-
8/14/2019 Action Theory Revision
1/28
Action Theory Revision
Ivan Jose Varzinczak
Abstract
Like any other logical theory, action theories in reasoning
about
actions may evolve, and thus need revision methods to
adequatelyaccommodate new information about the behavior of
actions. Herewe give a semantics that complies with minimal change
for revisingaction theories stated in a version ofPDL. We give
algorithms that areproven correct w.r.t. the semantics for those
theories that are modular.
Keywords: Reasoning about actions, PDL, revision, minimal
change.
1
-
8/14/2019 Action Theory Revision
2/28
Contents
1 Introduction 3
2 Logical Preliminaries 32.1 Action Theories in Dynamic Logic .
. . . . . . . . . . . . . . . 32.2 Elementary Atoms . . . . . . . .
. . . . . . . . . . . . . . . . 52.3 Prime Valuations . . . . . . .
. . . . . . . . . . . . . . . . . . 62.4 Closeness Between Models .
. . . . . . . . . . . . . . . . . . . 6
3 Semantics of Revision 73.1 Revising a Model by a Static Law .
. . . . . . . . . . . . . . . 7
3.2 Revising a Model by an Effect Law . . . . . . . . . . . . .
. . 93.3 Revising a Model by an Executability Law . . . . . . . . .
. . 103.4 Revising Sets of Models . . . . . . . . . . . . . . . . .
. . . . 13
4 Syntactic Operators for Revision 144.1 Revision by a Static
Law . . . . . . . . . . . . . . . . . . . . . 144.2 Revision by an
Effect Law . . . . . . . . . . . . . . . . . . . . 154.3 Revision
by an Executability Law . . . . . . . . . . . . . . . . 16
5 Correctness of the Algorithms 17
6 Conclusion and Perspectives 20
References 20
A Proof of Theorem 5.2 23
B Proof of Theorem 5.3 25
2
-
8/14/2019 Action Theory Revision
3/28
1 Introduction
In logic-based approaches to reasoning about actions, theories
are collec-tions of statements of the form: if context, then effect
after every executionof action (effect laws); and if precondition,
then action executable (exe-cutability laws). For example, in
Propositional Dynamic Logic (PDL) [5], onecould have the law (p1
p2) [a]p1, saying that in every context wherep1 p2 is the case,
after every execution of action a we get the effect p1;and (p1 p2)
a, stating that p1 p2 is a sufficient condition for
asexecutability.
These are examples of what we call action laws, as they specify
the be-havior of the actions of a given domain. Besides that we can
also have lawsmentioning no action at all (static laws). They
characterize the underlyingstructure of the world, i.e., its
possible states. For instance, having p1 p2as a static law would
mean p1 p2 is a forbidden state. Action theories willthen be
collections of laws, each of them seen as a global axiom in
PDL.
Well, it may happen that such descriptions have to be revised
due e.g. tonew incoming information about the behavior of the
world. In our example,we may learn that the only valid states are
those satisfying p1 p2, or thataction ahas always p2 as outcome in
p2-contexts, or even that p1 is enoughto guarantee as
executability. Here we are interested exactly in this kind of
theory change.The contributions of the present work are as
follows:
What is the semantics of revising an action theory Tby a law ?
Howto get minimal change, i.e., how to keep as much knowledge about
otherlaws as possible? We answer these questions in Section 3.
How to syntactically revise an action theory so that its result
corre-sponds to the intended semantics? We answer this question in
Sec-tions 4 and 5.
2 Logical Preliminaries
2.1 Action Theories in Dynamic Logic
Our base formalism is PDL without the operator, which
essentially amountsto the multimodal logic Km [17]. Let Act= {a1,
a2, . . .} be the set of atomic
3
-
8/14/2019 Action Theory Revision
4/28
actions of a domain. To each a there is associated a modal
operator [a]. We
suppose our multimodal logic is independently axiomatized, i.e.,
the logic isa fusion and there is no interaction between the modal
operators [11, 12].
Prop = {p1, p2, . . .} denotes the set ofpropositional
constants, also knownas atoms or fluents. The set of literals is
Lit= {1, 2, . . .}, where each i iseither p or p, for some p Prop.
If = p, we identify with p. By ||we denote the atom in .
By , , . . . we denote Boolean formulas, examples of which are
p1 p2and p1 p2. Fml is the set of all Boolean formulas. A valuation
v is amaximally consistentset of literals. We denote v the fact
that vsatisfies. val() is the set of all valuations satisfying .
|=
CPLdenotes the classical
consequence relation, and Cn() is the set of all logical
consequences of inclassical propositional logic.With IP() we denote
the set of prime implicants [18, 14] of . By we
denote a prime implicant, and atm() is the set of atoms
occurring in . Forgiven and , abbreviates is a literal occurring in
.
We denote complex formulas (with modal operators) by , , . . . a
is thedual operator of [a], (a =def [a]). An example of a complex
formulais (p1 (p2 p3)) [a](p1 p3).
A PDL-model is a tuple M = W, R where W is a set of valuations,
andR maps action constants a to accessibility relations Ra W W.
Given a
model M,|=M
wp (p is true at world w of model M) if w p;
|=M
w[a] if
|=M
w
for every w s.t. (w, w) Ra; truth conditions for the other
connectives areas usual. By M we will denote a set
ofPDL-models.
M is a model of (noted |=M
) if and only if |=M
w for all w W. M
is a model of a set of formulas (noted |=M
) if and only if |=M
for every . is a consequence of the global axioms in all
PDL-models (noted
|=PDL
) if and only if for every M, if |=M
, then |=M
.
With PDL we can state laws describing the behavior of actions.
Followingthe tradition in the RAA community, we here distinguish
three types of them.
Static Laws A static lawis a formula Fml. It characterizes the
possiblestates of the world. The set of all static laws of a domain
is denoted by S.
Effect Laws An effect law for a is of the form [a], where ,
Fml.Effect laws relate an action to its effects, which can be
conditional. Theconsequent is the effect which always obtains when
a is executed in a statewhere the antecedent holds. If a is a
nondeterministic action, then is
4
-
8/14/2019 Action Theory Revision
5/28
typically a disjunction. If is inconsistent we have a special
kind of effect
law that we call an inexecutability law. For example, (p1 p2)
[a] saysthat acannot be executed (there is no a-transition) in p1
p2-contexts. Theset of effect laws of a domain is denoted by E.
Executability Laws An executability law for ahas the form a,
with Fml. It stipulates the context in which a is guaranteed to be
executable.(In PDL, the operator a is used to express
executability, a thus readsas execution is possible.) The set of
all executability laws of a domain isdenoted by X.
Action Theories T= S E X is an action theory.
Given an action a, Ea (resp. Xa) will denote the set of only
those effect(resp. executability) laws about a.
For the sake of clarity, we here abstract from the frame [15]
and rami-fication [3] problems, and assume Tcontains all frame
axioms (cf. [6] for acontraction approach within a solution to the
frame problem).
2.2 Elementary Atoms
Given Fml, E() denotes the elementary atoms actually occurring
in .For example, E(p1 (p1 p2)) = {p1, p2}. An atom p is essential
to if
and only if p E() for every such that |=CPL . For instance, p1
isessential to p1 (p1 p2). E!() will denote the essential atoms of
. (If is not contingent, i.e., it is a tautology or a
contradiction, then E!() = .)
For Fml, is the set of all Fml such that |=CPL
andE() E!(). For instance, p1 p2 / p1, as p1 |=CPLp1 p2 but E(p1
p2) E!(p1). We also have E() = E!(). Moreover whenever |=CPL
,E!() = E!() and also = .
Theorem 2.1 (Least atom-set theorem [16]) |=CPL
, and forevery s.t. |=
CPL , E() E().
The proof of this theorem is given in [16, 13] and we do not
state ithere. Thus for each Fml there is a unique least set of
elementary atomssuch that may equivalently be expressed using only
atoms from that set.1
Hence, Cn() = Cn().
1The dual notion (redundant atoms) is addressed in [7], with
similar purposes.
5
-
8/14/2019 Action Theory Revision
6/28
2.3 Prime Valuations
Given a valuation v, v v is a subvaluation. For W a set of
valuations, asubvaluation v satisfies Fml modulo W (noted v
W) if and only if
v for all v W such that v v. A subvaluation v essentially
satisfies
(modulo W), noted v!
W, if and only ifv
W and {|| : v} E!(). If
v!
W, we call v an essential subvaluation of (modulo W).
Definition 2.1 Let Fml and W be a set of valuations. v is a
prime
subvaluation of (modulo W) if and only if v !
W and there is no v
v s.t. v !
W.
Prime subvaluations of a formula are the weakest states of truth
inwhich is true. They are just another way of seeing prime
implicants of .By base(, W) we denote the set of all prime
subvaluations of modulo W.
Theorem 2.2 Let Fml and W be a set of valuations. Then for allw
W, w if and only if w
vbase(,W)
v.
Proof: Right to left direction is straightforward. For the left
to right di-rection, if w , then w . Let w w be the least subset of
w stillsatisfying . Clearly, w is a prime subvaluation of modulo W,
and thenbecause w
w , the result follows.
2.4 Closeness Between Models
The distance between two PDL-models will depend upon the
distance be-tween their sets of worlds and accessibility relations.
These will be based onsymmetric difference between sets, defined as
XY = (X\ Y) (Y \ X).
Definition 2.2 Let M = W, R. M = W, R is as close to M asM = W,
R, notedM M M, if and only if
either WW WW
or WW = WW and RR RR
In what follows we use this closeness to compare models
resulting fromthe semantical revision.
6
-
8/14/2019 Action Theory Revision
7/28
3 Semantics of Revision
Contrary to action theory contraction [20], where we want the
negation ofsome law to be satisfiable, in revision we want to make
a new law valid. Thismeans one has to eliminate all cases
satisfying its negation. This depicts theduality between revision
and contraction: whereas in the latter one invali-dates a formula
by making its negation satisfiable, in the former one makesa
formula valid by forcing its negation to be unsatisfiable prior to
adding thenew law to the theory.
The idea behind our semantics is as follows: we initially have a
set ofmodels M in which a given formula is (potentially) not valid,
i.e., is(possibly) not true in every model in M. In the result we
want to have onlymodels of. Adding -models to M is of no help.
Moreover, adding modelsmakes us to lose laws: the corresponding
theory would be more liberal.
One solution amounts to delete from M those models that are not
-models. Of course removing only some of them does not solve the
problem,we must delete every such a model. By doing that, all
resulting models willbe models of . (This corresponds to theory
expansion, when the resultingtheory is satisfiable.) However, if M
contains no model of, we will end upwith . Consequence: the
resulting theory is inconsistent. (This is the mainrevision
problem.) In this case the solution is to substitute each model M
inM by its nearest modificationM that makes true. This lets us to
keep as
close as possible to the original models we had. But, what if
for one modelin M there are several minimal (incomparable)
modifications of it validating? In that case we shall consider all
of them. The result will also be a listof models M, all being
models of.
Before defining revision of sets of models, we present what
modificationsof (individual) models are.
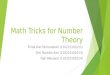
3.1 Revising a Model by a Static Law
Let the model depicted in Figure 1, and suppose we want to
revise it by the
Boolean formula p1 p2, i.e., we want such a formula to be a
static law.In such a model, we do not want the formula p1 p2 to be
satisfiable,
so the first step is to remove all worlds in which it is true.
The second stepis to guarantee that all the remaining worlds
satisfy the new law. Such anissue has been largely addressed in the
literature on propositional belief base
7
-
8/14/2019 Action Theory Revision
8/28
M :
p1,p2 p1, p2
p1,p2
a
aa
Figure 1: A model where p1 p2 is satisfiable.
revision and update [4, 21, 10, 7]. Here we can achieve that
with a semanticssimilar to that of classical operators: basically
one shall change the set ofpossible valuations, by removing or
adding worlds.
The delicate point in removing worlds is that we may lose some
executabil-ity laws: in the example, removing {p1, p2} also removes
p2 a. Froma semantical point of view, this is intuitive: if the
state of the world to whichwe could move is no longer possible,
then we do not have a transition tothat state anymore. Hence, if
that transition was the only one we had, it isnatural not to have a
transition anymore.
Similarly, one could ask what to do with the accessibility
relation ifnew worlds are added (when expansion is not possible):
shall new arrowsleave/arrive at the new world? If no arrow leaves
the new added world, wemay lose an executability. If some arrow
leaves it, we may lose an effect law,
the same holding if we add an arrow pointing to the new world.
If no arrowarrives at the new world, what about the intuition? Do
we want to have anunreachable state?
All this discussion shows how drastic a change in the static
laws maybe: it is a change in the underlying structure (possible
states) of the world!Besides their modification, changing them may
have as consequence the lossof an effect law or an executability
law.
The tradition in the RAA community says that executability laws
are, ingeneral, more difficult to state than effect laws, and hence
are more likely tobe incorrect. By adding no arrow to the resulting
model we here comply with
that and postpone correction of executability laws, if needed
(cf. [6, 20]). Itis controversial whether this approach is in line
with intuition or not, but wethink that with the information we
have at hand, this is the safest way ofchanging static laws.
The semantics for revision of one model by a static law is as
follows:
8
-
8/14/2019 Action Theory Revision
9/28
Definition 3.1 LetM = W, R. M = W, R M if and only if:
W = (W\ val()) val()
R R
Clearly |=M
for each M M . The minimal models resulting fromrevising a model
M by are those closest to M w.r.t. M:
Definition 3.2 revise(M, ) =
min{M, M}
3.2 Revising a Model by an Effect Law
Let our language have three atoms and consider the model M in
Figure 2.
M :
p1,p2,p3 p1, p2, p3
p1, p2,p3
aa
a
Figure 2: A model where p1 ap2 is satisfiable.
(Notice |=M
p2 p1 p3.) Suppose we want to revise M by p1 [a]p2.This means
that we should guarantee the formula p1 ap2 is satisfiable innone
of its worlds. To do that, we have to look at the worlds satisfying
it (ifany) and either
make p1 false; or
make ap2 false by removing a-arrows leading to p2-worlds.
In our example, the worlds {p1, p2, p3} and {p1, p2, p3} satisfy
p1 ap2 and both have to change. Flipping p1 would do the job but
also has asconsequence the loss of a static law: we would violate
p2 p1 p3. Here wethink that changing action laws should not have as
side effect a change in thestatic laws. Given their special status,
these should change only if explicitlyrequired. In this case, each
world satisfying p1 ap2 has to be changed
9
-
8/14/2019 Action Theory Revision
10/28
so that ap2 is no longer true in it. In our example, we should
remove the
arrows ({p1, p2, p3}, {p1, p2, p3}) and ({p1, p2, p3}, {p1, p2,
p3}).The semantics of one model revision for the case of a new
effect law is:
Definition 3.3 LetM = W, R. M = W, R M[a] if and only if:
W = W
R R
If (w, w) R \ R, then |=M
w and |=
M
w
|=M
[a]
The minimal models resulting from the revision of a model M by a
neweffect law are those that are closest to M w.r.t. M:
Definition 3.4 revise(M, [a]) =
min{M[a], M}
3.3 Revising a Model by an Executability Law
Let the model depicted in Figure 3 and suppose we want to revise
it by the
new executability law p1 a.
M :
p1, p2
p1,p2 p1, p2
p1,p2
a
a
a
Figure 3: A model where p1 [a] is satisfiable.
Observe that (p1 a) is satisfiable in M, hence we must throwp1
[a] away to ensure the new formula is true. To remove p1 [a] wehave
to look at all worlds satisfying it and modify M so that they no
longersatisfy the formula.
Given world {p1, p2}, we have two options:
10
-
8/14/2019 Action Theory Revision
11/28
change the interpretation of p1; or
add a new arrow leaving {p1, p2}.
A question that raises is what choice is more drastic: change a
world oran arrow ? Again, here we think that changing the worlds
content (thevaluation) is more drastic, as the existence of such a
world was foreseen bysome static law and is hence assumed to be as
it is, unless we have informationsupporting the contrary (cf.
Section 3.1). Thus we shall add a new a-arrowfrom {p1, p2}. Having
agreed on that, the issue now is: to which worldshould the new
arrow point? Four options show up: point the arrow to{p1, p2}, {p1,
p2}, {p1, p2} or {p1, p2} itself. The resulting model is
such that the unwanted formula is unsatisfiable and the new
executabilityp1 a holds in all its worlds.
Whereas all these options make the new law true in the resulting
model,not all of them comply with minimal change. To witness,
putting an a-arrow from {p1, p2} to {p1, p2} or {p1, p2} makes us
lose the effect lawp2 [a]p2; and pointing it to {p1, p2} deletes p1
[a]p1. Note that theselaws are preserved if we point the arrow to
{p1, p2}. What would supportthe choice for the latter?
When pointing a new arrow leaving a world w we want to preserve
asmany effects as we had before doing so. To achieve this, it is
enough to
preserve old effects only in w (because the remaining structure
of the modelremains unchanged after adding this new arrow). The
operation we mustcarry out is to observe what is true in w and in
the candidate target world w:
What changes from w to w (w \ w) must be what is obliged to do
so.
What does not change from w to w (w w) must be what is
eitherobliged or allowed to do so.
This means that every change outside what is forced to change is
not anintended one. In our example, when putting the a-arrow from
{p1, p2} to
{p1, p2}, p1 becomes a possible effect of a. As far as p1 is
never causedby a, there is no justification for having it in a
target world of {p1, p2}.Similarly, we want the literals preserved
in the target world to be at mostthose that either are consequences
of some effect or are usually preserved inthat context. Every
preservation outside those may make us lose some law.For instance,
when putting the new a-arrow from {p1, p2} to {p1, p2},
11
-
8/14/2019 Action Theory Revision
12/28
p2 is preserved. Because p2 is not a necessary effect of a and
is moreover
never preserved across as execution (in M), there is no reason
to preserveit in this a-transition.
This looks like prime implicants [18, 14], and that is where
prime subval-uations (see Section 2.3) play their role: the worlds
to which the new arrowshall point will be those whose difference
w.r.t. the departing world are liter-als that are relevant, and
whose similarity w.r.t. it are literals that we knowdo not
change.
Before giving a formal definition for that, we need to consider
two impor-tant issues: First, when checking satisfaction of these
two conditions, lookingjust at what is true in the model M we want
to modify is not enough. It
can be a model in which a contingent, i.e., not true in all
models formulais true. Hence we shall consider all the models in M.
Second, ifa is neverexecutable in w, i.e., Ra(w) = for every M = W,
R M, then lots ofeffects for a trivially hold in w, and then not
all of them should be takeninto account in deciding what has to be
changed or preserved. In this case,one should instead look at the
effects that hold for those worlds w such thatRa(w) = (because
everything that holds in these worlds also holds triviallyin those
worlds with no transition by a).
Definition 3.5 LetM = W, R be a model, w, w W, M a set of
modelssuch thatM M, and a an executability law. Thenw is
arelevanttarget world of w w.r.t. a forM in M if and only if:
|=M
w
If there is M = W, R M such that Ra(w) = :
for all w \ w, there is Fml s.t. there is v base(, W)
s.t. v w, v, and for everyMi M, |=Mi
w[a]
for all w w, either there is Fml s.t. there is v
base(, W) s.t. v w, v, and for allMi M, |=Mi
w[a]; or
there is Mi M s.t. |=Mi
w[a]
If Ra(w) = for everyM = W, R M:
for all w \ w, there is Mi = Wi, Ri M s.t. there isu, v Wi s.t.
(u, v) Ria and v \ u
12
-
8/14/2019 Action Theory Revision
13/28
for all w w, there is Mi = Wi, Ri M s.t. there is u, v
Wi s.t. (u, v) Ria and u v, or for allMi = Wi, Ri M,if (u, v)
Ria, then / v \ u
By RelTarget(w, a,M, M) we denote the set of all relevant
targetworlds of w w.r.t. a forM in M.
The semantics of model revision by a new executability law is
given by:
Definition 3.6 LetM = W, R. M = W, R Ma if and only if:
W = W
R R
If (w, w) R \ R, then w RelTarget(w, a,M, M)
|=M
a
The minimal models resulting from revising a model M by a new
exe-cutability law are those closest to M w.r.t. M:
Definition 3.7 revise(M, a) = min{Ma, M}
3.4 Revising Sets of Models
Now we are ready to define revision of a set of models M by a
new law :
Definition 3.8 LetM be a set of models and a law. Then
M =
M \ {M :|=
M}, if there is M M s.t. |=
M
MM revise(M, ), otherwise
Observe that Definition 3.8 comprises both expansion and
revision: in thefirst one, simple addition of the new law gives a
satisfiable theory; in thelatter a deeper change is needed to get
rid of inconsistency (see the motivatingdiscussion in the beginning
of Section 3).
13
-
8/14/2019 Action Theory Revision
14/28
4 Syntactic Operators for Revision
We now turn our attention to the syntactical counterpart of
revision. Supposethat we have an action theory Tand a formula we
want to revise Twith.If T {} is satisfiable, then adding to
T(expansion) will do the job.Otherwise, if T {} |=
PDL, then we have to modify the laws in T to
accommodate with the new incoming law (proper revision). Our
endeavorhere is to perform minimal change at the syntactical level.
By T we denotethe result of revising Twith .
4.1 Revision by a Static Law
Looking at the semantics of revision by Boolean formulas, we see
that revisingan action theory by a new static law may conflict with
the executability laws:some of them may be lost and thus have to be
changed as well. The approachhere is to preserve as many
executabilities as we can in the old possible states.Algorithm 1
deals with that (S denotes the classical revision of S by using any
method from the literature [21, 10, 7]).
Algorithm 1 Revision by a static lawinput: T, output: T
1: if T {} |=PDL then2: T:= T {}3: else4: S:= S , E:= E, X:= 5:
for all IP(S) do6: for all A atm() do7: A:=
piatm()
piA
pi
piatm()pi /A
pi
8: if S |=CPL
( A) then9: if S |=
CPL( A) then
10: if T |=PDL
( A) a and S, E, X |=
PDL
( A) then11: Xa
:= {(i A) a : i a Xa}12: else13: E:= E {( A) [a]}14: T:= S
E X
14
-
8/14/2019 Action Theory Revision
15/28
The basic idea is as follows: we look at each possible valuation
that is
common to the new S and the old one. Everytime an executability
used tohold in that state and no inexecutability holds there in the
new theory, wemake the action executable in such a context. For
those contexts not allowedby the old S, we make a inexecutable (see
Section 3.1).
4.2 Revision by an Effect Law
When revising a theory by a new effect law [a], we want to
eliminateall possible executions of a leading to -states. To
achieve that, we look atall -contexts and every time a transition
to some -context is not always
the case, i.e., T |=PDL a, we can safely force [a] for that
context.On the other hand, if in such a context there is always an
execution of a to, then we should strengthen the executability laws
to make room for thenew effect in that context we want to add.
Algorithm 2 below does the job.
Algorithm 2 Revision by an effect law
input: T, [a]output: T[a]
1: if T { [a]} |=PDL
then2: T[a]:= T { [a]}3: else4: T:= T5: for all IP(S ) do6: for
all A atm() do7: A:=
piatm()
piA
pi
piatm()pi /A
pi
8: if S |=CPL
( A) then9: for all IP(S ) do
10: if T |=PDL
( A) a then
11: T:=(T \ Xa)
{(i ( A)) a : i a X
a}12: T:= T {( A) [a]}13: if T |=
PDL( A) [a] then
14: T:= T {(i A) a : i a T}15: T[a]:= T
15
-
8/14/2019 Action Theory Revision
16/28
4.3 Revision by an Executability Law
Revising a theory by a new executability law will have as
immediate con-sequence a change in the set of effect laws: all
those laws preventing theexecution of a shall be weakened. Besides
that, in order to comply withminimal change, we shall ensure that
in all models of the resulting theorythere will be at most one
transition by action a from those worlds in whichTprecluded as
execution.
Let E,a denote a minimum subset of Ea such that S, E,a |=PDL
[a].
In the case the theory is modular [8] (see further),
interpolation guaranteesthis set always exists. Moreover, note that
there can be more than one such
a set, in which case we denote them (E,
a )1, . . . , (E,
a )n. Let
Ea =
1in
(E,a )i
The effect laws in Ea will serve as guidelines to get rid of [a]
in each -worldallowed by the theory: they are the laws to be
weakened to allow for a.
The idea behind our algorithm is as follows. To force the new
executabil-ity law a to be true in all models of the resulting
theory, we visitevery possible -context allowed by it and make the
following operations toensure that a is the case for that
context:
if Tnot always precludes a from being executed in this -context,
wecan safely force a without modifying the other laws
on the other hand, ifa is always inexecutable in that context,
then weshould weaken the laws in Ea .
When weakening the laws in Ea , the first thing we must do is to
preserveall old effects in all other -contexts. To achieve that we
specialize the abovelaws to each possible valuation (maximal
conjunction of literals) satisfying but the actual one. Then, in
the current -valuation, we must ensure that
action a may have any effect, i.e., from this -world we can
reach any otherpossible world. We achieve that by weakening the
consequent of the laws inEa to the exclusive disjunction of all
possible contexts in T.
Finally, to get minimal change, we must ensure that all literals
in this-valuation that are not forced to change are preserved (see
Section 3.3). We
16
-
8/14/2019 Action Theory Revision
17/28
do this by stating a conditional frame axiom [1] of the form (k
) [a],
where k is the above -valuation.
Algorithm 3 below gives the pseudo-code for that:
Algorithm 3 Revision by an executability law
input: T, aoutput: Ta
1: if T { a} |=PDL
then2: Ta:= T { a}3: else4: T:= T
5: for all IP(S ) do6: for all A atm() do7: A:=
piatm()
piA
pi
piatm()pi /A
pi
8: if S |=CPL
( A) then9: if T |=
PDL( A) [a] then
10: T:=
(T \ Ea) {(i ( A)) [a]i : i [a]i E
a}
{(i A) [a]
IP(S )
Aatm()
( A) : i [a]i Ea}
11: for all L Litdo12: if S |=
CPL( A)
L then
13: for all L do14: if T |=
PDL [a] or (T
PDL [a] and T |=
PDL
[a]) then15: T:= T {( A ) [a]}16: T:= T {( A) a}17: Ta:= T
5 Correctness of the Algorithms
Suppose we have two atoms p1 and p2, and only one action a. Let
theaction theory T1 = {p2, p1 [a]p2, a}. The only model of T1 is
M
17
-
8/14/2019 Action Theory Revision
18/28
in Figure 4. Revising such a model by p1 p2 gives us the models
Mi ,
1 i 3, in Figure 4. Now, revising T1 by p1 p2 will give us
T1p1p2 ={p1 p2, p1 [a]p2}. The only model of T1
p1p2
is M1 in Figure 4. Thismeans the semantical revision produces
models (viz. M2 and M
3) that are
not models of the revised theories.
M : p1,p2
a
M1 : p1,p2 M2 : p1, p2 M
3 : p1, p2
Figure 4: The model M of Tand the semantical revision ofM by p1
p2.
The other way round, the algorithms may produce theories whose
modelsdo not result from the semantical revision of some model of
the originaltheory. Consider T2 = {(p1 p2) [a], a}, whose only
model is M inFigure 4. The revision ofM by p1 p2 is as above.
However T2
p1p2
= {p1 p2, (p1 p2) [a]} has a model M
= {{p1, p2}, {p1, p2}, {p1, p2}}, that is not in Mp1p2.
This happens because the possible states are not completely
characterizedby the static laws in S. Fortunately we get the right
result by requiring S to
be big enough. This means considering models whose possible
worlds areall allowed by S:
Definition 5.1 LetT= S E X be an action theory. M = W, R is
thebig model of Tif and only if:
W= val(S); and
Ra = {(w, w) : for all [a] Ea, if |=M
w then |=
M
w}.
Big models thus contain all allowed valuations and maximize
executability.They are connected with the principle of modularity
[8]:
Definition 5.2 ([8]) Tis modular if and only if for every Fml,
ifT |=PDL
, then S |=CPL
.
Theorem 5.1 ([19]) Tis modular if and only if its big model is a
model of T.
18
-
8/14/2019 Action Theory Revision
19/28
Proof: Let Mbig = Wbig, Rbig be the big model of T.
(): By definition, Mbig is such that |=Mbig S E. It remains to
show that
|=MbigX. Let i a Xa, and let w Wbig be such that |=
Mbig
wi. There-
fore for all j Fml such that T |=PDL
j [a], we must have |=Mbig
wj ,
because T |=PDL
(i j), and as Tis modular, S |=CPL
(i j), and hence
|=Mbig(i j). Then by the construction ofMbig, there is some w
Wbig
such that |=Mbig
w for all [a] Ea such that |=
Mbig
w. Thus Ra(w) = and
|=Mbigi a. Hence |=
MbigT.
(): Suppose Tis not modular. Then there must be some Fml
suchthat T |=
PDL and S |=
CPL. This means that there is v val(S) such that
v . As v Wbig (because Wbig contains all possible valuations
ofS), Mbigis not a model ofT.
Under modularity, revision of models ofTby in the semantics
producesmodels of T (the output of the algorithms):
Theorem 5.2 Let T be modular and be a law. For all models M,
if
M M, for some M = {M :|=M
T}, then |=M
T.
Proof: See Appendix A.
Also under modularity, models ofT result from revision of models
ofTby :
Theorem 5.3 Let Tbe modular and a law. For all models M, if
|=M
T,
thenM M, for some M = {M :|=M
T}.
Proof: See Appendix B.
In [8] algorithms are given to check whether Tsatisfies the
principle ofmodularity and also to make Tsatisfy it, if that is not
the case.
Modular theories also have other interesting properties [9]: for
example,consistency of the whole theory amounts to that ofS;
deduction of effect lawsdoes not need the executability ones and
vice versa; prediction of an effect ofa sequence of actions a1; . .
. ; an does not need the effect laws for actions otherthan a1, . .
. , an. This also applies to plan validation when deciding
whethera1; . . . ; an is the case.
19
-
8/14/2019 Action Theory Revision
20/28
6 Conclusion and Perspectives
The problem of action theory change has only recently received
attention inthe litterature, both in action languages [2] and in
dynamic logic [6, 20].
Here we have studied what revising action theories by a law
means, bothin the semantics and at the syntactical level. We have
defined a semanticsbased on distances between models that also
captures minimal change w.r.t.the preservation of effects of
actions. With our algorithms and the correctnessresults under
modularity we have established the link between the semanticsand
the syntax, and have also shown that the modularity notion is
fruitful.Since modularity is preserved across revision (Lemma B.1),
it has to beensured only once during the evolution of the action
theory.
Here we have presented the case for revision. In [20] we also
define thecontraction counterpart of action theory change. There we
show that more-over our constructions satisfy all Katsuno and
Mendelzons postulates forcontraction [10].
Our next step on the subject is to define a general framework in
whichto revise a theory by any formula of the language and not only
laws. Webelieve such a definition will use as basic operations
semantical modificationslike those we studied here
(addition/removal of arrows and worlds). Henceour constructions
will help us in better understanding what revision by ageneral
formula means.
Acknowledgements
This work has been partially supported by the government of the
Federa-tive Republic of Brazil. Grant: CAPES BEX 1389/01-7.
The author is thankful to Andreas Herzig and Laurent Perrussel
for in-teresting discussions on the subject of this work.
References
[1] M. Castilho, O. Gasquet, and A. Herzig. Formalizing action
and changein modal logic I: the frame problem. J. of Logic and
Computation,9(5):701735, 1999.
20
-
8/14/2019 Action Theory Revision
21/28
[2] T. Eiter, E. Erdem, M. Fink, and J. Senko. Updating action
domain de-
scriptions. In L. Kaelbling and A. Saffiotti, editors, Proc.
19th Intl. JointConf. on Artificial Intelligence (IJCAI05), pages
418423, Edinburgh,2005. Morgan Kaufmann Publishers.
[3] J. Finger. Exploiting constraints in design synthesis. PhD
thesis, Stan-ford University, Stanford, 1987.
[4] P. Gardenfors. Knowledge in Flux: Modeling the Dynamics of
EpistemicStates. MIT Press, Cambridge, MA, 1988.
[5] D. Harel, J. Tiuryn, and D. Kozen. Dynamic Logic. MIT Press,
Cam-
bridge, MA, 2000.
[6] A. Herzig, L. Perrussel, and I. Varzinczak. Elaborating
domain descrip-tions. In G. Brewka, S. Coradeschi, A. Perini, and
P. Traverso, editors,Proc. 17th Eur. Conf. on Artificial
Intelligence (ECAI06), pages 397401, Riva del Garda, 2006. IOS
Press.
[7] A. Herzig and O. Rifi. Propositional belief base update and
minimalchange. Artificial Intelligence, 115(1):107138, 1999.
[8] A. Herzig and I. Varzinczak. On the modularity of theories.
In
R. Schmidt, I. Pratt-Hartmann, M. Reynolds, and H. Wansing,
edi-tors, Advances in Modal Logic, volume 5, pages 93109. Kings
CollegePublications, 2005. Selected papers of AiML 2004 (also
available athttp://www.aiml.net/volumes/volume5).
[9] A. Herzig and I. Varzinczak. Metatheory of actions: beyond
consistency.Artificial Intelligence, 171:951984, 2007.
[10] H. Katsuno and A. Mendelzon. On the difference between
updating aknowledge base and revising it. In P. Gardenfors, editor,
Belief revision,pages 183203. Cambridge University Press, 1992.
[11] M. Kracht and F. Wolter. Properties of independently
axiomatizablebimodal logics. J. of Symbolic Logic, 56(4):14691485,
1991.
[12] M. Kracht and F. Wolter. Simulation and transfer results in
modal logic:A survey. Studia Logica, 59:149177, 1997.
21
-
8/14/2019 Action Theory Revision
22/28
[13] D. Makinson. Friendliness and sympathy in logic. In J.-Y.
Beziau,
editor, Logica Universalis. Springer-Verlag, 2nd edition,
2007.
[14] P. Marquis. Consequence finding algorithms. In D. Gabbay
and Ph.Smets, editors, Algorithms for Defeasible and Uncertain
Reasoning, inS. Moral, J. Kohlas (Eds), Handbook of Defeasible
Reasoning and Uncer-tainty Management Systems, volume 5, chapter 2,
pages 41145. KluwerAcademic Publishers, 2000.
[15] J. McCarthy and P. Hayes. Some philosophical problems from
the stand-point of artificial intelligence. In B. Meltzer and D.
Mitchie, editors,Machine Intelligence, volume 4, pages 463502.
Edinburgh University
Press, 1969.
[16] R. Parikh. Beliefs, belief revision, and splitting
languages. In L. Moss,editor, Logic, Language and Computation,
volume 2 of CSLI LectureNotes, pages 266278. CSLI Publications,
1999.
[17] S. Popkorn. First Steps in Modal Logic. Cambridge
University Press,1994.
[18] W. V. O. Quine. The problem of simplifying truth functions.
AmericanMathematical Monthly, 59:521531, 1952.
[19] I. Varzinczak. What is a good domain description?
Evaluating andrevising action theories in dynamic logic. PhD
thesis, Universite PaulSabatier, Toulouse, 2006.
[20] I. Varzinczak. Action theory contraction and minimal
change. To appearin Proc. KR, 2008.
[21] M.-A. Winslett. Reasoning about action using a possible
models ap-proach. In R. Smith and T. Mitchell, editors, Proc. 7th
Natl. Conf. onArtificial Intelligence (AAAI88), pages 8993, St.
Paul, 1988. Morgan
Kaufmann Publishers.
22
-
8/14/2019 Action Theory Revision
23/28
A Proof of Theorem 5.2
Let be a law, M M, and let T be the output of our algorithms
on
input theory Tand law .
If T {} |=PDL
, then M M \ {M :|=M
} and M is a model ofT = T {}.
Let T {} |=PDL
. We analyze each case.
Let be some Fml. Then M = W, R where W = (W\val())val() is
minimal w.r.t. W and R R is maximal w.r.t. R, for some M =W, R
M.
As we have assumed the syntactical classical revision operator
is soundand complete w.r.t. its semantics and is moreover minimal,
we have |=
M
S.
Because R R, |=M
E. Thus it is enough to show that M is a model of theadded
laws.
Given (i A) a T, for every w W
, if |=M
wi A, then
w W (because S |=CPL
( A) ). From w i and i a Xa,
we have Ra(w) = . Suppose Ra(w) = . As |=
M
S E and R is
maximal, every M = W, R s.t. |=M
S E is s.t. Ra(w) = , andthen S E |=
PDL( A) [a]. Because T |=
PDL( A) a, and
S |=CPL
( A) and S |=CPL
( A) , we get S , E, X |=PDL
( A), and then (i A) a / T. Hence Ra(w) = , and
|=M
(i A) a.If ( A) [a] T
, then S |=CPL ( A) . Thus, for every
w W, if |=M
w A, R
a(w) = and the result follows.
Let now have the form [a], for , Fml. Then M = W, Rfor some M =
W, R M s.t. W = W and R R, where R is maximalw.r.t. R.
From W = W, |=M
S. As R R, |=M
E. Because S E T[a], itsuffices to show that M is a model of the
added laws.
By definition, |=M
[a], and then |=M
( A) [a] for every IP(S ).
If (iA) a T[a], then for every w W
, ifw iA,we have w i. As w W, and i a Xa, Ra(w) = . If R
a(w) = ,
then w for every w Ra(w). Thus as far as we added ( A) [a]to
T[a], we must have T
[a] |=PDL( A) [a]. Hence R
a(w) = .
23
-
8/14/2019 Action Theory Revision
24/28
Let (i T|=PDL(A)a ( A)) a T [a]. For everyw W, if |=M
wi
T|=PDL
(A)a( A), then w i, and as w W
and i a Xa, we have Ra(w) = . If Ra(w) = , because |=
M
S E
and R is maximal, every M = W, R s.t. |=M
S E is s.t. Ra(w) = .Then S, E |=
PDL
w [a]. But then T |=PDL
w [a], and as
i a Xa, T |=PDL(
w i), and then w / W, a contradiction.Hence Ra(w) = .
Finally, let be of the form a, for some Fml. Then M =W, R for
some M = W, R M s.t. W = W and R = R R,a , with
R,a = {(w, w) : w RelTarget(w, a,M, M)}
such that R is minimal w.r.t. R.From W = W, |=
M
S. As R R, |=M
X. As far as S X T a, itis enough to show that M satisfies the
added laws.
By definition, |=M
a, and then |=M
( A) a for every IP(S ).
If (i A) [a](i
IP(S )
Aatm()
( A)) Ta, then for
every w W, if w i A, then w i. Because |=M
i [a]i,
we have |=M
w i for all w
W s.t. (w, w
) Ra, and then |=M
w i for everyw W s.t. (w, w) Ra \ R
,a . Now, given (w, w
) R,a , we have
|=M
w
IP(S )
Aatm()
( A), and the result follows.
Let (i T|=PDL
(A)[a]( A)) [a]i T
a. For every w
W, if|=M
wi
T|=PDL
(A)[a]( A), then w i, and as |=
Mi [a]i,
we have |=M
wi for all w
W s.t. (w, w) Ra. Thus |=M
wi for every
w W s.t. (w, w) Ra \ R,a . Now, if w , then R
,a = and the
result follows. Otherwise, if w , then T |=PDL
( A) [a], and then
(i T|=PDL(A)[a] ( A)) [a]i has not been put in T
a, acontradiction.
Let now ( A ) [a] Ta. For every w W
, if|=M
w A ,
then |=M
w, and then |=
M
w. From ( A ) [a] T
a, we have
T |=PDL
[a] or T |=PDL
[a] and T |=PDL
[a]. In both cases, |=M
w
24
-
8/14/2019 Action Theory Revision
25/28
for every w Ra(w), and then |=M
w for every w s.t. (w, w) R \ R,a . It
remains to show that |=M
w for every w W s.t. (w, w) R,a .
Suppose |=M
w. Then w \ w. From the construction ofM, there
is M = W, R M s.t. there is (u, v) Ra and v \ u, i.e., |=M
u
and |=M
v. From (u, v) Ra, we do not have T |=PDL [a]. From
|=M
v, we do not have T |=
PDL [a]. Thus the algorithm has not put
( A ) [a] in Ta, a contradiction.
B Proof of Theorem 5.3
Lemma B.1 Let be a law. If Tis modular and T {} |=PDL
, then T ismodular.
Proof: Let be nonclassical. Suppose T is not modular. Then there
is Fml s.t. T |=PDL
and S |=CPL
, where S is the set of static lawsin T. Suppose T |=PDL
. Then we must have T |=PDL [a] and
T |=PDL a.
Suppose has the form [a], for , Fml. Then for all -
contexts, as far as T |=PDL( ) [a], ( ) a / T. ThenT |=PDL
if and only if S |=CPL
, a contradiction.Suppose is of the form a, for Fml. Then for
all -
contexts such that T |=PDL( ) a, T |=PDL(
) [a] isimpossible as far as Ea has been weakened. Then T
|=PDL
if and only ifS |=
CPL, a contradiction.
Hence we have T |=PDL
. Because is nonclassical, S = S. ThenT |=
PDL and S |=
CPL, and hence Tis not modular.
Let now be some Fml. Suppose T is not modular, i.e., there is
Fml s.t. T |=PDL
and S = S |=CPL
.
From S |=CPL, there is v val(S) s.t. v .If v val(S), as Tis
modular, T |=
PDL. From this and T |=PDL
, wemust have T |=PDL
[a] and T |=PDL a. From the latter,
we get T |=PDL
a, and from the first we have T |=PDL
[a].Putting both results together we get T |=
PDL. As S |=
CPL, we have a
contradiction.
25
-
8/14/2019 Action Theory Revision
26/28
If v / val(S), then T |=PDL a, as no executability for
context
has been put into T. Hence T |=PDL, a contradiction.
Lemma B.2 If Mbig = Wbig, Rbig is a model of T, then for every M
=
W, R such that |=M
Tthere is a minimal (w.r.t. set inclusion) extensionR Rbig\ R
such thatM
= val(S), R R is a model of T.
Proof: Let Mbig = Wbig, Rbig be a model ofT, and let M = W, R be
such
that |=M
T. Consider M = val(S), R. If |=M
T, we have R = Rbig \ R
that is minimal. Suppose then |=M
T. We extend M to a model ofTthat is
a minimal extension ofM. As |=M
T, there is v val(S) \ Wsuch that |=M
v
T.
Then there is Tsuch that |=M
v. If is some Fml, as v Wbig,
Mbig is not a model of T. If is of the form [a], for , Fml,there
is v val(S) such that (v, v) Ra and v
, a contradiction sinceRa(v) = . Let now have the form a for
some Fml. Then
|=M
v. As v Wbig, if |=
Mbig
v a, then |=
Mbig T. Hence, Rbiga(v) = .
Thus taking any (v, v) Rbiga gives us a minimal R = {(v, v)}
such that
M = val(S), R R is a model of T.
Lemma B.3 Let Tbe modular, and be a law. Then T |=PDL
if and only
if everyM = val(S), R such that |=W,R
Tand R R is a model of .
Proof:(): Straightforward, as T |=
PDL implies |=
M for every M such that |=
MT,
in particular for those that are extensions of some model of
T.
(): Suppose T |=PDL
. Then there is M = W, R such that |=M
Tand |=M
.As Tis modular, the big model Mbig = Wbig, Rbig of Tis a model
of T.Then by Lemma B.2 there is a minimal extension R of R w.r.t.
Rbig such
that M = val(S), R R is a model of T. Because |=M
, there is w W
such that |=M
w . If is some propositional Fml or an effect law, anyextension
M ofM is such that |=
M
w. If is of the form a, then
|=M
w and Ra(w) = . As any extension ofM is such that (u, v) R
if and
only if u val(S) \ W, only worlds other than those in W get a
new leaving
arrow. Thus (R R)a(w) = , and then |=M
w.
26
-
8/14/2019 Action Theory Revision
27/28
Lemma B.4 LetTbe modular and a law. IfM = val(S), R is a
model
of T, then there is M = {M :|=M
T} s.t. M M.
Proof: Let M = val(S), R be such that |=M
T. If |=M
T, the result
follows. Suppose |=M
T. We analyze each case.Let be of the form [a], for , Fml. Let M
= {M : M =
val(S), R}. As Tis modular, by Lemmas B.2 and B.3, M is
non-emptyand contains only models of T.
Suppose M is not a minimal model of T[a], i.e., there is M
such
that M M M for some M M. Then M and M differ only in the
effect of a in a given -world, viz. a A-context, for some IP(S
)
and A =
piatm()piA
pi
piatm()pi /A
pi such that A atm().
Because |=M
( A) a, we must have |=M
( A) a, and
then |=M
[a]. Hence M is minimal w.r.t. M.When revising by an effect law,
S = S. Hence taking the right R and
R,a such that M = val(S), R and R = R \ R,a , for some R
,a
{(w, w) :|=M
w, |=
M
w and (w, w) Ra}, we have M M and then M
M[a].
Let have the form a, for Fml. Let M = {M : M =val(S), R}. As Tis
modular, by Lemmas B.2 and B.3, M is non-empty
and contains only models of T.Suppose that M is not a minimal
model of Ta, i.e., there is M
such that |=M
Ta and M M M for some M M. Then M and
M differ only on the executability of a in a given -world, i.e.,
a A-context, for some IP(S ) and A =
piatm()
piA
pi
piatm()pi /A
pi, such
that A atm(). This means M has no arrow leaving this
A-world.
Then |=M
( A) [a], and hence |=M
a. Hence M is a minimalmodel of Ta w.r.t. M.
When revising by executability laws, S = S. Thus taking the
right R
and a minimal R,a such that M = val(S), R and R
= R R,a , for
some R,a {(w, w) :|=
M
w and w RelTarget(w, a,M, M)}, we
get M M and then M Ma.
Finally, let be some Fml. Then M is such that for every w W,if
Ra(w) = , then w val(S) and Ra(w) = for every M = W, R M.Choosing
the right M M the result follows.
27
-
8/14/2019 Action Theory Revision
28/28
Proof of Theorem 5.3
Let T be the output of our algorithms on input theory Tand law .
If
T = T {}, then T {} |=PDL, and hence every M such that |=
M
T is
such that M M \ {M :|=M
} and the result follows.
Suppose T {} |=PDL
. From the hypothesis that Tis modular andLemma B.1, T is
modular. Then M = val(S), R is a model of T, byLemma B.2. From this
and Lemma B.3 the result follows.
28