Embed Size (px)
Citation preview

© ABNT 2008
NORMABRASILEIRA
ABNT NBR 17094-1
Primeira edição15.09.2008
Válida a partir de15.10.2008
Versão corrigida 01.12.2008
Máquinas elétricas girantes —Motores de induçãoParte 1: Trifásicos
Rotating electrical machines – Induction motorsPart 1: Polyphase
Palavras-chave: Máquina girante. Motor de indução. Trifásico.Descriptors: Rotating machinery. Induction motor. Polyphase.
ICS 29.160
ISBN 978-85-07-01022-7
Número de referênciaABNT NBR 17094-1:2008
73 páginas
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
ii © ABNT 2008 - Todos os direitos reservados
© ABNT 2008Todos os direitos reservados. A menos que especificado de outro modo, nenhuma parte desta publicação pode ser reproduzida ou utilizada por qualquer meio, eletrônico ou mecânico, incluindo fotocópia e microfilme, sem permissão por escrito pela ABNT.
ABNTAv.Treze de Maio, 13 - 28º andar20031-901 - Rio de Janeiro - RJTel.: + 55 21 3974-2300Fax: + 55 21 [email protected]
Impresso no Brasil
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados iii
Sumário Página
Prefácio.......................................................................................................................................................................vi
1 Escopo............................................................................................................................................................1
2 Referências normativas ................................................................................................................................1
3 Termos e definições ......................................................................................................................................2
4 Regimes..........................................................................................................................................................64.1 Especificação de um regime ........................................................................................................................64.2 Tipos de regimes ...........................................................................................................................................64.2.1 Regime tipo S1 – Regime contínuo .............................................................................................................64.2.2 Regime tipo S2 – Regime de tempo limitado..............................................................................................74.2.3 Regime tipo S3 – Regime intermitente periódico.......................................................................................84.2.4 Regime tipo S4 – Regime intermitente periódico com partidas ...............................................................94.2.5 Regime tipo S5 – Regime intermitente periódico com frenagem elétrica .............................................104.2.6 Regime tipo S6 - Regime de funcionamento contínuo periódico com carga intermitente..................124.2.7 Regime tipo S7 – Regime de funcionamento contínuo periódico com frenagem elétrica ..................134.2.8 Regime tipo S8 – Regime de funcionamento contínuo periódico com mudanças correspondentes
de carga e de velocidade ............................................................................................................................144.2.9 Regime tipo S9 – Regime com variações não periódicas de carga e de velocidade ...........................164.2.10 Regime tipo S10 – Regime com cargas e velocidades constantes distintas........................................17
5 Características nominais ............................................................................................................................195.1 Declaração das características nominais .................................................................................................195.2 Classes de características nominais.........................................................................................................195.2.1 Características nominais para regime contínuo ......................................................................................195.2.2 Características nominais para regime de tempo limitado.......................................................................195.2.3 Características nominais para regime periódico .....................................................................................195.2.4 Características nominais para regime não periódico..............................................................................195.2.5 Características nominais para regime com cargas e velocidades constantes distintas.....................205.2.6 Características nominais para carga equivalente....................................................................................205.3 Seleção de uma classe de características nominais ...............................................................................205.4 Atribuição da potência a uma classe de características nominais ........................................................205.5 Potência nominal .........................................................................................................................................215.6 Máquinas com mais de uma característica nominal................................................................................21
6 Condições de funcionamento no local de instalação..............................................................................216.1 Generalidades ..............................................................................................................................................216.2 Altitude..........................................................................................................................................................216.3 Máxima temperatura do ar ambiente .........................................................................................................216.4 Mínima temperatura do ar ambiente..........................................................................................................216.5 Temperatura da água como fluido de resfriamento.................................................................................226.6 Estocagem e transporte..............................................................................................................................22
7 Condições elétricas de funcionamento.....................................................................................................227.1 Alimentação elétrica....................................................................................................................................227.2 Forma e simetria de tensões e correntes..................................................................................................227.3 Variações de tensão e de freqüência durante o funcionamento ............................................................237.4 Motores de indução trifásicos operando em um sistema de neutro isolado........................................247.5 Níveis de tensão suportáveis (pico e gradiente) para motores alimentados por inversor de
freqüência.....................................................................................................................................................257.6 Condições de funcionamento especiais ...................................................................................................25
8 Características de partida...........................................................................................................................268.1 Generalidades ..............................................................................................................................................26
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
iv © ABNT 2008 - Todos os direitos reservados
8.2 Motores de indução de gaiola, trifásicos, para tensão nominal igual ou inferior a 1 000 V, potência nominal igual ou inferior a 1 600 kW e previstos para partida direta (categorias N, H e D) ou partida estrela-triângulo (NY, HY) ...........................................................................................................................26
8.2.1 Motores de categoria N ...............................................................................................................................278.2.2 Motores de categoria NY.............................................................................................................................308.2.3 Motores de categoria H ...............................................................................................................................318.2.4 Motores de categoria HY.............................................................................................................................318.2.5 Motores de categoria D ...............................................................................................................................31
9 Elevação de temperatura ............................................................................................................................359.1 Classificação térmica ..................................................................................................................................359.2 Condições durante o ensaio de elevação de temperatura......................................................................359.2.1 Temperatura do fluido refrigerante............................................................................................................359.2.2 Medição da temperatura do fluido refrigerante........................................................................................369.3 Determinação da elevação de temperatura dos enrolamentos e de outras partes do motor .............369.3.1 Elevação de temperatura de uma parte da máquina ...............................................................................369.3.2 Métodos de determinação da temperatura ou da elevação de temperatura .........................................369.3.3 Escolha do método de determinação da temperatura dos enrolamentos ............................................379.3.4 Determinação da elevação de temperatura dos enrolamentos pelo método da variação da
resistência ....................................................................................................................................................389.3.5 Determinação da elevação de temperatura pelo método dos detectores de temperatura embutidos
(DTE) .............................................................................................................................................................389.3.6 Determinação da elevação de temperatura pelo método termométrico................................................399.3.7 Determinação da elevação de temperatura dos enrolamentos pelo método da superposição..........399.3.8 Correção de medições realizadas após o motor atingir o repouso .......................................................399.3.9 Duração do ensaio de elevação de temperatura para motores com características nominais do tipo
contínuo máximo (regime-tipo S1) ............................................................................................................409.3.10 Ensaios de elevação de temperatura para motores com características nominais diferentes
daquelas do tipo contínuo máximo ...........................................................................................................409.3.11 Determinação da constante de tempo térmica equivalente de motores para regime tipo S9.............419.3.12 Método de medição da temperatura dos mancais ...................................................................................419.4 Limites de elevação de temperatura e de temperatura total...................................................................429.4.1 Aplicação das tabelas .................................................................................................................................429.4.2 Correções dos limites de elevação de temperatura ou de temperatura total para os enrolamentos
do estator com tensão nominal superior a 12 000 V ...............................................................................459.4.3 Correções dos limites de elevação de temperatura ou de temperatura total para levar em conta as
condições de funcionamento no local da instalação diferentes das indicadas na Seção 6 ...............459.4.4 Correções dos limites de elevação de temperatura ou de temperatura total para levar em conta as
condições de ensaio ...................................................................................................................................48
10 Fator de serviço ...........................................................................................................................................50
11 Ensaio dielétrico ..........................................................................................................................................5111.1 Generalidades ..............................................................................................................................................5111.2 Ensaio dielétrico em motores novos.........................................................................................................5111.3 Ensaio dielétrico em motores reenrolados...............................................................................................52
12 Sobrecorrente ocasional.............................................................................................................................5312.1 Generalidades ..............................................................................................................................................5312.2 Valor da sobrecorrente ocasional..............................................................................................................53
13 Excesso de conjugado momentâneo ........................................................................................................5313.1 Motores de indução trifásicos para aplicação geral ................................................................................5313.2 Motores de indução trifásicos para aplicações específicas ...................................................................53
14 Conjugado mínimo de partida....................................................................................................................53
15 Velocidade segura de funcionamento para motores de indução de gaiola ..........................................54
16 Sobrevelocidade ..........................................................................................................................................54
17 Rendimento e perdas ..................................................................................................................................5517.1 Valores de rendimento de plena carga......................................................................................................5517.1.1 Linha-padrão ................................................................................................................................................5517.1.2 Linha de alto rendimento ............................................................................................................................57
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados v
17.2 Determinação do rendimento e das perdas..............................................................................................58
18 Nível de ruído ...............................................................................................................................................58
19 Vibração........................................................................................................................................................59
20 Correspondência entre potência nominal, velocidade síncrona e carcaça ..........................................59
21 Requisitos construtivos..............................................................................................................................6021.1 Terminais de aterramento...........................................................................................................................6021.2 Chaveta da ponta de eixo ...........................................................................................................................61
22 Marcação ......................................................................................................................................................6222.1 Requisitos gerais.........................................................................................................................................6222.2 Lista de informações constantes na marcação .......................................................................................6222.3 Folha de dados ............................................................................................................................................64
23 Inspeção .......................................................................................................................................................6423.1 Relação dos ensaios ...................................................................................................................................6423.2 Classificação dos ensaios..........................................................................................................................64
24 Tolerâncias...................................................................................................................................................66
25 Coordenação de tensões e potências .......................................................................................................67
Anexo A (informativo) Efeitos de um sistema de tensões desequilibrado sobre as características de funcionamento de motores de indução trifásicos de gaiola...................................................................68
A.1 Generalidades ..............................................................................................................................................68A.2 Efeitos de um sistema de tensões desequilibrado sobre as características de funcionamento de um
motor.............................................................................................................................................................68A.3 Cálculo da percentagem de desequilíbrio das tensões ..........................................................................68A.4 Redução da potência útil de um motor para evitar sobreaquecimento.................................................69A.5 Dispositivos de proteção contra sobrecargas para motores com redução da potência.....................70
Anexo B (informativo) Guia para a aplicação do regime tipo S10 e para a obtenção do valor da expectativa de vida térmica relativa (TL) .......................................................................................................................71
Anexo C (normativo) Folha de dados .....................................................................................................................72
Bibliografia ................................................................................................................................................................73
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
vi © ABNT 2008 - Todos os direitos reservados
Prefácio
A Associação Brasileira de Normas Técnicas (ABNT) é o Foro Nacional de Normalização. As Normas Brasileiras, cujo conteúdo é de responsabilidade dos Comitês Brasileiros (ABNT/CB), dos Organismos de Normalização Setorial (ABNT/ONS) e das Comissões de Estudo Especiais (ABNT/CEE), são elaboradas por Comissões de Estudo (CE), formadas por representantes dos setores envolvidos, delas fazendo parte: produtores, consumidores e neutros (universidade, laboratório e outros).
Os Documentos Técnicos ABNT são elaborados conforme as regras das Diretivas ABNT, Parte 2.
A Associação Brasileira de Normas Técnicas (ABNT) chama atenção para a possibilidade de que alguns dos elementos deste documento podem ser objeto de direito de patente. A ABNT não deve ser considerada responsável pela identificação de quaisquer direitos de patentes.
A ABNT NBR 17094-1 foi elaborada no Comitê Brasileiro de Eletricidade (ABNT/CB-03), pela Comissão de Estudo de Máquinas de Indução (CE-03:002.01). O Projeto circulou em Consulta Nacional conforme Edital nº 04,de 26.03.2008 a 26.05.2008, com o número de Projeto 03:002.01-001/1.
Esta Norma é baseada na IEC 60034-1:2004.
Esta Norma cancela e substitui a ABNT NBR 7094:2003.
A ABNT NBR 17094, sob o título geral “Máquinas elétricas girantes – Motores de indução”, tem previsão de conter as seguintes partes:
Parte 1: Trifásicos;
Parte 2: Monofásicos.
Esta versão corrigida da ABNT NBR 17094-1 incorpora a Errata 1 de 01.12.2008.
O Escopo desta Norma Brasileira em inglês é o seguinte:
Scope
This part of ABNT NBR 17094 establishes the minimum requirements for 3-phase induction motors, except those motors mentioned at 1.2.
This part of ABNT NBR 17094 does not apply to induction motors for tensile vehicles.
NOTE 1 Induction motors for tensile vehicles, see ABNT NBR 8149.
NOTE 2 Induction motors covered in this part of ABNT NBR 17094 can be subject to requirement of other Brazilian regulations, as for example
ABNT NBR 5363, Electrical equipments for explosive atmospheres – explosion proof housings – Type of protection “d” –
Specification
ABNT NBR 10350, AC squirrel-cage motor for naval use – Specification
ABNT NBR 11723, Electrical rotating machinery – 3-phase asynchronous slip-ring motors for intermittent duty –
Specification
ABNT NBR IEC 60079-79, Explosive atmospheres – PART 7: Equipament protection by increased safety
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
NORMA BRASILEIRA ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 1
Máquinas elétricas girantes — Motores de induçãoParte 1: Trifásicos
1 Escopo
1.1 Esta parte da ABNT NBR 17094 estabelece os requisitos mínimos para motores de indução trifásicos, com exceção daqueles motores mencionados em 1.2.
1.2 Esta parte da ABNT NBR 17094 não se aplica a motores de indução para veículos de tração.
NOTA 1 Para motores de indução para veículos de tração, ver a ABNT NBR 8149.
NOTA 2 Os motores de indução abrangidos por esta parte da ABNT NBR 17094 podem estar sujeitos a requisitos de outras Normas Brasileiras, como, por exemplo:
ABNT NBR 5363, Equipamentos elétricos para atmosferas explosivas – Invólucros à prova de explosão – Tipo de
proteção “d” – Especificação
ABNT NBR 9883, Equipamentos elétricos para atmosferas explosivas – Segurança aumentada – Tipo de proteção “e” –
Especificação
ABNT NBR 10350, Motor de indução de gaiola para uso naval - Especificação
ABNT NBR 11723, Máquinas elétricas girantes – Motores assíncronos trifásicos de anéis para regime intermitente –
Especificação
2 Referências normativas
Os documentos relacionados a seguir são indispensáveis à aplicação deste documento. Para referências datadas, aplicam-se somente as edições citadas. Para referências não datadas, aplicam-se as edições mais recentes do referido documento (incluindo emendas).
ABNT NBR 5031, Máquinas elétricas girantes – Classificação das formas construtivas e montagens – Classificação
ABNT NBR 5383-1, Máquinas elétricas girantes – Parte 1: Motores de indução trifásicos – Ensaios
ABNT NBR 5457, Eletrotécnica e eletrônica – Máquinas girantes – Terminologia
ABNT NBR 7565, Máquinas elétricas girantes – Limites de ruído – Especificação
ABNT NBR 7844, Identificação dos terminais e das terminações de equipamentos elétricos – Disposições gerais para identificação por meio de notação alfanumérica – Procedimento
ABNT NBR 9884, Máquinas elétricas girantes – Graus de proteção proporcionados pelos invólucros – Especificação
ABNT NBR 11390, Máquinas elétricas girantes – Medição, avaliação e limites da severidade de vibração mecânica de máquinas de altura de eixo igual ou superior a 56 mm – Especificação
ABNT NBR 15623-1, Máquina elétrica girante – Dimensões e séries de potências para máquinas elétricas girantes – Padronização – Parte 1: Designação de carcaças entre 56 a 400 e flanges entre 55 a 1 080
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
2 © ABNT 2008 - Todos os direitos reservados
ABNT NBR 15623-2, Máquina elétrica girante – Dimensões e séries de potências para máquinas elétricas girantes – Padronização – Parte 2: Designação de carcaças entre 355 a 1 000 e flanges entre 1 180 a 2 360
ABNT NBR 15623-3, Máquina elétrica girante – Dimensões e séries de potências para máquinas elétricas girantes – Padronização – Parte 3: Motores pequenos e flanges BF10 a BF50
ABNT NBR IEC 60079-7, Atmosferas explosivas – Parte 7: Proteção de equipamentos por segurança aumentada
IEC 60027-1, Letter symbols to be used in electrical technology – Part 1: General
IEC 60027-4, Letter symbols to be used in electrical technology – Part 4: Rotating electric machines
IEC 60034-12, Rotating electrical machines – Part 12: Starting performance of single-speed three-phase cage induction motors
IEC 60034-15, Rotating electrical machines – Part 15: Impulse voltage withstand levels of rotating a.c. machines with form-wound stator coils
IEC 60034-17, Rotating electrical machines – Part 17: Cage induction motors when fed from converters –Application guide
IEC 60034-18, Rotating electrical machines – Part 18: Functional evaluation of insulation systems –Sections 1: General guidelines
IEC 60034-25, Rotating electrical machines – Part 25: Guidance for the design and performance of a.c. motors specifically designed for converter supply
IEC 60079-1, Explosive atmospheres – Part 1: Equipment protection by flameproof enclosures 'd'
IEC 60085, Electrical insulation – Thermal evaluation and designation
EN 50209, Rotating electrical machines – Test of insulation of bars and coils of high-voltage machines
3 Termos e definições
Para os efeitos desta parte da ABNT NBR 17094, aplicam-se os seguintes termos e definições.
NOTA 1 Para outras definições que não sejam as de 3.11, 3.12, 3.19, 3.20, 3.21 e 3.31, referentes a métodos de resfriamento, ver ABNT NBR 5110.
NOTA 2 Os números entre parênteses correspondem aos mesmos termos da publicação IEC 60050 (411).
3.1características nominais (411-51-24)conjunto de valores nominais e condições de funcionamento
3.2carga (411-51-01)conjunto dos valores das grandezas elétricas e mecânicas que caracterizam as solicitações impostas a uma máquina girante, por um circuito elétrico ou um dispositivo mecânico, em um dado instante
3.3ciclo de regime (411-51-07)variação de carga com o tempo, que pode ou não se repetir, e na qual o tempo do ciclo é demasiadamente curto para que se atinja o equilíbrio térmico
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 3
3.4conjugado com rotor bloqueado (411-48-06)menor conjugado medido que o motor desenvolve em sua ponta de eixo, com o seu rotor bloqueado em qualquer posição angular, sob tensão e freqüência nominais
3.5conjugado máximomaior valor do conjugado assíncrono, em regime permanente, que o motor desenvolve sem queda abrupta de velocidade, sob tensão e freqüência nominais
NOTA Esta definição não se aplica aos motores de indução cujo conjugado diminui continuamente quando a velocidade aumenta.
3.6conjugado mínimo de partidamenor valor do conjugado assíncrono, em regime permanente, que o motor desenvolve entre a velocidade zero e a velocidade correspondente ao conjugado máximo, sob tensão e freqüência nominais
NOTA 1 Esta definição não se aplica aos motores de indução cujo conjugado diminui continuamente quando a velocidade aumenta.
NOTA 2 Adicionalmente aos conjugados assíncronos em regime permanente existem, às velocidades específicas, conjugados harmônicos síncronos decorrentes do ângulo de carga do rotor. A tais velocidades, o conjugado de aceleração pode ser negativo para alguns ângulos de carga do rotor. A experiência e o cálculo mostram que esta é uma condição de funcionamento instável e que, em conseqüência, os conjugados harmônicos síncronos não impedem a aceleração do motor e por isso são excluídos da definição.
3.7conjugado nominal (411-48-05)conjugado que o motor desenvolve no seu eixo sob potência e velocidade nominais
3.8constante de tempo térmica equivalenteconstante de tempo que, substituindo várias constantes de tempo individuais, determina aproximadamente a evolução de temperatura em um enrolamento após uma variação de corrente em degrau
3.9corrente com rotor bloqueado (411-48-16)maior valor eficaz da corrente absorvida pelo motor, em regime permanente (ver ABNT NBR 5457), com o seu rotor bloqueado em qualquer posição angular, sob tensão e freqüência nominais
3.10efeito de inérciasoma (integral) dos produtos dos pesos elementares de um corpo pelos quadrados do dobro de suas distâncias radiais ao eixo de referência
NOTA 1 Esta grandeza é designada pelo símbolo literal GD2 e é expressa em N.m2 (newton-metro quadrado).
NOTA 2 GD2 = 4gJ, sendo GD2 em N.m2 (newton-metro quadrado), J (momento de inércia) em kg.m2 (quilograma-metro quadrado) e g (aceleração da gravidade local) em m/s2 (metro por segundo, por segundo).
3.11enrolamento encapsulado (411-39-06)enrolamento completamente envolvido ou selado por isolação moldada
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
4 © ABNT 2008 - Todos os direitos reservados
3.12enrolamento resfriado diretamente (411-44-08)enrolamento resfriado principalmente por um fluido refrigerante circulando em contato direto com a parte resfriada através de condutores ocos, tubos, dutos, ou canais que, independentemente de sua orientação, fazem parte integrante do enrolamento, internamente à isolação principal
3.13enrolamento resfriado indiretamente (411-44-09)todo enrolamento que não é resfriado diretamente
NOTA Para 3.12 e 3.13, nos casos em que não for mencionado “diretamente” ou “indiretamente”, o enrolamento é considerado resfriado indiretamente.
3.14ensaios de rotina (411-53-02)ensaios realizados em cada máquina, individualmente, para verificar a sua conformidade com certos critérios
3.15ensaios de tipo (411-53-01)ensaios realizados em uma ou mais unidades fabricadas segundo certo projeto, para demonstrar que este projeto satisfaz certas condições especificadas
3.16ensaios especiaisensaios não considerados de tipo ou de rotina, devendo ser realizados somente mediante acordo prévio entre fabricante e comprador
3.17equilíbrio térmico (411-51-08)estado alcançado quando as elevações de temperatura das diversas partes da máquina não variam mais que um gradiente de 2 K/h
NOTA O equilíbrio térmico pode ser determinado do gráfico da elevação de temperatura em função do tempo quando as retas entre pontos no começo e no fim de dois intervalos de tempo razoáveis sucessivos tiverem cada uma um gradiente menor que 2 K/h.
3.18fator de duração do ciclo (411-51-09)razão entre o período de funcionamento em carga, incluindo a partida e a frenagem elétrica, e a duração do ciclo de regime, expressa em porcentagem
3.19fluido refrigerante (411-44-02)fluido líquido ou gasoso, por intermédio do qual o calor é transferido
3.20fluido refrigerante primário (411-44-03)fluido líquido ou gasoso que, estando a uma temperatura inferior àquela das partes da máquina com as quais está em contato, remove o calor dessas partes
3.21fluido refrigerante secundário (411-44-04)fluido líquido ou gasoso que, estando a uma temperatura inferior àquela do fluido refrigerante primário, remove o calor deste fluido refrigerante primário por meio de um trocador de calor ou através da superfície externa da máquina
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 5
3.22funcionamento em vazio (411-51-02)condição de funcionamento de uma máquina girando com potência de saída nula (mantidas as outras condições normais de funcionamento)
3.23isolação principalisolação básica aplicada a partes vivas, destinada a assegurar a proteção contra choques elétricos
3.24isolação suplementarisolação adicional e independente da isolação principal, destinada a assegurar proteção contra choques elétricos no caso de falha da isolação principal
3.25momento de inércia (dinâmico)soma (integral) dos produtos das massas elementares de um corpo pelos quadrados de suas distâncias radiais ao eixo de referência
NOTA Esta grandeza é designada pelo símbolo literal J e é expressa em kg.m2 (quilograma-metro quadrado).
3.26plena carga (411-51-10)carga que solicita uma máquina a funcionar nas suas características nominais
3.27potência nominalvalor da potência de saída incluído nas características nominais, que deve ser expresso em cavalo vapor (cv) ou em watts (W) ou os seus múltiplos como, por exemplo (kW)
NOTA É prática em alguns países expressar a potência mecânica disponível no eixo do motor em horse-power (1 hp é equivalente a 746 W; 1 cv (cavalo-vapor) é equivalente a 736 W).
3.28regime (411-51-06)indicação das cargas às quais a máquina é submetida, incluindo, se aplicável, períodos de partida, de frenagem elétrica, de funcionamento em vazio e de repouso, bem como as suas durações e a sua seqüência no tempo
3.29regime-tipo (411-51-13)regime contínuo, de tempo limitado ou periódico, incluindo uma ou mais cargas que permanecem constantes para a duração especificada, ou regime não periódico no qual geralmente a carga e a velocidade variam em uma faixa de funcionamento admissível
3.30repouso (411-51-03)ausência completa de todo movimento e de toda alimentação elétrica ou de todo acionamento mecânico
3.31resfriamento (411-44-01)processo pelo qual o calor resultante das perdas que ocorrem em uma máquina é transferido para um fluido refrigerante primário, o qual pode ser continuamente renovado ou resfriado por um fluido refrigerante secundário em um trocador de calor
3.32tensão nominalUN
tensão de linha nos terminais da máquina à qual são referidas as outras características nominais
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
6 © ABNT 2008 - Todos os direitos reservados
3.33tolerânciadesvio permitido entre o valor declarado de uma grandeza e o valor medido
3.34valor de plena carga (411-51-11)valor de uma grandeza para uma máquina funcionando a plena carga
NOTA Este conceito é aplicável à potência, ao conjugado, à corrente, à velocidade etc.
3.35valor nominal (411-51-23)valor de uma grandeza atribuído, geralmente pelo fabricante, a uma condição de funcionamento especificada de uma máquina
NOTA A tensão nominal ou faixa da tensão nominal é o valor da tensão de linha entre os terminais da máquina.
3.36potência aparente com rotor bloqueadopotência aparente de entrada com o motor bloqueado sob tensão e freqüência nominais
4 Regimes
4.1 Especificação de um regime
É responsabilidade do comprador definir o tipo de regime. O comprador pode descrever o regime por um dos seguintes métodos:
a) numericamente, quando a carga não variar ou variar de forma conhecida;
b) graficamente, por um gráfico das grandezas variáveis em função do tempo;
c) pela seleção de um dos tipos de regime S1 a S10 que não sejam menos severos que o regime real.
O tipo de regime deve ser designado pela abreviação apropriada, especificada em 4.2.
Uma expressão para o fator de duração do ciclo é dada na figura do tipo de regime correspondente.
Normalmente o comprador não pode prever os valores de momento de inércia do motor (JM) ou a expectativa de vida térmica relativa (TL) para o regime de serviço S10 (ver Anexo B). Estes valores são informados pelo fabricante.
Quando o comprador não declarar o tipo de regime, o fabricante deve considerar que o tipo de regime S1 (regime contínuo) seja aplicado.
4.2 Tipos de regimes
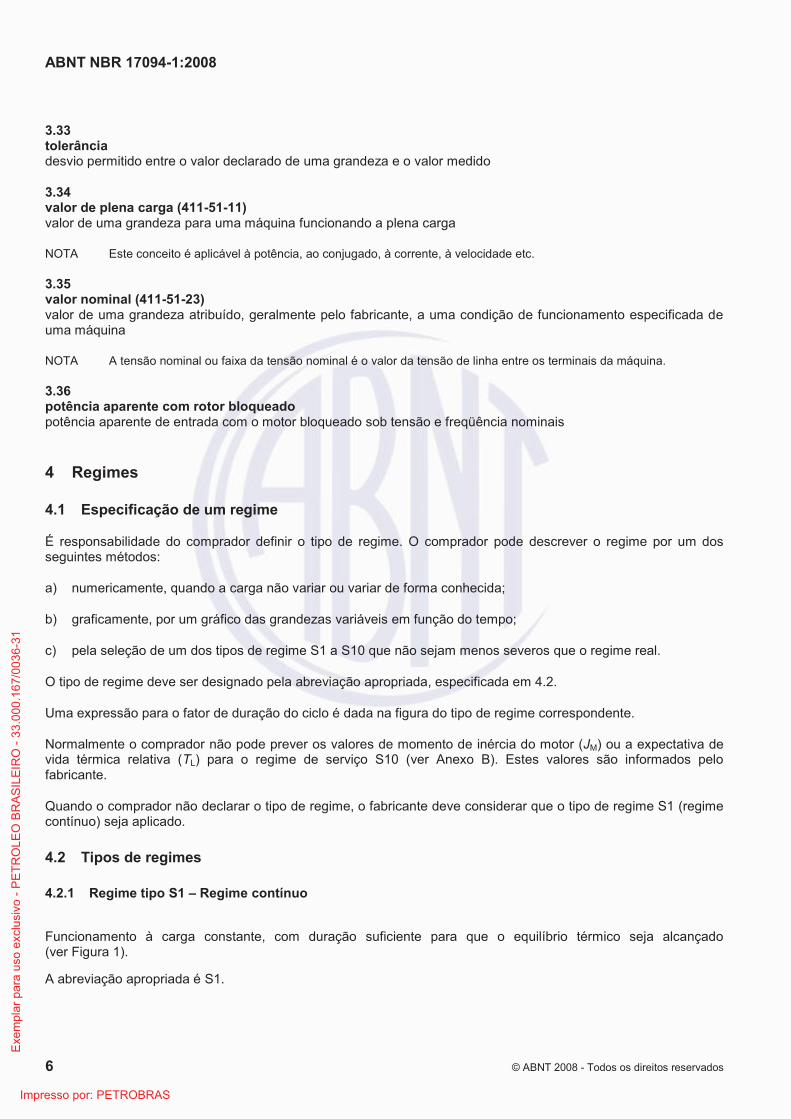
4.2.1 Regime tipo S1 – Regime contínuo
Funcionamento à carga constante, com duração suficiente para que o equilíbrio térmico seja alcançado (ver Figura 1).
A abreviação apropriada é S1.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 7
t
t
t
max
PV
P
Legenda
P carga
Pv perdas elétricas
temperatura
max temperatura máxima atingida durante o ciclo
t tempo
Figura 1 — Regime contínuo – Regime tipo S1
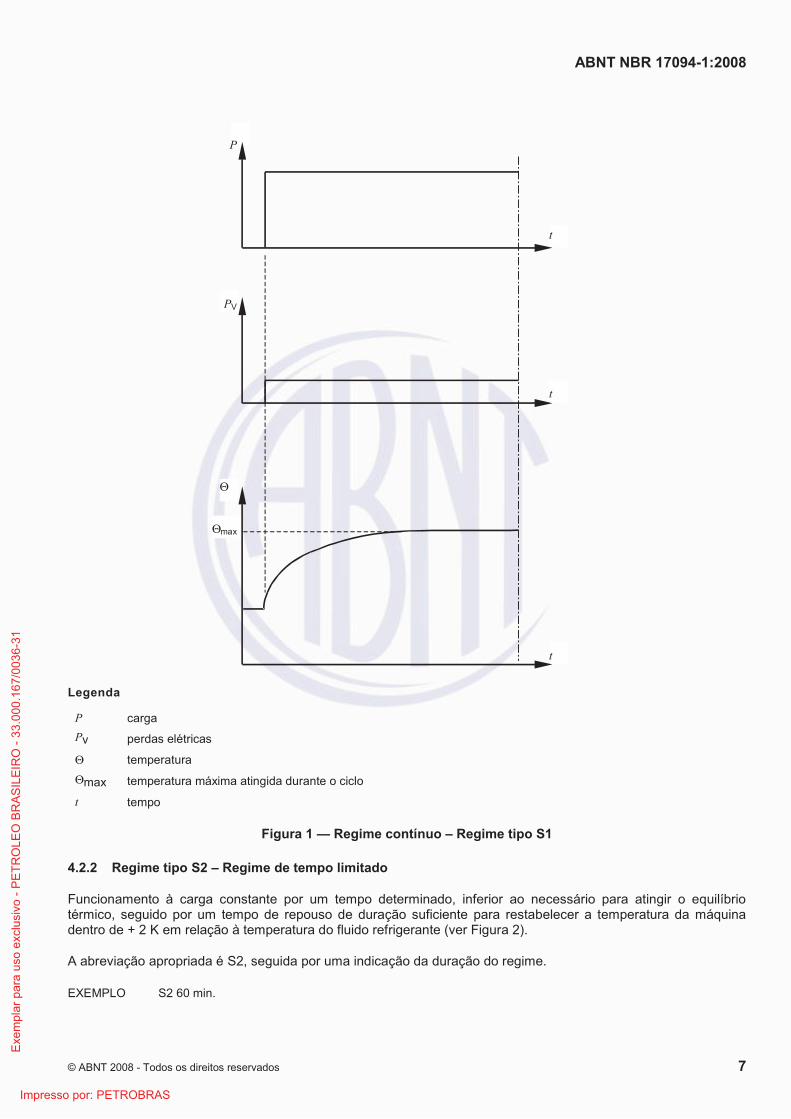
4.2.2 Regime tipo S2 – Regime de tempo limitado
Funcionamento à carga constante por um tempo determinado, inferior ao necessário para atingir o equilíbrio térmico, seguido por um tempo de repouso de duração suficiente para restabelecer a temperatura da máquina dentro de + 2 K em relação à temperatura do fluido refrigerante (ver Figura 2).
A abreviação apropriada é S2, seguida por uma indicação da duração do regime.
EXEMPLO S2 60 min.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
8 © ABNT 2008 - Todos os direitos reservados
tP
P
PV
max
t
t
t
Legenda
P carga
Pv perdas elétricas
temperatura
max temperatura máxima atingida durante o ciclo
t tempo
tp tempo em funcionamento à carga constante
Figura 2 — Regime de tempo limitado – Regime tipo S2
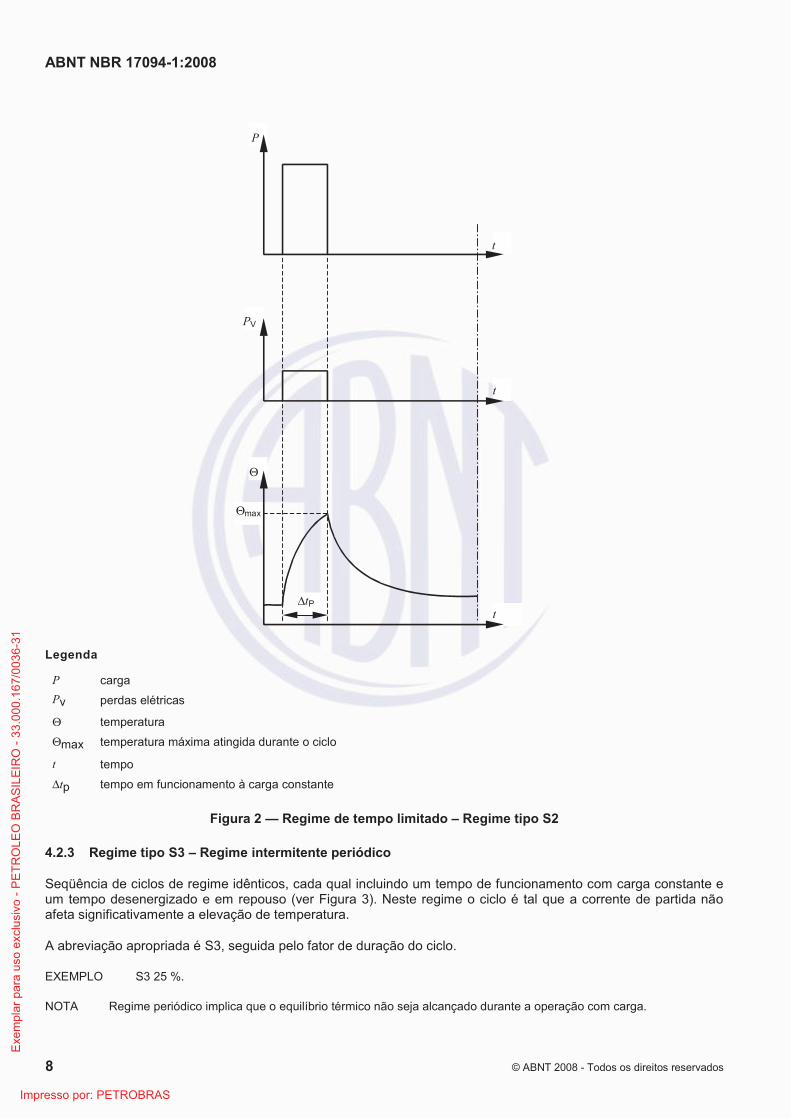
4.2.3 Regime tipo S3 – Regime intermitente periódico
Seqüência de ciclos de regime idênticos, cada qual incluindo um tempo de funcionamento com carga constante e um tempo desenergizado e em repouso (ver Figura 3). Neste regime o ciclo é tal que a corrente de partida não afeta significativamente a elevação de temperatura.
A abreviação apropriada é S3, seguida pelo fator de duração do ciclo.
EXEMPLO S3 25 %.
NOTA Regime periódico implica que o equilíbrio térmico não seja alcançado durante a operação com carga.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 9
TC
tP
P
PV
max
t
t
t
tR
Legenda
P carga
Pv perdas elétricas
temperatura
max temperatura máxima atingida durante o ciclo
t tempo
Tc duração de um ciclo
tp tempo de funcionamento à carga constante
tR tempo desenergizado e em repouso
Fator de duração do ciclo = tP/Tc
Figura 3 — Regime intermitente periódico – Regime tipo S3
4.2.4 Regime tipo S4 – Regime intermitente periódico com partidas
Seqüência de ciclos de regime idênticos, cada qual incluindo um tempo de partida significativo, um tempo de funcionamento com carga constante e um tempo de repouso (ver Figura 4).
A abreviação apropriada é S4, seguida pelo fator de duração do ciclo, pelo momento de inércia do motor (JM) e pelo momento de inércia da carga (Jext), ambos referidos ao eixo do motor.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
10 © ABNT 2008 - Todos os direitos reservados
EXEMPLO S4 25 % JM = 0,15 kg.m2Jext = 0,7 kg.m2
NOTA Regime periódico implica que o equilíbrio térmico não seja alcançado durante a operação com carga.
TC
tPPV
P
max
t
t
t
tR
tD
Legenda
P carga Tc duração de um ciclo
Pv perdas elétricas tD tempo de aceleração/ partida
temperatura tp tempo de funcionamento à carga constante
max temperatura máxima atingida durante o ciclo tR tempo desenergizado e em repouso
t tempo
Fator de duração do ciclo = ( tD + tp)/Tc
Figura 4 — Regime intermitente periódico com partida – Regime tipo S4
4.2.5 Regime tipo S5 – Regime intermitente periódico com frenagem elétrica
Seqüência de ciclos de regime idênticos, cada qual incluindo um tempo de partida, um tempo de funcionamento à carga constante, um tempo de frenagem elétrica rápida e um tempo desenergizado e em repouso (ver Figura 5).
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 11
A abreviação apropriada é S5, seguida pelo fator de duração do ciclo, pelo momento de inércia do motor (JM) e pelo momento de inércia da carga (Jext), ambos referidos ao eixo do motor.
EXEMPLO S5 25 % JM = 0,15 kg.m2Jext = 0,7 kg.m2
NOTA Regime periódico implica que o equilíbrio térmico não seja alcançado durante a operação com carga.
tF
max
t
t
t
PTC
PVtP tR
tD
Legenda
P carga Tc duração de um ciclo
Pv perdas elétricas tD tempo de aceleração/ partida
temperatura tP tempo de funcionamento à carga constante
max temperatura máxima atingida durante o ciclo tF tempo de frenagem elétrica
t tempo tR tempo desenergizado e em repouso
Fator de duração do ciclo = ( tD + tp + tF)/Tc
Figura 5 — Regime intermitente periódico com frenagem elétrica – Regime tipo S5
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
12 © ABNT 2008 - Todos os direitos reservados
4.2.6 Regime tipo S6 - Regime de funcionamento contínuo periódico com carga intermitente
Seqüência de ciclos de regime idênticos, cada qual incluindo um tempo de funcionamento à carga constante e um tempo de funcionamento em vazio. Não existe tempo desenergizado e em repouso (ver Figura 6).
A abreviação apropriada é S6, seguida pelo fator de duração do ciclo.
EXEMPLO S6 40 %
NOTA Regime periódico implica que o equilíbrio térmico não seja alcançado durante a operação com carga.
TC
tP
P
PV
max
t
t
t
tV
Legenda
P carga t tempo
Pv perdas elétricas Tc duração de um ciclo
temperatura tp tempo de funcionamento à carga constante
max temperatura máxima atingida durante o ciclo tv tempo de funcionamento em vazio
Fator de duração do ciclo = tp/Tc
Figura 6 — Regime de funcionamento contínuo periódico com carga intermitente – Regime tipo S6
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 13
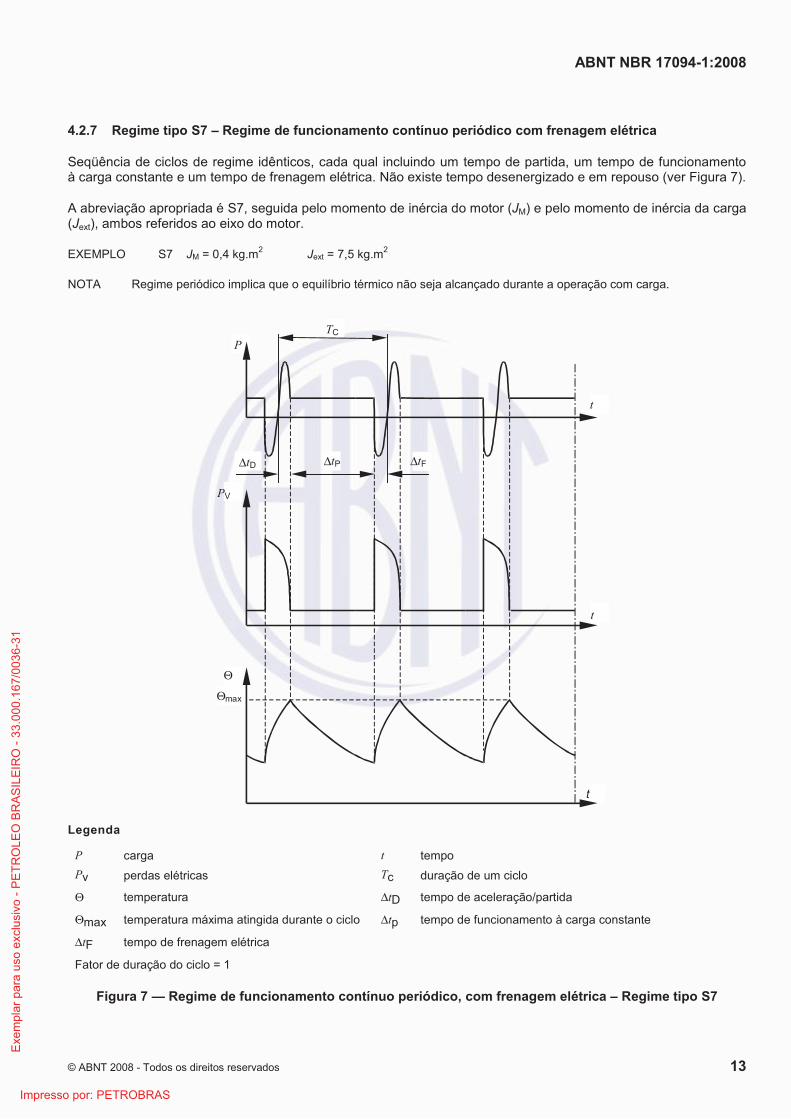
4.2.7 Regime tipo S7 – Regime de funcionamento contínuo periódico com frenagem elétrica
Seqüência de ciclos de regime idênticos, cada qual incluindo um tempo de partida, um tempo de funcionamento à carga constante e um tempo de frenagem elétrica. Não existe tempo desenergizado e em repouso (ver Figura 7).
A abreviação apropriada é S7, seguida pelo momento de inércia do motor (JM) e pelo momento de inércia da carga (Jext), ambos referidos ao eixo do motor.
EXEMPLO S7 JM = 0,4 kg.m2Jext = 7,5 kg.m2
NOTA Regime periódico implica que o equilíbrio térmico não seja alcançado durante a operação com carga.
P
tD
TC
t
t
t
max
PV
tP tF
Legenda
P carga t tempo
Pv perdas elétricas Tc duração de um ciclo
temperatura tD tempo de aceleração/partida
max temperatura máxima atingida durante o ciclo tp tempo de funcionamento à carga constante
tF tempo de frenagem elétrica
Fator de duração do ciclo = 1
Figura 7 — Regime de funcionamento contínuo periódico, com frenagem elétrica – Regime tipo S7
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
14 © ABNT 2008 - Todos os direitos reservados
4.2.8 Regime tipo S8 – Regime de funcionamento contínuo periódico com mudanças correspondentes de carga e de velocidade
Seqüência de ciclos de regime idênticos, cada qual incluindo um tempo de funcionamento à carga constante correspondente a uma determinada velocidade de rotação, seguido de um ou mais tempos de funcionamento a outras cargas constantes correspondentes a diferentes velocidades de rotação (realizados, por exemplo, pela mudança do número de pólos, no caso de motores de indução). Não existe tempo desenergizado e em repouso (ver Figura 8).
A abreviação apropriada é S8, seguida pelo momento de inércia do motor (JM) e pelo momento de inércia da carga (Jext), ambos referidos ao eixo do motor, juntamente com a carga, velocidade e fator de duração do ciclo para cada condição de velocidade.
EXEMPLO S8 JM = 0,5 kg.m2Jext = 6 kg.m2 16kW 740 rpm 30 %
40kW 1460 rpm 30 %
25kW 980 rpm 40 %
NOTA Regime periódico implica que o equilíbrio térmico não seja alcançado durante a operação com carga.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 15
TCP
tDPV
max
n
t
t
t
t
tP1 tF1tF2
tP2 tP3
Legenda
P carga t tempo
Pv perdas elétricas Tc duração de um ciclo
temperatura tD tempo de aceleração/partida
max temperatura máxima atingida durante o ciclo tp tempo de funcionamento à carga constante
n velocidade tF tempo de frenagem elétrica
Fator de duração do ciclo = ( tD + tp1)/Tc; ( tF1 + tp2)/Tc; ( tF2 + tp3)/Tc
Figura 8 — Regime de funcionamento contínuo periódico, com mudanças correspondentesde carga e de velocidade – Regime tipo S8
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
16 © ABNT 2008 - Todos os direitos reservados
4.2.9 Regime tipo S9 – Regime com variações não periódicas de carga e de velocidade
Regime no qual geralmente a carga e a velocidade variam não periodicamente, dentro da faixa de funcionamento admissível. Este regime inclui freqüentemente sobrecargas aplicadas que podem ser muito superiores à carga de referência (ver Figura 9).
A abreviação apropriada é S9.
Para este tipo de regime, uma carga constante apropriadamente selecionada e baseada no regime tipo S1 é tomada como carga de referência (“Pref” na Figura 9) para o conceito de sobrecarga.
t
t
t
t
PV
P
n
tP
Pref
max
tF
tDtR
tS
IEC 334/04
Legenda
P carga t tempo
Pref carga de referência tD tempo de aceleração/ partida
Pv perdas elétricas tp tempo de funcionamento à carga constante
temperatura tF tempo de frenagem elétrica
max temperatura máxima atingida durante o ciclo tR tempo desenergizado e em repouso
n velocidade ts tempo de funcionamento com sobrecarga
Figura 9 — Regime com variações não periódicas de carga e velocidade – Regime tipo S9
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 17
4.2.10 Regime tipo S10 – Regime com cargas e velocidades constantes distintas
Regime consistindo em um número específico de valores distintos de cargas (ou cargas equivalentes) e, se aplicável, velocidade, sendo cada combinação carga/velocidade mantido por um tempo suficiente para permitir que a máquina alcance o equilíbrio térmico (ver Figura 10). A carga mínima durante um ciclo de regime pode ter o valor zero (funcionamento em vazio ou repouso desenergizado).
A abreviação apropriada é S10, seguida pelo valor por unidade (pu) p/!t para a carga e sua duração respectiva e pelo valor por unidade TL para a expectativa de vida térmica relativa do sistema de isolação. O valor de referência para a expectativa de vida térmica é a expectativa de vida térmica na condição nominal para regime de operação contínuo e no limite permitido de elevação de temperatura baseado no regime tipo S1. Para um período de repouso, a carga deve ser indicada pela letra “r”.
NOTA pi = Pi / Pn = carga em p.u.
EXEMPLO S10 p/!t = 1,1/0,4 ; 1/0,3 ; 0,9/0,2 ; r/0,1 TL = 0,6
O valor de TL deve ser arredondado para um valor múltiplo de 0,05. Informações sobre o significado deste parâmetro e a determinação de seu valor são dadas no Anexo B.
Para este tipo de regime, uma carga constante adequadamente escolhida e baseada no regime tipo S1 deve ser tomada como carga de referência (“Pref” na Figura 10) para as cargas distintas. Na conversão para valores em p.u., considerar para p e t os valores de base Pref e TC, respectivamente.
NOTA Os valores distintos de carga são usualmente cargas equivalentes, baseadas na integração de valores em um período de tempo. Não é necessário que cada ciclo de cargas seja exatamente o mesmo, mas somente que cada carga dentro de um ciclo seja aplicada por tempo suficiente para que o equilíbrio térmico seja atingido, e que cada ciclo de cargas possa ser integrado para dar a mesma expectativa de vida térmica.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
18 © ABNT 2008 - Todos os direitos reservados
Pref
PV
ref
P
1
t
t
t
t1
TC
t
n
t2 t3 t4
P1 P2 P3
P4
2
4
Legenda
P carga t tempo
Pi carga constante de um período de carga dentro de um ciclo de cargas
ti tempo de uma carga constante dentro de um ciclo
Pref carga de referência baseado no regime tipo S1 Tc duração de um ciclo
Pv perdas elétricas i diferença entre a elevação de temperatura do enrolamento para cada variação de carga dentro de um ciclo, e a elevação de temperatura baseada no regime tipo S1 com carga de referência
temperatura
ref temperatura na carga de referência baseado no regime tipo S1
n velocidade
Figura 10 — Regime com cargas constantes distintas – Regime tipo S10
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 19
5 Características nominais
5.1 Declaração das características nominais
As características nominais, como definido em 3.1, devem ser atribuídas pelo fabricante. Na declaração das características nominais o fabricante deve selecionar uma das classes de características nominais definidas em 5.2.1 a 5.2.6. A designação da classe de característica nominal deve ser escrita após a potência nominal.Se nenhuma característica for anotada, características nominais para regime contínuo são aplicadas.
Quando componentes acessórios (tais como reatores, capacitores etc.) são conectados pelo fabricante como parte da máquina, os valores das características nominais devem se referir aos terminais de alimentação de todo o conjunto.
NOTA Isto não se aplica a transformadores de potência conectados entre a máquina e a fonte de alimentação.
Considerações especiais são requeridas quando são definidas as características nominais para máquinas alimentadas a partir de conversores estáticos. As IEC 60034-17 e IEC 60034-25 dão orientações para o caso de motores de indução de gaiola cobertos por esta parte da ABNT NBR 17094
5.2 Classes de características nominais
5.2.1 Características nominais para regime contínuo
Características nominais com as quais a máquina pode ser operada por um período ilimitado, e em conformidade com os requisitos desta Norma.
Esta classe de características nominais corresponde ao regime tipo S1 e é designada como regime tipo S1.
5.2.2 Características nominais para regime de tempo limitado
Características nominais com as quais a máquina pode ser operada por um período limitado, partindo à temperatura ambiente, e em conformidade com os requisitos desta parte da ABNT NBR 17094.
Esta classe de características nominais corresponde ao regime tipo S2 e é designada como regime tipo S2.
5.2.3 Características nominais para regime periódico
Características nominais com as quais a máquina pode ser operada no regime de ciclos, e em conformidade com os requisitos desta parte da ABNT NBR 17094
Esta classe de características nominais corresponde a um dos regimes periódicos tipo S3 a S8 e é designada como o regime tipo correspondente.
A menos que especificado ao contrário, a duração de um ciclo de regime deve ser de 10 min e o fator de duração do ciclo deve ter um dos seguintes valores: 15 %, 25 %, 40 % ou 60 %.
5.2.4 Características nominais para regime não periódico
Características nominais com as quais a máquina pode ser operada não periodicamente, e em conformidade com os requisitos desta Norma.
Esta classe de características nominais corresponde ao regime tipo S9 e é designada como regime tipo S9.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
20 © ABNT 2008 - Todos os direitos reservados
5.2.5 Características nominais para regime com cargas e velocidades constantes distintas
Características nominais com as quais a máquina pode ser operada com a associação de cargas e velocidades do regime tipo S10 por um período ilimitado de tempo, e em conformidade com os requisitos desta parte daABNT NBR 17094. A máxima carga permitida no ciclo deve levar em consideração todas as partes do motor como,por exemplo, a expectativa de vida térmica relativa do sistema de isolação, a temperatura dos rolamentos e a dilatação térmica de outras partes. A menos que especificado em comum acordo entre fabricante e comprador, a carga máxima não deve exceder 1,15 vez o valor da carga baseado no regime tipo S1. A carga mínima pode ter o valor zero, com máquina operando a vazio ou estando em repouso. Considerações para a aplicação desta classe de características nominais são apresentadas no Anexo B.
Esta classe de características nominais corresponde ao tipo de regime S10 e é designada como regime tipo S10.
NOTA Outras normas podem especificar a carga máxima em termos de limite de temperatura ou elevação de temperatura do enrolamento no lugar de carga relativa, por unidade (pu), baseado no regime tipo S1.
5.2.6 Características nominais para carga equivalente
Características nominais, para o propósito de ensaios, com as quais a máquina pode ser operada em carga constante até alcançar o equilíbrio térmico e que resulta na mesma elevação de temperatura do enrolamento do estator que a elevação da temperatura média durante um ciclo de carga do regime tipo especificado.
NOTA A determinação de uma característica nominal equivalente deve considerar a variação da carga, velocidade e resfriamento do ciclo do regime.
Esta classe de características nominais, se aplicada, é designada “equ”.
5.3 Seleção de uma classe de características nominais
Um motor fabricado para aplicação geral deve ter características nominais para regime de operação contínuo e ser capaz de funcionar no regime tipo S1.
Se o regime não for especificado pelo comprador, aplica-se o regime tipo S1 e as características nominais atribuídas devem ser para regime contínuo.
Quando um motor tiver características nominais para regime de tempo limitado, elas devem ser baseadas no tipo de regime S2 (ver 4.2.2).
Quando um motor for destinado a acionar cargas variáveis, ou cargas incluindo um período de funcionamento em vazio ou períodos de repouso, as características nominais devem ser para regime periódico, baseada em um dos tipos de regimes S3 a S8 (ver 4.2.3 a 4.2.8).
Quando um motor for destinado a acionar não periodicamente cargas variáveis a velocidades variáveis, incluindo sobrecargas, as características nominais devem ser para regime não periódico, baseada no tipo de regime S9(ver 4.2.9).
Quando um motor for destinado a acionar cargas constantes distintas, incluindo períodos de sobrecarga ou períodos de funcionamento em vazio (ou períodos de repouso), as características nominais devem ser para regime com cargas constantes distintas, baseadas no tipo de regime S10 (ver 4.2.10).
5.4 Atribuição da potência a uma classe de características nominais
Na determinação das características nominais, procede-se como a seguir:
a) para tipos de regime S1 a S8, o(s) valor(es) especificado(s) da(s) carga(s) constante(s) deve(m) ser a(s) potência(s) nominal(is) (ver 4.2.1 a 4.2.8);
b) para tipos de regime S9 e S10, o valor de referência da carga baseado no tipo de regime S1 deve ser considerado a potência nominal (ver 4.2.9 e 4.2.10).
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 21
5.5 Potência nominal
A potência nominal é a potência mecânica disponível no eixo e deve ser expressa em Watts (W) ou seus múltiplos.
NOTA 1 É prática em alguns países expressar a potência mecânica disponível no eixo do motor em horse-power(1 hp é equivalente a 746 W; 1 cv (cavalo-vapor) é equivalente a 736 W).
NOTA 2 Os valores preferenciais da potência nominal são escolhidos conforme a ABNT NBR 5432. Quando para motores de um tipo particular existir norma específica, os valores da potência nominal estão de acordo com o especificado nela.
5.6 Máquinas com mais de uma característica nominal
Para máquinas com mais de uma característica nominal, a máquina deve estar de acordo com esta parte daABNT NBR 17094 em todos os aspectos para cada condição nominal.
Para motores de múltiplas velocidades, uma característica nominal deve ser definida para cada velocidade.
Quando uma grandeza nominal (potência, tensão, velocidade etc.) puder assumir vários valores ou variar continuamente entre dois limites, as características nominais devem ser estabelecidas para estes valores ou limites. Esta situação não se aplica para variação de tensão e freqüência durante a operação conforme definido em 7.3 ou quando sistemas de partida forem utilizados.
6 Condições de funcionamento no local de instalação
6.1 Generalidades
A menos que especificado ao contrário, os motores devem ser adequados para as seguintes condições de funcionamento no local de instalação. Para condições de funcionamento diferentes, são dadas correções na Seção 8.
6.2 Altitude
Altitude não superior a 1 000 m acima do nível do mar.
6.3 Máxima temperatura do ar ambiente
Temperatura do ar no local de funcionamento não deve ser superior a 40 °C.
6.4 Mínima temperatura do ar ambiente
6.4.1 A temperatura do ar no local de funcionamento não deve ser inferior a – 15 °C para qualquer máquina, exceto as mencionadas em 6.4.2.
6.4.2 A temperatura do ar no local de funcionamento não deve ser inferior a 0 °C para máquinas com uma ou mais características abaixo:
a) potência nominal superior a 3,3 kW/rpm;
b) potência nominal inferior a 600 W;
c) mancal de deslizamento;
d) água como fluido refrigerante primário ou secundário.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
22 © ABNT 2008 - Todos os direitos reservados
6.5 Temperatura da água como fluido de resfriamento
A temperatura da água de resfriamento na entrada da máquina ou do trocador de calor ou a água ambiente(no caso de máquinas submersíveis com resfriamento através da superfície externa e máquinas com resfriamento por envoltória de água) não deve ultrapassar + 25 °C nem ser inferior a + 5 °C.
6.6 Estocagem e transporte
Quando são esperadas temperaturas abaixo do especificado em 6.4 durante o transporte, estocagem ou após a instalação, o comprador deve informar ao fabricante e especificar a temperatura mínima esperada.
7 Condições elétricas de funcionamento
7.1 Alimentação elétrica
Os motores de indução abrangidos por esta parte da ABNT NBR 17094 devem ser adequados para a freqüência de 60 Hz.
Para tensão nominal dos motores trifásicos, recomenda-se uma das seguintes:
220 V1), 380 V2
7.2 Forma e simetria de tensões e correntes
), 440 V, 2 300 V, 4 000 V, 6 600 V e 13 200 V.
Para um motor de corrente alternada alimentado por conversor estático, as restrições na tensão, freqüência e forma de onda não se aplicam. Neste caso, as tensões nominais devem ser definidas através de acordo entre comprador e fabricante.
7.2.1 Motores de indução para uso em sistema de potência de freqüência fixa, alimentado por um gerador c.a. (local ou por rede de fornecimento), devem estar aptos a operar numa tensão de fornecimento tendo um fator harmônico de tensão (FHV) que não exceda:
0,02 para motores monofásicos e motores trifásicos, incluindo motores síncronos, mas excluindo motores de categoria N (ver IEC 60034-12), a menos que o fabricante declare o contrário;
0,03 para motores categoria N.
O FHV deve ser calculado usando a seguinte expressão:
k
n n
uFHV
2
2n
onde:
un é o valor por unidade do harmônico de tensão (referido à tensão nominal UN);
n é a ordem do harmônico (não divisível por três, no caso de motores trifásicos).
K = 13
1)Estas tensões constam na Tabela 4 da Resolução nº 505, de 26 de novembro de 2001, da Agência Nacional de Energia
Elétrica - ANEEL.2)
Estas tensões constam na Tabela 4 da Resolução nº 505, de 26 de novembro de 2001, da Agência Nacional de Energia Elétrica - ANEEL.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 23
Motores trifásicos de corrente alternada devem estar aptos para operar num sistema de tensões trifásicas tendo uma componente de seqüência negativa que não exceda 1 % da componente de seqüência positiva durante um período prolongado, ou 1,5 % durante um período curto, não superior a alguns minutos, e uma componente de seqüência zero que não exceda 1 % da componente de seqüência positiva.
Se os limites de deformação e de desequilíbrio ocorrerem simultaneamente em funcionamento com carga nominal, a temperatura resultante no motor não deve ser prejudicial e o excesso de elevação de temperatura resultante em relação aos limites especificados nesta parte da ABNT NBR 17094 não deve ultrapassar 10 K.
NOTA Nas proximidades de grandes cargas monofásicas (como fornos de indução), e nas áreas rurais, particularmente nos sistemas mistos de indústrias e residências, os fornecimentos podem ser distorcidos além dos limites acima. Ações especiais serão então necessárias.
7.2.2 Motores de corrente alternada alimentados por conversores estáticos devem tolerar altos conteúdos de harmônicos da tensão fornecida; ver IEC 60034-17 para o caso de motores de gaiola dentro do escopo da Seção 8.
NOTA Quando a tensão de alimentação for significantemente não senoidal, por exemplo, derivada de um conversor estático, o valor eficaz da forma de onda total e da fundamental são ambos relevantes e determinam o desempenhoperformance do motor de indução.
7.3 Variações de tensão e de freqüência durante o funcionamento
Motores de indução para uso em sistema de potência de freqüência fixa, alimentado por um gerador c.a. (local ou por rede de fornecimento), com as combinações de variações de tensão e de freqüência são classificadas como zona A ou zona B, de acordo com a Figura 11.
Um motor de indução deve ser capaz de prover torque nominal continuamente dentro da zona A da Figura 11, mas pode não atender completamente às suas características de desempenho à tensão e freqüência nominais (ver ponto de características nominais na Figura 11), apresentando alguns desvios. As elevações de temperatura podem ser superiores àquelas obtidas à tensão e freqüência nominais.
Um motor de indução deve ser capaz de prover torque nominal na zona B, mas pode apresentar desvios superiores àqueles da zona A, no que se refere às características de desempenho à tensão e freqüência nominais. As elevações de temperatura podem ser superiores às verificadas com tensão e freqüência nominais e muito provavelmente superiores àquelas da zona A. O funcionamento prolongado na periferia da zona B não é recomendado.
NOTA 1 Nas condições de funcionamento reais, o motor é, às vezes, solicitado a funcionar fora do perímetro da zona A. Recomenda-se limitar tais afastamentos em valor, duração e freqüência de ocorrência. Convém tomar medidas corretivas, quando possível, dentro de um tempo razoável, como, por exemplo, uma redução de potência. Tais medidas podem evitar uma redução na vida útil do motor devido aos efeitos da temperatura.
NOTA 2 Os limites de elevação de temperatura ou de temperatura total, conforme esta parte da ABNT NBR 17094, são aplicáveis no ponto de características nominais e podem ser progressivamente excedidos à medida que o ponto de funcionamento se afasta do ponto de características nominais. Para as condições de operação nos limites da zona A, as elevações de temperatura e as temperaturas totais podem exceder aproximadamente 10 K os limites de elevação de temperatura e de temperatura total especificados nesta parte da ABNT NBR 17094.
NOTA 3 Um motor de indução somente partirá no limite inferior de tensão se seu conjugado de partida for adequadamente combinado com o conjugado resistente da carga, mas isto não é uma exigência desta seção. Para as características de partida de motores de categoria N, ver Seção 8.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
24 © ABNT 2008 - Todos os direitos reservados
1,02
1,03
1,05
0,97
0,95
0,90
1,10
0,98
1
3
2
X
Y
1,00
1,03
0,95
Legenda
1 - zona A
2 - zona B (exterior à zona A)
3 - ponto de características nominais
X - freqüência – (p.u.)
Y - tensão – (p.u.)
Figura 11 — Limites das variações de tensão e de freqüência em funcionamento
7.4 Motores de indução trifásicos operando em um sistema de neutro isolado
Devem ser capazes de funcionar continuamente com o neutro em um potencial próximo ou igual ao da terra. Também devem ser capazes de funcionar em sistemas de neutro isolado com uma fase no potencial de terra durante períodos pouco freqüentes, de curta duração, como, por exemplo, suficientes para a remoção de faltas. Caso se pretenda operar o motor continuamente ou por períodos prolongados nesta condição de funcionamento,é necessário que o nível de isolamento seja adequado para esta condição, o que deve ser definido nas instruções de operação.
Se os enrolamentos não tiverem o mesmo nível de isolamento nas extremidades de linha e de neutro, isto deve ser indicado nas instruções de operação.
NOTA O aterramento da interconexão de pontos neutros de motores não deve ser efetuado sem consultar os fabricantes, devido ao risco de circulação de componentes de seqüência zero de correntes de todas as freqüências sob certas condições de funcionamento e de possíveis danos mecânicos ao enrolamento sob condições de falta linha-neutro.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 25
7.5 Níveis de tensão suportáveis (pico e gradiente) para motores alimentados por inversor de freqüência
Para motores de indução o fabricante deve declarar os valores limites de tensão de pico e gradiente de tensão em operação contínua.
Para motores de indução de gaiola dentro do escopo da Seção 8, ver também IEC 60034-17.
Para motores de alta-tensão, ver também IEC 60034-15.
7.6 Condições de funcionamento especiais
Para condições de funcionamento diferentes daquelas indicadas na Seção 6, as correções a serem adotadas constam em 9.4.3 Quanto às condições referidas em 7.2 e 7.3, na própria seção já há informações sobre o que ocorre quando elas variam. Também a Seção 12 e o Anexo A apresentam recomendações sobre condições elétricas.
O fabricante deve ser consultado para outras condições de funcionamento especiais que possam afetar a construção ou o funcionamento do motor de indução, entre as quais estão as mencionadas em 7.6.1 a 7.6.5.
7.6.1 Exposição a:
a) poeiras combustíveis, explosivas, abrasivas ou condutoras;
b) fibras ou partículas em suspensão cujo acúmulo possa interferir com a ventilação normal;
c) emanações químicas, gases inflamáveis ou explosivos;
d) radiação nuclear;
e) vapor d’água, ar salino ou vapor de óleo;
f) atmosferas úmidas ou muito secas, infestação de insetos ou atmosferas propícias ao crescimento de fungos;
g) choque, vibração ou carga mecânica anormal proveniente de fontes externas;
h) empuxo axial ou radial anormal imposto ao eixo do motor.
7.6.2 Funcionamento em que:
a) a tensão de alimentação é desequilibrada em mais do que 1 % (ver Anexo A);
b) limites de níveis de ruído inferiores aos especificados na ABNT NBR 7565 são necessários;
c) o acionamento é feito através de correias em “V”, correias planas, correntes ou redutores;
d) a carga acionada é de elevada inércia;
e) a carga acionada é do tipo alternativo (bombas e compressores alternativos);
f) a carga acionada requer um conjugado com rotor bloqueado superior ao valor mínimo da categoria.
7.6.3 Funcionamento em velocidades diferentes da velocidade nominal.
7.6.4 Funcionamento em locais insuficientemente ventilados, em poços ou em posição inclinada.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
26 © ABNT 2008 - Todos os direitos reservados
7.6.5 Funcionamento quando sujeito a:
a) cargas que causem impacto torsional;
b) sobrecargas anormais repetitivas;
c) inversão ou frenagem elétrica;
d) partidas freqüentes;
e) partidas com tensão reduzida.
8 Características de partida
8.1 Generalidades
Esta seção apresenta as características de partida aplicáveis a cinco categorias de motores de indução de gaiola, de uma velocidade, freqüência de 60 Hz, conforme especificados em 8.2, desde que:
tenha tensão única até 1 000 V,
seja para uso com partida direta ou partida estrela-triângulo,
seja para regime tipo S1,
seja construído com qualquer grau de proteção.
Estas características de partida também são aplicáveis a motores de duas tensões, desde que o nível de saturação magnética seja o mesmo para ambas as tensões, e para motores com tipo de proteção “e – Segurança aumentada” com classe de temperatura T1 a T3, de acordo com a ABNT NBR IEC 60079-7.
NOTA 1 Não é esperado que todos os fabricantes produzam motores para todas as categorias de partidas. A escolha de uma característica específica de partida, de acordo com esta parte da ABNT NBR 17094 pode ser objeto de acordo entre fabricante e comprador.
NOTA 2 Aplicações específicas podem requerer a utilização de motores com características de partida diferentes em relação às apresentadas nesta seção. Neste caso estas características são objeto de acordo entre fabricante e comprador.
NOTA 3 Os valores de conjugado e potência aparente informados nesta parte da ABNT NBR 17094 são valores-limites (isto é, mínimo ou máximo sem tolerância), mas deve ser observado que os valores informados nos catálogos dos fabricantes podem incluir tolerâncias de acordo com a Seção 24.
NOTA 4 Os valores tabelados para potência aparente com rotor bloqueado são baseados no valor eficaz da corrente de rotor bloqueado; no acionamento do motor existirá uma corrente de pico instantânea assimétrica de meio ciclo que poderá variar de 1,8 a 2,8 vezes o valor da corrente com rotor bloqueado. O pico da corrente e o tempo de decaimento são uma função do projeto do motor e do ângulo de chaveamento.
8.2 Motores de indução de gaiola, trifásicos, para tensão nominal igual ou inferior a 1 000 V, potência nominal igual ou inferior a 1 600 kW e previstos para partida direta (categorias N, H e D) ou partida estrela-triângulo (NY, HY)
Estes motores são classificados quanto ao projeto das características de partida em cinco categorias, cujos parâmetros estão indicados em 8.2.1 a 8.2.5.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 27
8.2.1 Motores de categoria N
Esta categoria inclui os motores com conjugado de partida normal, previstos para partida direta, com 2, 4, 6 ou 8 pólos e de 0,37 kW a 1 600 kW.
8.2.1.1 Conjugado de partida
O conjugado de partida, representado pelo conjugado com rotor bloqueado (Cp), pelo conjugado mínimo de partida (Cmin) e pelo conjugado máximo (Cmáx), cada um expresso pela razão para o conjugado nominal (Cn), deve ter seus valores mínimos à tensão nominal, conforme a Tabela 1 ou a Tabela 5. Valores superiores são permitidos.
O conjugado de partida, a qualquer velocidade entre zero e a velocidade correspondente ao conjugado máximo, não deve ser inferior a 1,3 vez o conjugado resistente de uma carga que varia com o quadrado da velocidade, passando pelo ponto de conjugado nominal do motor.
No entanto, para motores de dois pólos com tipo de proteção “Ex e” (segurança aumentada), com potência nominal maior que 100 kW, o conjugado de partida, a qualquer velocidade entre zero e a velocidade correspondente ao conjugado máximo, não deve ser inferior a 1,3 vez o conjugado resistente de uma carga que varia com o quadrado da velocidade e deve passar pelo ponto correspondente a 70 % do conjugado nominal do motor. Para estes motores as características de conjugado devem estar de acordo com os valores apresentados na Tabela 5.
NOTA O fator 1,3 foi escolhido para levar em conta uma queda de tensão de 10 % da tensão nominal nos terminais do motor durante o período de aceleração.
8.2.1.2 Potência aparente com rotor bloqueado
A potência aparente com rotor bloqueado (Sp) é a potência aparente de entrada expressa pela razão para a potência de saída nominal (Pn). Este valor não deve ser superior ao valor correspondente indicado nas Tabelas 2 e 6. Os valores informados nas Tabelas 2 e 6 são independentes do número de pólos e são valores máximos à tensão nominal. Para motores com tipo de proteção “Ex e” (segurança aumentada), o valor da potência aparente com rotor bloqueado deve estar de acordo com os valores informados na Tabela 6.
8.2.1.3 Requisitos de partida
Os motores devem ser capazes de suportar duas partidas consecutivas a frio (com retorno ao repouso entre partidas), e uma partida a quente após ter funcionado nas condições nominais. O conjugado resistente devido à carga acionada é proporcional ao quadrado da velocidade, passando pelo ponto de conjugado nominal do motor, para um momento de inércia externo dado na Tabela 3 ou 7.
Em cada caso, uma partida adicional é permitida somente se a temperatura do motor antes da partida não exceder a temperatura de equilíbrio térmico sob carga nominal.
No entanto, para motores de dois pólos com tipo de proteção “Ex e” (segurança aumentada), com potência nominal maior que 100 kW, o conjugado resistente devido à carga acionada é proporcional ao quadrado da velocidade e igual a 70 % do conjugado nominal do motor, para um momento de inércia externo dado na Tabela 7. Após esta partida, carga com conjugado nominal é permitida.
NOTA O número de partidas deve ser reduzido ao mínimo, visto que afeta a vida útil do motor.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
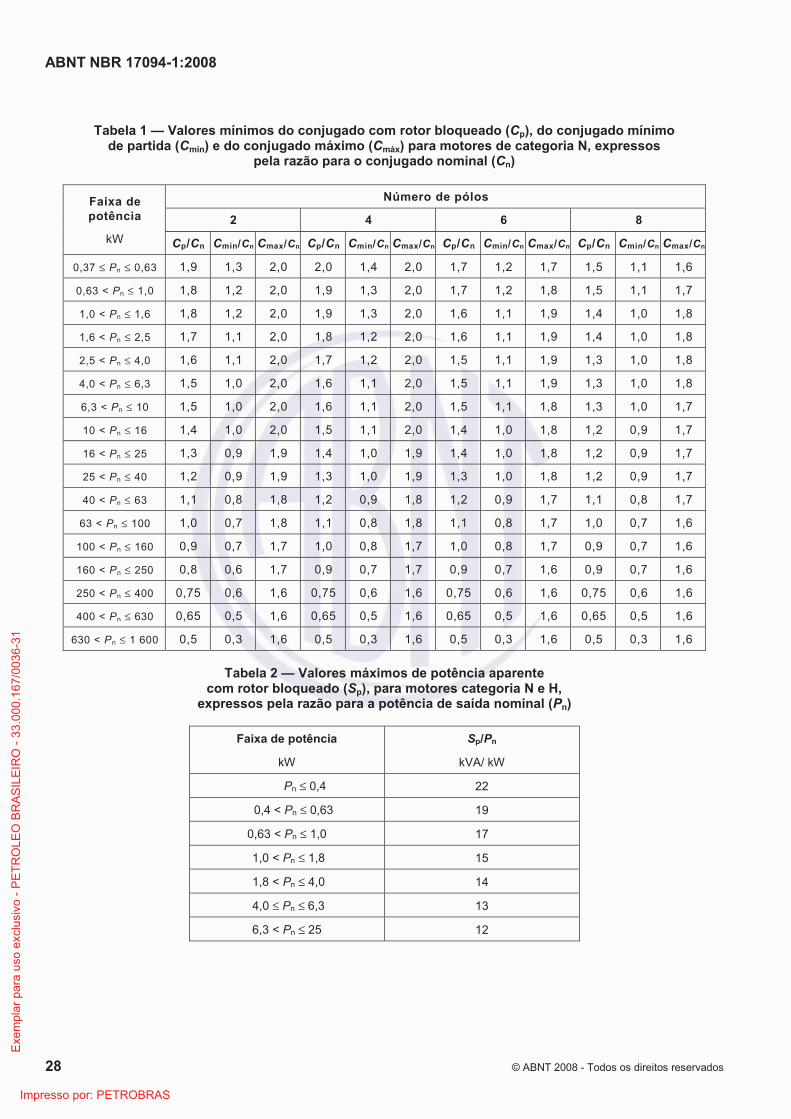
ABNT NBR 17094-1:2008
28 © ABNT 2008 - Todos os direitos reservados
Tabela 1 — Valores mínimos do conjugado com rotor bloqueado (Cp), do conjugado mínimode partida (Cmín) e do conjugado máximo (Cmáx) para motores de categoria N, expressos
pela razão para o conjugado nominal (Cn)
Faixa de potência
kW
Número de pólos
2 4 6 8
Cp/Cn Cmín/Cn Cmax/Cn Cp/Cn Cmín/Cn Cmax/Cn Cp/Cn Cmín/Cn Cmax/Cn Cp/Cn Cmín/Cn Cmax/Cn
0,37 Pn 0,63 1,9 1,3 2,0 2,0 1,4 2,0 1,7 1,2 1,7 1,5 1,1 1,6
0,63 < Pn 1,0 1,8 1,2 2,0 1,9 1,3 2,0 1,7 1,2 1,8 1,5 1,1 1,7
1,0 < Pn 1,6 1,8 1,2 2,0 1,9 1,3 2,0 1,6 1,1 1,9 1,4 1,0 1,8
1,6 < Pn 2,5 1,7 1,1 2,0 1,8 1,2 2,0 1,6 1,1 1,9 1,4 1,0 1,8
2,5 < Pn 4,0 1,6 1,1 2,0 1,7 1,2 2,0 1,5 1,1 1,9 1,3 1,0 1,8
4,0 < Pn 6,3 1,5 1,0 2,0 1,6 1,1 2,0 1,5 1,1 1,9 1,3 1,0 1,8
6,3 < Pn 10 1,5 1,0 2,0 1,6 1,1 2,0 1,5 1,1 1,8 1,3 1,0 1,7
10 < Pn 16 1,4 1,0 2,0 1,5 1,1 2,0 1,4 1,0 1,8 1,2 0,9 1,7
16 < Pn 25 1,3 0,9 1,9 1,4 1,0 1,9 1,4 1,0 1,8 1,2 0,9 1,7
25 < Pn 40 1,2 0,9 1,9 1,3 1,0 1,9 1,3 1,0 1,8 1,2 0,9 1,7
40 < Pn 63 1,1 0,8 1,8 1,2 0,9 1,8 1,2 0,9 1,7 1,1 0,8 1,7
63 < Pn 100 1,0 0,7 1,8 1,1 0,8 1,8 1,1 0,8 1,7 1,0 0,7 1,6
100 < Pn 160 0,9 0,7 1,7 1,0 0,8 1,7 1,0 0,8 1,7 0,9 0,7 1,6
160 < Pn 250 0,8 0,6 1,7 0,9 0,7 1,7 0,9 0,7 1,6 0,9 0,7 1,6
250 < Pn 400 0,75 0,6 1,6 0,75 0,6 1,6 0,75 0,6 1,6 0,75 0,6 1,6
400 < Pn 630 0,65 0,5 1,6 0,65 0,5 1,6 0,65 0,5 1,6 0,65 0,5 1,6
630 < Pn 1 600 0,5 0,3 1,6 0,5 0,3 1,6 0,5 0,3 1,6 0,5 0,3 1,6
Tabela 2 — Valores máximos de potência aparentecom rotor bloqueado (Sp), para motores categoria N e H,
expressos pela razão para a potência de saída nominal (Pn)
Faixa de potência
kW
Sp/Pn
kVA/ kW
Pn 0,4 22
0,4 < Pn 0,63 19
0,63 < Pn 1,0 17
1,0 < Pn 1,8 15
1,8 < Pn 4,0 14
4,0 Pn 6,3 13
6,3 < Pn 25 12
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
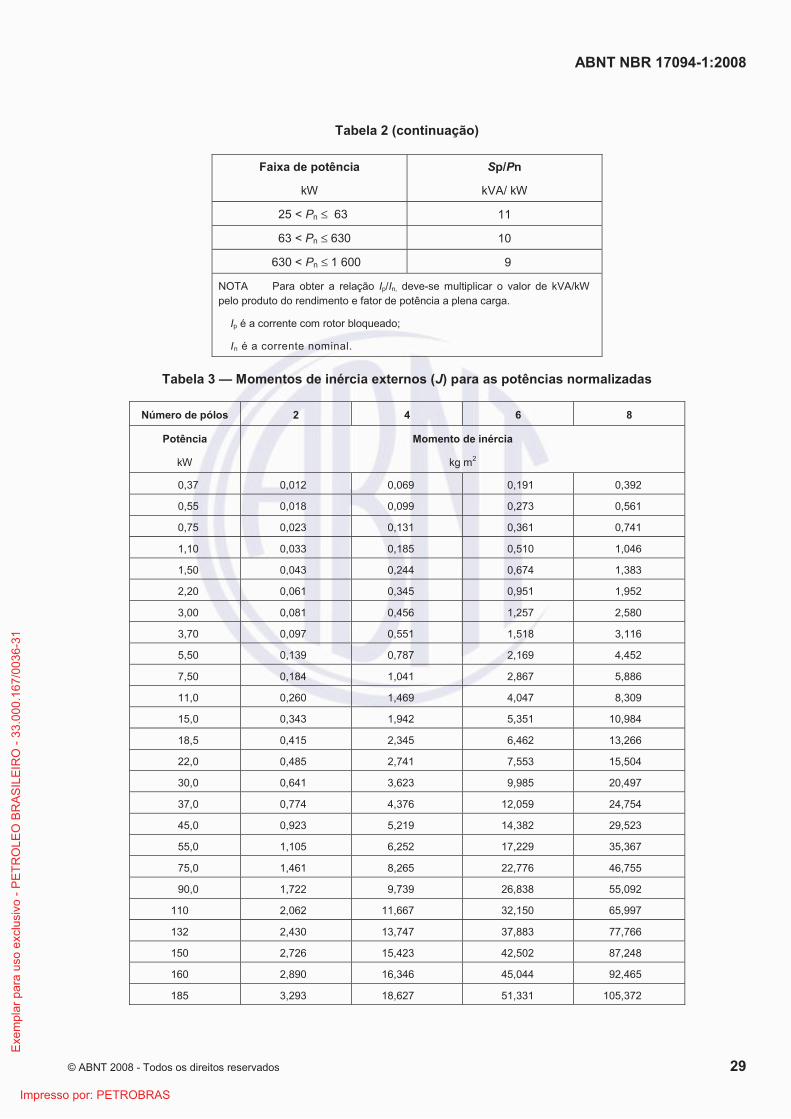
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 29
Tabela 2 (continuação)
Faixa de potência
kW
Sp/Pn
kVA/ kW
25 < Pn 63 11
63 < Pn 630 10
630 < Pn 1 600 9
NOTA Para obter a relação Ip/In, deve-se multiplicar o valor de kVA/kW pelo produto do rendimento e fator de potência a plena carga.
Ip é a corrente com rotor bloqueado;
In é a corrente nominal.
Tabela 3 — Momentos de inércia externos (J) para as potências normalizadas
Número de pólos 2 4 6 8
Potência
kW
Momento de inércia
kg m2
0,37 0,012 0,069 0,191 0,392
0,55 0,018 0,099 0,273 0,561
0,75 0,023 0,131 0,361 0,741
1,10 0,033 0,185 0,510 1,046
1,50 0,043 0,244 0,674 1,383
2,20 0,061 0,345 0,951 1,952
3,00 0,081 0,456 1,257 2,580
3,70 0,097 0,551 1,518 3,116
5,50 0,139 0,787 2,169 4,452
7,50 0,184 1,041 2,867 5,886
11,0 0,260 1,469 4,047 8,309
15,0 0,343 1,942 5,351 10,984
18,5 0,415 2,345 6,462 13,266
22,0 0,485 2,741 7,553 15,504
30,0 0,641 3,623 9,985 20,497
37,0 0,774 4,376 12,059 24,754
45,0 0,923 5,219 14,382 29,523
55,0 1,105 6,252 17,229 35,367
75,0 1,461 8,265 22,776 46,755
90,0 1,722 9,739 26,838 55,092
110 2,062 11,667 32,150 65,997
132 2,430 13,747 37,883 77,766
150 2,726 15,423 42,502 87,248
160 2,890 16,346 45,044 92,465
185 3,293 18,627 51,331 105,372
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
30 © ABNT 2008 - Todos os direitos reservados
Tabela 3 (continuação)
Número de pólos 2 4 6 8
Potência
kW
Momento de inércia
kg m2
200 3,532 19,981 55,062 113,031
220 3,849 21,771 59,994 123,155
250 4,318 24,425 67,309 138,171
260 4,473 25,303 69,727 143,135
280 4,781 27,048 74,536 153,008
300 5,088 28,781 79,311 162,810
315 5,316 30,073 82,871 170,118
330 5,543 31,359 86,415 177,392
355 5,920 33,489 92,285 189,442
370 6,145 34,760 95,787 196,631
400 6,591 37,286 102,749 210,924
425 6,961 39,377 108,511 222,752
450 7,328 41,456 114,239 234,511
475 7,694 43,523 119,936 246,204
500 8,057 45,579 125,602 257,836
530 8,491 48,034 132,365 271,719
560 8,923 50,474 139,089 285,523
600 9,494 53,707 148,000 303,814
630 9,920 56,118 154,643 317,452
710 11,047 62,493 172,209 353,512
NOTA 1 Os valores de inércia são dados em termos de mr2, em que m é a massa e r é o raio médio de
giração.
NOTA 2 O momento de inércia é definido na ISO 31/3 1992, número 3-7.
NOTA 3 Para valores de potência intermediários e maiores, o momento de inércia externo deve ser calculado pela seguinte equação, com a qual os valores da Tabela 3 foram obtidos:
J = 0,03 Pn0,9p
2,5
onde:
J é o momento de inércia externo expresso em quilograma-metro quadrado;
Pn é a potência de saída nominal, expressa em quilowatt;
p é o número de pares de pólos.
8.2.2 Motores de categoria NY
8.2.2.1 Esta categoria inclui os motores semelhantes aos de categoria N, porém previstos para partida estrela-triângulo. Para estes motores na ligação estrela, os valores mínimos do conjugado com rotor bloqueado e do conjugado mínimo de partida são iguais a 25 % dos valores indicados para os motores de categoria N (ver Tabelas 1 ou 5).
8.2.2.2 Os requisitos de partida são os mesmos especificados para os motores de categoria N. Adicionalmente, entretanto, é necessário que o conjugado resistente seja reduzido, pois o conjugado de partida em “estrela” pode ser insuficiente para acelerar algumas cargas a uma velocidade aceitável.
NOTA Recomenda-se que o número de partidas seja reduzido ao mínimo, visto que afeta a vida útil do motor.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 31
8.2.3 Motores de categoria H
Esta categoria inclui os motores com conjugado de partida elevado, previstos para partida direta, com 4, 6 ou 8 pólos, e de 0,37 kW a 160 kW na freqüência de 60 Hz.
NOTA Para motores de potência superior a 160 kW, as características de partida podem ser objeto de acordo entre fabricante e comprador.
8.2.3.1 Conjugado de partida
O conjugado de partida, representado pelo conjugado com rotor bloqueado (Cp), pelo conjugado mínimo de partida (Cmín) e pelo conjugado máximo (Cmáx), cada um expresso pela razão para o conjugado nominal (Cn), deve ter seus valores mínimos à tensão nominal, conforme a Tabela 4. Valores superiores são permitidos.
8.2.3.2 Potência aparente com rotor bloqueado
A potência aparente com rotor bloqueado (Sp) é a potência aparente de entrada expressa pela razão para a potência de saída nominal (Pn). Este valor não deve ser superior ao valor correspondente indicado na Tabela 2. Os valores desta Tabela são independentes do número de pólos e são valores máximos à tensão nominal.
8.2.3.3 Requisitos de partida
Os motores devem ser capazes de suportar duas partidas consecutivas a frio (com retorno ao repouso entre partidas), e uma partida a quente após ter funcionado nas condições nominais. O conjugado resistente devido à carga acionada é considerado constante e igual ao conjugado nominal, independentemente da velocidade, para um momento de inércia externo de 50 % do valor dado na Tabela 3.
Em cada caso, uma partida adicional é permitida somente se a temperatura do motor antes da partida não exceder a temperatura de equilíbrio térmico sob carga nominal.
NOTA O número de partidas pode ser reduzido ao mínimo, visto que afeta a vida útil do motor.
8.2.4 Motores de categoria HY
8.2.4.1 Esta categoria inclui os motores semelhantes aos de categoria H, porém previstos para partida estrela-triângulo. Para estes motores na ligação estrela, os valores mínimos do conjugado com rotor bloqueado e do conjugado mínimo de partida são iguais a 25 % dos valores indicados para os motores de categoria H (ver Tabela 4).
8.2.4.2 Os requisitos de partida são os mesmos especificados para os motores de categoria H. Adicionalmente, entretanto, é necessário que o conjugado resistente seja reduzido, pois o conjugado de partida em “estrela” pode ser insuficiente para acelerar algumas cargas a uma velocidade aceitável.
NOTA O número de partidas pode ser reduzido ao mínimo, visto que afeta a vida útil do motor.
8.2.5 Motores de categoria D
Esta categoria inclui motores com conjugado de rotor bloqueado elevado e escorregamento elevado, previstos para partida direta, com quatro ou mais pólos, de 0,37 kW a 110 kW.
8.2.5.1 Conjugado de partida
O conjugado com rotor bloqueado (Cp) expresso pela razão para o conjugado nominal (Cn) deve ter o valor mínimo, à tensão nominal, de 2,75.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
32 © ABNT 2008 - Todos os direitos reservados
O conjugado mínimo de partida e o conjugado máximo não são fornecidos porque nestes motores o conjugado diminui continuamente quando a velocidade aumenta.
O escorregamento na potência nominal deve ser igual ou superior a 5 %. São fornecidas três variações diferentes de motores quanto ao valor do escorregamento: uma com 5 % a 8 %, outra acima de 8 % a 13 % para utilização em prensas de perfuração, tesouras e outras máquinas de inércia elevada, onde é desejado utilizar a energia armazenada em um volante sob flutuações severas de carga e para diminuir o elevado pico de demanda do sistema, e a terceira incluindo motores com escorregamento acima de 13 %, para aplicações geralmente em regimes de tempo limitado, devido às perdas elevadas no rotor, como, por exemplo, pontes rolantes, guinchos, elevadores etc.
8.2.5.2 Potência aparente com rotor bloqueado
A potência aparente com rotor bloqueado (Sp) é a potência aparente de entrada expressa pela razão para a potência de saída nominal (Pn). Este valor não deve ser superior ao valor correspondente indicado na Tabela 2. Os valores desta Tabela são independentes do número de pólos e são valores máximos à tensão nominal.
8.2.5.3 Requisitos de partida
Os motores devem ser capazes de suportar duas partidas consecutivas a frio (com retorno ao repouso entre partidas), e uma partida a quente após ter funcionado nas condições nominais.
Em cada caso, uma partida adicional é permitida somente se a temperatura do motor antes da partida não exceder a temperatura de equilíbrio térmico sob carga nominal.
NOTA O número de partidas pode ser reduzido ao mínimo, visto que afeta a vida útil do motor.
Tabela 4 — Valores mínimos do conjugado com rotor bloqueado (Cp), do conjugado mínimo de partida (Cmín) e do conjugado máximo (Cmáx) para motores de categoria H, expressos pela razão para o conjugado
nominal (Cn)
Faixa de potência
kW
Número de pólos
4 6 8
Cp/Cn Cmín/Cn Cmax/Cn Cp/Cn Cmín/Cn Cmax/Cn Cp/Cn Cmín/Cn Cmax/Cn
0,37 Pn 0,63 3,0 2,1 2,1 2,55 1,8 1,9 2,25 1,65 1,9
0,63 < Pn 1,0 2,85 1,95 2,0 2,55 1,8 1,9 2,25 1,65 1,9
1,0 < Pn 1,6 2,85 1,95 2,0 2,4 1,65 1,9 2,1 1,5 1,9
1,6 < Pn 2,5 2,7 1,8 2,0 2,4 1,65 1,9 2,1 1,5 1,9
2,5 < Pn 4,0 2,55 1,8 2,0 2,25 1,65 1,9 2,0 1,5 1,9
4,0 < Pn 6,3 2,4 1,65 2,0 2,25 1,65 1,9 2,0 1,5 1,9
6,3 < Pn 10 2,4 1,65 2,0 2,25 1,65 1,9 2,0 1,5 1,9
10 < Pn 16 2,25 1,65 2,0 2,1 1,5 1,9 2,0 1,4 1,9
16 < Pn 25 2,1 1,5 1,9 2,1 1,5 1,9 2,0 1,4 1,9
25 < Pn 40 2,0 1,5 1,9 2,0 1,5 1,9 2,0 1,4 1,9
40 < Pn 160 2,0 1,4 1,9 2,0 1,4 1,9 2,0 1,4 1,9
NOTA 1 Os valores de Cp/Cn são iguais a 1,5 vez os valores correspondentes da categoria N, não sendo, porém, inferiores a 2,0.
NOTA 2 Os valores Cmín/Cn são iguais a 1,5 vez os valores correspondentes da categoria N, não sendo, porém, inferiores a 1,4.
NOTA 3 Os valores de Cmax/Cn são iguais aos valores correspondentes da categoria N, não sendo, porém, inferiores a 1,9 ou ao valor correspondente de Cmín/Cn.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 33
Tabela 5 — Valores mínimos do conjugado com rotor bloqueado (Cp), do conjugado mínimode partida (Cmín) e do conjugado máximo (Cmáx) para motores de categoria N-e, tipo de proteção
“e – Segurança aumentada”, expressos pela razão para o conjugado nominal (Cn)
Faixa de potência
kW
Número de pólos
2 4 6 8
Cp/Cn Cmín/Cn Cmax/Cn Cp/Cn Cmín/Cn Cmax/Cn Cp/Cn Cmín/Cn Cmax/Cn Cp/Cn Cmín/Cn Cmax/Cn
0,37 Pn 0,63 1,7 1,1 1,8 1,8 1,2 1,8 1,5 1,1 1,6 1,4 1,0 1,6
0,63 < Pn 1,0 1,6 1,1 1,8 1,7 1,2 1,8 1,5 1,1 1,6 1,4 1,0 1,6
1,0 < Pn 1,6 1,6 1,1 1,8 1,7 1,2 1,8 1,4 1,0 1,7 1,3 1,0 1,6
1,6 < Pn 2,5 1,5 1,0 1,8 1,6 1,1 1,8 1,4 1,0 1,7 1,3 1,0 1,6
2,5 < Pn 4,0 1,4 1,0 1,8 1,5 1,1 1,8 1,4 1,0 1,7 1,2 0,9 1,6
4,0 < Pn 6,3 1,4 1,0 1,8 1,4 1,0 1,8 1,4 1,0 1,7 1,2 0,9 1,6
6,3 < Pn 10 1,4 1,0 1,8 1,4 1,0 1,8 1,4 1,0 1,6 1,2 0,9 1,6
10 < Pn 16 1,3 0,9 1,8 1,4 1,0 1,8 1,3 1,0 1,6 1,1 0,8 1,6
16 < Pn 25 1,2 0,9 1,7 1,3 1,0 1,7 1,3 1,0 1,6 1,1 0,8 1,6
25 < Pn 40 1,1 0,8 1,7 1,2 0,9 1,7 1,2 0,9 1,6 1,1 0,8 1,6
40 < Pn 63 1,0 0,7 1,6 1,1 0,8 1,6 1,1 0,8 1,6 1,0 0,7 1,6
63 < Pn 100 0,9 0,65 1,6 1,0 0,8 1,6 1,0 0,8 1,6 0,9 0,7 1,6
100 < Pn 160 0,8 0,6 1,6 0,9 0,7 1,6 0,9 0,7 1,6 0,8 0,6 1,6
160 < Pn 250 0,75 0,55 1,6 0,8 0,6 1,6 0,8 0,6 1,6 0,8 0,6 1,6
250 < Pn 400 0,7 0,55 1,6 0,7 0,55 1,6 0,7 0,55 1,6 0,7 0,55 1,6
400 < Pn 630 0,6 0,45 1,6 0,6 0,45 1,6 0,6 0,4 1,6 0,6 0,4 1,6
Tabela 6 — Valores máximos de potência aparente comrotor bloqueado (Sp) para motores com tipo de proteção ‘e’,expressos pela razão para a potência de saída nominal (Pn)
Faixa de potência
kW
Sp / Pn
kVA/kW
0,4 Pn 6,3 12
6,3 < Pn 63 11
63 < Pn 630 10
NOTA Para obter a relação Ip/In deve-se multiplicar o valor de kVA/ kW pelo produto do rendimento e fator de potência a plena carga.
Onde:
Ip é a corrente com rotor bloqueado;
In é a corrente nominal.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
34 © ABNT 2008 - Todos os direitos reservados
Tabela 7 — Momentos de inércia externos (J) para motores com tipo de proteção ‘e’
Número de pólos 2 4 6 8
Potência
kW
Momento de inércia
kg m2
0,37 0,013 0,073 0,200 0,411
0,55 0,017 0,094 0,259 0,532
0,75 0,021 0,121 0,333 0,684
1,10 0,029 0,165 0,455 0,933
1,50 0,037 0,212 0,585 1,200
2,20 0,051 0,289 0,797 1,636
3,00 0,066 0,372 1,025 2,104
3,70 0,078 0,441 1,215 2,493
5,50 0,107 0,608 1,674 3,437
7,50 0,138 0,781 2,153 4,419
11,0 0,188 1,065 2,936 6,026
15,0 0,242 1,370 3,774 7,747
18,5 0,287 1,623 4,473 9,182
22,0 0,330 1,868 5,147 10,565
30,0 0,424 2,401 6,617 13,583
37,0 0,503 2,846 7,842 16,097
45,0 0,589 3,335 9,189 18,863
55,0 0,694 3,923 10,811 22,193
75,0 0,892 5,044 13,898 28,531
90,0 1,033 5,846 16,110 33,071
110 1,216 6,878 18,954 38,908
132 1,409 7,973 21,970 45,100
150 1,563 8,842 24,367 50,020
160 1,647 9,317 25,675 52,705
185 1,853 10,480 28,879 59,282
200 1,973 11,163 30,761 63,146
220 2,132 12,059 33,230 68,214
250 2,364 13,374 36,855 75,656
260 2,441 13,806 38,045 78,098
280 2,592 14,660 40,398 82,930
300 2,741 15,503 42,720 87,696
315 2,851 16,128 44,442 91,232
330 2,960 16,747 46,149 94,735
355 3,141 17,767 48,961 100,508
370 3,248 18,373 50,630 103,934
400 3,460 19,571 53,931 110,709
425 3,634 20,556 56,645 116,281
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 35
Tabela 7 (continuação)
Número de pólos 2 4 6 8
Potência
kW
Momento de inércia
kg m2
450 3,806 21,530 59,329 121,791
475 3,976 22,494 61,985 127,243
500 4,145 23,448 64,615 132,642
530 4,345 24,581 67,738 139,052
560 4,544 25,702 70,827 145,394
600 4,805 27,179 74,898 153,750
630 4,998 28,275 77,917 159,948
710 5,507 31,150 85,839 176,211
NOTA 1 Os valores de inércia são dados em termos de mr2, em que m é a massa e r é o raio médio de giração
NOTA 2 O momento de inércia é definido na ISO 31/3 1992, número 3-7.
NOTA 3 Para os valores de potência intermediários e maiores, o momento de inércia externo deve ser calculado pela seguinte equação, com a qual os valores da Tabela 3 foram obtidos:
J = 0,027 Pn0,81
p2,5
Onde:
J é o momento de inércia externo em quilograma-metro quadrado;
Pn é a potência de saída nominal, em quilowatt;
p é o número de pares de pólos.
9 Elevação de temperatura
9.1 Classificação térmica
Uma classificação térmica, conforme a IEC 60085, deve ser atribuída aos sistemas de isolação utilizados nos motores. A classificação deve ser designada pelo valor numérico da máxima temperatura de utilização, em graus Celsius (°C), para a qual o sistema de isolação é adequado. É permitido acrescentar ao valor numérico, entre parênteses, a designação histórica por letra.
É responsabilidade do fabricante do motor interpretar os resultados obtidos no ensaio de durabilidade térmica em função do tipo do motor e de sua aplicação, de acordo com as seções aplicáveis da IEC 60034-18.
NOTA 1 A classificação térmica de um novo sistema de isolação não deve ser considerada diretamente relacionada com a capacidade térmica dos diferentes materiais que o constituem.
NOTA 2 É aceitável continuar a utilizar as classificações existentes quando elas tiverem sido comprovadas pela experiência.
9.2 Condições durante o ensaio de elevação de temperatura
9.2.1 Temperatura do fluido refrigerante
Um motor pode ser ensaiado a qualquer temperatura conveniente do fluido refrigerante. Se a temperatura do fluido refrigerante no fim do ensaio de elevação de temperatura diferir em mais de 30 K da temperatura especificada(ou admitida conforme Tabela 13) para o funcionamento no local de instalação, as correções indicadas em 9.4.4 devem ser realizadas.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
36 © ABNT 2008 - Todos os direitos reservados
9.2.2 Medição da temperatura do fluido refrigerante
O valor a ser considerado para a temperatura do fluido refrigerante durante o ensaio de elevação de temperatura deve ser a média das leituras dos detectores de temperatura, realizadas a intervalos de tempo iguais durante a última quarta parte da duração do ensaio. A fim de reduzir erros devido ao retardo com que a temperatura de grandes motores segue as variações de temperatura do fluido refrigerante, todas as precauções adequadas devem ser tomadas para minimizar estas variações.
9.2.2.1 Motores abertos ou motores fechados sem trocadores de calor (resfriados pelo ar ou gás ambiente)
A temperatura do ar ou gás ambiente deve ser medida por meio de um ou mais detectores de temperatura colocados em pontos diferentes em torno do motor, a meia altura da carcaça, a uma distância de 1 m a 2 m do motor e protegidos de toda radiação de calor e de correntes de ar.
9.2.2.2 Motores resfriados por ar ou gás proveniente de fonte remota, através de dutos de ventilação ou motores com trocadores de calor montados separadamente
A temperatura do fluido refrigerante primário deve ser medida onde ele entra no motor.
9.2.2.3 Motores fechados com trocadores de calor montados ou incorporados ao motor
A temperatura do fluido refrigerante primário deve ser medida onde ele entra no motor. Em motores com trocadores de calor resfriados a água ou a ar, a temperatura do fluido refrigerante secundário deve ser medida onde ele entra no trocador de calor.
9.3 Determinação da elevação de temperatura dos enrolamentos e de outras partes do motor
9.3.1 Elevação de temperatura de uma parte da máquina
A elevação de temperatura de uma parte de uma máquina é a diferença entre a temperatura dessa parte da máquina, determinada por método apropriado conforme 9.3.3, e a temperatura do fluido refrigerante medida conforme 9.2.2.
9.3.2 Métodos de determinação da temperatura ou da elevação de temperatura
Para a determinação das temperaturas dos enrolamentos e de outras partes dos motores, são aceitos quatro métodos:
a) método da variação da resistência;
b) método dos detectores de temperatura embutidos (DTE);
c) método termométrico;
d) método da superposição.
Estes métodos não devem ser utilizados para uma verificação recíproca.
9.3.2.1 Método da variação da resistência
A elevação de temperatura dos enrolamentos é determinada a partir do aumento da sua resistência.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 37
9.3.2.2 Método dos detectores de temperatura embutidos (DTE)
A temperatura é determinada por meio de detectores de temperatura (por exemplo: termômetros de resistência, termopares ou termistores de coeficiente de temperatura negativo) embutidos no motor durante a fabricação, em pontos geralmente inacessíveis depois do motor montado.
9.3.2.3 Método termométrico
A temperatura é determinada por meio de termômetros aplicados às superfícies acessíveis do motor montado. O termo “termômetro” também inclui termômetros de resistência e termopares não embutidos ao motor, desde que sejam aplicados em pontos acessíveis aos termômetros de bulbo usuais. Quando os termômetros de bulbo são utilizados em pontos onde existe um campo magnético intenso, variável ou móvel, devem ser utilizados preferencialmente termômetros a álcool em vez de termômetros de mercúrio.
9.3.2.4 Método da superposição
A elevação de temperatura dos enrolamentos de c.a. é determinada por medidas de resistência, conforme 9.3.4, realizadas sem interrupção da corrente alternada de carga, e superpondo a esta uma corrente contínua de medição, de fraca intensidade. A medição da resistência deve ser executada de acordo com as recomendações contidas na IEC 60279.
9.3.3 Escolha do método de determinação da temperatura dos enrolamentos
9.3.3.1 Em geral, para determinação da temperatura dos enrolamentos de um motor, deve ser utilizado o método da variação da resistência conforme 9.3.2.1 (ver também 9.3.8.2).
9.3.3.2 Para os enrolamentos do estator de motores de potência nominal igual ou superior a 5 000 kW deve ser utilizado o método dos detectores de temperatura embutidos (DTE).
9.3.3.3 Para motores de potência nominal inferior a 5 000 kW e superior a 200 kW, o fabricante deve utilizar o método da variação da resistência ou o método dos detectores de temperatura embutidos, salvo acordo em contrário.
9.3.3.4 Para motores de potência nominal igual ou inferior a 200 kW, o fabricante deve utilizar o método da variação da resistência ou o método da superposição, salvo acordo em contrário.
9.3.3.5 Para motores de potência nominal igual ou inferior a 600 W, quando os enrolamentos não são uniformes ou quando a execução das conexões necessárias implica severas complicações, a temperatura pode ser determinada por meio de termômetros (ou termopares não embutidos). Os limites de elevação de temperatura para o método da variação da resistência mostrados na Tabela 10 devem ser aplicados.
9.3.3.6 Para os enrolamentos do estator com somente um lado de bobina por ranhura, o método dos detectores de temperatura embutidos deve ser evitado (ver 9.3.5.2), devendo ser utilizado o método da variação da resistência.
NOTA Para verificar a temperatura de tais enrolamentos em serviço, um detector embutido no fundo da ranhura é de pouco valor, visto que ele indica principalmente a temperatura do núcleo. Um detector colocado entre a bobina e a cunha acompanha muito mais fielmente a temperatura do enrolamento e é, por isto, mais adequado para fins de controle, embora ali a temperatura possa ser relativamente baixa. A relação entre a temperatura medida neste local e a temperatura medida pelo método da variação da resistência pode ser determinada por um ensaio de elevação de temperatura.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
38 © ABNT 2008 - Todos os direitos reservados
9.3.4 Determinação da elevação de temperatura dos enrolamentos pelo método da variação da resistência
9.3.4.1 Enrolamentos de cobre
A temperatura t2 pode ser obtida a partir da razão das resistências, pela equação:
1
2
1
2
5,234
5,234
R
R
t
t
Onde:
t2 é a temperatura do enrolamento no fim do ensaio,expressa em graus Celsius (º C);
t1 é a temperatura do enrolamento (motor frio com temperatura estabilizada) no momento da medição da resistência R1, expressa em graus Celsius (º C);
R2 é a resistência do enrolamento no fim do ensaio, expressa em ohms ("#$%
R1 é a resistência do enrolamento na temperatura t1, expressa em ohms("#$%
A elevação de temperatura t2 - ta é calculada pela seguinte equação:
aa tttR
RRtt 11
1
122 5,234
Onde:
ta é a temperatura do fluido refrigerante no fim do ensaio, expressa em graus Celsius (º C).
Quando a temperatura de um enrolamento for determinada pela variação da resistência, a temperatura do enrolamento antes do ensaio deve ser praticamente a temperatura do fluido refrigerante.
9.3.4.2 Enrolamentos de outros materiais
Para outros materiais que não o cobre, substituir o valor 234,5 na equação de 9.3.4.1 pelo inverso do coeficiente de temperatura da resistência do material utilizado a 0 °C. Para o alumínio, salvo especificação em contrário, deve ser utilizado 225.
9.3.5 Determinação da elevação de temperatura pelo método dos detectores de temperatura embutidos(DTE)
Quando for utilizado o método dos detectores de temperatura embutidos, estes devem estar adequadamente distribuídos entre os enrolamentos do motor. O número de detectores instalados não deve ser inferior a seis.
Os detectores devem ser localizados nos pontos presumivelmente mais quentes, de forma a ficarem eficazmente protegidos de um contato com o fluido refrigerante primário.
A leitura mais elevada dos detectores de temperatura embutidos deve ser utilizada para a determinação da temperatura do enrolamento.
NOTA Os detectores de temperatura embutidos ou suas conexões podem falhar e originar leituras incorretas; por isto, se uma ou mais destas leituras se revelarem irregulares após uma investigação, elas podem ser eliminadas.
Se houver dois ou mais lados de bobina por ranhura, os detectores devem ser instalados de acordo com 9.3.5.1.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 39
Se houver somente um lado de bobina por ranhura ou se for desejado medir a temperatura da cabeça de bobina, os métodos de instalação recomendados são os que constam em 9.3.5.2 e 9.3.5.3, mas, nestes casos, o método dos detectores de temperatura embutidos não é recomendado para a determinação da elevação de temperatura ou da temperatura total.
9.3.5.1 Dois ou mais lados de bobina por ranhura
Os detectores de temperatura devem ser localizados entre os lados de bobina isolados no interior da ranhura, nas posições presumivelmente mais quentes.
9.3.5.2 Um lado de bobina por ranhura
Os detectores embutidos nas ranhuras devem ser localizados entre a parte externa da isolação do enrolamento ea cunha ou, quando aplicável, entre a parte externa da isolação do enrolamento e o enrolamento, nas posições presumivelmente mais quentes.
9.3.5.3 Cabeças de bobina
Os detectores de temperatura devem ser localizados entre dois lados de bobinas adjacentes, no interior da camada externa das cabeças de bobina, nas posições presumivelmente mais quentes. A parte sensível à temperatura do detector de temperatura deve ficar em estreito contato com a superfície de um lado de bobina e ser adequadamente protegida contra a influência do fluido refrigerante.
9.3.6 Determinação da elevação de temperatura pelo método termométrico
9.3.6.1 O método termométrico é aceito nos casos em que não é aplicável nem o método dos detectores de temperatura embutidos, nem o método da variação da resistência.
9.3.6.2 O método termométrico é também aceito nos seguintes casos:
a) quando for impraticável a determinação da elevação de temperatura pelo método da variação da resistência, como, por exemplo, no caso de enrolamentos de baixa resistência, especialmente quando a resistência de juntas e conexões constitui uma parte considerável da resistência total;
b) enrolamentos de camada única, girantes ou fixos;
c) para a determinação da elevação de temperatura durante ensaios de rotina em motores fabricados emgrandes quantidades.
9.3.6.3 Se o comprador desejar uma leitura por termômetro, adicionalmente aos valores determinados pelo método da variação da resistência ou pelo método dos detectores de temperatura embutidos, a elevação de temperatura determinada pelo termômetro, quando colocado no ponto mais quente acessível, deve ser objeto de acordo entre fabricante e comprador, mas não deve exceder os valores informados na Tabela 10.
9.3.7 Determinação da elevação de temperatura dos enrolamentos pelo método da superposição
Para a aplicação deste método, ver IEC 61986.
9.3.8 Correção de medições realizadas após o motor atingir o repouso
9.3.8.1 A medição de temperaturas, após a parada do motor, pelo método da variação da resistência, requer que o motor pare rapidamente no fim do ensaio de elevação de temperatura. Um procedimento cuidadosamente planejado e pessoal em número adequado são necessários, a fim de se obter leituras com rapidez suficiente para proporcionar dados confiáveis. Se a leitura inicial da resistência for obtida dentro do intervalo de tempo indicado na Tabela 8, esta leitura deve ser adotada como medida de temperatura, sendo desnecessária a extrapolação das temperaturas determinadas para o instante de desligamento da energia.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
40 © ABNT 2008 - Todos os direitos reservados
Tabela 8 — Intervalo de tempo dentro do qual a leitura inicialda resistência deve ser adotada como medida da temperatura
Potência nominal (Pn)
kW
Intervalo de tempo após o desligamento da energia
s
Pn < 50 30
50 < Pn < 200 90
200 < Pn < 5 000 120
5 000 < Pn Mediante acordo
9.3.8.2 Se a leitura inicial da resistência não puder ser efetuada no intervalo de tempo prescrito na Tabela 8, ela deve ser feita tão rapidamente quanto possível, porém em um tempo não maior do que duas vezes o máximo valor especificado na Tabela 8, seguida de leituras adicionais da resistência a intervalos de aproximadamente1 min, até que estas leituras mostrem uma diminuição sensível em relação aos seus valores máximos. Uma curva destas leituras deve ser traçada em função do tempo, extrapolada até o limite superior do intervalo de tempo especificado na Tabela 8 para a potência nominal do motor. Recomenda-se um gráfico semilogarítmico, no qual a resistência é colocada na ordenada logarítmica. O valor da resistência assim obtido deve ser considerado como a resistência no momento da parada do motor. Se medições sucessivas mostrarem resistências crescentes após a parada, deve ser considerado o valor mais elevado.
Se a leitura inicial da resistência não puder ser efetuada dentro de um intervalo de tempo duas vezes o especificado na Tabela 8, este método deve ser utilizado somente mediante acordo entre fabricante e comprador.
9.3.8.3 Para motores com um lado de bobina por ranhura, o método da variação da resistência pode ser utilizado, se o motor parar dentro do intervalo de tempo especificado na Tabela 8. Se o motor levar mais de 90 s para parar após o desligamento da energia, pode ser utilizado o método da superposição (ver 9.3.2.4), se houver acordo prévio entre fabricante e comprador.
9.3.9 Duração do ensaio de elevação de temperatura para motores com características nominais do tipo contínuo máximo (regime-tipo S1)
Para estes motores, o ensaio de elevação de temperatura deve continuar até ser atingido o equilíbrio térmico(ver 3.17).
9.3.10 Ensaios de elevação de temperatura para motores com características nominais diferentes daquelas do tipo contínuo máximo
9.3.10.1 Características nominais do tipo de tempo limitado (regime tipo S2)
9.3.10.1.1 A duração do ensaio é a indicada nas características nominais.
9.3.10.1.2 No início do ensaio, a temperatura do motor não deve diferir em mais de 5 K da temperatura do fluido refrigerante.
9.3.10.1.3 No fim do ensaio, os limites de elevação de temperatura especificados em 9.4.1.2 não devem ser excedidos.
9.3.10.2 Características nominais para regimes tipo periódicos (regimes tipo S3 a S8)
Para cargas intermitentes, o ciclo de carga especificado deve ser aplicado até a obtenção de ciclos de temperatura praticamente idênticos. O critério para isto é que uma reta ligando pontos correspondentes de dois ciclos de regime tenha um gradiente inferior a 2 K/h.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 41
9.3.10.3 Características nominais para regime tipo não periódico (regime tipo S9) e características nominais com cargas constantes distintas (regime tipo S10)
O ensaio de elevação de temperatura deve ser realizado conforme 9.3.9, com as características nominais do tipo contínuo equivalente atribuídas pelo fabricante, levando em conta as variações nominais de carga e velocidade e as sobrecargas possíveis, com base no regime especificado pelo comprador conforme os regimes tipo S9 e S10, definidos em 5.1.2.9 e 4.2.10, respectivamente.
9.3.11 Determinação da constante de tempo térmica equivalente de motores para regime tipo S9
A constante de tempo térmica equivalente, com ventilação do motor como em condições normais de funcionamento, adequada para a determinação aproximada da evolução da temperatura, pode ser obtida a partir da curva de resfriamento traçada de acordo com 9.3.8.2. O seu valor é 1,44 vez (isto é, 1/ln2 vez) o tempo entre o desligamento do motor e a obtenção de uma temperatura que represente um ponto na curva de resfriamento correspondente à metade da elevação de temperatura do motor.
9.3.12 Método de medição da temperatura dos mancais
9.3.12.1 Para a medição da temperatura dos mancais são aceitos o método termométrico (ver 9.3.2.3) e o método dos detectores de temperatura embutidos (ver 9.3.2.2).
9.3.12.2 O ponto de medição para determinar a temperatura dos mancais deve ficar tão próximo quanto possível de um dos dois locais especificados na Tabela 9.
Tabela 9 — Localização dos pontos de medição da temperatura dos mancais
Tipo de mancal Ponto de medição Localização do ponto de medição
Rolamento de esferas ou rolos
XNa caixa de mancal e a uma distânciaa não superior a 10 mm do anel externo do rolamento
YNa superfície externa da caixa de mancal, tão próximo quanto possível do anel externo do rolamento
Deslizamento
XNa zona de pressão do elemento estacionário do mancalb e a uma distânciaa não superior a 10 mm da película de óleo
YEm qualquer outro ponto do elemento estacionário do mancal
aA distância medida até o ponto mais próximo do detector de temperatura embutido ou do termômetro.
bO elemento estacionário do mancal é a parte que suporta a superfície de deslizamento do mancal, e que é fixa na caixa
do mancal por pressão ou de qualquer outra forma. A zona de pressão é a área da superfície de deslizamento que suporta o peso do rotor e outras cargas.
9.3.12.3 Para a medição da temperatura dos mancais, deve ser assegurada boa transferência de calor entre o detector de temperatura e a parte onde será medida a temperatura; por exemplo, qualquer interstício de ar deve ser preenchido com um produto condutor de calor.
NOTA Entre os pontos de medição X e Y, bem como entre estes pontos e o ponto mais quente do mancal, existem diferenças de temperatura que dependem, entre outras coisas, do tamanho do mancal. Para mancais de deslizamento com elementos estacionários introduzidos sob pressão e para mancais com rolamento de esferas ou de rolos de diâmetro interno igual ou inferior a 150 mm, as diferenças de temperatura que ocorrem entre os pontos de medição X e Y podem ser admitidas como desprezíveis. No caso de mancais maiores, as temperaturas que ocorrem no ponto de medição X são aproximadamente 15 K superiores àquelas que ocorrem no ponto de medição Y.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
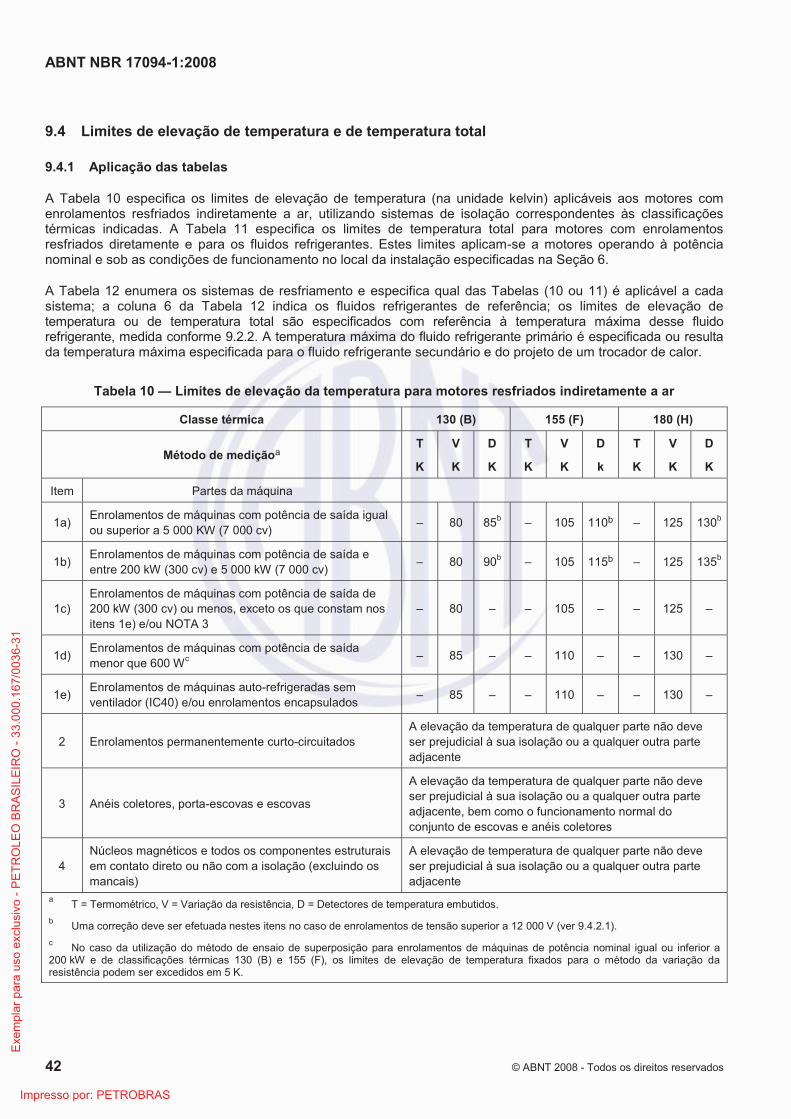
ABNT NBR 17094-1:2008
42 © ABNT 2008 - Todos os direitos reservados
9.4 Limites de elevação de temperatura e de temperatura total
9.4.1 Aplicação das tabelas
A Tabela 10 especifica os limites de elevação de temperatura (na unidade kelvin) aplicáveis aos motores com enrolamentos resfriados indiretamente a ar, utilizando sistemas de isolação correspondentes às classificações térmicas indicadas. A Tabela 11 especifica os limites de temperatura total para motores com enrolamentos resfriados diretamente e para os fluidos refrigerantes. Estes limites aplicam-se a motores operando à potência nominal e sob as condições de funcionamento no local da instalação especificadas na Seção 6.
A Tabela 12 enumera os sistemas de resfriamento e especifica qual das Tabelas (10 ou 11) é aplicável a cada sistema; a coluna 6 da Tabela 12 indica os fluidos refrigerantes de referência; os limites de elevação de temperatura ou de temperatura total são especificados com referência à temperatura máxima desse fluido refrigerante, medida conforme 9.2.2. A temperatura máxima do fluido refrigerante primário é especificada ou resulta da temperatura máxima especificada para o fluido refrigerante secundário e do projeto de um trocador de calor.
Tabela 10 — Limites de elevação da temperatura para motores resfriados indiretamente a ar
Classe térmica 130 (B) 155 (F) 180 (H)
Método de mediçãoaT
K
V
K
D
K
T
K
V
K
D
k
T
K
V
K
D
K
Item Partes da máquina
1a)Enrolamentos de máquinas com potência de saída igual ou superior a 5 000 KW (7 000 cv)
– 80 85b – 105 110b – 125 130b
1b)Enrolamentos de máquinas com potência de saída e entre 200 kW (300 cv) e 5 000 kW (7 000 cv)
– 80 90b – 105 115b – 125 135b
1c)Enrolamentos de máquinas com potência de saída de 200 kW (300 cv) ou menos, exceto os que constam nos itens 1e) e/ou NOTA 3
– 80 – – 105 – – 125 –
1d)Enrolamentos de máquinas com potência de saída menor que 600 Wc – 85 – – 110 – – 130 –
1e)Enrolamentos de máquinas auto-refrigeradas sem ventilador (IC40) e/ou enrolamentos encapsulados
– 85 – – 110 – – 130 –
2 Enrolamentos permanentemente curto-circuitadosA elevação da temperatura de qualquer parte não deve ser prejudicial à sua isolação ou a qualquer outra parteadjacente
3 Anéis coletores, porta-escovas e escovas
A elevação da temperatura de qualquer parte não deve ser prejudicial à sua isolação ou a qualquer outra parte adjacente, bem como o funcionamento normal do conjunto de escovas e anéis coletores
4Núcleos magnéticos e todos os componentes estruturais em contato direto ou não com a isolação (excluindo os mancais)
A elevação de temperatura de qualquer parte não deve ser prejudicial à sua isolação ou a qualquer outra parte adjacente
aT = Termométrico, V = Variação da resistência, D = Detectores de temperatura embutidos.
bUma correção deve ser efetuada nestes itens no caso de enrolamentos de tensão superior a 12 000 V (ver 9.4.2.1).
cNo caso da utilização do método de ensaio de superposição para enrolamentos de máquinas de potência nominal igual ou inferior a
200 kW e de classificações térmicas 130 (B) e 155 (F), os limites de elevação de temperatura fixados para o método da variação daresistência podem ser excedidos em 5 K.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
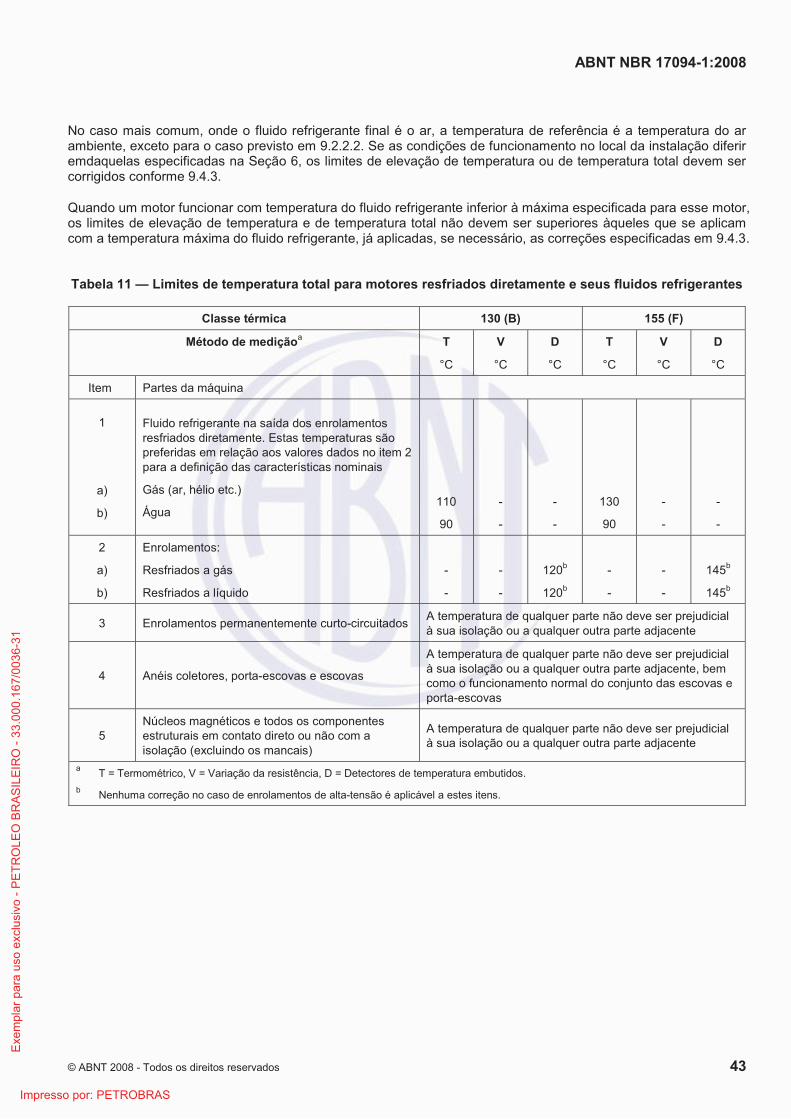
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 43
No caso mais comum, onde o fluido refrigerante final é o ar, a temperatura de referência é a temperatura do ar ambiente, exceto para o caso previsto em 9.2.2.2. Se as condições de funcionamento no local da instalação diferir emdaquelas especificadas na Seção 6, os limites de elevação de temperatura ou de temperatura total devem ser corrigidos conforme 9.4.3.
Quando um motor funcionar com temperatura do fluido refrigerante inferior à máxima especificada para esse motor, os limites de elevação de temperatura e de temperatura total não devem ser superiores àqueles que se aplicam com a temperatura máxima do fluido refrigerante, já aplicadas, se necessário, as correções especificadas em 9.4.3.
Tabela 11 — Limites de temperatura total para motores resfriados diretamente e seus fluidos refrigerantes
Classe térmica 130 (B) 155 (F)
Método de mediçãoa T
°C
V
°C
D
°C
T
°C
V
°C
D
°C
Item Partes da máquina
1
a)
b)
Fluido refrigerante na saída dos enrolamentos resfriados diretamente. Estas temperaturas são preferidas em relação aos valores dados no item 2 para a definição das características nominais
Gás (ar, hélio etc.)
Água110
90
-
-
-
-
130
90
-
-
-
-
2
a)
b)
Enrolamentos:
Resfriados a gás
Resfriados a líquido
-
-
-
-
120b
120b
-
-
-
-
145b
145b
3 Enrolamentos permanentemente curto-circuitadosA temperatura de qualquer parte não deve ser prejudicial à sua isolação ou a qualquer outra parte adjacente
4 Anéis coletores, porta-escovas e escovas
A temperatura de qualquer parte não deve ser prejudicial à sua isolação ou a qualquer outra parte adjacente, bem como o funcionamento normal do conjunto das escovas e porta-escovas
5Núcleos magnéticos e todos os componentes estruturais em contato direto ou não com a isolação (excluindo os mancais)
A temperatura de qualquer parte não deve ser prejudicial à sua isolação ou a qualquer outra parte adjacente
aT = Termométrico, V = Variação da resistência, D = Detectores de temperatura embutidos.
bNenhuma correção no caso de enrolamentos de alta-tensão é aplicável a estes itens.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
44 © ABNT 2008 - Todos os direitos reservados
Tabela 12 — Bases para a especificação de elevações de temperatura ou de temperaturas totaisem função do método de resfriamento
1 2 3 4 5 6
ItemFluido
refrigerante primário
ResfriamentoFluido
refrigerante secundário
Tabela desta
expressa em graus Celsius
(° C)
A Tabela citada na coluna 4 especifica os
limites de
Fluido refrigerante de referência
1 Ar Indireto Nenhuma 10
Elevação da temperatura
Ar ambiente2 Ar Indireto Ar 10
3 Ar Indireto Água 10Refrigerante primário na entrada do motorb
4 Ar Direto Nenhuma 11
Temperatura total
Ar ambiente5 Ar Direto Ar 11
6 Ar Direto Água 11
Gás na entrada do motor ou líquido na entrada do enrolamento
aSe 9.2.2.2 se aplica, o fluido refrigerante de referência é o que circula nos dutos para entrada no motor e não o ar ambiente ao
redor do motor.
bPara motores resfriados conforme o método especificado na em 3.31, se a elevação de temperatura for medida acima da
temperatura do fluido refrigerante secundário na entrada do trocador de calor, os limites de elevação de temperatura são os da Tabela 10, corrigidos conforme 9.4.1.3 e item 2 da Tabela 13.
9.4.1.1 Motores com enrolamentos resfriados indireta e diretamente
Para um motor com enrolamentos resfriados indireta e diretamente, o limite de elevação de temperatura ou de temperatura total de cada enrolamento deve ser conforme os requisitos da Tabela aplicável.
9.4.1.2 Motores com características nominais para regime-tipo de tempo limitado (S2)
Para um motor ao qual foram atribuídas características nominais do tipo de tempo limitado (ver 5.2.2.2) e cuja potência nominal é inferior a 5 000 kW (ou 7 000 cv), os limites de elevação de temperatura dados na Tabela 10, acrescidos de 10 K, não devem ser excedidos.
9.4.1.3 Motores com enrolamentos resfriados indiretamente e com trocadores de calor
9.4.1.3.1 Para um motor utilizando o ar ambiente como fluido refrigerante secundário, a elevação de temperatura deve ser medida acima da temperatura do ar ambiente.
9.4.1.3.2 Para um motor utilizando um trocador de calor resfriado a água, a elevação de temperatura deve ser medida acima da temperatura do fluido refrigerante primário na entrada do motor, ou acima da temperatura da água de resfriamento (fluido refrigerante secundário) na entrada do trocador de calor. O fabricante deve indicar na placa de identificação o fluido refrigerante utilizado como referência (ver 22.2 alínea i).
9.4.1.3.3 Se um terceiro fluido refrigerante for utilizado, a elevação de temperatura deve ser medida acima da temperatura do fluido refrigerante primário ou secundário, como em 9.4.1.3.2.
9.4.1.3.4 Se o fluido refrigerante de referência for o ar ambiente ou o fluido refrigerante primário, os limites de elevação de temperatura devem ser aqueles da Tabela 10 corrigidos, se necessário, conforme Tabela 13.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 45
9.4.1.3.5 Se o fluido refrigerante de referência for o fluido refrigerante secundário, os limites de elevação de temperatura devem ser aqueles da Tabela 10, corrigidos, se necessário, conforme Tabela 13.
9.4.1.4 Motores com características nominais para regime-tipo não periódico (S9)
Para um motor ao qual foram atribuídas características nominais para regime-tipo não periódico (ver 5.2.4), os limites de elevação de temperatura da Tabela 10 podem ser excedidos por períodos curtos durante o funcionamento do motor.
9.4.1.5 Motores com características nominais com cargas constantes distintas
Para um motor ao qual foram atribuídas características nominais com cargas constantes distintas baseadas no regime tipo S10, os limites de elevação de temperatura da Tabela 10 podem ser excedidos por períodos distintos de tempo durante o funcionamento do motor.
9.4.2 Correções dos limites de elevação de temperatura ou de temperatura total para os enrolamentos do estator com tensão nominal superior a 12 000 V
9.4.2.1 Enrolamentos resfriados indiretamente a ar
Quando as medições são feitas por detector de temperatura embutido (DTE), os limites de elevação de temperatura especificados na Tabela 10 devem ser reduzidos em 1 K para cada 1 000 V (ou fração) acima de 12 000 V e até 17 000 V inclusive, e adicionalmente reduzidos em 0,5 K para cada 1 000 V (ou fração) acima de 17 000 V.
9.4.2.2 Enrolamentos resfriados diretamente a gás ou líquido
Nenhuma correção deve ser feita.
NOTA O fluxo de calor passa principalmente para o fluido refrigerante no interior dos condutores e não através da isolação principal do enrolamento.
9.4.3 Correções dos limites de elevação de temperatura ou de temperatura total para levar em conta as condições de funcionamento no local da instalação diferentes das indicadas na Seção 6
Para os motores ou enrolamentos resfriados indiretamente a ar, para os quais os limites de elevação de temperatura estão especificados na Tabela 10, aplicam-se os requisitos de 9.4.3.1 e 9.4.3.2.
Para os motores ou enrolamentos resfriados diretamente por ar ou líquido, aplicam-se os requisitos da Tabela 15; os limites de temperatura total para estes motores estão especificados na Tabela 11.
NOTA Em 9.4.3.1 e 9.4.3.2, o termo “fluido refrigerante” significa o fluido refrigerante de referência apropriado ao método de resfriamento especificado na coluna 6 da Tabela 12.
9.4.3.1 Se um motor, ao qual se aplica a Tabela 10, funcionar em condições de serviço diferentes daquelas definidas em 6.2 a 6.5, os limites de elevação de temperatura à carga nominal devem ser aqueles especificados na Tabela 10, corrigidos conforme Tabela 13. Do mesmo modo, para os motores aos quais é aplicável a Tabela 11, as correções da Tabela 15 devem ser feitas.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
46 © ABNT 2008 - Todos os direitos reservados
Tabela 13 — Correções dos limites de elevação de temperatura no local de funcionamento de enrolamentos resfriados indiretamente para levar em conta as condições de funcionamento e as
características nominais que não sejam as de referência
ItemCondições de funcionamento ou características
nominaisCorreções dos limites de elevação de temperatura
( ) da Tabelas 10
1
Temperatura máxima do fluido refrigerante, especificada ou resultante na entrada da máquina ( c)
0 °C &% c &%'(%°C
Nenhum aumento deve ser efetuado
Mediante acordo entre fabricante e comprador, podem ser aumentados em um valor igual à diferença entre 40 °C e a temperatura do fluido refrigerantea, com um máximo de 30 K (ver Figura 12)
40 °C < c &%)(%*+Reduzidos de um valor igual à diferença entre a temperatura do fluido refrigerante e 40 °C (ver Figura 12).
c < 0 °C ou c > 60 °C Mediante acordo entre fabricante e comprador
2
Temperatura máxima da água na entrada dos trocadores de calor resfriados a água ou temperatura máxima daágua ambiente para máquinas submersíveis com resfriamento de superfície externa e máquinas com resfriamento por envoltória de água ( W)
5 °C &% W &%,-%*+
Aumentados em 10 K e adicionalmente, diante acordo entre fabricante e comprador, em um valor igual à diferença entre 25 °C e W
W > 25 °CAumentados em 10 K e reduzidos da diferença entre W
e 25 °C
3b Altitude (H)1 000 m < H &%'%(((%.
Nenhuma correção é aplicada por este único motivo
Deve ser admitido que a diminuição do poder de resfriamento resultante da altitude é compensada por uma redução da temperatura ambiente máxima abaixo de 40 °C, e que as temperaturas totais admissíveis não ultrapassem 40 °C mais as elevações de temperatura da Tabela 10b
H > 4 000 m Mediante acordo entre fabricante e comprador
aUm aumento menor pode ser aplicado mediante acordo entre fabricante e comprador, pois a manutenção de tensões mecânicas de
origem térmica em componentes da máquina, principalmente se ela for de grande porte, dentro dos limites admissíveis, pode obrigar aobservação de gradientes de temperatura, no projeto desses componentes, menores que os decorrentes das elevações de temperatura máximas especificadas para os enrolamentos, com conseqüente redução dessas elevações a valores tais que os gradientes térmicos resultantes sejam toleráveis.
bAdmitindo-se que a redução necessária na temperatura ambiente é de 1 % dos limites de elevação de temperatura, para cada 100 m de
altitude acima de 1 000 m, a temperatura ambiente máxima aceitável no local de funcionamento, baseada em uma temperatura ambiente máxima de 40 °C, para altitudes iguais ou inferiores a 1 000 m, deve ser a indicada na Tabela 14 (baseada nos limites de elevação de temperatura dos itens 1-b) e 1-c) da Tabela 10).
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
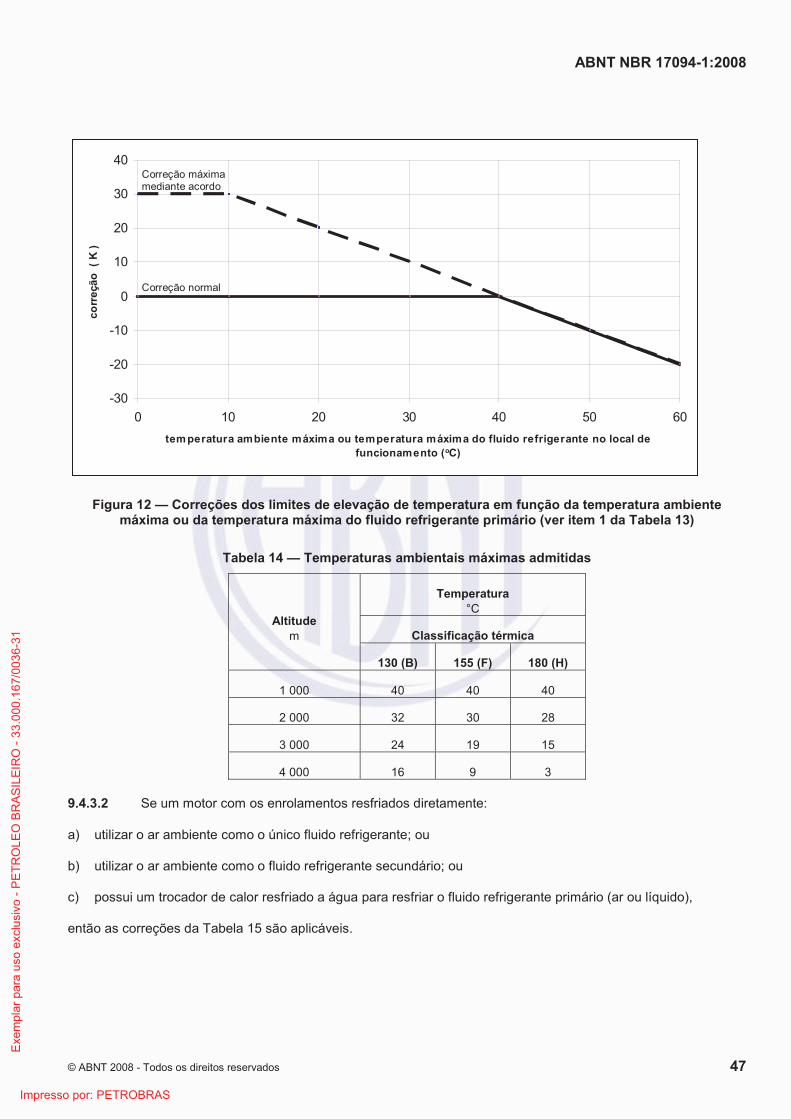
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 47
-30
-20
-10
0
10
20
30
40
0 10 20 30 40 50 60
tem peratura ambiente máxima ou temperatura máxima do fluido refrigerante no local de funcionamento (oC)
corr
eção
( K
)
Correção máxima mediante acordo
Correção normal
Figura 12 — Correções dos limites de elevação de temperatura em função da temperatura ambiente máxima ou da temperatura máxima do fluido refrigerante primário (ver item 1 da Tabela 13)
Tabela 14 — Temperaturas ambientais máximas admitidas
Altitudem
Temperatura°C
Classificação térmica
130 (B) 155 (F) 180 (H)
1 000 40 40 40
2 000 32 30 28
3 000 24 19 15
4 000 16 9 3
9.4.3.2 Se um motor com os enrolamentos resfriados diretamente:
a) utilizar o ar ambiente como o único fluido refrigerante; ou
b) utilizar o ar ambiente como o fluido refrigerante secundário; ou
c) possui um trocador de calor resfriado a água para resfriar o fluido refrigerante primário (ar ou líquido),
então as correções da Tabela 15 são aplicáveis.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
48 © ABNT 2008 - Todos os direitos reservados
Tabela 15 — Correções dos limites de temperatura no local de funcionamento para os enrolamentos resfriados diretamente a ar para levar em conta as condições de funcionamento e as características
nominais que não sejam as de referência
ItemCondições de funcionamento ou características
nominaisCorreções dos limites de temperatura da
Tabela 11
1Temperatura do fluido refrigerante de referência ( c)
0 °C &% c &%'(%°C
Reduzidos da diferença entre 40 °C e c
Entretanto, mediante acordo entre fabricante e comprador, uma redução menor pode ser aplicada, desde que para C 10 °C a redução seja feita no mínimo igual à diferença entre 10 °C e c
a
40 °C < c &%)(%°C Nenhuma correção
c < 0 oC ou c > 60 °C Mediante acordo entre fabricante e comprador
2Tensão nominal do enrolamento de armadura (UN)
UN > 12 kV
Nenhuma correção. O fluxo de calor passa principalmente para o fluido refrigerante no interior dos condutores e não através da isolação principal do enrolamento
aNenhuma dessas correções deve ser feita no limite de temperatura total especificado na Tabela 11 para um fluido refrigerante
primário líquido, uma vez que este limite é estabelecido por outros fatores, em um nível inferior àquele correspondente à classificação térmica da isolação.
9.4.4 Correções dos limites de elevação de temperatura ou de temperatura total para levar em conta as condições de ensaio
Nesta subseção:
Sé o limite de elevação de temperatura aplicável ao local de funcionamento;
T é o limite de elevação de temperatura aplicável ao local de ensaio;
Sé o limite de temperatura total aplicável ao local de funcionamento;
Té o limite de temperatura total aplicável ao local de ensaio;
cSé a temperatura máxima do fluido refrigerante (ver NOTAS) no local de funcionamento;
cTé a temperatura máxima do fluido refrigerante (ver NOTAS) no fim do ensaio de elevação de temperatura;
HS
é a altitude do local de funcionamento;
HT
é a altitude do local de ensaio;
A, B, D, E são as correções de temperatura, expressa em Kelvins (K), que podem ser positivas ou negativas.
As temperaturas são especificadas em graus Celsius (°C); as elevações de temperatura e as correções de temperatura, em Kelvin (K); e as altitudes, em metros (m).
NOTA 1 Para um motor resfriado a ar com um trocador de calor resfriado à água, o fluido refrigerante é o fluido refrigerante primário na entrada do motor. Para outros motores resfriados a ar, é o ar ambiente.
NOTA 2 Se a elevação de temperatura for medida acima da temperatura da água na entrada do trocador, leva-se em conta o efeito da altitude sobre a diferença de temperatura entre o ar e a água. Entretanto, para a maioria dos projetos de trocador de calor, o efeito será pequeno, a diferença aumentando com a altitude à taxa de aproximadamente 2 K por 1 000 m. Se uma correção for necessária, ela é objeto de acordo entre fabricante e comprador.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 49
9.4.4.1 Para motores com enrolamentos resfriados indiretamente a ar
Os limites de elevação de temperatura aplicáveis no local de funcionamento (determinados na Tabela 10 e com as correções apropriadas de 9.4.3) devem, quando necessário, ser corrigidos conforme 9.4.4.1.1 e 9.4.4.1.2, paradeterminar os limites aplicáveis nas condições de ensaio.
9.4.4.1.1 Correção para a diferença de altitude
Esta correção se aplica quando ambos os locais, de funcionamento e de ensaio, estão em altitude não superior a 4 000 m; se pelo menos um dos locais estiver em uma altitude superior a 4 000 m, uma correção deve ser aplicada mediante acordo entre fabricante e comprador. Para cada parte do motor, uma correção “A” deve ser calculada conforme a equação:
SST410 HHA
Os valores de HT ou HS inferiores a 1 000 m devem ser considerados iguais a 1 000 m, isto é, nenhuma correção é aplicável se ambos os locais estiverem em uma altitude inferior a 1 000 m. Se somente um local estiver em uma altitude superior a 1 000 m, a correção é proporcional ao excesso acima de 1 000 m e não à diferença entre as duas altitudes.
Então:
AST
NOTA “A” é negativo se o local de funcionamento for mais elevado que o local de ensaio.
9.4.4.1.2 Correção para a diferença de temperatura do fluido refrigerante
Nenhuma correção deve ser aplicada, se ao fim do ensaio de elevação de temperatura o valor numérico de ( cT - cS) for inferior ou igual a 30 K. Se o valor numérico de ( cT - cS) for superior a 30 K, uma correção B deve ser objeto de acordo entre fabricante e comprador.
Então:
BST
9.4.4.2 Para motores com enrolamentos resfriados diretamente a ar
9.4.4.2.1 Correção para a diferença de altitude
Esta correção se aplica quando ambos os locais, de funcionamento e de ensaio, estão em altitude não superior a 4 000 m; se pelo menos um dos locais estiver em uma altitude superior a 4 000 m, uma correção deve ser aplicada mediante acordo entre fabricante e comprador. Uma correção “D” deve ser calculada conforme a equação:
4T S S cS10D H H
Ao calcular D, os valores de HT ou HS inferiores a 1 000 m devem ser considerados iguais a 1 000 m (ver 9.4.4.1.1).
Então:
DcScTST
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
50 © ABNT 2008 - Todos os direitos reservados
9.4.4.2.2 Correção para a diferença de temperatura do fluido refrigerante
Nenhuma correção deve ser aplicada, se ao fim do ensaio de elevação de temperatura o valor numérico de ( cT - cS) for inferior ou igual a 30 K. Se o valor numérico de ( cT - cS) for superior a 30 K, uma correção “E” deve ser objeto de acordo entre fabricante e comprador.
Então:
EST
10 Fator de serviço
10.1 Os motores de indução abrangidos por esta parte da ABNT NBR 17094, quando funcionando à tensão e freqüência nominais e com a elevação de temperatura de acordo com a Tabela 10, possuem fator de serviço unitário.
10.2 Em aplicações onde são exigidas uma capacidade de sobrecarga, recomenda-se a utilização de um motor de potência nominal superior à normalizada, para evitar que a elevação da temperatura para a classificação térmica utilizada seja excedida e para fornecer o conjugado adequado.
10.3 No caso de motores monofásicos e polifásicos, abertos ou totalmente fechados com ventilação externa, de potência nominal igual ou inferior a 150 kW (200 cv), com classificação térmica 130(B) ou 155(F), o comprador pode optar pela escolha de um motor com fator de serviço. Fator de serviço é um multiplicador que, quando aplicado à potência nominal do motor, indica a carga que pode ser acionada continuamente sob tensão e freqüência nominais e com limite de elevação de temperatura do enrolamento, determinado pelo método da variação de resistência, 10 K acima do limite indicado na Tabela 10. Os valores de rendimento, fator de potência e velocidade podem diferir dos valores nominais, porém o conjugado e a corrente com rotor bloqueado e o conjugado máximo permanecem inalterados. A utilização do fator de serviço implica uma vida útil inferior àquela do motor com carga nominal.
10.4 O fator de serviço, quando especificado, deve ter o valor conforme indicado na Tabela 16.
Tabela 16 — Fatores de serviço
Potência nominal Fator de serviço
kW cv
Velocidade síncrona
rpm
3 600 1 800 1 200 900
0,037 1/20 1,4 1,4 1,4 1,4
0,06 1/12 1,4 1,4 1,4 1,4
0,09 1/8 1,4 1,4 1,4 1,4
0,12 1/6 1,35 1,35 1,35 1,35
0,18 1/4 1,35 1,35 1,35 1,35
0,25 1/3 1,35 1,35 1,35 1,35
0,37 1/2 1,25 1,25 1,25 1,15a
0,55 3/4 1,25 1,25 1,15a 1,15a
0,75 1,0 1,25 1,15a 1,15a 1,15a
1,1 a 150 1,5 a 200 1,15a 1,15a 1,15a 1,15a
a No caso de motores de gaiola, estes fatores de serviço se aplicam somente às categorias N e H.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 51
11 Ensaio dielétrico
11.1 Generalidades
O ensaio dielétrico deve ser realizado nas instalações do fabricante. Se for solicitado um ensaio de elevação de temperatura e/ou de sobrevelocidade, o ensaio dielétrico deve ser realizado imediatamente após tais ensaios.A tensão de ensaio deve ser alternada, de freqüência industrial com forma de onda praticamente senoidal.
11.2 Ensaio dielétrico em motores novos
11.2.1 A tensão de ensaio especificada na Tabela 17 deve ser aplicada entre os enrolamentos submetidos aensaio e a carcaça do motor aterrada. O núcleo magnético e os enrolamentos não submetidos a ensaio também devem ser aterrados. Esta tensão deve ser aplicada somente a um motor novo e completo, com todas as suas partes no lugar, em condições equivalentes às condições normais de funcionamento. Todos os acessórios, tais como transformadores de corrente, pára-raios contra surtos etc., com os lides ligados aos terminais do motor, devem ser desconectados durante o ensaio.
Tabela 17 — Tensões para o ensaio dielétrico
Item Máquina ou parte da máquina Tensão de ensaio (valor eficaz)
1 Enrolamentos isolados:
a) de potência nominal inferior a 1 kW (1,4 cv) e de tensão nominal inferior a 100 V
b) de potência nominal inferior a 10 000 kW (1 400 cv), exceto aqueles do item 1a)b
c) de potência nominal igual ou superior a 10 000 kW (1 400 cv)b, e tensão nominala:
inferior ou igual a 24 000 V
superior a 24 000 V
500 V + 2 vezes a tensão nominal
1 000 V + 2 vezes a tensão nominal, com um mínimo de 1 500 Va
1 000 V + 2 vezes a tensão nominal
Mediante acordo
2 Enrolamentos secundários (usualmente do rotor)de motores de indução, não permanentementecurto-circuitados (destinados para partida com reostato):
a) no caso de motores reversíveis ou motoresreversíveis somente quando parados
b) no caso de motores reversíveis pela inversão da alimentação primária quando em funcionamento
1 000 V + 2 vezes a tensão em circuito aberto com o rotor parado, medida entre os anéis coletores ou entre os terminais secundários, com a tensão nominal aplicada ao enrolamento primário
1 000 V + 4 vezes a tensão em circuito aberto com o rotor parado, como definida em 2 a)
3 Grupo de máquinas e equipamentos novos, instalados e ligados em conjunto
A repetição dos ensaios dos itens 1 e 2 deve ser evitada, se possível, mas se um ensaio for realizado num grupo de máquinas e equipamentos, em que cada um deles tenha sido submetido previamente a um ensaio dielétrico, a tensão de ensaio a ser aplicada a tal grupo ligado eletricamente deve ser 80 % da tensão mais baixa aplicável a um elemento individual do grupoc
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
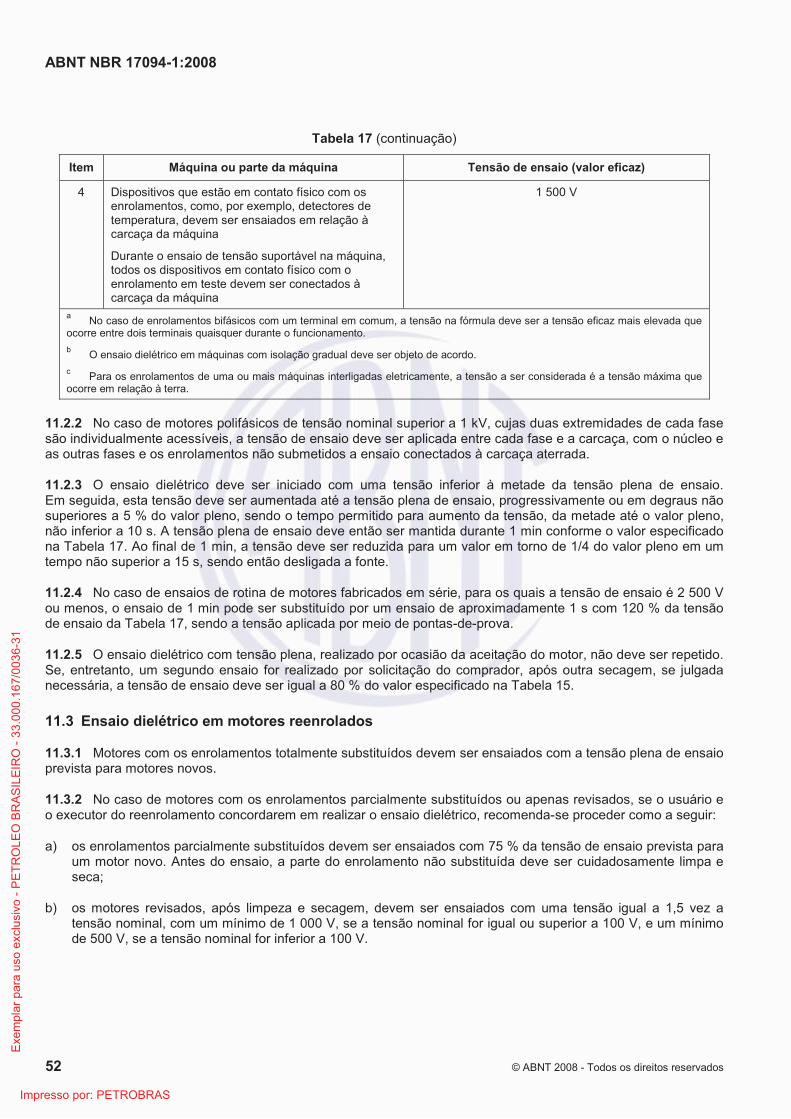
ABNT NBR 17094-1:2008
52 © ABNT 2008 - Todos os direitos reservados
Tabela 17 (continuação)
Item Máquina ou parte da máquina Tensão de ensaio (valor eficaz)
4 Dispositivos que estão em contato físico com os enrolamentos, como, por exemplo, detectores de temperatura, devem ser ensaiados em relação à carcaça da máquina
Durante o ensaio de tensão suportável na máquina, todos os dispositivos em contato físico com o enrolamento em teste devem ser conectados à carcaça da máquina
1 500 V
aNo caso de enrolamentos bifásicos com um terminal em comum, a tensão na fórmula deve ser a tensão eficaz mais elevada que
ocorre entre dois terminais quaisquer durante o funcionamento.
bO ensaio dielétrico em máquinas com isolação gradual deve ser objeto de acordo.
cPara os enrolamentos de uma ou mais máquinas interligadas eletricamente, a tensão a ser considerada é a tensão máxima que
ocorre em relação à terra.
11.2.2 No caso de motores polifásicos de tensão nominal superior a 1 kV, cujas duas extremidades de cada fase são individualmente acessíveis, a tensão de ensaio deve ser aplicada entre cada fase e a carcaça, com o núcleo e as outras fases e os enrolamentos não submetidos a ensaio conectados à carcaça aterrada.
11.2.3 O ensaio dielétrico deve ser iniciado com uma tensão inferior à metade da tensão plena de ensaio.Em seguida, esta tensão deve ser aumentada até a tensão plena de ensaio, progressivamente ou em degraus não superiores a 5 % do valor pleno, sendo o tempo permitido para aumento da tensão, da metade até o valor pleno, não inferior a 10 s. A tensão plena de ensaio deve então ser mantida durante 1 min conforme o valor especificado na Tabela 17. Ao final de 1 min, a tensão deve ser reduzida para um valor em torno de 1/4 do valor pleno em um tempo não superior a 15 s, sendo então desligada a fonte.
11.2.4 No caso de ensaios de rotina de motores fabricados em série, para os quais a tensão de ensaio é 2 500 V ou menos, o ensaio de 1 min pode ser substituído por um ensaio de aproximadamente 1 s com 120 % da tensão de ensaio da Tabela 17, sendo a tensão aplicada por meio de pontas-de-prova.
11.2.5 O ensaio dielétrico com tensão plena, realizado por ocasião da aceitação do motor, não deve ser repetido. Se, entretanto, um segundo ensaio for realizado por solicitação do comprador, após outra secagem, se julgada necessária, a tensão de ensaio deve ser igual a 80 % do valor especificado na Tabela 15.
11.3 Ensaio dielétrico em motores reenrolados
11.3.1 Motores com os enrolamentos totalmente substituídos devem ser ensaiados com a tensão plena de ensaio prevista para motores novos.
11.3.2 No caso de motores com os enrolamentos parcialmente substituídos ou apenas revisados, se o usuário e o executor do reenrolamento concordarem em realizar o ensaio dielétrico, recomenda-se proceder como a seguir:
a) os enrolamentos parcialmente substituídos devem ser ensaiados com 75 % da tensão de ensaio prevista para um motor novo. Antes do ensaio, a parte do enrolamento não substituída deve ser cuidadosamente limpa e seca;
b) os motores revisados, após limpeza e secagem, devem ser ensaiados com uma tensão igual a 1,5 vez a tensão nominal, com um mínimo de 1 000 V, se a tensão nominal for igual ou superior a 100 V, e um mínimo de 500 V, se a tensão nominal for inferior a 100 V.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 53
12 Sobrecorrente ocasional
12.1 Generalidades
12.1.1 A capabilidade de sobrecorrente de motores de indução é dada com a finalidade de coordenar estes motores com os dispositivos de comando e proteção. Ensaio para demonstrar esta capabilidade não consta nesta parte da ABNT NBR 17094.
12.1.2 O efeito do aquecimento nos enrolamentos do motor varia aproximadamente com o produto do tempo pelo quadrado da corrente. Uma corrente superior à corrente nominal provoca um aumento adicional de temperatura. Salvo acordo em contrário entre fabricante e comprador, pode ser assumido que o motor não funcionará com a sobrecorrente ocasional especificada por mais do que alguns curtos períodos durante a sua vida.
12.2 Valor da sobrecorrente ocasional
Os motores trifásicos cuja potência nominal é inferior ou igual a 315 kW e cuja tensão nominal é inferior ou igual a 1 kV devem ser capazes de suportar uma corrente igual a 1,5 vez a corrente nominal durante um mínimo de 2 min.
NOTA Para os motores trifásicos de potência nominal superior a 315 kW, nenhuma sobrecorrente ocasional é especificada.
13 Excesso de conjugado momentâneo
13.1 Motores de indução trifásicos para aplicação geral
Estes motores devem, qualquer que seja seu regime e construção, ser capazes de suportar durante 15 s, sem parada ou mudança brusca de velocidade (sob aumento gradual do conjugado), um excesso de conjugado de no mínimo 60 % do seu conjugado nominal, sob tensão e freqüência nominais.
Os motores para regime tipo S9 devem ser capazes de suportar momentaneamente um excesso de conjugado determinado conforme o regime especificado.
NOTA Para uma determinação aproximada das variações de temperatura devido à evolução das perdas em função da corrente, a constante de tempo térmica equivalente, determinada conforme 9.3.11, pode ser utilizada.
13.2 Motores de indução trifásicos para aplicações específicas
13.2.1 Os motores destinados a aplicações específicas que exigem um conjugado elevado, por exemplo, motores para equipamentos de elevação, devem ser objeto de acordo entre fabricante e comprador.
13.2.2 Para os motores de indução de gaiola projetados para assegurar uma corrente de partida inferior a4,5 vezes a corrente nominal, o excesso de conjugado pode ser inferior a 60 % do seu conjugado nominal, mas não inferior a 50 % deste valor.
13.2.3 No caso de motores de indução com características de partida especiais, por exemplo, motores utilizados com freqüência variável ou motores de indução alimentados por meio de conversores estáticos, o valor do excesso de conjugado deve ser objeto de acordo entre fabricante e comprador.
14 Conjugado mínimo de partida
Exceto se especificado em contrário, os valores mínimos de conjugado mínimo de partida para motores categoria N e H não devem ser inferiores a 30 % do conjugado nominal do motor.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
54 © ABNT 2008 - Todos os direitos reservados
15 Velocidade segura de funcionamento para motores de indução de gaiola
Todos os motores de indução de gaiola, de carcaça inferior ou igual a 315 e tensão inferior ou igual a 1 kV, devem ser capazes de funcionar segura e continuamente a velocidades até a velocidade apropriada conforme especificado na Tabela 18, salvo informação contrária declarada na placa de identificação.
NOTA Quando funcionando a velocidades acima da velocidade nominal, por exemplo, quando usado com controle de velocidade ajustável (inversor), os níveis de ruído (ver ABNT NBR 7565) e vibração (ver ABNT NBR 11390) aumentarão. O usuário pode requerer um balanceamento fino no rotor do motor para funcionamento aceitável à velocidade acima da nominal. A vida útil do rolamento pode ser reduzida. Atenção deve ser dada à vida útil de serviço da graxa e aos intervalos de relubrificação.
Tabela 18 — Máxima velocidade segura de funcionamento (rpm)de motores de indução de gaiola trifásicos de única velocidade
alimentados com tensão inferior ou igual a 1 kV
Carcaça Dois pólos Quatro pólos Seis pólos
100 5 200 3 600 2 400
112 5 200 3 600 2 400
132 4 500 2 700 2 400
160 4 500 2 700 2 400
180 4 500 2 700 2 400
200 4 500 2 300 1 800
225 3 600 2 300 1 800
250 3 600 2 300 1 800
280 3 600 2 300 1 800
315 3 600 2 300 1 800
NOTA Os valores acima podem ter que ser reduzidos de encontro com os requisitos da IEC 60079-1.
16 Sobrevelocidade
16.1 Os motores de indução devem ser projetados para, em uma emergência, suportar as velocidadesespecificadas na Tabela 19.
16.2 O ensaio de sobrevelocidade não é normalmente considerado necessário, mas deve ser realizado quando especificado e tiver sido objeto de acordo entre fabricante e comprador. A duração deste ensaio deve ser,em todos os casos, de 2 min.
16.3 Antes da realização do ensaio de sobrevelocidade, o motor deve ser cuidadosamente inspecionado para assegurar que:
a) os parafusos e dispositivos de fixação das partes girantes e estáticas estejam apertados e em boas condições;
b) o rotor esteja devidamente balanceado;
c) peças e ferramentas não tenham sido deixadas no equipamento, especialmente na parte girante.
Enfim, todas as precauções devem ser tomadas, a fim de proteger o pessoal e o equipamento de possíveis danos.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 55
16.4 Durante a realização do ensaio, também deve ser lida a velocidade de rotação com um tacômetro ou outro instrumento indicador de velocidade de rotação à distância. O instrumento escolhido deve ser calibrado com os lides utilizados no ensaio, sendo a leitura verificada na velocidade de rotação normal.
16.5 Se o motor a ser ensaiado for acionado por meio de um motor auxiliar, ele deve estar desligado de qualquer fonte de energia elétrica.
16.6 Após a realização do ensaio o motor deve ser cuidadosamente inspecionado. O ensaio de sobrevelocidade deve ser considerado satisfatório se, em seguida a ele, não for constatada nenhuma deformação permanente anormal, nem outra alteração indicativa de que o motor não está apto a funcionar normalmente e desde que os enrolamentos do rotor satisfaçam o ensaio dielétrico especificado.
Tabela 19 — Sobrevelocidade
Item Tipo de motorVelocidade especificada para ensaio de
sobrevelocidade
1 Todos os motores de indução, exceto os especificados abaixo
1,2 vez a velocidade nominal máxima
2 Motores que podem ser, sob certas circunstâncias, acionados pela carga
A velocidade de disparo especificada para o grupo, mas no mínimo 1,2 vez a velocidade nominal máxima
3 Motores de indução de gaiola, trifásicos, de única velocidade e alimentados com tensão inferior ou igual a 1 kV, especificados na Seção 15
1,2 vez a máxima velocidade segura de funcionamento
17 Rendimento e perdas
17.1 Valores de rendimento de plena carga
Para motores de indução de gaiola, trifásicos, regime tipo S1, uma velocidade, categorias N e H, grau de proteção IP44, IP54 ou IP55, de potência nominal igual ou superior a 0,75 kW (1 cv) e até 260 kW (350 cv) em dois pólos, 0,75 kW (1 cv) e até 370 kW (500 cv) em quatro pólos, 0,75 kW (1 cv) e até 330 kW (450 cv) em seis pólos, ou 0,75 kW (1 cv) e até 260 kW (350 cv) em oito pólos, 60 Hz, tensão nominal igual ou inferior a 600 V, qualquer forma construtiva, são estabelecidas duas linhas padronizadas no que se refere ao rendimento de plena carga, especificadas em 17.1.1 e 17.1.2. Para quaisquer outros motores de indução não há valores de rendimento normalizados nem método de ensaio estabelecido, cabendo ao fabricante marcar o rendimento na placa de identificação e indicar o método de ensaio.
NOTA 1 Os motores de formas construtivas verticais são ensaiados na horizontal com rolamentos radiais.
NOTA 2 Para motores com selo mecânico ou retentor, o rendimento é aferido em ensaios com a sua retirada, ou seja, sem os selos ou retentores instalados.
17.1.1 Linha-padrão
Os motores desta linha possuem rendimento nominal (ver 17.1.2 NOTA 1) igual ou superior ao normalizado para cada combinação potência versus velocidade síncrona, conforme a Tabela 20. Este rendimento nominal,na condição de plena carga, deve ser marcado na placa de identificação (ver 17.1.2 NOTA 2). O rendimento mínimo do motor não deve ser inferior ao valor obtido, aplicando-se ao rendimento nominal a tolerância estabelecida na Seção 24.
Os motores da linha-padrão são fabricados nas carcaças normalizadas, indicadas na Seção 20.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
56 © ABNT 2008 - Todos os direitos reservados
Tabela 20 — Menores valores de rendimento nominal a plena carga, para motoresda linha-padrão
Potência nominalVelocidade síncrona
rpm
kW cv3 600 1 800 1 200 900
Rendimento nominal
0,75 1,0 77,0 78,0 73,0 66,0
1,1 1,5 78,5 79,0 75,0 73,5
1,5 2,0 81,0 81,5 77,0 77,0
2,2 3,0 81,5 83,0 78,5 78,0
3,0 4,0 82,5 83,0 81,0 79,0
3,7 5,0 84,5 85,0 83,5 80,0
4,4 6,0 85,0 85,5 84,0 82,0
5,5 7,5 86,0 87,0 85,0 84,0
7,5 10,0 87,5 87,5 86,0 85,0
9,2 12,5 87,5 87,5 87,5 86,0
11,0 15,0 87,5 88,5 89,0 87,5
15,0 20,0 88,5 89,5 89,5 88,5
18,5 25,0 89,5 90,5 90,2 88,5
22,0 30,0 89,5 91,0 91,0 90,2
30,0 40,0 90,2 91,7 91,7 90,2
37,0 50,0 91,5 92,4 91,7 91,0
45,0 60,0 91,7 93,0 91,7 91,0
55,0 75,0 92,4 93,0 92,1 91,5
75,0 100 93,0 93,2 93,0 92,0
90,0 125 93,0 93,2 93,0 92,5
110 150 93,0 93,5 94,1 92,5
130 175 93,5 94,1 94,1 93,8
150 200 94,1 94,5 94,1 94,0
185 250 94,1 94,5 94,1 94,0
220 300 94,1 95,0 94,5 94,0
260 350 94,1 95,0 94,5 94,5
300 400 - 95,0 94,7 -
330 450 - 95,4 95,0 -
370 500 - 95,4 - -
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
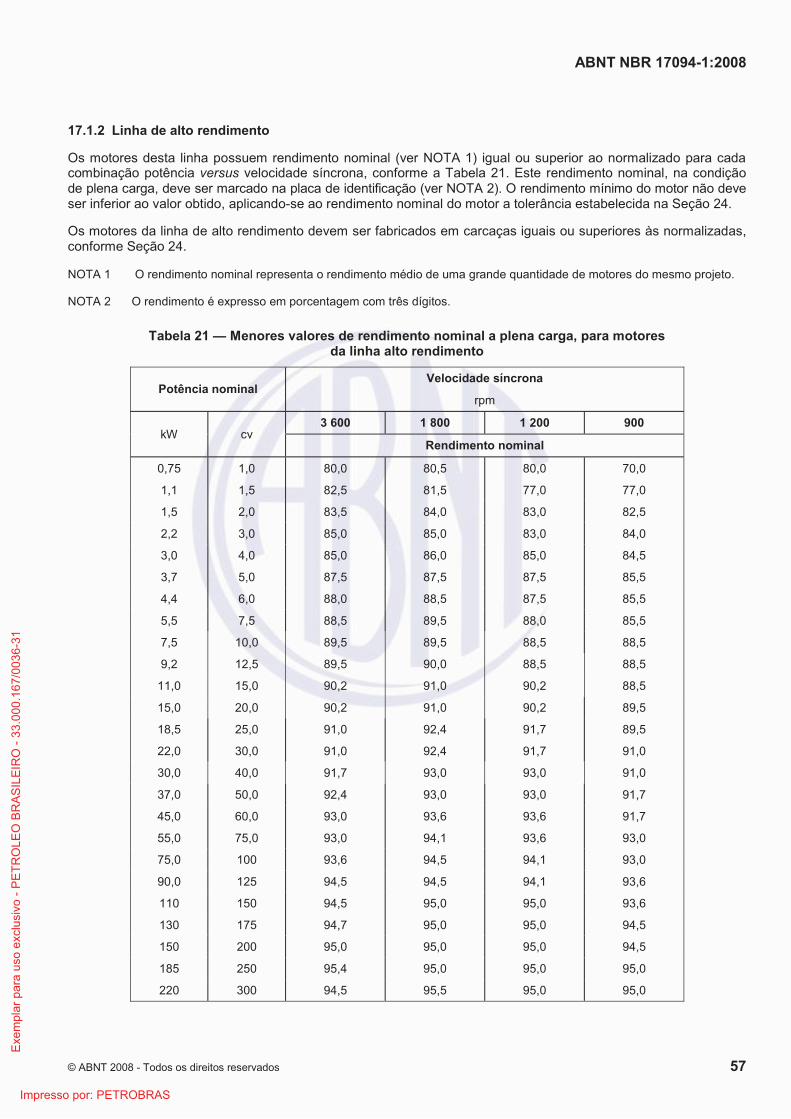
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 57
17.1.2 Linha de alto rendimento
Os motores desta linha possuem rendimento nominal (ver NOTA 1) igual ou superior ao normalizado para cada combinação potência versus velocidade síncrona, conforme a Tabela 21. Este rendimento nominal, na condição de plena carga, deve ser marcado na placa de identificação (ver NOTA 2). O rendimento mínimo do motor não deve ser inferior ao valor obtido, aplicando-se ao rendimento nominal do motor a tolerância estabelecida na Seção 24.
Os motores da linha de alto rendimento devem ser fabricados em carcaças iguais ou superiores às normalizadas, conforme Seção 24.
NOTA 1 O rendimento nominal representa o rendimento médio de uma grande quantidade de motores do mesmo projeto.
NOTA 2 O rendimento é expresso em porcentagem com três dígitos.
Tabela 21 — Menores valores de rendimento nominal a plena carga, para motoresda linha alto rendimento
Potência nominalVelocidade síncrona
rpm
kW cv3 600 1 800 1 200 900
Rendimento nominal
0,75 1,0 80,0 80,5 80,0 70,0
1,1 1,5 82,5 81,5 77,0 77,0
1,5 2,0 83,5 84,0 83,0 82,5
2,2 3,0 85,0 85,0 83,0 84,0
3,0 4,0 85,0 86,0 85,0 84,5
3,7 5,0 87,5 87,5 87,5 85,5
4,4 6,0 88,0 88,5 87,5 85,5
5,5 7,5 88,5 89,5 88,0 85,5
7,5 10,0 89,5 89,5 88,5 88,5
9,2 12,5 89,5 90,0 88,5 88,5
11,0 15,0 90,2 91,0 90,2 88,5
15,0 20,0 90,2 91,0 90,2 89,5
18,5 25,0 91,0 92,4 91,7 89,5
22,0 30,0 91,0 92,4 91,7 91,0
30,0 40,0 91,7 93,0 93,0 91,0
37,0 50,0 92,4 93,0 93,0 91,7
45,0 60,0 93,0 93,6 93,6 91,7
55,0 75,0 93,0 94,1 93,6 93,0
75,0 100 93,6 94,5 94,1 93,0
90,0 125 94,5 94,5 94,1 93,6
110 150 94,5 95,0 95,0 93,6
130 175 94,7 95,0 95,0 94,5
150 200 95,0 95,0 95,0 94,5
185 250 95,4 95,0 95,0 95,0
220 300 94,5 95,5 95,0 95,0
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
58 © ABNT 2008 - Todos os direitos reservados
Tabela 21 (continuação)
Potência nominalVelocidade síncrona
rpm
kW cv3 600 1 800 1 200 900
Rendimento nominal
260 350 95,0 95,5 95,4 95,0
300 400 - 95,5 95,4 -
330 450 - 95,8 95,4 -
370 500 - 95,8 - -
17.2 Determinação do rendimento e das perdas
Para os motores de 17.1.1 e 17.1.2, o rendimento e as perdas devem ser determinados de acordo com o método de ensaio da ABNT NBR 5383-1, denominado “ensaio dinamométrico com medição indireta das perdas suplementares e medição direta das perdas no estator (I2R), no rotor (I2R), no núcleo e por atrito e ventilação”. O rendimento deve ser determinado à potência, tensão e freqüência nominais.
As perdas a serem incluídas na determinação do rendimento são as seguintes:
a) perdas I2R no enrolamento do estator;
b) perdas I2R no enrolamento do rotor;
c) perdas no núcleo;
d) perdas por atrito e ventilação;
e) perdas suplementares.
A potência requerida por itens auxiliares, tais como bombas ou ventiladores externos que são necessários para a operação do motor, deve ser indicada em separado.
As perdas I2R devem ser corrigidas para uma temperatura igual à temperatura ambiente de 25 °C mais a elevação de temperatura determinada com carga nominal pelo método da variação da resistência. Quando a elevação de temperatura à potência nominal não tiver sido calculada, as perdas I2R devem ser corrigidas para a temperatura de referência indicada na Tabela 22.
Para determinação da temperatura de referência, deve ser utilizada a classificação térmica marcada na placa de identificação. No caso em que a elevação de temperatura admissível for a de uma classificação térmica inferior, a temperatura de referência deve ser a correspondente a esta classificação térmica inferior.
Tabela 22 — Temperatura de referência
Classificação térmica do isolamento 130 (B) 155 (F) 180 (H)
Temperatura de referência
°C95 115 130
18 Nível de ruído
Os limites máximos do nível de potência sonora, em decibéis, de um motor de indução, funcionando em vazio estão especificados na ABNT NBR 7565.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
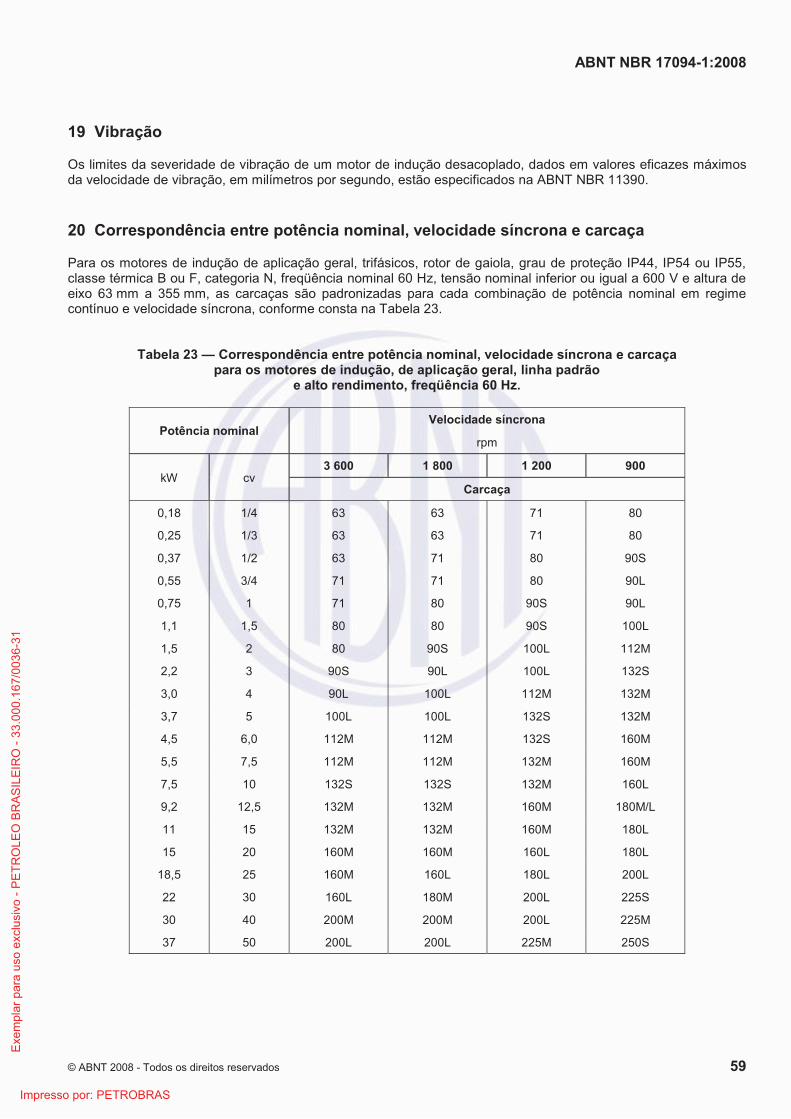
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 59
19 Vibração
Os limites da severidade de vibração de um motor de indução desacoplado, dados em valores eficazes máximos da velocidade de vibração, em milímetros por segundo, estão especificados na ABNT NBR 11390.
20 Correspondência entre potência nominal, velocidade síncrona e carcaça
Para os motores de indução de aplicação geral, trifásicos, rotor de gaiola, grau de proteção IP44, IP54 ou IP55, classe térmica B ou F, categoria N, freqüência nominal 60 Hz, tensão nominal inferior ou igual a 600 V e altura de eixo 63 mm a 355 mm, as carcaças são padronizadas para cada combinação de potência nominal em regime contínuo e velocidade síncrona, conforme consta na Tabela 23.
Tabela 23 — Correspondência entre potência nominal, velocidade síncrona e carcaçapara os motores de indução, de aplicação geral, linha padrão
e alto rendimento, freqüência 60 Hz.
Potência nominalVelocidade síncrona
rpm
kW cv3 600 1 800 1 200 900
Carcaça
0,18 1/4 63 63 71 80
0,25 1/3 63 63 71 80
0,37 1/2 63 71 80 90S
0,55 3/4 71 71 80 90L
0,75 1 71 80 90S 90L
1,1 1,5 80 80 90S 100L
1,5 2 80 90S 100L 112M
2,2 3 90S 90L 100L 132S
3,0 4 90L 100L 112M 132M
3,7 5 100L 100L 132S 132M
4,5 6,0 112M 112M 132S 160M
5,5 7,5 112M 112M 132M 160M
7,5 10 132S 132S 132M 160L
9,2 12,5 132M 132M 160M 180M/L
11 15 132M 132M 160M 180L
15 20 160M 160M 160L 180L
18,5 25 160M 160L 180L 200L
22 30 160L 180M 200L 225S
30 40 200M 200M 200L 225M
37 50 200L 200L 225M 250S
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
60 © ABNT 2008 - Todos os direitos reservados
Tabela 23 (continuação)
Potência nominalVelocidade síncrona
rpm
kW cv3 600 1 800 1 200 900
Carcaça
45 60 225S 225S 250S 250M
55 75 225M 225M 250M 280S
75 100 250M 250M 280S 280M
90 125 280S 280S 280M 315M
110 150 280M 280M 315M 315M
132 175 315S 315S 315M 355
150 200 315S 315S 315M 355
185 250 315M 315M 355 355
220 300 355 355 355 355
260 350 355 355 355 355
300 400 - 355 355
330 450 - 355 355
370 500 - 355
21 Requisitos construtivos
21.1 Terminais de aterramento
21.1.1 Os motores de indução devem ser fornecidos com um terminal de aterramento ou outro dispositivo para permitir a conexão de um condutor de proteção ou um condutor de aterramento.
O símbolo ou a legenda deve idetificar este dispositivo. Este requisito não se aplica a motores quando:
a) estiver instalado com isolação suplementar; ou
b) estiver destinado para montagem em aparelho contendo isolação suplementar; ou
c) estiverem especificadas tensões nominais até 50 V e destinados para uso em circuitos seguros de extra baixa tensão (SLV).
21.1.2 No caso de motores com tensões nominais maiores que 50 V, porém não excedendo 1 000 V, o terminal para o condutor de aterramento deve estar localizado na proximidade dos terminais dos condutores de linha, no interior da caixa de ligações, quando existente. Os motores com potência nominal superior a 100 kW devem ter, adicionalmente, um terminal de aterramento fixado na carcaça.
21.1.3 Os motores com tensão nominal superior a 1 000 V devem ter um terminal de aterramento na carcaça e, adicionalmente, um meio de conexão no interior da caixa de ligações para a blindagem condutora do cabo, quando existente.
21.1.4 O terminal de aterramento deve ser projetado para assegurar uma boa conexão com o condutor de aterramento, sem qualquer dano ao condutor ou ao terminal. As partes condutoras acessíveis não energizadas devem ser conectadas umas às outras e ao terminal de aterramento por uma ligação elétrica. Quando todos os mancais e o enrolamento do rotor são isolados, o eixo deve ser ligado eletricamente ao terminal de aterramento, a menos que o fabricante e o comprador concordem com um meio alternativo de proteção.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
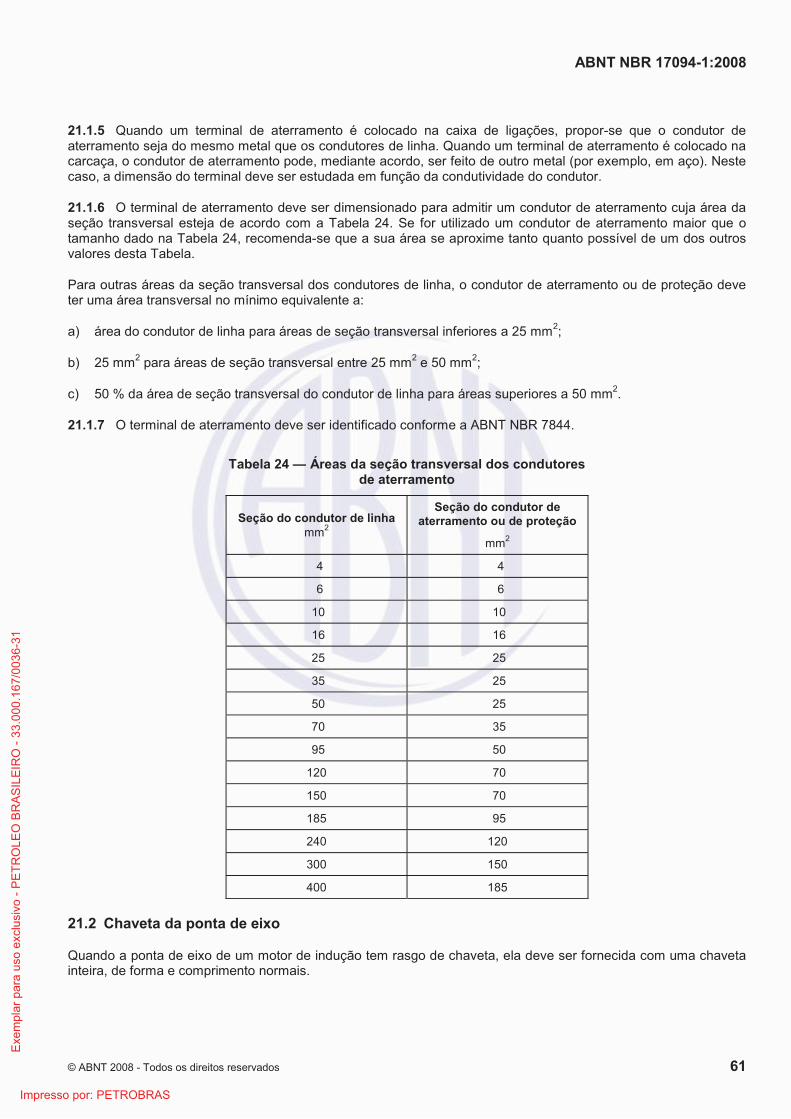
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 61
21.1.5 Quando um terminal de aterramento é colocado na caixa de ligações, propor-se que o condutor de aterramento seja do mesmo metal que os condutores de linha. Quando um terminal de aterramento é colocado na carcaça, o condutor de aterramento pode, mediante acordo, ser feito de outro metal (por exemplo, em aço). Neste caso, a dimensão do terminal deve ser estudada em função da condutividade do condutor.
21.1.6 O terminal de aterramento deve ser dimensionado para admitir um condutor de aterramento cuja área da seção transversal esteja de acordo com a Tabela 24. Se for utilizado um condutor de aterramento maior que o tamanho dado na Tabela 24, recomenda-se que a sua área se aproxime tanto quanto possível de um dos outros valores desta Tabela.
Para outras áreas da seção transversal dos condutores de linha, o condutor de aterramento ou de proteção deve ter uma área transversal no mínimo equivalente a:
a) área do condutor de linha para áreas de seção transversal inferiores a 25 mm2;
b) 25 mm2 para áreas de seção transversal entre 25 mm2 e 50 mm2;
c) 50 % da área de seção transversal do condutor de linha para áreas superiores a 50 mm2.
21.1.7 O terminal de aterramento deve ser identificado conforme a ABNT NBR 7844.
Tabela 24 — Áreas da seção transversal dos condutoresde aterramento
Seção do condutor de linha mm2
Seção do condutor de aterramento ou de proteção
mm2
4 4
6 6
10 10
16 16
25 25
35 25
50 25
70 35
95 50
120 70
150 70
185 95
240 120
300 150
400 185
21.2 Chaveta da ponta de eixo
Quando a ponta de eixo de um motor de indução tem rasgo de chaveta, ela deve ser fornecida com uma chaveta inteira, de forma e comprimento normais.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
62 © ABNT 2008 - Todos os direitos reservados
22 Marcação
22.1 Requisitos gerais
22.1.1 Todo motor de indução deve conter as informações indicadas em 22.2, marcadas de forma legível, indelével e durável (por gravação, impressão ou outro meio aceitável), diretamente na carcaça do motor ou em uma ou mais placas de identificação fixadas firmemente no motor, de modo a serem facilmente visíveis na posição de utilização determinada pela sua forma construtiva e disposição de montagem (ver ABNT NBR 5031).
22.1.2 Os símbolos literais das grandezas, quando marcados, devem estar de acordo com a IEC 60027-1 e IEC 60027-4 e as unidades devem ser conforme o quadro geral de unidades de medida aprovado pelo CONMETRO. As abreviações recomendadas para algumas informações a serem marcadas estão colocadas entre parênteses em 22.2.
22.1.3 Se o motor for instalado em um equipamento de tal modo que sua marcação não seja facilmente legível, o fabricante deve, mediante solicitação, fornecer uma placa adicional a ser colocada em local adequado do equipamento.
22.1.4 Os motores com potência nominal igual ou inferior a 750 W (1 cv) e com dimensões não enquadradas na ABNT NBR 5432 e os motores embutidos para aplicação especial, com potência nominal igual ou inferior a 3 kW (4 cv), devem ser marcados no mínimo com as informações de 22.2, alíneas a), b), c), k), l), m) e p). Em todos os outros casos, a marcação deve incluir no mínimo as informações listadas em 22.2, quando aplicáveis.
22.1.5 As informações constantes em 22.2 estão ordenadas apenas para referência, mas a ordem na qual são marcadas não é normalizada. Estas informações devem ser agrupadas de modo adequado. Estas informações não necessariamente devem ser colocadas em uma única placa de identificação.
22.1.6 Dois valores nominais diferentes devem ser indicados por X/Y e uma faixa de valores operativos entre Xe Y por X-Y.
22.2 Lista de informações constantes na marcação
a) nome e/ou marca do fabricante;
b) modelo (MOD) atribuído pelo fabricante;
NOTA O modelo é utilizado para identificar um ou mais motores, elétrica e mecanicamente idênticos.
c) número de série (nº) e/ou código de data de fabricação;
d) denominação principal do equipamento: “motor de indução” e tipo do motor (de gaiola ou de anéis);
NOTA No caso de motores de alto rendimento, a expressão ”alto rendimento” tem que ser mencionada.
e) número de fases;
f) número desta Norma (ABNT NBR 17094), quando o motor nela se enquadrar;
g) designação da carcaça da máquina, quando esta se enquadrar na ABNT NBR 5432;
NOTA Pode ser omitida quando constar no modelo.
h) grau de proteção proporcionado pelo invólucro conforme a ABNT NBR 9884 (IP-XX);
i) classificação térmica (ISOL). Quando as classificações térmicas do estator e do rotor forem diferentes, ambas devem ser marcadas com a do estator em primeiro lugar;
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 63
NOTA 1 Quando o limite de elevação de temperatura (/!) ou de temperatura total (!) for inferior ao normalizado para a respectiva classificação térmica, essa informação também é colocada na placa e, se necessário, o método de medição.
NOTA 2 No caso de motores com enrolamentos resfriados indiretamente e com trocador de calor resfriado a água, a classificação térmica é seguida por “P” ou “S” dependendo se a elevação de temperatura é medida acima da temperatura do fluido refrigerante primário ou secundário (ver 9.4.1.3.2).
j) classe de características nominais ou regime tipo do motor (REG), quando esta(s) for(em) diferente(s) do regime contínuo (regime tipo S1), ver seção 4;
k) potência(s) nominal(is);
l) tensão(ões) nominal(is). Duas tensões nominais X e Y devem ser marcadas X/Y;
m) freqüência nominal;
n) corrente(s) nominal(is), com marcação similar à das tensões;
o) velocidade(s) de rotação nominal(is);
p) diagrama de ligações, para motores cuja ligação possa ser feita de vários modos. Este diagrama deve estar marcado na placa de identificação ou marcado próximo à caixa de ligações ou no interior desta;
NOTA Os terminais são marcados indelevelmente, de modo a permitir a utilização correta do diagrama de ligações.
q) sobrevelocidade admissível, quando diferente de 1,2 vez a velocidade nominal;
r) fator de potência nominal;
s) tensão entre anéis coletores em circuito aberto e corrente rotórica sob condições nominais, para motores de anéis (SEC);
t) rendimento nominal para motores categorias N e H;
u) categoria, quando aplicável, conforme Seção 8 (CAT);
v) razão da corrente com rotor bloqueado para a corrente nominal, devendo ser indicada a maior razão no caso de motores de várias velocidades (Ip/In);
w) temperatura ambiente máxima admissível, quando diferente de 40 °C (AMB). Temperatura máxima admissível da água, quando diferente de 25 °C (água);
x) temperatura ambiente mínima admissível, quando diferente da especificada em 6.4;
y) altitude para a qual o motor foi projetado, quando superior a 1 000 m (ALT);
z) fator de serviço, quando diferente de 1,0;
aa) massa total aproximada do motor, quando superior a 30 kg;
bb) números dos rolamentos;
cc) sentido de rotação para motores previstos para funcionamento em um único sentido de rotação;
NOTA 1 Para motores de anéis são omitidas as informações de 22.2-t), u), v) e z).
NOTA 2 Exceto para manutenção normal, quando um motor é reparado ou revisado, uma placa adicional é fornecida para indicar o nome da companhia responsável pelo trabalho, o ano do reparo e as alterações realizadas.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
64 © ABNT 2008 - Todos os direitos reservados
22.3 Folha de dados
Sempre que solicitado pelo comprador, o fabricante deve fornecer uma folha de dados incluindo os dados especificados pelo comprador, complementados por outros que o fabricante julgar convenientes, atendendo no mínimo ao Anexo C.
23 Inspeção
23.1 Relação dos ensaios
23.1.1 A inspeção de motores de indução, para verificação de seu desempenho, deve incluir ensaios a serem realizados no motor, escolhidos entre os relacionados na Tabela 25.
23.1.2 Os ensaios devem ser realizados, sempre que possível, nas instalações do fabricante, conforme a ABNT NBR 5383-1 ou norma específica indicada na Tabela 25. Quando isso não for possível, o local de ensaio, os ensaios a serem realizados e os métodos utilizados devem ser objeto de acordo entre fabricante e comprador e constar na ordem de compra.
23.1.3 Os requisitos a serem atendidos por ocasião dos ensaios constam em alguns casos na especificação do comprador, mas quando isso não ocorrer, devem ser adotados os requisitos constantes nesta Norma ou em alguma outra norma específica, objeto de acordo entre fabricante e comprador e constar na ordem de compra. Estes requisitos estão sujeitos às tolerâncias indicadas na Seção 24.
23.1.4 A solicitação de ensaios com a presença de um inspetor do comprador ou de um representante autorizado deve ter acordo prévio com o fabricante e constar na ordem de compra.
23.2 Classificação dos ensaios
23.2.1 A Tabela 25, além de indicar os ensaios que podem ser realizados em motores de indução para verificação do seu desempenho, classifica-os em ensaios de rotina, de tipo e especiais (ver 3.14, 3.15 e 3.16).
NOTA Ensaios em que há solicitação de curvas características são considerados ensaios especiais (ver itens 4, 5, 7 e 9 da Tabela 25).
23.2.2 Quando for impraticável a realização dos ensaios com rotor bloqueado, de partida e de conjugado máximo, sob tensão nominal, estes podem ser realizados com tensão reduzida.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 65
Tabela 25 — Ensaios para verificação do desempenho de motores de indução
Item Relação dos ensaios
Ensaio (de/para)
Classificação do ensaioObservações
Rotina Tipo Especial
1 Medição da resistência de isolamento X X
2 Medição da resistência elétrica do enrolamento (do estator e do rotor para motores de anéis, a frio)
X X
3 Dielétrico X X Ver Seção 11
4 Em vazio (sob tensão nominal)
para determinação de:
4.1 Potência de entrada
4.2 Corrente
4.3 Sentido de rotação
X X Permite a determinação da soma das perdas no núcleo e das perdas por atrito e ventilação
Seqüência de fase positiva
5 Com rotor bloqueado (ver 23.2.5),
para determinação de:
5.1 Corrente
5.2 Conjugado (ver 23.2.5)
5.3 Potência absorvida
X Não aplicável a motores com rotor bobinado
6 Medição da tensão secundária X X Aplicável somente a motores com rotor bobinado
7 Partida (ver 23.2.5) com levantamento das curvas características conjugado versus velocidade versus corrente velocidade, para determinação de:
7.1 Conjugado de partida, incluindo os valores dos conjugados mínimo e máximo
7.2 Corrente de partida
X Não aplicável a motores com rotor bobinado, exceto para o conjugado máximo. Ver item 13
8 Temperatura X Ver Seção 9
9 Determinação do rendimento a 100 %, 75 % e 50 % da potência nominal
X
10 Determinação das perdas a 100 %, 75 % e 50 % da potência nominal
X
11 Determinação do fator de potência a 100 %, 75 % e 50 % da potência nominal
X
12 Determinação do escorregamento a 100 %, 75 % e 50 % da potência nominal
X
13 Determinação do conjugado máximo (ver 23.2.5)
X
14 Sobrevelocidade X Ver Seção 16
15 Nível de ruído (potência sonora em vazio) X Ver ABNT NBR 7565
16 Tensão no eixo e medição da resistência de isolamento do mancal
X Geralmente feito em motores com potência nominal 350 kW (500 cv)
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
66 © ABNT 2008 - Todos os direitos reservados
Tabela 25 (continuação)
Item Relação dos ensaios
Ensaio (de/para)
Classificação do ensaioObservações
Rotina Tipo Especial
17 Vibração (valor eficaz máximo da velocidade de vibração em milímetros por segundo)
X Ver ABNT NBR 11390
18 Medição da tangente do ângulo de perdas X Para motores com tensão nominal 5 kV e 24 kV e com potência
nominal 5 MW (ver EN 50209)
24 Tolerâncias
A menos que declarado de outra forma, tolerâncias de valores declarados devem ser conforme especificados na Tabela 26.
Tabela 26 — Tolerâncias
Item Grandeza Tolerância
1 Rendimento a
,851
,851
+ sem limite
Valores em p.u.
2 Fator de potência, cos . 1/6 (1 – cos ), sendo 0,02 o valor mínimo e 0,07 o valor máximo a ser utilizado.
Ex.: sendo 0,92 o fator de potencia declarado de um determinado motor:
1/6 (1 – 0,92) = 0,013. Neste caso o valor a ser adotado é 0,02. Então:
0,92 – 0,02 = 0,90.
0,90 é o valor de fator de potência mínimo que o motor poderá apresentar como resultado de ensaio.
3 Escorregamento (a plena carga e à temperatura de funcionamento) de:
a) Pn < 1 kW
b) Pn 0%1%23
± 30 % do escorregamento garantido
± 20 % do escorregamento garantido
4 Corrente com rotor bloqueado para motores de gaiola com rotor em curto-circuito e com qualquer equipamento de partida especificado:
a) motores especificados pela categoria ou pelo correspondente valor máximo da potência aparente com rotor bloqueado (ver Seção 8)
b) motores não especificados conforme a)b
Nenhuma tolerância no limite superior, porém sem limite inferior
20 % do valor garantido, porém sem limite inferior
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 67
Tabela 26 (continuação)
Item Grandeza Tolerância
5 Conjugado com rotor bloqueado para:
a) motores especificados pela categoria ou pelo correspondente valor mínimo do conjugado (ver seção 8)
b) motores não especificados conforme a)b
Nenhuma tolerância no limite inferior
15 % do valor garantido
Não há limite superior, salvo acordo entre fabricante e comprador
6 Conjugado mínimo de partida para:
a) motores especificados pela categoria ou pelo correspondente valor mínimo do conjugado(ver Seção 8)
b) motores não especificados conforme a)b
Nenhuma tolerância no limite inferior
15 % do valor garantido
7 Conjugado máximo para:
a) motores especificados pela categoria ou pelo correspondente valor mínimo do conjugado(ver Seção 8)
b) motores não especificados conforme a)b
Nenhuma tolerância no limite inferior
10 % do valor garantido, desde que, aplicada esta tolerância, o conjugado permaneça igual ou superior a 1,6 vez ou 1,5 vez o conjugado nominal (ver Seção 13)
8 Momento de inércia ±10 % do valor garantidoa
A determinação do rendimento consta na ABNT NBR 5383-1.
bQuando for especificada a categoria e um valor garantido diferente do normalizado, a tolerância aplicada ao valor garantido não
pode resultar em um valor inferior (caso dos conjugados) ou em um valor superior (caso da corrente com rotor bloqueado) ao normalizado para a categoria.
25 Coordenação de tensões e potências
Não é prático fabricar motores de todas as potências para todas as tensões nominais. Em geral, para motores de indução trifásicos, baseados em considerações de projeto e produção, tensões nominais acima de 1 kV em termos de potência nominal são preferencialmente indicadas na Tabela 27.
Tabela 27 — Coordenação de tensões e potências
Tensão nominal
kV
Potência nominal mínima
kW
1,0 < UN 3,0 100
3,0 < UN 6,0 150
6,0 < UN 11,0 800
11,0 < UN 15,0 2 500
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
68 © ABNT 2008 - Todos os direitos reservados
Anexo A(informativo)
Efeitos de um sistema de tensões desequilibrado sobre as características de funcionamento de motores de indução trifásicos de gaiola
A.1 Generalidades
A.1.1 Quando o sistema trifásico de tensões aplicado aos terminais de um motor de indução trifásico de gaiola não é equilibrado, as correntes no enrolamento do estator são desiguais. Uma pequena percentagem de desequilíbrio entre as tensões causa um desequilíbrio muito maior nas correntes.
A.1.2 A aplicação de um sistema de tensões desequilibrado a um motor de indução trifásico introduz uma componente de seqüência negativa na tensão, e isto produz no entreferro um campo magnético de sentido inverso ao deslocamento do rotor, tendendo a produzir correntes elevadas nos enrolamentos. Uma pequena componente de seqüência negativa na tensão pode produzir correntes bem superiores àquelas existentes na condição de um sistema de tensões equilibrado. Conseqüentemente, a elevação da temperatura de um motor funcionando com um sistema de tensões desequilibrado será superior àquela do motor funcionando nas mesmas condições de carga, porém com um sistema de tensões equilibrado.
A.2 Efeitos de um sistema de tensões desequilibrado sobre as características de funcionamento de um motor
Os efeitos são os seguintes:
a) as correntes à velocidade de funcionamento normal serão fortemente desequilibradas, aproximadamente seis a dez vezes o desequilíbrio das tensões. As correntes com rotor bloqueado serão desequilibradas na mesma proporção que o desequilíbrio das tensões, porém a potência aparente com o motor bloqueado terá apenas um pequeno aumento;
b) os conjugados de rotor bloqueado, mínimo durante a partida e máximo serão menores. Se o desequilíbrio das tensões for muito severo, os conjugados podem não ser adequados para a aplicação do motor;
c) a velocidade a plena carga diminuirá levemente;
d) o nível de ruído e a vibração podem aumentar com o aumento do desequilíbrio das tensões. A vibração poderá ser destrutiva para o motor ou para o sistema.
A.3 Cálculo da percentagem de desequilíbrio das tensões
A.3.1 A percentagem de desequilíbrio das tensões é calculada facilmente pelo usuário do motor a partir da medição das tensões nas três fases e utilizando a equação:
100desvio máximo das tensões em relação ao valor médio
Percentagem de desequilíbrio das tensõesvalor médio
EXEMPLO Para os valores de tensões entre fases de 220 V, 215 V e 210 V, o valor médio da tensão é de 215 V e o desvio máximo da tensão em relação ao valor médio é de 5 V. Daí resulta:
5100 2,3%
215Percentagem de desequilíbrio das tensões
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
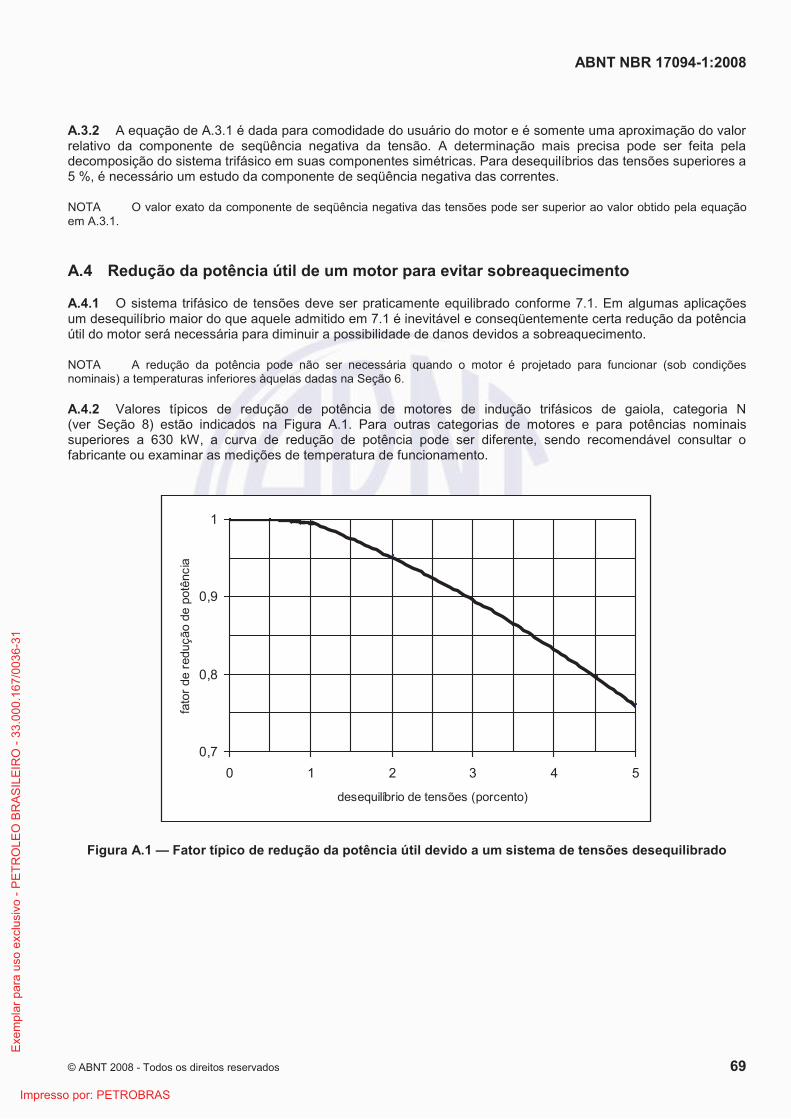
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 69
A.3.2 A equação de A.3.1 é dada para comodidade do usuário do motor e é somente uma aproximação do valor relativo da componente de seqüência negativa da tensão. A determinação mais precisa pode ser feita pela decomposição do sistema trifásico em suas componentes simétricas. Para desequilíbrios das tensões superiores a 5 %, é necessário um estudo da componente de seqüência negativa das correntes.
NOTA O valor exato da componente de seqüência negativa das tensões pode ser superior ao valor obtido pela equação em A.3.1.
A.4 Redução da potência útil de um motor para evitar sobreaquecimento
A.4.1 O sistema trifásico de tensões deve ser praticamente equilibrado conforme 7.1. Em algumas aplicações um desequilíbrio maior do que aquele admitido em 7.1 é inevitável e conseqüentemente certa redução da potência útil do motor será necessária para diminuir a possibilidade de danos devidos a sobreaquecimento.
NOTA A redução da potência pode não ser necessária quando o motor é projetado para funcionar (sob condições nominais) a temperaturas inferiores àquelas dadas na Seção 6.
A.4.2 Valores típicos de redução de potência de motores de indução trifásicos de gaiola, categoria N(ver Seção 8) estão indicados na Figura A.1. Para outras categorias de motores e para potências nominais superiores a 630 kW, a curva de redução de potência pode ser diferente, sendo recomendável consultar o fabricante ou examinar as medições de temperatura de funcionamento.
0,7
0,8
0,9
1
0 1 2 3 4 5
desequilíbrio de tensões (porcento)
fato
r de
red
ução
de
potê
ncia
Figura A.1 — Fator típico de redução da potência útil devido a um sistema de tensões desequilibrado
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
70 © ABNT 2008 - Todos os direitos reservados
A.5 Dispositivos de proteção contra sobrecargas para motores com redução da potência
A.5.1 Quando um motor tem sua potência reduzida para funcionamento em um sistema de tensões desequilibrado, a escolha e o ajuste do dispositivo de proteção contra sobrecargas devem levar em conta a combinação do fator de redução de potência aplicado ao motor e o aumento da corrente resultante do desequilíbrio das tensões. Este é um problema complexo, envolvendo a variação das correntes do motor em função da carga e do desequilíbrio das tensões, em adição às características do dispositivo de proteção contra sobrecargas no que se refere à corrente máxima ou ao valor médio das correntes.
A.5.2 Na ausência de informação específica, recomenda-se que os dispositivos de proteção contra sobrecargas sejam escolhidos e/ou ajustados no valor mínimo que não cause desligamento para o fator de redução da potência e o desequilíbrio das tensões, aplicáveis.
A.5.3 Quando é admissível ocorrer um desequilíbrio das tensões, recomenda-se ao usuário instalar dispositivos de proteção contra sobrecargas que sejam sensíveis à corrente máxima ao invés do valor médio da corrente.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 71
Anexo B(informativo)
Guia para a aplicação do regime tipo S10 e para a obtenção do valor da expectativa de vida térmica relativa (TL)
B.1 A carga do motor equivale, em qualquer momento, ao regime tipo S1. Entretanto, o ciclo de cargas pode incluir cargas diferentes da carga nominal baseada no regime tipo S1. Um ciclo de carga formado de quatrocombinações velocidade/carga constantes e distintas é mostrado na Figura 10.
B.2 Conforme o valor e a duração das diferentes cargas dentro de um ciclo, a expectativa de vida relativa do motor baseada no envelhecimento térmico do sistema de isolação pode ser calculada pela seguinte equação:
n
i
ktTL 1
i
i
21
Onde:
TL é a expectativa de vida térmica relativa expressa em percentagem da expectativa de vida térmica no caso de regime tipo S1 à potência nominal;
I é a diferença entre a elevação de temperatura do enrolamento para cada uma das diferentes cargas dentro de um ciclo e a elevação de temperatura admissível baseada no regime tipo S1 com a carga de referência;
ti é o tempo relativo (em p.u.) de uma carga constante dentro de um ciclo de carga;
k é o aumento de elevação de temperatura, em Kelvin, que causa uma redução de 50 % na expectativa de vida térmica do sistema de isolação;
n é o número de cargas distintas.
B.3 O valor de TL é parte integrante da identificação precisa da classe de características nominais.
B.4 O valor de TL somente pode ser determinado quando, em adição à informação sobre o ciclo de cargas conforme a Figura 10, o valor de k para o sistema de isolação for conhecido. Este valor de k deve ser determinado por meio experimental em conformidade com a IEC 60034-18 para toda faixa de temperatura coberta pelo ciclo de cargas conforme a Figura 10.
B.5 É mais razoável indicar a grandeza TL como um valor relativo. Este valor pode ser utilizado para estabelecer aproximadamente a variação real da expectativa de vida térmica em função daquela do regime tipo S1 à potência nominal, pois pode ser assumido, considerando as diferentes cargas existentes em um ciclo, que os outros efeitos sobre a expectativa de vida do motor (por exemplo, tensões dielétricas, influências do meio ambiente) são aproximadamente os mesmos que existem no caso do regime tipo S1 à potência nominal.
B.6 O fabricante do motor é responsável pela compilação correta dos vários parâmetros para determinação do valor de TL.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS

ABNT NBR 17094-1:2008
72 © ABNT 2008 - Todos os direitos reservados
Anexo C(normativo)
Folha de dados
C.1 A folha de dados deve conter no mínimo o seguinte:
a) todos os dados constantes na marcação conforme Seção 22;
b) nome do comprador;
c) identificação do pedido do comprador;
d) forma construtiva (ver ABNT NBR 5031);
e) conjugado nominal;
f) conjugado com rotor bloqueado para motores de gaiola;
g) conjugado máximo;
h) rendimentos adicionais a 75 % e 50 % da potência nominal;
i) fatores de potência adicionais a 75 % e 50 % da potência nominal;
j) tempo admissível com rotor bloqueado, partindo da temperatura de funcionamento;
k) tipo de lubrificação;
l) tipo de carga acionada, quando fornecido pelo comprador;
m) momento de inércia (J) ou efeito de inércia (GD2) da carga;
NOTA Salvo especificação em contrário, este dado é conforme Seção 8.
n) tipo de acoplamento;
NOTA Salvo especificação em contrário, considerar acoplamento direto.
o) método de partida.
NOTA Salvo especificação em contrário, considerar partida direta.
C.2 É recomendável também indicar:
a) especificação da escova no caso de motores de anéis;
b) acessórios incluídos;
c) ensaios previstos/realizados.
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS
ABNT NBR 17094-1:2008
© ABNT 2008 - Todos os direitos reservados 73
Bibliografia
[1] ABNT NBR 5110, Máquinas elétricas girantes – Classificação dos métodos de resfriamento – Classificação
[2] IEC 60050 (411), International electrotechnical vocabulary – Chapter 411: Rotating machines
Exem
pla
r para
uso e
xclu
siv
o -
PE
TR
OLE
O B
RA
SIL
EIR
O -
33.0
00.1
67/0
036-3
1
Impresso por: PETROBRAS