Embed Size (px)
Citation preview

A Sensor Fault Diagnosis Scheme for a DC/DC Converter
used in Hybrid Electric Vehicles
Hiba Al-SHEIKH
Ghaleb HOBLOS
Nazih MOUBAYED

2
Overview
Examined power converter system
Hardware prototype
Converter Modelling
Proposed residual-based fault diagnosis scheme
Bank of extended Kalman filters
Generalized likelihood ratio test
Tuning using receiver operating characteristic curve
Conclusion and future perspectives

3
Recent advances in power electronics encouraged the development of new initiatives for Hybrid Electric Vehicles (HEVs) with advanced multi-level power electronic systems.
Power converters are intensively used in HEVs• convert power at different levels• drive various load• electric drives

4
Intensive use of power converters in modern hybrid vehicles
Need for efficient methods of condition monitoring and fault diagnosis
Reliability of the automotive electrical power system

5
Controller
Power Converters
Sensors
Machine AC Side
Common Electrical Faults in Electric Drive Systems
Connectors/ DC Bus
Power Converters
• high power• relatively low voltage
high current
increase thermal and electric stresses on the converter components and
monitoring sensors

6
Controller
Power Converters
Sensors
Machine AC Side
Common Electrical Faults in Electric Drive Systems
Connectors/ DC Bus
• AC current sensor• DC bus voltage sensor
Power Converters
Sensors
Sensor faults in a DC/DC power converter system used in HEV

7
7
Observer-based
Fault diagnosis methods
Knowledge-based methods
Analytical model-based methods
Signal-based methods
Fault Diagnosis Techniques for Power Converters
Analytical model-based methods
For HEV applications where converters operate under variable load conditions, model-based diagnosis is of particular interest.

8
Examined Power Converter System
9
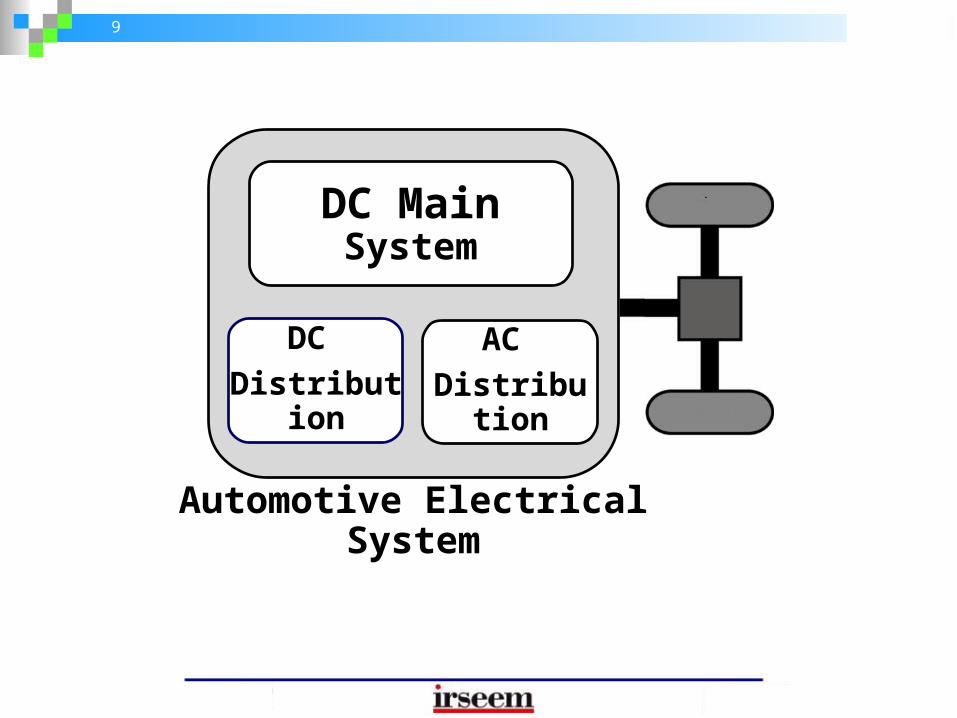
Automotive Electrical System
DC Main System
DC Distribution
AC Distribution

10
Power Converters DC/DC Choppers DC/AC Inverters AC/DC Rectifiers
Automotive Electrical System

11

12

13
Parallel DC-linked Multi-input DC/DC Converter consisting of two bidirectional half-bridge cells
DC bus
Energy Storage System AC Drive
BatteryPM
UC
Multi-port DC/DC
Converter
Inverter
Examined Power Converter System

14
Isolated topologies
boost-half bridge half-bridge full-bridge
Non-isolated topologies
SEPIC cuk buck-boost
Bidirectional DC/DC Converter Topologies
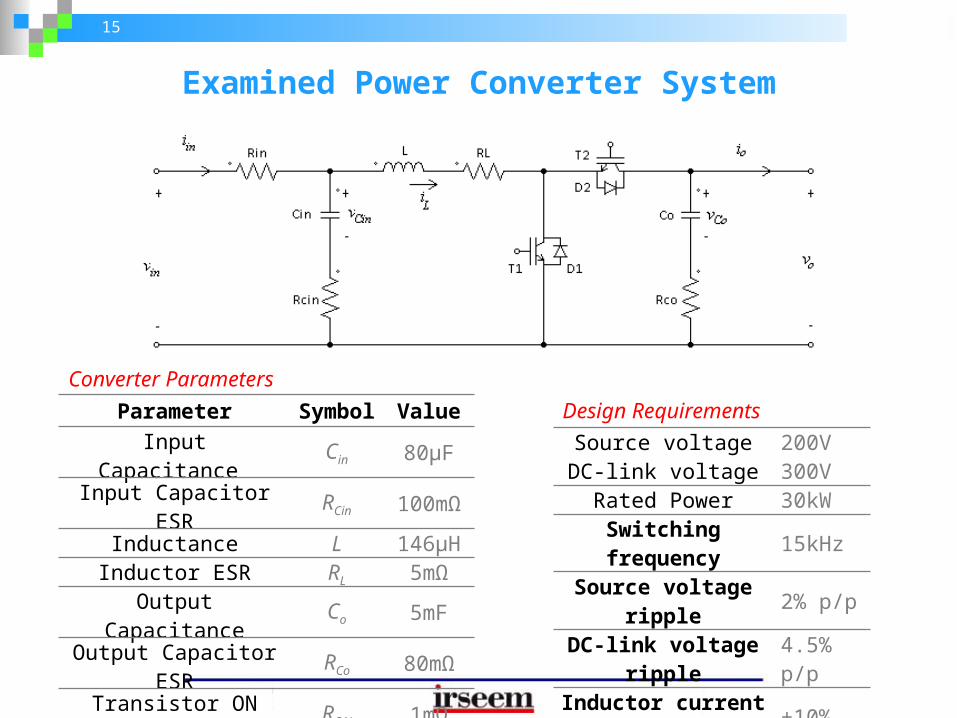
15
Source voltage 200VDC-link voltage 300V
Rated Power 30kWSwitching frequency 15kHzSource voltage ripple 2% p/pDC-link voltage ripple 4.5% p/p
Inductor current ripple ±10%
Design Requirements
Examined Power Converter System
Converter ParametersParameter Symbol Value
Input Capacitance Cin 80µFInput Capacitor ESR RCin 100mΩ
Inductance L 146µHInductor ESR RL 5mΩ
Output Capacitance Co 5mFOutput Capacitor ESR RCo 80mΩ
Transistor ON resistance RON 1mΩ

16
Examined Power Converter System
State variables
s
(duty cycle)

17
0 0.02 0.04 0.06 0.08 0.1194
196
198
200
x 1=v Cin
0 0.02 0.04 0.06 0.08 0.10
200
400
600
x 2=i L
0 0.02 0.04 0.06 0.08 0.1100
200
300
400
time (sec)
x 3=v Co
0 0.02 0.04 0.06 0.08 0.10
200
400
600
y 1=i in
0 0.02 0.04 0.06 0.08 0.1150
200
250
300
350
y 2=v o
time (sec)
State variables during healthy boost operation
Observed variables during healthy boost operation

18
Hardware Prototype of Converter System

19
Hardware Prototype
Experimental test bench Hardware prototype of bidirectional DC/DC converter
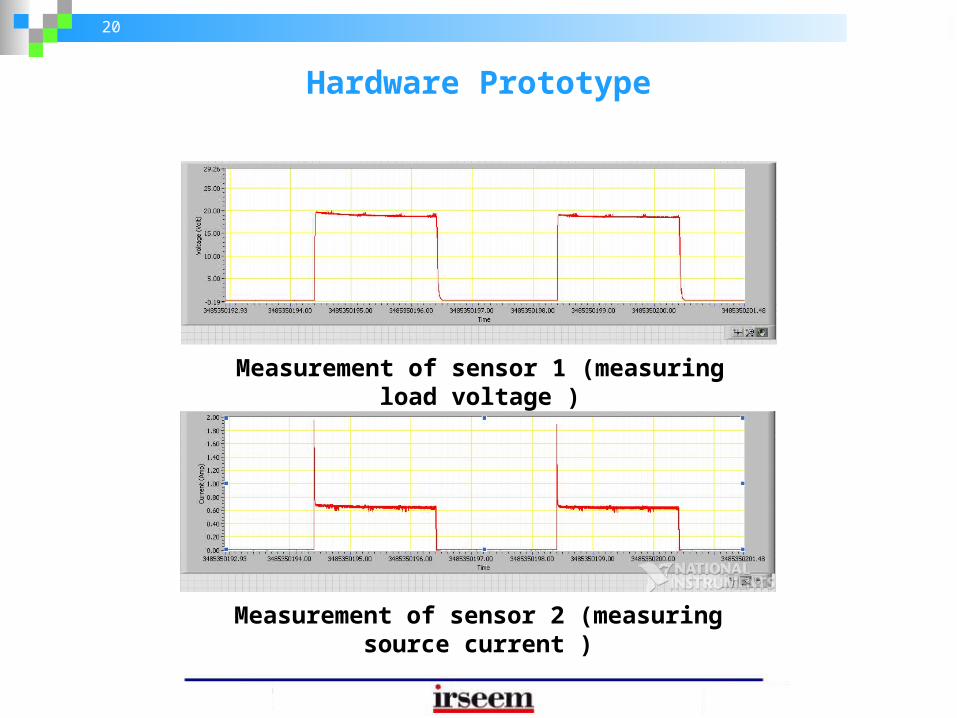
20
Measurement of sensor 1 (measuring load voltage )
Measurement of sensor 2 (measuring source current )
Hardware Prototype

21
Sensor 2 Sensor 1
Hardware Prototype

22
Modelling of Power Converter

23
Converter State-Space Model
The examined converter is a nonlinear and time-varying system
DC busBatteryPM
UC
Multi-input DC/DC
Converter
Inverter
Boost operation

24
Converter State-Space Model
The examined converter is a nonlinear and time-varying system
DC busBatteryPM
UC
Multi-input DC/DC
Converter
Inverter
Buck operation

25
Converter State-Space Model
The examined converter is a nonlinear and time-varying system
The converter state-space model is obtained in three steps:
1. Piece-wise linear state-space model2. Continuous-time nonlinear state-space model3. Discrete-time nonlinear state-space model

26
Switching configuration 2 (T1 OFF; D2 ON) Switching configuration 2 (T2 OFF; D1 ON)
Switching configuration 1 (T1 ON; D2 OFF) Switching configuration 1 (T2 ON; D1 OFF)
Converter State-Space Model
Boost mode Buck mode
1. During each switching configuration, the converter is linear and possesses a piece-wise switched linear state-space model

27
Converter State-Space Model
1. During each switching configuration, the converter is linear and possesses a piece-wise switched linear state-space model
Operation Mode
Switching State
T1 D1 T2 D2
j = 1 (Boost)
i = 1 ON OFF OFF OFF
i = 2 OFF OFF OFF ON
j = 2 (Buck)
i = 1 OFF OFF ON OFFi = 2 OFF ON OFF OFF

28
Converter State-Space Model
Operation Mode
Switching State
T1 D1 T2 D2
j = 1 (Boost)
i = 1 ON OFF OFF OFF
i = 2 OFF OFF OFF ON
j = 2 (Buck)
i = 1 OFF OFF ON OFFi = 2 OFF ON OFF OFF
where
averaged using as control variable
2. Averaged continuous-time model

29
Converter State-Space Model
2. Averaged continuous-time model
The continuous-time model is nonlinear The duty cycle is a function of the state variables, is obtained from the converter dynamics during steady state
where

30
01
0
11
01
o
iCin
iCinCoiCinONiCinLCinin
iCin
in
iCinin
in
iCinin
C
fL
f
LR
RRfRRfRRRR
LR
RRC
R
RC
x
xxxxAav
o
Co
iCin
Cin
iCinin
C
L
Rf
LR
RRC
10
1
01
xxB av
110
01
Co
iCin
Cin
iCin
RfR
R
Rx
xCav
Co
iCin
RR0
01
avD
.
Converter State-Space Model

31
Converter State-Space Model
3. The continuous-time model is discretized using first order hold with sampling period seconds.
Including process noise and measurement noise, the discrete-time state-space model becomes
and are white Gaussian, zero-mean, independent random processes with constant auto-covariance matrices Q and R.

32
Proposed Fault Diagnosis Algorithm

33
Fault Diagnosis of Converter Sensor Faults
Sensor 2
Sensor 1
Model-Based Residual Approach

34
Output variables
Input variables
Power Converter System
Residual Generation
Fault/No fault
Residual Evaluation
Residuals
Fault Diagnosis of Converter Sensor Faults

35
Residual Generation using Bank of Extended Kalman Filters

36
Converter state-space model
+ +
Converter input signals
Sensor measured signals
The Extended Kalman Filter (EKF)
Estimates of the measured signals ∑
+
- Residual signals“Innovations”

37
The Extended Kalman Filter (EKF)
Recursive application of prediction and correction cycles
At the end of sampling period, the nonlinearity of the converter system is approximated by a linear model around the last predicted and corrected estimate

38
The EKF Algorithm
Initialization and
Prediction Cycle
where is the jacobian matrix of
Correction CycleA new measurement is obtained
where is the jacobian matrix of
incrementsPrediction and correction repeat with corrected estimates used to predict new estimates

39
0 0.01 0.02 0.03 0.04 0.05
0
100
200
300
400Observer 1
time (s)
Resid
ual r
1 ey1
0 0.01 0.02 0.03 0.04 0.05
-50
0
50
100
150
time (s)
Resid
ual r
1 ey2
0 0.01 0.02 0.03 0.04 0.05-100
0
100
200
300Observer 2
time (s)
Resid
ual r
2 ey1
0 0.01 0.02 0.03 0.04 0.05-4
-2
0
2
4
time (s)
Resid
ual r
2 ey2
Residuals Generated by the Bank of EKF
Instant of fault
Standardized residuals with fault on sensor 1 occurring at 0.03s

40
0 0.01 0.02 0.03 0.04 0.05-4
-2
0
2
4Observer 1
time (s)
Resid
ual r 1 e
y1
0 0.01 0.02 0.03 0.04 0.05
0
500
1000
1500
2000
2500
time (s)
Resid
ual r 1 e
y2
0 0.01 0.02 0.03 0.04 0.05
0
500
1000
1500
2000
2500Observer 2
time (s)
Resid
ual r 2 e
y1
0 0.01 0.02 0.03 0.04 0.05
0
500
1000
1500
2000
2500
time (s)
Resid
ual r 2 e
y2
Standardized residuals with fault on sensor 2 occurring at 0.03s
Instant of fault
Residuals Generated by the Bank of EKF
41
Residuals Generated by the Bank of EKF
Advantage of Kalman Filtering
independent residuals
with white Gaussian, zero-mean and unit-covariance characteristics in case of faultless operation
with altered statistical characteristics in case of sensor faults
Statistical change detection approaches

42
Residual Evaluation using Generalized Likelihood Ratio Test

43
Residuals Evaluation Approaches
Statistical data processing
Correlation
Pattern recognition
Fuzzy logic
Fixed threshold
Adaptive threshold Stochastic envirmonent
Likelihood ratio tests
Generalized Likelihood Ratio (GLR) Test

44
Residuals Evaluation using GLR Test
sensor is faultless residuals are Gaussain
with and
sensor is faulty is altered into and
into
Statistical Hypothesis Testing ProblemHo and H1

45
Statistical Hypothesis Testing ProblemHo and H1
Residuals Evaluation using GLR Test
Maximizing the likelihhod ratio
is the Maximum Likelihood Estimate (MLE) of is the MLE of
ooy
y
y Hep
HepeL
i
i
i ,ˆ;
,ˆ;ln
11

46
At every time step t
Apply the GLR statistic on the recent W residual values
Generate a detection function for each residual
Is residual variance known?
Evaluate for all using
2
)(
2
kxk
kGLR tt
Evaluate for all using
2
)(
)(1ln
2 k
kxkkGLR
t
tt
Is ?Decide H1
(fault)Decide H0
(No fault)
Yes No
Yes No
GLR Algorithm

47
Detection Function Generated by GLR Test
Detection function with fault on sensor 1
0 0.01 0.02 0.03 0.04 0.05
0
100
200
300
Residual r1 e
y1
0 0.01 0.02 0.03 0.04 0.05-5
0
5
Residual r2 e
y2
0 0.01 0.02 0.03 0.04 0.050
10
20
30
GLRt for r
1 e
y1
0 0.01 0.02 0.03 0.04 0.050
10
20
GLRt for r
2 e
y2
0 0.01 0.02 0.03 0.04 0.050
10
20
30
time (s)
GLRt for r
1 e
y1
0 0.01 0.02 0.03 0.04 0.050
10
20
time (s)
GLRt for r
2 e
y2
instant of fault
unknown
known known
unknown

48
Detection Function Generated by GLR Test
Detection function with fault on sensor 2
0 0.01 0.02 0.03 0.04 0.05-5
0
5
Residual r1 e
y1
0 0.01 0.02 0.03 0.04 0.050
2
4
GLRt for r
1 e
y1
0 0.01 0.02 0.03 0.04 0.050
20
40
GLRt for r
2 e
y2
0 0.01 0.02 0.03 0.04 0.050
1
2
3
time (s)
GLRt for r
1 e
y1
0 0.01 0.02 0.03 0.04 0.050
20
40
time (s)
GLRt for r
2 e
y2
0 0.01 0.02 0.03 0.04 0.05
0
1000
2000
Residual r2 e
y2
instant of fault
unknown
known
unknown
known

49
Tuning using Receiver Operating Characteristic Curve

50
false positives rate (tpr)
true
pos
itive
s ra
te (f
pr)
(0, 0)
(1, 1)
as increase
0 1
1
+ optimal
ROC Analysis
An evaluation tool to measure the performance of the residual-based GLR test.

51
Three ROC Plots: W = 30
For each W, is varied from 0 to
For each , a test set of 1000 simulations is used
Healthy and faulty trials
During faulty trials, different fault amplitudes were injected
At the end of every trial, the detection function is generated using and compared the corresponding
At the end of the 1000 trials, the tpr and fpr are calculated and the corresponding point is located on the ROC curve.
ROC Analysis
W = 50 W = 70

52
-1 0 1 2 3 4 5 6 7
x 10-3
0.97
0.98
0.99
1
28.62
28.57
28.5628.55
28.5428.53
28.5228.51
28.5
28.49
28.48
28.47
28.46
28.45
28.44
28.43
28.42
28.41
28.4
28.39
28.38
28.37
28.36
28.35
28.34
28.33
28.32
28.31
28.3
28.29
28.28
28.27
28.26
28.25
28.24
28.23
28.22
28.21
28.2
28.19
28.18
28.17
28.16
28.14
28.13
28.11
28.1
28.0828.05 21.56 21.24 20.31 19.8 17.88 17.63 17.39 16.35 14.9 14.8 14.49 14.48 14.42 14.41 14.22 14.19 14 13.89 13.81 13.48 13.43 13.41 13.09 13.05 13.01 12.95 12.71 12.06 12.01 11.97 11.96 11.91 11.75 11.73 11.65 11.56 11.51 11.46 11.45 11.44 11.34 11.29 11.24 11.2 11.18 11.17 11.01 10.98 10.96 10.89 10.87 10.75 10.72 10.61 10.57 10.54 10.49 10.34 10.31 10.28 10.13 10.05 10 9.93 9.91 9.86 9.85 9.84 9.8 9.6 9.58 9.56 9.55 9.3 9.22 9.2 9.14 9.04 9.03 9.01 8.99 8.98 8.97 8.94 8.89 8.88 8.79 8.78 8.73 8.71 8.63 8.57 8.55 8.54 8.52 8.51 8.48 8.46 8.44 8.38 8.35 8.34 8.33 8.31 8.29 8.22 8.2 8.16 8.15 8.13 8.12 8.02 8.01 8 7.95 7.91 7.85 7.82 7.78 7.76 7.73 7.71 7.7 7.69 7.68 7.63 7.61 7.6 7.56 7.53 7.48 7.47 7.37 7.32 7.27 7.21 7.19 7.16 7.14 7.06 7.05 7.04 7.03 7 6.99 6.97 6.95 6.93 6.91 6.9 6.88 6.86 6.84 6.83 6.81 6.79 6.78 6.76 6.74 6.72 6.71 6.7 6.69 6.68 6.66 6.64 6.62 6.61 6.59 6.58 6.57 6.56 6.55 6.54 6.52 6.51 6.49 6.47 6.46 6.43 6.38 6.36 6.35 6.33 6.31 6.3 6.28 6.27 6.25 6.23 6.21 6.2 6.19 6.18 6.17 6.16 6.15 6.14 6.13 6.09 6.07 6.05 6.04 6.01 5.99 5.98 5.97 5.96 5.95 5.94 5.93 5.92 5.9 5.89 5.87 5.84 5.8 5.77 5.75 5.73 5.71 5.7 5.69 5.68 5.66 5.65 5.64 5.61 5.6 5.59 5.58 5.57 5.56 5.55 5.54 5.52 5.5 5.49 5.47 5.46 5.45 5.44 5.43 5.42 5.41 5.36 5.35 5.34 5.32 5.31 5.3 5.29 5.28 5.27 5.25 5.24 5.21 5.18 5.17 5.14 5.12 5.11 5.1 5.08 5.06 5.05 5.03 5.02 5.01 5 4.96 4.95 4.92 4.87 4.86 4.854.84 4.83 4.82 4.78 4.76 4.75 4.74 4.73 4.71 4.7 4.68 4.63 4.61 4.59 4.56 4.55 4.54 4.53 4.52 4.51 4.5 4.48 4.46 4.43 4.42 4.41 4.4 4.37 4.35 4.31 4.29 4.28 4.26 4.25 4.24 4.21 4.19 4.18 4.16 4.15 4.14 4.13 4.12 4.1 4.09 4.08 4.07 4.06 4.05 4.04 4.03 4.02 4 3.98 3.97 3.96 3.95 3.94 3.93 3.92 3.91 3.9 3.88 3.86 3.83 3.82 3.81 3.8 3.78 3.77 3.76 3.72 3.71 3.7 3.69 3.65 3.64 3.63 3.62 3.61 3.6 3.56 3.55 3.54 3.53 3.51 3.5 3.49 3.47 3.46 3.43 3.4 3.38 3.36 3.35 3.31 3.3 3.27 3.25 3.23 3.22 3.16 3.12 3.11 3.1 3.09 3.08 3.07 3.06 3.05 3.04 3.03 3.02 3.01 3 2.99 2.97 2.96 2.95 2.94 2.93 2.92 2.91 2.9 2.89 2.88 2.87 2.86 2.85 2.84 2.82 2.81 2.79 2.78 2.73 2.72 2.68 2.65 2.63 2.62 2.6 2.59 2.58 2.57 2.54 2.53 2.51 2.5 2.48 2.46 2.45 2.44 2.43 2.41 2.4 2.39 2.37 2.34 2.32 2.29 2.26 2.24 2.23 2.21 2.2 2.19 2.18 2.17 2.16 2.14 2.13 2.11 2.09 2.08 2.05 2 1.99 1.97 1.96 1.94 1.93 1.92 1.9 1.89 1.88 1.84 1.79 1.77 1.76 1.65 1.64 1.62 1.61 1.55 1.54 1.53 1.52 1.51 1.4 1.39 1.38 1.37 1.3 1.27 1.25 1.22 1.2 1.16 1.12 1
0 5 10 15 20
x 10-3
0.94
0.96
0.98
1
X: 0Y: 1
ROC curve (Observer 1/ Residual 1) r1e
y1
false positive rate
true
posit
ive ra
te
X: 0.002894Y: 1 X: 0.0152
Y: 0.9942
W=30
W=50
W=70
optimal point (0,1)
-1 0 1 2 3 4 5 6 7
x 10-3
0
0.2
0.4
0.6
0.8
1
35.3535.34
35.33
35.3235.31 34.83 31.43 30.66 29.71
28.99 28.97 28.39 28.35 27.96 27.95 27.71 27.14 26.71 26.68 26.66 26.3 25.62 25.53 25.17 24.69 24.66 24.42 24.2 24.01 24 23.58 23.34 23.23 23.18 22.73 22.69 22.59 22.49 22.38 22.36 22.28 21.87 21.75 21.72 21.59 21.4 21.2 20.87 20.59 20.49 20.28 20.01 19.8 19.78 19.66 19.65 19.61 19.52 19.48 19.47 19.24 19.01 19 18.92 18.91 18.69 18.66 18.48 18.33 18.27 18.13 18.06 18.01 18 17.98 17.92 17.75 17.63 17.49 17.45 17.38 17.33 17.28 17.25 17.24 17.21 17.16 17.12 17.08 16.75 16.69 16.68 16.61 16.55 16.42 16.39 16.29 16.22 16.15 16.13 16.12 16.01 15.9 15.85 15.83 15.82 15.8 15.72 15.69 15.59 15.58 15.57 15.48 15.39 15.38 15.27 15.24 15.2 15.13 15.09 15.05 15.01 14.93 14.89 14.85 14.78 14.76 14.64 14.63 14.48 14.41 14.4 14.36 14.34 14.31 14.29 14.15 14.13 14.03 14.02 14.01 13.98 13.9 13.82 13.81 13.78 13.77 13.74 13.64 13.59 13.55 13.54 13.52 13.39 13.36 13.31 13.3 13.27 13.23 13.21 13.03 13.02 12.98 12.97 12.96 12.93 12.91 12.88 12.83 12.77 12.65 12.64 12.61 12.59 12.58 12.42 12.4 12.32 12.29 12.28 12.24 12.22 12.17 12.08 12.05 12.01 11.97 11.93 11.92 11.89 11.88 11.85 11.83 11.82 11.79 11.75 11.74 11.65 11.61 11.55 11.47 11.42 11.41 11.38 11.35 11.33 11.31 11.3 11.21 11.2 11.17 11.16 11.14 11.13 11.1 11.08 11.07 11.04 11.03 11 10.98 10.96 10.93 10.92 10.91 10.88 10.85 10.84 10.82 10.81 10.73 10.7 10.64 10.63 10.62 10.59 10.56 10.54 10.51 10.49 10.46 10.42 10.4 10.37 10.36 10.35 10.32 10.3 10.23 10.19 10.18 10.17 10.11 10.1 10.08 10.05 10.04 10.03 10.02 10 9.99 9.97 9.96 9.93 9.82 9.75 9.74 9.7 9.68 9.62 9.58 9.56 9.55 9.5 9.49 9.46 9.41 9.4 9.31 9.29 9.28 9.27 9.25 9.24 9.22 9.2 9.19 9.16 9.15 9.12 9.11 9.05 9.01 8.97 8.94 8.92 8.91 8.85 8.84 8.8 8.79 8.78 8.73 8.72 8.68 8.67 8.63 8.62 8.6 8.59 8.58 8.56 8.55 8.52 8.5 8.48
-0.005 0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.040.6
0.7
0.8
0.9
1
X: 0Y: 1
ROC curve (Observer 2/ Residual 2) r2e
y2
false positive rate
true
posit
ive ra
te
X: 0.01333Y: 1
X: 0.0304Y: 1
W=30
W=50
W=70
optimal point (0,1)
ROC Curve for Residual r1ey1 ROC Curve for Residual r2ey2
false positive rate false positive rate
true
pos
itive
rate
true
pos
itive
rate
optimal point for =28.05 and =70 optimal point for =35.31 and =70

53
Conclusion and Future Perspectives

54
Proposed Fault Diagnosis Algorithm
Output variables
Input variables
Power Converter System
Bank of Kalman Filters
GLR Test
Residuals
Decision
Fault/No fault
Tuning of W
Tuning of
ROC curve Detection function
Residual Generation
Residual Evaluation
55
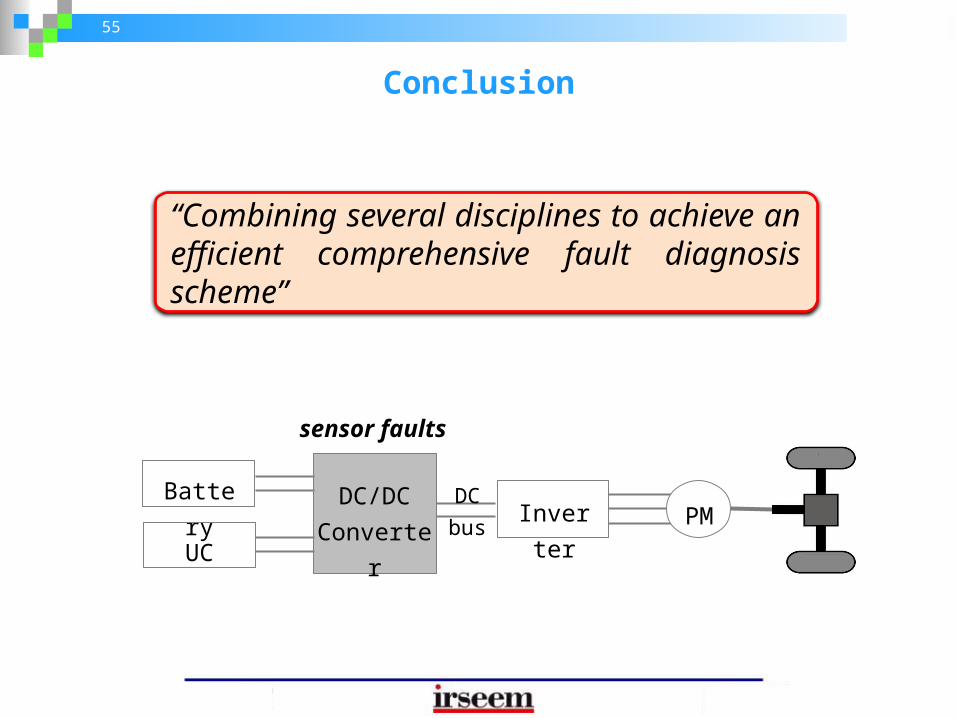
Conclusion
“Combining several disciplines to achieve an efficient comprehensive fault diagnosis scheme”
BatteryPM
UC
DC/DC Converter
InverterDC bus
sensor faults

56
Conclusion
GLR Test
+ +
Model-based Residual
generation
Power Converter Process
ROC Curves

57
« Power electronics interface configurations for hybrid energy storage in hybrid electric vehicles »
17th IEEE MELECON’14 Mediterranean Electrotechnical Conference
« Modeling, design and fault analysis of bidirectional DC-DC converter for hybrid electric vehicles »
23rd IEEE ISIE’14 International Symposium on Industrial Electronics
« Study on power converters used in hybrid vehicles with monitoring and diagnostics techniques »
17th IEEE MELECON’14 Mediterranean Electrotechnical Conference
« Condition Monitoring of Bidirectional DC-DC Converter for Hybrid Electric Vehicles »
22nd MED’14 Mediterranean Conference on Control & Automation

58
« A Sensor fault diagnosis scheme for a DC/DC converterused in hybrid electric vehicles »
9th IFAC Symposium on Fault Detection, Supervision and Safety for Technical Processes SAFEPROCESS'15
59
Future Perspectives
Future work will utilize the proposed model-based approach to detect/diagnose component faults in the converter such as
open-circuited transistor short-circuited diode degraded capacitor

60
Thank you





























