Embed Size (px)
Citation preview

A Physically-Based Motion Retargeting Filter
SEYOON TAKHYEONG-SEOK KO
ACM TOG (January 2005) 9557526 方奎力

Outline
Introduction Approach Result Conclusion

Introduction
Constraints-based motion edit
Kinematically constrains Dynamic constrains
Segment weights 、 joint strengths…

Introduction
Novel constraints-based motion edit
Per-frame algo. -> Kalman filter May velocity relationship between
constrains -> least-squares filter

Approach
Formulation Constraints Kalman Filter Least-Squares Filter

Approach I. (Formulating constraints)
Kinematics Balance Torque limit Momentum

Approach I. (Formulating constraints)
Kinematics Locations e

Approach I. (Formulating constraints)
Balance Human are two-legged creatures -> balance
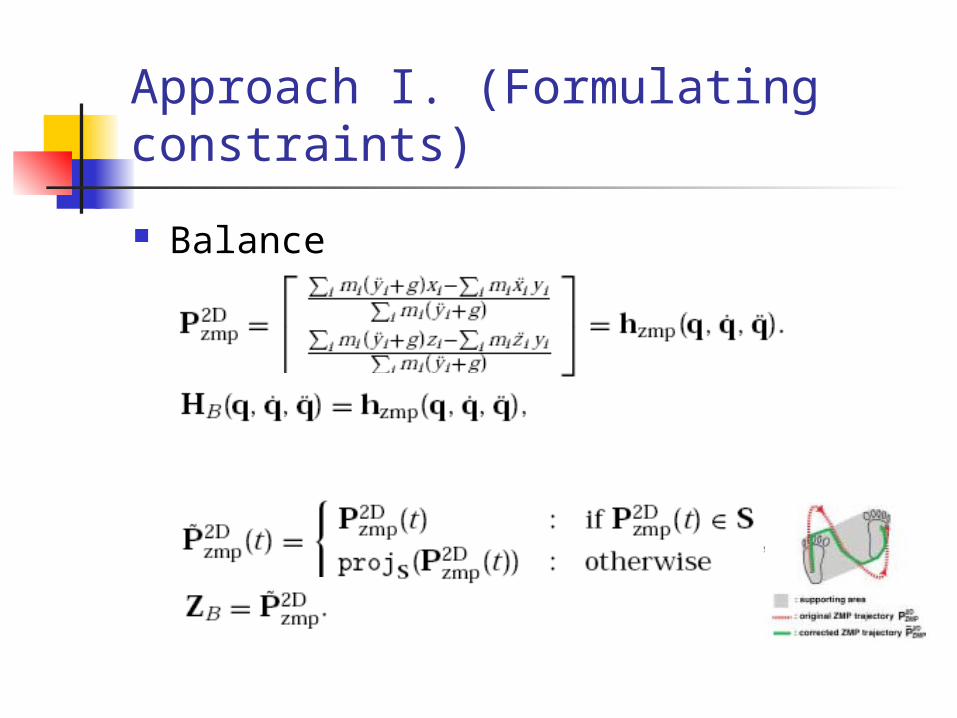
Approach I. (Formulating constraints)
Balance

Approach I. (Formulating constraints)
Torque limit

Approach I. (Formulating constraints)
Momentum Linear momentum
Angular momentum

Approach II. (Kalman filter) Kalman filter
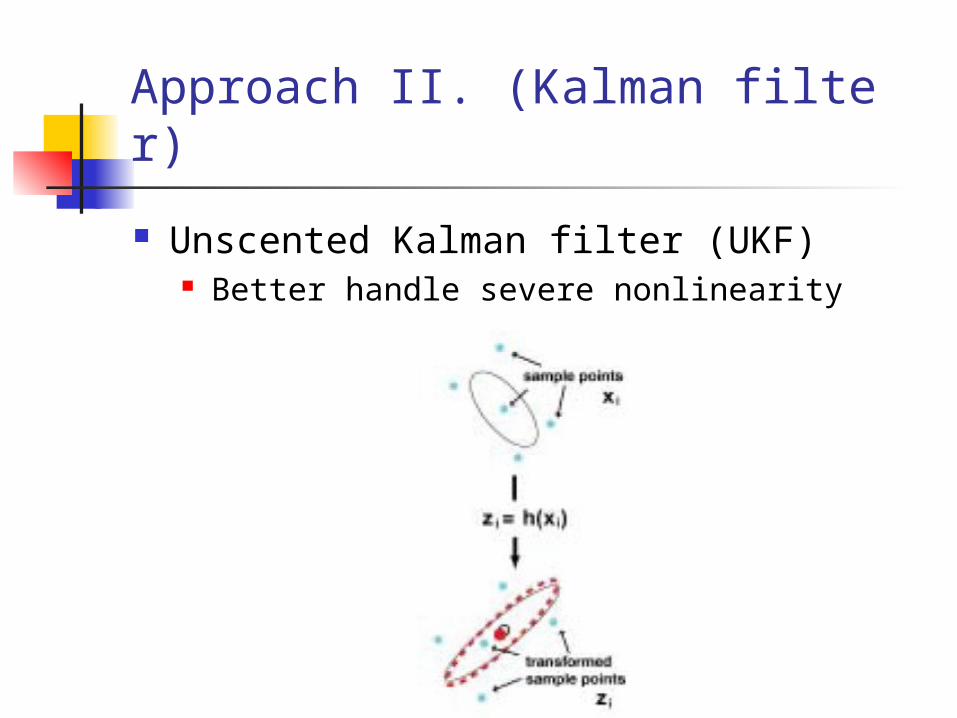
Approach II. (Kalman filter) Unscented Kalman filter (UKF)
Better handle severe nonlinearity

Approach II. (Kalman filter) Unscented Kalman filter (UKF)
Process model
Measurement
Measurement model

Approach II. (Kalman filter) Unscented Kalman filter (UKF)
1. Vx : process noise covariance

Approach II. (Kalman filter) Unscented Kalman filter (UKF)
2. Construct (2n+1) sample point

Approach II. (Kalman filter) Unscented Kalman filter (UKF)
3. Transform sample point through measurement model
Approach II. (Kalman filter) Unscented Kalman filter (UKF)
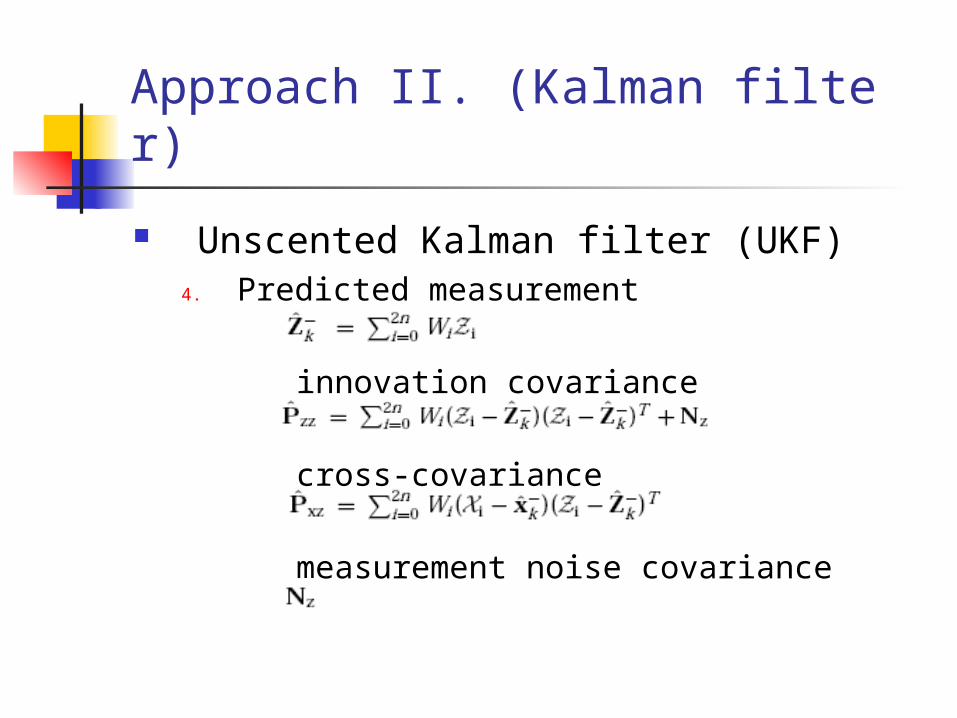
4. Predicted measurement innovation covariance
cross-covariance
measurement noise covariance

Approach II. (Kalman filter) Unscented Kalman filter (UKF)
5. Final state update

Approach III. (Least squares filter)
Independent variables Curve fitting procedure

Approach III. (Least squares filter)
Formulate B-spline curve

Approach III. (Least squares filter)
Over-constrained linear system

Result

Conclusion Adv.
Per-frame algo -> Stable interactive rate Constraints-base Balance constrains

Conclusion Disadv.
Noise covariance Cost of least square filter Balance constrains -> You can’t fall
Q & A




























![[B2 b:回到基本点].比尔·奎恩.扫描版](https://img.dokumen.tips/doc/110x75/55aee8291a28ab4c5e8b4658/b2-b55aee8291a28ab4c5e8b4658.jpg)
