Embed Size (px)
Citation preview

A generalised phase field model for fatigue crack growth
in elastic-plastic solids with an efficient monolithic solver
Zeyad Khalila, Ahmed Y. Elghazoulia, Emilio Martınez-Panedaa,∗
aDepartment of Civil and Environmental Engineering, Imperial College London, LondonSW7 2AZ, UK
Abstract
We present a generalised phase field-based formulation for predicting fatigue
crack growth in metals. The theoretical framework aims at covering a wide
range of material behaviour. Different fatigue degradation functions are con-
sidered and their influence is benchmarked against experiments. The phase
field constitutive theory accommodates the so-called AT1, AT2 and phase
field-cohesive zone (PF-CZM) models. In regards to material deformation,
both non-linear kinematic and isotropic hardening are considered, as well as
the combination of the two. Moreover, a monolithic solution scheme based
on quasi-Newton algorithms is presented and shown to significantly outper-
form staggered approaches. The potential of the computational framework is
demonstrated by investigating several 2D and 3D boundary value problems of
particular interest. Constitutive and numerical choices are compared and in-
sight is gained into their differences and similarities. The framework enables
predicting fatigue crack growth in arbitrary geometries and for materials ex-
∗Corresponding author.Email address: [email protected] (Emilio
Martınez-Paneda)
Preprint submitted to CMAME October 22, 2021
arX
iv:2
110.
1042
5v1
[cs
.CE
] 2
0 O
ct 2
021

hibiting complex (cyclic) deformation and damage responses. The finite ele-
ment code developed is made freely available at www.empaneda.com/codes.
Keywords:
Phase field fracture, Fatigue, Kinematic hardening, Bauschinger effect,
Quasi-Newton
1. Introduction
Fatigue-induced fracture is considered to be one of the most frequent
causes of failure in engineering components. Due to its complex nature, the
development of computational models capable of predicting fatigue cracking
is regarded to be highly challenging and has been the subject of extensive re-
search. Generally, the evolution of fatigue damage occurs in different stages.
Firstly, nucleation of permanent damage takes place as a result of sub- and
microstructural changes within the material, followed by the creation of mi-
croscopic cracks. Subsequently, these microscopic flaws start growing and
eventually coalescence, leading to the formation of dominant macro-cracks.
These macro-cracks then propagate leading to structural instability and com-
plete fracture of the component. Fatigue design is commonly based on clas-
sical empirical methods [1]. Such methods involve the estimation of the total
life to failure as a function of the cyclic stress range, which is referred to as
the S-N curve approach, or the strain range (plastic or total). These fatigue
design strategies are commonly referred to as total-life approaches, where
the fatigue life is defined as the number of cycles (Nf ) or reversals (2Nf ) to
failure. The stress-life or S-N curve approach was first developed by Wohler
[2]. Under low cyclic stress amplitudes, the material behaves mainly in an
2

elastic manner and a very large number of cycles are required to cause failure;
normally more than 106, which is referred to as High-cycle Fatigue (HCF).
This approach has become popular in applications involving low-amplitude
cyclic stresses such as steel bridges under traffic loading and railway axles.
On the other hand, a much lower number of cycles are needed to cause failure
if the applied stresses are large enough to cause plastic deformations; in the
order of 102 to 104, a regime referred to as Low-cycle Fatigue (LCF). In such
situations, fatigue life is determined in terms of the applied strain range,
as first proposed by Coffin [3] and Manson [4]. In the case of components
experiencing very large plastic deformations, complete structural failure can
occur after very few cycles [5, 6]. This is often referred to as Extremely-
or Ultra-low Cycle fatigue (ELCF or ULCF). Due to their empirical nature,
stress-life and strain-based approaches have limited applicability and cannot
be readily generalised to arbitrary materials, geometries and loading histories.
Variational phase field fracture models can provide a reliable computa-
tional framework to predict High-, Low- and Extremely low-cycle fatigue,
overcoming the limitations of semi-empirical approaches. Phase field fracture
methods have been gaining increasing attention. Predictions are based on the
thermodynamic framework outlined in the works of Griffith [7] and Irwin [8],
where a crack would only propagate if the energy release rate exceeds a crit-
ical value, the material toughness Gc. Francfort and Marigo [9] introduced a
variational formulation for Griffith’s thermodynamical framework, including
the surface energy dissipated due to crack formation in the total potential
energy. Inspired by the work of Mumford and Shah [10] on image segmen-
3
tation, Bourdin et al. [11, 12] introduced a scalar phase field variable that
regularises the discrete crack topology into a diffuse crack representation. In
addition, Miehe and co-workers [13, 14] have made significant contributions
to the development of the method by proposing new robust solution schemes.
Phase field fracture methods have been used in numerous applications,
including dynamic fracture [15–17], cracking of composite materials [18–21],
ductile damage [22–24], hydrogen-assisted cracking [25–28], and fracture of
functionally graded materials [29, 30], among many others; see Refs. [31, 32]
for an overview. Recently, the success of variational phase field methods has
been extended to fatigue crack growth [33–37]. This is an exciting and nat-
ural extension for phase field fracture; Griffith’s thermodynamic principles
should hold for fatigue crack growth and metal fatigue was actually the mo-
tivation for Griffith’s seminal work [7]. Lo et al. [34] combined a phase field
kinetic law with a modified J-integral to capture Paris-law type fatigue crack
growth behaviour. Carrara et al. [35] proposed a novel variational frame-
work to capture the fatigue behaviour of brittle materials by introducing a
fatigue degradation function that degrades the material toughness. Simoes
and Martınez-Paneda [36] simulated the fatigue failure of a NiTi stent, ac-
counting for both fatigue damage and phase transformations. Hasan and
Baxevanis [37] introduced a toughness degradation law through a measure of
accumulated elastic strain energy density that enabled capturing both total
life and defect tolerant approaches to fatigue. Golahmar et al. presented
a phase field formulation for hydrogen assisted fatigue [38]. However, these
studies are all limited to the analysis of linear elastic materials; only very re-
4

cently have phase field methods been used to predict fatigue crack growth in
elastic-plastic solids. Seiler et al. [39] used a local strain approach to empiri-
cally incorporate plasticity via Neuber’s rule. Haveroth et al. [40] presented
a new thermo-mechanical fatigue formulation using a Voce-type hardening
law and a new degradation function that degrades both elastic and plastic
strain energy densities. Finally, Ulloa et al. [41] developed a phase field
fatigue formulation for elastic-plastic solids suitable for both low and high
cycle fatigue regimes and capable of capturing ratcheting effects.
In this work, we present a generalised formulation for fatigue damage in
metals. We aim to model a general class of elastic-plastic materials and thus
account for the combination of non-linear isotropic and kinematic harden-
ing effects. Moreover, unlike previous work, we do not restrict our attention
to one class of phase field fracture models but accommodate both brittle
and quasi-brittle formulations; namely, the so-called AT1, AT2 and PF-CZM
models. In addition, we couple our phase field fatigue framework with a
quasi-Newton monolithic solution scheme and show that it is more robust
and significantly more efficient than the widely-used staggered schemes. This
is of notable importance given the computational cost associated with cycle-
by-cycle fatigue predictions. Several 2D and 3D boundary value problems are
investigated to gain insight into the various constitutive choices of the model
for deformation and fracture. Firstly, we simulate the fatigue failure of pla-
nar specimens under uniaxial cyclic loading. Predictions are compared with
experiments on a carbon steel that exhibits combined non-linear isotropic
and kinematic hardening. Secondly, fatigue crack growth in a Compact Ten-
5

sion (CT) sample is investigated, evaluating the differences between various
phase field fracture models and solution schemes. Thirdly, the failure of an
asymmetrically-notched bar is simulated to gain insight into the interplay
between hardening mechanisms and damage. Finally, we demonstrate the
capabilities of the computational framework in predicting the failure of 3D
components by modelling crack nucleation and growth in a pipe-to-pipe con-
nection.
The remainder of this manuscript is organised as follows. The generalised
theoretical framework presented is described in Section 2. In Section 3 we
provide details of the numerical implementation, including the monolithic
quasi-Newton solution scheme. The results computed are shown and dis-
cussed in Section 4. Finally, the manuscript ends with concluding remarks
in Section 5.
2. Theory
In this section, we present our generalised formulation, suitable for ar-
bitrary constitutive choices of crack density function, fracture driving force,
degradation function and cyclic material response. The theory refers to an
elastic-plastic body occupying an arbitrary domain Ω ⊂ IRn (n ∈ [1, 2, 3]),
with an external boundary ∂Ω ⊂ IRn−1, on which the outwards unit normal
is denoted as n. We shall first define the kinematic variables (Section 2.1),
then derive the force balances using the principle of virtual power (Section
2.2), and finally particularise our theory to relevant constitutive choices for
the deformation and fracture behaviour of the solid (Section 2.3).
6

2.1. Kinematics
The primary kinematic variables are the displacement field vector u and
the damage phase field φ. Small displacements and strains are assumed, such
that the total strain tensor ε reads
ε =1
2
(∇uT +∇u
). (1)
Also, we adopt the standard decomposition of strains into elastic and plastic
components, such that:
ε = εe + εp . (2)
The nucleation and growth of cracks are described by using a smooth
continuous scalar phase field φ ∈ [0; 1]. The use of an auxiliary phase field
variable to implicitly track interfaces has proven to be a very compelling com-
putational approach for numerous interfacial problems, such as microstruc-
tural evolution [42] and metallic corrosion [43]. In the context of fracture
mechanics, the phase field variable resembles a damage variable; it must
grow monotonically φ(x, t) ≥ 0 and describes the degree of damage, with
φ = 1 denoting fracture and φ = 0 corresponding to the intact phase. Since
φ is smooth and continuous, discrete cracks are represented in a diffuse fash-
ion, with the smearing of cracks being controlled by a phase field length scale
`. The aim of this diffuse representation is to introduce, over a discontinuous
surface Γ, the following approximation of the fracture energy [11]:
Φ =
∫Γ
Gc dS ≈∫
Ω
GcΥ(φ,∇φ) dV, for `→ 0+, (3)
where Υ is the so-called crack surface density functional and Gc is the critical
energy release rate or material toughness. We extend this rate-independent
7

description of fracture to accommodate time and history dependent prob-
lems. Thus, for a cumulative history variable ϑ, which fulfills ˙ϑ > 0, and a
fatigue degradation function f(ϑ), the fracture energy can be re-formulated
as follows,
Φ =
∫ t
0
(∫Ω
Gcf(ϑ (t)
)Υ(φ,∇φ) dV
)dt . (4)
As described below, this is complemented by appropriate constitutive
choices that characterise the degradation of the fracture energy with the
fatigue history variable ϑ.
2.2. Principle of virtual power. Balance of forces
Now, let us derive the balance equations for the coupled deformation-
fatigue system using the principle of virtual power. Define σ as the symmetric
Cauchy tensor, T as a surface traction acting on the boundary of the solid
∂Ω and b as a prescribed body force per unit volume. With respect to the
damage problem, we introduce a scalar stress-like quantity ω, which is work
conjugate to the phase field φ, and a phase field micro-stress vector ξ, which
is work conjugate to the gradient of the phase field ∇φ. No external traction
is associated with the phase field. We define the kinematics of the body Ω
using the fields u and φ. The corresponding velocities read u and φ, while
the virtual velocities, defined over a vector space V , are denoted by u and φ
[44–46]. Accordingly, the principle of virtual power reads:∫Ω
[σ : ∇u + ωφ+ ξ · ∇φ
]dV =
∫∂Ω
(T · u) dS +
∫Ω
(b · u) dV . (5)
By application of the Gauss divergence theorem and the fundamental
8

lemma of calculus of variations, the local force balances are given by:
∇ · σ + b = 0
∇ · ξ− ω = 0in Ω, (6)
with natural boundary conditions:
σ · n = T
ξ · n = 0on ∂Ω. (7)
2.3. Constitutive theory
We shall now proceed to make suitable constitutive choices for the defor-
mation, fracture and fatigue behaviour of the solid. First, we define the total
potential energy of the solid as the sum of the strain energy density of the
solid ψ and the fracture energy density ϕ, such that:
W (ε (u) , φ, ∇φ) = ψ (ε (u) , g (φ)) + ϕ (φ, ∇φ) , (8)
where g (φ) is a phase field degradation function, to be defined. The Cauchy
stress tensor is then defined as σ = ∂εψ. Thus, the phase field reduces the
stiffness of the solid. However, note that no damage-plasticity coupling term
is defined. The reader is referred to Alessi et al. [47] for a comprehensive
discussion on potential constitutive choices to capture the interplay between
damage and elastic-plastic material behaviour. The strain energy density
includes both elastic and plastic parts, which are computed as follows:
ψ0 = ψe (εe) + ψp (εp) =1
2λ [tr (εe)]2 + µ tr
[(εe)2]+
∫ t
0
(σ0 : εp) dt , (9)
where λ and µ are the Lame parameters and the subscript 0 denotes an
undamaged quantity. In agreement with (4), the fracture energy density is
9

defined as,
ϕ = f(ϑ)GcΥ(φ,∇φ) = f
(ϑ) Gc
4cw`
(w(φ) + `2|∇φ|2
). (10)
Here, w(φ) is the geometric crack function, to be defined, and cw is a scaling
constant, given by
cw =
∫ 1
0
√w(ζ) dζ . (11)
2.3.1. Strain energy decomposition
To prevent the nucleation and growth of cracks under compression, the
strain energy density can be decomposed into tensile and compressive parts
as follows:
ψ (εe, εp, φ) = g (φ)(ψe+ (εe) + ψp (εp)
)+ ψe− (εe) . (12)
We choose to follow the so-called volumetric-deviatoric split proposed by
Amor et al. [48]. Accordingly, for a material with bulk modulus K, the
elastic strain energy density is decomposed as,
ψe+ (ε) =1
2K〈tr (εe)〉2+ + µ
(εe′ : εe′
), ψe− (εe) =
1
2K〈tr (εe)〉2− , (13)
where εe′ denotes the deviatoric part of the elastic strain tensor and 〈 〉 are
the Macaulay brackets.
2.3.2. Karush–Kuhn–Tucker (KKT) conditions
Damage is an irreversible process and, as a consequence, the phase field
evolution law must fulfill the condition φ ≥ 0. To achieve this, we follow
Miehe and co-workers [13, 14] and define a history variable field H. Since
the effective plastic work is assumed to increase monotonically, the history
10

field variable only relates to the elastic fracture driving force, ψe+. Thus, as
dictated by the Karush–Kuhn–Tucker (KKT) conditions, the definition of H
must satisfy:
ψe+ −H ≤ 0, H ≥ 0, H(ψe+ −H) = 0 . (14)
Accordingly, for a current time t, within a total time tt, we define the
history field as,
H = maxt∈[0,tt]ψe+ (t) . (15)
2.3.3. Fatigue damage
The damage resulting from the application of cyclic loads is captured by
means of a fatigue degradation function f(ϑ), a cumulative history variable
ϑ, and a fatigue threshold parameter ϑT . We follow the work by Carrara et
al. [35] on elastic solids and consider two fatigue degradation functions; one
of an asymptotic form:
f(ϑ(t)) =
1 if ϑ(t) ≤ ϑT(2ϑT
ϑ(t)+ϑT
)2
if ϑ(t) ≥ ϑT
(16)
and a second one, of logarithmic form:
f(ϑ(t)) =
1 if ϑ(t) ≤ ϑT[1− κlog
(ϑ(t)ϑT
)]2
if ϑT ≤ ϑ(t) ≤ ϑT101/κ
0 if ϑ(t) ≥ ϑT101/κ
(17)
where κ is a material parameter that characterises the slope of the logarithmic
function. The impact of these choices must be assessed against experiments.
Here, we provide a comparison against testing data on hot-rolled structural
11

steels (see Section 4.1). In addition, the evolution of the fatigue history
variable ϑ is given by,
ϑ(t) =
∫ t
0
H(ϑϑ)|ϑ| dt , (18)
where H(ϑϑ) is the Heaviside function such that ϑ only evolves during load-
ing.
Finally, it remains to define the fatigue threshold parameter ϑT and the
fatigue history variable ϑ. For the latter, we choose to adopt the following
constitutive choice,
ϑ = g (φ) (H + ψp) , (19)
which implies that fatigue damage is driven by both elastic and plastic strain-
ing. This choice is consistent with the definition of a fracture driving force
driven by both elastic and plastic strain energy densities. However, note that
the use of the history field (as opposed to ψe+) aims at minimising the elastic
contribution, as arguably appropriate in the context of low-cycle fatigue. For
the fatigue threshold, we follow Carrara et al. [35] and assume:
ϑT =Gc
12`, (20)
unless otherwise stated.
2.3.4. Micro-force variables
We proceed to derive, without loss of generality, the fracture micro-stress
variables ω and ξ. First, considering (8), (9) and (15), we reformulate the
total potential energy of the solid as,
W = g(φ) (H + ψp) + f(ϑ) Gc
4cw
(w(φ)
`+ `|∇φ|2
). (21)
12

Consequently, the scalar micro-stress ω is defined as:
ω =∂W
∂φ= g′(φ) (H + ψp) + f
(ϑ) Gc
4cw`w′(φ) , (22)
and the phase field micro-stress vector ξ reads,
ξ =∂W
∂∇φ=
`
2cwGcf
(ϑ)∇φ . (23)
The phase field evolution law (6b) can be reformulated by taking into
consideration the constitutive relations (22) and (23), such that
Gcf(ϑ)
2cw
(w′(φ)
2`− `∇2φ
)− Gc`
2cw∇φ∇f
(ϑ)
+ g′(φ) (H + ψp) = 0 . (24)
It is evident from (15) and (24) that the phase field evolution is driven
by both elastic and plastic strain energy densities. This is in agreement with
several phase field models for fracture in elastic-plastic solids [23, 49, 50].
However, other approaches have also been considered in the literature (see,
e.g. [45, 51]) and the choice is not straightforward. From a thermodynamical
perspective, the majority of the energy stored in the solid (and thus available
to facilitate crack growth) is elastic. However, failure in ductile fracture
experiments is often driven by plastic phenomena and a simple energy balance
is not suitable for crack growth processes involving significant plasticity; e.g.,
the assumption of an isothermal process is no longer valid as plastic flow
constitutes a source of heat [32].
2.3.5. Degradation and dissipation functions
Now, we particularise our generalised framework by making specific choices
for the fracture degradation function g(φ), the so-called dissipation function
w(φ) [33, 52, 53] and the fracture driving force threshold Hmin. Our theory
13

captures both brittle and quasi-brittle phase field approaches, accommodat-
ing the so-called AT1, AT2 and PF-CZM models. The AT1 and AT2 models
are based on the Ambrosio and Tortorelli regularisaton of the Mumford-Shah
functional [11, 54], with the former aimed at including a purely elastic re-
sponse up to the onset of damage [55]. The phase field cohesive zone model
PF-CZM employed here is inspired by the work by Wu [56] and Wu and
Nguyen [57], but it employs a fracture driving force based on the strain en-
ergy density, as in Ref. [16]. In other words, fracture is driven by both elastic
and plastic strain energy densities in the three phase field models considered,
as shown in (24).
Firstly, we start by defining the phase field degradation function, which
should satisfy:
g (0) = 1, g (1) = 0, g′ (φ) ≤ 0 for 0 ≤ φ ≤ 1 . (25)
For the AT1 and AT2 models the same choice is adopted; a quadratic degra-
dation function such that,
g (φ) = (1− φ)2 . (26)
While for the PF-CZM model, the following form is used,
g (φ) =(1− φ)2
(1− φ)2 +mφ (1− 0.5φ)with m =
3EGc
2`σ2c
, (27)
where σc is the material strength.
Secondly, we define the dissipation function, which should fulfill the fol-
lowing conditions:
w (0) = 0, w (1) = 1, w′ (φ) ≥ 0 for 0 ≤ φ ≤ 1 . (28)
14

The specific choice w(φ) = φ2 (c = 1/2) recovers the AT2 model while
w(φ) = φ (c = 2/3) renders the AT1 formulation. No threshold for damage
exists in the AT2 case as w′(0) = 0, unlike in the AT1 model. Finally, for
the PF-CZM we have w(φ) = 4φ (cw = 4/3), where w′(0) > 0 - as in the AT1
case. Accordingly, a damage threshold should be defined for both AT1 and
PF-CZM models; the following choices are adopted here,
AT1 : Hmin =3Gc
16`, PF-CZM : Hmin =
σ2c
2E. (29)
Accordingly, in the numerical implementation of the AT1 and PF-CZM
models, the history field is taken to be the maximum of (15) and Hmin.
It is also important to note that the PF-CZM model explicitly incorporates
the material strength σc into the constitutive equations - see (27) and (29)b.
For the AT1 and AT2, a relation between the strength and the phase field
length scale can be derived by considering the homogeneous solution to the
phase field evolution law (see, e.g. Ref. [32]):
AT1 : σc =
√3EGc
8`, AT2 : σc =
3
16
√3EGc
`. (30)
2.3.6. Cyclic deformation: combined isotropic/kinematic hardening
The constitutive choices for relating the stresses to the strains aim at
modelling a general class of elastic-plastic materials. Specifically, a nonlin-
ear combined isotropic/kinematic hardening model is used to capture a wide
range of cyclic plasticity phenomena. The model is based on the work by
Lemaitre and Chaboche [58], where a von Mises yield criterion is combined
with a non-linear description of isotropic and kinematic hardening effects.
15

For a material with current yield stress σY , experiencing a deviatoric
backstress α′, the assumed yield function reads,
F =
√2
3(σ′ −α′) : (σ′ −α′)− σY = 0 , (31)
where the first term is the von Mises effective stress. The flow rule then
reads,
εp = εp∂F∂σ
(32)
where εp is the equivalent plastic strain rate, defined as εp =√
(2/3)εp : εp.
The hardening evolution law includes two components: an isotropic hard-
ening one, describing the change in size of the yield surface, and a kinematic
hardening one, characterising the translation of the yield surface in the stress
space. We employ an exponential isotropic hardening law to relate the change
in yield stress to the equivalent plastic strain εp and the initial yield stress
σ0 as,
σY = σ0 +Q∞ [1− exp (−bεp)] , (33)
where Q∞ is the maximum change in the size of the yield surface and b
determines the rate at which the size of the yield surface changes as the
plastic strain develops. On the other side, kinematic hardening effects are
captured by means of an additive combination of a purely kinematic term,
as in Ziegler’s linear hardening law [59], and a relaxation term, which in-
troduces the non-linearity. The model can accommodate several superposed
backstresses, which can improve predictions. Accordingly, for each backstress
component,
αk =CkσY
(σ −α) εp − γkαkεp with α =N∑k=1
αk , (34)
16

where C and γ are parameters calibrated against experimental data from a
stabilised stress-strain cycle, and N is the number of backstresses. Note that
the maximum change in backstress is controlled by the ratio C/γ, where γ
specifies the rate at which the backstress changes as the plastic strain de-
velops. The model reduces to Ziegler’s linear hardening law when αk = 0
and to an isotropic hardening model when both Ck and γk are zero. On the
other hand, a purely (non-linear) kinematic hardening model is recovered if
σY = σ0. The one-dimensional representation of the non-linear combined
isotropic-kinematic hardening law assumed is shown in Fig. 1. The maxi-
mum uniaxial stress attained is denoted by σmax and αs corresponds to the
magnitude of the backstress at saturation.
σ
α
σ0
σ0
σ0
σY
αs=C
γ
α + σ0
εp0
σmax Combined isotropic-kinematic hardening
Figure 1: Sketch of the stress versus plastic strain response under uniaxial loading to
illustrate the nonlinear combined isotropic/kinematic hardening model.
17

3. Numerical implementation
Details of the numerical implementation are provided here, starting with
the finite element discretisation (Section 3.1), followed by the formulation
of the residuals and the stiffness matrices (Section 3.2), and ending with a
description of the quasi-Newton algorithm employed to enable an efficient and
robust monolithic implementation (Section 3.3). The theoretical framework
outlined in Section 2 is numerically implemented in the commercial finite
element package ABAQUS by developing a user-defined UELMAT subroutine,
this is described in Section 3.41.
3.1. Finite element discretisation
Making use of Voigt notation, the primal kinematic variables of the prob-
lem are discretised in terms of their nodal values ui = ux, uy, uzT and φi
at node i as:
u =m∑i=1
Nui ui and φ =
m∑i=1
Niφi (35)
where m is the total number of nodes per element, Ni is the shape function
associated with node i and Nui is the shape function matrix, a diagonal
matrix with Ni in the diagonal terms. Making use of the corresponding B-
matrices, which contain the derivatives of the shape functions, the discretised
derivatives of u and φ can be expressed as follows,
εεε =m∑i=1
Bui ui and ∇φ =
m∑i=1
Bφi φi . (36)
1The code is available for download at www.empaneda.com/codes.
18

3.2. Residuals and stiffness matrices
Let us now formulate the weak form of the problem. Considering the
principle of virtual power (5) and the constitutive choices described in Section
2, the weak form of the displacement and phase field problems read:∫Ω
[g(φ) + κ
]σ0 : sym∇δu− b · δu
dV +
∫∂Ω
T · δu dS = 0 , (37)∫Ω
g′(φ)δφ (H + ψp) +
Gc
2cwf(ϑ) [w′(φ)
2`δφ− `∇φ∇δφ
]dV = 0 . (38)
Here, σ0 is the undamaged stress tensor and κ is a small, positive constant
used to prevent ill-conditioning when φ = 1; in this work, κ = 1×10−7. Also,
note that a hybrid approach is used, by which the strain energy density split
is only applied to the phase field balance but with φ degrading the total
strain energy density in the linear momentum balance equation [60]. Now,
introduce the discretisation outlined in (35)-(36) into the weak form to derive
the corresponding residuals:
Rui =
∫Ω
[g(φ) + κ] (Bu
i )T σ0 − (Nui )T b
dV −
∫∂Ω
(Nui )T T dS , (39)
Rφi =
∫Ω
g′(φ)Ni (H + ψp) +
Gc
2cw`f(ϑ) [w′(φ)
2Ni + `2 (Bi)
T ∇φ]
dV .
(40)
Finally, we obtain the consistent tangent stiffness matrices K by differ-
entiating the residuals with respect to the incremental nodal variables as
follows:
Kuij =
∂Rui
∂uj=
∫Ω
[g(φ) + κ] (Bu
i )TCepBuj
dV , (41)
Kφij =
∂Rφi
∂φj=
∫Ω
(g′′(φ) (H + ψp) +
Gcf(ϑ)
4cw`w′′(φ)
)NiNj + f
(ϑ) Gc`
2cwBTi Bj
dV ,
(42)
19

where Cep is the elastic-plastic material Jacobian. The global system of
equations then reads, Kuu 0
0 Kφφ
ru
rφ
=
u
φ
(43)
The u and φ solutions can be obtained monolithically (simultaneously)
or following a staggered (sequential) approach. Staggered solution schemes
have been traditionally considered more robust but come at the cost of losing
unconditional stability, requiring the use of sufficiently small load increments
to ensure that the solution does not deviate from the equilibrium one. This
can be a significant bottleneck for phase field fatigue calculations, where er-
rors can accumulate in every cycle. We will show how a robust and efficient
monolithic solution scheme can be achieved by using quasi-Newton methods,
such as the Broyden-Fletcher-Goldfarb-Shanno (BFGS) algorithm [61, 62],
enabling accurate fatigue crack growth estimations. Note that, a require-
ment of the BFGS algorithm described below is that the stiffness matrix is
symmetric and positive-definite. Hence, Kuφ = Kφu = 0.
3.3. A quasi-Newton solution scheme: the BFGS algorithm
Quasi-Newton methods have proven to be very robust when dealing with
non-convex minimisation problems (see, e.g. [63, 64] and Refs. therein).
As opposed to standard Newton approaches, the stiffness matrix K is not
updated after each iteration in quasi-Newton algorithms. Instead, an ap-
proximation of the stiffness is introduced after a given number of iterations
20

without convergence. This approximated stiffness matrix, K, satisfies:
K∆z = ∆r with z =
u
φ
, (44)
Here, ∆z = zt+∆t − zt and ∆r = rt+∆t − rt. We choose to adopt the BFGS
algorithm, in which the approximated stiffness matrix is typically defined as
[65],
K = Kt −(Kt∆z)(Kt∆z)T
∆zKt∆z+
∆r∆rT
∆zT∆r(45)
From a computational perspective, and upon the assumption of a symmetric
stifness matrix, the approximated stiffness matrix can be expressed as follows
[66],
K−1 =
(I− ∆z∆rT
∆zT∆r
)K−1t
(I− ∆z∆rT
∆zT∆r
)−1
+∆z∆zT
∆zT∆r. (46)
In this way, symmetry and positive definiteness are retained. As it can be
observed, if the initial guess is symmetric and positive definite, as in (43),
the updated K is also symmetric and positive definite. The BFGS algorithm
has been implemented in most commercial finite element packages (such as
ABAQUS), often in conjunction with a line search algorithm.
3.4. Details of the ABAQUS implementation
A UELMAT subroutine is used to implement the generalised model into
the commercial finite element package ABAQUS. The UELMAT, similar to
user element (UEL) subroutines, requires defining the element residual and
stiffness matrices, such that the coding resembles that of an in-house code
(ABAQUS is solely used to assemble the global matrices and solve the sys-
tem). However, the UELMAT differs from the UEL in that it enables access to
21

the ABAQUS’s material library (material lib mech). We exploit this to
obtain σ0 and Cep for a given strain tensor. In addition, we use the elastic
compliance tensor to decompose the total strains into their elastic and plastic
counterparts.
4. Results
We proceed to showcase the capabilities of the computational framework
presented by addressing several boundary value problems of particular in-
terest. Firstly, in Section 4.1, the number of cycles to failure is estimated
under uniaxial cyclic loading and compared with experimental predictions
on structural steels. This is accompanied by a parametric study to eval-
uate the role of the various fracture and fatigue parameters of the model.
Secondly, fatigue crack growth in a Compact Tension specimen is predicted,
for different solution schemes and phase field models (Section 4.2). Thirdly,
in Section 4.3, the interplay between damage and isotropic and kinematic
hardening effects is examined in an asymmetrically-notched bar. Finally, we
simulate the structural failure of a pipe-to-pipe connection to showcase the
capabilities of the model for delivering large scale, 3D predictions (Section
4.4).
4.1. Uniaxial tension-compression experiments
The performance of the proposed modelling framework is first investi-
gated under uniaxial cyclic loading, using strain amplitudes of relevance to
low- and extremely low-cycle fatigue applications. Model predictions for var-
ious constitutive choices are compared against experimental measurements
22

of number of cycles to failure on hot-rolled structural steels. As the experi-
ments are conducted on smooth, planar samples under uniaxial loading, the
boundary value problem is essentially one-dimensional. As illustrated in Fig.
2, calculations are conducted on a square plate with characteristic dimension
1 mm, which is taken to be representative of the conditions experienced by
axially loaded test coupons subjected to uniform straining. The square plate
is discretised using a uniform finite element mesh, with the characteristic
element size being in all cases at least four times smaller than the phase
field length scale `. Linear quadrilateral plane strain elements are used. The
vertical displacement is constrained at the bottom of the plate (symmetry
conditions) and the loading is applied by prescribing a symmetric quasi-static
cyclic displacement with a load ratio of R = −1 and a zero mean value, as
shown in Fig. 3. Four strain amplitudes (∆ε/2) are considered: 1%, 3%, 5%
and 7%, which are mainly of interest for LCF and ELCF applications.
23

u
Figure 2: Uniaxial cyclic loading experiments: sketch of a representative piece of material
that is subjected to uniform straining; boundary conditions and finite element mesh.
u(t)
t
loading
unloading
Δu/2
-Δu/2
Figure 3: Loading conditions: piece-wise linear variation of the applied displacement under
constant amplitude. Red segments correspond to loading stages.
The cyclic plasticity behaviour of the material is calibrated against the
experiments by Nip et al. on hot-rolled carbon steels [5, 6]. The combined
non-linear isotropic/kinematic hardening model described in Section 2.3.6
24

must be used to attain a good fit with the experimental data. The magni-
tudes of the isotropic (Q∞, b) and kinematic hardening parameters (C, γ)
that provide the best agreement with the experiments are listed in Table 1,
together with the initial yield stress σ0 and the elastic properties (Young’s
modulus E and Poisson’s ratio ν). Only one backstress is needed. Fig.
4 shows the agreement between the experimental data [5] and the present
model over the first two cycles, for a representative strain amplitude of 1%.
Table 1: Material properties that provide the best fit to the experiments by Nip et al. [5, 6]
on a hot-rolled carbon steel exhibiting combined non-linear isotropic/kinematic hardening
behaviour.
E ν σ0 Q∞ b C γ
[MPa] [-] [MPa] [MPa] [-] [MPa] [-]
215,960 0.3 465 55 2.38 23,554 139
25

-800
-600
-400
-200
0
200
400
600
800
-0.015 -0.01 -0.005 0 0.005 0.01 0.015
Str
ess
[MP
a]
Strain [-]
Model
Experiments (Nip et al., 2010)
Figure 4: Non-linear kinematic/isotropic hardening material model calibration: model
predictions for the first two cycles, compared with the experiments by Nip et al. [5].
The computational results obtained for selected values of the strain ampli-
tude are reported in Fig. 5, using a log-log plot. Computations are performed
using the AT2 model and the asymptotic fatigue degradation function. It is
assumed that the sample has failed when the phase field reaches φ = 0.9.
The magnitude of the material toughness is taken to be equal to Gc = 1000
kJ/m2 and we vary the phase field length scale ` to investigate the role of the
strength and the fatigue threshold; recall (30) and (20), respectively. The
numerical predictions are shown together with experimental data reported
in the literature for carbon steels [67–70] and with the measurements by Nip
et al. [5, 6] on the hot-rolled carbon steel used for calibrating the non-linear
combined isotropic/kinematic hardening model. Overall, a good agreement
26

is attained with the experimental data but differences are observed at low
and high strain amplitudes. The role of the various fatigue and fracture pa-
rameters of the model in changing predictions and improving the agreement
with experiments is discussed below.
0.1
1
10
100
1000
1 10 100 1000 10000
To
tal
Str
ain
Am
pli
tud
e(ε/
2)
[%]
No of cycles to failure ( f) [-]
ℓ =0.4 mmℓ =0.6 mmℓ =0.8 mmℓ =1 mmExperiments (Nip et al., 2010)Other experimental data
Figure 5: Uniaxial cyclic loading experiments: Total strain amplitude (∆ε/2) versus the
number of cycles to failure (Nf ). Numerical results for Gc = 1000 kJ/m2 and selected
values of ` are compared against experimental data for carbon steels, as reported in the
literature [5, 6, 67–70].
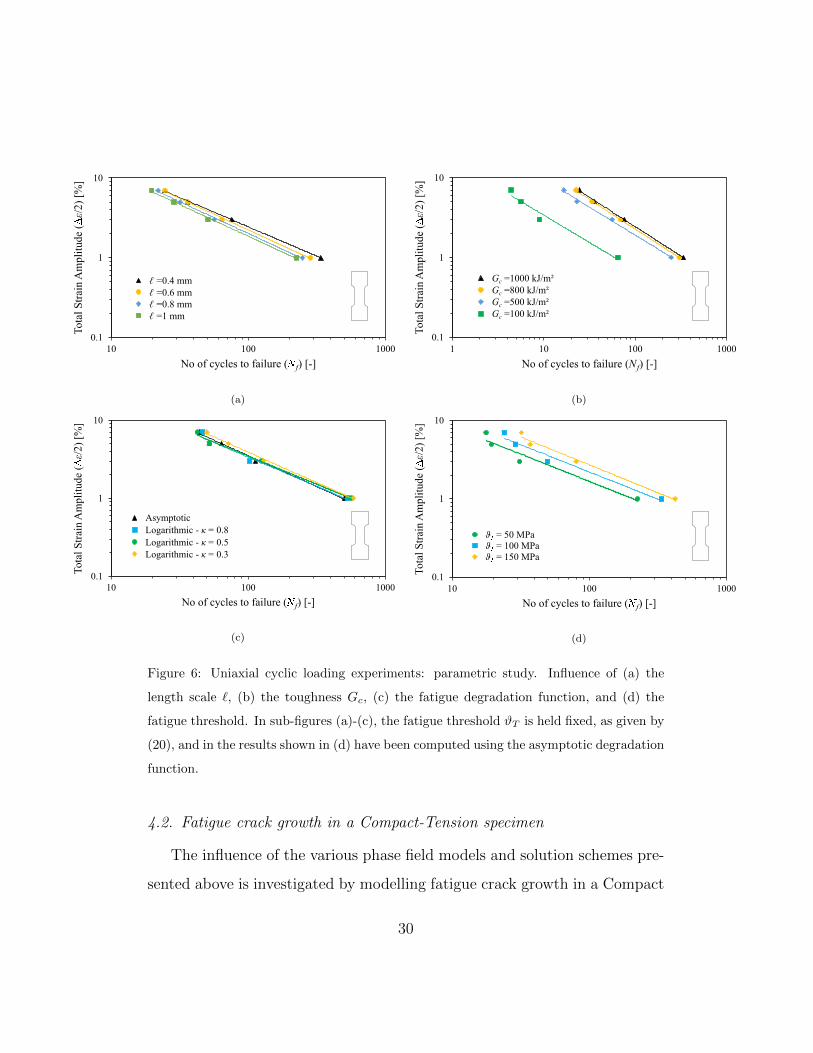
A parametric study is conducted and the results are shown in Fig. 6.
We keep the fatigue threshold ϑT fixed and investigate the influence on the
predictions of the phase field length scale, the fracture energy and the fatigue
degradation function. Consider first Fig. 6a, where the length scale is varied.
It can be observed that a smaller length scale translates into a larger fatigue
27

life for a given strain amplitude. This is due to the relation between ` and
the strength in the AT2 model - see (30)b; the smaller the length scale, the
larger the material strength. It can also be noted that the curves are closer to
each other, relative to the results shown in Fig. 5. The higher sensitivity to `
observed in Fig. 5 is due to the relation between the phase field length scale
and the fatigue threshold, see (20). A smaller value of ` leads to a larger ϑT ,
while in Fig. 6a the magnitude of the threshold is fixed at ϑT = 104.167 MPa
(corresponding to ` = 0.4 mm and Gc = 500 kJ/m2) to isolate the influence
of the phase field length scale. The influence of the material toughness is
evaluated in Fig. 6b for ` = 0.4 mm. Four values of Gc are considered:
100, 500, 800 and 1000 kJ/m2. The results show significant sensitivity for
low Gc values, with the number of cycles to failure increasing with Gc, in
agreement with expectations. However, one should note that the magnitude
of the fracture energy does not typically influence the damage evolution law
of cohesive zone models for fatigue [71, 72]. As for the case of varying `,
changes in Gc do not lead to noticeable variations in the slope of the curve.
The role of the fatigue degradation function is explored in Fig. 6c for the
choices Gc = 1000 kJ/m2 and ` = 0.4 mm. Results are obtained for both
asymptotic (16) and logarithmic (17) degradation functions, and the latter is
assessed for selected values of κ (0.3, 0.5, 0.8). Although differences are small
for the values considered, it can be observed that the slope of the curve is
sensitive to κ, with larger κ values delivering fatigue responses that are more
susceptible to changes in the strain amplitude. Thus, the use of a logarithmic
degradation function provides additional flexibility, enabling a better match
with the experimental results reported in Fig. 5. Finally, the role of the
28

fatigue threshold is investigated in Fig. 6d. While ϑT can be assumed to
depend only on the toughness and the phase field length scale `, as given in
(20) and adopted in Figs. 5a-c, one can also adopt an independent value.
The results obtained reveal a longer fatigue life for higher values of ϑT , in
agreement with expectations.
29
0.1
1
10
10 100 1000
Tota
l S
trai
n A
mpli
tude
(ε/
2)
[%]
No of cycles to failure ( f) [-]
ℓ =0.4 mm
ℓ =0.6 mm
ℓ =0.8 mm
ℓ =1 mm
(a)
0.1
1
10
1 10 100 1000
To
tal
Str
ain
Am
pli
tud
e(ε/2
) [%
]
No of cycles to failure (Nf) [-]
Gc =1000 kJ/m²
Gc =800 kJ/m²
Gc =500 kJ/m²
Gc =100 kJ/m²
(b)
0.1
1
10
10 100 1000
Tota
l S
trai
n A
mpli
tude
(ε/
2)
[%]
No of cycles to failure ( f) [-]
Asymptotic
Logarithmic - κ = 0.8
Logarithmic - κ = 0.5
Logarithmic - κ = 0.3
(c)
0.1
1
10
10 100 1000
Tota
l S
trai
n A
mpli
tude
(ε/
2)
[%]
No of cycles to failure ( f) [-]
ϑ = 50 MPa
ϑ = 100 MPa
ϑ = 150 MPa
(d)
Figure 6: Uniaxial cyclic loading experiments: parametric study. Influence of (a) the
length scale `, (b) the toughness Gc, (c) the fatigue degradation function, and (d) the
fatigue threshold. In sub-figures (a)-(c), the fatigue threshold ϑT is held fixed, as given by
(20), and in the results shown in (d) have been computed using the asymptotic degradation
function.
4.2. Fatigue crack growth in a Compact-Tension specimen
The influence of the various phase field models and solution schemes pre-
sented above is investigated by modelling fatigue crack growth in a Compact
30

Tension (CT) sample. The geometry and dimensions of the sample are shown
in Fig. 7, together with the finite element mesh employed. A total of 19,521
4-node plane strain elements are used, with the characteristic element size
in the crack propagation region being 5 times smaller than the phase field
length scale. The specimen is subjected to symmetric quasi-static cyclic dis-
placement at the pins, with an amplitude of 0.05 mm, a zero mean and a
load ratio of R = −1. The nonlinear combined isotropic/kinematic harden-
ing material model is used, with the material properties described in Table
1. The assumed values for the toughness and the phase field length scale are
Gc = 2.7 kJ/m2 and ` = 0.25 mm, respectively.
u
30
mm
(a)
u30
mm
13
.75
mm
13
.75
mm
Dia 12.5 mm
62.5 mm
50 mm
25 mm
3.1
25
mm
(b)
Figure 7: Fatigue crack growth in a CT specimen: (a) Geometry and boundary conditions
and (b) finite element mesh.
We start by assessing the role of the constitutive choices for the phase
field fracture description. As described in Section 2.3, three options are
considered, corresponding to the so-called AT1, AT2, and PF-CZM models.
In all three cases, the qualitative outcome is in good agreement; as shown in
Fig. 8, the crack propagates in a stable manner along the expected mode I
31

trajectory. However, noticeable differences are observed when evaluating the
crack extension ∆a versus number of cycles N curves, see Fig. 9.
(a) (b) (c)
Figure 8: Fatigue crack growth in a CT specimen. Phase field contours at (a) 12 cycles,
(b) 20 cycles and (c) 28 cycles. These representative results have been obtained with the
AT1 model.
As shown in Fig. 9, fatigue crack growth curves are obtained for AT1,
AT2, and PF-CZM models, with three values of the material strength (σc)
being used in the PF-CZM case. Consider first the results predicted for AT1
and AT2 models; similar fatigue crack growth rates are predicted but the
number of cycles to failure is higher for the AT1 case. This is attributed to
the presence of a damage threshold, which is absent in the AT2 formulation,
and to the higher material strength that results from considering Eq. (30) for
the same Gc and ` values. Specifically, Eq. (30) gives strength values of 935
MPa and 496 MPa for AT1 and AT2, respectively. As a result, the initiation
of crack growth takes place later for the AT1 model, relative to the AT2 one.
We emphasise that the degradation function is independent of ` (and thus of
the strength) for the AT1 and AT2 models, see (26), and consequently fatigue
crack growth rates are similar. However, the PF-CZM model predictions
32

exhibit a different trend. The initiation of crack growth appears to be largely
insensitive to the choice of σc but fatigue crack growth rates differ, with
smaller strength values being associated with larger fatigue lives. This is a
result of the strength dependency of the phase field degradation function in
the PF-CZM model - see (27); for a given φ magnitude, a greater stiffness
degradation will be attained for a higher strength. It is also interesting to
note that the predictions from the AT2 and PF-CZM models coincide when
a strength of σc = 500 MPa is used in the latter - versus σc = 496 MPa
for AT2, if estimated from (30). However, the AT1 result with an estimated
strength of σc = 935 MPa lies between the PF-CZM predictions for σc = 500
and σc = 200 MPa. There is a need to determine the most physically sound
relation between Gc, σc and `, given that the length scale governs the size
of the fracture process zone and thus cannot be purely seen as a numerical
parameter.
33

0
5
10
15
20
25
0 5 10 15 20 25 30 35
Number of Cycles (N) [
500
200
700
-]
Figure 9: Fatigue crack growth in a CT specimen: influence of the phase field formulation.
Crack extension ∆a versus number of cycles N , as predicted by the AT1, AT2, and PF-CZM
models.
The influence of the solution scheme is examined next. Specifically, we
compare the performance of the monolithic quasi-Newton algorithm pre-
sented in Section 3.3 with a single-pass, alternative minimisation staggered
scheme.2. Monolithic approaches are unconditionally stable, implying that
2We note that while staggered and alternative minimisation schemes are occasionally
treated as independent solution strategies in the literature [73], the only difference lies in
the inclusion of theH term. Since it has been reported that enforcing damage irreversibility
via the history field does not influence the results for these kinds of problems [32], we here
treat both approaches as equivalent.
34

results are independent of the number of load increments used. This is not
the case for staggered approaches, and consequently we obtain results for
four load stepping choices: 16, 40, 200 and 400 increments per cycle. As
shown in Fig. 10, the staggered solution converges slowly towards the mono-
lithic one. Even when using 400 load increments per cycle, the fatigue crack
growth curve obtained does not match the monolithic result (obtained with
16 increments per cycle). Differences become very significant when reduc-
ing the number of load increments. Furthermore, convergence problems are
observed for the simulations with a low number of increments (16 and 40 in-
crements per cycle), with calculations stopping after 17 cycles. Thus, these
results show that monolithic quasi-Newton schemes are more robust and
significantly more efficient than widely used staggered schemes, which can
require prohibitive computation times for accurate cycle-by-cycle predictions
of high cycle fatigue.
35

0
5
10
15
20
25
0 5 10 15 20 25 30 35
Number of Cycles (N) [-]
16 inc/cycle - monolithic
400 inc/cycle - staggered
200 inc/cycle - staggered
40 inc/cycle - staggered
16 inc/cycle - staggered
Figure 10: Fatigue crack growth in a CT specimen: influence of the solution scheme. Crack
extension ∆a versus number of cycles N as predicted with a staggered and a monolithic
quasi-Newton scheme. The phase field AT2 model has been used.
4.3. Failure of an asymmetrically-notched plate
We proceed to investigate the interplay between cyclic hardening and
damage by simulating the fatigue failure of an asymmetrically-notched plate.
The geometry, boundary conditions and dimensions (in mm) are shown in
Fig. 11a. The specimen is discretised with a total of 95,854 linear quadri-
lateral plane strain elements. As shown in Fig. 11b, the finite element mesh
is refined along the crack propagation path, with the characteristic element
size being at least four times smaller than the phase field length scale. The
specimen is subjected to a symmetric quasi-static cyclic displacement of am-
36

plitude 0.5 mm, with zero mean and a load ratio of R = −1. The fracture
behaviour is characterised by the AT2 model, with properties Gc = 8000
kJ/m2 and ` = 0.04 mm.
u
50 mm
18 mm
17.5 mm
5 mm
27.5 mm
(a) (b)
Figure 11: Asymmetrically-notched specimen subjected to cyclic axial load: (a) Geometry
and boundary conditions and (b) finite element mesh.
One of the aims of this case study is to assess the role of kinematic and
isotropic hardening effects. Thus, the material constitutive behavior is given
by the non-linear combined isotropic/kinematic hardening model described
in Section 2.3, with the material properties listed in Table 1, but calculations
are also conducted for the cases of purely isotropic hardening (C = γ = 0)
37

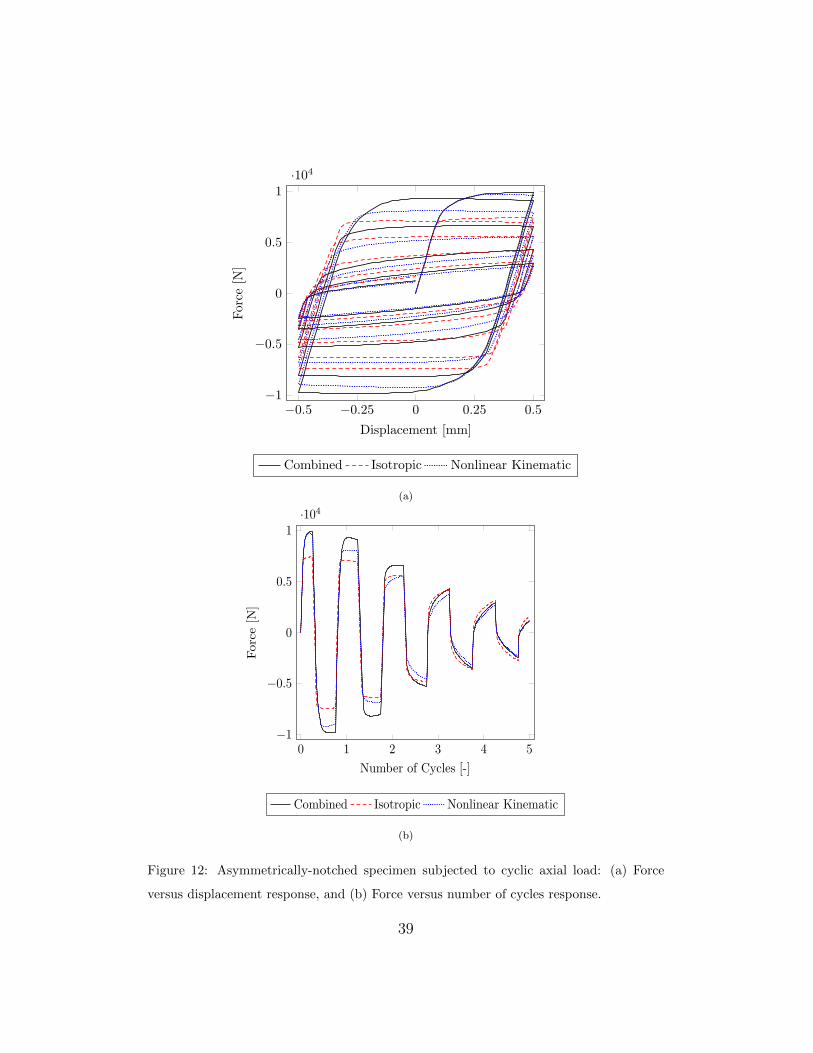
and purely kinematic hardening (σY = σ0). The results obtained for the
three material models under consideration are shown in Fig. 12, in terms
of both the force versus displacement (Fig. 12a) and force versus number
of cycles (Fig. 12b) responses. The results shown in Fig. 12a show how
the values of maximum force attained change more significantly with the
number of cycles when kinematic hardening effects are accounted for, as a
result of the Bauschinger effect. Substantial differences are observed over the
first cycles, highlighting the importance of properly characterising the cyclic
behaviour of the solid. However, the differences between the three models
are reduced as damage starts to govern the material response. As shown in
Fig. 12b, the higher strain energy levels attained with the combined and
non-linear kinematic hardening models result in a faster damage rate, while
damage is underestimated for the purely isotropic hardening case. This is
intrinsic to our choice of an elastic-plastic driving force; see Eqs. (8)-(9).
38
(a)
(b)
Figure 12: Asymmetrically-notched specimen subjected to cyclic axial load: (a) Force
versus displacement response, and (b) Force versus number of cycles response.
39

4.4. Fatigue crack growth in a pipe-to-pipe connection
Finally, we conclude our numerical experiments by demonstrating the ca-
pabilities of the framework presented for predicting large scale fatigue failures
in solids exhibiting combined non-linear isotropic/kinematic hardening. To
this end, fatigue crack nucleation and growth is simulated in a pipe-to-pipe
connection composed of two orthogonal circular pipes - see Fig. 13. The hor-
izontal pipe has an outer diameter of 100 mm and thickness of 8 mm, while
the vertical pipe has on outer diameter of 80 mm and thickness of 6 mm. A
quarter of the geometry is modelled due to symmetry. The domain is dis-
cretised with 10-node tetrahedral solid elements, employing approximately
200,000 degrees-of-freedom. As shown in Fig. 13b, the mesh is refined at
the intersection between the two pipes, where fatigue damage is expected to
take place. The vertical pipe is subjected to symmetric quasi-static cyclic
displacement of amplitude of 0.5 mm with a load ratio of R = −1. The
horizontal pipeline is clamped on one end. The AT-2 phase field damage
model is used along with the nonlinear combined isotropic/kinematic hard-
ening constitutive description. The cyclic deformation is characterised by
the material properties listed in Table 1. The assumed values of Gc and `
are 100 kJ/m2 and 2.5 mm, respectively.
40

u
(a)
125 m
m
Dia. 100 mm
300 mm
(b)
Thick. 8 mm
Dia. 80 mmThick. 6 mm
Figure 13: 3D pipe-to-pipe connection subjected to cyclic axial load: (a) Geometry and
(b) finite element mesh.
The process of crack nucleation and growth is depicted in Fig. 14. Four
stages of the cracking process are shown, from the initiation of damage to
the complete rupture of the pipe-to-pipe connection. We emphasise that no
initial defects are introduced in the model.
41

(a) (b)
(c) (d)
Figure 14: 3D pipe-to-pipe connection subjected to cyclic axial load. Crack surface (φ >
0.9) after: (a) 5 cycles, (b) 8 cycles, (c) 10 cycles and (d) 12 cycles.
Finally, Fig. 15 shows a detailed view of the extent of the crack at the time
of complete failure. The results show that the model can naturally predict
crack growth due to fatigue damage under cyclic loading in three-dimensional
settings for arbitrary geometries and dimensions.
42

Figure 15: 3D pipe-to-pipe connection subjected to cyclic axial load. Detailed plot of the
crack surface (φ > 0.9) at 12 cycles.
5. Conclusions
We have presented a generalised formulation for modelling fatigue crack
growth in elastic-plastic solids. The initiation and growth of cracks is cap-
tured by means of a unified phase field formulation, that incorporates as spe-
43
cial cases the so-called AT1, AT2 and PF-CZM models. Two classes of fatigue
degradation functions (asymptotic and logarithmic) are defined to capture
fatigue damage, which is driven by both elastic and plastic mechanical fields.
The cyclic deformation of the solid is characterised by a combined, non-linear
kinematic/isotropic hardening model that can be used to model the cyclic
response of a general class of elastic-plastic materials. The theoretical frame-
work presented is numerically implemented using the finite element method
and the resulting system of equations is solved in a monolithic manner, by
exploiting a quasi-Newton algorithm. Several 2D and 3D case studies are
modelled to gain insight into the role of the phase field formulation and the
interplay between damage and cyclic hardening effects. Key findings include:
(i) The model provides a good agreement with experimental data on carbon
steels. However, the additional flexibility provided by the logarithmic degra-
dation function is needed to capture the appropriate damage scaling. This
comes at the cost of defining one additional parameter.
(ii) Fatigue crack growth predictions differ between those obtained with phase
field models based on the Ambrosio-Tortorelli functional (AT1, AT2) and
those inspired in cohesive laws, such as the PF-CZM. In the PF-CZM, higher
fatigue crack growth rates are predicted with increasing material strength σc,
due to the σc-dependency of the fracture degradation function.
(iii) The use of quasi-Newton monolithic solution schemes delivers a more ro-
bust and efficient performance than widely-used staggered approaches. The
44

staggered scheme requires over 25 times more load increments to match the
monolithic result. The implications are important, given the inherent cost of
cycle-by-cycle predictions.
(iv) For a crack driving force that includes both elastic and plastic contri-
butions, neglecting kinematic hardening phenomena such as the Bauschinger
effect is non-conservative, and can lead to a significant underestimation of
damage.
The case studies addressed show how the modelling framework presented
can be used to efficiently predict fatigue crack initiation and growth in ar-
bitrary dimensions and geometries, and for solids exhibiting complex cyclic
deformation responses. The finite element code developed can be downloaded
from www.empaneda.com/codes.
6. Acknowledgments
E. Martınez-Paneda acknowledges financial support from the EPSRC
(grant EP/V009680/1) and from the Royal Commission for the 1851 Ex-
hibition (RF496/2018). Z. Khalil acknowledges the MSc Scholarship sup-
port provided by the Department of Civil and Environmental Engineering at
Imperial College London.
References
[1] S. Suresh, Fatigue of Materials, Cambridge University Press, Cambridge,
UK, 1998.
45
[2] A. Wohler, Uber die Festigkeitsversuche mit Eisen und Stahl, Zeitschrift
fur Bauwesen 20 (1870) 73–106.
[3] J. L. Coffin, A study of the effects of cyclic thermal stresses on a ductile
metal, Transactions of the ASME 76 (1954) 931–950.
[4] S. S. Manson, Behavior of materials under conditions of thermal stress,
Tech. rep., National Advisory Committee for Aeronautics (1954).
[5] K. H. Nip, L. Gardner, C. M. Davies, A. Y. Elghazouli, Extremely low
cycle fatigue tests on structural carbon steel and stainless steel, Journal
of Constructional Steel Research 66 (1) (2010) 96–110.
[6] K. H. Nip, L. Gardner, A. Y. Elghazouli, Cyclic testing and numerical
modelling of carbon steel and stainless steel tubular bracing members,
Engineering Structures 32 (2) (2010) 424–441.
[7] A. A. Griffith, The Phenomena of Rupture and Flow in Solids, Philo-
sophical Transactions A, 221 (1920) 163–198.
[8] G. R. Irwin, Onset of Fast Crack Propagation in High Strength Steel
and Aluminum Alloys, in: Sagamore Research Conference Proceedings
Vol. 2, 1956, pp. 289–305.
[9] G. A. Francfort, J.-J. Marigo, Revisiting brittle fracture as an energy
minimization problem, Journal of the Mechanics and Physics of Solids
46 (8) (1998) 1319–1342.
[10] D. Mumford, J. Shah, Optimal approximations by piecewise smooth
46
functions and associated variational problems, Communications on Pure
and Applied Mathematics 42 (5) (1989) 577–685.
[11] B. Bourdin, G. A. Francfort, J.-J. Marigo, Numerical experiments in
revisited brittle fracture, Journal of the Mechanics and Physics of Solids
48 (4) (2000) 797–826.
[12] B. Bourdin, G. A. Francfort, J. J. Marigo, The variational approach to
fracture, Springer Netherlands, 2008.
[13] C. Miehe, F. Welshinger, M. Hofacker, Thermodynamically consistent
phase-field models of fracture: Variational principles and multi-field FE
implementations, International Journal for Numerical Methods in Engi-
neering 83 (2010) 1273–1311.
[14] C. Miehe, M. Hofacker, F. Welschinger, A phase field model for rate-
independent crack propagation: Robust algorithmic implementation
based on operator splits, Computer Methods in Applied Mechanics and
Engineering 199 (45-48) (2010) 2765–2778.
[15] M. J. Borden, C. V. Verhoosel, M. A. Scott, T. J. R. Hughes, C. M.
Landis, A phase-field description of dynamic brittle fracture, Computer
Methods in Applied Mechanics and Engineering 217-220 (2012) 77–95.
[16] R. J. Geelen, Y. Liu, T. Hu, M. R. Tupek, J. E. Dolbow, A phase-
field formulation for dynamic cohesive fracture, Computer Methods in
Applied Mechanics and Engineering 348 (2019) 680–711.
[17] G. Molnar, A. Gravouil, R. Seghir, J. Rethore, An open-source Abaqus
implementation of the phase-field method to study the effect of plasticity
47
on the instantaneous fracture toughness in dynamic crack propagation,
Computer Methods in Applied Mechanics and Engineering 365 (2020)
113004.
[18] R. Alessi, F. Freddi, Failure and complex crack patterns in hybrid lam-
inates: A phase-field approach, Composites Part B: Engineering 179
(2019) 107256.
[19] A. Quintanas-Corominas, A. Turon, J. Reinoso, E. Casoni, M. Paggi,
J. A. Mayugo, A phase field approach enhanced with a cohesive zone
model for modeling delamination induced by matrix cracking, Computer
Methods in Applied Mechanics and Engineering 358 (2020) 112618.
[20] T. K. Mandal, V. P. Nguyen, J.-Y. Wu, A length scale insensitive
anisotropic phase field fracture model for hyperelastic composites, In-
ternational Journal of Mechanical Sciences 188 (2020) 105941.
[21] W. Tan, E. Martınez-Paneda, Phase field predictions of microscopic frac-
ture and R-curve behaviour of fibre-reinforced composites, Composites
Science and Technology 202 (2021) 108539.
[22] M. Ambati, T. Gerasimov, L. De Lorenzis, Phase-field modeling of duc-
tile fracture, Computational Mechanics 55 (5) (2015) 1017–1040.
[23] M. J. Borden, T. J. R. Hughes, C. M. Landis, A. Anvari, I. J. Lee,
A phase-field formulation for fracture in ductile materials: Finite defor-
mation balance law derivation, plastic degradation, and stress triaxiality
effects, Computer Methods in Applied Mechanics and Engineering 312
(2016) 130–166.
48

[24] M. Isfandbod, E. Martınez-Paneda, A mechanism-based multi-trap
phase field model for hydrogen assisted fracture, International Journal
of Plasticity 144 (2021) 103044.
[25] E. Martınez-Paneda, A. Golahmar, C. F. Niordson, A phase field for-
mulation for hydrogen assisted cracking, Computer Methods in Applied
Mechanics and Engineering 342 (2018) 742–761.
[26] F. P. Duda, A. Ciarbonetti, S. Toro, A. E. Huespe, A phase-field model
for solute-assisted brittle fracture in elastic-plastic solids, International
Journal of Plasticity 102 (2018) 16–40.
[27] J.-Y. Wu, T. K. Mandal, V. P. Nguyen, A phase-field regularized cohe-
sive zone model for hydrogen assisted cracking, Computer Methods in
Applied Mechanics and Engineering 358 (2020) 112614.
[28] P. K. Kristensen, C. F. Niordson, E. Martınez-Paneda, Applications of
phase field fracture in modelling hydrogen assisted failures, Theoretical
and Applied Fracture Mechanics 110 (2020) 102837.
[29] Hirshikesh, S. Natarajan, R. K. Annabattula, E. Martınez-Paneda,
Phase field modelling of crack propagation in functionally graded mate-
rials, Composites Part B: Engineering 169 (2019) 239–248.
[30] P. K. A. V. Kumar, A. Dean, J. Reinoso, P. Lenarda, M. Paggi,
Phase field modeling of fracture in Functionally Graded Materials: G -
convergence and mechanical insight on the effect of grading, Thin-Walled
Structures 159 (2021) 107234.
49

[31] J.-Y. Wu, V. P. Nguyen, C. T. Nguyen, D. Sutula, S. Sinaie, S. Bordas,
Phase-field modelling of fracture, Advances in Applied Mechanics 53
(2020) 1–183.
[32] P. K. Kristensen, C. F. Niordson, E. Martınez-Paneda, An assessment
of phase field fracture: crack initiation and growth, Philosophical Trans-
actions of the Royal Society A: Mathematical, Physical and Engineering
Sciences 379 (2021) 20210021.
[33] R. Alessi, S. Vidoli, L. De Lorenzis, A phenomenological approach to
fatigue with a variational phase-field model: The one-dimensional case,
Engineering Fracture Mechanics 190 (2018) 53–73.
[34] Y. S. Lo, M. J. Borden, K. Ravi-Chandar, C. M. Landis, A phase-field
model for fatigue crack growth, Journal of the Mechanics and Physics
of Solids 132 (2019) 103684.
[35] P. Carrara, M. Ambati, R. Alessi, L. De Lorenzis, A framework to model
the fatigue behavior of brittle materials based on a variational phase-field
approach, Computer Methods in Applied Mechanics and Engineering
361 (2020) 112731.
[36] M. Simoes, E. Martınez-Paneda, Phase field modelling of fracture and
fatigue in Shape Memory Alloys, Computer Methods in Applied Me-
chanics and Engineering 373 (2021) 113504.
[37] M. M. Hasan, T. Baxevanis, A phase-field model for low-cycle fatigue
of brittle materials, International Journal of Fatigue 150 (2021) 106297.
50

[38] A. Golahmar, P. K. Kristensen, C. F. Niordson, E. Martınez-Paneda, A
phase field model for hydrogen-assisted fatigue, International Journal of
Fatigue 154 (2022) 106521.
[39] M. Seiler, T. Linse, P. Hantschke, M. Kastner, An efficient phase-field
model for fatigue fracture in ductile materials, Engineering Fracture
Mechanics 224 (2020) 106807.
[40] G. A. Haveroth, M. G. Vale, M. L. Bittencourt, J. L. Boldrini, A non-
isothermal thermodynamically consistent phase field model for damage,
fracture and fatigue evolutions in elasto-plastic materials, Computer
Methods in Applied Mechanics and Engineering 364 (2020) 112962.
[41] J. Ulloa, J. Wambacq, R. Alessi, G. Degrande, S. Francois, Phase-field
modeling of fatigue coupled to cyclic plasticity in an energetic formu-
lation, Computer Methods in Applied Mechanics and Engineering 373
(2021) 113473.
[42] N. Provatas, K. Elder, Phase-Field Methods in Materials Science and
Engineering, John Wiley & Sons, Weinheim, Germany, 2011.
[43] C. Cui, R. Ma, E. Martınez-Paneda, A phase field formulation for
dissolution-driven stress corrosion cracking, Journal of the Mechanics
and Physics of Solids 147 (2021) 104254.
[44] M. E. Gurtin, E. Fried, L. Anand, The Mechanics and Thermodynamics
of continua, Cambridge University Press, Cambridge, UK, 2010.
51

[45] F. P. Duda, A. Ciarbonetti, P. J. Sanchez, A. E. Huespe, A phase-
field/gradient damage model for brittle fracture in elastic-plastic solids,
International Journal of Plasticity 65 (2015) 269–296.
[46] S. Narayan, L. Anand, A gradient-damage theory for fracture of quasi-
brittle materials, Journal of the Mechanics and Physics of Solids 129
(2019) 119–146.
[47] R. Alessi, M. Ambati, T. Gerasimov, S. Vidoli, L. De Lorenzis, Com-
parison of Phase-Field Models of Fracture Coupled with Plasticity, in:
M. C. E. Onate, D. Peric, E. de Souza- Neto (Ed.), Advances in Com-
putational Plasticity, Springer Nature, 2018, pp. 1–21.
[48] H. Amor, J. J. Marigo, C. Maurini, Regularized formulation of the vari-
ational brittle fracture with unilateral contact: Numerical experiments,
Journal of the Mechanics and Physics of Solids 57 (8) (2009) 1209–1229.
[49] C. Miehe, F. Aldakheel, A. Raina, Phase field modeling of ductile frac-
ture at finite strains: A variational gradient-extended plasticity-damage
theory, International Journal of Plasticity 84 (2016) 1–32.
[50] S. S. Shishvan, S. Assadpour-asl, E. Martınez-Paneda, A mechanism-
based gradient damage model for metallic fracture, Engineering Fracture
Mechanics 255 (2021) 107927.
[51] P. K. Kristensen, C. F. Niordson, E. Martınez-Paneda, A phase field
model for elastic-gradient-plastic solids undergoing hydrogen embrittle-
ment, Journal of the Mechanics and Physics of Solids 143 (2020) 104093.
52

[52] J. Bleyer, R. Alessi, Phase-field modeling of anisotropic brittle fracture
including several damage mechanisms, Computer Methods in Applied
Mechanics and Engineering 336 (2018) 213–236.
[53] Y. Navidtehrani, C. Betegon, E. Martınez-Paneda, A Unified Abaqus
Implementation of the Phase Field Fracture Method Using Only a User
Material Subroutine, Materials 14 (8) (2021) 1913.
[54] L. Ambrosio, V. M. Tortorelli, Approximation of functionals depending
on jumps by elliptic functionals via gamma-convergence, Communica-
tions on Pure and Applied Mathematics 43 (1991) 999–1036.
[55] K. Pham, H. Amor, J. J. Marigo, C. Maurini, Gradient damage models
and their use to approximate brittle fracture, International Journal of
Damage Mechanics 20 (4) (2011) 618–652.
[56] J.-Y. Wu, A unified phase-field theory for the mechanics of damage and
quasi-brittle failure, Journal of the Mechanics and Physics of Solids 103
(2017) 72–99.
[57] J.-Y. Wu, V. P. Nguyen, A length scale insensitive phase-field damage
model for brittle fracture, Journal of the Mechanics and Physics of Solids
119 (2018) 20–42.
[58] J. Lemaitre, J.-L. Chaboche, Mechanics of solid materials, Vol. 19, Cam-
bridge University Press, New York, 1990.
[59] H. Ziegler, A modification of Prager’s hardening rule, Quarterly of Ap-
plied Mathematics 17 (1) (1959) 55–65.
53

[60] M. Ambati, T. Gerasimov, L. De Lorenzis, A review on phase-field mod-
els of brittle fracture and a new fast hybrid formulation, Computational
Mechanics 55 (2015) 383–405.
[61] J.-Y. Wu, Y. Huang, V. P. Nguyen, On the BFGS monolithic algorithm
for the unified phase field damage theory, Computer Methods in Applied
Mechanics and Engineering 360 (2020) 112704.
[62] P. K. Kristensen, E. Martınez-Paneda, Phase field fracture modelling us-
ing quasi-Newton methods and a new adaptive step scheme, Theoretical
and Applied Fracture Mechanics 107 (2020) 102446.
[63] D. H. Li, M. Fukushima, A modified BFGS method and its global con-
vergence in nonconvex minimization, Journal of Computational and Ap-
plied Mathematics 129 (1-2) (2001) 15–35.
[64] A. S. Lewis, M. L. Overton, Nonsmooth optimization via quasi-Newton
methods, Mathematical Programming 141 (1-2) (2013) 135–163.
[65] M. Geradin, S. Idelsohn, M. Hogge, Computational strategies for the
solution of large nonlinear problems via quasi-newton methods, Com-
puters and Structures 13 (1-3) (1981) 73–81.
[66] H. Matthies, G. Strang, The solution of nonlinear finite element equa-
tions, International Journal for Numerical Methods in Engineering 14
(1979) 1613–1626.
[67] R. W. Smith, M. H. Hirschberg, S. S. Manson, Fatigue behavior of
materials under strain cycling in low and intermediate life range, Tech.
rep., NASA (1963).
54

[68] D. Lefebvre, F. Ellyin, Cyclic response and inelastic strain energy in low
cycle fatigue, International Journal of Fatigue 6 (1) (1984) 9–15.
[69] Y. Gong, M. Norton, Cyclic Response and Fatigue of Steels Subjected to
Strain Control with Non-Zero Means, Journal of Testing and Evaluation
27 (1) (1999) 15–30.
[70] X. Yang, Low cycle fatigue and cyclic stress ratcheting failure behavior
of carbon steel 45 under uniaxial cyclic loading, International Journal
of Fatigue 27 (9) (2005) 1124–1132.
[71] K. Roe, T. Siegmund, An irreversible cohesive zone model for interface
fatigue crack growth simulation, Engineering Fracture Mechanics 70 (2)
(2003) 209–232.
[72] S. del Busto, C. Betegon, E. Martınez-Paneda, A cohesive zone frame-
work for environmentally assisted fatigue, Engineering Fracture Mechan-
ics 185 (2017) 210–226.
[73] E. Storvik, J. W. Both, J. M. Sargado, J. M. Nordbotten, F. A. Radu, An
accelerated staggered scheme for variational phase-field models of brittle
fracture, Computer Methods in Applied Mechanics and Engineering 381
(2021) 113822.
55









![FATIGUE CRACK INITIATION AND PROPAGATION IN … Library/101. Fatigue Crack... · 3 or predict fatigue life [15, 20]. In this paper we have conducted a detailed examination of fatigue](https://img.dokumen.tips/doc/110x75/5ab7a8aa7f8b9ad5338bd8f5/fatigue-crack-initiation-and-propagation-in-library101-fatigue-crack3-or.jpg)



















