Embed Size (px)
DESCRIPTION
A Log-Euclidean Polyaffine Framework for Locally Rigid or Affine Registration. Vincent ARSIGNY. Why locally rigid or affine deformations?. Well-adapted to certain situations: histological slices [Pitiot, MedIA, 2005] articulated structures [Papademitris, Miccai’05] - PowerPoint PPT Presentation
Citation preview

A Log-Euclidean Polyaffine Framework for Locally Rigid or
Affine Registration
Vincent ARSIGNY.

2
Why locally rigid or affine deformations?
• Well-adapted to certain situations:
– histological slices [Pitiot, MedIA, 2005]– articulated structures [Papademitris, Miccai’05]
• After global alignment, allow finer registration with very smooth deformations. Alternatives:
– B-Splines [Rueckert, TMI, 99]– RBFs [Rohde, TMI, 2003]– Vortex particules [Cuzol, IPMI’05]– Etc.

March 6th, 2006 3
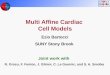
Example: Head and Neck
Reference image Resampled floating image
Images obtained with SuperBaloo algorithm. Thanks Olivier.

March 6th, 2006 4
Overview
1. Presentation
2. (Previous) Polyaffine framework
3. Log-Euclidean Polyaffine framework
4. 3D Registration Results

March 6th, 2006 5
Locally Rigid or AffineDeformations
• Parameters: N rigid or affine components where:
– : rigid or affine transformations– : weights, modeling spatial
influence/anchoring or components.
• Example:
(Ti ;wi )Ti = (M i ;ti )wi (x) > 0

March 6th, 2006 6
Locally Affine Deformations
• Direct fusion into global deformations(with normalized weights):
• Advange: simplicity, smoothness
• Drawback: non-invertibility in general
T(x) =P
i wi (x):Ti (x)

7
Polyaffine Framework
• Idea: use infinitesimal fusion,via integration of an ODE during 1 unit of time.
• How? In [Arsigny, MedIA,05], [Arsigny, Miccai’03]:
– Use logarithms of linear parts
– ODE: _x =P
i wi (x):(ti +log(M i )(x ¡ sti )) for s 2 [0;1]:
Vincent Arsigny, Xavier Pennec, and Nicholas Ayache. Polyrigid and Polyaffine Transformations: A Novel Geometrical Tool to Deal with Non-Rigid Deformations - Application to the registration of histological slices .
Medical Image Analysis, 9(6):507-523, December 2005.
M i

March 6th, 2006 8
Example: Mixing Two Rotations

March 6th, 2006 9
Examples

March 6th, 2006 10
Histology: Correction of Artifacts

March 6th, 2006 11
Registration Results

March 6th, 2006 12
Overview
1. Presentation
2. (Previous) Polyaffine framework
3. Log-Euclidean Polyaffine framework
4. 3D Registration Results

March 6th, 2006 13
Why a Novel Polyaffine Framework?
• Previous framework has severaldefects:
– Inverse of polyaffine transformation not polyaffine
– Fusion: depends on the coordinate system(not affine-invariant)
• ODE integration: high computational cost.

14
Log-Euclidean Framework
• Idea: use logarithms of transformations (vs. only linear parts previously)
• New polyaffine ODE (homog. coord.):
log(T) = logµM t0 1
¶
=
µL v0 0
¶:
_x = V(x) def=P
i wi (x) log(Ti ) :x
• Novel framework: [Arsigny,WBIR’06], INRIA research report pending.
Vincent Arsigny, Olivier Commowick, Xavier Pennec, and Nicholas Ayache. A Log-Euclidean Polyaffine Framework for Locally Rigid or Affine Registration. In Proc. of WBIR’06 (to appear).

March 6th, 2006 15
Log-Euclidean Framework
• Remarkable novel properties:– ODE is stationary (or autonomous)– Integration of ODE: yields
one-parameter subgroup of LEPTs– In particular: inverse (or square root):
is a LEPT with identical weights and inversed (or square rooted) transfos
– affine-invariance

March 6th, 2006 16
Log-Euclidean Framework
• Why called Log-Euclidean?– Based on logarithms of transfos– If weights do not depend on x:
Log-Euclidean mean of transfos:
– Properties: geometric interpolation of determinants, inverse-invariance.
T = exp(P
i wi log(Ti ))

March 6th, 2006 17
Fast Polyaffine Transform (FPT)
• Fast computation of LEPTs on regular grids possible, efficiency somehow comparable to FFT.
• Idea: generalize ‘Scaling and Squaring’method for matrix exponential.Basic property:
exp(M ) = exp( M2N)2N

March 6th, 2006 18
Fast Polyaffine Transform
• Integrating the ODE:
• Integration time-step doubles ateach interation.
Scaling Step: choose N, so that V(x)/2^N is close enough to zero (depending on accuracy desired).
Exponentiation step: compute deformations at time 1/2^N with a numerical scheme.
Squaring step: small deformations squared recursively N times (N compositions of mappings) to obtain the LEPT

March 6th, 2006 19
Fast Polyaffine Transform
Typical
example:

March 6th, 2006 20
Fast Polyaffine Transform
• Relative accuracy, 50x40 grid.
• When N varies,convergence toward:
– Average error: 0.2 %
– Error max: 2%

March 6th, 2006 21
Inversion with the FPT
Inversion of LEPTs:
Just compute FPT
with
inverted transfos.
Accuracy: 0.2%.

March 6th, 2006 22
Fast Polyaffine Transform
• In the following: used for post-processing of already estimated components.
• Interest:– Singularities removed (vs. direct fusion)– Fast computation of inverse – No artifact introduced in fusion

March 6th, 2006 23
Fast Polyaffine Transform
Direct fusionLEPT fusion

March 6th, 2006 24
Overview
1. Presentation
2. (Previous) Polyaffine framework
3. Log-Euclidean Polyaffine framework
4. 3D Registration Results

25
Robust Block-Matching Algorithm
Olivier Commowick, Vincent Arsigny, Jimena Costa, Nicholas Ayache, and Grégroire Malandain. An Efficient Locally Affine Framework for the Registration of Anatomical Structures. In Proc. of ISBI’06 (to appear).
² Presented in [Commowick, ISBI06]² a±ne/ rigid components chosen before registration² weight functions de ned viamasks of structures of interest² global a±nealignement ¯rst² two levels of resolution.² 10 block-matching iterations at each resolution² similarity criterion: local correlation ratio² components estimated with direct fusion, with weighted LTS² visco-elastic Log-Euclidean regularization step² post-processing: FPT (8 squarings) of transfo and inverse² typical CPU time: < 10minutes (8 components, 200x200x200 voxels)

March 6th, 2006 26
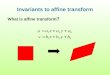
Example: Head and Neck
Reference image Resampled floating image

27
Brain Critical Structures Segmentation
• Method: – Atlas-to-Subject
registration– Affine component
areas defined on the atlas
– Apply transformation to contours

March 6th, 2006 28
Results on Brain Structures Segmentation

March 6th, 2006 29
Results on Brain Structures Segmentation
→ Comparable accuracy, locally affine much smoother.
Patient # 1 2 3 4 5 6Sensitivity ( Runa ) 0.88 0.86 0.84 0.79 0.85 0.78Speci¯city ( Runa ) 0.86 0.91 0.79 0.94 0.89 0.91Distance to (1,1) ( Runa ) 0.19 0.17 0.27 0.22 0.19 0.24Sensitivity ( MAF) 0.86 0.85 0.82 0.84 0.84 0.76Speci¯city ( MAF) 0.89 0.91 0.83 0.92 0.90 0.93Distance to (1,1) ( MAF) 0.18 0.17 0.25 0.18 0.19 0.25
Table 1: Registration results on brainstem with dense method (Runa)[Stephanescu, MedIA, 2005] and locally a±ne. Sensitivity and speci¯city ob-tained: STAPLE algorithm, with seven experts

March 6th, 2006 30
Conclusions
• Current locally-affine framework:– Well-adapted in a number of situations– Efficient estimation of local deformations
(vs. [Arsigny, MedIA,05])– Invertibility of global deformations and
intuitive properties of fusion:Log-Euclidean polyaffine framework
– Efficient computation of global transformation as well as inverse: FPT

31
• Estimation of geometry components:ideas of [Pitiot, MedIA,05] to integrate,necessary for histology in particular.
• Statistics on deformability in low-dimensional spaces (vs. dense deformations),easier to embed in registration?
• Locally rigid/affine deformations between global alignment and dense deformations?Goal: comparable or better accuracy with smoother deformations
Perspectives

Thank you for your
attention!
Any questions?