Embed Size (px)
Citation preview

NSC 2005 Conference Paper No.39
1
A Generic Reentry Trajectory Planning Algorithm for Reusable
Launch Vehicle Missions
Ashok Joshi *, K. Sivan
@
Indian Institute of Technology Bombay, Mumbai – 400 076, India
and
B. N. Suresh$, S. Savithri Amma
#
Vikram Sarabhai Space Centre, Thiruvananthapuram-695 022, India
ABSTRACT
A generic reentry guidance trajectory planning algorithm of a Reusable Launch Vehicle is
presented in this paper. The study is aimed at the development of a trajectory planning
algorithm, which is accurate, efficient, robust and reconfigurable. In order to achieve the
above objectives, the proposed reentry trajectory planning algorithm generates the optimum
reference trajectory from any reentry interface to a specific target location meeting all the
path constraints real time. The applicable optimal control problem of reentry guidance is
converted into an equivalent targeting problem in Nonlinear Programming and a simplified
solution methodology is devised to solve the three dimensional trajectory planning without
using bank reversals. The necessary mathematical models are represented in polar coordinate
system and a judicious selection of control parameters, coupled with an efficient method of
computation of sensitivity matrix elements, ensures better mission planning and faster
convergence. The performance results establish the mission flexibility of steering the vehicle
from widely separated reentry locations, while meeting the path constraints. The guidance
law and the models are general and adaptable to any RLV mission and have the potential for
onboard implementation.
Reentry, Guidance, Trajectory Planning, Heat Rate, Dynamic Pressure, Latitude,
Longitude, Target
NOMENCLATURE
DC , LC Drag and lift coefficients respectively
g Acceleration due to gravity
2J Second gravitational harmonics
LQR Linear Quadratic Regulator
m Vehicle mass
maxn Maximum allowable load factor
NLP Nonlinear Programming
maxq Maximum allowable dynamic pressure
___________________________________________________________________________
* Professor, Department of Aerospace Engineering @ Research Student, Department of Aerospace Engineering, Group Director, Mission
Synthesis & Simulation Group, Vikram Sarabhai Space Centre, Thiruvananthapuram $
Director # Engineer, Mission Synthesis & Simulation Group

NSC 2005 Conference Paper No.39
2
maxQ,Q && Heat rate and its maximum allowable value
r Radial distance
NR Nose radius
RLV Reusable Launch Vehicle
TAEM Terminal Area Energy Management
V Relative velocity
cirV Circular velocity
α Angle of attack
β Scale height
γ Flight path angle
λ Vehicle longitude
µ Gravitational constant,
ρ Atmospheric density
0ρ Sea level density
σ Bank angle
φ Vehicle latitude
ψ Relative yaw angle of the vehicle
eΩ Rotational velocity of Earth
1. INTRODUCTION
It has been established in literature that the atmospheric reentry of a Reusable Launch
Vehicle (RLV) is the most critical part of the overall return mission and therefore, reentry
guidance algorithm is an important component of the overall strategy for steering the vehicle
safely through the dispersed environment, while dissipating the large amount of energy and
meeting the mission requirements. Further, low cost operation of future RLVs and crew/cargo
return vehicles is strongly dependent on the availability of a re-configurable and robust
reentry guidance scheme. Reentry guidance strategy consists of two components: (1)
generation of a feasible reference trajectory to reach the specified target, satisfying all the
path constraints, (2) generation of steering commands, angle of attack and bank angle to track
the reference trajectory. The flight proven reentry guidance algorithms to date have been
implemented by storing onboard, pre-computed reference trajectory profile1,2
. This reference
trajectory profile is modified onboard, using sensor data, and is tracked using a control
system to meet the desired range requirements. In view of the above, the guidance algorithm
is required to be computationally efficient and the algorithm used for space shuttle missions
is considered to be not suitable for the new generation RLVs. This is mainly because of wide
dynamic range of operation and a need to have minimal aerodynamic characterization at
ground for such RLVs. Hence, recent studies in this context have focused on the
development of efficient and robust guidance algorithms.
These algorithms mainly address improvements such as nonlinear control laws to track the
reference trajectory profile, advanced linear control laws with least sensitivity to reference
trajectory, optimum method of updating reference profile onboard to increase reentry
capability and generation of reference trajectory onboard to add mission flexibility. In ref .3
and ref.4, feed back linearization and in ref.5 and ref.6, analytical parameter optimization
procedures are used to generate a reference drag acceleration profile. Another approach treats
the nonlinear trajectory tracking as a regulator problem about the reference trajectory7,8
,

NSC 2005 Conference Paper No.39
3
which requires no online integrations or iterations and needs only very few off-line parameter
adjustments. At the core of this method is a new closed form approximate receding-horizon
control law that guarantees closed loop stability when designed properly. In three
dimensional predictive reentry guidance approach9, the space shuttle’s two-dimensional
reentry trajectory planning method is extended to three-dimensions to achieve the desired
down range and cross range through drag and lateral acceleration profiles and a nonlinear
tracking control law10
.
In a predictor-corrector based reentry guidance11
, a six element state vector is propagated to
the target through the integration of equations of motion, whereas numerical optimization
methods are used to nullify the altitude, heading angle and range errors with use of bank
angle, angle of attack and time of roll reversal as control variables. In the “free-form”
guidance with flexibility in trajectory guidance law12
, simple real time integration with an
iterative predictor-corrector technique is used to generate reference trajectory, which reduces
the computational requirements and the problem of convergence. Kistler K-1 orbital vehicle13
uses an efficient predictor-corrector method to compute the bank angle and the start time of a
single bank angle reversal required to null the predicted target position miss. A simple and
efficient profile tracking reentry guidance algorithm is presented in ref.14, which is based on
optimal Linear Quadratic Regulator (LQR) theory. Another automated reentry guidance
algorithm15
uses the predictor-corrector method to generate the reference trajectory with
heating constraint and uses LQR technique for the trajectory control law.
It is to be mentioned here that the reentry guidance algorithms based on numerical predictor-
corrector methods yield reduced maneuvering with good targeting accuracy and robustness to
dispersions. Even though these algorithms have built-in mission flexibility and are adaptable
to any flight conditions without any pre-computations, full potential of these schemes
remains untapped due to computational complexity and risk of no convergence inherent in all
such numerical procedures. In our earlier study16
, a real time planning reentry guidance
algorithm based on predictor-corrector method was presented to achieve mission flexibility,
faster solution, improved accuracy and robustness. In the above study, bank angle and angle
of attack to meet the down range and cross range requirements at target are computed at
every guidance cycle during reentry by solving numerical predictor-corrector algorithm using
Newton-Raphson method. The Jacobian required for the control update is generated by
numerical finite differencing method. The path constraints are implemented at the guidance
output level, the dispersion due to this will be taken care by guidance computations in the
next cycle. In the present study, an alternate guidance algorithm is developed to generate the
reference trajectory onboard. This paper attempts to evolve a generic reentry guidance
planning algorithm which generates a feasible reference trajectory onboard before initiation
of the actual reentry for proving solution that best combines the solution methodologies and
onboard computing capabilities. Here also, numerical predictor-corrector method is used; but
the reference trajectory is achieved by solving guidance problem through a targeting problem
in Nonlinear Programming (NLP) Approach.
This paper gives the reentry guidance problem definition along with the vehicle constraints,
proposed generic reentry trajectory planning guidance and applications of the generic
trajectory planning algorithm for a typical RLV mission and performance results of the
proposed algorithm.

NSC 2005 Conference Paper No.39
4
2. REENTRY GUIDANCE PROBLEM
2.1 Reentry dynamics
In the present study, a strategy for trajectory planning is presented that aims to reduce
computational load on the onboard computers. In view of the enhanced accuracy
requirements for future reentry missions, a generalized model for the three degrees of
freedom dynamics about an oblate rotating planet is required. The system dynamic equations
are expressed in polar coordinate system with respect to an oblate rotating planet, which also
provide ease of computation of sensitivity coefficients, as described below.
ψγγ φ coscosgsingm
DV R −+
−=&
)cossinsincoscos(cos2 φγφψγφ +−Ω+ er (1)
]coscossincos[1
cos1 2
γψγγσγ φr
Vgg
Vm
L
VR +++
=&
)coscossincos(sincos
cossin22
φγφψγφ
φψ +Ω
+Ω+V
r ee (2)
φψγψγ
σγ
ψ φ tansincos)sin(cos
1sin
cos
1
r
Vg
Vm
L
V++
=&
φψφγ
φψγφ sinsincoscos
)coscostan(sin22
V
r ee
Ω+−Ω+ (3)
γsinVr =& ; r
coscosV ψγφ =& ;
φ
ψγλ
cosr
sincosV=& (4)
−−−= )1sin3()
r
R(J
2
31
rg 22e
22R φµ
(5)
φφµ
φ cossin3
2
22
=
r
RJ
rg e
(6)
)r,M,(SCV)r(m2
1L L
2 αρ= ; )r,M,(SCV)r(m2
1D D
2 αρ= (7)
2.2 Vehicle and control constraints
The objective of any reentry guidance system is to steer the vehicle from reentry interface to
a specified Terminal Area Energy Management (TAEM) interface, within the prescribed
error bands and with adequate robustness to dispersed flight environment. The dispersions of
significance include are: (1) vehicle characteristics, (2) environmental characteristics, (3)
initial reentry state vector and (4) propagation error in navigation state. In order to achieve
the mission objectives under such conditions, the vehicle needs to fly within the reentry
corridor defined by the thermal, structural and hinge moment constraints along with the
vehicle maneuvering capability constraints. While, the maneuverability constraint appears in
terms of the requirement to fly in equilibrium glide condition, the thermal constraint is
generally expressed in terms of heat rate at stagnation point. Further, the structural limit is

NSC 2005 Conference Paper No.39
5
defined in terms of structural load factor, while dynamic pressure limit arises from actuator
capabilities. These path constraints are as given below.
)cos(r
Vg)cos(
m
L 2
γσ
−≤ ; max
2/12 ])/(1[ nDLm
Dnz ≤+= (8)
max
15.3
cir
2/1
0N
QV
V
R
11030Q && ≤
=
ρ
ρ ; max
2 qV)2/1(q ≤= ρ (9)
2.3 Reentry Guidance Problem Definition
In its most general form the guidance problem can be states as: Given initial state 0X , the
guidance objective is to estimate )t(α and )t(σ histories without violating the path constraints
given by Eq. 8 and 9 so that at final time ft , the terminal state vector fX satisfies the TAEM
interface conditions. The terminal target conditions are mainly to achieve TAEM interface
location with specified energy level and velocity heading. By propagating the trajectory up to
TAEM energy level, fE , the target conditions are given by,
0)E( df =−φφ ; 0)E( df =− λλ (10)
0=− df )E( ψψ ; 0)E( df =− γγ (11)
where, dφ , dλ are desired latitude and longitude of TAEM interface location and dψ , dγ
are the desired azimuth and flight path angle at TAEM interface.
3. GENERIC REENTRY GUIDANCE THEORY
3.1 Trajectory planning guidance law
The target error vector is defined in terms of the difference in required and achieved states as,
df XXY −= (12)
The path constraint error can be defined as an integral of square of the amount by which the
constraint is violated. Therefore, for the ith constraint, the constraint error is defined as
∫=
f
i
t
t
ic dtcC
0
2∆δ ; where,
>−=
=otherwise0
0CCCifCC
liiici ,
∆∆∆ (13)
It is to be noted that if the ith constraint is satisfied then 0
ic=δ . Similarly, the constraint
violation can be computed for all the path constraints. The constraint error vector C is defined
with components of ic
C∆ . Therefore, in general, the reentry guidance problem can be
restated as an optimization problem where the following performance index is to be
minimized.
∫+=
ft
t
ccT
ffT dt))t(),t(())t(),t(()()(J
0
uXZCuXCXHYXY (14)

NSC 2005 Conference Paper No.39
6
subject to the differential constraints given by Eq. 1 to Eq. 4 with the prescribed initial
conditions t0 and X0, where Tc ttt )()()(u σα= is the control vector history. Assuming the
target error as,
)()())t((e ffT
ct XYHXYu = (15)
and the constraint error as
∫=
ft
t
ccT
cc dt))t(),t(())t(),t(())t((e
0
uXZCuXCu (16)
the performance index can be rewritten as
))(u())(u( teteJ ccct += (17)
This optimal control problem can now be converted into a NLP problem by parameterizing
the control time history )(u tc , as given below.
1kkk1k
kk1kkc ttt
tt
ttuuutu +
+
+ <<−
−−+= ,
)(
)()()( (18)
where ku are the control parameters. If udenotes the vector of control parameters, then the
performance index and the corresponding dynamics are written as,
)u()u()u( ct eeJ += ; )u),(X(fX t=& (19)
It is to be noted that, the guidance solution is achieved when 0J =)u( . Since the terms in Eq.
19 are quadratic, this is possible only when
00et .)u( = ; 00ec .)u( = (20)
which states that the specified target conditions are achieved without violating the path
constraints. This problem can be viewed as targeting problem in NLP for computing the
control vector ∗= uu which ensures that error vector 0u
uue =
=
)(e
)(e)(
*c
*t* , subject to the
system dynamics, )u),(X(fX t=& and the initial conditions 0t and 0X . The solution
methodology developed for this problem is given below.
3.1.1 Solution Methodology
The solution is started by the a priori knowledge of the reference control vector, 0u and the
error vector for this reference control vector, )u(e 0 is computed. Next, the increment on the
control vector, u∆ is found so that the control vector, uuu* ∆+= 0 ensures )u(e
* = 0.
The gradient vectors of the target and constraint errors are defined as,

NSC 2005 Conference Paper No.39
7
0
tk
t
2
t
1
t0
Te
u
e
u
e
u
e
u
)u(
∂
∂
∂
∂
∂
∂= K∇∇∇∇ ;
0u
)u(
∂
∂
∂
∂
∂
∂=
k
c
2
c
1
c0
Te
u
e
u
e
u
ec
K∇∇∇∇ (21)
and the solution to the above problem is obtained through a simple NLP algorithm, in which
the optimum incremental control vector u∆ is obtained iteratively by finding optimum search
direction and optimum step length along the search direction, in order to drive the error
vector to zero. If the control vector size be k (k > 2) and the variation of target error and
constraint error about the reference control vector 0u is taken to be linear, then the unique
optimum search direction u∆ is the one, which satisfies the following linearized error
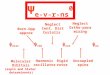
equation 000 =+ )u(eu)u(S ∆ and minimizes the length of u∆ . The solution to the above
equation defines a linear manifold )u( 0C (in this case, a straight line) as given in Fig-1.
The
The desired minimum norm correction, u∆ is then the vector of minimum length from 0u to
the linear manifold )u( 0C . Analytically, this is given as
)u(e)]u(S)u(S[)u(Su 01
0T
00T −−=∆ (22)
If the errors are actually linear, then the optimum minimum norm correction computed in the
Eq. (22) ensures zero errors. For the realistic case, an optimum step length along the
minimum-norm direction is required to minimize the error. This is computed by one-
dimensional minimization method. The study indicates that quadratic interpolation method is
sufficient to find the optimum step length. The function to be minimized along the search
direction, u∆ is the sum of the squares of the errors namely,
200J )uu(e)( ∆δδ += ; with 2
00 0J )u(e)( = ;2
00 1J )uu(e)( ∆+= (23)
Differentiating via chain rule yields
u)u()u(e)( ∆00T
0 S20J =′ ; (24)
A quadratic polynomial is fitted for the function )(J0 δ with the values of )0(J0 , )1(J0 and
)0(J'
0 . The quadratic polynomial along with the optimum step length and the optimum
control vector is given below:
Fig-1 Minimum-Norm Correction Direction

NSC 2005 Conference Paper No.39
8
22100 aaa)(J δδδ ++= ;
2
1*
a2
a−=δ ; uuu
** ∆δ+= 0 (25)
The optimum solution is achieved through iteration with updated value of *uu = till the error
vector is within the allowable tolerances.
3.2 Generic planning algorithm
The trajectory planning algorithm is a numerical iterative predictor-corrector method.
Assuming nominal vehicle data and environmental parameters and with initial guess for the
control vector, the predictor numerically propagates the trajectory from reentry interface to
the terminal energy. The error and gradient vectors and sensitivity matrix are computed for
the predicted trajectory and using this information, the corrector computes the optimum
search direction, step length and updates the control vector.
This procedure is iterated till the optimum solution is achieved. With the optimum control
vector history, the reference trajectory profiles are generated which ensures that the achieved
target conditions satisfy all the path constraints. These computations are carried out prior to
reentry and the reference profiles are stored for further use in the profile tracking algorithm
during actual reentry.
4. APPLICATION OF THE REALTIME PLANNING ALGORITHM TO A
TYPICAL RLV MISSION
The generic reentry guidance planning algorithm described above is applied to a typical RLV
mission. The objective of the guidance function is to steer the vehicle from any reentry
interface point to the defined TAEM interface location with specified energy level, Ef,
without violating the heat flux constraint. The necessary models and formulations to meet the
above objectives as applicable to the generic guidance law are given in this section. The
development involves the proper selection of control vector for three dimensional trajectory
planning, evolution of different methods and optimum & efficient strategy for the
computation of sensitivity matrix. The terminal target conditions are defined as
0E df =− φφ )( ; 0E df =− λλ )( (26)
where, )( fEφ , )( fEλ are the final latitude and longitude at the defined TAEM energy
level, fE and dφ , dλ are the targeted latitude and longitude values respectively. The path
constraint chosen is the stagnation point heat flux which is required to be less than the
allowable limit lQ& and is as given below.
0QQ 1 ≤− && ; where
15.3
cir
2/1
0N V
V
R
11030Q
=
ρ
ρ& (27)
4.1 Control vector
Three dimensional trajectory planning is achieved by steering through α and σ profiles.
With regard to the control history, an approach using only the bank angle (σ ) modulation
without reversal, is employed while keeping the predefined profile for angle of attack (α ).
Usage of predefined profile for α provides a major advantage in that it ensures the
satisfaction of vehicle and mission constraints such as trim limits and better management of

NSC 2005 Conference Paper No.39
9
thermal constraint. In the present planning algorithm development, the fixed angle of attack
profile is used and at any instant of time, the angle of attack (figure 2) is computed as,
for ,tt a< nt αα =)( ; & for ,tt a≥ )()( an ttt −−= ααα & (28)
where predefined values are used for nα , and α& . The bank angle history is assumed to be
zero during the initial phase of reentry while vehicle flies with high angle of attack, which
ensures better thermal management in the high velocity regime. Non-zero bank angle profile
is initiated after a defined time and from this time onwards till the TAEM interface, the bank
angle modulations are considered sufficient for achieving the desired trajectory, while
meeting the target and path constraints. The σ history is parameterized as given in Fig-3.
At any instant of time, the bank angle is computed as
for ,1tt < 0)( =tσ (29)
for ,tt i≥
ii
i
j
jjjd )tt()tt()t( σσσσ && −+
−+= ∑
−
=+
1
1
1 (30)
The parameters considered in the present study are; the initial bank angle at the time of bank
initiation and bank angle rates during the remaining phase of the flight where the time of
initiation of these rates are predefined values. Therefore, the control vector assumed for this
study is given as
[ ]T654321d σσσσσσσ &&&&&&=u (31)
It is to be noted here that larger numbers of parameters, along with a selection of proper time
instants ensure faster solution. In the present study, the time instants assumed are arbitrary
and only the seven parameters are considered for the model development. As per the mission
requirements, the parameters can be increased and the general model developed in this
section can be used for the extended case also.
4.2 Target and constraint error
Using Eq. 26 and Eq. 27, the target error vector, constraint error, weighting matrix and error
vector are defined as
Fig-2 Angle of Attack History
t1 t2 t3 t4 t5 t6
σd
σ1
σ2
σ3
σ4
σ5
σ6
σ(d
eg)
t
Fig-3 Bank Angle History

NSC 2005 Conference Paper No.39
10
−
−=
df
df
E
E
λλ
φφ
)(
)(Y ; YHY
Tte
−= ;
=
2221
1211
HH
HHH (32)
dtQe
ft
t
cc ∫∆=
0
2& ;
−=
=otherwise,0
QQQifQQ 1
c
&&&&&
∆∆∆ ;
=
c
t
e
e)u(e (33)
4.3 Sensitivity matrix computation
In gradient based methods, the efficiency and accuracy of the solution depends on the
correctness of the sensitivity matrix. In this regard, the literature shows that the sensitivity
matrix computations are carried out using finite differencing and in these methods the
correctness depends on the perturbation levels used for finite differencing16
. It is found that
due to the wide range of trajectory parameters during the entire reentry phase, the
perturbation levels required for a particular control variable also vary and the correct level of
these perturbations is a strong function of the flight environment.
In addition, perturbation selection is severely affected by the resolutions of the computations
in a particular computer system and the perturbation level used in one computer system may
not produce correct results in another computer system for the same flight environment. A
new approach proposed in the present study aims to simplify the sensitivity matrix
computations and is described below.
The system dynamics and corresponding sensitivity of system state are given as
)uX,(fX =& ; ii uudt
d
∂
∂=
∂
∂ )u,X(fX (34)
where, u is the control vector and iu∂
∂X is the sensitivity of system state vector with respect to
the control parameter, iu . The basic states for the sensitivity coefficients are given below:
T
dddddd
rV
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂=
σ
λ
σ
φ
σσ
ψ
σ
γ
σ1ξξξξ ;
T
1111112
rV
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂=
σ
λ
σ
φ
σσ
ψ
σ
γ
σ &&&&&&ξξξξ
T
2222223
rV
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂=
σ
λ
σ
φ
σσ
ψ
σ
γ
σ &&&&&&ξξξξ ;
T
3333334
rV
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂=
σ
λ
σ
φ
σσ
ψ
σ
γ
σ &&&&&&ξξξξ
T
4444445
rV
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂=
σ
λ
σ
φ
σσ
ψ
σ
γ
σ &&&&&&ξξξξ ;
T
5555556
rV
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂=
σ
λ
σ
φ
σσ
ψ
σ
γ
σ &&&&&&ξξξξ
T
6666667
rV
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂=
σ
λ
σ
φ
σσ
ψ
σ
γ
σ &&&&&&ξξξξ (35)
The corresponding dynamic equations for the sensitivity coefficients are given below.
iii ΜL += ξξξξξξξξ& (36)

NSC 2005 Conference Paper No.39
11
where, the elements of the matrix L and Mi are derived using the Eq. (34) from the dynamics
given in Eq. (1) to Eq. (4).
The states for the constraint error sensitivity are given below.
T
6
c
5
c
4
c
3
c
2
c
1
c
d
c eeeeeee
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂
∂=
σσσσσσσ &&&&&&ηηηη (37)
The corresponding dynamic equations for the sensitivity coefficients are given below:
−= 1411c1
2V
153QQ2 ξξξξξξξξ
β∆η
.* &&& ;
−= 2421c2
2V
153QQ2 ξξξξξξξξ
β∆η
.* &&&
−= 3431c3
2V
153QQ2 ξξξξξξξξ
β∆η
.* &&& ;
−= 4441c4
2V
153QQ2 ξξξξξξξξ
β∆η
.* &&&
−= 5451c5
2V
153QQ2 ξξξξξξξξ
β∆η
.* &&& ;
−= 6461c6
2V
153QQ2 ξξξξξξξξ
β∆η
.* &&&
−= 7471c7
2V
153QQ2 ξξξξξξξξ
β∆η
.* &&& (38)
5. PERFORMANCE OF THE GENERIC REENTRY GUIDANCE LAW
In order to evaluate the performance of the generic guidance algorithm, detailed simulation
studies are carried out for the reentry mission objectives of achieving the TAEM interface
location with specified energy level without violating heat flux constraint using a general
RLV simulation tool17
. The performance measures for the trajectory planning algorithm are
the faster convergence, accuracy of achieving the target and constraint violation error. The
robustness and mission flexible capability of the planning algorithm are established by
ensuring nominal performance of the algorithm under widely varying reentry interface
conditions. Typical data available in literature is used for the vehicle characteristics18
whereas
standard models are used for simulating environment. The detailed vehicle data along with
dispersion are used for the simulator, whereas, to improve the guidance execution time,
simplified aerodynamic model in terms of curve fits and exponential model for density are
used in predictor part of the trajectory planning algorithm.
The initial conditions, target parameters, constraint limit and design parameters used to
evaluate the performance of the algorithm are purely arbitrary and do not belong to any
specific RLV mission. The purpose of such arbitrary values is to test the algorithm and its
implementation under limiting conditions.
5.1 Reentry interface and target
The simulations are carried out from the reentry interface to the target TAEM interface point
and the corresponding nominal reentry interface point assumed for the study is given by
0t = 0
h = 121.809 km , V = 7635.7 m/s , γ = -2.1 o
Az = 100 o , φ = 15
o , λ = 0
o

NSC 2005 Conference Paper No.39
12
The velocity, flight path angle and velocity azimuth are the relative values. The guidance
target location at 7800 km down range and 1800 km cross range with respect to reentry
interface location is assumed. Correspondingly, the target TAEM interface location at energy
level of dE = 1234457 m2/s
2 is defined as
dφ = -16o ; dλ = 64.7
o
The trajectory is propagated up to dE and hence target conditions are only the latitude and
longitude defined above. The limit on the heat flux rate is assumed as 70 W/cm2.
5.2 Design parameters
5.2.1 Initial guess for the control history in trajectory planning algorithm
The fixed α profile defined by Nα = 45o, α& = -0.0767
o/s and at = 1030 s is used in
the trajectory planning algorithm. The initial guess for σ profile is given by
t1 = 240 s, dσ = 82o, 1σ& = -0.01
o/s
t2 = 500 s, 2σ& = -0. 03o/s
t3 = 650 s, 3σ& = -0. 12o/s
t4 = 800 s, 4σ& = -0. 1o/s
t5 = 950 s, 5σ& = -0. 1o/s
t6 = 1200 s, 6σ& = -0. 05o/s
The initial guess as given above is used for all the trajectory planning cases.
5.2.2 Weighting matrix
The weighing matrix elements are selected such that the maximum allowable dispersion on
target latitude and longitude is 0.01o. Accordingly the weighing matrix elements are given as
=
360000000
036000000H
5.2.3 Termination conditions
The algorithm execution is stopped under one of the following conditions:
(i) Number of iterations > 50
(ii) te < 10 (corresponding to 0.03 o tolerance) and ce < 100.
(iii) Optimum step length computed by quadratic interpolation algorithm is δ <
1.0x10-04
. This criteria indicates that the solution achieved is very close to the
previous instant value.
5.3 Performance Results
Returning from the orbit for different missions, the vehicle may initiate reentry flight at same
altitude and velocity, but different reentry conditions, if the orbits are very similar8.
Therefore, in order to measure the performance of the trajectory planning algorithm,
simulations are carried out with varying reentry interface conditions to achieve the specified

NSC 2005 Conference Paper No.39
13
target without violating the mean heat flux value. The reentry flights simulated in the present
study is with reentry location latitude varying from +20o to -15
o whereas nominal reentry
latitude assumed is at 15o. Table-1 provides these results.
Table-1
Reentry Interface Conditions and Performance of Trajectory Planning Algorithm
Parameters Case-1 Case-2 Case-3 Case-4 Case-5
Reentry Interface
h (km)
V (m/s)
γ (deg)
Az (deg)
φ (deg)
λ (deg)
121.8
7635.7
-2.1
100
15
0
121.8
7635.7
-2.1
100
20
0
121.8
7635.7
-2.1
100
0
0
121.8
7635.7
-2.1
100
-10
0
121.8
7635.7
-2.1
100
-15
0
Target Aimed
dφ (deg)
dλ (deg)
-16
64.7
-16
64.7
-16
64.7
-16
64.7
-16
64.7
Constraint Imposed
Q& (W/cm2)
< 70
< 70
< 70
< 70
< 70
Target Achieved
fφ (deg)
fλ (deg)
-16.005
64.707
-15.78
64.73
-16.05
64.696
-15.999
64.68
-16.004
64.75
The performance of trajectory planning algorithm in terms of solution convergence is given
in Fig-4. It is seen from the figure that for all the cases, the trajectory planning algorithm
drives both target and errors to zero within 10 iterations. For all the cases, the predefined
angle of attack profile is used whereas bank angle profiles generated by the trajectory
planning algorithm for different cases are given in Fig-5. It is again seen that the control
profiles are altered significantly in order to meet the target conditions without violating heat
flux constraint from different initial conditions. From the trajectory profile generated by the
planning algorithm for different cases as given in Fig-6, it is seen that the algorithm steers the
vehicle from different reentry interface points to the specified TAEM interface point. The
target conditions aimed and achieved show that the accurate solution is achieved for all the
reentry interface conditions as given in Table-1 and Fig-6. The heat flux profiles given in
Fig-7 show that for all the cases, the maximum value is limited to 70 W/cm2.
5.4 Algorithm execution time
The software modules are executed in Intel Pentium-4 PC and WINDOWS FORTRAN
compiler. The execution time for trajectory planning algorithm for 10 iterations is about 9s.

NSC 2005 Conference Paper No.39
14
Fig-4 Convergence Errors for Different
Trajectory Planning Cases
-150
-100
-50
0
50
100
0 400 800 1200 1600
CASE-4
CASE-5
CASE-3
CASE-1
CASE-2
TIME (s)
σσ σσ (
de
g)
Fig-5 Bank Angle Profile Generated by
Trajectory Planning Algorithm
for Different Cases
010
2030
4050
6070
-20
-10
0
10
20
20
40
60
80
100
120
140
Latitude (deg)
Longitude (deg)
Alt
itu
de
(k
m)
0
20
40
60
80
0 400 800 1200 1600
TIME (s)
HE
AT
FL
UX
(W
/cm
2)
Fig-6 Trajectory Profiles for Different
Cases Generated by
Trajectory Planning Algorithm
Fig-7 Heat Flux Profiles for
Different Planning Cases
0
0.5x106
1.0x106
1.5x106
0 2 4 6 8 10
CASE-1
CASE-4
CASE-5
CASE-2
CASE-3WE
IGH
TE
D T
AR
GE
T E
RR
OR
0
10000
20000
30000
0 2 4 6 8 10
CASE-1,CASE-2
CASE-3
C A SE-4
CASE-5
ITERATION
WE
IGH
TE
D C
ON
ST
RA
INT
ER
RO
R

NSC 2005 Conference Paper No.39
15
6. CONCLUSIONS
In this paper, a generic reentry trajectory planning guidance law is presented to steer the
vehicle from any reentry interface point to the specified target meeting all the path constraints
without the need for initial feasible reference trajectory. The planning algorithm solves the
three dimensional trajectory planning problem without the bank reversals and is capable of
handling any reentry interface condition, thus having in-built mission flexibility. In this
algorithm, the optimal control problem is converted into an equivalent targeting problem in
NLP and a simple solution methodology is developed to solve the resulting reentry guidance
problem and the trajectory planning algorithm can be executed onboard during the time
available between the end of de-boost manoeuvre and start of the actual reentry, without any
difficulties. This generic guidance law is then applied to a generic RLV mission with the
objective of steering the vehicle with heat flux constraint from any reentry interface point to
the target of a TAEM interface location with specified energy level. In order to increase
guidance accuracy and to reduce the computational load and for the ease of computation of
sensitivity matrix, the general vehicle model moving about an oblate rotating planet is
developed in polar coordinate system for three dimensional trajectory planning and profile
tracking. The bank angle profile modulation without roll reversal, along with a predefined
angle of attack profile meeting all the vehicle constraints, is used as control histories for the
trajectory planning, which is considered to be an advantage from the mission planning point
of view. The control vector components assumed for the planning algorithm are initial bank
angle and parameterized rates of bank angle history. The sensitivity matrix coefficients are
derived as additional states and are computed through numerical integration, which avoid the
problems related to numerical computation of the gradients.
The robustness of the reentry trajectory planning algorithm is established by steering the
vehicle only through bank angle modulation without any roll reversal from different reentry
interface points physically separated by 3900 km to a specified target, meeting the vehicle
constraints. The computational load for this algorithm can be handled easily by the present
day computers. The algorithm developed is independent of any mission specific data and
therefore fully generic and adaptable to any RLV mission. The output of the trajectory
planning algorithm can be used for profile tracking algorithms during actual reentry. The
integrated guidance algorithm with the proposed trajectory planning algorithm along with a
profile tracking algorithm available in literature forms a good candidate for any RLV
mission.
REFERENCES 1 Harpold, J.C., and Graves, C.A., “Shuttle Entry Guidance”, Jl. of Astronautical Sciences,
Vol 27, No.3, pp.239-268, July-Sept., 1979 2
Ishimoto, S., Takizawa, M., Suzuki, H., and Morito, T., “Flight Control System of
Hypersonic Flight Experiment Vehicle”, AIAA Paper No. AIAA-96-3403, Atmospheric
Flight Mechanics Conference, July 1996. 3
Hanson, J. M., Coughlin, D. J., Dukeman, G.A., and Malqueen, J.A, and McCarter,
J.W., “Ascent, Transition, Entry and Abort Guidance Algorithm design for the X-33
Vehicle”, AIAA Paper No. AIAA-98-4409, Guidance Navigation and Control
Conference, 1998.

NSC 2005 Conference Paper No.39
16
4 Dukemann, G. A., Gallaher, M. W., “Guidance and Control Concepts for the X-33
Technology Demonstrator”, AAS Paper No. AAS-98-026. 5
Lu, P., Hanson, J. M., Dukeman, G.A., and Bhargava, S., “An Alternative Entry
Guidance Scheme for the X-33”, AIAA Paper No. AIAA-98-4255, Atmospheric Flight
Mechanics Conference, 1998. 6
Lu, P., “Entry Guidance and Trajectory Control for Reusable Launch Vehicle”, Jl. of
Guidance, Control and Dynamics, Vol 20, No.1, pp.143-149, Nov-Dec 1997. 7
Lu, P., “Regulation about Time-Varying Trajectories: Precision Entry Guidance
Illustrated”, AIAA Paper No. AIAA-99-4070. 8
Lu, P., Shen, Z., Dukeman, G.A., Hanson, J. M., “Entry Guidance by Trajectory
Regulation”, AIAA Paper No. AIAA-2000-3958, Guidance, Navigation and Control
Conference and Exhibit 2000. 9
Mease, K. D., Chen, D.T., Tandon, S., Young, D.H., and Kim, S., “A Three Dimensional
Predictive Entry Guidance Approach”, AIAA Paper No. AIAA-2000-3959, Guidance,
Navigation and Control Conference and Exhibit 2000. 10
Bharadwaj, S., Rao, A. V., and Mease, K. D., “Entry Trajectory Tracking Law via
Feedback Linearization”, Jl. of Guidance, Control and Dynamics, Vol 21, No.5, Sept. –
Oct. 1998. 11
Youssef, H., Choudhry, R.S., Lee, H., Rody, P., and Zimmermann, C., “Predictor-
Corrector Entry Guidance for Reusable Launch Vehicle”, AIAA Paper No. AIAA-2001-
4043, Guidance, Navigation and Control Conference, 2001. 12
Ishizuka, K., Shimura, K., and Izhimoto, S., “A Re-entry Guidance Law Employing
Simple Real-time Integration”, AIAA Paper No. AIAA-98-4329. 13
Fuhry, D. P., “Adaptive Atmospheric Reentry Guidance for the Kistler K-1 Orbital
Vehicle”, AIAA Paper No. AIAA-99-4211. 14
Dukemann, G. A., “Profile-Following Entry Guidance Using Quadratic Regular
Theory”, AIAA Paper No. AIAA-2002-4457. 15
Zimmerman, C., Dukeman, G., Hanson, J., “An Automated Method to Compute Orbital
Reentry Trajectories with Heating Constraints”, AIAA Paper No. AIAA-2002-4454. 16
Ashok Joshi, Sivan, K., “Reentry Guidance for Generic RLV Using Optimal
Perturbations and Error Weights”, Paper No. AIAA-2005-6438, AIAA Guidance,
Navigation and Control Conference, San Fransisco, USA, August 15-18, 2005. 17
Ashok Joshi, Sivan, K., “Modeling and Open Loop Simulation of Reentry Trajectory for
RLV Applications”, Proceedings of the 4th International Symposium on Atmospheric
Reentry Vehicle and Systems, March 21-23, 2005, Arcachon, France. 18
Eussel, W.R.,(Ed.), “Aerodynamic Design Data Book, Volume-I, Orbiter Vehicle SIS-
1”, Report No. SD72-SH-0060, Space Systems Group, Rockwell International,
California, 1980.