Embed Size (px)
DESCRIPTION
Presented at the 2009 Florida Center for Advanced Aero-Propulsion (FCAAP) Technical Symposium
Citation preview

Florida Center for Advanced Aero-Propulsion (FCAAP) – Annual Technical Symposium 2009
1
Active and Adaptive Control of Supersonic Flow Using High Bandwidth Pulsed Micro-actuators
John T Solomon, Alex Wiley, Rajan Kumar, Farrukh S Alvi
Florida Center for Advanced Aero-Propulsion (FCAAP) Advanced Aero Propulsion Lab, Florida State University, Tallahassee, FL 32310
[email protected], [email protected]
Abstract. Unsteady actuators with high amplitude response and tunable frequency are essential for the effective and efficient control of many high speed aerodynamic flow systems. The design, development, characterization and implementation of a novel high bandwidth micro fluidic actuator is described in this paper. The remarkable feature of this micro-actuator is its high momentum mean flow along with high amplitude and a high bandwidth unsteady component. First generation micro-actuators are designed and their performance is tested in controlling the highly unsteady impinging jet flow field of a supersonic jet. The results show that the impinging tones are completely eliminated with the actuation of these micro-actuators, whereas, new peaks at a frequency different from the actuation frequency and its harmonics are observed in the spectra, the occurrence of which need to be further explored.
Keywords: Pulsed microjets, flow control, supersonic flow, micro actuators
1. Introduction
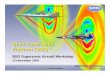
Need for high bandwidth, high amplitude, adaptable actuators for the control of shear and boundary layer supersonic flows have driven considerable research initiatives in the recent years. Use of efficient and effective actuators essentially leads to better and efficient operation of many practical aerodynamic systems. Aero-acoustic flow field generated by the impinging supersonic jets of a STOVL (Short Take Off and Vertical Landing) aircraft, during the hovering mode, is an example of such a flow domain that necessitates novel active control methods [1, 2]. Figure.1 shows a schematic of such a flow that produces highly unsteady aero-acoustic fields, governed by a well known feedback-resonance phenomenon. As seen in the figure, the instability waves in the jet that originate at the nozzle exit grow as they propagate downstream towards the impingement surface, and the acoustic waves that are produced upon impingement travel upstream and excite the nascent shear layer near the nozzle exit. Highly unsteady flow field experienced by the weapon/cargo bay of a military aircraft is another example that requires active flow
control approaches. These cavity shaped storage spaces of high speed air vehicles produce high amplitude pressure fluctuations that greatly affect the weapon trajectory dynamics and the stability of the vehicle [3, 4, 5 & 6]
Control schemes that have proved relatively successful in subsonic flows may not be ideal for the effective and efficient control of high speed flows. Although various types of actuators have been and are being explored, most designs have shown limitations either in terms of performance and range of operation in the lab or the ‘cost’ of performance (including added weight and complexity) for eventual full-scale implementation. There is a clear need for actuators that produce high-amplitude disturbances, over a broad range of frequencies.
Stand off shock
An Impinging jet
Nozzle
Shock cell
Large scale structures
Upward travelingwaves
Lift plate
Shear layer
Impinging surfaceStand off shock
An Impinging jet
Nozzle
Shock cell
Large scale structures
Upward travelingwaves
Lift plate
Shear layer
Impinging surface
Fig. 1: An impinging flow field of a supersonic jet that
requires active and adaptive control schemes.

Florida Center for Advanced Aero-Propulsion (FCAAP) – Annual Technical Symposium 2009
2
a b c d
Fig. 3 High amplitude fluid oscillations of source jet
Furthermore, the output of an ideal actuator should be ‘tunable’, both in terms of amplitude and frequency over a large dynamic range. This allows their use in subsonic and supersonic flow control applications where their properties can be adapted according to the specific applications and flight/operational regimes. In this paper we describe the development of a high bandwidth micro-actuator and its implementation in controlling resonance dominated supersonic impinging flows.
2. Micro actuator-Basic design
As discussed earlier, effective manipulation of high energy structures of the shear or boundary layer of high speed flows require aero-acoustic disturbances with high energy as well as momentum. An actuator with high amplitude excitation, whose frequency can be easily tuned over a large bandwidth, is essential for optimal active and adaptive control of various high speed flows characterized by large unsteadiness. To realize this goal, we have designed and developed an actuator system that can produce pulsed supersonic microjets at any desired range of frequencies. This micro actuator produces high amplitude response by using a very simple geometric configuration that leverages the natural resonance behavior of various components of this micro-fluidic actuator system.
A schematic of the actuator is shown in Figure 2. As seen here, the micro-actuator consists of three main components: a) an under expanded source jet, which
supplies the air into a cylindrical cavity, b) a cylindrical cavity upon which the source jet impinges, and c) multiple micro nozzles (i.e. microjet orifices) at the bottom of the cylindrical cavity, from which the high-momentum, unsteady microjets issue. In the present design, the source jet was issued from a 1mm diameter (dm) converging nozzle and the micro nozzles array at the bottom of the cavity consists of four 400 µm holes in the pattern shown in Figure 2. The cylindrical cavity has a diameter of 1.6 mm and length ‘L’, and is located at a distance ‘hm’ from the source jet.
The main parameters that govern the properties of the microjet array issuing from the actuator assembly are: a) the distance of cavity from the source jet hm, b) the length of the cylindrical cavity, L and c) the source jet pressure ratio, (NPR)m. The two geometric parameters are indicated in Figure 2. In the preliminary study, we examined the effect of these parameters on the
flow issuing from the microjet actuator to identify the optimal range and combination of these parameters that produce the desired micro-actuator flow. This has helped us to develop a preliminary design approach and scaling laws for such actuators.
dm
Nozzle
Impinging Cavity
Under expanded Source jet
L
hm
High band width secondary jet array
H=L+hm
Fig. 2: A schematic of the micro actuator
Source jet
Cavity
hm
L
Secondary jets

Florida Center for Advanced Aero-Propulsion (FCAAP) – Annual Technical Symposium 2009
3
Figure 3 shows representative schlieren images of the flow field associated with the micro-actuator. Large unsteadiness is seen in the source jet at certain combinations of geometric and flow parameters that essentially force and excite the natural resonant modes of the actuator system at high amplitudes. The flow field images given in Figure 3 corresponds to (h/d)m=1.3, L/dm=3 and (NPR)m=4.8. The secondary microjets are obviously supersonic, as evident from the shock cells present in the jet structure.
3. Characterization of actuators 3.1 Unsteady pressure spectra-Effect of geometry and flow
A 1 mm nozzle (dm), connected to a compressed nitrogen tank is used to generate source jet at various flow conditions. A Kulite unsteady pressure probe is placed close to the secondary orifices of the actuator to measure the unsteadiness associated with the secondary microjets. The unsteady pressure signals were acquired through high speed National Instruments digital data acquisition cards using LabviewTM. The transducer output was conditioned using a low-pass StanfordTM filter (cut-off frequency = 60 kHz) and sampled at 200 kHz. Standard FFT analysis was used to obtain narrowband pressure spectra. A total of 100 FFT’s of 4096 samples each were averaged in order to obtain statistically reliable narrowband spectra. Preliminary studies were conducted for different combinations of geometric and flow parameters such as L/dm, (h/d)m and (NPR)m.
In the present study, L/dm is varied from 1-5, (NPR)m from 1.9 to 5.8 and (h/d)m from 1 to 2. Figure 4 shows the representative spectra of secondary jets corresponding to L/dm = 5. For this case, experiments were carried out by varying (h/d)m for a fixed (NPR)m = 4.8 and by varying (NPR)m keeping a fixed (h/d)m =1.7.
a) Variation in (h/d)m b) Variation in (NPR)m
Fig. 4 Representative spectra of actuator for L/dm=5
The pressure spectra shown in Figure 4 clearly show the presence of high amplitude peaks indicating the
presence of highly unsteady flow issuing from the actuators. Here we see that for L/dm = 5, the control knobs, (h/d)m or (NPR)m variation produce high amplitude, unsteady microjets in the range of 6-11 kHz. Equally noteworthy is the trend of peak frequency variation, where a very small variation of (h/d)m, by ~600µm or a variation of ∆ (NPR)m~1.5 , leads to a significant shift in the peak frequency of ~5 kHz. Consequently, there is significant potential for developing a compact, robust, pulsed, tunable actuator with high mean and unsteady properties. This design approach allows for multiple ‘control knobs’ that can be used to modify the actuator properties in real time, as dictated by the application. As shown in Figure 4, the data from the parametric study is classified into two sets, one is the data derived from the (h/d)m variation (Figure 4a) and the other set reflect the effect of (NPR)m variation (Figure 4b). This grouping can then be used for understanding the overall behavior in terms of these parameters and for deriving a

Florida Center for Advanced Aero-Propulsion (FCAAP) – Annual Technical Symposium 2009
4
more general correlation that captures it; this is discussed in the following section. More details of the actuator characterization are available in reference [7, 8] Figure 5 summarizes the effect of (NPR)m and (h/d)m shown in Figure 4 but over a large range of cavity lengths, L/dm. As seen here, for a given actuator design, i.e. fixed L/dm, very small changes in the source jet distance and operating pressure allows one to sweep the output frequencies over a rather large range of ∆factuator = 5-20 kHz. However, this plot also shows a wide range of actuator frequencies can be produced for a given (h/d)m or (NPR)m, by varying L/dm. In order to better collapse the performance, in terms actuator dimensions, we define a new variable ‘H’ which is defined by ‘H=hm+L’, where hm is the distance of nozzle exit to the cavity entrance and L is the length of the cavity, as before. This parameter ‘H’ represents the length of the jet column from the micro-nozzle end to the impinging end of the cavity.
The actuator frequency is non dimensionalized using ideally expanded jet velocity of the under expanded source jet. The non dimensional frequency is given by
idealmideal UfdSt /= (1)
Fig. 5 Summary of actuator data7 Fig. 6 A correlation that predicts the actuator dynamics
In equation (1) f is frequency of the actuator, dm is source jet diameter and Uideal is the ideally expanded jet velocity of the under expanded source jet. The new parameter H is plotted against the non dimensional frequency Stideal as shown in Figure 6. Interestingly these new variables collapsed into a single trend curve as seen in the figure. The collapsed curve is approximated as an empirical correlation, represented by equation (2).
45.1)/(4.0 −= mideal dHSt (2) Equation (2) can be used as a guide for designing high bandwidth microactuators for various applications that demands high bandwidth actuation.
3.2Unsteady amplitude of the actuator
For an unsteady actuator system, the amplitude of unsteadiness is equally important as its frequency response. The total energy in the unsteady component of the micro-actuator flow can be captured by the rms of the total pressure measured, Prms, by the Kulite total pressure probe. In the following, we describe how the geometric and flow parameters affect the unsteady amplitude of the micro-actuator system.
Figure 7a shows the variation of Prms with (h/d)m for different cavity lengths. It is observed that Prms increases over a range of smaller values of (h/d)m and it remains nearly constant and decreases at larger values of (h/d)m. For example, for L/dm = 1, the Prms is 144dB at (h/d)m = 0.75 reaches nearly 168 dB at (h/d)m=1.1 and remains nearly constant up to (h/d)m=1.6 and falls down to 158 dB at higher (h/d)m values. As seen in Figure 7a, this entire variation occurs within an (h/d)m range of ~1 to 1.8 and is seen for all the cavity lengths examined. This suggests the existence of a region where the flow is particularly unsteady and where the instabilities are amplified, i.e, a region of

Florida Center for Advanced Aero-Propulsion (FCAAP) – Annual Technical Symposium 2009
5
instability. While discussing the pressure spectra of the micro-actuator flow (Figure 4a) we have seen the emergence of distinct frequency tones when (h/d)m is in the range ~1.3-1.8. In the preceding discussion, we noted high Prms, levels in the same h/d range. It is clear that the discrete peaks in the frequency spectrum, which are indicative of significant unsteadiness, are responsible for the high Prms. The conclusion is that for a fixed NPR, there exists a region of instability within which the variations of (h/d)m or H/dm give rise to high amplitude secondary jet fluctuations. Furthermore, the unstable frequencies can be controlled by selecting the appropriate (h/d)m and cavity length. The variation of Prms with nozzle pressure ratio (NPR) is shown in Figure 7b. In the present experiments, at a fixed value of L/dm and (h/d)m (corresponding to large unsteadiness), the NPR is varied from 4 to 5.5. It is observed that at each L/dm, with increase in (NPR)m (> 4.2) there is a sharp increase in OASPL, however its value saturates beyond NPR)m = 4.6 within the range tested.
a) Variation in (h/d)m b) Variation in (NPR)m
Fig. 7 Unsteady amplitude variation with actuator variables
Based on these studies and the scaling principles discussed above, an actuator system was designed and fabricated for controlling a supersonic impinging flow field generated in the Short Takeoff and Vertical Landing (STOVL) facility, at the Advanced Aero Propulsion Laboratory (AAPL) of Florida State University. 4. Implementation and testing of the actuator
The impinging flow field to be tested for the effectiveness of the high bandwidth actuator is generated by an ideally expanded supersonic jet, issued vertically through a Mach 1.5 C-D nozzle as shown in the Figure 8. Temperature is controlled using an inline heater which maintained a temperature ratio, TR=1.0 (where TR=stagnation temperature/ ambient temperature) for all experiments. To simulate the presence of an aircraft in hover, a circular plate (referred to as the lift plate) of diameter 10d (d= C-D nozzle throat diameter) is flush mounted with the nozzle exit. Four actuator modules that can generate 16 pulsed microjets were integrated in the lift plate around the periphery of the nozzle as shown in the Figure 8. These actuator modules are designed to generate microjets pulsing at 4-6 kHz at various NPR values of the actuator source jet. The micro actuators are designed for this frequency range so that they can be tuned to match the baseline frequency of the flow field. In this case the baseline has a dominant frequency component near 6 kHz. More design details of the actuator are available in [9].
For the present study, a 100psia Kulite (Model XCE-062-100A) was flush mounted in the ground plane at the stagnation point of impingement (r/d=0) to measure unsteady loads on the ground. A second 5psid Kulite (Model XCS-062-5D) was flush mounted in the lift plate at r/d=2 to measure the unsteady loads experienced by the aircraft. For near field acoustic measurements, a microphone at r/d=10 was mounted in plane of the nozzle exit (see Figure 8). All three measurements were recorded simultaneously.

Florida Center for Advanced Aero-Propulsion (FCAAP) – Annual Technical Symposium 2009
6
CD Nozzle
Lift Plate
h/d
High bandwidth Actuator integrated to the lift plate close to the nozzle exit
Ground Kulite
10d
Micro phone
Ground plane
10d
` Fig. 8 Schematic of test facility and actuator integration
The results shown in Figure 9 correspond to a nozzle-to-ground distance of h/d=4.5 where a dominant
impinging tone is generated at 5.3 kHz in the baseline flow. The control effects of the actuator, operating at (NPR)m=5.4 and 6.5, on the baseline flow are shown in Figure 9a & b respectively. At (NPR)m= 6.5, the microjets are pulsing at 5.3 kHz. It is important to note that the impinging tones are completely eliminated in both the cases. Also note that a new tone is generated at ~6.7kHz along with its harmonics, which is neither present in the base flow nor with the actuator. This needs to be investigated further. Although these new tones are of similar amplitude, they are narrower than the impinging tones resulting in lower energy content. This is reflected in overall sound pressure level (OASPL) reduction of ~4dB.
(a) Actuator operating at NPR=5.4 (b) Actuator operating at NPR=6.4 @ 5.3 kHz
Fig. 9 Spectra of impinging jet with and without control at h/d=4.5
One Actuator module
4 Actuator modules integrated to the lift plate at the nozzle exit.
Dime

Florida Center for Advanced Aero-Propulsion (FCAAP) – Annual Technical Symposium 2009
7
5. Conclusions and Future Work The design and development of a novel, simple and robust micro actuator is described in this paper. Our first generation actuator consists of a source microjet, under expanded into a short, cylindrical cavity and multiple secondary microjets emanate out of the cavity through multiple micro orifices. The remarkable feature of this micro-actuator is its high momentum mean flow along with high amplitude and a high bandwidth unsteady component. Based on a detailed parametric study and characterization, a suitable actuator system was fabricated and its performance was tested in controlling the highly unsteady impinging jet flow field of a supersonic jet. The results show that the impinging tones were completely eliminated with the activation of these micro-actuators, but, new peaks at a frequency different from the actuation frequency and its harmonics were observed in the spectra. These need to be further explored. The current design actuates only 30 % of the circumference of the main jet. Actuator modules that span a larger spatial extent, around the entire periphery of the main jet may further enhance control effectiveness. Also, we are in the process of integrating this actuator for controlling the flow field associated with other high speed applications.
Acknowledgments This work was supported by the Florida Center for Advanced Aero-Propulsion and AFOSR.
References
1. Lou, H., Alvi, F. S. and Shih, C., “Active and adaptive control of supersonic impinging jets,” AIAA Journal, Vol. 44, No. 1, 2006, pp.58-66.
2. Alvi, F. S., Shih, C., Elavarasan, R., Garg, G. and Krothapalli, A., “Control of supersonic impinging jet flows using supersonic microjets,” AIAA Journal, Vol. 41, No. 7, 2003, pp.1347-1355.
3. Ukeiley, L. Sheehan, M., Coiffet, F., Alvi, F. S., Arunajatesan, S. and Jansen, B.,“ Control of Pressure Loads in Geometrically Complex Cavities,” Journal of Aircraft, 45, No. 3., 2008, 1014-1024. Pre-print published as AIAA Paper 2007-1238.
4. Cattafesta, L. N., Williams, D., Rowely, C. and Alvi, F. S., “Review of Active Control of Flow-Induced Cavity Oscillations,” Progress in Aerospace Sciences, 44, 2008, 479–502.
5. Zhuang, N. Alvi, F. S. and Shih, “Another Look at Supersonic Cavity Flows and Their Control,” AIAA Paper 2005-2803, presented at 11th AIAA/CEAS Aeroacoustic Conference and Exhibit, Monterey, CA, June 2005.
6. Zhuang, N. Alvi, F. S., Alkilsar, M. and Shih, C., “Aeroacoustic Properties of Supersonic Cavity Flows and Their Control,” AIAA Journal, vol. 44, No. 9, Sept. 2006, pp. 2118-2128.
7. Solomon, T. J., Kumar, R. and Alvi, F. S. “High Bandwidth Micro-Actuators for Active flow control” AIAA paper 2008-3042.
8. Solomon, T. J., Kumar, R. and Alvi, F. S. “Development and characterization of high bandwidth actuator” ASME paper, 2008-3042.
9. Solomon, J.T., Hong, S., Wiley, A., Kumar, R., Annaswami, A.M., and Alvi, F. S. “ Control of supersonic resonant flows using high bandwidth Micro actuators” AIAA-2009-3742