на резултатите е дадено в секцията Теоретично решение на това лабораторно упражнение.
4. За да се върнете към моделния прозорец, идете на падащото меню на File и изберете Затваряне на чертожния прозорец - Close Plot Window .
1.11. Записване на сесията с изграждане на модела.
1. При падащото меню на File , изберете запазване като - Save Database As...
Диалогът за запазване - Save Database As се появява в форма показана на Фигура X.
2. В текстовото поле до име на файла - File Name, въведете желаното име за модела, например - pendulum.
3. Изберете OK за край.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 35
Създава се ADAMS Binary File.
1.12. Изход от ADAMS.
1. Изберете изход - Exit от падащото меню на File в основния прозорец на ADAMS Modeling.
Поздравления, Вие завършихте лабораторно упражнение махало - ADAMS Lab: Pendulum.
Теоретично решение:
• Теоретичната стойност на силата в окачването на пръта в точка A е 14.5 N.
• Резултатите от симулацията с ADAMS са: Опорна реакция в точка A = 14.539N
Фигура 4. Displayed results

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
36 Инвестира във вашето бъдеще!
Имате проблеми?
Ако инструкциите са спазени коректно, вашият ADAMS резултат ще бъде същият като посочения по горе. Съвпадението с теоретичния резултат може да бъде подобрено чрез намаляване на допуска на грешката и последващо преизчисляване с числа с по голяма точност(повече цифри след десетичната запетая). Ако все пак не сте получили резултата:
• Уверете се че са зададени коректните единици за измерване - mmks. • Уверете се че гравитацията е включена - on и е насочена в направление - Y и
стойността � е зададена - 9806.15. • Уверете се че въртящата връзка е в направление на оста - z. • Проверете размерите на детайла - dimensions за да се уверите че са точните размери. • Проверете стойностите на масата - mass properties за да се уверите че са точни. • Проверете ориентацията на тялото - orientation за да сте сигурни че е точната. • Уверете се че измерването е настроено на амплитудата – magnitude – на опорната
реакция. • Уверете се че чертежа показва коректния параметър на желания резултат.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 37
7.2. Гърбица
ADAMS Lab: Гърбица
(Cam)
Въведение:
Това лабораторно упражнение ще ви създаде следните умения:
o Създаване на твърди тела o Създаване на сплайн повърхности o Създаване на връзки и контактни условия o Настройване на симулацията o Анализиране на резултатите
Задача:
Гърбичният механизъм, който трябва да бъде създаден, анимиран и начертан е показан на фигурата. Модела съдържа 3 звена (включително корпуса), 1 въртяща връзка, 1 транслационна връзка, 1 движение и няколко маркера.
ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
38 Инвестира във вашето бъдеще!
Процедура:
1.1. Стартиране на ADAMS.
1. От Windows, кликнете на Start Programs ADAMS 12.0 AView ADAMS – View
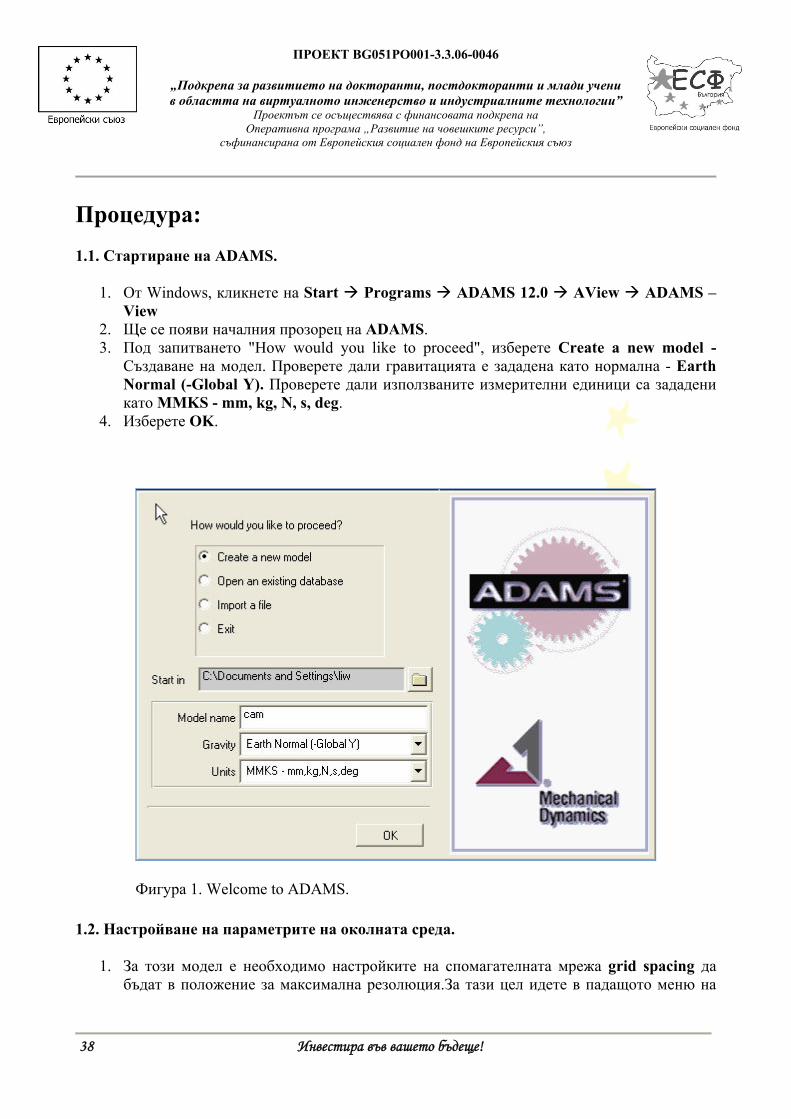
2. Ще се появи началния прозорец на ADAMS. 3. Под запитването "How would you like to proceed", изберете Create a new model -
Създаване на модел. Проверете дали гравитацията е зададена като нормална - Earth Normal (-Global Y). Проверете дали използваните измерителни единици са зададени като MMKS - mm, kg, N, s, deg.
4. Изберете OK.
Фигура 1. Welcome to ADAMS.
1.2. Настройване на параметрите на околната среда.
1. За този модел е необходимо настройките на спомагателната мрежа grid spacing да бъдат в положение за максимална резолюция.За тази цел идете в падащото меню на

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 39
настройки - Settings в горната част на прозореца на ADAMS и изберете работна мрежа - Working Grid...
2. В полето за разстояние - Spacing въведете 10mm едновременно в графите за X и Y. 3. Кликнете OK. Разстоянието между точките ще бъде променено на 10mm.
Фигура 2. Working grid settings.
3. Кликнете на икона за избор - Select
Визуализира се контролния - View Control panel панел в инструментариума - Toolbox.
4. Кликнете върху иконата за промяна на размера - Dynamic Zoom . След това кликнете и задръжте левия бутон на мишката на произволно място в моделния прозорец - Modeling window. За увеличение на размера предвижвате мишката нагоре, а за намаляване - надолу.
1.3. Дефиниране на детайлите от гърбичния механизъм.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
40 Инвестира във вашето бъдеще!
1. Превключете на основния прозорец - main view window. Извикайте координатния прозорец - coordinate window чрез бутона F4 за да следите координатите на позицията на мишката.
Фигура 3. Coordinate.
2. Кликнете на набора с визуални атрибути за детайли- parts palette в инструментариума - Toolbox с десния бутон на мишката. Появява се набора с детайлиon.
3. Кликнете върху иконата за сплайн повърхности - Spline с левия бутон на мишката.
4. В долната част на инструментариума проверете дали в текстовото поле пише нов детайл - New Part. Кликнете в полето близо до надписа затворен - Closed за да изберете затворена крива на сплайна.
5. Сега кликнете с левия бутон на мишката на всяка една от точките в долната таблица.
Points 1 2 3 4 5 6 7 8 9 10 11 12 13
X 0 -50 -70 -80 -70 -50 0 50 70 80 70 50 0
Y 0 -30 -70 -120 -160 -180 -190 -180 -160 -120 -70 -30 0
Z 0 0 0 0 0 0 0 0 0 0 0 0 0
6. Обърнете внимание на това първата и последната точка да бъдат с еднакви координати за да бъде затворен сплайна.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 41
7. След като са избрани 13 точки, кликнете с десния бутон, за да създадете затворена сплайнова повърхност. Ще се появи поле с напомняне за това, че детайла няма маса. Затворете това поле.
Ще бъде създадена гърбица, както е показана на илюстрацията на Фигура 4.
Ако вашият детайл не съответства геометрически на илюстрацията, той може да бъде коригиран чрез кликване и придърпване на специфичните точки - "hot points" (правоъгълните полета) до правилното положение.
Фигура 4. Closed spline.
1.4. Създаване на въртяща връзка.
1. Кликнете върху иконата за връзки - Joint в инструментариума - Toolbox и изберете
въртяща връзка - Joint:Revolute от набора бутони за връзки.(fig 07) 2. Уверете се, че текста в полето конструкции - Construction гласи 1 Location и Normal
to Grid. 3. Поставете курсора на мрежова точка (0,-130,0) и кликнете веднъж с левия бутон на
мишката.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
42 Инвестира във вашето бъдеще!
4. Ще бъде създадена въртяща връзка между гърбицата и корпуса в тази точка, така както е илюстрирано на Фигура 5.
Фигура 5. Revolute joint.
1.5. Създаване на изпълнителното звено.
Изпълнителното звено е композирано от два геометрични елемента: отворена сплайнова повърхнина и затваряща повърхнина.
Създаване на отворена сплайнова повърхнина:
1. Изберете иконата за сплайн - Spline . 2. Уверете се, че в долната част на инструментариума не е избрано условието за
затворен контур - Closed тъй като ще се създава отворен такъв. 3. След това кликнете с левия бутон на мишката на всяка от 11-те точки от долната
таблица.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 43
Points 1 2 3 4 5 6 7 8 9 10 11
X -250 -200 -150 -100 -50 0 50 100 150 200 250
Y 50 40 40 30 10 0 10 30 40 40 50
Z 0 0 0 0 0 0 0 0 0 0 0
4. След като са избрани единадесетте точки, кликнете веднъж с десния бутон на мишката, за да създадете отворен сплайн. Ще се появи предупреждение за липса на обем на вашия детайл. Затворете съобщението. Отворения сплайн ще изглежда както на Фигура 6. Отново, за модификация на геометрията, могат да се използват горещите точки - "hot points".
Фигура 6. Open spline.
Създаване на елемент със затворен контур- box element:
5. От набора с бутони за твърдо тяло - Rigid Body: изберете инструмента Box . 6. В падащото меню на нов детайл - New, изберете възможността Add to Part. 7. Кликнете на отворен сплайн - open spline в прозореца на ADAMS за да изберете
детайл за добавяне.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
44 Инвестира във вашето бъдеще!
8. Сега дефинирайте ъглите на кутията - box. Разположете курсора в левия край на отворения сплайн (-250,50,0).
9. Кликнете и издърпайте нагоре и надясно докато горния десен ъгъл има координати (250,180,0). Отпуснете бутона на мишката.
Елемента със затворен контур е създаден, както е показан Фигура 7.
Фигура 7. Box element.
1.6. Добавяне на транслационна връзка - Translational Joint.
Следва създаване на транслационна връзка - translational joint между изпълнителното звено и корпуса с ос на транслация съвпадаща с глобалната ордината y.
1. Кликнете върху иконата за присъединяване - Joint в инструментариума - Toolbox с десния бутон на мишката. Появява се набора бутони за присъединяване.
2. Изберете връзка, транслационна - Joint:Translational . 3. Уверете се, че в текстовото поле на конструкции - Construction пише 1 Location и
Pick Feature. 4. Разположете курсора в точка с координати (0,160,0) и кликнете веднъж с левия бутон
на мишката . Това е мястото, където ще бъде разположена връзката.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 45
5. След това движете курсора в направление на оста Y докато се появи стрелка посочваща направлението. Уверете се че стрелката е успоредна на оста Y . Тази ос определя направлението на транслация на връзката . Кликнете с левия бутон на мишката за край.
6. Създадена е връзка между изпълнителното звено и корпуса, както е показана на Фигура 8.
Фигура 8. Translational joint.
1.7. Добавяне на контурни връзки - Curve-Curve Constraint.
1. Кликнете на иконата връзка - Joint в инструментариума - Toolbox и изберете гърбица
с контурна връзка - Cam (curve-on-curve) contact от набора за връзки. 2. Кликнете върху гърбицата и след това кликнете върху частта със сплайн от
изпълнителното звено. Контурна връзка е създадена и е изобразена както Фигура 9.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
46 Инвестира във вашето бъдеще!
Фигура 9. Curve-curve contact.
1.8. Дефиниране на ограничение на движението – Creating a Motion Constraint.
Вече всички детайли са създадени и добавени ограниченията от конструкцията. Следващата стъпка е да се добави въртеливо движение на въртящата връзка което описва константна ъглова скорост на гърбицата.
1. Изберете въртеливо движение - Rotational Joint Motion от инструментариума - Toolbox.
2. В текстовото поле близко до скорост - Speed въведете 360d за да зададете ъглова скорост от 360 градуса за секунда - degrees per second.
3. Кликнете на въртящата връзка в частта с гърбицата с левия бутон на мишката. Голяма стрелка изобразяваща движението се появява около връзката, по начин показан на Фигура 10.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 47
Фигура 10. Rotational Joint Motion.
1.9. Проверка на модела - Verify the model.
Проверката на модела е един от начините да се намерят грешки, ако те съществуват, в дефинирания модел. ADAMS проверява за възможни грешки от вида на несъвпадащи връзки, звена без геометрични ограничения, или недефинирани маси в динамичните системи, и предупреждава за други възможни проблеми в модела.
1. Кликнете върху иконата информация - Information в долния десен ъгъл на моделния
прозорец с десния бутон на мишката. Информационния набор ще се появи.
2. Кликнете с десния бутон на информация - , след това на проверка - Verification
. Два прозореца - Info Window ще се появят, както е показано на Фигура 11. 3. След поява на съобщението, че моделът е успешно проверен, натиснете бутона за
затваряне - Close в горния десен ъгъл на информационния прозорец - Information Window.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
48 Инвестира във вашето бъдеще!
Фигура 11. Verify model.
Пълният модел трябва да изглежда както на фигурата отдолу:

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 49
Моделът е завършен напълно.
Настройване и стартиране на симулацията.
1.10. Задаване на измерваните параметри.
1. Изберете изпълнителното звено чрез клик с левия бутон на мишката в основния прозорец на ADAMS - Modeling window. Детайла ще се засвети.
2. Кликнете с десния бутон на изпълнителното звено и изберете измерване - measure. Диалогът за измерване във връзката - Joint Measure се появява.
3. Изберете CM Position за текст в Characteristic и изберете Y за компонент - Component измерване на преместване в направление Y.
4. Натиснете приложи - Apply. Ще се появи графично поле. В него ще се изобразяват данните.
5. След това повторете процедурата избирайки CM Velocity за Characteristic. 6. Повторете още веднъж цялата процедура за CM Acceleration. Всеки път ще се
появява нов графичен прозорец за новото измерване. 7. След създаване на трите графични прозореца, кликнете на Cancel за да затворите
диалогът за измерване - Part Measure dialog box.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
50 Инвестира във вашето бъдеще!
Фигура 12. Measure of follower.
1.11. Стартиране на симулацията.
1. Кликнете на иконата за симулация - Simulation в инструментариума - Toolbox. За крайно време - End Time, въведете 1 и за стъпки - Steps, въведете 50.
2. Кликнете на иконата за възпроизвеждане - Play . Трябва да видите гърбицата да се върти около въртящата връзка и изпълнителното звено да се плъзга по посока на транслационната връзка. Съответните данни ще бъдат изобразени в съответната графика.
3. Когато симулацията свърши можете да върнете процеса в началото чрез клик върху
иконата Rewind.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 51
Фигура 12. Simulation results.
1.12. Изобразяване на резултатите.
1. Във всеки графичен прозорец има графика съответстваща на измерваните величини определени в началото.
2. За да видите графиката по подробно необходимо да кликнете вътре в малкия чертожен прозорец с десния бутон на мишката и да последвате падащото меню. Изберете пълна картина - Transfer to Full Plot. Прозорецът с графика - ADAMS Plot Window ще се отвори, замествайки моделния прозорец. За да се върнете в моделния прозорец идете в падащото меню на File и изберете връщане - Return to Modeling.
1.13. Запазване на моделиращата сесия.
1. От падащото меню на File, изберете Save Database As...Диалогът Save Database As ще се появи както е показано на Фигура 13.
2. В текстовото поле до File Name, въведете желаното име на модела. 3. Изберете OK. ADAMS Binary File ще бъде създаден.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
52 Инвестира във вашето бъдеще!
Фигура 13. Save Database As...
1.14. Изход от ADAMS.
1. Изберете Exit от падащото меню File на моделния прозорец на ADAMS.
Поздравления, Вие завършихте лабораторното упражнение ADAMS Lab: Cam.
Имате проблеми?
Ако инструкциите са спазени коректно, вашият ADAMS резултат ще бъде същият като посочения по горе. Съвпадението с теоретичния резултат може да бъде подобрено чрез намаляване на допуска на грешката и последващо преизчисляване с числа с по голяма точност(повече цифри след десетичната запетая). Ако все пак не сте получили резултата:
• Уверете се че са зададени коректните единици за измерване - mmks. • Уверете се че въртящата връзка е в направление на оста - z. • Уверете се че направлението на транслация във връзката е в направление на оста - y. • Проверете размерите на детайлите - dimensions за да се уверите че са точните
размери. • Проверете стойностите на точките от сплайна за да се уверите че са точни. • Проверете ориентацията на телата - orientation за да сте сигурни че е точната. • Уверете се че измерването е настроено на необходимите параметри. • Уверете се че чертежа показва коректния параметър на желания резултат.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 53
7.3. ADAMS Lab: Crank Slider – Клатеща се кулиса
Problem:
Pin A moves in a circle of 90-mm radius as crank AC revolves at a constant rate ⎥⎦⎤
⎢⎣⎡=
sekrad60β . The
slotted link rotates about point O as the rod attached to A moves in and out of the slot. For the position [ ]deg30=β , determine r , r , θ , θ .
This problem asks for the translational speed and acceleration of the slider rod and the angular speed and acceleration of the slider assembly at a given crank angle of 30 degrees and crank angular velocity of 60 radians per second. To solve this, we will build an ADAMS model of the crank and slider assembly based on the information given and measure the data we want to use an ADAMS simulation of the model.
Procedure:
This ADAMS model will be created in the following steps:

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
54 Инвестира във вашето бъдеще!
1.1. Starting ADAMS.
1.2 Setting up the modeling environment
2.1 Creating the Crank Part (AC)
2.2 Creating the Cylinder Part
2.3 Creating the Piston Part
2.4 Creating the Revolute Joints

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 55
2.5 Creating a translational joint
2.6 Setting the initial velocity of the crank (AC)
3.1 Simulating the Model
3.2 Measuring ( r , r , θ , θ )

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
56 Инвестира във вашето бъдеще!
7.4. ADAMS Labs: Slider Mechanism - Елипсографен механизъм Simulation I: 1. The angular velocity of the bar AB when degree 2. x- and y- components of reaction force at joint A Simulation II: A constant force of 4000 N pointing to the left is applied on the piston on the horizontal plane. Redo the simulation for questions 1 and 2 in Simulation I.
Figure 1. The slider mechanism
Solution: The printout of the model is given in Figure 2.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 57
Figure 2. The model printout of the slider-mechanism

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
58 Инвестира във вашето бъдеще!
8. ЗАДАНИЯ ЗА УПРАЖНЕНИЕ
8.1. Double pendulum modeling robot - Робот PUMA
Having simulated a simple pendulum in Assignments 1 and 2, we will now consider a double pendulum. Often used as a simple but effective model for robots (such as one shown in Figure 1), a double pendulum consists of two rigid bars, which are connected to each other by a revolute joint (i.e., hinge) with one of the free ends attached to the base, also by a revolute joint (Figure 2).
In Figure 2, the bar OA is attached to the base at O, and to the bar AB at A, by frictionless revolute joints. The bars have identical dimensions of 500 mm × 25 mm × 25 mm and a uniform density of 2.7×103 kg/m3. They lie in a vertical plane, and are initially at rest with and . An external torque of 8000 N⋅mm is applied to the bar OA at the joint O, and an external torque of 2800 N⋅mm is applied to the bar AB at A. Perform a simulation of the double pendulum.
1. Submit a printout of your model (front view, at t = 0).
2. Plot , , and , and as a function of time (termination time t=0.6 s).
3. Plot , , and as a function of time (termination time t=0.6 s).

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 59
Figure 1. (a) The Puma robot; and (b) a double pendulum representing the robot.
Hint: Make sure you apply the torques to proper bars at the joint locations.
Solution: For Assignment 3, I won’t develop the detailed button-to-button solutions. Instead, I give the solution plot and the solution model. You can download the model at the end of the sheet and check it with your results.
1. The printout of the model

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
60 Инвестира във вашето бъдеще!
8.2. Four-bar linkage – Шарнирен четиризвенник
In this assignment we will consider four-bar linkages. One of the most commonly used mechanisms, the four-bar linkage consists of three rigid links and a stationary ground link interconnected at their ends by frictionless revolute joints.
In the four-bar linkage shown in Figure 1, the bar OA (the drive crank), subjected to an external torque of 50 N⋅mm, rotates about the grounded joint O. This results in a general planar motion of the bar AB (the coupler), and a rotation of the bar BC (the driven crank) about the grounded joint C. The bars, with lengths as shown in the figure, have identical cross-sectional dimensions of 26 mm (measured in the motion plane) × 13 mm (along the joint axes), and are made of steel (density: 7.8×103 kg/m3). Initially, all bars are at rest with BC in the vertical position, and the point A having coordinates xA = -60 mm and yA = 80 mm in a stationary coordinate frame (You should place the coordinate origin at the joint O) as shown. Perform a simulation of the four-bar linkage.
1. Submit a printout of your model (isometric view, with all joints and the torque shown, at t = 0).
2. Plot the angular velocity and angular acceleration of bar AB as a function of time (termination time t = 1 s).
3. Plot the x- and y-components of the reaction force at joint O as a function of time (termination time t = 1 s).
Μ = 50 N⋅mm
Figure 1. A four-bar linkage.

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
Инвестира във вашето бъдеще! 61
Solution:
1. The isometric view of the model printout:
Figure 1. Isometric view of the model printout

ПРОЕКТ BG051PO001-3.3.06-0046
„Подкрепа за развитието на докторанти, постдокторанти и млади учени в областта на виртуалното инженерство и индустриалните технологии”
Проектът се осъществява с финансовата подкрепа на Оперативна програма „Развитие на човешките ресурси”,
съфинансирана от Европейския социален фонд на Европейския съюз
62 Инвестира във вашето бъдеще!
8.3. Slider Crank Mechanism - Коляно-мотовилков механизъм
Consider the slider-crank mechanism (Figure 1) consisting of two rigid links and a piston that are connected by frictionless revolute joints and constrained to move in the vertical plane. The piston, connected to bar AB at the center of mass B, slides on a frictionless horizontal plane. The bars and the piston, all made of steel (density: 7.8×103 kg/m3), have an identical thickness of 20 mm (measured along the joint axes). A constant torque of 100 N⋅mm is applied to the crank OA, which initially is at rest with = 30°. Perform the following simulations for 0 ≤ t ≤ 0.5 s (using the coordinate frame as shown, whose origin is at O).
1. Submit a printout of your model (front view, with all joints and the torque shown, at t = 0). 2. Compute and plot the crank’s angular position , velocity and acceleration as a
function of time. 3. Compute and plot the piston’s position , velocity and acceleration as a function of
time. 4. Compute and plot the x- and y-components of the reaction force at joint O as a function of
time.
Figure 1. A crank-slider mechanism
Solution: 1. The print of the model is shown in Figure 2
Figure 2. The model printout of the slider-crank mechanism





























