Embed Size (px)
Citation preview

O P T I M ANo 76
March 2008
Mathematical Programming Society Newsletter
Structure Prediction and Global Optimization 2 A Celebration of 50 Years of Integer Programming 9
76
A new column for Optimaby Alberto Caprara Andrea Lodi Katya Scheinberg
This is the first issue of 2008 and it
is a very dense one with a Scientific
contribution on computational biology,
some announcements, reports of
conferences and events, the MPS Chairs
Column. Thus, the extra space is limited
but we like to use few additional lines
for introducing a new feature we are
particularly happy with. Starting with
issue 76 there will be a Discussion
Column whose content is tightly related
to the Scientific contribution, with
a purpose of making every issue of
Optima recognizable through a special
topic. The Discussion Column will take
the form of a comment on the Scientific
contribution from some experts in
the field other than the authors or
an interview/discussion of a couple
of experts in the area or some other
short contribution which may reflect
alternative points of view related to the
special topic.
We hope our readers will enjoy the new
column and we strongly encourage
feedbacks especially in terms of
suggestions for topics to be covered in
future issues.
Marco LocatelliDip. Informatica, Univ. di Torino (Italy)
Fabio SchoenDip. Sistemi e Informatica, Univ. di Firenze (Italy)
February 26, 2008
“Every attempt to employ mathematical methods in the study of chemical questions must be considered profoundly irrational and contrary to the spirit in chemistry. If mathematical analysis should ever hold a prominent place in chemistry — an aberration which is happily almost impossible — it would occasion a rapid and widespread degeneration of that science.” — Auguste Comte Cours de philosophie positive
“It is not yet clear whether optimization is indeed useful for biology — surely biology has been very useful for optimization” — Alberto Caprara private communication
1 IntroductionMany new problem domains arose from the study of biological and chemical systems and several mathematical programming models as well as algorithms have been developed. We are slightly more optimistic than Comte and Caprara and still believe that the use of mathematical programming tools can be valuable in biology, chemical-physics as well as in the study of innovative materials. Of course we perfectly agree on the fact that a lot of research stimuli for the optimization community originated from those fields.
In this paper we concentrate our attention on the problem of structure prediction: given some information on the composition of a complex molecule we would like to predict the structure that the molecule will most likely assume. Such a problem is a very relevant one as the properties of, e.g., biomolecules are intimately related to their three-
Structure Prediction and Global Optimization
continue on page 17 4continue on page 2 4

O P t I m A 7 6 March 2008 page 2
dimensional conformation; it is quite well accepted nowadays that this most stable conformation corresponds to a global minimum of a suitable function which represents the free energy of the molecule. Given our only limited capability of capturing the essential phenomena in a manageable energetic model, and given the fact that various factors (e.g., thermodynamic and kinetic factors) concur to determine the actual structure, it is widely believed that being able to detect the global minimum as well as other low-lying local minima is an important issue. This observation immediately leads to the application of global optimization: in order to predict the structure, first a mathematical model of the total potential energy, the energy function E, is defined, and then the function E is (globally) minimized. Defining a reasonable model E for the energy is in general an extremely complex task; many classical models include sums of terms which account for various interactions inside the molecule. In general, some terms are related to bonded interactions (forcing pairs of bonded atoms to stabilize around a fixed distance, the bond length, or favoring triplets of bonded atoms to form specific angles or quadruplets to find an equilibrium around some known dihedral angles). Other terms account for weaker interactions between non-bonded pairs; usually these interactions have the following form:
where term (1) represents the van der Waals interaction and depends on the distance Rij between any pair of non-bonded atoms; as Aij > 0 and Bij > 0, this term is composed of a repulsive term and an attractive one. Term (2) represents the Coulomb, or electrostatic, interaction and, again, depends on the pair distance Rij and on the electric charges qi and qj of the two atoms: as it is well known, atoms whose electric charges are opposite in sign contribute a negative (attractive) term to the energy, while the
opposite is true for pairs of atoms with charges of the same sign. In most energy models, covalent bonds are considered to be too strong to be broken or modified at physiological temperatures, so the only degrees of freedom of complex molecules can be considered as those associated with non bonded pairs. This is the reason why in many applications terms (1)-(2) are the only ones taken into account in optimization, as all the other terms are assumed to contribute a constant term to the total energy.
Globally minimizing E turns out to be a very challenging task. Several discretized and simplified versions of the problem have been proven to be NP-hard (see, e.g., [8]). The main source of difficulty is not necessarily the dimensionality of the problem (in some cases the number of control variables is very small) but the huge number of local (and not global) minima of the energy function E, which rules out any trivial Multistart approach. Moreover, in some cases a single function and/or gradient evaluation of E may be extremely expensive.
A very deep survey on the models which are currently used to describe the energy of complex molecules can be found in [49]; an in–depth analysis on the characteristics of nanoclusters can be also found in [2]. We cannot close this introduction without citing some recent developments in the field of energy modeling, which we cannot survey here but which are of great interest for mathematical programming. We refer to approaches which, differently from classical ones which start “ab initio” and try to form models according to first principles, are based on the desire of finding a model for which the structures which are observed in nature are indeed global minima of the model, while structures obtained through perturbation of the observed ones are not. Models can be built through linear combination of suitable base functions; given the enormous amount of knowledge already available in protein databases, the parameters of these models can be obtained through the solution of huge linear programs. We do not comment any more on this subject, but refer the interested reader to [47].
In the following we will present in some detail the most important models for atomic and molecular clusters and will give a short introduction to the more challenging problems of protein docking and protein folding. Then, in Section 3 we will introduce some basic ideas underlying many of the global optimization approaches used to solve these problems.
2 Structure prediction problemsIn this section we review some well known structure prediction problems.
2.1 Cluster optimizationIn cluster optimization we are given N particles (atoms or molecules) and an energy function E, which depends on the relative positions of the particles in the 3D-space; we aim at detecting the global minimum of the energy function. Different energy functions have been proposed in the literature. Within the field of atomic clusters usually only non-bonded interactions are accounted for and in the simplest models, particles are considered to be charge-free. Such potentials only depend on the distance Rij between pairs i, j of atoms, thus, for a cluster of N atoms, the function to be minimized is the following:
Different models only differ from each other for the definition of the pair potential function Epair. In the field of atomic clusters the most popular energy potential is the Lennard-Jones (LJ) one. The LJ pair potential can be defined as follows:
This potential produces very accurate representations of real clusters like, e.g., some noble gases or some metals like gold and nickel. But the interest of the LJ potential also lies in the fact that
Structure Prediction and Global Optimization
O P t I m A 7 6 March 2008 page 3
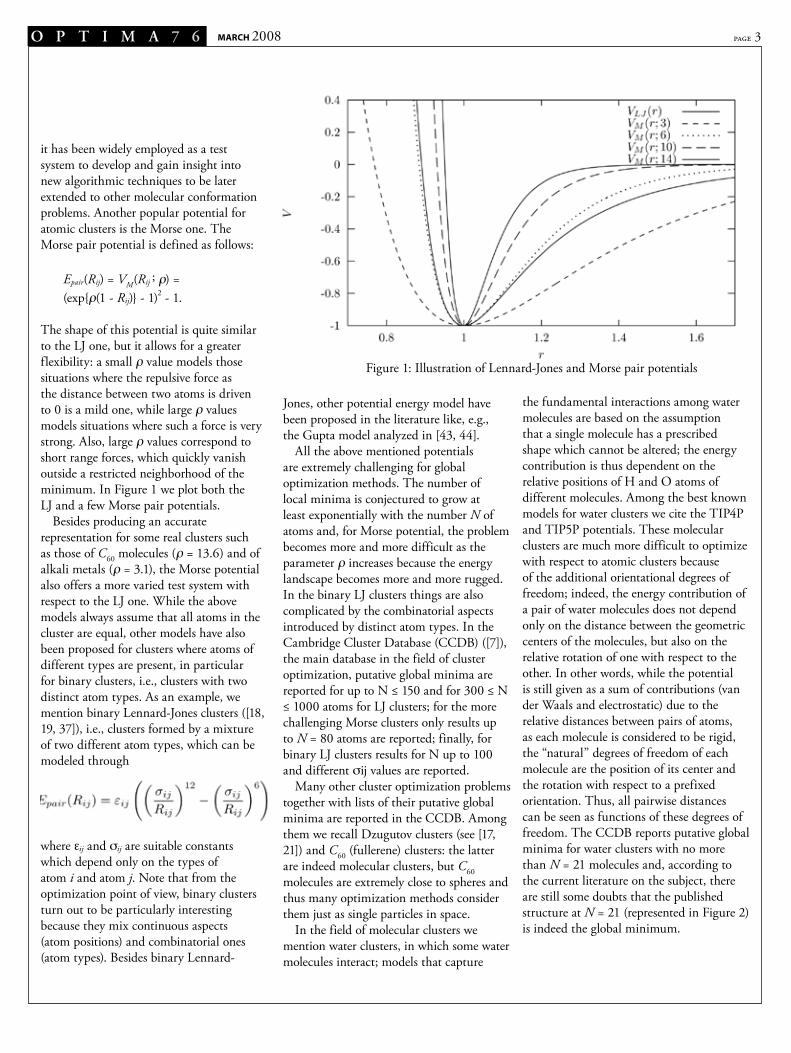
it has been widely employed as a test system to develop and gain insight into new algorithmic techniques to be later extended to other molecular conformation problems. Another popular potential for atomic clusters is the Morse one. The Morse pair potential is defined as follows:
Epair(Rij) = VM(Rij ; ρ) = (exp{ρ(1 - Rij)} - 1)2 - 1.
The shape of this potential is quite similar to the LJ one, but it allows for a greater flexibility: a small ρ value models those situations where the repulsive force as the distance between two atoms is driven to 0 is a mild one, while large ρ values models situations where such a force is very strong. Also, large ρ values correspond to short range forces, which quickly vanish outside a restricted neighborhood of the minimum. In Figure 1 we plot both the LJ and a few Morse pair potentials.
Besides producing an accurate representation for some real clusters such as those of C60 molecules (ρ = 13.6) and of alkali metals (ρ = 3.1), the Morse potential also offers a more varied test system with respect to the LJ one. While the above models always assume that all atoms in the cluster are equal, other models have also been proposed for clusters where atoms of different types are present, in particular for binary clusters, i.e., clusters with two distinct atom types. As an example, we mention binary Lennard-Jones clusters ([18, 19, 37]), i.e., clusters formed by a mixture of two different atom types, which can be modeled through
where εij and σij are suitable constants which depend only on the types of atom i and atom j. Note that from the optimization point of view, binary clusters turn out to be particularly interesting because they mix continuous aspects (atom positions) and combinatorial ones (atom types). Besides binary Lennard-
Jones, other potential energy model have been proposed in the literature like, e.g., the Gupta model analyzed in [43, 44].
All the above mentioned potentials are extremely challenging for global optimization methods. The number of local minima is conjectured to grow at least exponentially with the number N of atoms and, for Morse potential, the problem becomes more and more difficult as the parameter ρ increases because the energy landscape becomes more and more rugged. In the binary LJ clusters things are also complicated by the combinatorial aspects introduced by distinct atom types. In the Cambridge Cluster Database (CCDB) ([7]), the main database in the field of cluster optimization, putative global minima are reported for up to N ≤ 150 and for 300 ≤ N ≤ 1000 atoms for LJ clusters; for the more challenging Morse clusters only results up to N = 80 atoms are reported; finally, for binary LJ clusters results for N up to 100 and different σij values are reported.
Many other cluster optimization problems together with lists of their putative global minima are reported in the CCDB. Among them we recall Dzugutov clusters (see [17, 21]) and C60 (fullerene) clusters: the latter are indeed molecular clusters, but C60 molecules are extremely close to spheres and thus many optimization methods consider them just as single particles in space.
In the field of molecular clusters we mention water clusters, in which some water molecules interact; models that capture
Figure 1: Illustration of Lennard-Jones and Morse pair potentials
the fundamental interactions among water molecules are based on the assumption that a single molecule has a prescribed shape which cannot be altered; the energy contribution is thus dependent on the relative positions of H and O atoms of different molecules. Among the best known models for water clusters we cite the TIP4P and TIP5P potentials. These molecular clusters are much more difficult to optimize with respect to atomic clusters because of the additional orientational degrees of freedom; indeed, the energy contribution of a pair of water molecules does not depend only on the distance between the geometric centers of the molecules, but also on the relative rotation of one with respect to the other. In other words, while the potential is still given as a sum of contributions (van der Waals and electrostatic) due to the relative distances between pairs of atoms, as each molecule is considered to be rigid, the “natural” degrees of freedom of each molecule are the position of its center and the rotation with respect to a prefixed orientation. Thus, all pairwise distances can be seen as functions of these degrees of freedom. The CCDB reports putative global minima for water clusters with no more than N = 21 molecules and, according to the current literature on the subject, there are still some doubts that the published structure at N = 21 (represented in Figure 2) is indeed the global minimum.

O P t I m A 7 6 March 2008 page 4
Figure 2: Putative optimal custer for TIP5P21
2.2 molecular distance geometryThe three-dimensional structure of real-life proteins is usually determined by means of Nuclear Magnetic Resonance (NMR) and X-ray diffraction experiments. From these experiments we obtain a subset of all possible pairwise distances, from which we aim at finding a conformation of all the atoms in such a way that the constraints imposed by the subset of known distances is satisfied. More complex versions of this problem also include information about angles.
If complete information were available (all distances were known), the problem could be solved in O(N3) time (where N is the number of atoms) by eigenvalue decomposition of the distance matrix; however, when incomplete information on distances is available the problem becomes strongly NP-hard (see [45]).
To further complicate matters, distances are not usually known exactly but only lower and upper bounds can be retrieved from the experiments.
Since the introduction of the EMBED algorithm in [9], many different techniques have been proposed to solve this problem, including graph reduction [30], geometric build-up [13], Semidefinite Programming [4]. Global optimization techniques have also been proposed ( see, e.g., [36, 51]). Indeed, the problem can be easily reformulated as that of globally minimizing the cumulative relative error
or, alternatively, the cumulative absolute error:
Here X1, . . . ,XN are the positions of the
atoms, ℓij and uij are respectively the known lower and upper bound for the distance between atoms i and j, and D is the subset of distances for which lower and upper bounds are available.
2.3 Protein-protein docking and protein foldingProtein-protein docking is the process by which a large and complex biomolecule interacts with another one by forming a single complex; such complexes form the bases of most activities of all living bodies. Being able to predict the correct docking of two specific proteins is considered to be one of the most important challenges in computational biology for the next years. In rigid docking, the two interacting molecules are considered as rigid bodies; of course, this cannot be true in practice, but often the relative position of two proteins docked in this way can be used as a starting point for a flexible docking phase, in which both proteins are allowed to change their shape. In rigid docking we can formulate the problem as one of minimizing the energetic contribution of pairs composed of atoms belonging to the two different proteins – in fact internal contributions account for a constant term in the energy if the shape of each molecule is kept fixed. It can be easily understood that rigid protein docking is a low-dimensional global optimization problem: we can formulate the problem assuming that one of the two molecules is kept fixed, and thus there are only six degrees of freedom: three translation and three rotation parameters which enable to identify the relative position of the two molecules. Despite the low dimension, the
complexity of rigid protein-protein docking is formidable, both because of the very rugged energy landscape, characterized by an enormous number of local optima, and as a consequence of the large number of interactions which have to be computed for each energy evaluation: proteins are usually composed of thousands of atoms and thus, given the relative position of two proteins, millions of pairwise interactions (van der Waals and Coulomb) have to be computed. As it can be easily understood, when relaxing the assumption of rigidity, the number of degrees of freedom enormously increases and the (flexible) docking problem becomes a large scale global optimization one. In [5] an approach is presented in which rigid docking is used as a tool for generating good starting conformations forflexible docking. A survey of some global optimization approaches for docking can be found in [12].
Protein folding is concerned with the determination of the three-dimensional structure of a protein given the so-called primary structure, i.e., the aminoacid sequence. A protein is, in fact, composed of a linear set of aminoacids; it is widely accepted and confirmed by several experiments and observations that the 3D structure of a protein is largely determined by the sequence of its aminoacids. In other words, proteins which are composed by the same sequence of aminoacids are considered equal and all assume roughly the same three-dimensional shape. Being able to predict the conformation of a protein built from a specific sequence of aminoacids is considered as a fundamental problem in computational biology; if we were able to solve this problem, we could simulate the folding of many synthetic proteins until we find one which folds in a prescribed and stable shape. The literature on protein folding methods is enormous; here we just refer the reader to [11, 20, 23, 46, 48] for some general references and to [22] for an interesting example of how global optimization and integer programming can be effectively used to design a novel biomolecule which might lead to the design of a more effective treatment for specific diseases.

O P t I m A 7 6 March 2008 page 5
3 Computational approachesIn this section we report some observations and related techniques which allowed to greatly increase the efficiency in solving some of the problems presented above.3.1 Funnel structureIn spite of their huge number, the local minima of the energy functions are not randomly displaced. Indeed, we can group them into a few (not necessarily disjoint) large sets called funnels. If we denote a funnel by S, then every local minimum X0 ∈ S is the starting point of (at least) one sequence of local minima within S
X0 → X1 → … → Xk = Xfinal Xi ∈ S ∀ i
such that ∀ i it holds that: • E(Xi ) > E(Xi+1), i.e., the sequence
is monotonically decreasing;• Xi+1 is “reachable” from Xi, which
basically means that a small neighborhood of Xi has a nonempty intersection with the region of attraction of the local minimum Xi+1
All the sequences with the above properties within a given funnel have a common end point, denoted by Xfinal in (4), called the funnel bottom. In Figure 3 we report an example of a one dimensional function with a funnel structure.
Note that the global minimum of an energy function is always the funnel bottom of one of its funnels. Therefore, the problem of detecting the global minimum is equivalent to the problem of detecting the lowest funnel bottom. The key observation is that the number of funnels is usually very small compared to the number of local minima. The simplest instances are those with even a single funnel (a typical example is LJ55, i.e., the LJ instance with N = 55 atoms). Hard instances are those with many funnels (this is typical for Morse instances with large ρ values) but also those with few funnels when the funnel whose bottom is the global minimum is very narrow (typical examples are LJ38 and LJ75). Simple algorithms, such as Basin Hopping and its variants (see [32, 50]), are able to reach quite efficiently a funnel bottom starting from a given local minimum. In the simplest instances with a single funnel (whose funnel bottom must be the global minimum) every run of these algorithms quickly leads to the global minimum, no matter which is the starting point, in spite of the huge number of local minima. In the hardest cases it may be necessary to run the algorithms many times in a Multistart fashion from different (usually randomly sampled) starting points before reaching the global minimum.
Figure 3: Illustration of a funnel
3.2 Geometric properties and landscape deformationLocal and global minima of the energy functions have particular geometrical structures in the 3D-space. Some approaches are based on conjectures about the geometrical structure of global minima. Some care is needed when making explicit use of such conjectures within an algorithm. One of the first methods to solve LJ instances ([38], later refined by [53]) was based on the conjecture that global minima for instances with a relatively small number of atoms have an icosahedral structure. Based on this conjecture, the search for global minima was carried on an icosahedral lattice. Though successful on many instances, the limit of this approach, as well as of any other approach making a priori assumptions about the structure of global minima, is its biasedness: it only explores a portion of the search space, the one containing minima with icosahedral structure, but is completely unable to detect global minima with a different structure. This was confirmed by the later discovery of new putative global minima with non-icosahedral structure: LJ38 (FCC structure, see [14, 24, 40]), LJ75−77,102−104 (decahedral structure, see [14, 15]), LJ98 (a new and quite unexpected structure, the Leary tetrahedron, see [31]).
Another possible way to exploit geometrical properties comes from observing that global minima of LJ and Morse instances (no matter if they have icosahedral, decahedral, close-packed or any other structure) are compact figures with particular shapes related to the three eigenvalues of their moment-of-inertia ten-sor. These shapes are usually spherical (all eigenvalues are equal), prolate (one eigenvalue is larger with respect to the other two), or oblate (one eigenvalue is smaller with respect to the other two). Figure 4 reports an example of each of these three shapes.

O P t I m A 7 6 March 2008 page 6
Figure 4: Cluster shapes: (a) spherical for LJ98, (b) prolate for M30, (c) oblate for M61.
Based on this observation, the following modification of the energy function was introduced (see [16, 33]): F = E + h (5)i.e., F is the sum of the original energy function E and of a geometric penalization term h. For LJ and Morse clusters h is defined as follows
where (xi, yi, zi) are the three coordinates of atom i, D is a parameter underestimating the diameter of the cluster (largest distance between atoms within the cluster), and w1,w2 are parameters belonging to the interval [0, 1]. This penalization term has the effect of compressing the cluster favoring its compactness, but the compression is different along the three axes. The modified function F was employed to define two-phase local searches: during the first phase a local minimum of the modified function F is detected; then, in the second phase the local minimum of F detected in the first phase becomes the starting point of a local search with the original energy function E. Parameters w1,w2 are the key ones. These are strictly related to the eigenvalues of the moment-of-inertia tensor (see [16]) and can be used to favor different shapes. For instance, if we want to favor spherical shapes we set w1 = w2 = 1 so that the first phase of two-phase local searches will favor local minima with a spherical shape with respect to local minima with other shapes. Therefore, by appropriately selecting parameters w1 and w2 we can bias the search towards special geometrical shapes. However, while in the previously mentioned approaches biasedness
is introduced by making a priori assumption on the structure of global minima with the risk of being unable to detect some global minima whose structure is not one of the a priori assumed, here we do not restrict to particular shapes, but, by means of properly chosen bias parameters w1 and w2, it is possible to drive the search towards all possible shapes. In practice it has been observed that two-phase local searches (with few choices of the parameters w1 and w2) employed within the monotonic variant of Basin Hopping (see [32]) reduces by orders of magnitudes the effort for detecting the hardest (non-icosahedral) LJ instances (see [35]) and the very difficult Morse instances with ρ = 14 (see [16]).
Here we have only discussed the geometry of LJ and Morse instances. While the above discussion can be extended to other clusters, some cases need a special attention. For instance, another potential, the Dzugutov one (see [21]), has global minima which do not have compact shapes but have polytetrahedral structures. Of course, in this case the geometric penalization (6), which favors compact shapes, is not suitable, but it is possible to think about other definitions for h which are suitable for this potential.
Water clusters represent a particularly interesting case from the geometrical point of view because of the strong competition between different three-dimensional (prism, cage) and also bi-dimensional (book, 6-ring) structures. Also in this case a suitable definition for the geometric penalization term h is a possible subject for future research.
Finally, we remark that the introduction of the geometric penalization term h induces a deformation of the energy landscape, which somehow “simplifies” it (in particular, it reduces the number of local minimizers and, even more important, of funnels). This is not the only possible way to induce deformations. Among others, we recall here the smoothing technique employed in [36] to solve molecular distance geometry problems. This is basically a deformation of function (3) depending on a parameter. For some initial value of the parameter the function is deformed into a convex one, while in the following iterations the parameter is progressively reduced and the resulting function is locally optimized
starting from the local optimizer obtained in the previous iteration. In the last iteration the parameter is fixed to 0 and the function corresponds to the original one.
3.3 Population-based approaches and dissimilarity measuresPopulation-based approaches, where a population of clusters (basically, local minima of the energy function) is grown, have been widely employed in cluster optimization (see e.g. [3, 10, 28, 33, 41] for LJ clusters, [26, 42] for Morse clusters, [29] for water clusters, [25, 39, 43, 44] for binary clusters). Besides the usual operations (mutation, crossover), a key element in these approaches is the dissimilarity measure, which measures the dissimilarity between two given clusters. One of the limits of all those approaches, like Basin Hopping and its variants, where at each iteration a single cluster is kept in memory, is the fact that in some cases different runs of these approaches often converge to the same funnel bottom, although this might not correspond to the global minimum, but only to one which is more easily reached. Population-based approaches are able to avoid this phenomenon by keeping the population diversified through a dissimilarity measure. A basic requirement for such a measure is to be able to recognize the equivalence (dissimilarity measure equal to 0) between a cluster and every possible result of rotations and/or translations of the cluster itself. In population-based approaches each newly generated cluster is compared only to similar clusters within the current population and replaces one of them if it has a lower energy. The choice of the dissimilarity measure is essential for the efficiency of the approach. In [33] a measure for LJ instances is proposed. In [26] different measures are tested and compared over some hard LJ and Morse instances and the results make clear the high impact of the choice of the measure on the efficiency of the approach. We also refer to [27] for an experimental analysis giving some insight into the results of the population based approach presented in [26]. Some measures have also been introduced to discriminate between different geometrical structures. For instance, the g value in [28], based on a projection of the cluster over a plane, is small for close-packed

O P t I m A 7 6 March 2008 page 7
structures, larger for decahedral structures, and even larger for icosahedral structures.
3.4 Direct mutationDirect mutation is a special mutation operator employed in population-based approaches (see, e.g., [28, 41]). We discuss it separately because of its relevance especially when the number N of atoms increases. In spite of its importance in the field of cluster optimization, it has been observed that the performance of the Basin Hopping algorithm degrades as N increases. The main reason for this behavior is the mechanism to generate a new candidate local minimum in the neighborhood of the current local minimum. In Basin Hopping this is obtained by randomly perturbing all the coordinates of the current local minimum. This way Basin Hopping often quickly reaches a local minimum which only slightly differs from the global one, but then the final improvement towards the global minimum is a very difficult, time-consuming step, because of the perturbation at each iteration of all the atoms in the current solution, which disrupts the whole structure of the solution. Therefore, the key to improve the performance is to find other more structured and less random (or even deterministic) moves, which are defined as direct mutations. Often a direct mutation simply removes a single atom from a position (typically a position where the atom does not give a “good enough” contribution to the total energy) and tries to place it in a new and better position. Direct mutation can thus be regarded as a “fault correction” mechanism. In [28] Hartke observes that if direct mutation is employed “the resulting overall speedup can be so large that it makes all the difference between an efficient solution and impractically long computation times”.
Dynamic Lattice Searching (DLS) [6], where only atoms with high energy contribution are moved over a (dynamic) lattice made up by their own positions plus all possible vacant sites, can be viewed as a direct mutation operator.
Finally, we include in the field of direct mutation operators also the combinatorial moves employed with binary clusters (see, e.g., [19]). Such moves are the swap one (if atoms i and j are of different types, their
types are exchanged), and the change one (the type of a single atom i is changed). We remark that these moves are extremely important when dealing with binary (or, more generally, multi-atomic) clusters, because they allow to take into account the combinatorial nature of these problems.
4 Conclusions and further remarksIn the previous section on computational approaches we did not mention methods for protein docking and protein folding problems. There are several reasons for this omission. First, the literature on methods for protein conformation is so large that we cannot include even a short survey in this paper. Second, when dealing with proteins not only methods are different but, perhaps more important, models are widely different - it is not clear which model is good enough for protein prediction and docking; quite often structures generated by the minimization of an energy model have to be “manually” refined by expert biologists who have sufficient experience to visually analyze the shape of complex proteins. The difficulties associated with global optimization of different models, each one depending on suitably calibrated parameter sets, makes the comparison between algorithms quite a difficult task. This is the reason why in this survey we chose to give substantial space only to the treatment of cluster optimization, where models are well defined and widely accepted. We may also add that many of the ideas we find in the optimization of clusters and, in particular, the notion of “funnel landscape” and the methods to explore funnel bottoms, are commonly found in the literature on protein conformation. Thus, it seems that a good method for cluster optimization coupled with a good model for the evaluation of the free energy of a protein will yield a promising approach to solve protein conformation problems.
Although this paper was focused on molecular conformation problems, we are confident that some of the ideas presented here might find an application in other fields. As an example, let us consider the classical disk packing problem: although vaguely resembling a molecular conformation problem, this one is indeed quite different. First, it is based on 2D
References[1] B. Addis, M. Locatelli, and F. Schoen,
Efficiently packing unequal disks in a circle: a computational approach which exploits the continuous and combinatorial structure of the problem, Operations Research Letters, 36 (1), 37-42 (2008)
[2] Baletto F., Ferrando R., Structural properties of nanoclusters: Energetic, thermodynamic, and kinetic effects, Reviews of Modern Physics, 77, 371- 423 (2005)
[3] Barron C., Gomez S., Romero D., The optimal geometry of Lennard-Jones clusters:148-309, Computer Physics Communications, 123, 87-96 (1999)
[4] Biswas P., Toh K.-C., Ye Y., A distributed SDP approach for large-scale noisy anchor-free graph realization with applications to molecular conformation, available at www.stanford.edu/~yyye/ SISC-molecule-revised-2.pdf (2007)
[5] Camacho C.J., Vajda S., Protein Docking Along Smooth Association Path ways, PNAS, 98, 10636-10641 (2001)
[6] Cheng L., Cai W., Shao X., A conformational analysis method for
shapes; second, the model is a constrained one and thus local optimization, sampling and perturbation have to take into account the constraints. Finally, there is no “energy” to be minimized – we might think that non-overlapping circles contribute 0 to the energy and overlapping ones have +∞ penalty, but, in any case, the energetic model is radically different from those seen in this paper. Despite these differences, the authors successfully applied some of the techniques described in this paper within the “Circle packing contest” (see [1, 54]); in that contest participants were required to guess the positions of N non overlapping circles of prescribed different radii included in a smallest circular container. A quite effective algorithm was obtained by properly mixing the idea of funnel exploration, the use of populations to avoid too greedy searches and combinatorial moves (direct mutations).
We are quite confident that many other structure determination problems might be tackled with success through clever use of global optimization techniques.

page 8March 2008O P t I m A 7 6
understanding the energy landscapes of clusters, ChemPhysChem, 8, 569-577 (2007)
[7] The Cambridge Cluster Database, www-wales.ch.cam.ac.uk/CCD.html.
[8] Crescenzi P., Goldman D., Papadimitriou C., Piccolboni A., Yannakakis M., On the complexity of protein folding, J. Comput. Biol., 5, 423-65 (1998)
[9] Crippen G., Havel T. , Distance geometry and molecular conformation, Wiley (1988)
[10] D. M. Deaven, N. Tit, J. R. Morris, K. M. Ho, Structural optimization of Lennard-Jones clusters by a genetic algorithm, Chemical Physics Letters 256, 195–200 (1996).
[11] Ken A. Dill, S. Banu Ozkan, THomas R. Weikl, John D. Chodera, Vincent A. Voelz, The protein folding problem: when will it be solved?, Current Opinion in Structural Biology, 17, 342–346, (2007)
[12] David J. Diller and Christophe L.M.J. Verlinde, A Critical Evaluation of Several Global Optimization Algorithms for the Purpose of Molecular Docking, Journal of Computational Chemistry, 20, 1740–1751, (1999)
[13] Dong Q., Wu Z., A geometric build-up algorithm for solving the molecular distance geometry problem with sparse distance data, J. Global Opt., 26, 321-333 (2003)
[14] Doye J.P.K., Wales D.J., Berry R.S., The effect of the range of the potential on the structure of clusters, J.Chem.Phys., 103, 4234-4249 (1995)
[15] Doye J.P.K., Wales D.J., Magic numbers and growth sequences of small face-centered-cubic and decahedral clusters, Chem.Phys.Lett., 247, 339-347 (1995)
[16] J. P. K. Doye, R. H.Leary, M. Locatelli and F. Schoen, The global optimization of Morse clusters by potential transformations, INFORMS J. Computing, 16, 371-379, (2004).
[17] Doye J.P.K., Wales D.J., Simdyankin S.I., Global optimization and the energy landscapes of Dzugutov clusters, Faraday Discuss., 118, 159-170 (2001)
[18] Doye, J.P.K. and Meyer, L., Mapping the magic numbers in binary Lennard-Jones clusters, Phys. Rev. Lett., 95, 063401-1–4, (2005)
[19] Doye J.P.K., Meyer L., The structure of binary Lennard-Jones clusters: The effects of atomic size ratio, submitted, avaliable at http://arxiv.org/abs/cond-mat/0604250 (2007)
[20] Dzugutov M., Glass formation in a simple monatomic liquid with icosahedral inherent local order, Phys.Rev. A, 46, 2984-2987 (1992)
[21] C. A. Floudas, J.L. Klepeis, J.D. Lambris and D. Morikis, De novo protein design: An interplay of global optimization, mixed-integer optimization, and experiments, Proceedings of FOCAPD’2004, C.A. Floudas and A. Agrawal (eds.), pp. 133-146 (2004).
[22] Gomez S., Romero D., Two global methods for molecular geometry optimization, Proc. of the First European Congress of Mathematics, (Birkhauser, Basel, 1994), Vol. III, 503-509
[23] Johnston R.L., Mortimer-Jones T.V., Roberts C., Darby S., Manby F.R., Application of genetic algorithms in nanoscience: cluster geometry optimization, Lecture Notes in Computer Science, 2279/2002, 25-61 (2002)
[24] Grosso A., Locatelli M., Schoen F., A population based approach for hard global optimization problems based on dissimilarity measures, Mathematical Programming, 110, 373-404 (2007)
[25] Grosso A., Locatelli M., Schoen F., An experimental analysis of population based approach for global optimization, Computational Optimization and Applications, 38(3), 351-370 (2007)
[26] Hartke B., Global cluster geometry optimization by a phenotype algorithm with niches: location of elusive minima, and low-order scaling with cluster size, J.Comp.Chem., 20, 1752 (1999)
[27] Hartke B., Global Geometry Optimization of molecular clusters: TIP4P water, Zeit. f ¨ur Phys. Chemie, 214,9, 1251-1264 (2000)
[28] Hendrickson B.A., The molecular problem: determining conformation from pairwise distances, Ph. D. Thesis, Cornell University (1991)
[29] R. H. Leary and J. P. K. Doye, Tethrahedral global minimum for the 98-atom Lennard-Jones cluster, Phys. Rev. E, R6320-R6322 (1999)
[30] R. H. Leary, Global optimization on funneling landscapes, J. Global Optim., 18, 367–383, (2000).
[31] J. Lee, I. H. Lee, J. Lee, Unbiased global optimization of Lennard-Jones clusters for N ≤ 201 using the conformational space annealing method, Physical Review Letters 91(8): 080201/1-4 (2003).
[32] M. Locatelli, F. Schoen, Fast global optimization of difficult Lennard-Jones clusters, Computational Optimization and Applications 21, 55-70 (2002).
[33] M.Locatelli, F.Schoen, Efficient algorithms for large scale global optimization: Lennard-Jones clusters, Computational Optimization and Applications, 26, 173-190 (2003).
[34] J. Moré, Z.Wu, Global continuation for distance geometry problems, SIAM J. Optim, 7, 814-836 (1997)
[35] Munro L.J., Tharrington A., Jordan K.D., Global optimization and finite temperature simulations of atomic clusters: Use of XenArm clusters as test systems, Computer Physics Communications, 145, 1-23 (2002)
[36] Northby J.A., Structure and binding of Lennard-Jones clusters: 13 ≤ n ≤ 147, J.Chem.Phys., 87, 6166-6178 (1987)
[37] Paz-Bórbon L.O., Johnston R.L., Barcaro G., Fortunelli A., A mixed structural motif in 34-atom Pd-Pt clusters, J. Phys. Chem. C, 111(7), 2936-2941 (2007)
[38] Pillardy J., Piela L., Molecular dynamics on deformed potentials energy hypersurfaces, J.of Phys.Chem., 99, 11805-11812 (1995)
[39] Pullan W., An unbiased population-based search for the geometry optimization of Lennard-Jones clusters: 2 ≤ N ≤ 372, J. Comp. Chem., 26, 899-906 (2005)
[40] C. Roberts, R. L. Johnston, N. T. Wilson, A genetic algorithm for the structural optimization of Morse clusters, Theoretical Chemistry Accounts 104, 123–130 (2000).
[41] Rapallo A., Rossi G., Ferrando R., Fortunelli A., Curley B.C., Lloyd L.D., Tarbuck G.M., Johnston R.L., Global optimization of bimetallic cluster structures. I. Size-mismatched Ag-Cu, Ag-Ni, and Au-Cu systems, J. Chem. Phys., 122, 194308, 1–13 (2005)
[42] Rossi G., Ferrando R., Rapallo A., Fortunelli A., Curley B.C., Lloyd L.D., Johnston R.L., Global optimization of bimetallic cluster structures. II. Size-matched Ag-Pd, Ag-Au, and Pd-Pt systems, J. Chem. Phys., 122, 194309, 1–9 (2005)
[43] Saxe J.B., Embeddability of graphs in k−space is strongly NP-hard, in 17th Allerton Conference in Communication, Control and Computing, 480-489 (1979)
[44] H. A. Scheraga, A. Liwo, S. Oldziej, C. Czaplewski, J. Pillardy, D. R. Ripoll, J. A. Vila, R. Kazmierkiewicz, J. A. Saunders, Y. A. Arnautova, A. Jagielska, M. Chinchio, and M. Nanias, The protein folding problem: global optimization of force fields,

page 9March 2008O P t I m A 7 6
Frontiers in Bioscience, 9, 3296–323, (2004).
[45] M. Wagner, J. Meller, R. Elber, Large-scale linear programming techniques for the design of protein folding potentials, Mathematical Programming B, 101, 301–318, (2004).
[46] David J. Wales and Harals A. Scheraga, Global Optimization of Clusters, Crystals, and Biomolecules,
Science, 285, 1368-1372, (1999).
[47] D. J.Wales, Energy Landscapes with Applications to Clusters, Biomolecules and Glasses, Cambridge University Press, Cambridge, (2003).
[48] D. J. Wales and J. P. K. Doye, Global optimization by basin-hopping and the lowest energy structures of Lennard-Jones clusters containing up to 110 atoms, J. Phys. Chem.
A, 101, 5111–5116, (1997).[49] Williams G.A., Dugan J.M.,
Altman R.B., Constrained global optimization for estimating molecular structure from atomic distances, J.Comp.Biol., 8, 523-547 (2001)
[50] Xiang Y., Cheng L., Cai W., Shao X., Structural distribution of Lennard-Jones clusters containing 562 to 1000 atoms, J. Phys. Chem. A,
108, 9516-9520 (2004)[51] G. L. Xue, Improvements
on the Northby Algorithm for molecular conformation: Better solutions, Journal of Global Optimization, 4, 425–440 (1994).
[52] Al Zimmermann’s Circle Packing Contest, www.recmath.org/contest/CirclePacking, 2006.
WOSP2007By Tom Luo, University of Minnesota Shuzhong Zhang, The Chinese University of Hong Kong
A first of its kind workshop on Optimization and Signal Processing (WOSP2007) was recently held on the campus of the Chinese University of Hong Kong (CUHK) during the period December 19 - 21, 2007. With financial support from the Department of Systems Engineering and Engineering Management, The Shun Hing Institute of Advanced Engineering at CUHK, and the Huawei Technologies Ltd., the workshop has brought together some of the world’s leading experts from both signal processing and the optimization communities, as well as technical representatives from leading information technology industry. It provided a valuable forum for the algorithm developers and engineering practitioners to share research ideas and identify important topics of future research. In the past thirty years, the work-horse algorithms in the field of digital signal processing and communication have been the gradient descent and the least squares algorithms. While these algorithms have served their purpose well, they suffer from slow convergence and sensitivity to the algorithm initialization and stepsize selection, especially when applied to ill-conditioned or nonconvex problem formulations. This is unfortunate since many design and implementation problems in signal processing and digital communication naturally lead to nonconvex optimization formulations, the solution of which by the gradient descent algorithm usually works poorly. Moreover, some applications require real-time implementation in DSP chips or large scale deployment across a distributed network. Simply put, the need for efficient and robust optimization algorithms is greater than ever in the field of signal processing and communications.
In recent years, the field of optimization has witnessed a significant surge in the research of interior point methods and convex conic optimization. A set of extremely powerful algorithms and highly reliable software packages have been developed. This
on-going work has substantially enlarged the set of signal processing problems that can be reliably solved in an efficient manner. For the optimization community, signal processing provides a rich source of application problems to which the advanced optimization knowledge and algorithms can bring a strong and immediate impact. Some of the signals processing problems have led to significant theoretical advances in optimization. Through close collaboration with researchers from signal processing, optimizers can help recognizing and solving convex problem formulations; utilizing the theory of convex optimization to characterize and gain insight into the optimal solution structure and to derive bounds on performance; deriving convex relaxations of hard, non-convex problems; and developing powerful general purpose or application-driven specific algorithms, including those that enable large scale optimization by exploiting the problem structure.
The goal of WOSP2007 was to promote this burgeoning field of interdisciplinary research. This small workshop has attracted 187 registered participants; most of them are graduate students from various universities of Hong Kong. This plus a delegation of 20 technical representatives from Huawei Technologies Ltd located in Shenzhen, as well as many non-registered participants, created a large audience that easily exceeded the maximum seating capacity (245) of the lecture theatre. Some participants had to stand or sat on the floor to listen to the talks. The technical program consisted of tutorial lectures as well as in-depth technical presentations showcasing the success of applications of optimization in signal processing. The lecture materials, including the slides of the presentations, can be found in the website of the workshop: www.se.cuhk.edu.hk/~zhang/WOSP2007/program.html

O P t I m A 7 6 March 2008 page 10
A Celebration of 50 Years of Integer ProgrammingJon LeeIBM T.J. Watson Research CenterYorktown Heights, New York, USA
e-mail: [email protected]
The year 2008 marks the fiftieth anniversary of the birth of integer programming. Naturally, you are now wondering what seminal event occurred in 1958 that we now refer to as the birth of the subject. During that year, Dr. Ralph E. Gomory devised and published a short paper [26] that really set the field of integer programming in motion. In case you follow mathematical programming only very casually, in that paper Gomory described his cutting-plane algorithm for pure integer programs, and he announced that the method could be refined to give a finite algorithm for integer programming. A published proof of his finiteness result is contained in [32]. Gomory gave a cutting-plane algorithm for the mixed integer problem [29], and this approach was only shown to be quite effective many years later [2]. It is interesting to note that now, half a century after they were first introduced, even Gomory’s finite cutting-plane method for the pure integer case is being re-examined and is showing new promise [5].To commemorate this occasion, on 7 January 2008 a special workshop was held at Centre Paul Langevin, Aussois, France. This special workshop was part of the 12th Combinatorial Optimization Workshop, 7–11 January 2008, which is held each year at Aussois. It is fair to say that the Aussois workshop is the yearly event for presenting and keeping up with the latest developments in integer programming and combinatorial optimization coming from the operations research community. In light of this, it was natural for the celebration of fifty years of integer programming to be staged as part of an Aussois workshop.
Before getting into the specifics of the workshop, some brief words about the venue are in order. Centre Paul Langevin is located at Aussois, a small Savoyardvillage type ski resort in the French Alps close to the Italian border. It is situated in the Maurienne valley, at the gateway of the Vanoise National Park, starting from 1500m of altitude (to 2750m high). Besides providing a measure of isolation, which helps make for a good workshop, on the occasion that participants need a short diversion from the mathematics, there are opportunities for skiing and snowboarding (a passion of the present author!).
The center has a conference room with 196 seats, enough lodging for most participants, and dining facilities. The center is named for Paul Langevin (born 23 January 1872), who was a prominent French physicist. Besides his scientific activities, Langevin was a founder of the Comité de vigilance des intellectuels antifascistes, and he was also president of the Ligue des droits de l’homme (Human Rights League) from 1944 to 1946. He died in Paris on 19 December 1946, two years after living to see the Liberation of Paris. Langevin was buried at the Panthéon (in Paris).
The organizers of the workshop were: Michael Jünger (Universität zu Köln), Thomas Liebling (École Polytechnique Fédérale de Lausanne), Denis Naddef (Ecole Nationale Supriéure d’Informatique et de Mathématiques Appliquées de Grenoble), William Pulleyblank (IBM Corporation), Gerhard Reinelt (Universit¨at Heidelberg), Giovanni Rinaldi (Istituto di Analisi dei Sistemi ed Informatica, Roma), and Laurence Wolsey (Université catholique de Louvain). Already one can see that the organizers themselves are leaders in the subject, providing some of the leading work over the course of a few decades, spanning such key areas as polyhedral combinatorics, branch and

O P t I m A 7 6 March 2008 page 11
Alan J. Hoffman, Harold Kuhn and Ailsa H. Land were also invited to be panelists, but unfortunately they were not able to attend. Susan Powell was kind enough to deliver some remarks on behalf of Land.
Egon Balas is University Professor of Industrial Administration and Applied Mathematics and the Thomas Lord Professor of Operations Research at Carnegie Mellon University. He was awarded the John von Neumann Theory Prize (INFORMS) in 1995. Some of the fundamental work of Balas includes implicit enumeration [35] and disjunctive programming [1]. Much more about him can be found in [20].
Michel Balinski is a Directeur de Recherche (émérite), CNRS, École Polytechnique, Paris. He was founding Editor-in-Chief of the journal Mathematical Programming and participated in founding the Mathematical Programming Society. Balinski was awarded a Lester R. Ford Award (Mathematical Association of America) in 1976 for his paper [3]. He is well known for his work on routing, apportionment and voting, and set partitioning approaches.
Jack Edmonds was a professor in the Department of Combinatorics and Optimization at the University of
cut, matching, the TSP, lot sizing, and computational integer programming.
The workshop began after lunch, with a session, chaired by Tom Liebling, of invited survey talks on some themes in integer programming that have withstood the test of time. In this session, there were talks by Gérard Cornuéjols (“Polyhedral Approaches to Mixed Integer Linear Programming”), Bill Cook (“50+ Years of Combinatorial Integer Programming”), and Laurence Wolsey (“Decomposition and Reformulation in Integer Programming”).
In the early evening, George Nemhauser led us through the history of the first twenty years of integer programming, walking us through a list of milestone papers in that time period. Nemhauser kindly agreed to allow us to reprint that list here (see references [23]–[61]). Of course such a list is subjective and will inevitably suffer from some omissions, but all of us interested in the field would be well served by studying these papers. Further information regarding the early days of integer programming and associated topics can be found in [16] and [22].
Nemhauser took 1954 as his starting point, highlighting both the seminal paper
of G.B. Dantzig, D.R. Fulkerson and S. Johnson [23] on cutting planes for the TSP and the fact that counting is hard (even for integer programmers). It is noteworthy that Gomory acknowledged in [26] the influence of [23] and [17] on his work:
“The algorithm closely resembles the procedures already used by Dantzig, Fulkerson and Johnson, and Markowitz and Manne to obtain solutions to discrete variable programming problems. Their procedure is essentially this. Given the linear program, first maximize the objective function using the simplex method, then examine the solution. If the solution is not in integers, ingenuity is used to formulate a new constraint that can be shown to be satisfied by the still unknown integer solution but not by the noninteger solution already attained.... What has been needed to transform this procedure into an algorithm is a systematic method for generating the new constraints.”
Nemhauser’s review nicely set up a panel session, led by Bill Pulleyblank, with six of the pioneers who have been so influential, especially during that early period. The panelists were: Egon Balas, Michel Balinski, Jack Edmonds, Arthur M. Geoffrion, Ralph E. Gomory and Richard M. Karp.
Left - Right: Balinski, Gomory, Karp

O P t I m A 7 6 March 2008 page 12
Waterloo, Ontario, from 1969. He retired from that position in 1999. Edmonds was awarded the John von Neumann Theory Prize (INFORMS) in 1985. Edmonds began his fundamental work at the National Bureau of Standards. He is particularly well known for his contributions to polyhedral combinatorics [39], branchings [44], matroids [51], matching [38], flows [4] and the notion of polynomial time [38]. For more details on Edmonds’ illustrious career, see [14].
Arthur M. Geoffrion is the James A. Collins Professor of Management Emeritus at the UCLA Anderson School of Management, Los Angeles. In 2000 he was awarded the George E. Kimball Medal, for service to INFORMS and to the profession of operations research. Geoffrion is well known for his contributions to implicit enumeration [45] and to decomposition schemes and their connections to Lagrangian duality [42, 55]. In 1978 Geoffrion co-founded INSIGHT, Inc., a management consulting firm specializing in optimization-based applications in supply-chain management and production planning. In 1982 he founded what has become the INFORMS Roundtable.
Ralph E. Gomory is President Emeritus of the Sloan Foundation, which he led 1989-2008. Before that, Gomory spent nineteeen years at IBM, beginning in the summer of 1959. He was named IBM Fellow in 1964, Director of the Mathematical Sciences
Department in 1965, and IBM Director of Research in 1970, a position which he held until 1986. Gomory became IBM Vice President in 1973 and Senior Vice President in 1985. In 1986 he was named IBM Senior Vice President for Science and Technology, retiring in 1989. Gomory was awarded the Frederick W. Lanchester Prize (INFORMS) in 1963, the John von Neumann Theory Prize (INFORMS) in 1984, and the National Medal of Science (by the President of the United States) in 1988. In addition to his work on cutting-plane methods and also corner polyhedra [10, 11, 12], Gomory also made fundamental contributions to column generation [6, 7] and to the concept of providing a structure that solves many closely related instances of an optimization problem [9]. Much more on Gomory’s career can be found in [13].
Alan J. Hoffman is a Fellow Emeritus of IBM Research. He has been a Member of the National Academy of Sciences since 1982 and was awarded the John von Neumann Theory Prize (INFORMS) in 1992. Hoffman has made fundamental contributions to the theory of total unimodularity [24], polyhedral combinatorics and our understanding of greedy algorithm; [18] and [21] provide wonderful opportunities to find out much more about the man and his work.
Richard M. Karp is the Class of 1939 Chair and University Professor at the University of California at Berkeley. In
addition, he is a Research Scientist at the International Computer Science Institute at Berkeley. Karp was awarded the Frederick W. Lanchester Prize (INFORMS) in 1977, the Delbert Ray Fulkerson Prize in (AMS and MPS) in 1979, the Turing Award (ACM) in 1985, the John von Neumann Theory Prize (INFORMS) in 1990, and the National Medal of Science in 1996. Karp’s work that relates to integer programming includes Lagrangian duality, subgradient optimization and the TSP [49, 53], reducibility of combinatorial problems [56], and efficient algorithms for network-flow problems [4].
Harold W. Kuhn is a Professor Emeritus of Mathematics at Princeton University. He was awarded the John von Neumann Theory Prize (INFORMS) in 1980. He is particularly well known for his contributions to game theory and to nonlinear programming, and for the Hungarian method for the assignment problem [15]. More information about Kuhn can be found in [19].
Ailsa H. Land and Alison G. Doig proposed in 1957 and published in 1960 [28] what is considered the origin of branch and bound as a general technique. Land is Professor Emeritus of Operational Research at the London School of Economics.
Many of the panelists noted the strong support, in the early days, of the Rand Corporation and Princeton University.
Left - Right: Edmonds, Karp Geoffrion Balas

O P t I m A 7 6 March 2008 page 13
References[1] E. Balas (1974). Disjunctive
programming: properties of the convex hull of feasible points. MSRR No. 348, Carnegie Mellon University, July. Also 1998, Discrete Applied Mathematics 89, 144.
[2] E. Balas, S. Ceria, G. Cornu ejols and N. Natraj (1996). Gomory cuts revisited, Operations Research Letters 19, 1–9.
[3] M. Balinski and H.P. Young (1975). The quota method of apportionment, Amer. Math. Monthly 82, 701–730.
[4] J. Edmonds and R.M. Karp (1972). Theoretical improvements in algorithmic efficiency for network flow problems”. Journal of the ACM 19 (2), 248–264.
[5] E. Balas, M. Fischetti and A. Zanette (2008). “Looking inside Gomory,” presented
at the 12th Combinatorial Optimization Workshop, 7–11 January 2008, Aussois, France.
[6] P.C. Gilmore and R.E. Gomory (1961). A linear programming approach to the cutting stock problem — Part I, Operations Research 9, 849–859.
[7] P.C. Gilmore and R.E. Gomory (1963). A linear programming approach to the cutting stock problem — Part II, Operations Research 11, 863–888.
[8] R.E. Gomory (1960). Solving linear programming problems in integers, Combinatorial Analysis (R.E. Bellman and M. Hall, Jr. eds, American Mathematical Society), 211–216.
[9] R.E. Gomory and T.C. Hu (1961). Multi-terminal network flows, J. Soc. Indust.
Appl. Math. 9(4), 551–570.[10] R.E. Gomory (1965). On the
relations between integer and noninteger solutions to linear programs. Proceedings of the National Academy of Sciences of the United States of America, 53, 260-265.
[11] R.E. Gomory (1967). Faces of an integer polyhedron. Proceedings of the National Academy of Sciences of the United States of America, 57, 16-18.
[12] R.E. Gomory (1969). Some polyhedra related to combinatorial problems. Linear Algebra and its Applications 2, 451-558.
[13] E.L. Johnson (2005). IFORS’ Operational Research Hall of Fame Ralph E. Gomory, International Transactions In Operational Research 12, 539-543.
[14] M. Jünger, G. Reinelt and G. Rinaldi, eds. (2003). Combinatorial Optimization - Eureka, You Shrink! Lecture Notes In Computer Science 2570, Springer-Verlag.
[15] H.W. Kuhn (1955). The Hungarian method for the assignment problem, Naval Research Logistics Quarterly 2, 83-87.
[16] J.K. Lenstra, A.H.G. Rinnooy Kan and A. Schrijver, eds. (1991). History of Mathematical Programming: A Collection of Personal Reminiscences. North-Holland.
[17] H.M. Markowitz and A.S. Manne (1957). On the solution of discrete programming problems, Econometrica 25.
[18] C. Micchelli, ed. (2003). Selected Papers of Alan
As a result of the Cold War, Government funding was quite high for science and mathematics, so there were ample resources to support optimization. Many of the panelists told how the influence of George Dantzig, Ray Fulkerson, Alan Goldman, Alan Hoffman and Alan Tucker should not be underestimated. For some, the passion came from the beauty of what they were investigating, for others the applications and the associated drive to make a difference were motivating factors.
After a long day of listening, we reached our fill of food for thought, and the evening concluded with a banquet.
From Tuesday through Friday, the workshop was run on its traditional model. That is, there were no parallel sessions, and the program was made during the meeting. As usual, there were two morning sessions and one late afternoon session to leave time in the afternoon for “collaboration” (broadly defined to include joint efforts at: proving theorems, enjoying the beautiful landscape, and skiing and snowboarding).
On Tuesday, the program was completely filled with talks concerning cutting planes. Some highlights included: Ralph Gomory (“40 Years of Corner Polyhedra”), Matteo Fischetti (“Looking inside Gomory”) and Jean-Philippe Richard (“Group Relaxations for Integer Programming”). A bit tiring for those of us with a short attention span, but ample testimony to the fact that the subject remains a hot area even after fifty years.
On Wednesday, topics included some very exciting and less traditional topics whose computational value is only just now being well explored. For example: François Margot (“Symmetry in Integer Programming”), Franz Rendl (“Semidefinite Relaxations for Integer Programming”) and Kurt Anstreicher (“A Computable Characterization of the Convex Hull of Low-Dimensional Quadratic Forms”).
On Thursday, some highlights included two very different aspects of issues
concerning nonlinearity and discrete choices: Robert Weismantel (“Nonlinear Integer Programming”) and Michel Balinski (“The Majority Judgement”).
Friday’s program included excellent talks, rewarding those who could stay for the full week. For example: Fritz Eisenbrand (“Integer Programming and Number Theory”) Richard Karp (“How Hard are the NP-hard Problems?”), Andrea Lodi (“Computation in Integer Programming”) and Tom McCormick (“Strongly Polynomial Algorithms for Bi-Submodular Minimization”).
The workshop was generously sponsored by ADONET —Algorithmic Discrete Optimization Network (a Marie Curie Research Training Network of the European Union), ALMA, ILOG, IBM and Springer Verlag.

page 14March 2008O P t I m A 7 6
Hoffman, with commentary, World Scientific Publishing Company, Singapore.
[19] G. Owen (2004). IFORS’ Operational Research Hall of Fame Harold W. Kuhn International Transactions in Operational Research 11, 715-718.
[20] G.K. Rand (2006). IFORS Operational Research Hall of Fame Egon Balas, International Transactions In Operational Research 13, 169-174.
[21] U.G. Rothblum (1989), Alan J. Hoffman - Biography, Linear Algebra and Its Applications 114/115, 1–16.
[22] K. Spielberg and M. Guignard-Spielberg, eds. (2007). History of Integer Programming: Distinguished Personal Notes ad Reminiscences, Annals of Operations Research 149.
20 YEARS OF mIP mILEStONES (1954-1973) (Compiled by George L. Nemhauser)[23] G.B. Dantzig, D.R. Fulkerson
and S. Johnson (1954). Solution of a large scale traveling salesman problem, Operations Research 2, 393–410.
[24] A.J. Hoffman and J.B. Kruskal (1956). Integral boundary points of convex polyhedra. linear inequalities and related systems, H.W. Kuhn and A.J. Tucker eds. Princeton University Press, 223–246.
[25] G.B. Dantzig (1957). Discrete variable extremum problems, Operations Research 5, 266–277.
[26] R.E. Gomory (1958). Outline of an algorithm for integer solutions to linear programs, Bull. of the American Mathematical Society 64, 275–278.
[27] G.B. Dantzig (1960). On the significance of solving linear programs with some integer variables, Econometrica 28, 30– 34.
[28] A.B. Land and A.G. Doig (1960). An automatic method for solving discrete programming problems, Econometrica 28, 497–520.
[29] R.E. Gomory (1960). An algorithm for the mixed integer problem, RM-2597, The Rand Corporation.
[30] J.F. Benders (1962). Partitioning procedures for solving mixed variables programming problems, Numerische Mathematik 4, 238–252.
[31] H. Everett III (1963). Generalized lagrange multiplier method for solving problems of optimal allocation of resources, Operations Research 11, 399–417.
[32] R.E. Gomory (1963). An algorithm for integer solutions to linear programs. Recent Advances in Mathematical Programming, R. L. Graves, P. Wolfe, eds. McGraw-Hill, 269-302.
[33] J.D.C. Little, K.G. Murty, D.W. Sweeney and C. Karel (1963). An algorithm for the traveling salesman problem. Operations Research 11, 972–989.
[34] M. Balinski and R. Quandt (1964). On an integer program for a delivery problem, Operations Research 12, 300–304.
[35] E. Balas (1965). An additive algorithm for solving linear programs with zeroone variables. Operations Research 13, 517-546.
[36] M. Balinski (1965). Integer programming: methods, uses, computation, Management Science 12, 253–313.
[37] R.J. Dakin (1965). A tree-search algorithm for mixed integer programming problems, The Computer Journal 8, 250–254.
[38] J. Edmonds (1965). Paths, trees, and flowers, Canad. J. Math. 17, 449–467.
[39] J. Edmonds (1965). Maximum matching and a polyhedron with 0,1-vertices, J. Res. Nat. Bur. Standards 69B, 125–130.
[40] R.E. Gomory (1965). On the relation between integer and noninteger solutions to linear programs, Proc. Nat. Acad. Sci. 53, 260-263.
[41] R.D. Young (1965). A primal (all integer) integer programming algorithm, J. of Res. Nat. Bur. Stds. 69B, 213–250.
[42] R. Brooks and A.M. Geoffrion (1966). Finding Everetts lagrange multipliers by linear programming, Operations Research 14, 1149–1153.
[43] P.C. Gilmore and R.E. Gomory (1966). The theory and computation of knapsack functions, Operations Research 14, 1045–1074.
[44] J. Edmonds (1967). Optimum branchings, Journal of Research of the National Bureau of Standards 71B, 233–240.
[45] A.M. Geoffrion (1969). An improved implicit enumeration approach for integer programming, Operations Research 17, 437–454.
[46] R.E. Gomory (1969). Some polyhedra related to combinatorial problems, Linear Algebra Appl. 2, 451-558.
[47] E.M.L. Beale and J. Tomlin (1970). Special facilities for nonconvex problems using ordered sets of variables. Proceedings of the 5th International Conference on Operational Research, J. Lawrence ed. Tavistock Publications, 447–454.
[48] D.R. Fulkerson (1970). The perfect graph conjecture and pluperfect graph theorem. Proceedings of the Second Chapel Hill Conference on Combinatorial Mathematics and its Applications,
R.C. Bose et al. eds. University of North Carolina Press, 171–175.
[49] M. Held and R.M. Karp (1970). The traveling salesman problem and minimum spanning trees, Operations Research 18, 1138–1162.
[50] E. Balas. Intersection Cuts A new type of cutting plane for integer programming, Operations Research 19, 19–39.
[51] J. Edmonds (1971). Matroids and the greedy algorithm, Mathematical Programming 1, 125-136.
[52] D.R. Fulkerson (1971). Blocking and antiblocking pairs of polyhedra, Mathematical Programming 1, 168–194.
[53] M. Held and R.M. Karp (1971). The traveling salesman problem and minimum spanning trees: Part II, Mathematical Programming 1, 6–25.
[54] R.S. Garfinkel and G.L. Nemhauser (1972). Integer Programming, Wiley.
[55] A.M. Geoffrion (1972). Generalized benders decomposition, J. of Optimization Theory and Appl. 10, 237–260.
[56] R.M. Karp (1972). Reducibility among combinatorial problems. Complexity of Computer Computations, R.E. Miller and J.W. Thatcher eds. Plenum Press 85–103.
[57] L. Lovasz (1972). Normal hypergraphs and the perfect graph conjecture, Discrete Mathematics 2, 253–267.
[58] V. Chvatal (1973). Edmonds polytopes and a hierarchy of combinatorial problems, Discrete Mathematics 4, 305–337.
[59] J. Edmonds and E.L. Johnson (1973). Matching, Euler tours and the chinese postman, Mathematical Programming 5, 88– 124.
[60] S. Lin and B.W. Kernighan (1973). An effective heuristic algorithm for the traveling salesman problem, Operations Research 21, 498–516.
[61] M.W. Padberg (1973). On the facial structure of set packing polyhedra, Mathematical Programming 5, 199–215.
IBM T.J. Watson Research Center
e-mail address: [email protected]

O P t I m A 7 6 March 2008 page 15
application for Membership
I wish to enroll as a member of the Society.My subscription is for my personal use and not for the benefit of any library or institution.c I will pay my membership dues on receipt of your invoice.c I wish to pay by credit card (Master/Euro or Visa).
credit card no. expiration date
family name
mailing address
telephone no. telefax no.
signature
Mail to:Mathematical Programming Society 3600 University City Sciences Center Philadelphia, PA 19104-2688 USA
Cheques or money orders should be made payable to The Mathematical Programming Society, Inc. Dues for 2008, including subscription to the journal Mathematical Programming, are US $85. Retired are $40. Student applications: Dues are $20. Have a faculty member verify your student status and send application with dues to above address.
Faculty verifying status
Institution
MPS Chair’s Column Steve Wright17 February 2008
It’s a pleasure to contribute my second column to Optima and an even greater pleasure to see our society’s newsletter back on a regular production schedule. We are much obliged to Andrea Lodi and the editorial and publishing teams for making this happen. This issue of Optima contains an article by Jon Lee on the 2008 Aussois workshop, which included a commemoration of the 50th anniversary of the publication of Ralph E. Gomory’s 1958 paper that founded the area of integer programming. Jon’s article makes clear that integer programming remains a thriving field, with many of the founders remaining actively engaged in research alongside extremely talented younger generations.
I note with sadness the passing of two individuals who meant a great deal to our community. Alex Orden, who was Chair of MPS in 1983-86 and a founding council member of the society, passed away in Chicago on 9 February 2008. Alex was renowned for his work on linear programming, in particular, as co-author with Dantzig and Wolfe of the paper on the generalized simplex method and as the
inventor of the product-form inverse of the basis matrix. Gene H. Golub of Stanford University died on 16 November 2007 after a short illness. Gene was a giant of numerical analysis and scientific computing, and his research laid important foundations for numerical optimization. Even more importantly, in both his leadership capacities and personal life, he was a great supporter of the optimization community and of many individual optimization researchers.
I salute our former Chair Rolf Moehring, who celebrated his 60th birthday on 16 February 2008. The occasion was marked by a symposium organized by his colleagues in Berlin. Rolf continues to work hard on behalf of MPS by heading an ad hoc membership committee whose charge is to find new ways for the society to serve its members and the optimization community. With the vast changes to the academic landscape brought on by electronic publishing, and with the increasing size and diversity of our own research community, it is time for us to step back and think hard about how MPS should adapt and evolve. Our membership stands at 1150, a record
level, due in large part to new members who joined through their participation in the most recent ISMP and ICCOPT meetings. Part of our challenge is to serve these new members well enough that they will renew in future years! If you have any suggestions concerning services that you would like to see MPS provide, or new roles that we should be playing, please contact Rolf or myself. And please, if you have not already done so, renew your MPS membership for 2008!
Finally, I draw your attention to provisions in the society’s by-laws (posted on our web site mathprog.org) about the establishment of regional and technical sections of MPS. If you and a group of like-minded optimization colleagues see benefits in organizing yourselves, possibly with a view to holding regional meetings or topical conferences, or to establishing a web-based community around some interest area, feel free to consult with us about the possibility of MPS affiliation. The arrangements outlined in our by-laws are quite flexible.
4

O P t I m A 7 6 March 2008 page 16
Nominations are solicited for the George B. Dantzig Prize, administered jointly by the Mathematical Programming Society (MPS) and the Society for Industrial and Applied Mathematics (SIAM). This prize is awarded to one or more individuals for original research which by its originality, breadth and depth, is having a major impact on the field of mathematical programming. The contribution(s) for which the award is made must be publicly available and may belong to any aspect of mathematical programming in its broadest sense. Preference will be given to candidates who have not reached their 50th birthday in the year of the award.
The prize will be presented at the 2009 International Symposium on Mathematical Programming, to be held August 23-28, 2009, in Chicago, Illinois, U.S.A. Past prize recipients are listed on the MPS Web site. The members of the prize committee are Jong-Shi Pang (Chair), Yuri Nesterov, Alexander Schrijver, and Eva Tardos.
Nominations should consist of a letter describing the nominee’s qualifications for the prize, and a current curriculum vitae of the nominee including a list of publications. They should be sent to
Jong-Shi Pang
Department of Industrial and Enterprise Systems Engineering
University of Illinois at Urbaba-Champaign
117 Transportation Building MC-238
104 S. Mathews Ave.
Urbana Illinois 61801
U.S.A.
e-mail: [email protected]
and received by 15 November 2008. Submission of nomination materials in electronic form is strongly encouraged.
Call for nomination of the 2009 George B. Dantzig Prize in Mathematical Programming

O P t I m A 7 6 March 2008 page 17
minimization. The danger of assuming a growth sequence (i.e. extrapolating from known global minima to predict those of larger clusters) is pointed out, but it is also shown that biasing can be used in a positive sense by modifying the energy or “penalty” function (deforming the landscape) to include a geometrical term in order to direct the optimization towards structures with a certain desired packing arrangement or overall shape.
The efficiency of population-based search methods (such as Genetic Algorithms, and parallel tempering) is due to the parallel exploration of the configuration landscape. Locatelli and Shoen show that these methods are most successful when coupled with the use of dissimilarity measures, so as to ensure (or at least encourage) exploration of diverse regions of the landscape. The process of “direct mutation”, which involves more deterministic permutations, perhaps utilising prior knowledge about the system, can also be used within a population-based search method to move (ideally) towards the global minimum. The Dynamic Lattice Searching method (wherein high energy atoms in the clusters are preferentially moved) is one such example of this approach.
In conclusion, I believe that Locatelli and Schoen have presented a concise yet informative introduction to the field of structure prediction as an exercise in global optimization, along with recent techniques for understanding and improving the optimization procedure. Applications of many of these methods to other problems are already widespread and likely to grow considerably in the future. In their final section, by way of an example, the authors show that their approach has been very successfully applied to the 2-D disk packing problem.
Global optimization is of undoubted and increasing importance in most areas of science and engineering. The problem of global optimization – the determination of the absolute maximum or minimum of a function (or indeed a process) depending on a large number of variables – is very difficult, even for discrete integer-valued problems, let alone for continuous, real-valued problems. Global optimization can be regarded as the process of searching a multi-dimensional landscape for the highest “mountain peaks” or lowest “valley bottoms”. While this does not present too many problems in the everyday 3-dimensional world in which we live, in the higher dimensions (i.e. number of variables) commonly encountered in important scientific and engineering problems, the situation is far harder. Thus, apart from the cases of simple convex mathematical functions, or discrete problems small enough to be grid searched (or for which a branch-and-bound search tree-pruning algorithm can be applied), one can never be certain that the lowest (or highest) value that is found is really the global optimum. This is to be contrasted with the certainty with which we can locate and identify local minima and maxima, utilising (either analytical or numerical) gradients and curvatures of the function in question.
Over the past 30 years or so, many approaches have been developed to increase the likelihood of finding global optima, including techniques such as simulated annealing, Monte Carlo methods (e.g. the Basin Hopping approach) and the growing class of Evolutionary Algorithms (e.g. Genetic Algorithms). Of course, the “No free lunch theorem” ensures that while certain methods may be particularly good
for certain classes of problems, no one approach is guaranteed to work in every application.
In the article “Structure prediction and global optimization”, Locatelli and Shoen describe the application of global optimization to several problems, taken from chemistry and biology, involving the prediction of structure: finding the minimum energy configuration of a cluster (or nanoparticle) composed of atoms or molecules; determining the lowest energy folded conformation of a model protein molecule; and the docking of protein molecules. In these cases, the inter-atomic interactions are described by quite simple potential energy functions, which, nevertheless, reproduce essential aspects of the underlying physics. The difficulty in finding the global mimimum energy arises due to the high dimensionality of the problem (for example, the number of variables for an N-atom cluster is 3N, corresponding to the Cartesian coordinates of all the component atoms) and the consequent very high number of possible configurations (local minima).
As well as providing an important survey and bibliography of applications of global optimization to the cluster optimization problem (which they concentrate on), Locatelli and Shoen describe a number of approaches and algorithms which they (among others) have employed to improve the success rate and efficiency of global optimization techniques. For example, the recognition of funnel-like features on energy landscapes is used to rationalise the differences between certain clusters whose (putative) global minima are easy to find with those which are far more difficult to find. Consideration of the energy landscape also explains the relatively high success of methods, such as Basin Hopping and hybrid Genetic Algorithms which incorporate local *School of Chemistry, University of
Birmingham,Edgbaston, Birmingham B15 2tt,United Kingdom
Discussion columnCommentary on “Structure prediction and global optimization” by *Roy L. Johnston

O P t I m A 7 6 March 2008 page 18
International School of mathematics “G. Stampacchia”
Erice - Sicily, Italy48st Workshop: Nonsmooth Analysis, Optimization and Applications May 9 - 17, 2008 Lecture-Hall: San Rocco
Sponsored by the:– Italian Ministry of University
and Scientific Research– Sicilian Regional Government– University of Calabria– Centro “Enrico Fermi”– Italian National Research Council,
Institute of High Performance – Computing and Networking,
Rende (CS)
Ettore Majorana Centre for Scientific Culture
PURPOSE OF tHE WORKSHOPThe need of providing satisfactory answers to several questions posed by diverse advanced application fields, basically in Engineering, Mechanics and Economics, has been the strongest motivation to tackle mathematical problems where differentiability of the involved functions is no longer guaranteed. Nonsmooth Analysis has then grown considerably and it is now a well established area of modern Mathematics. The main battlefield, where the theoretical findings of Nonsmooth Analysis are tested, is the design of effective algorithms for solving a wide range of optimisation problems. Starting from the pioneering works in the Sixties on the minmax problems, several application fields have benefited from the development of Nonsmooth Analysis. We list here the study of large scale programming problems via decomposition techniques, the Lagrangian relaxation of integer extremum problems, the numerical solution of variational inequalities, the extremum problems with equilibrium constraints, several classification and approximation problems, structural design, nonsmooth mechanics, etc. The aim of the Workshop is to bring together people working on both sides of Nonsmooth Analysis and Optimization and Applications to discuss the state-of-the-art and the possible future developments. Some tutorials will also be given to encourage young scientists to approach such an exciting research area. The Workshop is dedicated to Vladimir F. Demyanov, on the occasion of his 70th birthday.
LOCAtIONThe workshop will be held in Erice, Sicily, Italy at the “E. Majorana” Centre for Scientific Culture. The Centre is located in the pre-mediaeval city of Erice and the lecture halls are located in two restored monasteries and the ancient Palazzo Ventimiglia - former residence of Viceroys of Sicily.
APPLICAtIONSPersons wishing to attend the Workshop and possibly to contribute a lecture should contact:
Professor Manlio GaudiosoD.E.I.S. - Università della CalabriaVia Pietro Bucci, Cubo 41C87036 Rende (CS), Italy.e-mail: [email protected]
Specifying:1. Data and place of birth, together
with present nationality;2. Affiliation;3. Address, e-mail address.
Young people with only limited experience should enclose a scientific curriculum vitae and a letter of recommendation from the head of their research group or from a senior person active in the field.Application by e-mail is strongly encouraged. Closing date for application: March 15, 2008. Participants are expected to arrive in Erice on May 9, no later than 5 p.m.
M. Gaudioso and D. PallaschkeDirectors of the Workshop
F. GiannessiDirector of the School
A. ZichichiDirector of the Centre
tOPICSNumerical methods for nonsmooth optimizationNonsmooth optimization and integer programmingNonsmooth dynamicsNonsmooth analysisLearning methods

O P t I m A 7 6 March 2008 page 19
Antonio FrangioniUniversità di Pisa, I
Masao FukushimaUniversity of Kyoto, J
Alexei GaivoronskiNorwegian University of Science and Technology, Trondheim, NO
Giorgio GiorgiUniversità di Pavia, I
Angelo GuerraggioUniversità dell’Insubria, I
Alexander IoffeTechnion, Haifa, IL
H.-Th. JongenRWTH Aachen University, D
Alexander KurzhanskiUniversity of California, Berkeley, USA
Juan Enrique Martinez LegazUniversitat Autònoma de Barcelona, E
Boris MordukhovichWayne State University, USA
Massimo PappalardoUniversità di Pisa, I
Panos PardalosUniversity of Florida, Gainesville, USA
J.P. PenotUniversity of Pau, F
R.T. RockafellarUniversity of Washington, USA
Stefan ScholtesUniversity of Cambridge, UK
Michel TheraUniversité de Limoges, F
Xiaoqi YangHong Kong Polytechnic University, PRC
Minmax problemsDecomposition methodsVariational inequalitiesOnline and incremental methodsNonsmooth mechanics
LECtURESThe workshop will consist of invited lectures and contributed lectures. Invited lecturers who have confirmed the participation are:
Adil BagirovUniversity of Ballarat, A
J.-P. CrouzeixUniversité Blaise Pascal, Clermont-Ferrand, F
Asen L. DontchevUniversity of Michigan, USA
Rosalind ElsterUniversitat Autònoma de Barcelona, E
Francisco FacchineiUniversità di Roma “La Sapienza”, I
continued
Ettore majorana Centre for Scientific Culture

EDITOR:Andrea LodiDEIS University of Bologna,Viale Risorgimento 2,I - 40136 Bologna, Italye-mail: [email protected]
CO-EDITORS:Alberto CapraraDEIS University of Bologna,Viale Risorgimento 2,I - 40136 Bologna, Italye-mail: [email protected]
Katya ScheinbergIBM T.J. Watson Research CenterPO Box 218Yorktown Heights, NY 10598, [email protected]
FOUNDING EDITOR:Donald W. Hearn
PUBLISHED BY THEMATHEMATICAL PROGRAMMING SOCIETY &
University of Florida
Journal contents are subject to change by the publisher.
FIRSt CLASS mAIL
O P t I m A
mathematical programming society
Center for Applied Optimization401 Weil HallPO Box 116595Gainesville, FL 32611-6595 USA





























