Embed Size (px)
Citation preview

NASA/TM-2000-209015
A Real-Time Method for EstimatingViscous Forebody Drag Coefficients
Stephen A. Whitmore
and Marco HurtadoNASA Dryden Flight Research CenterEdwards, California
Jose RiveraUniversity of South FloridaTampa, Florida
Jonathan W. NaughtonUniversity of WyomingLaramie, Wyoming
January 2000

The NASA STI Program Office…in Profile
Since its founding, NASA has been dedicatedto the advancement of aeronautics and space science. The NASA Scientific and Technical Information (STI) Program Office plays a keypart in helping NASA maintain thisimportant role.
The NASA STI Program Office is operated byLangley Research Center, the lead center forNASA’s scientific and technical information.The NASA STI Program Office provides access to the NASA STI Database, the largest collectionof aeronautical and space science STI in theworld. The Program Office is also NASA’s institutional mechanism for disseminating theresults of its research and development activities. These results are published by NASA in theNASA STI Report Series, which includes the following report types:
• TECHNICAL PUBLICATION. Reports of completed research or a major significantphase of research that present the results of NASA programs and include extensive dataor theoretical analysis. Includes compilations of significant scientific and technical data and information deemed to be of continuing reference value. NASA’s counterpart of peer-reviewed formal professional papers but has less stringent limitations on manuscriptlength and extent of graphic presentations.
• TECHNICAL MEMORANDUM. Scientificand technical findings that are preliminary orof specialized interest, e.g., quick releasereports, working papers, and bibliographiesthat contain minimal annotation. Does notcontain extensive analysis.
• CONTRACTOR REPORT. Scientific and technical findings by NASA-sponsored contractors and grantees.
• CONFERENCE PUBLICATION. Collected papers from scientific andtechnical conferences, symposia, seminars,or other meetings sponsored or cosponsoredby NASA.
• SPECIAL PUBLICATION. Scientific,technical, or historical information fromNASA programs, projects, and mission,often concerned with subjects havingsubstantial public interest.
• TECHNICAL TRANSLATION. English- language translations of foreign scientific and technical material pertinent toNASA’s mission.
Specialized services that complement the STIProgram Office’s diverse offerings include creating custom thesauri, building customizeddatabases, organizing and publishing researchresults…even providing videos.
For more information about the NASA STIProgram Office, see the following:
• Access the NASA STI Program Home Pageat
http://www.sti.nasa.gov
• E-mail your question via the Internet to [email protected]
• Fax your question to the NASA Access HelpDesk at (301) 621-0134
• Telephone the NASA Access Help Desk at(301) 621-0390
• Write to:NASA Access Help DeskNASA Center for AeroSpace Information7121 Standard DriveHanover, MD 21076-1320

NASA/TM-2000-209015
A Real-Time Method for EstimatingViscous Forebody Drag Coefficients
Stephen A. Whitmore
and Marco HurtadoNASA Dryden Flight Research CenterEdwards, California
Jose RiveraUniversity of South FloridaTampa, Florida
Jonathan W. NaughtonUniversity of WyomingLaramie, Wyoming
January 2000
National Aeronautics andSpace Administration
Dryden Flight Research CenterEdwards, California 93523-0273

NOTICE
Use of trade names or names of manufacturers in this document does not constitute an official endorsementof such products or manufacturers, either expressed or implied, by the National Aeronautics andSpace Administration.
Available from the following:
NASA Center for AeroSpace Information (CASI) National Technical Information Service (NTIS)7121 Standard Drive 5285 Port Royal RoadHanover, MD 21076-1320 Springfield, VA 22161-2171(301) 621-0390 (703) 487-4650

A REAL-TIME METHOD FOR ESTIMATINGVISCOUS FOREBODY DRAG COEFFICIENTS
Stephen A. Whitmore* and Marco Hurtado†
NASA Dryden Flight Research CenterEdwards, California
Jose Rivera‡
University of South FloridaTampa, Florida
Jonathan W. Naughton§
University of WyomingLaramie, Wyoming
Abstract
This paper develops a real-time method based on thelaw of the wake for estimating forebody skin-frictioncoefficients. The incompressible law-of-the-wakeequations are numerically integrated across theboundary layer depth to develop an engineering modelthat relates longitudinally averaged skin-frictioncoefficients to local boundary layer thickness. Solutionsapplicable to smooth surfaces with pressure gradientsand rough surfaces with negligible pressure gradients arepresented. Model accuracy is evaluated by comparingmodel predictions with previously measured flight data.This integral law procedure is beneficial in that skin-friction coefficients can be indirectly evaluated in real-time using a single boundary layer height measurement.In this concept a reference pitot probe is inserted into theflow, well above the anticipated maximum thickness ofthe local boundary layer. Another probe isservomechanism-driven and floats within the boundarylayer. A controller regulates the position of the floatingprobe. The measured servomechanism position of thissecond probe provides an indirect measurement of bothlocal and longitudinally averaged skin friction.
1American Institute of Aero
*Aerospace Engineer, Associate Fellow, AIAA.†Co-operative Education Engineering Student Intern,
Aerodynamics Branch.‡Engineering Student Intern, Department of Mechanical
Engineering.§Professor, Department of Mechanical Engineering, Member
AIAA.Copyright 2000 by the American Institute of Aeronautics and
Astronautics, Inc. No copyright is asserted in the United States underTitle 17, U.S. Code. The U.S. Government has a royalty-free licenseto exercise all rights under the copyright claimed herein forGovernmental purposes. All other rights are reserved by the copyrightowner.
Simulation results showing the performance of thecontrol law for a noisy boundary layer are thenpresented.
Nomenclature
control equation coefficient
B law of the wake bias parameter
Bk control equation coefficient
base drag coefficient
total drag coefficient
CF longitudinally averaged skin friction
coefficient,
Ck control equation coefficient
cf local skin friction coefficient
local skin friction coefficient calculated by the nonlinear solution method
local skin friction coefficient calculated by the closed-form solution method
estimated skin friction coefficient
C0 curve fit bias coefficient
C1 curve fit slope coefficient
dx longitudinal integration variable
dy normal integration variable
rough surface, skin friction ratio parameter,
F law-of-the-wake velocity defect function, m/sec
Ak
CDbase
CDtotal
CF1x--- c f xd
0
x∫=
c f nonlinear
c f closed form
CF
Gxκ s-----
Gxκ s-----
c f
CF-------=
nautics and Astronautics

K gain parameter
k discrete time index
kPa kilopascals
Medge Mach number at edge of boundary layer
m boundary layer velocity profile exponent
n control gain parameter
local dynamic pressure within boundary layer, kPa
dynamic pressure at edge of boundary layer, kPa
steady-state dynamic pressure ratio
promeasured dynamic pressure, kPa
reference dynamic pressure, kPa
steady dynamic pressure in steady boundary layer
unsteady dynamic pressure in intermittent boundary layer
Rex Reynolds number based on longitudinal coordinate
transition Reynolds number
t time
U time-averaged longitudinal velocity in boundary layer, m/sec
Ue velocity at edge of boundary layer, m/sec
u longitudinal velocity in boundary layer, m/sec
steady-state velocity ratio
u’ unsteady perturbation of longitudinal velocity, m/sec
u+ nondimensional boundary layer velocity,
V time-averaged normal velocity in boundary layer, m/sec
v normal velocity in boundary layer, m/sec
v’ unsteady perturbation of normal velocity, m/sec
W time-averaged lateral velocity in boundary layer, m/sec
w longitudinal lateral in boundary layer, m/sec
w’ unsteady perturbation of lateral velocity, m/sec
x longitudinal coordinate, cm
y normal boundary layer coordinate, cm
yfinal steady-state probe position, cm
yk current probe position, cm
yk+1 commanded probe position, cm
yk–1 old probe position, cm
ylam normal displacement within laminar sublayer, cm
probe position in boundary layer, cm
ytrans point of transition between laminar and turbulent layers
y+ nondimensional normal boundary layer
coordinate,
normal point of transition between laminar and turbulent layers
z lateral boundary layer coordinate, cm
angle of attack, deg.
Clauser nondimensional pressure gradient parameter
intermittency factor
differential pressure, kPa
pressure error feedback, kPa
frame interval, sec
boundary layer thickness, cm
boundary layer thickness, noisy simulation, cm
estimate of boundary layer thickness, cm
boundary layer displacement thickness, cm
laminar contribution to boundary layer displacement thickness, cm
turbulent contribution to boundary layer displacement thickness, cm
controller damping ratio
uniformly distributed random noise function
q
qe
qqe-----
qmeas
qref
qsteady
qunsteady
Rextr
uUe------
final
u+ u y( )
Ue
c f
2-----
-----------------=
yprobe
y+ y
x--Rex
c f
2-----=
y+
trans
α
β
γ
∆p
∆q
∆t
δ
δnoisy
δest
δ*
δlam*
δturb*
ζ
η t( )
2American Institute of Aeronautics and Astronautics

boundary layer momentum thickness, cm
laminar contribution to boundary layer momentum thickness, cm
turbulent contribution to boundary layer momentum thickness, cm
law of the wake velocity distribution slope parameter
surface roughness height, cm
non-dimensional surface roughness,
dummy variable of integration
effective normal height of laminar sub-layer, cm
mean deviation in CF
wake parameter
standard deviation in CF
controller natural frequency, sec–1
longitudinal pressure gradient, kPa/m
longitudinal momentum thickness gradient
Mathematical Operators
first derivative with respect to time
second derivative with respect to time
Introduction
Lifting body and wing body designs currentlyadvocated for transatmospheric reusable launch vehicles(RLV) or for crew return from the space station arederived from variations on the original lifting bodyconcept.1 For a variety of reasons, these designs havelarge base areas relative to the vehicle size whencompared to previous hypersonic designs. For example,on the X-33 and VentureStar™ (Lockheed Martin,Bethesda, Maryland) configurations the large base areasare required to accommodate aerospike engines.Conversely, the X-38—derived from the original X-24Amold lines—has a large blunt base area resulting fromthe upper body flap required to trim the vehicle. In bothof the above cases, the base area flow is highly separatedresulting in large negative base pressure coefficients.Because of the large base-to-wetted-area ratios of thesevehicles, the base drag makes up the majority of theoverall vehicle drag. Thus the base drag has a largeimpact on critical vehicle performance parameters suchas maximum payload and maximum cross-range. Any
decrease in base drag has the potential to significantlyimprove the overall vehicle performance. An increase inthe vehicle lift-to-drag ratio would allow for a much lesssevere glide slope during the terminal phase of thevehicle reentry. Reduction in glide-slope steepnesswould in turn make the terminal area energymanagement task considerably easier.
Early Work Points to a Possible Solution
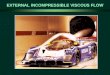
There is a feasible means for decreasing base drag.For blunt-based objects with base areas that featureheavily separated flows, a clear relationship isdemonstrated between the base drag and the viscousforebody drag.2, 3 Figure 1 shows the base dragcoefficient plotted against the viscous forebody dragcoefficient. The viscous forebody drag coefficient isdefined as the sum of all viscosity-induced dragcomponents on the vehicle forebody. These componentsinclude skin friction, forebody separation, forebodywakes, and parasite drag due to protuberances. Thetrend presented in figure 1 shows that as the forebodydrag is increased the base drag of the vehicle generallytends to decrease. This base-drag reduction is a result ofboundary layer effects at the base of the vehicle. Theshear layer caused by the free-stream flow rubbingagainst the dead, separated air in the base region acts asa “jet pump”2 and serves to reduce the pressurecoefficient in the base areas. The surface boundary layeracts as an insulator between the external flow and thedead air at the base. As the viscous forebody drag isincreased, the boundary layer thickness at the aft end ofthe forebody increases—reducing the effectiveness ofthe pumping mechanism—and the base drag canpotentially be reduced.
Flight Tests on SR-71 LASRE Experiment
Recent work performed on the Linear AerospikeSR-71 Experiment (LASRE) flight program hasdemonstrated that the trend presented in figure 1 can bepractically applied to reduce the base drag of a largeprojectile.4 In the LASRE experiment, a portion of theforebody of the test model was roughened to increasethe forebody drag. A decrease in base drag was observedat all Mach numbers—subsonic, transonic andsupersonic.
Trade-Off Between Forebody Drag and Base Drag
More significantly, figure 1 data show that projectileswith a base drag coefficient greater than 0.30(referenced to the base area) must necessarily lie on therelatively steep segment of the curve presented. In this
θ
θlam*
θturb*
κ
κ s
κ+
λ
λ trans
µ
Π
σ
ωn
∂p∂x------
∂θ∂x------
˙( )˙( )
3American Institute of Aeronautics and Astronautics

region a small change in the forebody friction dragshould result in a relatively large change in the basedrag. Conceptually, if the added change in forebody skindrag is optimized with respect to the base drag, then itmay be possible to reduce the overall drag of theconfiguration. That is, based on Hoerner’s data, anoptimal drag bucket should exist. Figure 2 shows thisoptimal drag region. Here the base drag and the totalvehicle drag are plotted against the viscous forebodydrag including measured data for several hypersoniclifting-body and wing-body configurations:3 These arethe X-15, M2-F1, M2-F2, Shuttle, HL-10, X-24A,X-24B, and the SR-71 LASRE. The simple model infigure 2 is presented only as an illustration of the drag-bucket concept. Clearly, the forebody pressure profileand the presence of induced drag and localizedinterference or flow separation drag will likely alter theshape of the optimal curve presented in figure 2. Thechallenge is to modify the forebody drag coefficient toproduce the minimum overall vehicle drag in a real-world configuration.
On the Need for Real-Time Forebody Viscous Drag Measurements
An intriguing concept for implementing the dragoptimization described above utilizes recent advances inmicroelectromechanical systems (MEMS)5 technology.In this concept MEMS technology is used to adaptivelyvary the surface roughness in order to track the optimalskin friction. This design uses a “fish-scale” pattern ofmicroscale actuators distributed along the vehicle skin.The position of these microscale surface panels iscommanded in real-time to modify the local surfaceroughness and increase or decrease the total forebodyviscous drag coefficient, as required, to achieve theoverall drag minimum. This optimization processrequires that the viscous forebody drag coefficient besensed and available for feedback to the MEMScontroller in real-time. To be practical for theoptimization problem, the forebody drag measurementdevice must be self-contained; that is, the measurementsystem must be installed entirely onboard the vehicle.Additionally, the device must be able to adapt to widelyvarying boundary layer thickness.
None of the existing methods for sensing the surfaceskin friction are easily adaptable to the aboveoptimization problem. This paper briefly examines whythere are limitations with the current skin-frictionmeasurement techniques and then proposes a newmethod for sensing the viscous forebody dragcoefficient based on the law of the wake.6 Theengineering model developed for this new method
allows longitudinally averaged skin-frictionmeasurements to be made in a direct manner with asingle measurement of the boundary layer thicknessnear the aft end of the forebody. For simplicity, allanalyses and data presented assume incompressible flowrelationships. It is simply a matter of detail to extendthese discussions to account for the effects ofcompressible flow.
Note that use of trade names or names ofmanufacturers in this document does not constitute anofficial endorsement of such products or manufacturers,either expressed or implied, by the National Aeronauticsand Space Administration.
Background
This section briefly discusses existing methods forsensing surface skin friction and presents the reasonswhy these methods are unsatisfactory for our currentmeasurement problem. Current methods for measuringsurface skin friction can be grouped into two classes:direct measurements and indirect measurements.
Direct Skin Friction Measurements
The direct measurement methods sense surfaceshearing stress by using small floating balances orthrough the use of surface-imaging interferometry. Thebalance methods are generally self-contained and havebeen successfully applied to flight vehicles.7, 8
Unfortunately, experience has demonstrated thatsurface-mount skin-friction gauges are also susceptibleto damage and thermal shifts, and they require frequentre-calibration to achieve accurate results.
Oil-film interferometry has been used to produce veryaccurate localized skin-friction measurements;9
however, these techniques are usually applied only in alaboratory setting. Because they require remote opticalimaging of the flow field, interferometry methods areinherently not self-contained and are not easily adaptedfor use on flying vehicles. The rapid development offiber-optic sensors may provide a practical method toovercome this problem. Developing these opticallysensed skin-shear sensors to be rugged and reliable willbe a challenge for some time yet to come.
Indirect Skin Friction Measurements
Two of the most common indirect methods used tocompute skin-friction coefficients on flight vehicles arePreston tubes and boundary-layer rakes. Both types ofsensors are reasonably easy to fabricate and install, andoffer the advantage of being self-contained, reliable, and
4American Institute of Aeronautics and Astronautics

rugged. Unfortunately, both designs have limitationsthat restrict their real-time applicability and make themgenerally unsuitable for the drag optimization problem.
Preston Tubes10, 11 offer a simple hardware solutionwhere a single pitot tube is located as close to thesurface as possible. By assuming a log-law velocityprofile,12 and using measurements of the local wallstatic and surface pitot pressure, the local skin-frictioncoefficient can be calculated. These methods have beensuccessfully applied to a large number of flight andwind tunnel tests. However, the drag optimizationproblem requires that the entire viscous forebody dragcoefficient—which includes the effects of skin friction,forebody separation, forebody wakes, and parasite dragdue to protuberances—must be sensed. Unfortunately,the log-law velocity distribution is not valid in the outerlayers of the boundary layer or within the wake region.Thus it is believed that Preston tubes will not be able tocompletely capture the range of required forebody dragmeasurements. It is possible that the Preston tubeanalyses can be modified to allow for the effects of theouter wake region; however that analysis is beyond thescope of this paper.
Boundary-layer rakes consist of an assembly withmultiple pitot probes placed in a normal line away fromthe skin of the vehicle. Boundary-layer rakes sense thelocal dynamic pressure profile within the boundary layerand use these data to compute the velocity distribution.This velocity distribution is numerically integrated toproduce a measurement of the local momentumthickness.12
In order to obtain accurate momentum thicknessmeasurements using a boundary-layer rake, it is criticalthat the rake be designed to obtain adequate normalresolution within the critical shearing layers near thesurface where the momentum defect distributionreaches a peak value. This “hump” in the momentumthickness curve occurs near the interface of thelaminar sublayer with the outer turbulent log-lawvelocity distribution layer. This resolution requirementmeans that a large number of measurements, typically6–10 probes, must be made in order to sense thevelocity profile with a sufficient amount of resolution.This large amount of data must be sampled andintegrated in real time. Additionally, the frame-by-frameresults must be heavily post-processed to eliminate theeffects of local boundary noise. While these limitationscertainly do not preclude the use of boundary-layerrakes for real-time forebody drag measurements, it isbelieved that these results can be achieved by a morestraightforward measurement technique.
A New Measurement Approach
The real-time measurement technique beingdeveloped in this paper exploits design features of bothPreston tubes and boundary-layer rakes. In thisapproach a reference pitot probe is inserted into theflow, well above the maximum anticipated thickness ofthe local boundary layer. Another pitot probe is mountedon a servomechanism which moves in a directionnormal to the surface. A controller regulates the positionof the servomechanism based on the measured pressuredifference between the moving pitot probe and thereference pitot probe. This design concept is picturedschematically in figure 3. The design will be tailored totypically allow the probe to track the area within theouter wake region near the edge of the boundary layer.A position sensor on the probe gives a measure of thelocal boundary layer thickness. This probe position isrelated to the forebody skin-friction coefficient using alaw-of-wake analysis. This analysis is presented in thenext section. The crux of this analysis is thedevelopment of an integral relationship that describesthe skin-friction coefficient in terms of a localmeasurement of the boundary layer thickness.
Integral Law of the Wake Analysis
The key to the floating-probe concept described in theprevious section is Coles’ law of the wake.6 The law ofthe wake relates the outer (turbulent) boundary-layervariables to the nondimensionalized boundary-layercoordinates
(1)
where,
(2)
is the local boundary-layer thickness, is theslope parameter, B is a bias parameter, is the wakeparameter,13 and is the local viscous forebody dragcoefficient. The currently accepted “best value” for isapproximately 0.41. The bias parameter, B, varies withthe level of surface roughness and for a smooth plate hasa numerical value of approximately 5.0. The wakeparameter is proportional to the local longitudinalpressure gradient, and for a zero-gradient flow conditionthis wake parameter has a numerical value ofapproximately 0.55. The roughness-dependent bias term
u+ 1
κ--- y
+[ ] 2Π 2 π2--- y
δ--sin+ln B+=
u+ u y( )
Ue
c f
2-----
-----------------, y+ y
x--Rex
c f
2-----= =
δ κΠ
CFκ
5American Institute of Aeronautics and Astronautics

can be eliminated from equation 1 by expressing the lawof the wake in terms of the local velocity defect.
(3)
General Solution Method for Local Skin-Friction Coefficient
As developed in Appendix A, equation 3 is integratedacross the depth of the boundary layer, including thelaminar sublayer, to relate the momentum anddisplacement thickness to the local boundary thicknessand the local pressure gradient. The resultingrelationships are (1) momentum thickness and(2) displacement thickness.
(1) Momentum thickness:
(4(a))
(2) Displacement thickness:
(4(b))
In equations 4(a) and 4(b), is the Clauserparameter,13 and is related to the local pressure gradientby
(5)
Clearly negative values of correspond to favorablepressure gradients and positive values of correspondto adverse pressure gradients. A pressure gradient with
is considered to be a weak, and a pressure
gradients with is considered to be strong.White14 develops a similar set of integral relationshipsfor the momentum and displacement thickness, but doesnot include the effect of the laminar sublayer.
Closure is added to the problem by applying thecorrelation equation developed by White,14
(6)
Equations 4, 5, and 6 can be used to solve for theentire state of the local boundary in terms of thenormalized boundary-layer thickness, Reynoldsnumber, and the Clauser pressure gradient parameter.Parameters which are estimated include the local skin-friction coefficient, momentum thickness, displacementthickness, and the boundary-layer shape parameter( ). This system of equations is extremelynonlinear but is reasonably well-behaved and isnumerically solved using a simple substitution iterationprocedure. Unfortunately, the correlation of equation 6was developed from smooth surface data only. Thus thissolution procedure should be applied to smooth surfacesonly. For the remainder of this paper, this iterativesolution procedure will be referred to as the nonlinearmethod.
Zero Pressure Gradient Solution for LongitudinallyAveraged Skin-Friction Coefficient
If the local pressure gradient is small or negligible, then the longitudinally averaged forebody
viscous drag coefficient is directly related to the localmomentum thickness using the integral form of theVon Karman momentum equation
(7)
Substituting equation 7 into equation 4(a) andevaluating for , an expression for thelongitudinally averaged viscous drag coefficient interms of the local skin-friction coefficient is derived
(8(a))
1 u y( )Ue
-----------–c f
2-----
1κ--- 2Π 2
π2---
yδ--
yδ--ln–cos ≈
=
c f
2----- 4.878Π 2
π2---
yδ-- 2.439
yδ--ln–cos
δx-- c f
0.16425 2.66116 0.88881 β++[ ] –
10.4874 10.6227 β 2.13276 0.88881 β++ +[ ] c f
+ 55.9194 40.6563 0.88881 β+–
Rex------------------------------------------------------------------------------
+ c f 137.422– 162.4 β 32.6051 0.88881 β++ +[ ]
Rex-------------------------------------------------------------------------------------------------------------------------------
δ*
x-----
δx-- c f 0.16425 2.66116 0.88881 β++[ ][ ]=
55.9194 40.6563 0.88881 β+–Rex
------------------------------------------------------------------------------ ++
β
β δ*
c f-----
∂p∂x------
q------≡
ββ
β 0.1<
β 0.1>
c f0.3e 1.33δ* θ⁄–
log 10Rexθx---
1.74 0.31δ* θ⁄+-----------------------------------------------------------------=
δ* θ⁄
β 0∼( )
θx---
1x---
c f
2----- xd
0x∫
c f
2-----= =
β 0=
CFδx-- c f= 5.3464 24.998 c f–[ ]
1Rex--------- 35.12 213.342 c f–[ ]+
6American Institute of Aeronautics and Astronautics

In equation 8(a), is the longitudinally averagedviscous drag coefficient. Evaluating equation 1 at
gives an implicit formula for the local skin-friction coefficient in terms of the and Rex
(8(b))
As mentioned earlier, for a smooth surface .For rough surfaces, White14 has curve-fit thePrandtl-Schlicting sand grain roughness curve to obtainthe following formula
(9)
In equation 9, is the nondimensional surfaceroughness and is defined as
(10)
A surface is defined as “rough” when . For, the surface is said to be “hydraulically
smooth.” Equation 9 is valid for turbulent flowconditions that are smooth, transitionally rough (onlypart of the surface is rough), and fully rough (the entiresurface is rough). Collectively, equations 8, 9, and 10offer a nonlinear set of equations which can be used tosolve for the longitudinally averaged viscous dragcoefficient in terms of the local boundary-layerthickness, Reynolds number, and the surface roughnessratio. This set of equations is well-behaved and can besolved iteratively using a simple substitution method.Since the local skin-friction coefficient is computed byevaluating the law of the wake at the edge of theboundary layer for the remainder of this paper, thissolution method is referred to as the edge method.
Closed-Form Solution Method for Averaged Skin-Friction Coefficient
When the entire surface is rough (a fully rough flowregime), experimental observations show that the ratioof the local and averaged skin-friction coefficients is afunction of only the normalized surface roughness,( ). For a fully rough flat plate Mills,15 et. al. havedeveloped the following relationship for the skin-friction ratio
(11)
Equation 11 is valid over a Reynolds number rangefrom approximately 105 to 108. For large Reynoldsnumbers (Rex > 107) an approximate skin-friction ratiofor fully developed turbulent flow on a hydraulicallysmooth plate is derived by setting the roughness ratio toa very large value. Evaluating equation 11 at
, gives .
By substituting into equation 8(a) andsimplifying, the solution for the averaged viscous dragcoefficient are written in closed form
Equation 12 gives the relationship between the localboundary layer thickness and the averaged surface skin-friction coefficient. This simple result is importantbecause it requires only a single measurement of theboundary layer thickness and an estimate of theReynolds number and surface-roughness ratio todetermine the local momentum defect. When thepressure gradients are small, the local momentum defectis a good approximation of the averaged skin friction.Data to be presented in the Results and Discussion
CF
y δ=δ
2c f----- 2.439
c f
2-----
δx-- Rex 2Π+ln B+=
β 5.0=
B 5.0 2.439 1 0.30κ++[ ]ln–=
κ+
κ+ κ s
x-----Rex
c f
2-----=
κ+5.0>
κ+5.0<
x κ s⁄
c f
CF------- G
xκ s-----
2.635 0.618 xκ s-----ln+
2.57
3.476 0.707 xκ s-----ln+
2.46------------------------------------------------------------------= =
x κ s⁄ 108
= G x κ s⁄[ ] 0.896∼
G x[ ]
7American Institute of Aeronautics and Astronautics
(12)CF
12---
5.3464δx-- 213.342
Rex-------------------–
1 24.998G x[ ] δx--+
--------------------------------------------- G x[ ] +
12---
5.3464δx-- 213.342
Rex-------------------–
1 24.998G x[ ] δx--+
--------------------------------------------- G x[ ]
2
35.12
Rex 1 24.99G x[ ] δx--+
------------------------------------------------------+
2
=

section demonstrate that the closed-form model givesresults that are accurate to within 5 percent as long as
. This accuracy estimate holds for fully roughsurfaces with turbulent flow and for hydraulicallysmooth surfaces with turbulent flow occurring at theleading edge. For the remainder of this paperequation 12 is referred to as the closed-form solution.
Calculations from the various solutions methods arecompared in the Results and Discussion section. Thesecomparisons help in determining the regions ofapplicability for the solution methods.
Design of the Boundary Layer Tracking Probe
As mentioned earlier the integral form of the law ofthe wake—where the skin-friction coefficient isexpressed in terms of the local boundary layer thickness—suggests an innovative concept for a skin-frictionmeasurement device. While the actual mechanicaldesign of the probe can vary substantially, the basicconcept is that a reference pitot probe is inserted into theflow, well above the maximum anticipated thickness ofthe local boundary layer. Another pitot probe isservomechanism-driven to move normally to thesurface. A controller regulates the position of thefloating probe. As developed in Appendix B thecontinuous-time control law for this system is
(13)
In equation 13, y is the probe position measuredrelative the to the surface, is the local dynamicpressure at position y within the boundary layer, and
is the difference between the dynamic pressure atthe edge of the boundary layer and the local dynamicpressure. Choosing the natural frequency ( ) anddamping ratio ( ) so that the open-loop systemeigenvalues are stable, causes the unforced probeposition to always decay to zero. The decaying tendencyof the open-loop system insures that the measurement-probe will not remain stuck outside of the boundarylayer where the pressure difference between thereference and measurement-probes is zero. The analogflow diagram for this control equation is depicted infigure 4.
Discrete Control Law
Equation 13 is discretized using the trapezoidal16
rule. After performing some extensive algebra, thediscrete control equation is written as
(14(a))
Where the coefficients of equation 14(a) are
(14(b))
In equation 14 k is the time-frame index and is thetime interval between each frame. These equations canbe implemented recursively starting with the initialposition of the tracking probe. Since the measureddynamic pressure difference is a function of the localposition within the boundary layer, this control law isclearly nonlinear. As such, it is expected that the controllaw behavior will differ somewhat from the response ofa linear second-order system. Clearly though, n is thecontrol gain parameter. An example probe control-lawresponse for an unsteady boundary layer will bepresented in the Results and Discussion section.
Final Probe Position
When the probe is positioned within the boundarylayer so that
(15)
equation 14 is rewritten as
(16)
Since , , and are all positive constants,equation 16 implies that
(17)
Thus the difference equations converge to a steadyvalue. As a result the probe seeks a final position where
(18)
β 0.1<
y 2ζωny ωn2 n2---y+ + ωn
2 n2--- y
q--- ∆q=
q
∆q
ωnζ
yk 1+
Ak
Ck------yk
Bk
Ck------yk 1––=
Ak 2 1 ωn∆t2-----
21
n2--- ∆q[ ]
q-----------
k––
=
Bk 1 2ζωn∆t2-----– ωn
∆t2-----
21
n2--- ∆q[ ]
q-----------
k–+
=
Ck 1 2ζωn∆t2----- ωn
∆t2-----
21
n2--- ∆q[ ]
q-----------
k–+ +
=
∆t
1n2--- ∆q[ ]
q-----------
k– 0=
yk 1+ yk–1 2ζωn
∆t2-----–
1 2ζωn∆t2-----+
----------------------------- yk yk 1––[ ]=
ζ ωn δt
yk 1+ yk– yk yk 1––≤
-------final
2n---=
8American Institute of Aeronautics and Astronautics

Equation 18 is written in terms of the final velocityratio as
(19)
Equation 19 is used to correct the final probe positionby giving the proper estimate of the boundary layerheight, assuming that the velocity profile in the outerlayers of the boundary layer are approximated by apower-law function. The resulting correction factor is
(20)
In equation 20 the parameter m is the velocity profileexponent and is the function of the local Reynoldsnumber. Values for m, which are required to perform thecorrection of equation 20, are presented in the Resultsand Discussion section. Once the final probe positionhas been achieved; the boundary layer thicknessestimated by equation 20 is used to evaluate the localand averaged skin-friction coefficients using whicheverof the three solutions methods (developed earlier) isappropriate.
Results and Discussion
This section is divided into two parts: a ModelValidation section and a Probe Response section. In theModel Validation section the three solution methods forthe law of the wake model are compared. Thesecomparisons establish the errors that pressure gradientscause in the edge and closed-form solution methods.Next the closed-form solution is compared to the edgesolution for a variety of surface roughness. Finally, skinfriction coefficients and velocity profiles predicted bythe law-of-the-wake model are compared to flight-obtained boundary layer measurements. In the ProbeResponse section an example of dynamic response ofthe probe control law for a noisy boundary layer ispresented.
Model Validation
First an estimate of errors in the edge and closed-form
solution methods caused by longitudinal pressure
gradients are examined. These results are presented in
figure 5. In figure 5 the top graph shows the local skin-
friction coefficient predicted by the nonlinear model as a
function of Reynolds number. The curves correspond to
values of . The
solutions for the edge and closed-form methods (
implicit) are also plotted. For the closed-form solution
the “smooth-plate” value of was
used. For the nonlinear and edge solution
methods give nearly identical results. The closed-form
solution shows approximately a 2-percent error at
. This error diminishes to nearly zero at
. The bottom graph in figure 5 shows the
percent deviation in the closed-form model, defined by
(21)
This parameter is plotted as a function of Reynoldsnumber for values of .The calculated deviations in the edge method aresmaller than those shown in the figure 5 bottom graphby approximately 1 percent. These data are not shown.The deviations shown in this bottom graph of figure 5are also representative of the errors that are expected forthe averaged skin friction values. Clearly, there is errorintroduced by the simplifying assumptions used inderiving the closed-form model. However, if the localpressure gradient is small ( ), the errors areless than 5 percent over a very wide range of Reynoldsnumbers.
The simplifying assumption was introduced into theclosed-form model by the simplifying assumption ofequation 11. However, as shown in figure 5, this error isless than 2 percent over a wide Reynolds number rangefor a hydraulically smooth surface. Figure 6 shows howthis error varies as a function of surface roughness. Thefigure 6 top graph compares the edge solution foraveraged skin-friction coefficient to the closed-formaveraged skin-friction coefficient. The data presented onthis curve were computed for a Reynolds number of5.0 × 107 with roughness levels varying from a verysmooth surface to a very rough surface. Also plotted onthis figure 6 top graph is the transitionally rough skinfriction roughness formula derived by White.14 Thelevel of agreement is very close. The bottom graph offigure 6 shows the percent deviation plots (where theedge solution is assumed to be the “truth set”). Thedeviations are all within 2.5 percent, even at the lowReynolds numbers. As the Reynolds number and surfaceroughness increase, the deviations diminish toapproximately zero.
Comparisons to Flight Data
Figures 5 and 6 show data in the absence ofsignificant longitudinal surface pressure gradients. Inthese two figures the closed-form model predicts the
uUe------
final
qqe-----
final
nn 2+-------------= =
δest y finaln 2+
n-------------
m 2⁄=
β 0.25 0.0 0.25 and1.0, , ,–{ }=
β 0=
G x κ s⁄[ ] 0.896=
β 0=
Rex 106
=
Rex 108
=
percent of deviation = 100c f nonlinear
c f closedform–
c f nonlinear
----------------------------------------------------×
β 0.25 0.0 0.25 and1.0, , ,–{ }=
β 0.10<
9American Institute of Aeronautics and Astronautics

averaged skin friction to within 5 percent whencompared to the more complex iterative solutionmethods. This result justifies using the simple model ofequation 12 for the real-time measurement system.Further justification is evident in comparing averagedskin friction predictions of the closed-form modelagainst data obtained from two flight experimentsconducted by Saltzman and Fisher.17, 18 During theseseries of tests, both supersonic and subsonic data wereobtained; however, since this analysis is currentlyapplied only for incompressible flow conditions, onlythe subsonic flight data were analyzed. In these flightexperiments, boundary-layer rake measurements wereobtained on the underside to the fuselage of an A-5Aaircraft, and on the wing of the XB-70-1 aircraft. Forboth series of flight tests a calibrated Preston tube wasalso installed near the rake to supply additionalmeasurements of the local skin-friction coefficients.Figure 7 shows the A-5A instrument locations andfigure 8 shows the XB-70-1 rake and Preston tubelocations. Table 1 summarizes the data points that wereanalyzed.
For the A-5A tests, all of the data points analyzedwere at angles of attack greater than 3.8°, except pointnumber 6 for which the angle of attack was 0.3°.Because the boundary-layer rake for these tests waslocated on the bottom of the vehicle, for the higherangles of attack (points 1–5) the effect of the noseboom
on the Reynolds number was ignored. For these points atotal run length of 508 cm was used. For the low angle-of-attack data point (point 6) the effect of the noseboombecame significant and a run length of 736 cm was used.For the XB-70-1 tests the run length was approximately1557.5 cm.
For each data point the boundary layer thickness wasobtained by fitting the data with a 1/mth power law
(22)
Figure 9 shows an example linear-log plot for datapoint number 2 (A-5A) in table 1. The y-intercept valueis 1.8112 and the boundary layer thickness isapproximately . The linear-logslope represents the power law exponent, hence
. Based on this “measured” boundary layerthickness, the closed-form solution was used to computeboth the averaged and local skin-friction coefficients.These data were then used with equation 3 to computethe velocity profile and momentum distribution withinthe boundary layer. Figure 10 shows the velocity andmomentum profile comparisons for data point 2 (A-5A,Rex = 2.20 × 107). Outside of the laminar sublayer, thecomparisons are excellent. Similar velocity andmomentum distribution profiles are presented infigure 11 for data point 10 (XB-70-1, Rex = 13.0 x 107).The comparisons are very similar to those in figure 10.The characteristics of these selected data points are verysimilar to all of the data points which were examined.
Figure 12 summarizes the flight data analysis.Figure 12 plots the law of the wake (averaged) skin-friction (closed-form solution) coefficients calculatedusing flight-measured boundary layer thickness againstpreviously published17, 18 values determined by theauthors. The published data include local skin frictionestimates determined from the rake data using anadaptation of the Clauser method.13 Flight-measuredPreston tube data are also shown. The Preston tube datawere analyzed using the log-law calibration method ofHopkins and Keener.10 The published data wereexpressed in terms of the local skin-friction coefficientsand must be transformed to averaged values for thecomparisons to be valid. The local skin friction datawere transformed to averaged values using the methodof Mills.15 In this method the skin friction ratio isderived from integrating the local skin friction from theleading edge of the forebody along a flow streamline tothe local position. The effect of laminar flow near theleading edge is accounted for. The result is
Table 1. Summary of subsonic flight data analyzed.
Datapoint Vehicle Rex
1 A5A 1.54e+7 6.2 0.82 508.0
2 A5A 2.20e+7 3.8 0.64 508.0
3 A5A 3.00e+7 6.4 0.60 508.0
4 A5A 3.11e+7 7.0 0.51 508.0
5 A5A 4.94e+7 3.2 0.81 508.0
6 A5A 7.42e+7 0.3 0.81 736.0
7 XB-70-1 1.14e+8 8.7 0.41 1557.5
8 XB-70-1 1.18e+8 8.1 0.49 1557.5
9 XB-70-1 1.24e+8 8.2 0.46 1557.5
10 XB-70-1 1.30e+8 8.9 0.53 1557.5
11 XB-70-1 1.33e+8 8.3 0.51 1557.5
12 XB-70-1 1.41e+8 5.5 0.94 1557.5
13 XB-70-1 1.57e+8 5.2 0.95 1557.5
14 XB-70-1 1.73e+8 5.7 0.91 1557.5
α , deg Medge x, cm
yln δ mu
Ue------ 0.99⁄ln+ln=
δ e1.8112≈ 6.118 cm=
m 7.9613≈
10American Institute of Aeronautics and Astronautics

(23)
In equation 23 is the transition Reynoldsnumber and Rex is the local Reynolds number. For thistransformation a transition Reynolds number ofapproximately 5.0 × 105 was assumed.
Figure 12 shows the skin-friction coefficients plottedagainst the normalized boundary layer height. The(adjusted) published data generally scatter about thelaw-of-the-wake curve; however the scatter is large.Table 2 summarizes the mean and standard deviations ofthe adjusted rake and Preston tube CF values away fromthe law of the wake determined values.
The XB-70-1 data show a much better agreement thando the A-5A data. The reasons for the large amount ofscatter in the A-5A data are unclear. Because the testarray was located on the underside of the vehiclefuselage, it is possible that angle-of-attack effectsinduced strong local pressure gradients which had asignificant influence on the local skin frictionmeasurements. The 5- to 10-percent mean deviations arenot, however, unreasonable.
Simulation of the Boundary-Layer Tracking Probe Response
The previous section established that the integral law-of-the-wake analysis is a reasonably accurate predictor(within 5 to 10 percent) of the average skin-frictioncoefficient in the absence of large external pressuregradients. For real-time applications the closed-formsolution given by equation 12 is the preferred solutionmethod. The value of the closed-form solution is that theaveraged skin-friction coefficient can be incorporated in
calculations directly by simply measuring the localboundary layer thickness. This section analyzes thedynamics of the tracking device that is used to obtainthe boundary layer thickness measurement. In thissection the performance of the tracking probe ismodeled using both steady-state and noisy boundarylayer simulations.
Effects of the Control Gain Parameter
In this series of simulations the boundary layerthickness and the velocity profile are assumed to beconstant as a function of time. The probe is released attime with a starting value of . Tomatch the expected transonic Reynolds numbers thatatmospheric reusable launch vehicles encounter, theReynolds number was held constant at
. The simulations were all run at250 samples per second. Figure 13 demonstrates theeffect of the control gain parameter (n) on the systemresponse. Here the simulation is run with the naturalfrequency, damping ratio, and Reynolds number fixedat , , and .The control gain parameter is varied from 10 to 500.The results illustrate an interesting point regarding thetrade-off between final position of the probe and theoscillatory stiffness of the model response. As predictedby equation 19, when the gain is increased, the finalposition of the probe is closer to the boundary layeredge. Unfortunately, high gain values induce anundesirable response in the system, and the probe neversettles down to a stable value. Clearly, it is preferable toallow the probe to track at some fraction of theboundary layer height, and correct the final positionusing equation 20. It is recommended that values of n bekept somewhere within the range from 20 to 50.
Correction for the Final Probe Position
The velocity profile exponent (m), which was requiredto correct the final probe position and estimate the trueboundary layer thickness, was determined by running aseries of simulations in which the Reynolds number andgain parameter were allowed to vary. These results arepresented in figure 14. Figure 14 shows the variation ofm with Reynolds number for control gains of 10, 20, 50,100, and 200. The data of figure 14 were fit with asimple linear model of the form
(24)
Table 2. Deviations of flight measured from law of the wake.
Rake Preston tube
,percent
,percent
,percent
,percent
A-5A 10.68 31.0 1.2 27.0
XB-70-1 –5.9 11.7 –5.3 10.7
CF
c f-------
2.9187
Rextr
---------------- ln2
0.06Rex[ ]Rextr
Rex------------=
+ 1.1495 1Rex
Rextr
------------2 0.06Rex[ ]ln
2 0.06Rextr[ ]ln
-------------------------------------–
Rextr
CF
µ σ µ σ
t 0= y δ⁄ 0.25=
Rex 5.0 107×=
ωn 4π sec1–
= ζ 0.7071= Rex 5.0 107×=
m n Rex,[ ] C0 n[ ] C1 n[ ]10
Rex[ ]log+=
11American Institute of Aeronautics and Astronautics

The coefficients of equation 24 are displayed inTable 3.
Linear interpolations of the coefficients in Table 2, asa function of n, are used to obtain a correction functionfor the final probe position.
Tracking an Unsteady Boundary Layer
The steady-state analyses of the previous section wereextremely useful in understanding the dynamics of thetracking probe control law; however, a true boundarylayer is not at all stationary. In reality a turbulentboundary layer has random elements and instantaneousvariations that can only be statistically predicted. Theresult is an intermittent boundary layer with a raggedshape. In the outer regions of the boundary layer thereare turbulent fluctuations which extend beyond thenormally defined boundary layer edge. Conversely,there are intermittent regions inside of the normallydefined boundary layer where the velocity is equal to thefree-stream velocity. The law-of-the-wake analysispresented in this paper deals only with the time-averaged velocity components of the boundary layer.However, the dynamic flow components will effect theperformance of the boundary layer tracking probe andthis flow intermittency must be modeled in the probesimulation. In this paper the random components withinthe boundary layer are modeled using data taken fromKlebanoff.19 This intermittent boundary-layer model isdeveloped in detail in Appendix B.
The response of the probe to an intermittent boundarylayer will now be presented. Reynolds number was setat Rex = 5.0 × 107, and the natural frequency, dampingratio, and control gain parameter were varied todetermine the best combinations required in order toaccurately track the edge of the boundary layer. Usingthe corrected probe position, the skin-friction coefficientis computed using equation 12. Figure 15 presents theresults of a noisy simulation run with a very stiff controllaw. In this simulation the parameters were set at
, , and . Theresponse of the tracking probe and the corrected probeposition are shown relative to the normalized boundarylayer edge in figure 15(a). The estimated skin-frictioncoefficient calculated using equation 12 is showncompared to the known value in figure 15(b). The probeposition correction based on equation 25 works quitewell and the estimated skin-friction coefficient trackswithin 5 percent of the “truth value”–once the initialstartup transient has died out. This simulation ispresented for illustrative purposes only. The particularvalues which are preferred for the control lawparameters must be tuned to the test conditions,hardware characteristics, desired probe response time,and noise rejection characteristics. Clearly more workneeds to be performed in this area.
Summary and Concluding Remarks
Lifting body and wing body designs currentlyadvocated for transatmospheric reusable launch vehiclesare derived from variations on the original lifting bodyconcept. These designs have large base areas relative tothe vehicle wetted area. Thus the base drag has a largeimpact on critical vehicle performance parameters suchas maximum payload and maximum cross-range. Anydecrease in base drag can have the potential tosignificantly improve the overall vehicle performance.Recent work has demonstrated that by increasing theforebody drag of these vehicle shapes it may be feasibleto reduce the base drag so significantly, that the overalldrag of the vehicle can be reduced. Methods foroptimizing this drag reduction process are currentlybeing studied.
Any attempt to implement the drag optimizationrequires a practical method for measuring the viscousforebody drag of the vehicle in real time. To be practicalfor the optimization problem, skin frictionmeasurements must be self-contained, that is, they mustbe installed onboard the vehicle entirely. As discussed,none of the existing methods for sensing the surfaceskin friction are readily adaptable to the aboveoptimization problem.
This paper proposes a new method based on the lawof the wake. In this concept a reference pitot probe isinserted into the flow, well above the anticipatedmaximum thickness of the local boundary layer.Another probe is servomechanism-driven and floatswithin the boundary layer. A controller regulatesposition of the floating probe. The measuredservomechanism-position gives a direct measurement ofthe local boundary layer height. The measured boundary
Table 3. Velocity profile exponent: fit coefficients.
n C0 Cl
10 –0.51785 0.95893
20 0.11626 0.96786
50 0.69694 1.06950
100 1.29530 1.14760
200 1.89040 1.24180
ωn π 2 –1sec⁄= ζ 0.7071= n 25=
12American Institute of Aeronautics and Astronautics

layer height is related to the local and longitudinallyaveraged skin friction by an integral form of the law ofthe wake.
In the law-of-the-wake analysis the turbulentboundary layer velocity profile equations werenumerically integrated across the boundary layer depthto develop an engineering model that relateslongitudinally averaged skin-friction coefficients tolocal boundary layer thickness. The law-of-the-wakeanalysis develops three solution methods: 1) an iterativenonlinear solution, 2) an edge solution where the localskin friction is evaluated from the law of the wake at theedge of the boundary layer, and 3) a less-general closed-form solution. The non-linear solution method solvesfor the local skin friction coefficient, momentumthickness, displacement thickness, and the boundarylayer shape parameter. The nonlinear solution method isgenerally applicable to smooth surfaces with arbitrarylongitudinal pressure gradients, but does not allow theaveraged skin-friction coefficient to be evaluated. Theedge method is valid only when the pressure gradientsare small, but allows both the local and averaged skin-friction coefficients to be solved for. The edge method isvalid for smooth, transitionally rough, and fully roughsurfaces. The closed-form solution method is the leastgeneral of the three solution methods and is applicableonly for fully rough surfaces when the pressure gradientis small. The closed-form solution offers the clearadvantage of being an explicit solution; whereas, thefirst two methods require an iterative calculation. Forreal-time applications, as long as the flow constraints arenot violated, the closed-form method is clearly thepreferable choice.
Comparisons of the closed-form solution method toflight data show that the velocity longitudinally
averaged skin friction can be sensed with reasonableaccuracy. The flight data show that it is clearly possibleto achieve mean accuracies on the order of 5 to10 percent. Applying corrections for the longitudinalpressure gradient and the effects of compressibility canlikely reduce these errors further.
The dynamics of the tracking device used to obtainthe boundary layer thickness measurement werepresented. The performance of the tracking probe wasmodeled using both steady-state and noisy boundarylayer simulations. Simulation results showingperformance of the boundary layer tracking probe for anoisy boundary layer were presented. The particularvalues that are preferred for the control law parametersmust be tuned to the test conditions to obtain the desiredprobe response time and noise rejection by the probecontrol law.
To be more generally applicable, additionalcomparisons of the integral law of the wake to transonicand supersonic flight data should be performed. Ifpossible, a compressibility correction must bedeveloped. Additional data comparisons should also beperformed for known pressure gradients, a larger rangeof Reynolds numbers, and for a variety of surfaceroughness patterns. So far, this demonstration isincomplete. Clearly, this tracking device must be builtand tested. A definitive set of criteria for selecting thecontrol law parameters, one that includes the effects ofthe probe hardware, must be developed. However, theresults presented in this paper are very encouraging. Thesimulation results clearly confirm that the trackingprobe can be designed to accurately measure the skinfriction in a real-time environment.
13American Institute of Aeronautics and Astronautics

Figure 1. Subsonic correlation of base and viscous forebody drag coefficients.
Figure 2. Visualization of the drag bucket.
.1Viscous forebody drag coefficient
Bas
e d
rag
co
effi
cien
t
1.5
1.0
.5
0
LASRE/X-33
990462
Shuttle
X-15
M2-F3X-24A
X-24B
HL-10
M2-F1
.001 .01 1 10
2-dimensional curve, ref. 23-dimensional curve, ref. 3Full-scale flight vehicle data(Note: Coefficients referenced to base area)
X-15
X24-B
M2-F3
X24-A
M2-F1 HL-10
Shuttle
HL-10
M2-F1
X24-A
M2-F3X24-B
Shuttle
X-15
LASRE
LASRE
Note: Coefficients referenced to base area
.1Viscous forebody drag coefficient
Dra
g c
oef
fici
ent
.8
.6
.4
.2
0
990463
.01 1
CDbase,
model
CDtotal, model
14American Institute of Aeronautics and Astronautics

Figure 3. Conceptual schematic of boundary layer tracking probe.
Figure 4. Analog flow diagram of boundary layer probe control law.
qref
yδ
Servomechanism actuator
Reference probe
990464
Moveable measurement probe
Differential pressure sensor
External flow
–
∆q–
Boundary layer
/ / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / / /
+
••–
+
•
–
–
∆q
ωn2
ωn2
n/2 X+
–
2 ζ ωn
I (t)
y(0) y(0)
y(t)I (t)
y(t)
990465
Boundarylayer
y(t)Sensordynamics
Feedback control input
q(y)
–
–
qe
15American Institute of Aeronautics and Astronautics

Figure 5. Effect of pressure gradient on the law of the wake solution methods.
Note: Skin-friction coefficient referenced to wetted area
Closed-form solution, eqn. 12Edge solution, eqn. 8bNonlinear solution, β = 0Nonlinear solution, β = – 0.25Nonlinear solution, β = 0.25Nonlinear solution, β = 1.0
β = – 0.25
β = – 0.10β = 0
β = 0.10
β = 1.00
β = 0.25
Eqns. 4, 5, and 6
Dev
iati
on
in c
f, p
erce
nt
c f
10
100
0
–10
–20
–30
.001
.002
.003
.004
50
990466
2010
Rex x 106521
16American Institute of Aeronautics and Astronautics

Figure 6. Effect of surface roughness on the law of the wake solution methods.
Figure 7. Schematic showing location of boundary layer instrumentation on A-5A aircraft.
Dev
iati
on
in c
f, p
erce
nt
c f
3
100
2
1
0
–150
990467
2010
Rex x 106
Rex = 5 x 107
x/κs
521
.02
.01
010 100 1,000 10,000
cf, White's transitionally rough theory
Smooth surfacex/κs = 5000x/κs = 1000
x/κs = 500x/κs = 100x/κs = 50
508 cm
Rake location 990468
17American Institute of Aeronautics and Astronautics

Figure 8. Schematic showing location of boundary layer instrumentation on XB-70-1 aircraft.
Figure 9. Linear-log plot of boundary layer rake data.
990469
56.62 m
5.54 m
9.14 m43.5 m
15.6 mWing sensor complex
32 m
Ln [u/(0.99Ue)]
Ln
[y]
2
1
0
–1
–.5–2
–.4 –.3 –.2 –.1 0
990470
A-5A lower fuselage boundary layer rake data
Ln [y] = 1.8112 + 7.9613 Ln [u/(0.99Ue)]
Rex = 2.22 x 107
Measured profileLinear-log fit
18American Institute of Aeronautics and Astronautics

Figure 10. Comparison of law of the wake model against A-5A lower fuselage boundary layer rake.
u/U
e(1
– u
/Ue)
u/U
e
1.2
.0001 .001 .01 .1 1.0 10.0
990471y/δ
1.0
.8
.6
.4
.2
0
.3
.2
.1
0
Law of the wakeA-5A fuselage rake data
Momentum deflect profile
Rex = 2.2 x 107
Velocity profile
19American Institute of Aeronautics and Astronautics

Figure 11. Comparison of law of the wake model against XB-70-1 wing surface boundary layer rake data.
1.2
1.0
.8
.6
.4
.2
0
.3
.2
.1
0.0001 .001 .01
y/δ.1 1.0 10.0
990472
u/U
e(1
– u
/Ue)
u/U
e
Rex = 13.0 x 107
Rex = 13.0 x 107
Law of the wakeXB-70-1 wing rake data
Momentum deflect profile
Velocity profile
20American Institute of Aeronautics and Astronautics

Figure 12. Summary of flight data, skin-friction coefficient comparisons.
CF – Law of the wake (closed-form solution)CF – XB-70-1 (adjusted rake data)CF – XB-70-1 (adjusted preston probe data)CF – A-5A (adjusted rake data)CF – A-5A (adjusted preston probe data)
Ski
n f
rict
ion
co
effi
cien
t
.003
.02
990473
.01
δ/x
0
.002
.001
21American Institute of Aeronautics and Astronautics

Figure 13. Effect of the control gain parameter on probe response.
Figure 14. Velocity profile exponent.
y/δ
2.0
2.0
990474
1.51.0Time, sec
.50
1.8
1.6
1.4
1.2
1.0
.8
.6
.4
.2
n = 500 n = 200 n = 100 n = 50 n = 20n = 10
Rex = 5 x 107, ωn = 4π, ξ = 0.70717
Rex x 106
Bo
un
dar
y la
yer
velo
city
pro
file
exp
on
ent
12
100.010.01.0
990475
.1
10
8
6
4
Curve fit compared to Reynolds number
n = 10n = 20n = 50n = 100n = 200
22American Institute of Aeronautics and Astronautics

Figure 15. Response of probe control law to noisy boundary layer.
y/δ
1.5
1.4
1.3
1.2
1.1
1.0
.9
.8
.7
.6
.5
.4
.3
.2
.1
y/δ
.0030
.0028
.0026
.0024
.0022
.0020
.0018
.0016
.0014
.0012
.0010
.0008
.0006
.0004
.00020 10 20 30 40 50
Time, sec990476
Probe position
yprobe/δ
δnoisy/δ
δest/δ
^CF
CF
^
Skin friction coefficient(based on wetted area)
23American Institute of Aeronautics and Astronautics

Appendix A: IntegralLaw-of-the-Wake Analysis
This analysis develops an integral relationship thatrelates the longitudinally averaged skin-frictioncoefficient to a local measurement of the boundary layerthickness. The analysis is based on Coles’ empirical“law of the wake.” The law of the wake relates the outer(turbulent) boundary layer variables to thenondimensionalized boundary layer coordinates and canbe written in terms of the velocity defect as
(A-1)
In equation A-1, is the wake parameter and isproportional to the local pressure gradient. Equation A-1is a general expression that is valid outside of thelaminar sublayer for plates, curved surfaces, surfaceswith longitudinal pressure gradients, and roughsurfaces. For a flat plate with zero pressure gradient, thewake parameter has an approximate numerical value of
.
Correction for Laminar Sublayer
Outside of the laminar sublayer, equation A-3 hasbeen found to correlate well with measurements;however, within the laminar sublayer the correlationbreaks down. In the laminar sublayer the correlation isbetter represented by the relationship, u+ = y+, and theresulting velocity defect law in the laminar sublayer is
(A-2)
Equation A-2 strictly holds for and equationA-1 strictly holds for . Between these limitingvalues, the boundary layer velocity profile is
transitional. Spalding20 has offered a transitionalformula for this buffer layer; but with minimal loss inaccuracy a simpler model can be developed by equatingA-1 and A-2
(A-3)
Allowing that the cosine term in equation A-3 isapproximately 1, equation A-3 may be solvednumerically, to produce
(A-4)
Thus for equation A-2 is used as thevelocity defect model and for equation A-1is used as the velocity defect model.
Momentum and Displacement Thickness Calculation
The fundamental definitions for the (incompressible)momentum and displacement thickness are
(A-5)
(A-6)
If the integrals of equations A-5 and A-6 areintegrated across the depth of the boundary layer, usingequation A-2 to evaluate the velocity defect within thelaminar sublayer ( ) and equation A-1 in theturbulent layer ( ), then an integral form ofthe law of the wake can be derived. The laminarcontribution to the momentum and displacementthickness are given as
(A-7)
(A-8)
1 u y( )Ue
-----------– =
c f
2-------- 4.878Π 1 2 π
2--- y
δ--sin–
2.439yδ--ln– =
1 u y( )Ue
-----------– =
c f
2-------- 4.878Π 2 π
2--- y
δ-- 2.439
yδ--ln–cos
Π
Π 0.55∼
1u
Ue------– 1
yδ--δ
x--Rex
c f
2-----– 1
c f
2-----y
+–= =
y+
5<y
+25>
1c f
2-----ytrans
+
–c f
2----- 4.878Π 2
π2---
ytrans
δ--------------cos=
2.439ytrans
δ--------------ln–
ytrans+
10.81≈
y+
10.81<y
+10.81≥
θ u y( )Ue
----------- 1 u y( )Ue
-----------– yd0
δ∫=
δ*1 u y( )
Ue-----------– yd
0
δ∫=
y+
10.81<y
+10.81>
θlam 58.428x
Rex--------- 1 7.207
c f
2-------–
==
δlam*
58.428x
Rex---------=
24American Institute of Aeronautics and Astronautics
(A-9)
θturb δ c f 15.288x
Rex---------–
=
1.72463 Π 1+[ ] c f – 4.46154Π29.45545Π 5.9486+ +[ ]

The turbulent contribution is given as
(A-10)
Adding the laminar contributions and turbulentcontributions together the total normalized momentumand displacement thickness equations become
(A-11)
and
(A-12)
Relationship of Wake Parameter to Local Pressure Gradient
As mentioned earlier in this appendix, the wakeparameter ( ) is related to the local pressure gradient.The wake parameter has been correlated to the localpressure gradient by White20 as a polynomial curve fitof the form
(A-13)
In equation A-13 is the Clauser parameter. Solvingfor in terms of and substituting into equationsA-11 and A-12 the momentum thickness anddisplacement thickness equations can be written withthe nondimensional pressure gradient as an explicitparameter in the equations
δturb* δ c f 15.288
xRex---------–
=
1.72463 Π 1+[ ]{ }
θx---
δx-- c f
1.72463 Π 1+[ ]{ }=
c f 4.46154Π29.45545Π 5.9486+ +[ ]–
+ 1
Rex--------- 32.0797 26.3483Π–[ ]
68.208+ c f Π 0.978711–[ ] Π 3.09803+[ ]
δ*
x-----
δx-- c f
1.72463 Π 1+[ ]{ }=
+ 32.0805 26.3483Π–[ ]
Rex------------------------------------------------------
Π
0.42Π20.76Π 0.545–+ β δ*
c f-----
∂p∂x------
q------≡=
βΠ β
25American Institute of Aeronautics and Astronautics
(A-14)
and
(A-15)
θx---
δx-- c f
0.16425 2.66116 0.88881 β++[ ]
10.4874 10.6227β 2.13276 0.88881 β++ +[ ] c f –=
+ 55.9194 40.6563 0.88881 β+–
Rex------------------------------------------------------------------------------
+ c f 137.422– 162.4β 32.6051 0.88881 β++ +[ ]
Rex---------------------------------------------------------------------------------------------------------------------------
δ*
x-----
δx-- c f
0.16425 2.66116 0.88881 β++[ ][ ]=
+ 55.9194 40.6563 0.88881 β+–
Rex------------------------------------------------------------------------------ +

Appendix B: Unsteady Boundary Layer Model
In a real-world turbulent boundary layer there arerandom elements whose characteristics can only bestatistically predicted. Mathematically, this randomelement is treated by decomposing the boundary layervelocity components into time-mean and perturbationcomponents.
(B-1)
The point-to-point variations of the perturbationcomponents are inherently intermittent and can never betheoretically predicted. The law-of-the-wake analysispresented in the paper deals only with the time averagedvelocity components of the boundary layer. However,the dynamic flow components will effect theperformance of the boundary layer tracking probe andthis flow intermittency must be modeled in the probesimulation. In this paper the random components withinthe boundary layer are modeled using data taken fromKlebanoff.19 The intermittency factor is the fraction oftime that the flow is turbulent at a given perpendiculardistance away from the wall. The intermittency factor isplotted as a function of the normalized perpendiculardistance in figure B-1. The raw data from Klebanoff’sreport are presented along with a curve-fit model
(B-2)
This intermittency function is used as a probabilitydensity function which describes the time distribution ofa particular velocity component. Assuming that thetime-mean y and z velocity distributions areapproximately zero, then the intermittent boundarylayer model is written as
(B-3)
In equation B-3 is a uniformly distributedrandom number, and the terms , , and are theexpected values for the perturbation magnitudes. Theseparameters are also derived from curve fits of datapresented by Klebanoff. These data are presented inFigure B-2. The unusual shape of the data curves wasdifficult to curve-fit. Instead these data were loaded intothe simulation as tables and their values were computedas a function of using a log-linear interpolation.
The resulting model produces a boundary layer with aragged shape. In the outer regions of the boundary layerthere are turbulent fluctuations which extend beyond thenormally defined boundary layer edge. Conversely,there are intermittent regions inside of the normallydefined boundary layer where the velocity is equal to thefree-stream velocity. At each time point the dynamicpressure profile within the boundary layer is computedby taking the inner produce of the velocity componentsin equation B-3 and using this result to scale theundisturbed dynamic pressure profile.
(B-4)
In equation B-4 u’, v’, and w’ are the random velocityperturbations evaluated using the formulas ofequation B-3, and U is the steady longitudinal velocityin the boundary layer at location y. The intermittentboundary layer thickness is computed as the value of ywhere
(B-5)
u x y z t, , ,[ ] U x y z, ,[ ] , u' x y z t, , ,[ ]+=
v x y z t, , ,[ ] V x y z, ,[ ] v' x y z t, , ,[ ]+=
w x y z t, , ,[ ] W x y z, ,[ ] w' x y z t, , ,[ ]+=
γ 1 5yδ--
6+
1.4–=
u x y z t, , ,[ ] U x y z, ,[ ] u' γη t[ ]+=
v x y z t, , ,[ ] v' γη t[ ]=
w x y z t, , ,[ ] w' γη t[ ]=
η t( )u v w
y δ⁄
qunsteady 1 2Uu' u'2
v'2
w'2
+ + +
U2
----------------------------------------------------+ qsteady=
δ U2
2Uu' u'2
v'2
w'2
+ + + + Ue=→
26American Institute of Aeronautics and Astronautics

Figure B-1. Boundary layer intermittency factor.
Figure B-2. Fluctuating velocity components in the turbulent boundary layer.
y/δ
1.2
1.21.0
990477
.8.6.4.2
1.0
.8
.6
.4
.2
0
γ
Curve fit: [1 + 5 [y/δ]6]–1.4
Vel
oci
ty p
ertu
rbat
ion
mag
nit
ud
e
.12
.10
.08
.06
.04
.02
0.0001 .001 .01
y/δ.1 1.0 10.0
990478
|u'/Ue||v'/Ue||w'/Ue|
27American Institute of Aeronautics and Astronautics

References
1 Wong, Thomas J., Charles A. Hermach, John O.Reller, Jr., and Bruce E. Tinling, Preliminary Studies ofManned Satellites—Wingless Configurations: TheLifting Body, NACA Conference on High-SpeedAerodynamics: A Compilation of the papers presented,NASA TM X-67369, 1958.
2Hoerner, Sighard F., Fluid-Dynamic Drag, Self-Published, Brick Town, New Jersey, 1965.
3Saltzman, Edwin J., K. Charles Wang, and KennethW. Iliff, “Flight-Determined Subsonic Lift and DragCharacteristics of Seven Lifting-Body and Wing-BodyReentry Vehicle Configurations With Truncated Bases,”AIAA Paper 99-0383, January 1999.
4Whitmore, Stephen A., and Timothy R. Moes, “ABase Drag Reduction Experiment on the X-33 LinearAerospike SR-71 Experiment (LASRE) FlightProgram,” AIAA 99-0277, January 1999.
5Miller, Linda, Michael Hect, Martin Buehler, AminMottiwala, Beverly Eyre, and Indrani Chakraborty,“Ceramic Hybrid Electromechanical Systems(CHEMS),” NASA Tech Briefs, Vol. 23, No. 2, February1999, pp. 61–62.
6Coles, Donald, “The law of the wake in the turbulentboundary layer,” Journal of Fluid Mechanics, Vol. 1,1956, pp. 191–226.
7Garringer, Darwin J., and Edwin J. Saltzman, FlightDemonstration of a Skin-Friction Gage to a Local MachNumber of 4.9, NASA TN D-3830, Feb. 1967.
8Quinn, Robert D., and Frank V. Olinger, Flight-Measured Heat Transfer and Skin Friction at a MachNumber of 5.25 and at Low Wall Temperatures, NASATM X-1921, November 1969.
9Naughton, J. W., and J. L. Brown, “SurfaceInterferometric Skin-Friction Measurement Technique,”AIAA Paper 96-2183, June 1996.
10Hopkins, Edward J., and Earl R. Keener, Study ofSurface Pitots for Measuring Turbulent Skin Friction at
Supersonic Mach Numbers—Adiabatic Wall, NASATN-D-3478, July, 1966.
11Keener, Earl R., and Edward J. Hopkins, Accuracyof Pitot-Pressure Rakes for Turbulent Boundary-LayerMeasurements in Supersonic Flow, NASA TN D-6229,March 1971.
12Mills, Anthony F., Heat and Mass Transfer, IrwinPublishing Co., Homewood, Illinois, 1992.
13Clauser, Francis H., “Turbulent Boundary Layers inAdverse Pressure Gradients,” Journal of AeronauticalSciences, Vol. 21, No. 2, 1954.
14White, Frank M., Viscous Fluid Flow, McGraw-Hill, Inc., New York, 1991.
15Mills, A. F. and Xu Huang, “On the Skin Frictionfor a Fully Rough Flat Plate,” Journal of FluidsEngineering, Technical Briefs, Vol. 105, September1983, pp. 364–365.
16Rade, Lennart, and Bertil Westergren, BetaMathematics Handbook, 2nd ed., CRC Press Inc., BocaRaton, Florida, 1990.
17Fisher, David F., and Edwin J. Saltzman, Local SkinFriction Coefficients and Boundary-Layer ProfilesObtained in Flight from the XB-70-1 Airplane at MachNumbers up to 2.5, NASA TN D-7220, June 1973.
18Saltzman, Edwin J., and David F. Fisher, SomeTurbulent Boundary-Layer Measurements Obtainedfrom the Forebody of an Airplane at Mach Numbers upto 1.72, NASA TN D-5838, June 1970.
19Klebanoff, P. S., Characteristics of Turbulence in aBoundary Layer with Zero Pressure Gradient, NACAReport 1247, 1955.
20Spalding, D. B., and S. W. Chi, “The Drag of aCompressible Turbulent Boundary Layer on a SmoothFlat Plate With and Without Heat Transfer,” Journal ofFluid Mechanics, Vol. 18, 1964, Cambridge UniversityPress, New York, New York, pp. 117–143.
28American Institute of Aeronautics and Astronautics

REPORT DOCUMENTATION PAGE Form ApprovedOMB No. 0704-0188
Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering andmaintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information,including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington,VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188), Washington, DC 20503.
1. AGENCY USE ONLY (Leave blank) 2. REPORT DATE 3. REPORT TYPE AND DATES COVERED
4. TITLE AND SUBTITLE 5. FUNDING NUMBERS
6. AUTHOR(S)
8. PERFORMING ORGANIZATION REPORT NUMBER
7. PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES)
9. SPONSORING/MONITORING AGENCY NAME(S) AND ADDRESS(ES) 10. SPONSORING/MONITORING AGENCY REPORT NUMBER
11. SUPPLEMENTARY NOTES
12a. DISTRIBUTION/AVAILABILITY STATEMENT 12b. DISTRIBUTION CODE
13. ABSTRACT (Maximum 200 words)
14. SUBJECT TERMS 15. NUMBER OF PAGES
16. PRICE CODE
17. SECURITY CLASSIFICATION OF REPORT
18. SECURITY CLASSIFICATION OF THIS PAGE
19. SECURITY CLASSIFICATION OF ABSTRACT
20. LIMITATION OF ABSTRACT
NSN 7540-01-280-5500 Standard Form 298 (Rev. 2-89)Prescribed by ANSI Std. Z39-18298-102
A Real-Time Method for Estimating Viscous Forebody Drag Coefficients
WU 529-50-04-T2-RR-00-000
Stephen A. Whitmore, Marco Hurtado, Jose Rivera, and Jonathan W.Naughton
NASA Dryden Flight Research CenterP.O. Box 273Edwards, California 93523-0273
H-2394
National Aeronautics and Space AdministrationWashington, DC 20546-0001 NASA/TM-2000-209015
This paper develops a real-time method based on the law of the wake for estimating forebody skin-frictioncoefficients. The incompressible law-of-the-wake equations are numerically integrated across the boundarylayer depth to develop an engineering model that relates longitudinally averaged skin-friction coefficients tolocal boundary layer thickness. Solutions applicable to smooth surfaces with pressure gradients and roughsurfaces with negligible pressure gradients are presented. Model accuracy is evaluated by comparing modelpredictions with previously measured flight data. This integral law procedure is beneficial in that skin-frictioncoefficients can be indirectly evaluated in real-time using a single boundary layer height measurement. In thisconcept a reference pitot probe is inserted into the flow, well above the anticipated maximum thickness of thelocal boundary layer. Another probe is servomechanism-driven and floats within the boundary layer. Acontroller regulates the position of the floating probe. The measured servomechanism position of this secondprobe provides an indirect measurement of both local and longitudinally averaged skin friction. Simulationresults showing the performance of the control law for a noisy boundary layer are then presented.
Base drag, Boundary layer, Hypersonic vehicles, Skin friction
A03
34
Unclassified Unclassified Unclassified Unlimited
January 2000 Technical Memorandum
Presented as AIAA 2000-0781 at the 38th Aerospace Sciences Meeting and Exhibit, January 10–13, 2000, Reno, Nevada.Stephen A. Whitmore and Marco Hurtado, NASA Dryden Flight Research Center, Edwards, CA; Jose Rivera, Universityof South Florida, Tampa, FL; and Jonathan W. Naughton, University of Wyoming, Laramie, WY.
Unclassified—UnlimitedSubject Category 05
This report is available at http://www.dfrc.nasa.gov/DTRS/