Embed Size (px)
Citation preview

A Fuzzy Goal Programming Formulation with MultipleTarget Levels
HOCINE MOUSLIMa*, MUSTAPHA BELMOKADDEMb, MOHAMED BENBOUZIANEband SAKINA MELLOULbaMaghnia Annex, Faculty of Management and Economics, University of Tlemcen, Tlemcen, AlgeriabFaculty of Management and Economics, University of Tlemcen, Tlemcen, Algeria
ABSTRACT
The essential activity of a manager is decision making, which is becoming more and more complex, mainly in the multi-criteria problems. Multi-choice goal programming (MCGP) is considered as a robust tool in operational research to solve thistype of problem. However, in real world problems, determining precise targets for the goals is a difficult task. To deal withsuch situation, Tabrizi introduced and used in 2012 the concept of membership functions in the MCGP model in order tomodel the targets fuzziness of each goal. In their model, they considered just only one type of functions (triangular form),which does not reflect adequately the decision maker’s preferences that are considered as an essential element for modellingthe goal’s fuzziness. Their model is called Fuzzy MCGP. In this paper, new ideas are presented to reformulate MCGP modelto tackle all types of functions by introducing the (decision maker’s) preferences. The concept of indifference thresholds isused in the new formulation for characterizing the imprecision and the preferences associated with all types of the goals. Theproposed formulation provides useful insight about the solution of a new class of problems. A numerical example is given todemonstrate the validity and strength of the new formulation. Copyright © 2013 John Wiley & Sons, Ltd.
KEY WORDS: fuzzy goal programming; multi-choice aspiration level; multiple target levels; indifference thresholds;multi-target functions
1. INTRODUCTION
In the past three decades, various algorithms have beenused and several approaches have been suggested tosolve real world decision making problems withmultiple objectives. Goal programming (GP) is oneof the most powerful multiple objective methods thathas been applied in much varied fields. The initialdevelopment of the concept of GP was dealt withby Charnes and Cooper (1961), in a discussion. GPcan be considered as a mathematical programmingmethod and a member of the multi-criteria decisionmaking family. GP and linear programming performsignificant differences by giving an advantage to GP,which is due to the greater scale of problems that isapplied Zeleny (1981).
In fact, the GP model is based on a satisfactionphilosophy and may be seen as a human beingexpression technique (Aouni et al., 2010). It laterbecomes the most popular model of the multi-objective
programming. Its popularity is because of the fact thatit is a simple model, easy to apply. The variants of GPare numerous and contain many different subareas thatcan bewilder practitioners with no knowledge of GPbut wish to apply it to their multi-objective real-worldsituation. However, in real-world Multi-ObjectiveDecision Making problems, it is difficult for decisionmakers (DMs) (managers) to determine precisely thetarget value for the goal because the incompleteinformation (Yaghoobi and Tamiz, 2007).
The basic principles of decision making in fuzzyenvironments were set by Zadeh (1965), and Bellmanand Zadeh (1970). The use of membership functionsin the GP based on the fuzzy set theory was firstcarried out by Zimmermann (1976; Zimmermann,1978; Zimmermann, 1983) and Narasimhan (1983),further extensions were provided by Hannan (1981a;1981b), Ignizio (1982a; 1982b), Tiwari et al. (1987),Mohamed (1997), Chen and Tsai (2001), Yaghoobiand Tamiz (2007), and Li and Hu (2009).
Hannan (1981a) proposed a fuzzy logic basedmethodology that employs piecewise linear functions,which represent DM satisfaction by attaining goalvalues. A different approach is proposed by Tiwariet al. (1987). The authors considered an additive FGP
*Correspondence to: Hocine Mouslim, Faculty of Manage-ment and Economics, Tlemcen University, Tlemcen, Algeria.E-mail: [email protected]
Copyright © 2013 John Wiley & Sons, Ltd.Received 01 May 2013
Accepted 21 October 2013
JOURNAL OF MULTI-CRITERIA DECISION ANALYSISJ. Multi-Crit. Decis. Anal. (2013)Published online in Wiley Online Library(wileyonlinelibrary.com) DOI: 10.1002/mcda.1511

model with relative importance of commensurablegoals. The model included a single objective functiondefined as the weighted sum of achievement degreesof the goals with respect to their target values. Basedon piecewise linear approximation, Yang et al.(1991) have further formulated the problem with fewervariables, which can yield to the same solutions asNarasimhan’s and Hannan’s model. Kim and Whang(1998) have proposed an FGP formulation where theconcept of tolerances is introduced to express the fuzzygoals of the DM instead of using the conventionalmembership functions. Chen and Tsai (2001) haveproposed an extension of the additive model to considergoals of different importance and preemptive priorities,where relative importance of goals are modelled bycorresponding desirable achievement degrees. Recently,Yaghoobi and Tamiz (2007) have proposed a moreefficient formulation and they have highlighted the factthat Kim and Whang’s model (1998) is different fromHannan’s model (1981a; 1981b). A comprehensiveoverview of the current state of the art in FGP can befound in Aouni et al. (2010), Hung-Wen Cheng (2013).
In the reviewed GP and FGP models, the DMconsiders one target for each goal. However, in the realworld situations, there may exist situations where theDM is interested in establishing multi-aspiration levelsfor each goal. To solve this type of problem, Chang(2007a) has recently proposed a new method calledmulti-choice GP (MCGP) for multi-objective decisionproblems, which allows DMs to set multi-choiceaspiration levels for each goal. He revised his approach(Chang, 2007a; Chang, 2008) to make understandingand implementation of linear programming packagesfor solving such problems easier. Also, Ustun (2012)presented the formulation of MCGP by introducingthe concept of the conic scalarizing functions.
The earliest MCGP formulations consider the targetsas precise, deterministic and well known. Nevertheless,in some of the decision-making problems, there mayexist situations that the DM could not be interested inpresenting his preferred targets in a precise manner,and he does not have complete information of someparameters (i.e. the parameters can be fuzzy, impreciseor stochastic). To tackle such situation, Tabrizi et al.(2012) have lately reformulated MCGP model byintroducing the concept of the conventional membershipfunctions for modelling the targets fuzziness of eachgoal. In their model, which is called fuzzy multi-choiceGP (FMCGP), only the type of triangular membershipfunctions TMFs is used.
The authors of this paper stress on the fact thatFMCGP is limited to specific cases where the DM issupposed to have one kind of membership functions
like a triangular form. The use of such triangularfunctions was mainly criticized by Martel and Aouni(1990, 1998), Wang and FU (1997), and Pal andMoitra(2003). These criticisms lie in the fact that this type offunction (triangular) does not reflect the DM’spreferences and not the way for modelling the targetsin a fuzzy environment. In addition, this sort of functionhas some bias to the central values of the targets’ levels.Moreover, Chen and Tsai (2001) indicated that in someapplications, the triangular functions lead to nondesirable results. Indeed, in the real-world problems,there are many forms of multi-target functions MTFsthat should be involved in MCGP formulation in animprecise environment in which the DM’s preferencesare taken into consideration similar to the use of utilityfunctions proposed by Chang (2011) or the satisfactionfunctions suggested by Martel and Aouni (1990).
To deal with such situation, an additive model,which is called fuzzy GP with multiple target levels(FGP-MTL) is presented in this paper to reformulateMCGP in an imprecise manner by using all forms ofthe functions in which the concept of MTFs is intro-duced for characterizing the goals fuzziness.We believethat the model developed in this paper (FGP-MTL) canbe regarded as more general than FMCGP formulation.Therefore, GP, FGP, MCGP and FMCGP are consi-dered as special cases of FGP-MTL.
The rest of this article is organized as follows. InSection 2, FMCGP model is described and discussed.Section 3 presents a new method for FGP-MTLmodel. A numerical example is given in Section 4 toillustrate the efficiency and flexibility of the presentedmethod. Finally, we conclude this study in Section 5.
2. FUZZY MULTI-CHOICE GOALPROGRAMMING
2.1. Fuzzy goal programmingApplying fuzzy set theory in GP has the advantagethat the DM is allowed to specify imprecise aspirationlevels. An objective with an imprecise aspiration levelcan be treated as a fuzzy goal. Yaghoobi et al. (2008)and Jones and Tamiz (2010) suggested four types offuzzy goals, which are developed by the authors in ageneral form of FGP models as follows:
OPT f i xð Þ≤̃ t�i or f i xð Þ � pi≤t�i pi≤Δþ
i
� �i ¼ 1;…; α
(1)
f i xð Þ≥̃t�i or f i xð Þ þ ni≥t�i ni≤ Δ�i
� �i ¼ αþ 1;…; β
(2)
H. MOUSLIM ET AL.
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda

f i xð Þ≅ t�i or f i xð Þ þ ni � pi ¼ t�ipi≤Δþ
i ; ni≤Δ�i
� �i ¼ β þ 1;…; δ
(3)
f i xð Þ ∈̃ t�i1; t�i2
� �or
f i xð Þ � pi≤ t�i2f i xð Þ þ ni≥ t�i1
� �pi≤Δþ
i2; ni≤Δ�i1
� �i ¼ δþ 1;…; k
(4)
where
• OPT means finding an optimal decision x such thatall fuzzy goals are satisfied as much as possible
• f i xð Þ ¼Xnj¼1
aijxj; i ¼ 1;…; k
• for i ¼ 1;…; k; t�i is the imprecision target ofthe ith goal;
• Δ�i and Δþ
i are the constants of deviation in relationto the targets t�i . They are chosen by the DM(manager) or tolerances in a technical process Kimand Whang (1998), Kim et al. (2002). Therefore,the constraint pi≤Δþ
i
� �or ni≤Δþ
i
� �means that
the ith goal is an imprecise or fuzzy goal.
The FGP formulation was initially proposed byZimmermann (1978). In this formulation, he used theconcept of the membership function. This conceptwas developed in the research works of Narasimhanand Hannan. Recently, Yaghoobi et al. (2008) haveproposed a more efficient formulation, and they havesuggested an additive FGP formulation as follows:
Max Z ¼Xki¼1
Ui M1ð Þ
s:t: Ui≤1� f i xð Þ � t�iΔþi
i ¼ 1;…; α
Ui≤1� t�i � f i xð ÞΔ�i
i ¼ αþ 1;…; β
Ui≤1� f i xð Þ � t�iΔþi
i ¼ β þ 1;…; δ
Ui≤1� t�i � f i xð ÞΔ�i
i ¼ β þ 1;…; δ
Ui≤1� f i xð Þ � t�i2Δþi2
i ¼ δþ 1;…; k
Ui≤1� t�i1 � f i xð ÞΔ�i1
i ¼ δþ 1;…; k
x∈X0≤Ui≤1: i ¼ 1;…; k
whereUi represents the membership function that can beregarded as the achievement degrees of the fuzzy goals.
Basing on the concept of deviational variables inGP model, (M1) can be rewritten as follows:
Max Z ¼Xki¼1
Ui M2ð Þ
s:t: f i xð Þ � pi ≤ t�i i ¼ 1;…; αð Þf i xð Þ þ ni ≥ t�i i ¼ αþ 1;…; βð Þf i xð Þ þ ni � pi ¼ t�i i ¼ β þ 1;…; δð Þf i xð Þ � pi ≤ t�i2 i ¼ δþ 1;…; kð Þf i xð Þ þ ni ≥ t�i1 i ¼ δþ 1;…; kð Þ
Ui ¼ 1� 1Δþi
pi
� i ¼ 1;…; αð Þ
Ui ¼ 1� 1Δ�i
ni
� i ¼ αþ 1;…; βð Þ
Ui ¼ 1� 1Δ�i
ni þ 1Δþi
pi
� i ¼ β þ 1;…; kð Þ
x∈XUi;Δ�
i ;Δþi ; ni and pi ≥ 0: i ¼ 1;…; kð Þ
This formulation incorporates an equivalent linearrepresentation of the following membership functions:
2.2. Fuzzy multi-choice goal programmingIn the standard MCGP proposed by Chang (2007a,2008), the target values are assumed to be deter-ministic or precise. However, in several applicationsituations, the DM does not have complete infor-mation of some parameters and in particular the targetvalues (i.e. the targets of each goal can be fuzzy orimprecise). To solve this type of problems, Tabriziet al. (2012) introduced the concept of the mem-bership functions in order to model the fuzzy targetsfor each goal.
In their model, they have used only one form ofthose functions, which is called TMFs, in which theDM’s preferences are not taken into account, knowingthat these preferences are considered to be an essentialelement for modelling the goals in an impreciseenvironment. The use of triangular form was criticisedby many authors such as Martel and Aouni (1998),Chen and Tsai (2001), Pal and Moitra (2003),Yaghoobi and Tamiz (2007), and Yaghoobi et al.(2008), because, in fact, the triangular functions areoften established without the DM and are, by theirnature, very different from his preference functions.Besides, in some applications, this type of functionleads to non desirable results and does not reflect theDM’s preferences.
FUZZY GOAL PROGRAMMING WITH MULTIPLE TARGETS
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda

In their paper, Tabrizi et al. (2012) presented aFMCGP formulation by using TMF type and theysuggested three cases:
(i) The first case, which is shown in the article ofTabrizi et al. (P2, Fig. 1), normally means FGPmodel and not FMCGP model, with three goalsbecause each goal contains only one fuzzy targetof a TMF form.
(ii) Concerning the second case, they have proposed aFMCGP formulation where all the types of themembership functions are considered to betriangular in form. In this case, the concept ofFMCGP appears because each goal contains twofuzzy targets, which can be modelled as follows:
Max U1 þ U2 þ U3 M3ð Þ
s:t: : U1≤1� f 1 xð Þ � t�1Δþ11
z1 þ f 1 xð Þ � t�2Δþ21
1� z1ð Þ �
U1≤1� t�1 � f 1 xð ÞΔ�11
z1 þ t�2 � f 1 xð ÞΔ�21
1� z1ð Þ �
U2≤1� f 2 xð Þ � t�3Δþ32
z2 þ f 2 xð Þ � t�4Δþ42
1� z2ð Þ �
U2≤1� t�3 � f 2 xð ÞΔ�32
z2 þ t�4 � f 2 xð ÞΔ�42
1� z2ð Þ �
U3≤1� t�5 � f 3 xð ÞΔ�53
z3 þ t�6 � f 3 xð ÞΔ�63
1� z3ð Þ �
U3≤1� f 3 xð Þ � t�5Δ�53
z3 þ f 3 xð Þ � t�6Δ�63
1� z3ð Þ �
Figure 1. Linear membership functions.
Figure 2. Triangular isosceles membership function with multi targets.
H. MOUSLIM ET AL.
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda

where
• Ui (i= 1, 2, 3) represents the triangular symmetricmembership function (TSMFs) associated to thetargets t* of the ith goal;
• zi (i= 1, 2, 3) are binary variables;• The rest of the other variables and symbols aredefined in the FGP model previously.
This formulation can be represented graphically for eachmembership function Ui which is shown in Figure 2as follows:As it can be seen in the aforementioned(Figure 2) figure that each membership functionUi (i=1, 2, 3) takes the triangular form and isosceles(symmetric), which is considered as a particular case ofthe formsofmembership functions.Inaddition,U2 andU3
in the aforementioned formulation are considered as arepetition of U1 because they represent the same typeof membership functions (triangular form).
(iii) The third case contains three goals, and each goalincludes three membership functions of a triangular
type. This case is also considered as a repetition ofcase (ii) in which the concept of FMCGP isapparent. In our opinion, concerning case (iii),Tabrizi et al. (2012) may have wanted to presentthe constraints related to the binary variables.
As we have previously seen, FMCGP modelconsiders the membership functions as triangular inform. Besides, this type of functions favours a centralvalue of the deviation from the targets, and the shapeof these functions is symmetric, and does not reflectthe DM’s preferences.
3. FUZZY GOAL PROGRAMMING WITHMULTIPLE TARGET LEVELS (FGP-MTL)
The previous formulation of FMCGP does not considerthe role of the DM (manager) involvement in theprocess of modelling (i.e. the DM’s preferencesstructure has not been introduced in FMCGPformulation in an explicit way). Indeed, there are many
Figure 3. Right multi-target function (5).
Figure 4. Left multi-target function (6).
Figure 5. Triangular multi target functions (7).
FUZZY GOAL PROGRAMMING WITH MULTIPLE TARGETS
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda

forms of functions, which are mentioned in Section2, and are not taken into consideration in FMCGPmodel. To the best of our knowledge, no workhas been carried out for solving this typical FGP-MTL problem.
For modelling MCGP with an imprecise nature, wehave reformulated MCGP by introducing all types ofthe functions in which the DMs have to take theirpreferences into account, where the concept of MTFsis introduced in the new formulation. In other words,the indifference thresholds (targets) specified by theDM should be introduced in all types of theconventional membership functions for obtaining newfunctions called MTFs in the sense of fuzzy set theoryor fuzzy satisfaction functions in the sense of DM’spreferences. The indifference thresholds concept is usedfor characterizing the imprecision and the preferencesassociated with the targets of any type of goal, which
means that the DM can allow to express his preferencestructure in the formulation in an explicit way. Thepossible fuzzy multi-target goals are considered in ageneral form of (FGP-MTL) model as follows:
OPT f i xð Þ ≤̃� �
t�i1 or t�i2 or … or t�ir i ¼ 1;…; α
(5)
f i xð Þ ≥̃� �
t�i1 or t�i2 or…or t�ir i ¼ αþ 1;…; β (6)
f i xð Þ ≅ð Þt�i1 or t�i2 or…or t�ir i ¼ β þ 1;…; δ (7)
f i xð Þ ∈̃� �
t�i1; gi1�
or t�ii2; gi2�
or…or t�ir; gir�
i ¼ δþ 1;…; k
(8)
where
• The symbol (∈̃ ) refers to approximately belongs to;• The rest of the other variables and symbols aredefined in the FGP model in Section 2.
In fuzzy set theory, MTFs identify fuzzy subsets.Therefore, fuzzy multi-target goals can be identified asfuzzy sets defined over the feasible set with the MTFs,which are used to express the imprecision of multi-targetgoals as follows:
a. Right multi-target function (RMTFs):
For the above multi-target goal (5), the right multi-target function which appears in Figure 3 is defined asfollows:
where U( fi(x)) is the right multi target function or theconventional membership function with multi-targets,which can be regarded as the achievement degrees ofthe fuzzy multi target goals; Sil(B) represents afunction of binary serial numbers that ensure onlyone target level must be chosen in each goal; and Δþ
ilis the maximum allowable positive deviation fromthe l th target level in the i th goal, respectively.
Therefore, for modelling the aforementioned multi-target goal (5)using the concept of deviational and slackvariables in GP, the FGP and MCGP techniques areused to convert (5) into FGP-MTL problem as follows:
Figure 6. Trapezoidal multi-target function (8).
U f i xð Þð Þ ¼
1 if f i xð Þ≤ t�il
1�Xr
l¼1
f i xð Þ � t�ilΔþil
Sil Bð Þ if t�il ≤ f i xð Þ≤ t�il þ Δþil i ¼ 1;…; α
0 if f i xð Þ≥ t�il þ Δþil
8>>>><>>>>:
H. MOUSLIM ET AL.
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda

MaxXαi¼1
Ui M4ð Þ
s:t f i xð Þ � pi þ si ¼ λ�i1t�i1 þ λ�i2t
�i2 þ…þ λ�irt
�ir
i ¼ 1;…; αð Þλ�i1 þ λ�i2 þ…þ λ�ir ¼ 1 i ¼ 1;…; αð Þ
Ui ¼ 1� λ�i1piΔþi1
� þ λ�i2
piΔþi2
� þ…þ λ�ir
piΔþir
� �i ¼ 1;…; αð Þ
X∈F F is a feasible setð ÞUi≥0: i ¼ 1;…; αð Þ
where pi indicates the positive deviational variablefrom the target level t�il (i= 1,…, α), (l= 1,…, r),r isthe number of targets of the ith goal.
It can be seen that r extra binary variables λ�il shouldbe added to goal (5), knowing that si has the role ofslack variable.
b. Left multi-target function:For the aforementioned multi-target goal (6), the
left multi-target function which is shown in Figure 4is defined as follows:
where Δ�il is the maximum allowable negative deviation
from the l th target level in the i th goal, respectively.For modelling the aforementioned multi-target
goal (6) by using the concept of deviational and slackvariables in GP, the FGP and MCGP techniques are
used to convert (6) into FGP-MTL problem asfollows:
MaxXβi¼αþ1
Ui M5ð Þ
s:t f i xð Þ þ ni � ei ¼ λ�i1t�i1 þ λ�i2t
�i2 þ … þ λ�irt
�ir
i ¼ αþ 1;…; βð Þλ�i1 þ λ�i2 þ … þ λ�ir ¼ 1
i ¼ αþ 1;…; βð Þ
Ui ¼ 1� λ�i1niΔ�i1
� þ λ�i2
ni�i2
� þ…þ λ�ir
ni�ir
� �i ¼ αþ 1;…; βð Þ
X∈ F F is a feasible setð ÞUi ≥ 0: i ¼ αþ 1;…; βð Þ
where ni indicates the negative deviational variablefrom the target level t�il (i= α + 1,…, β).
It can be seen that r extra binary variables λ�il shouldbe added to goal (6), knowing that ei has the role ofslack variable.
c. Triangular multi-target function:
For the above multi-target goal (7), the triangularmulti-target function which appears in Figure 5 isdefined as follows:
U f i xð Þð Þ ¼
1 if f i xð Þ≥ t�il
1�Xr
l¼1
t�il � f i xð ÞΔ�il
Sil Bð Þ if t�il � Δ�il ≤ f i xð Þ≤
0 if f i xð Þ≤ t�il � Δ�il
8>>>>><>>>>>:
t�il i ¼ αþ 1;…; βð Þ
U f i xð Þð Þ ¼
0 if f i xð Þ≤t�il � Δ�il
1�Xr
l¼1
t�il � f i xð ÞΔ�il
Sil Bð Þ if t�il � Δ�il≤f i xð Þ≤t�il
1 if f i xð Þ ¼ t�i1or t�i2 or…or t�ir i ¼ β þ 1;…; δð Þ
1�Xr
l¼1
f i xð Þ � t�ilΔþil
Sil Bð Þ if t�il≤f i xð Þ≤t�il þ Δþil
0 if f i xð Þ≥t�il þ Δþil
8>>>>>>>>>>>><>>>>>>>>>>>>:
FUZZY GOAL PROGRAMMING WITH MULTIPLE TARGETS
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda

For modelling the aforementioned multi-target goal(7) by introducing the concept of deviational and slackvariables in GP, the FGP and MCGP techniques areused to convert (7) into (FGP-MTL) problem asfollows:
MaxXδi¼βþ1
Ui M6ð Þ
s:t f i xð Þ þ ni � pi ¼ λ�i1t�i1 þ λ�i2t
�i2 þ…þ λ�irt
�ir
i ¼ β þ 1;…; δð Þλ�i1 þ λ�i2 þ…þ λ�ir ¼ 1
i ¼ β þ 1;…; δð Þ
Ui ¼ 1�"λ�i1
niΔ�i1þ piΔþi1
� þ λ�i2
niΔ�i2þ piΔþi2
�
þ…þ λ�irniΔ�ir
þ piΔþir
� #i ¼ β þ 1;…; δð Þ
X∈F F is a feasible setð ÞUi≥0: i ¼ β þ 1;…; δð Þ
where ni and pi indicate, respectively, the negative andthe positive deviations from the target level t�il(i= β + 1,…, k).
d. Trapezoidal multi-target function:
For the aforementioned multi-target goal (8), thetrapezoidal multi-target function which is shown inFigure 6 is defined as follows:
U f i xð Þð Þ ¼
0 if f i xð Þ≤t�il � Δ�il
1�Xr
l¼1
t�il � f i xð ÞΔ�il
Sil Bð Þ if t�il � Δ�il ≤f i xð Þ≤t�il
1 f i xð Þ ¼ t�i1 ; gi1� �
or t�ii2 ; gi2� �
or… or t�ir ; gir� �
i ¼ δþ 1;…; k
1�Xr
l¼1
f i xð Þ � gilΔþil
Sil Bð Þ if gil≤f i xð Þ≤gil þ Δþil
0 if f i xð Þ≥gil þ Δþil
8>>>>>>>>>>>>>>>>>>>><>>>>>>>>>>>>>>>>>>>>:
For modelling the aforementioned multi-target goal(8) by incorporating the concept of deviational andslack variables in GP, the FGP and MCGP techniquesare used to convert (8) into FGP-MTL problem asfollows:
MaxXki¼δþ1
Ui M7ð Þ
s:t f i xð Þ þ ni � ei ¼ λ�i1t�i1 þ λ�i2t
�i2 þ…þ λ�irt
�ir i ¼ δþ 1;…; kð Þ
f i xð Þ � pþ si ¼ bi1gi1 þ bi2gi2 þ…þ birgir i ¼ δþ 1;…; kð Þλ�i1 þ λ�i2 þ…þ λ�ir ¼ 1 i ¼ δþ 1;…; kð Þbi1 þ bi2 þ…þ bir ¼ 1 i ¼ δþ 1;…; kð Þ
Ui ¼ 1� λ�i1niΔ�i1
þ λ�i2niΔ�i2
þ…þ λ�irniΔ�ir
� þ bi1
piΔþi1
þ bi2piΔþi2
þ…þ birpiΔþir
� �i ¼ δþ 1;…; kð Þ
X∈F F is a feasible setð ÞUi ≥ 0:
H. MOUSLIM ET AL.
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda
where ni and pi indicate, respectively, the negative andthe positive deviations from the target level t�il or gil(i = δ + 1,…, k).
It can be seen that r extra binary variablesλ�il; and bil should be added to goal (8).
The quadratic terms λ�ilni; bilpi(i= 1,…, k),(l = 1,…, r) can be transformed to linear form Glover(1975), Kettani and Oral (1990) and Chang (2007b).
Then, the general formulation of FGP-MTL canbe expressed of all types of multi-target goals asfollows:
Max Z ¼Xki¼1
Ui FGP�MTLð Þ
subject to : constraints of M4ð Þconstraints of M5ð Þconstraints of M6ð Þconstraints of M7ð ÞUi ≥ 0: i ¼ 1;…; k
X∈ F F is a feasible setð Þ
It is shown that in the general formulation of FGP-MTL, each fuzzy multi-target goal of type (5), (6) and(7) proposed in this section by the authors can bemodelled into three constraints, whereas goal (8)can be modelled in five constraints, such that fuzzygoal (5) contains only one deviational variable, whichrepresents the positive deviation pi, and goal (6)contains the negative deviation ni, whereas goal (7)contains two deviational variables ni, and pi.
Tiwari et al. (1987) suggested a weighted additivemodel by defining the objective function as theweighted sum of achievement degrees of the fuzzygoals with respect to their desirable values. In theirmodel, the weights specified by DM represent therelative importance of the fuzzy objectives.However, this formulation may sometimes leads
opposite results when the relative importance of thegoals is changed. Chen and Tsai (2001) have illustratedthis condition by using an example by Tiwari et al.(1987), and their study allows the DM to determineexplicitly a desirable achievement degree for each ofthe fuzzy goals as their importance. If desirableachievement degrees U�
i
� �for fuzzy multi-target goals
are defined by the DM, then the same method of Chenand Tsai can be introduced into the general formulationof FGP-MTL by adding the constraints Ui≥U�
i
� �,
which means the importance of the goals.As we have previously seen, the proposed
formulation of FGP-MTL is considered as moregeneral than FMCGP formulation because it dealswith all types of functions in which the DM’spreferences are taken into consideration.
In the following section, a numerical example ispresented to demonstrate the validity and strength ofthe new model.
4. AN ILLUSTRATIVE EXAMPLE(MANUFACTURING)
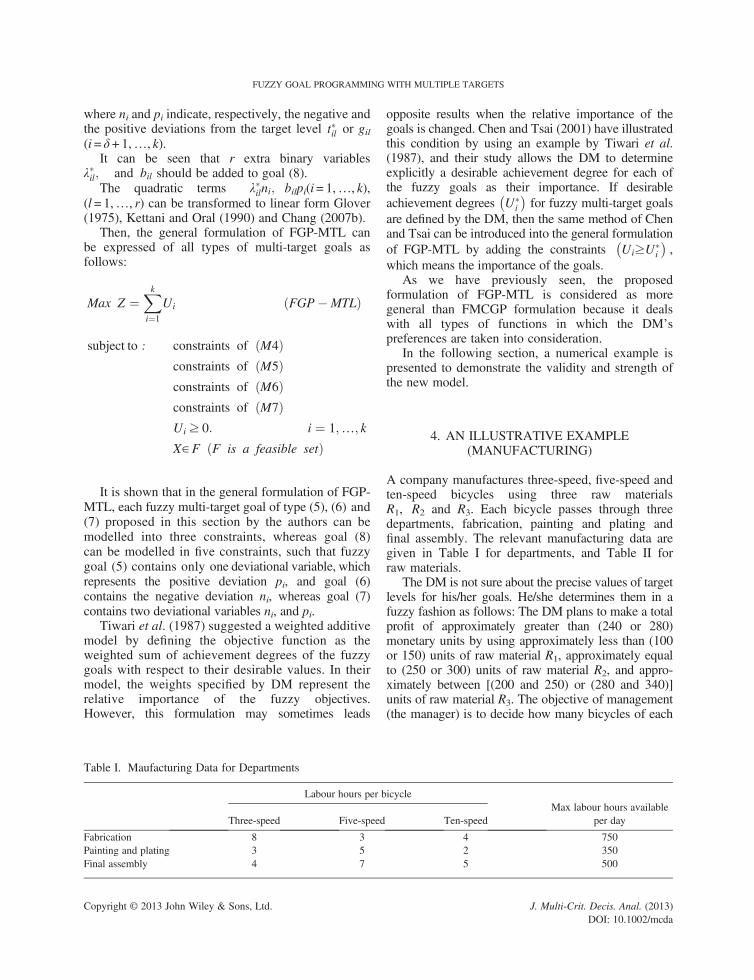
A company manufactures three-speed, five-speed andten-speed bicycles using three raw materialsR1, R2 and R3. Each bicycle passes through threedepartments, fabrication, painting and plating andfinal assembly. The relevant manufacturing data aregiven in Table I for departments, and Table II forraw materials.
The DM is not sure about the precise values of targetlevels for his/her goals. He/she determines them in afuzzy fashion as follows: The DM plans to make a totalprofit of approximately greater than (240 or 280)monetary units by using approximately less than (100or 150) units of raw material R1, approximately equalto (250 or 300) units of raw material R2, and appro-ximately between [(200 and 250) or (280 and 340)]units of raw material R3. The objective of management(the manager) is to decide how many bicycles of each
Table I. Maufacturing Data for Departments
Labour hours per bicycleMax labour hours available
per dayThree-speed Five-speed Ten-speed
Fabrication 8 3 4 750Painting and plating 3 5 2 350Final assembly 4 7 5 500
FUZZY GOAL PROGRAMMING WITH MULTIPLE TARGETS
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda

type should the company manufacture per day in orderto achieve the DM’s goals.
Let: x1 = Number of bicycles of type (three-speed)produced per day
x2 = Number of bicycles of type (five-speed)produced per day
x3 = Number of bicycles of type (ten-speed)produced per day
The above problem can be formulated as an(FGP-MTL) problem as follows:
subject to:
8x1 þ 3x2 þ 4x3≤750 Fabricationð Þ3x1 þ 5x2 þ 2x3≤350 Paiting&platingð Þ4x1 þ 7x2 þ 5x3≤500 Final assemblyð Þx1; x2; x3≥0:
We summarize the aforementioned problem inTable III to include the maximum admissible violations(deviations) for the four multi-target fuzzy goals:
Basing on the linear MTFs, the aforementionedproblem can be formulated using the model of FGP-MTL as follows:
Table III. Type of goals including deviations
Goal 1: raw material(R1) Goal 2: raw material (R2) Goal 3: raw material (R3) Goal 4: profit
Type of goal Right Triangular Trapezoidal Left
Targets 100 150 250 300 200 250 280 340 240 280Deviations 30 20 10 5 15 20 4 5 3 2 12 20fi(x) (i= 1, 2, 3, 4) x1 + 4x2 + 4x3 3x1 + x2 + 4x3 x1 + x2 + 6x3 4x1 + 5x2 + x3
OPT x1 þ 4x2 þ 4x3 ≤̃ 100 or 150 Raw material R1ð Þ3x1 þ x2 þ 4x3≅250 or 300 Raw material R2ð Þx1 þ x2 þ 6x31 ∈̃ 200; 250½ � or 280; 340½ � Raw material R3ð Þ4x1 þ 5x2 þ x3 ≥̃240 or 280 Profitð Þ
Table II. Rlated information about raw materials
Units per bicycle
Three-speed Five-speed Ten-speed
Raw material R1 1 4 4Raw material R2 3 1 4Raw material R3 1 1 6Profit per bicycle 4 5 1
H. MOUSLIM ET AL.
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda

where λ�il , b3l (i= 1, 2, 3, 4) (l= 1, 2), are binaryvariables, and x1, x2, and x3 are considered as generalvariables because they represent the quantity of bicyclesto produce. This problem is solved using LINGO(Schrage, 2008) to obtain the optimal solution as:
It can be seen from the optimal solution that goalsG3, and G4 are completely satisfied, whereas multitarget fuzzy goals G1, and G2 are not completelysatisfied. According to the DM’s preferences, the valueof (Z=3.50 where U1 = 0.55, U2 = 0.95, U3 = 1,and U4 = 1) could be translated in term of a realization
Max Z ¼ U1 þ U2 þ U3 þ U4
s:t: x1 þ 4x2 þ 4x3 � p1 þ s1 ¼ λ�11100� þ λ�12150
�
λ�11 þ λ�12 ¼ 1
U1 ¼ 1� λ�11p130
þ λ�12p120
� �9>>>=>>>;for Goal 1 : raw material R1
3x1 þ x2 þ 4x3 � p2 þ n2 ¼ λ�21250� þ λ�22300
�
λ�21 þ λ�22 ¼ 1
U2 ¼ 1� λ�21n210
þ p25
� �þ λ�22
n215
þ p220
� �h i9>>>=>>>;for Goal 2 : raw material R2
x1 þ x2 þ 6x3 þ n3 � e3 ¼ λ�31200� þ λ�32280
�
x1 þ x2 þ 6x3 � p3 þ s3 ¼ b31250þ b32340
λ�31 þ λ�32 ¼ 1
b31 þ b32 ¼ 1
U3 ¼ 1� λ31n34þ λ32
n33
� �þ b31
p35þ b32
p32
� �h i
9>>>>>>>>>=>>>>>>>>>;for Goal 3 : raw material R3
4x1 þ 5x2 þ x3 þ n4 � e4 ¼ λ�41240� þ λ�42280
�
λ�41 þ λ�42 ¼ 1
U4 ¼ 1� λ�41n412
þ λ�42n420
� �9>>>=>>>;for Goal 4 : profit
8x1 þ 3x2 þ 4x3≤750
3x1 þ 5x2 þ 2x3≤350
4x1 þ 7x2 þ 5x3≤500
9>>=>>;constraints
x1; x2; x3;U1;U2;U3;U4≥0
X∈F F is a feasible setð Þ:
Decision variables : x1; x2; x3ð Þ ¼ 71; 0; 22ð ÞFunction value : Zð Þ ¼ 3:50
Multi Target Function Values : U1;U2;U3;U4ð Þ ¼ 0:55; 0:95; 1; 1ð ÞSlack variables : s1; e3; s3; e4ð Þ ¼ 0; 3; 47; 66ð ÞDeviational variables : p1; n2; p2; n3; p3; n4ð Þ ¼ 9; 0; 1; 0; 0; 0ð ÞBinaryvariables for G1;G2;G3;G4ð Þ : λ�11; λ
�12λ
�21; λ
�22; λ
�31; λ
�32; b31; b32; λ
�41; λ
�42
� � ¼ 0; 1; 0; 1; 1; 0; 1; 0; 1; 0ð Þ
FUZZY GOAL PROGRAMMING WITH MULTIPLE TARGETS
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda

percentage of the goals specified by the manager. Thisvalue ranges from 0 to k (where k represents the numberof the goals). Therefore, the maximum value of Z is thevalue 4, the more globally satisfied the DM should bewith the solution obtained.
5. DISCUSSION AND CONCLUSION
In the FMCGP formulation, the focus is only onthe imprecision related to the goals which aretriangular in form and symmetric, and there is noexplicit modelling of the DM’s preferences. Itwould mean that the DM has a strict preferencefor the central values that will be very difficult tojustify when he has no idea about the exact valuesof the targets.
In this paper, a new method for solving generalFGP-MTL problems is proposed by introducing allthe types of the functions, which exist in the real worldsituations where the MTFs are used that allow the DMto express explicitly his preferences. The properties ofthis new model are stated and proved with thereviewed models. The absolute values of deviationvariables are used in this model and appeared in theoptimal solutions because the DM is interested inusing them for further analysis. Although in theFMCGP model, they are not calculated. The FGP-MTL formulation uses the concept of the indifferencethresholds to characterize the imprecision and thepreferences related to all types of the existing goals.So, we believe that building up FGP-MTL model,where we use the DM’s preferences, can beconsidered as more general than FMCGP formulationwhere we use only TMF.
Therefore, we can consider FGP-MTL model as anextension of FMCGP and MCGP, in which the targetlevels (values) of goals are considered as imprecise,and it can also be regarded as an extension of FGPwith multiple targets of each goal.
So, we can qualify FGP-MTL model as a powerfultool of multi-criterion decision aid.
This model can be extended and developed as afuture project in the case of nonlinearity of MTFsand parameters with intervals.
ACKNOWLEDGMENTS
The authors would like to thank the anonymousreferees for their constructive comments and valuablesuggestions for improvement of the paper.
REFERENCES
Aouni B, Martel JM, Hassaine A. 2010. Fuzzy goalprogramming model: an overview of the current state-of-the art. Journal of multi-criteria decision analysis16: 149–161.
Bellman RE, Zadeh LA. 1970. Decision making in a fuzzyenvironment. Management Science 17(2): 141–164.
Chang CT. 2007a. Binary fuzzy goal programming.European Journal of Operational Research 180: 29–37.
Chang CT. 2007b. Multi-choice goal programming. Omega35: 389–396.
Chang CT. 2008. Revised multi-choice goal programming.Applied Mathematical Modelling 32: 2587–2595.
Chang CT. 2011. Multi-choice goal programming withutility functions. European Journal of OperationalResearch 215: 439–445.
Charnes A, Cooper WW. 1961. Management Models andIndustrial Applications of Linear Programming. vol. 1,John Wiley and Sons: New York.
Chen L-H, Tsai F-C. 2001. Fuzzy goal programming withdifferent importance and priorities. European Journal ofOperational Research 133: 548–556.
Cheng H-W. 2013. A satisfying method for fuzzy goalprogramming problems with different importance andpriorities. Quality & Quantity 47: 485–498.
Glover F. 1975. Improved linear integer programmingformulation of nonlinear integer problems. ManagementScience 22: 455–460.
Hannan EL. 1981a. Linear programming with multiplefuzzy goals. Fuzzy Sets and Systems 6: 235–248.
Hannan EL. 1981b. On fuzzy goal programming. DecisionSciences 12: 522–531.
Ignizio JP. 1982a. On the (re) discovery of fuzzy goalprogramming. Decision Sciences 13: 331–336.
Ignizio JP. 1982b. Notes and communications of the (re)discovery of fuzzy goal programming. Decision Sciences13: 331–336.
Jones DF, Tamiz M. Practical goal programming. SpringerBooks: New York, 2010.
Kettani O, Oral M. 1990. Equivalent formulations ofnonlinear integer problems for efficient optimization.Management Sci. 36: 115–119.
Kim JS, Whang KS. 1998. A tolerance approach to the fuzzygoal programming problems with unbalanced triangularmembership function. European Journal of OperationalResearch 107: 614–624.
Kim JS, Sohn BA, Whang BG. 2002. A toleranceapproach for unbalanced economic developmentpolicy-making in a fuzzy environment. InformationSciences 148: 71–86.
Li S, Hu C. 2009. Satisfying optimization method based ongoal programming for fuzzy multiple objectiveoptimization problem. European Journal of OperationalResearch 197: 675–684.
Martel JM, Aouni B. 1990. Incorporating the decisionmakers preferences in the goal programming model.Journal of Operational Research Society 4: 1121–1132.
H. MOUSLIM ET AL.
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda

Martel JM, Aouni B. 1998. Diverse imprecise goalprogramming model formulations. Journal of GlobalOptimization 12: 127–138.
Mohamed RH. 1997. The relationship between goalprogramming and fuzzy programming. Fuzzy Sets andSystems 89: 215–222.
Narasimhan R. 1983. Goal programming in a fuzzyenvironment. Decision Sciences 11: 325–336.
Pal BB, Moitra BN. 2003. A goal programming procedurefor solving problems with multiple fuzzy goals usingdynamic programming. European Journal of OperationalResearch 144: 480–491.
Schrage L. 2008. Optimization modelling with lingo. LindoSystems Inc.: Chicago.
Tabrizi B-B, Shahanaghi K, Jabalameli M-S. 2012. Fuzzymulti-choice goal programming. Applied MathematicalModelling 36(4): 1415–1420.
Tiwari RN, Dharmar S, Rao JR. 1987. Fuzzy goalprogramming: an additive model. Fuzzy Sets and Systems24: 27–34.
Ustun O. 2012. Multi-choice goal programming formulationbased on the conic scalarizing function. AppliedMathematical Modelling 36: 974–988.
Wang H-F, Fu C-C. 1997. A generalization of fuzzy goalprogramming with pre-emptive structure. ComputersOperational Research 24(9): 19–828.
Yang T, Ignizio JP, Kim HJ. 1991. Fuzzy programming withnonlinear membership unction’s: piecewise linearapproximation. Fuzzy Sets and Systems 41: 39–53.
Yaghoobi MA, Tamiz MA. 2007. A method for solvingfuzzy goal programming problems based on MINMAXApproach. European Journal of Operational Research177: 1580–1590.
Yaghoobi MA, Jones DF, Tamiz M. 2008. Weighted additivemodels for solving fuzzy goal programming problems. Asia-Pacific Journal of Operational Research 25(5): 715–733.
ZadehLA. 1965. Fuzzy sets. Information andControl 8: 338–353.Zeleny M. 1981. The pros and cons of goal programming.
Computers and Operations Research 8(4): 357–359.Zimmermann HJ. 1976. Description and optimization of fuzzy
systems. International Journal of General Systems 2: 209–215.Zimmermann HJ. 1978. Fuzzy programming and linear
programming with several objective functions. Fuzzy Setsand Systems 1: 45–56.
Zimmermann HJ. 1983. Using fuzzy sets in operationsresearch. Fuzzy Sets and Systems 13: 201–216.
FUZZY GOAL PROGRAMMING WITH MULTIPLE TARGETS
Copyright © 2013 John Wiley & Sons, Ltd. J. Multi-Crit. Decis. Anal. (2013)DOI: 10.1002/mcda





















![Fuzzy Linear Programming Model for Critical Path … · Fuzzy Linear Programming Model for Critical Path Analysis ... [13]. Kumar and Kaur [9] ... Linear Programming Formulation of](https://img.dokumen.tips/doc/110x75/5b7811b87f8b9ad3338e7c41/fuzzy-linear-programming-model-for-critical-path-fuzzy-linear-programming-model.jpg)







