Embed Size (px)
Citation preview

A Fast, Scalable Mutual Exclusion Algorithm�
Jae-Heon Yang
Department of Mathematics and Computer Science
Mills College
Oakland, California 94613
James H. Anderson
Department of Computer Science
The University of North Carolina at Chapel Hill
Chapel Hill, North Carolina 27599-3175
October 1993
Revised November 1994
Abstract
This paper is concerned with synchronization under read/write atomicity in shared memory multi-
processors. We present a new algorithm for N -process mutual exclusion that requires only read and write
operations and that has O(logN) time complexity, where \time" is measured by counting remote memory
references. The time complexity of this algorithm is better than that of all prior solutions to the mutual
exclusion problem that are based upon atomic read and write instructions; in fact, the time complexity
of most prior solutions is unbounded. Performance studies are presented that show that our mutual
exclusion algorithm exhibits scalable performance under heavy contention. In fact, its performance rivals
that of the fastest queue-based spin locks based on strong primitives such as compare-and-swap and
fetch-and-add. We also present a modi�ed version of our algorithm that generates only O(1) memory
references in the absence of contention.
Keywords: Fast mutual exclusion, local spinning, mutual exclusion, read/write atomicity, scalability,
synchronization primitives, time complexity.
CR Categories: D.4.1, D.4.2, F.3.1
�Preliminary version was presented at the Twelfth Annual ACM Symposiumon Principles of DistributedComputing, Ithaca,
New York, August 1993. Work supported, in part, by NSF Contracts CCR-9109497 and CCR-9216421 and by the Center for
Excellence in Space Data and Information Sciences (CESDIS).

1 Introduction
The mutual exclusion problem is a paradigm for resolving con icting accesses to shared resources and has
been studied for many years, dating back to the seminal paper of Dijkstra [6]. In this problem, each of a
set of processes repeatedly executes a program fragment known as its \critical section". Before and after
executing its critical section, a process executes two other program fragments, its \entry section" and \exit
section", respectively. The entry and exit sections must be designed so that at most one process executes
its critical section at any time, and so that each process in its entry section eventually executes its critical
section. The former is known as the mutual exclusion property, and the latter as the starvation-freedom
property. In some variants of the problem, starvation-freedom is replaced by the weaker requirement of
livelock-freedom: if some process is in its entry section, then some process eventually executes its critical
section.
Most early solutions to the mutual exclusion problem required only minimalhardware support, speci�cally
atomic read and write instructions. Although of theoretical importance, most such algorithms were judged
to be impractical from a performance standpoint, leading to the development of solutions requiring stronger
hardware support such as read-modify-write operations. The poor performance of early read/write algo-
rithms stems partially from two factors. First, such algorithms are not scalable, i.e., performance degrades
dramatically as the number of contending processes increases. Second, even in the absence of contention,
such algorithms require a process contending for its critical section to execute many operations.
The second of these two problems has been subsequently addressed, speci�cally by Lamport in [9],
where a read/write algorithm is given that requires only a constant number of operations per critical section
acquisition in the absence of contention. Following the title of Lamport's paper, such algorithms have come to
be known simply as \fast mutual exclusion algorithms". This designation is somewhat of a misnomer, as such
algorithms are not necessarily fast in the presence of contention. In fact, the problem of designing a scalable
mutual exclusion algorithm that requires only read/write atomicity, and that exhibits good performance
under contention, has remained open. In this paper, we present such an algorithm.
Many mutual exclusion algorithms that exhibit poor scalability do so, in part, because they require
processes to busy-wait on shared variables that are remotely-accessible, i.e., that require a traversal of the
global interconnect between processors and shared memory when accessed. Recently, several queue-based
mutual exclusion algorithms based on primitives that are stronger than reads and writes have been proposed
in which this type of busy-waiting is avoided [3, 7, 11]. These algorithms are based on the idea of \local
spinning". In particular, processes busy-wait only on locally accessible shared variables that do not require
a traversal of the global interconnect when accessed. Performance studies presented in [3, 7, 11] have
established the importance of local spinning in ensuring good performance under heavy contention.
Although the notion of a locally accessible shared variable may at �rst seem counterintuitive, there
are two architectural paradigms that support it. In particular, on distributed shared memory machines, a
shared variable can be made locally accessible by storing it in a local portion of shared memory, and on
cache-coherent machines, programs can be structured so that when a process busy-waits on a shared variable,
that variable migrates to a local cache line. Note that, because distributed shared memory machines require
static allocation of shared variables to processors, an algorithm that locally spins on such a machine will
also locally spin on cache-coherent machines. The reverse is not necessarily true. For this reason, we adopt
the stricter distributed shared memory model when distinguishing between local and remote shared memory
accesses in the time complexity computations given in this paper. Alternative de�nitions of local and remote
memory accesses based on cache-coherence are brie y considered in Section 6.
In a recent paper [2], Anderson presented a mutual exclusion algorithm that uses only local spins and that
1

requires only atomic read and write operations. In his algorithm, each of N processes executes O(N ) remote
operations to enter its critical section whether there is contention or not. All other previously published
mutual exclusion algorithms that are based on atomic reads and writes employ global busy-waiting and
hence induce an unbounded number of remote operations under heavy contention. Most such algorithms
also require O(N ) remote operations in the absence of contention. Some exceptions to the latter include
the algorithm given by Kessels in [8] and the previously mentioned one given by Lamport in [9]. Kessels'
algorithm generates O(logN ) remote operations in the absence of contention, while Lamport's generates
O(1). A variant of Lamport's algorithm was recently presented by Styer in [14]. Although Styer claims
that his algorithm is more scalable than Lamport's, in terms of time complexity, they are actually very
similar: both generate unbounded remote operations under heavy contention and O(1) operations in the
absence of contention. Styer's claims of scalability are predicated upon complexity calculations that ignore
operations performed within busy-waiting constructs. Because the processes in his algorithm busy-wait on
remote variables, such complexity calculations do not give a true indication of scalability. Another recent
algorithm of interest is one given by Michael and Scott in [12]. Although this algorithm generates O(N )
remote memory references in the presence of contention and O(1) in the absence of contention, it requires
both full- and half-word reads and writes to memory, which is a level of hardware support more powerful
than ordinary read/write atomicity.
In this paper, we present a new mutual exclusion algorithm that requires only atomic reads and writes
and in which all spins are local. Our algorithm induces O(logN ) remote operations under any amount
of contention, and thus is an improvement over the algorithm given by Anderson in [2]. We also present a
modi�ed version of this algorithm, called the \fast-path" algorithm, that requires onlyO(1) remote operations
in the absence of contention. Unfortunately, in the fast-path algorithm, worst-case complexity rises to O(N ).
However, we argue that this O(N ) behavior is rare, occurring only when transiting from a period of high
contention to a period of low contention. Under high contention, the fast-path algorithm induces only
O(logN ) remote operations. It is worth noting that our algorithm and its variation are starvation-free,
whereas some of the aforementioned algorithms are not.
The results of this paper suggest some interesting questions regarding the inherent complexity of syn-
chronization. The queue-based algorithms in [3, 7, 11] require O(1) remote operations, whether there is
contention or not (actually the algorithms in [3, 7] have O(1) complexity only if coherent caches are pro-
vided), whereas our algorithm requires O(logN ) remote operations. It is natural to ask whether this gap is
due to a fundamental weakness of atomic reads and writes, or whether there is a mutual exclusion algorithm
based on such operations that has O(1) complexity (which seems doubtful). A signi�cant step towards an-
swering this question was recently presented by us in [16]. This new result involves programs with limited
\write-contention". The write-contention of a concurrent program is the number of processes that may be
simultaneously enabled to write the same shared variable. It is shown in [16] that for any N -process mutual
exclusion algorithm with write-contention K, there is an execution involving only one process in which that
process executes at least (logK N ) remote memory references in its entry section. This lower bound holds
assuming any of a variety of synchronization primitives, including read, write, test-and-set, load-and-store,
compare-and-swap, and fetch-and-add. Our mutual exclusion algorithm is contained within the class of
algorithms based on such primitives that have constant write-contention. Hence, our algorithm is asymptot-
ically optimal for this class. The execution that establishes the (logK N ) lower bound in [16] involves only
one process, implying that fast mutual exclusion requires high write-contention (i.e., K must approach N ).
All fast mutual exclusion algorithms for N processes presented to date (including the fast-path algorithm
presented in this paper) have write-contention N .
Despite the signi�cance of the lower bound proved in [16], we still do not know whether the apparent
2

gap between mutual exclusion using reads and writes and mutual exclusion using stronger primitives is
fundamental. If the lower bound for mutual exclusion under read/write atomicity turns out to be (logN ),
then an additional question arises: namely, is it possible to develop a mutual exclusion algorithm under
read/write atomicity that requires O(1) remote operations in the absence of contention and O(logN ) remote
operations in the presence of contention? As mentioned above, our fast-path algorithm almost achieves such
bounds.
The rest of the paper is organized as follows. In Section 2, we present our model of concurrent programs.
The above-mentioned mutual exclusion algorithm is then presented in Section 3. In Section 4, we consider the
fast-path algorithm discussed above. In Section 5, we present results from performance studies conducted on
the BBN TC2000 and Sequent Symmetry multiprocessors. These studies indicate that our mutual exclusion
algorithm exhibits scalable performance under heavy contention. In fact, the performance of our algorithm
rivals (and sometimes beats) that of the queue-based algorithms mentioned above. We end the paper with
concluding remarks in Section 6. Correctness proofs for our algorithms are given in an appendix.
2 De�nitions
In this section, we present our model of concurrent programs and de�ne the relations used in reasoning about
such programs. A concurrent program consists of a set of processes and a set of variables. A process is a
sequential program consisting of labeled statements. Each variable of a concurrent program is either private
or shared. A private variable is de�ned only within the scope of a single process, whereas a shared variable
is de�ned globally and may be accessed by more than one process. Each process of a concurrent program
has a special private variable called its program counter : the statement with label k in process p may be
executed only when the value of the program counter of p equals k. For an example of the syntax we employ
for programs, see Figure 1.
A program's semantics is de�ned by its set of \fair histories". The de�nition of a fair history, which is
given below, formalizes the requirement that each statement of a program is subject to weak fairness. Before
giving the de�nition of a fair history, we introduce a number of other concepts; all of these de�nitions apply
to a given concurrent program.
A state is an assignment of values to the variables of the program. One or more states are designated
as initial states. If state u can be reached from state t via the execution of statement s, then we say that
s is enabled at state t and we write ts!u. If statement s is not enabled at state t, then we say that s is
disabled at t. A history is a sequence t0s0!t1
s1!� � �, where t0 is an initial state. A history may be either �nite
or in�nite; in the former case, it is required that no statement be enabled at the last state of the history. A
history is fair if it is �nite or if it is in�nite and each statement is either disabled at in�nitely many states
of the history or is in�nitely often executed in the history. Note that this fairness requirement implies that
each continuously enabled statement is eventually executed. Unless otherwise noted, we henceforth assume
that all histories are fair.
With regard to complexity, we assume that each shared variable is local to at most one process and is
remote to all other processes. This assumption is re ective of a distributed shared memory model. We refer
to a statement execution as an operation. An operation is remote if it accesses remote variables, and is local
otherwise.
Following [5], we de�ne safety properties using unless assertions and progress properties using leads-to
assertions. Consider two predicates P and Q over the variables of a program. The assertion P unless Q
holds i� for any pair of consecutive states in any history of the program, if P ^ :Q holds in the �rst state,
then P _ Q holds in the second. If predicate P is initially true and if P unless false holds, then predicate
3

P is said to be an invariant . We say that predicate P leads-to predicate Q, denoted P 7! Q, i� for each
history t0s0!t1
s1!� � � of the program, if P is true at some state ti, then Q is true at some state tj where j � i.
3 Mutual Exclusion Algorithm
In this section, we present our mutual exclusion algorithm. We begin by stating more precisely the
conditions that must be satis�ed by such an algorithm. In the mutual exclusion problem, there are N
processes, each of which has the following structure.
while true do
Noncritical Section;
Entry Section;
Critical Section;
Exit Section
od
It is assumed that each process begins execution in its noncritical section. It is further assumed that
each critical section execution terminates. By contrast, a process is allowed to halt in its noncritical section.
No variable appearing in any entry or exit section may be referred to in any noncritical or critical section
(except, of course, program counters). A program that solves this problem is required to satisfy the mutual
exclusion and starvation-freedom properties, given earlier in Section 1. We also require that each process in
its exit section eventually enters its noncritical section; this requirement is trivially satis�ed by our solution
(and most others), so we will not consider it further.
As in [8], we �rst solve the mutual exclusion problem for two processes, and then apply our two-process
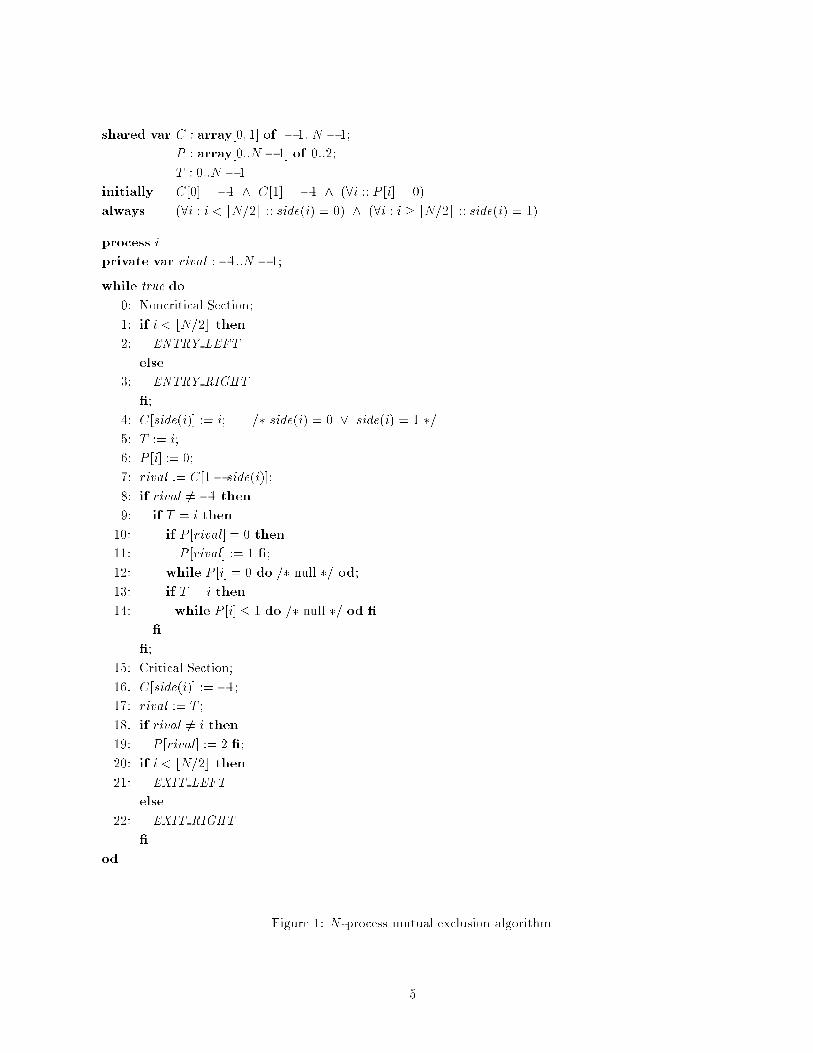
solution in a binary arbitration tree to get an N -process solution. Our algorithm is depicted in Figure 1. In
order to obtain an N -process algorithm, we associate each link in a binary tree with an entry section and
an exit section of the two-process solution. In other words, the entry and exit sections associated with the
two links connecting a given node to its subtree constitute a two-process mutual exclusion algorithm. This
is depicted in Figure 2. Initially, all processes start at the leaves of the tree. To enter its critical section, a
process is required to traverse a path from its leaf up to the root, executing the entry section of each link
on this path. Upon exiting its critical section, a process traverses this path in reverse, this time executing
the exit section of each link.
The �rst mutual exclusion algorithm that used a binary arbitration tree is that given by Peterson and
Fischer in [13]. However, in this algorithm, a process that reaches the top of a left subtree checks all leaves of
the corresponding right subtree, resulting in O(N ) remote memory references outside of busy-waiting loops.
The structure of our arbitration tree is inherited from Kessels's solution in [8], which induces only O(logN )
memory references outside of busy-waiting loops.
In Figure 1, our two-process mutual exclusion algorithm (from statement 4 to statement 19) is placed
\on top" of two (N=2)-process versions of our algorithm. In this �gure, ENTRY LEFT and EXIT LEFT,
denoting the entry and exit sections of the (N=2)-process version of our algorithm, enforce mutual exclusion
in the left subtree. Similarly, ENTRY RIGHT and EXIT RIGHT are used in the right subtree. We depict
the algorithm in this way in order to hide the details relating to how variables are named in the arbitration
tree.
The always section [5] in Figure 1 is used to de�ne the expression side(i). Informally, side(i) = 0 i�
process i is a process from the left subtree, and side(i) = 1 i� process i is a process from the right subtree.
4
shared var C : array[0; 1] of � 1::N � 1;
P : array[0::N � 1] of 0::2;
T : 0::N � 1
initially C[0] = �1 ^ C[1] = �1 ^ (8i :: P [i] = 0)
always (8i : i < bN=2c :: side(i) = 0) ^ (8i : i � bN=2c :: side(i) = 1)
process i
private var rival : �1::N � 1;
while true do
0: Noncritical Section;
1: if i < bN=2c then
2: ENTRY LEFT
else
3: ENTRY RIGHT
�;
4: C[side(i)] := i; =� side(i) = 0 _ side(i) = 1 �=
5: T := i;
6: P [i] := 0;
7: rival := C[1� side(i)];
8: if rival 6= �1 then
9: if T = i then
10: if P [rival] = 0 then
11: P [rival] := 1 �;
12: while P [i] = 0 do =� null �= od;
13: if T = i then
14: while P [i] � 1 do =� null �= od �
�
�;
15: Critical Section;
16: C[side(i)] := �1;
17: rival := T ;
18: if rival 6= i then
19: P [rival] := 2 �;
20: if i < bN=2c then
21: EXIT LEFT
else
22: EXIT RIGHT
�
od
Figure 1: N -process mutual exclusion algorithm.
5

N−process mutual exclusion
mutual exclusion mutual exclusion
ENTRY_RIGHT
Statements 4..14with side(i)=0
Statements 4..14with side(i)=1
ENTRY_LEFT
N/2N/2 −process −process
Figure 2: Entry section of our N -process mutual exclusion algorithm.
The expression 1 � side(i) is used to identify the C-variable of process i's competitor. We assume that
process identi�ers range over f0::N � 1g.
The algorithm employs shared variables, C[0], C[1], and T , in addition to a spin location P [i] for each
process i. Variable C[0] is used by a process from the left subtree to inform processes in the right subtree of
its intent to enter its critical section. Observe that C[0] = i 6= �1 holds while a process from the left subtree
i executes its statements 5 through 16, and C[0] = �1 holds when no process from the left subtree executes
these statements. Variable C[1] is used similarly. Variable T is used as a tie-breaker in the event that a
process from the left subtree and a process from the right subtree attempt to enter their critical sections at
the same time. The algorithm ensures that the two processes enter their critical sections according to the
order in which they update T . Variable P [i] ranges over f0; 1; 2g and is used by process i whenever it needs
to busy-wait. Note that P [i] is waited on only by process i, and thus can be stored in a memory location
that is locally accessible to process i (in which case all spins are local).
Loosely speaking, the algorithm works as follows. Let process i be a process from the left subtree. When
process i wants to enter its critical section, it informs processes in the right subtree of its intention by
establishing C[0] = i. Then, process i assigns its identi�er i to the tie-breaker variable T , and initializes its
spin location P [i]. If no process in the right subtree has shown interest in entering its critical section, in
other words, if C[1] = �1 holds when i executes statement 7, then process i proceeds directly to its critical
section. Otherwise, i reads the tie-breaker variable T . If T = j 6= i, (i.e., if process j from the right subtree
is competing against process i,) then i can enter its critical section, as the algorithm prohibits process j
from entering its critical section when C[0] = i ^ T = j holds (recall that ties are broken in favor of the
�rst process to update T ). If T = i holds, then either process j executed statement 5 before process i, or
process j has executed statement 4 but not statement 5. In the �rst case, i should wait until j exits its
critical section, whereas, in the second case, i should be able to proceed to its critical section. This ambiguity
is resolved by having process i execute statements 10 through 14. Statements 10 and 11 are executed by
process i to release process j in the event that it is waiting for i to update the tie-breaker variable (i.e., j
is busy-waiting at statement 12). Statements 12 through 14 are executed by i to determine which process
updated the tie-breaker variable �rst. Note that P [i] � 1 implies that j has already updated the tie-breaker,
6

and P [i] = 2 implies that j has �nished its critical section. To handle these two cases, process i �rst waits
until P [i] � 1 (i.e., until j has updated the tie-breaker), re-examines T to see which process updated T last,
and �nally, if necessary, waits until P [i] = 2 (i.e., until process j �nishes its critical section).
After executing its critical section, process i informs process j that it is �nished by establishing C[i] = �1.
If T = j, in which case process j is waiting to enter its critical section, then process i updates P [j] in order
to terminate j's busy-waiting loop.
With regard to complexity, note that if variable P [i] is local to process i in the two process algorithm,
then process i executes a constant number of remote operations in its two-process entry and exit sections. It
follows that, in an N -process algorithm that employs a balanced binary tree, each process executes O(logN )
remote operations in its (N -process) entry and exit sections.
4 Fast Mutual Exclusion in the Absence of Contention
As discussed in Section 1, most early mutual exclusion algorithms based on read/write atomicity are
neither fast in the absence of contention, nor able to cope with high contention. Because Lamport's fast
mutual exclusion algorithm induces O(1) remote operations in the absence of contention, and our mutual
exclusion algorithm requires O(logN ) remote operations given any level of contention, it seems reasonable
to expect a solution to exist that induces O(1) remote operations when contention is absent, and O(logN )
remote operations when contention is high.
The fast-path algorithm given in Figure 3 almost achieves that goal. The basic idea, illustrated in Figure
4, is to combine Lamport's fast mutual exclusion algorithm and our algorithm, speci�cally by placing an
extra two-process version of our algorithm \on top" of the arbitration tree. The \left" entry section of this
extra two-process program is executed by a process if that process detects no contention. The \right" entry
section of this extra program is executed by the winning process from the arbitration tree. A process will
compete within the arbitration tree (as before) if it detects any contention. As seen in Figure 3, the scheme
used to detect contention is similar to that used in Lamport's algorithm. In this �gure, we use ENTRY k
and EXITk to denote the entry and exit sections of the k-process version of our algorithm. A correctness
proof for the algorithm of Figure 3 is given in the Appendix.
It should be clear that, in the absence of contention, a process enters its critical section after executing
O(1) remote operations. Also, in the presence of contention, a process enters its critical section after executing
O(logN ) remote operations. However, when a period of contention ends, N remote operations might be
required in order to re-open the fast entry section | see the while loop at line 22 in Figure 3. Nonetheless,
performance studies we have done show that, under high contention, these statements are rarely executed.
(Under low contention, they are obviously never executed.) For example, out of the 100,000 critical section
executions in one experiment, these N statements were performed after only 55 critical section executions
in the four-process case, and after only one in the eight- and sixteen-process cases.
In the absence of contention, our algorithm generates about twice as many remote memory operations
as Lamport's. However, under high contention, our algorithm is clearly superior, as Lamport's induces an
unbounded number of remote operations. Also, our fast-path algorithm ensures starvation-freedom, whereas
Lamport's algorithm does not.
5 Performance Results
To compare the scalability of our mutual exclusion algorithm with that of other algorithms, we conducted a
number of experiments on the BBN TC2000 and Sequent Symmetry multiprocessors. Results from some of
7

shared var B : array[0::N � 1] of boolean;
X;Y : �1::N � 1;
Z : boolean
initially Y = �1 ^ Z = false ^ (8i :: B[i] = false)
process i
private var flag : boolean;
n : 1::N
while true do
TOP: 0: Noncritical Section;
1: X := i;
2: if Y 6= �1 then goto SLOW �;
3: Y := i;
4: if X 6= i then goto SLOW �;
5: B[i] := true;
6: if Z then goto SLOW �;
7: if Y 6= i then goto SLOW �;
8: ENTRY2; =� Two-Process Entry Section �=
9: Critical Section;
10: EXIT2; =� Two-Process Exit Section �=
11: Y := �1;
12: B[i] := false;
13: goto TOP;
SLOW: 14: ENTRYN ; =� Arbitration Tree �=
15: ENTRY2; =� Two-Process Entry Section �=
16: Critical Section;
17: B[i] := false;
18: if X = i then
19: Z := true;
20: flag := true;
21: n := 0;
22: while (n < N ) do
23: if B[n] then flag := false �;
24: n := n+ 1
od;
25: if flag then Y := �1 �;
26: Z := false
�;
27: EXIT2; =� Two-Process Exit Section �=
28: EXITN =� Arbitration Tree �=
od
Figure 3: Fast, scalable mutual exclusion algorithm.
8

Fast (Lamport) Scalable (Our algorithm)
Figure 4: Providing a fast path.
these experiments are presented in this section.
BBN TC2000
The BBN TC2000 is a distributed shared memorymultiprocessor, each node of which contains a processor and
a memory unit. The nodes are connected via a multi-stage interconnection network, known as the Butter y
switch. Each access to a remote memory location (i.e., one that requires a traversal of the interconnection
network) takes about 2 microseconds, whereas each local reference takes about 0.6 microseconds. Each
node's processor, a Motorola 88100, provides an atomic fetch-and-store instruction called xmem. Other
strong primitives such as compare-and-swap and fetch-and-add are provided using the TC2000 hardware
locking protocol [4]. The TC2000 has cache memory, but does not provide a cache coherence mechanism.
We tested seven mutual exclusion algorithms on the TC2000: a simple test-and-set algorithm; the queue-
based algorithm using compare-and-swap given by Mellor-Crummey and Scott in [11]; the queue-based
algorithm using fetch-and-add given by T. Anderson in [3]; the fast mutual exclusion algorithm given by
Lamport in [9]; the tree-based algorithm given by Styer in [14]; the tree-based algorithm given by Peterson
and Fischer in [13]; and the mutual exclusion algorithm described in Section 3. Performance results obtained
by running these seven algorithms on the TC2000 are summarized in Figure 5. Each point (x; y) in each
graph represents the average time y for one critical section execution with x competing processors. The
timing results summarized in the graph were obtained by averaging over 105 critical section executions. The
critical section consists of a read and an increment of shared counter. Results obtained using larger critical
sections, which for brevity are not presented here, show similar performance to that depicted in Figure 5.
The timing results presented include the execution time of critical sections.
The performance of the test-and-set algorithm is given by the graph labeled T&S, Mellor-Crummey and
Scott's algorithm by the graph labeled MCS, T. Anderson's algorithm by the graph labeled AND, Lamport's
9

LAMP
T&S
PF
STYER
AND
YA
MCS
microsec.
processors
20.00
40.00
60.00
80.00
100.00
120.00
140.00
160.00
180.00
200.00
0.00 20.00 40.00 60.00
Figure 5: TC2000, small critical section.
10

algorithmby the graph labeled LAMP, Styer's algorithmby the graph labeled STYER, Peterson and Fischer's
algorithm by the graph labeled PF, and our algorithm by the graph labeled YA. On the TC2000, the MCS
algorithm was the best overall performer of the alternatives considered here. The graph depicted for the
MCS algorithm is mostly at, except at the point for two processors. This anomaly at two processors
coincides with results reported by Mellor-Crummey and Scott on the Sequent Symmetry, and was attributed
by them to the lack of a compare-and-swap instruction on the Symmetry [11]. As our implementation of
their algorithm did employ compare-and-swap, we have not found a satisfying explanation for this behavior
on the TC2000.
T. Anderson's algorithm requires only local spinning when implemented on a machine with coherent
caches. On the Symmetry, where each process can spin on its own coherent cache, Anderson's algorithm
outperforms the MCS algorithm. However, on the TC2000, which does not support coherent caching,
Anderson's algorithm requires remote spinning, slowing its performance.
The simple T&S algorithm exhibited poor scalability. The average execution time for the 64 processor
case, which is not depicted in Figure 5, is about 330 microseconds. Where there is a possibility of contention
among a large number of processors, it should be avoided, or used with good backo� scheme [1].
Three algorithms based on atomic reads and writes | Lamport's, Peterson and Fischer's, and Styer's |
also showed poor scalability. In particular, the performance of Lamport's algorithm degrades dramatically
as the number of contenders increases. The average execution time for the 64 processor case, which is not
depicted in Figure 5, is about 4000 microseconds. The performance of Styer's algorithm, which is better
than that of Lamport's, is due to the tree structure employed. Styer's algorithm generates O(logN ) remote
operations outside of busy-waiting loops. Even though Peterson and Fischer's algorithm is also tree-based,
it induces O(N ) remote operations outside of busy-waiting loops, which results in poorer scalability.
Our mutual exclusion algorithm shows performance that is comparable to that of T. Anderson's and
Mellor-Crummey and Scott's algorithms. Its good scalability emphasizes the importance of local spinning.
The di�erence seen between our mutual exclusion algorithm and the MCS algorithm is explained by the
amount of global tra�c generated by each algorithm. The MCS algorithm generates O(1) remote operations
per critical section execution, whereas ours generates O(logN ). The global tra�c of the other �ve algorithms
is unbounded, as each employs global spinning. The performance of T. Anderson's algorithm is far better than
that of the simple test-and-set algorithm. Because the processes in Anderson's algorithm spin globally on
the TC2000, this might be interpreted as a counterexample to our belief that minimizing remote operations
is important for good scalability. However, Mellor-Crummey and Scott reported in [11] that Anderson's
algorithm produced far fewer remote operations than the test-and-set algorithm.
Sequent Symmetry
Performance results of experiments on the Sequent Symmetry are summarized in Figure 5. The Sequent
Symmetry is a shared memory multiprocessor whose processor and memory nodes are interconnected via
a shared bus. A processor node consists of an Intel 80386 and a 64 Kbyte, two-way set-associative cache.
Cache coherence is maintained by a snoopy protocol. The Symmetry provides an atomic fetch-and-store
instruction. Because other strong primitives are not provided, we used a version of Mellor-Crummey and
Scott's algorithm that is implemented with fetch-and-store and that does not ensure starvation-freedom [11].
Fetch-and-add, which is used in T. Anderson's algorithm, was simulated by a test-and-set algorithm with
randomized backo�, as Anderson did in [3].
The experiments on the Symmetry show similar results to that for the TC2000. However, on the Sym-
metry, T. Anderson's algorithm has the best overall performance, mainly because the availability of coherent
11

LAMP
PF
STYER
T&S
AND
YA
MCS
microsec.
processors
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
90.00
100.00
5.00 10.00 15.00
Figure 6: Symmetry, small critical section.
12

caches makes all spins in his algorithm local. The performance of Lamport's algorithm on the Symmetry is
far better than that on the TC2000. This seems partly due to the fact that his algorithm is not starvation-
free. Speci�cally, when a process enters its critical section, it can keep all needed variables in its own cache
and repeatedly enter its critical section, without yielding to the other processes. In one of our tests for the
two-process case, one process executed 50,000 critical sections during a period of time in which the other
process executed only 120 critical sections.
Dependence on coherent caching for e�cient synchronization [3, 7] is questionable, as many caching
schemes do not cache shared writable data. Our solution neither requires a coherent cache for e�cient
implementation nor any strong primitives. An e�cient implementation of our algorithm requires only that
each processor has some part of shared memory that is locally accessible, and that read and write operations
are atomic. We consider these to be minimal hardware requirements for e�cient synchronization. It is
worth noting that, without fetch-and-add and compare-and-swap primitives, T. Anderson's algorithm and
Mellor-Crummey and Scott's algorithm are not starvation-free.
6 Concluding Remarks
We have presented a scalable mutual exclusion algorithm for shared memory multiprocessors that does
not require any hardware support other than atomic read and write operations. Our algorithm has better
worst-case time complexity than any previously published mutual exclusion algorithm based on read/write
atomicity, requiring O(logN ) remote operations under any amount of contention. We have also presented
an extension of our algorithm for fast mutual exclusion in the absence of contention that generates O(1)
remote operations in the presence of contention and O(N ) in the absence of contention. In addition, we have
suggested several open questions concerning the inherent complexity of multiprocessor synchronization.
In the complexity calculations given in this paper, the distinction between remote and local operations
is based upon a static assignment of shared variables to processes. Other de�nitions, which incorporate
speci�c architectural details of systems, are also possible. For example, for programs intended for machines
with coherent caching, it might be appropriate to consider a read of a shared variable x by a process p to
be local if x has not been written by another process since p's most recent access of x. However, because of
the many parameters that go into de�ning a cache-coherence protocol, such de�nitions can be problematic.
We therefore choose to leave this as a subject for further study.
A natural approach to measuring the time complexity of concurrent programs would be to simply count
the total number of operations executed. However, a straightforward application of such an approach does not
provide any insight into the behavior of mutual exclusion algorithms under heavy contention. In particular,
in any algorithm in which processes busy-wait, the number of operations needed for one process to get to
its critical section is unbounded. In order to serve as a measure of time complexity, a measure should be
both intuitive and easy to compute. In sequential programming, the usual measure of time complexity,
which is obtained by simply counting operations, satis�es these criteria. By contrast, there has been much
disagreement on how time complexity should be measured in concurrent programs, and a complexity measure
satisfying these criteria has yet to be adopted. We believe that an appropriate time complexity measure for
concurrent algorithms is one based on the number of remote memory references. As seen in this paper, such
a measure can be used to make meaningful distinctions concerning the performance of concurrent programs.
Because minimizing the number of remote memory references in shared-memory algorithms is analogous
to minimizing the number of messages in distributed message-passing algorithms, one might be tempted
to compare our algorithm with distributed mutual exclusion algorithms. However, in distributed message-
passing algorithms, processes respond to messages even when they are in their noncritical sections. By
13

contrast, in shared-memory algorithms (including ours), a process may halt while in its noncritical section,
without a�ecting other processes.
Acknowledgement: We would like to thank Howard Gobio� for helping with the performance studies given in
Section 5. We would also like to acknowledge Argonne National Laboratories and Lawrence Livermore National
Laboratories for providing us with access to the machines used in these studies. We are particularly grateful to Terry
Gaasterland at Argonne, and Tammy Welcome and Brent Gorda at Lawrence Livermore for their help. We also
thank the referees for their helpful remarks, and Leslie Lamport for sharing his hierarchical proof macros with us.
Appendix: Correctness Proof
In this appendix, we present the correctness proofs for the algorithms presented in Sections 3 and 4. As
depicted in Figure 1, our N -process solution is obtained by associating an instance of the two process solution
(statements 4 to 19) with each internal node of a binary arbitration tree. By induction on the depth of the
tree, it can be shown that the mutual exclusion and starvation-freedom properties hold for the N -process
program provided they hold for the two-process program. In the rest of this section, we focus on the proof
that the mutual exclusion and starvation-freedom properties hold for the two-process program.
Our assertions and proofs are stated in a hierarchical structure proposed by Lamport [10]. A sequence
of conjunctions (disjunctions) is denoted by putting each conjunct (disjunct), preceded by a ^ (_), in a
separate line. In proofs in Lamport's style, an assertion is proven by a series of high-level steps. Each of
these steps may be proven by a list of steps at a lower level. Every step is preceded by < level > number
for reference in subsequent steps. We begin by presenting de�nitions and notational conventions that will
be used in the remainder of the paper.
Notational Conventions: Unless speci�ed otherwise, we assume that i; p, and q range over f0::N � 1g .
We denote statement number k of process i as k:i. Let S be a subset of the statement labels in process i.
Then, i@fSg holds i� the program counter for process i equals some value in S. The expression (Ni :: P (i))
denotes the number of i's satisfying predicate P (i). The following is a list of symbols we will use ordered by
increasing binding power: �, 7!, ), _, ^, (=; 6=; >;<;�;�), (+;�), 0, :, (:;@) . The symbols enclosed in
parentheses have the same priority. We sometimes use parentheses to override this binding rule.
Mutual Exclusion
To facilitate the presentation, we de�ne the following predicate.
LME � (8i :: (Np : side(p) = side(i) :: p@f4::19g) � 1)
Informally, LME holds if the (N=2)-process solutions guarantee mutual exclusion in the subtrees. In other
words, the predicate LME serves as the induction hypothesis in our proof of mutual exclusion. We henceforth
assume that LME is an invariant.
We next prove that the mutual exclusion property holds. In particular, we prove that if at most one
process from the left subtree and at most one process from the right subtree compete, then at most one
process may enter its critical section at a time. This property can be stated as follows.
14

LME ) (Ni :: i@f15g) � 1
Next, we prove several assertions that are needed to establish ((Ni :: i@f15g) � 1).
(I1) C[1� side(i)] = p ^ p 6= �1
) side(p) = 1� side(i)
h1i1. Init ) C[1� side(i)] = �1
) I1
h1i2. I1 ) I10
Assume: I1 ^ :I10
Prove: ?
h2i1. side(p) 6= 1� side(i) by :I10
h2i2. 4:p ^ side(p) = 1� side(i) by I1 ^ :I10
h2i3. ? by h2i1 and h2i2
(I2) C[side(i)] = i
) i@f5::16g
h1i1. Init ) C[side(i)] = �1
) I2
h1i2. I2 ) I20
Assume: I2 ^ :I20
Prove: ?
h2i1. C0[side(i)] = i by :I20
h2i2. :(i@f5::16g)0 by :I20
h2i3. _ 4:i
_ 16:i
by I2 ^ :I20
Case: 4:i
h3i1. (i@f5g)0 by 4:i
h3i2. ? by h3i1 and h2i2
Case: 16:i
h3i1. C 0[side(i)] = �1 by 16:i
h3i2. ? by h3i1 and h2i1
(I3) i@f5::16g
) C[side(i)] = i
15

h1i1. Init ) i@f0g
) I3
h1i2. I3 ) I30
Assume: I3 ^ :I30
Prove: ?
h2i1. (i@f5::16g)0 by :I30
h2i2. C0[side(i)] 6= i by :I30
h2i3. _ 4:i
_ (4:p _ 16:p) ^ side(p) = side(i)
by I3 ^ :I30
Case: 4:i
h3i1. C 0[side(i)] = i by 4:i
h3i2. ? by h3i1 and h2i2
Case: (4:p _ 16:p) ^ side(p) = side(i)
Case: p = i
h4i1. C0[side(i)] = i _ (i@f17g)0 by 4:i _ 16:i
h4i2. ? by h4i1, h2i1, and h2i2
Case: p 6= i
h4i1. (p@f5; 17g)0 by 4:p _ 16:p
h4i2. :(i@f4::19g)0 by LME, h4i1, and side(p) = side(i)
h4i3. ? by h4i2 and h2i1
(I4) ^ p@f6::19g
^ side(q) = 1� side(p)
^ q@f6::19g
) _ T = p
_ T = q
h1i1. Init ) p@f0g
) I4
h1i2. I4 ) I40
Assume: I4 ^ :I40
Prove: ?
h2i1. (p@f6::19g)0 by :I40
h2i2. side(q) = 1� side(p) by :I40
h2i3. (q@f6::19g)0 by :I40
h2i4. T 06= p by :I40
h2i5. T 06= q by :I40
h2i6. 5:i by I4 ^ :I40
Case: i = p
h3i1. T 0 = p by 5:p
h3i2. ? by h3i1 and h2i4
16

Case: i 6= p ^ side(i) = side(p)
h3i1. (i@f6g)0 by 5:i
h3i2. ? by h3i1, h2i1, side(i) = side(p), and LME
Case: i = q
h3i1. T 0 = q by 5:q
h3i2. ? by h3i1 and h2i5
Case: i 6= q ^ side(i) = side(q)
h3i1. (i@f6g)0 by 5:i
h3i2. ? by h3i1, h2i3, side(i) = side(q), and LME
(I5) ^ p@f8::11g
^ C[1� side(p)] = q ^ q 6= �1
) _ p:rival = q
_ T = q
_ q@f5g
h1i1. Init ) p@f0g
) I5
h1i2. I5 ) I50
Assume: I5 ^ :I50
Prove: ?
h2i1. (p@f8::11g)0 by :I50
h2i2. C0[1� side(p)] = q ^ q 6= �1 by :I50
h2i3. p:rival0 6= q by :I50
h2i4. T 06= q by :I50
h2i5. :(q@f5g)0 by :I50
h2i6. side(q) = 1� side(p) by I1 and h2i2
h2i7. _ 4:q
_ 5:i
_ 7:p
_ 17:p
by I5 ^ :I50
Case: 4:q
h3i1. (q@f5g)0 by 4:q
h3i2. ? by h3i1 and h2i5
Case: 5:i
Case: i = p
h4i1. (p@f6g)0 by 5:p
h4i2. ? by h4i1 and h2i1
Case: i 6= p ^ side(i) = side(p)
h4i1. (i@f6g)0 by 5:i
h4i2. ? by h4i1, h2i1, side(i) = side(p), and LME
Case: i = q
17

h4i1. T 0 = q by 5:q
h4i2. ? by h4i1 and h2i4
Case: i 6= q ^ side(i) = side(q)
h4i1. (i@f6g)0 by 5:i
h4i2. C0[side(i)] = i by I3 and h4i1
h4i3. C0[1� side(p)] = i by h4i2, h2i6, and side(i) = side(q)
h4i4. ? by h4i3, h2i2, and i 6= q
Case: 7:p
h3i1. p:rival0 = q by 7:p and h2i2
h3i2. ? by h3i1 and h2i3
Case: 17:p
h3i1. (p@f18g)0 by 17:p
h3i2. ? by h3i1 and h2i1
(I6) ^ p@f7::15g
^ P [p] = 2
^ C[1� side(p)] = q ^ q 6= �1
) _ T = q
_ q@f5g
h1i1. Init ) p@f0g
) I6
h1i2. I6 ) I60
Assume: I6 ^ :I60
Prove: ?
h2i1. (p@f7::15g)0 by :I60
h2i2. P 0[p] = 2 by :I60
h2i3. C0[1� side(p)] = q ^ q 6= �1 by :I60
h2i4. T 06= q by :I60
h2i5. :(q@f5g)0 by :I60
h2i6. side(q) = 1� side(p) by I1 and h2i3
h2i7. (q@f5::16g)0 by I2, h2i3, and h2i6
h2i8. _ 4:q
_ 5:i
_ 6:p
_ 19:i
Case: 4:q
h3i1. (q@f5g)0 by 4:q
h3i2. ? by h3i1 and h2i5
Case: 5:i
Case: i = p
h4i1. (p@f6g)0 by 5:p
h4i2. ? by h4i1 and h2i1
Case: i 6= p ^ side(i) = side(p)
18

h4i1. (i@f6g)0 by 5:i
h4i2. ? by h4i1, h2i1, side(i) = side(p), and LME
Case: i = q
h4i1. T 0 = q by 5:q
h4i2. ? by h4i1 and h2i4
Case: i 6= q ^ side(i) = side(q)
h4i1. (i@f6g)0 by 5:i
h4i2. ? by h4i1, h2i7, side(i) = side(q), and LME
Case: 6:p
h3i1. P 0[p] = 0 by 6:p
h3i2. ? by h3i1 and h2i2
Case: 19:i
Case: i = p
h4i1. (p@f20g)0 by 19:p
h4i2. ? by h4i1 and h2i1
Case: i 6= p ^ side(i) = side(p)
h4i1. i@f19g ^ p@f7::15g by 19:i and h2i1
h4i2. ? by h4i1, side(i) = side(p), and LME
Case: i = q
h4i1. (q@f20g)0 by 19:q
h4i2. ? by h4i1 and h2i7
Case: i 6= q ^ side(i) = side(q)
h4i1. i@f19g ^ q@f5::16g by 19:i and h2i7
h4i2. ? by h4i1, side(i) = side(p), and LME
The next invariant, (I7), is the crux of our mutual exclusion proof. The mutual exclusion property is
then established in (I8).
(I7) ^ p@f15::19g
^ C[1� side(p)] = q ^ q 6= �1
) _ T = q
_ q@f5g
h1i1. Init ) p@f0g
) I7
h1i2. I7 ) I70
Assume: I7 ^ :I70
Prove: ?
h2i1. (p@f15::19g)0 by :I70
h2i2. C0[1� side(p)] = q ^ q 6= �1 by :I70
h2i3. T 06= q by :I70
19

h2i4. :(q@f5g)0 by :I70
h2i5. side(q) = 1� side(p) by I1 and h2i2
h2i6. (q@f5::16g)0 by I2, h2i2, and h2i5
h2i7. _ 4:q
_ 5:i
_ 8:p ^ p:rival = �1
_ (9:p _ 13:p) ^ T 6= p
_ 14:p ^ P [p] = 2
by I7 ^ :I70
Case: 4:q
h3i1. (q@f5g)0 by 4:q
h3i2. ? by h3i1 and h2i4
Case: 5:i
Case: i = p
h4i1. (p@f6g)0 by 5:p
h4i2. ? by h4i1 and h2i1
Case: i 6= p ^ side(i) = side(p)
h4i1. (i@f6g)0 by 5:i
h4i2. ? by h4i1, h2i1, side(i) = side(p), and LME
Case: i = q
h4i1. T 0 = q by 5:q
h4i2. ? by h4i1 and h2i3
Case: i 6= q ^ side(i) = side(q)
h4i1. (i@f6g)0 by 5:i
h4i2. ? by h4i1, h2i6, side(i) = side(q), and LME
Case: 8:p ^ p:rival = �1
h3i1. p@f8g ^ p:rival = �1 by 8:p
h3i2. C[1� side(p)] = q ^ q 6= �1 by 8:p and h2i2
h3i3. T 6= q by 8:p and h2i3
h3i4. :q@f5g by 8:p and h2i4
h3i5. _ :(C[1� side(p)] = q ^ q 6= �1)
_ T = q
_ q@f5g
by I5 and h3i1
h3i6. ? by h3i2, h3i3, h3i4, and h3i5
Case: (9:p _ 13:p) ^ T 6= p
h3i1. (p@f15g)0 ^ T 06= p by 9:p _ 13:p and T 6= p
h3i2. T 0 = q by I4, h3i1, h2i5, and h2i6
h3i3. ? by h3i2 and h2i3
Case: 14:p ^ P [p] = 2
h3i1. (p@f15g)0 ^ P 0[p] = 2 by 14:p
h3i2. T 0 = q _ (q@f5g)0 by I6, h3i1, and h2i2
h3i3. ? by h3i2, h2i3, and h2i4
(I8) (Ni :: i@f15g) � 1
20

Assume: :I8
Prove: ?
h1i1. ^ p@f15g ^ p 6= �1
^ q@f15g ^ q 6= �1
^ p 6= q
for some p; q, by :I8
h1i2. side(q) = 1� side(p) by h1i1 and LME
h1i3. C[side(p)] = p ^ C[side(q)] = q by I3 and h1i1
h1i4. C[1� side(q)] = p ^ C[1� side(p)] = q by h1i2 and h1i3
h1i5. T = p ^ T = q by I7, h1i1, and h1i4
h1i6. ? by h1i1 and h1i5
Progress
Next, we prove that our two-process algorithm is starvation-free. We �rst prove a number of invariants that
are needed to establish starvation-freedom.
(I9) C[side(i)] = p ^ p 6= �1
) side(p) = side(i)
h1i1. Init ) C[side(i)] = �1
) I9
h1i2. I9 ) I90
Assume: I9 ^ :I90
Prove: ?
h2i1. side(p) 6= side(i) by :I90
h2i2. 4:p ^ side(p) = side(i) by I9 ^ :I90
h2i3. ? by h2i1 and h2i2
(I10) i@f8::11g
) _ i:rival = �1
_ side(i:rival) = 1� side(i)
h1i1. Init ) i@f0g
) I10
h1i2. I10 ) I100
Assume: I10 ^ :I100
Prove: ?
21

h2i1. (i@f8::11g)0 by :I100
h2i2. i:rival0 6= �1 by :I100
h2i3. side(i:rival0) 6= 1� side(i) by :I100
h2i4. _ 7:i
_ 17:i
by I10 ^ :I100
Case: 7:i
h3i1. i:rival0 = C 0[1� side(i)] by 7:i
h3i2. side(i:rival0) = 1� side(i) by I1, h3i1, and h2i2
h3i3. ? by h3i2 and h2i3
Case: 17:i
h3i1. (i@f18g)0 by 17:i
h3i2. ? by h3i1 and h2i1
(I11) (8j : side(j) = side(i) :: j@f0::4; 17::22g)
) C[side(i)] = �1
h1i1. Init ) C[side(i)] = �1
) I11
h1i2. I11 ) I110
Assume: I11 ^ :I110
Prove: ?
h2i1. (8j : side(j) = side(i) :: (j@f0::4; 17::22g)0) by :I110
h2i2. Let: C 0[side(i)] = p ^ p 6= �1 by :I110
h2i3. side(p) = side(i) by I9 and h2i2
h2i4. (p@f5::16g)0 by I2 and h2i2
h2i5. ? by h2i4, h2i3, and h2i1
(I12) ^ p@f8g ^ p:rival 6= �1 _ p@f9::14g
^ side(q) = 1� side(p)
^ q@f18; 19g
) _ q:rival = p
_ q:rival = q
h1i1. Init ) p@f0g
) I12
h1i2. I12 ) I120
Assume: I12 ^ :I120
Prove: ?
22

h2i1. (p@f8g)0 ^ p:rival0 6= �1 _ (p@f9::14g)0 by :I120
h2i2. side(q) = 1� side(p) by :I120
h2i3. (q@f18; 19g)0 by :I120
h2i4. q:rival0 6= p by :I120
h2i5. q:rival0 6= q by :I120
h2i6. C0[side(q)] = �1 by I11, h2i3, and LME
h2i7. T 0 = p _ T 0 = q by I4, h2i1, h2i2, and h2i3
h2i8. _ 7:p
_ 7:q
_ 17:q
by I12 ^ :I120
Case: 7:p
h3i1. C 0[1� side(p)] = �1 by 7:p, h2i6, and h2i2
h3i2. (p@f8g)0 ^ p:rival0 = �1 by 7:p and h3i1
h3i3. ? by h3i2 and h2i1
Case: 7:q
h3i1. (q@f8g)0 by 7:q
h3i2. ? by h3i1 and h2i3
Case: 17:q
h3i1. q:rival0 = p _ q:rival0 = q by 17:q and h2i7
h3i2. ? by h3i1, h2i4, and h2i5
(I13) ^ p@f8g ^ p:rival 6= �1 _ p@f9::14g
^ side(q) = 1� side(p)
^ q@f19g
) q:rival = p
h1i1. Init ) p@f0g
) I13
h1i2. I13 ) I130
Assume: I13 ^ :I130
Prove: ?
h2i1. (p@f8g)0 ^ p:rival0 = �1 _ (p@f9::14g)0 by :I130
h2i2. side(q) = 1� side(p) by :I130
h2i3. (q@f19g)0 by :I130
h2i4. q:rival0 6= p by :I130
h2i5. C0[side(q)] = �1 by I11, h2i3, and LME
h2i6. _ 7:p
_ 7:q _ 17:q
_ 18:q ^ q:rival 6= q
by I13 ^ :I130
Case: 7:p
h3i1. C 0[1� side(p)] = �1 by 7:p, h2i5, and h2i2
h3i2. (p@f8g)0 ^ p:rival0 = �1 by 7:p and h3i1
23

h3i3. ? by h3i2 and h2i1
Case: 7:q _ 17:q
h3i1. :(q@f19g)0 by 7:q _ 17:q
h3i2. ? by h3i1 and h2i3
Case: 18:q ^ q:rival 6= q
h3i1. q:rival0 = p by I12, h2i1, h2i2, h2i3, and q:rival0 6= q
h3i2. ? by h3i1, and h2i4
(I14) ^ p@f8g ^ p:rival 6= �1 _ p@f9::14g
^ side(q) = 1� side(p)
^ q@f18g
^ q:rival = q
) T = q
h1i1. Init ) p@f0g
) I14
h1i2. I14 ) I140
Assume: I14 ^ :I140
Prove: ?
h2i1. (p@f8g)0 ^ p:rival0 6= �1 _ (p@f9::14g)0 by :I140
h2i2. side(q) = 1� side(p) by :I140
h2i3. (q@f18g)0 by :I140
h2i4. q:rival0 = q by :I140
h2i5. T 06= q by :I140
h2i6. C0[side(q)] = �1 by I11, h2i3, and LME
h2i7. _ 5:i
_ 7:p
_ 7:q
_ 17:q
by I14 ^ :I140
Case: 5:i
Case: i = p
h4i1. (p@f6g)0 by 5:p
h4i2. ? by h4i1 and h2i1
Case: i 6= p ^ side(i) = side(p)
h4i1. (i@f6g)0 by 5:i
h4i2. ? by h4i1, h2i1, side(i) = side(p), and LME
Case: i = q
h4i1. (q@f6g)0 by 5:q
h4i2. ? by h4i1 and h2i3
Case: i 6= q ^ side(i) = side(q)
h4i1. (i@f6g)0 by 5:i
h4i2. ? by h4i1, h2i3, side(i) = side(q), and LME
24

Case: 7:p
h3i1. C 0[1� side(p)] = �1 by 7:p, h2i6, and h2i2
h3i2. (p@f8g)0 ^ p:rival0 = �1 by 7:p and h3i1
h3i3. ? by h3i2 and h2i1
Case: 7:q
h3i1. (q@f8g)0 by 7:q
h3i2. ? by h3i1 and h2i3
Case: 17:q
h3i1. q:rival0 = T 0 by 17:q
h3i2. ? by h3i1, h2i4, and h2i5
(I15) ^ p@f8g ^ p:rival 6= �1 _ p@f9::14g
^ (8i : side(i) = 1� side(p) :: i@f0::4; 20::22g)
) P [p] = 2
h1i1. Init ) p@f0g
) I15
h1i2. I15 ) I150
Assume: I15 ^ :I150
Prove: ?
h2i1. (p@f8g)0 ^ p:rival0 6= �1 _ (p@f9::14g)0 by :I150
h2i2. (8i : side(i) = 1� side(p) :: (i@f0::4; 20::22g)0) by :I150
h2i3. P 0[p] 6= 2 by :I150
h2i4. C0[side(p)] = p by I3 and h2i1
h2i5. C0[1� side(p)] = �1 by I11 and h2i2
h2i6. _ 6:p
_ 7:p
_ 11:i ^ i:rival = p
_ 18:i ^ side(i) = 1� side(p) ^ i:rival = i
_ 19:i ^ side(i) = 1� side(p)
by I15 ^ :I150
Case: 6:p
h3i1. (p@f7g)0 by 6:p
h3i2. ? by h3i1 and h2i1
Case: 7:p
h3i1. (p@f8g)0 ^ p:rival0 = �1 by 7:p and h2i5
h3i2. ? by h3i1 and h2i1
Case: 11:i ^ i:rival = p
h3i1. (i@f12g)0 ^ i:rival0 = p by 11:i
h3i2. side(i) = 1� side(p) by I10 and h3i1
h3i3. ? by h3i1, h3i2, and h2i2
Case: 18:i ^ side(i) = 1� side(p) ^ i:rival = i
h3i1. i@f18g by 18:i
25

h3i2. p@f8g ^ p:rival = �1 _ p@f9::14g by 18:i and h2i1
h3i3. T = i by I14, h3i2, side(i) = 1� side(p), h3i1, and i:rival = i
h3i4. T 6= p by h3i3, and side(i) = 1� side(p)
h3i5. C[1� side(i)] = p by 18:i, h2i4, and side(i) = 1� side(p)
h3i6. p@f5g by I7,h3i1, h3i5, and h3i4
h3i7. ? by h3i6 and h3i2
Case: 19:i ^ side(i) = 1� side(p)
h3i1. i@f19g by 19:i
h3i2. p@f8g ^ p:rival = �1 _ p@f9::14g by 19:i and h2i1
h3i3. i:rival = p by I13, h3i2, side(i) = 1� side(p), and h3i1
h3i4. P 0[p] = 2 by h3i3 and 19:i
h3i5. ? by h3i4 and h2i3
(I16) ^ p@f10::12g
^ side(q) = 1� side(p)
^ q@f8::12g
^ T = q
) q:rival = p
h1i1. Init ) p@f0g
) I16
h1i2. I16 ) I160
Assume: I16 ^ :I160
Prove: ?
h2i1. (p@f10::12g)0 by :I160
h2i2. side(q) = 1� side(p) by :I160
h2i3. (q@f8::12g)0 by :I160
h2i4. T 0 = q by :I160
h2i5. q:rival0 6= p by :I160
h2i6. C0[side(p)] = p by I3 and h2i1
h2i7. _ 5:q
_ 7:q
_ 9:p ^ T = p
_ 17:q
by I16 ^ :I160
Case: 5:q
h3i1. (q@f6g)0 by 5:q
h3i2. ? by h3i1 and h2i3
Case: 7:q
h3i1. C[1� side(q)] = p by 7:q, h2i2, and h2i6
h3i2. q:rival0 = p by 7:q and h3i1
h3i3. ? by h3i2 and h2i5
Case: 9:p ^ T = p
26
h3i1. T 0 = p by 9:p and T = p
h3i2. ? by h3i1, h2i4, and h2i2
Case: 17:q
h3i1. (q@f18g)0 by 17:q
h3i2. ? by h3i1 and h2i3
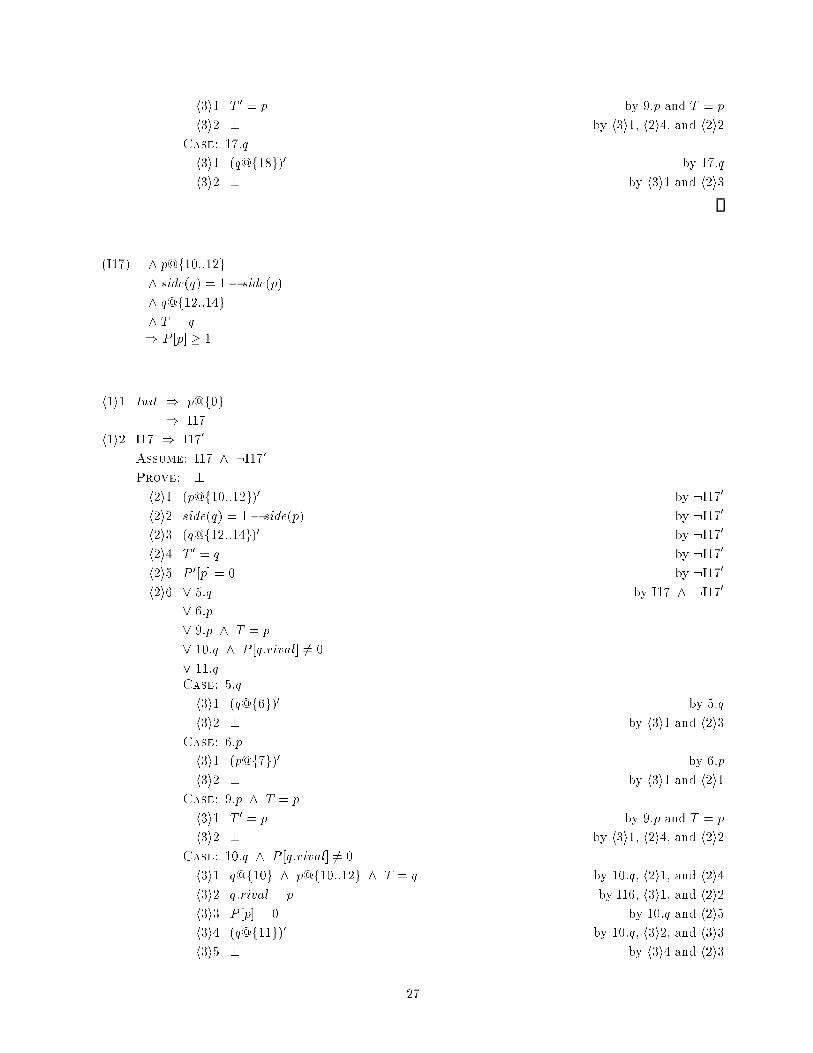
(I17) ^ p@f10::12g
^ side(q) = 1� side(p)
^ q@f12::14g
^ T = q
) P [p] � 1
h1i1. Init ) p@f0g
) I17
h1i2. I17 ) I170
Assume: I17 ^ :I170
Prove: ?
h2i1. (p@f10::12g)0 by :I170
h2i2. side(q) = 1� side(p) by :I170
h2i3. (q@f12::14g)0 by :I170
h2i4. T 0 = q by :I170
h2i5. P 0[p] = 0 by :I170
h2i6. _ 5:q
_ 6:p
_ 9:p ^ T = p
_ 10:q ^ P [q:rival] 6= 0
_ 11:q
by I17 ^ :I170
Case: 5:q
h3i1. (q@f6g)0 by 5:q
h3i2. ? by h3i1 and h2i3
Case: 6:p
h3i1. (p@f7g)0 by 6:p
h3i2. ? by h3i1 and h2i1
Case: 9:p ^ T = p
h3i1. T 0 = p by 9:p and T = p
h3i2. ? by h3i1, h2i4, and h2i2
Case: 10:q ^ P [q:rival] 6= 0
h3i1. q@f10g ^ p@f10::12g ^ T = q by 10:q, h2i1, and h2i4
h3i2. q:rival = p by I16, h3i1, and h2i2
h3i3. P [p] = 0 by 10:q and h2i5
h3i4. (q@f11g)0 by 10:q, h3i2, and h3i3
h3i5. ? by h3i4 and h2i3
27

Case: 11:q
h3i1. q@f11g ^ p@f10::12g ^ T = q by 11:q, h2i1, and h2i4
h3i2. q:rival = p by I16, h3i1, and h2i2
h3i3. P 0[p] = 1 by 11:q and h3i2
h3i4. ? by h3i3 and h2i5
(I18) ^ p@f12g
^ side(q) = 1� side(p)
^ q@f12g
) _ P [p] � 1
_ P [q] � 1
Assume: ^ p@f12g
^ side(q) = 1� side(p)
^ q@f12g
Prove: _ P [p] � 1
_ P [q] � 1
h1i1. _ T = p
_ T = q
by I4 and the assumptions
h1i2. _ P [p] � 1
_ P [q] � 1
by I17, h1i1, and the assumptions
(I19) i@f13; 14g
) P [i] � 1
h1i1. Init ) i@f0g
) I19
h1i2. I19 ) I190
Assume: I19 ^ :I190
Prove: ?
h2i1. (i@f13; 14g)0 by :I190
h2i2. P 0[i] = 0 by :I190
h2i3. _ 6:i
_ 12:i ^ P [i] � 1
by I19 ^ :I190
Case: 6:i
h3i1. (i@f7g)0 by 6:i
h3i2. ? by h3i1 and h2i1
Case: 12:i ^ P [i] � 1
28
h3i1. P 0[i] � 1 by 12:i and P [i] � 1
h3i2. ? by h3i1 and h2i2
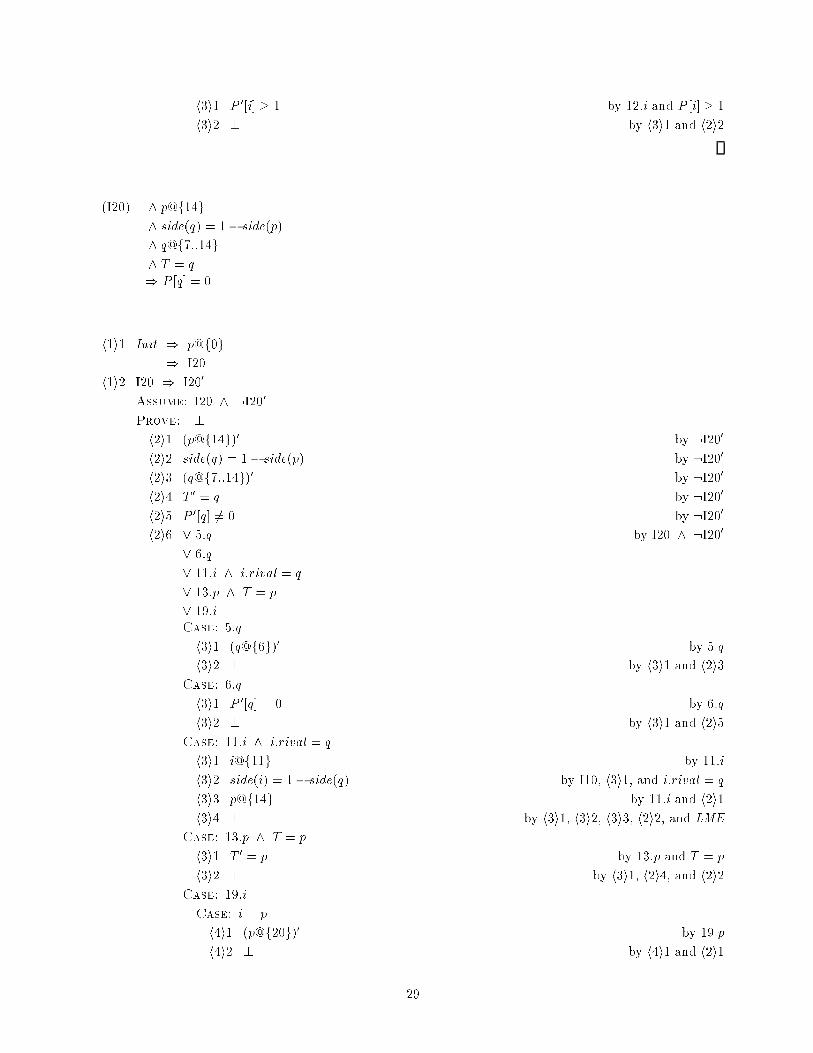
(I20) ^ p@f14g
^ side(q) = 1� side(p)
^ q@f7::14g
^ T = q
) P [q] = 0
h1i1. Init ) p@f0g
) I20
h1i2. I20 ) I200
Assume: I20 ^ :I200
Prove: ?
h2i1. (p@f14g)0 by :I200
h2i2. side(q) = 1� side(p) by :I200
h2i3. (q@f7::14g)0 by :I200
h2i4. T 0 = q by :I200
h2i5. P 0[q] 6= 0 by :I200
h2i6. _ 5:q
_ 6:q
_ 11:i ^ i:rival = q
_ 13:p ^ T = p
_ 19:i
by I20 ^ :I200
Case: 5:q
h3i1. (q@f6g)0 by 5:q
h3i2. ? by h3i1 and h2i3
Case: 6:q
h3i1. P 0[q] = 0 by 6:q
h3i2. ? by h3i1 and h2i5
Case: 11:i ^ i:rival = q
h3i1. i@f11g by 11:i
h3i2. side(i) = 1� side(q) by I10, h3i1, and i:rival = q
h3i3. p@f14g by 11:i and h2i1
h3i4. ? by h3i1, h3i2, h3i3, h2i2, and LME
Case: 13:p ^ T = p
h3i1. T 0 = p by 13:p and T = p
h3i2. ? by h3i1, h2i4, and h2i2
Case: 19:i
Case: i = p
h4i1. (p@f20g)0 by 19:p
h4i2. ? by h4i1 and h2i1
29
Case: i 6= p ^ side(i) = side(p)
h4i1. i@f19g ^ p@f14g by 19:i and h2i1
h4i2. ? by h4i1, side(i) = side(p), and LME
Case: i = q
h4i1. (q@f20g)0 by 19:q
h4i2. ? by h4i1 and h2i3
Case: i 6= q ^ side(i) = side(q)
h4i1. i@f19g ^ q@f7::14g by 19:i and h2i3
h4i2. ? by h4i1, side(i) = side(q), and LME
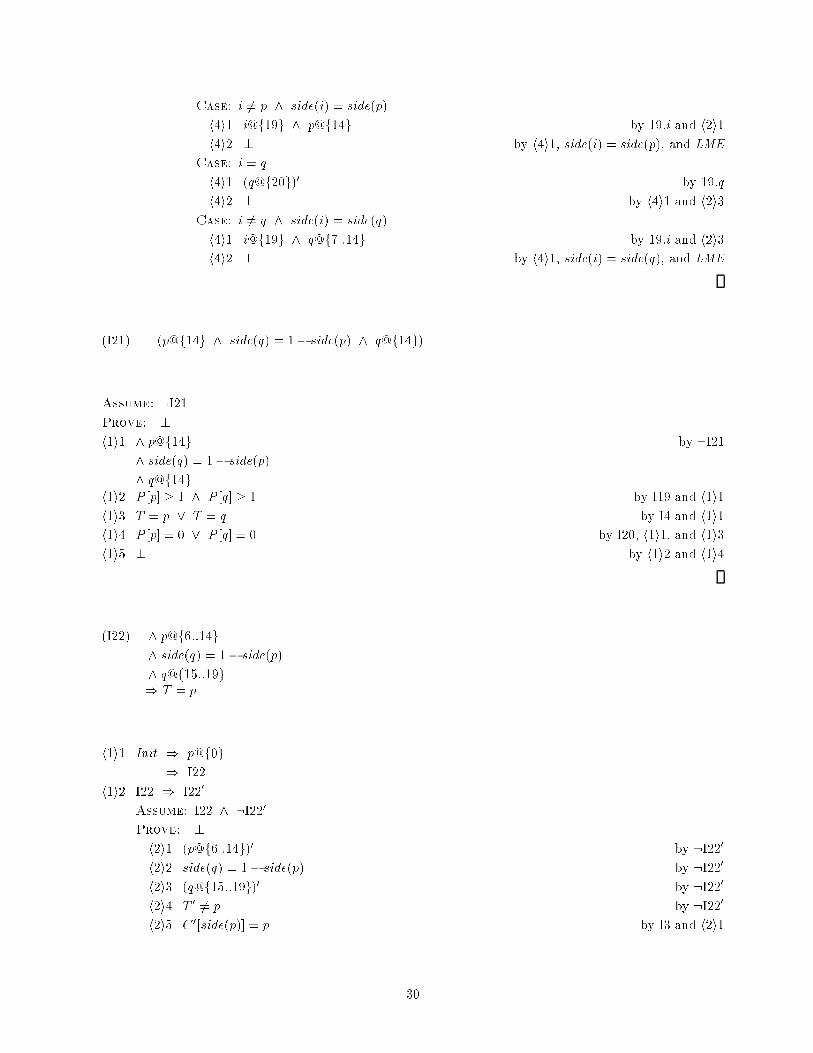
(I21) :(p@f14g ^ side(q) = 1� side(p) ^ q@f14g)
Assume: :I21
Prove: ?
h1i1. ^ p@f14g
^ side(q) = 1� side(p)
^ q@f14g
by :I21
h1i2. P [p] � 1 ^ P [q] � 1 by I19 and h1i1
h1i3. T = p _ T = q by I4 and h1i1
h1i4. P [p] = 0 _ P [q] = 0 by I20, h1i1, and h1i3
h1i5. ? by h1i2 and h1i4
(I22) ^ p@f6::14g
^ side(q) = 1� side(p)
^ q@f15::19g
) T = p
h1i1. Init ) p@f0g
) I22
h1i2. I22 ) I220
Assume: I22 ^ :I220
Prove: ?
h2i1. (p@f6::14g)0 by :I220
h2i2. side(q) = 1� side(p) by :I220
h2i3. (q@f15::19g)0 by :I220
h2i4. T 06= p by :I220
h2i5. C0[side(p)] = p by I3 and h2i1
30

h2i6. _ 5:i
_ 8:q ^ q:rival = �1
_ (9:q _ 13:q) ^ T 6= q
_ 14:q ^ P [q] = 2
by I22 ^ :I220
Case: 5:i
Case: i = p
h4i1. T 0 = p by 5:p
h4i2. ? by h4i1 and h2i4
Case: i 6= p ^ side(i) = side(p)
h4i1. (i@f6g)0 by 5:i
h4i2. ? by h4i1, h2i1, side(i) = side(p), and LME
Case: i = q
h4i1. (q@f6g)0 by 5:q
h4i2. ? by h4i1 and h2i3
Case: i 6= q ^ side(i) = side(q)
h4i1. (i@f6g)0 by 5:i
h4i2. ? by h4i1, h2i3, side(i) = side(q), and LME
Case: 8:q ^ q:rival = �1
h3i1. q@f8g by 8:q
h3i2. C[1� side(q)] = p ^ p 6= �1 by 8:q, h2i2, and h2i5
h3i3. p@f6::14g by 8:q and h2i1
h3i4. T = p I5, h3i1, h3i2, h3i3, and q:rival = �1
h3i5. T 0 = p 8:q and h3i4
h3i6. ? by h3i5 and h2i4
Case: (9:q _ 13:q) ^ T 6= q
h3i1. (q@f15g)0 ^ T 06= q by 9:q _ 13:q and T 6= q
h3i2. T 0 = p by I4, h2i1, h2i2, and h3i1
h3i3. ? by h3i2 and h2i4
Case: 14:q ^ P [q] = 2
h3i1. (q@f15g)0 ^ P 0[q] = 2 by 14:q and P [q] = 2
h3i2. C[1� side(q)] = p ^ p 6= �1 by 14:q, h2i2, and h2i5
h3i3. T 0 = p by I6, h3i1, h3i2, and h2i1
h3i4. ? by h3i3 and h2i4
(I23) ^ p@f7::14g
^ side(q) = 1� side(p)
^ q@f18; 19g
) _ q:rival = p
_ P [p] = 0
_ P [p] = 2
h1i1. Init ) p@f0g
31

) I23
h1i2. I23 ) I230
Assume: I23 ^ :I230
Prove: ?
h2i1. (p@f7::14g)0 by :I230
h2i2. side(q) = 1� side(p) by :I230
h2i3. (q@f18; 19g)0 by :I230
h2i4. q:rival0 6= p by :I230
h2i5. P 0[p] 6= 0 by :I230
h2i6. P 0[p] 6= 2 by :I230
h2i7. _ 6:p
_ 7:q
_ 11:i ^ i:rival = p
_ 17:q
by I23 ^ :I230
Case: 6:p
h3i1. P 0[p] = 0 by 6:p
h3i2. ? by h3i1 and h2i5
Case: 7:q
h3i1. (q@f8g)0 by 7:q
h3i2. ? by h3i1 and h2i3
Case: 11:i ^ i:rival = p
h3i1. i@f11g by 11:i
h3i2. side(i) = 1� side(p) by I10, h3i1, and i:rival = p
h3i3. side(i) = side(q) by h3i2, and h2i2
Case: i = q
h4i1. (q@f12g)0 by 11:q
h4i2. ? by h4i1 and h2i3
Case: i 6= q
h4i1. (i@f12g)0 by 11:i
h4i2. ? by h4i1, h2i3, h3i3, and LME
Case: 17:q
h3i1. p@f7::14g ^ q@f17g by 17:q and h2i1
h3i2. T = p by I22, h3i1, and h2i2
h3i3. q:rival0 = p by 17:q and h3i2
h3i4. ? by h3i3 and h2i4
(I24) ^ p@f7::14g
^ (8i : side(i) = 1� side(p) :: i@f0::5; 20::22g)
) _ P [p] = 0
_ P [p] = 2
h1i1. Init ) p@f0g
32

) I24
h1i2. I24 ) I240
Assume: I24 ^ :I240
Prove: ?
h2i1. (p@f7::14g)0 by :I240
h2i2. (8i : side(i) = 1� side(p) :: (i@f0::5; 20::22g)0) by :I240
h2i3. P 0[p] 6= 0 by :I240
h2i4. P 0[p] 6= 2 by :I240
h2i5. _ 6:p
_ 11:i ^ i:rival = p
_ 18:i ^ side(i) = 1� side(p) ^ i:rival = i
_ 19:i ^ side(i) = 1� side(p)
by I24 ^ :I240
Case: 6:p
h3i1. P 0[p] = 0 by 6:p
h3i2. ? by h3i1 and h2i3
Case: 11:i ^ i:rival = p
h3i1. i@f11g by 11:i
h3i2. side(i) = 1� side(p) by I10, h3i1, and i:rival = p
h3i3. (i@f12g)0 by 11:i
h3i4. ? by h3i2, h3i3, and h2i2
Case: 18:i ^ side(i) = 1� side(p) ^ i:rival = i
h3i1. i@f18g by 18:i
h3i2. p@f7::14g by 18:i and h2i1
h3i3. P [p] = 0 _ P [p] = 2 by I23, h3i1, h3i2, side(i) = 1� side(p), and i:rival = i
h3i4. P 0[p] = 0 _ P 0[p] = 2 by 18:i and h3i3
h3i5. ? by h3i4, h2i3, and h2i4
Case: 19:i ^ side(i) = 1� side(p)
h3i1. i@f19g by 19:i
h3i2. p@f7::14g by 19:i and h2i1
h3i3. i:rival = p _ P [p] = 0 _ P [p] = 2 by I23, h3i1, h3i2, and side(i) = 1� side(p)
h3i4. P 0[p] = 0 _ P 0[p] = 2 by 19:i and h3i3
h3i5. ? by h3i4, h2i3, and h2i4
(I25) ^ p@f8g ^ p:rival 6= �1 _ p@f9::14g
^ side(q) = 1� side(p)
^ q@f18; 19g
) q:rival = p
h1i1. Init ) p@f0g
) I25
h1i2. I25 ) I250
Assume: I25 ^ :I250
33

Prove: ?
h2i1. (p@f8g)0 ^ p:rival0 6= �1 _ (p@f9::14g)0 by :I250
h2i2. side(q) = 1� side(p) by :I250
h2i3. (q@f18; 19g)0 by :I250
h2i4. q:rival0 6= p by :I250
h2i5. C0[side(q)] = �1 by I11, h2i3, and LME
h2i6. _ 7:p
_ 7:q
_ 17:q
by I25 ^ :I250
Case: 7:p
h3i1. C 0[1� side(p)] = �1 by 7:p, h2i2, h2i5
h3i2. (p@f8g)0 ^ p:rival0 = �1 by 7:p and h3i1
h3i3. ? by h3i2 and h2i1
Case: 7:q
h3i1. (q@f8g)0 by 7:q
h3i2. ? by h3i1 and h2i3
Case: 17:q
h3i1. q@f17g ^ p@f8::14g by 17:q and h2i1
h3i2. T = p by I22, h3i1, and h2i2
h3i3. q:rival0 = p by 17:q and h3i2
h3i4. ? by h3i3 and h2i4
(I26) ^ p@f13; 14g
^ (8i : side(i) = 1� side(p) :: i@f0::5; 20::22g)
) P [p] = 2
h1i1. Init ) p@f0g
) I26
h1i2. I26 ) I260
Assume: I26 ^ :I260
Prove: ?
h2i1. (p@f13; 14g)0 by :I260
h2i2. (8i : side(i) = 1� side(p) :: (i@f0::5; 20::22g)0) by :I260
h2i3. P 0[p] 6= 2 by :I260
h2i4. _ 6:p
_ 11:i ^ i:rival = p
_ 12:p ^ P [p] 6= 0
_ 18:i ^ side(i) = 1� side(p)
_ 19:i ^ side(i) = 1� side(p)
by I26 ^ :I260
Case: 6:p
h3i1. (p@f7g)0 by 6:p
h3i2. ? by h3i1 and h2i1
34

Case: 11:i ^ i:rival = p
h3i1. i@f11g by 11:i
h3i2. side(i) = 1� side(p) by I10, h3i1, and i:rival = p
h3i3. (i@f12g)0 by 11:i
h3i4. ? by h3i2, h3i3, and h2i2
Case: 12:p ^ P [p] 6= 0
h3i1. (p@f13g)0 ^ P 0[p] 6= 0 by 12:p
h3i2. P 0[p] = 2 by I24, h3i1, and h2i2
h3i3. ? by h3i2 and h2i3
Case: 18:i ^ side(i) = 1� side(p)
h3i1. i@f18g by 18:i
h3i2. p@f13; 14g by 18:i and h2i1
h3i3. i:rival = p by I25, h3i1, h3i2, and side(i) = 1� side(p)
h3i4. (i@f19g)0 by 18:i and h3i3
h3i5. ? by h3i4, h2i2, and side(i) = 1� side(p)
Case: 19:i ^ side(i) = 1� side(p)
h3i1. i@f19g by 19:i
h3i2. p@f13; 14g by 19:i and h2i1
h3i3. i:rival = p by I25, h3i1, h3i2, and side(i) = 1� side(p)
h3i4. P 0[p] = 2 by 19:i and h3i3
h3i5. ? by h3i4 and h2i3
(I27) ^ p@f7::14g
^ side(q) = 1� side(p)
^ q@f11g
^ q:rival = p
) P [p] = 0
h1i1. Init ) p@f0g
) I27
h1i2. I27 ) I270
Assume: I27 ^ :I270
Prove: ?
h2i1. (p@f7::14g)0 by :I270
h2i2. side(q) = 1� side(p) by :I270
h2i3. (q@f11g)0 by :I270
h2i4. q:rival0 = p by :I270
h2i5. P 0[p] 6= 0 by :I270
35

h2i6. _ 6:p
_ 7:q _ 17:q
_ 10:q ^ P [q:rival] = 0
_ 11:i ^ i:rival = p
_ 19:i
by I27 ^ :I270
Case: 6:p
h3i1. P 0[p] = 0 by 6:p
h3i2. ? by h3i1 and h2i5
Case: 7:q ^ 17:q
h3i1. (q@f8; 18g)0 by 7:q _ 17:q
h3i2. ? by h3i1 and h2i3
Case: 10:q ^ P [q:rival] = 0
h3i1. q:rival = p by 10:q and h2i4
h3i2. P [p] = 0 by h3i1 and P [q:rival] = 0
h3i3. P 0[p] = 0 by 10:q and h3i2
h3i4. ? by h3i3 and h2i5
Case: 11:i ^ i:rival = p
h3i1. i@f11g by 11:i
h3i2. side(i) = 1� side(p) by I10, h3i1, and i:rival = p
h3i3. side(i) = side(q) by h3i2, and h2i2
Case: i = q
h4i1. (q@f12g)0 by 11:q
h4i2. ? by h4i1 and h2i3
Case: i 6= q
h4i1. (i@f12g)0 by 11:i
h4i2. ? by h4i1, h2i3, side(i) = side(q), and LME
Case: 19:i
h3i1. p@f7::14g by 19:i and h2i1
h3i2. q@f11g by 19:i and h2i3
h3i3. i@f19g by 19:i
Case: i = p
h4i1. ? by h3i1 and h3i3
Case: i 6= p ^ side(i) = side(p)
h4i1. ? by h3i1, h3i3, side(i) = side(p), and LME
Case: i = q
h4i1. ? by h3i2 and h3i3
Case: i 6= q ^ side(i) = side(q)
h4i1. ? by h3i2, h3i3, side(i) = side(q), and LME
(I28) ^ p@f14g
^ side(q) = 1� side(p)
^ T = q
) P [p] = 2
36

h1i1. Init ) p@f0g
) I28
h1i2. I28 ) I280
Assume: I28 ^ :I280
Prove: ?
h2i1. (p@f14g)0 by :I280
h2i2. side(q) = 1� side(p) by :I280
h2i3. T 0 = q by :I280
h2i4. P 0[p] 6= 2 by :I280
h2i5. _ 5:q
_ 6:p
_ 11:i ^ i:rival = p ^ P [p] = 2
_ 13:p ^ T = p
by I28 ^ :I280
Case: 5:q
h3i1. q@f5g by 5:q
h3i2. (8i : side(i) = side(q) :: i@f0::5; 20::22g) by h3i1 and LME
h3i3. p@f14g by 5:q and h2i1
h3i4. P [p] = 2 by I26, h3i3, h3i2, and h2i2
h3i5. P 0[p] = 2 by 5:q and h3i4
h3i6. ? by h3i5 and h2i4
Case: 6:p
h3i1. (p@f7g)0 by 6:p
h3i2. ? by h3i1 and h2i1
Case: 11:i ^ i:rival = p ^ P [p] = 2
h3i1. i@f11g by 11:i
h3i2. side(i) = 1� side(p) by I10, h3i1, and i:rival = p
h3i3. p@f14g by 11:i and h2i1
h3i4. P [p] = 0 by I27, h3i3, h3i2, h3i1, and i:rival = p
h3i5. ? by h3i4 and P [p] = 2
Case: 13:p ^ T = p
h3i1. T 0 = p by 13:p and T = p
h3i2. ? by h3i1, h2i3, and h2i2
(I29) ^ i@f12g
^ side(q) = 1� side(i)
^ q@f14g
) _ P [i] � 1
_ P [q] = 2
Assume: :I29
Prove: ?
h1i1. i@f12g by :I29
37

h1i2. side(q) = 1� side(i) by :I29
h1i3. q@f14g by :I29
h1i4. P [i] = 0 by :I29
h1i5. P [q] � 1 by :I29
h1i6. T = i _ T = q by I4, h1i1, h1i3, and h1i2
h1i7. T = i by I17, h1i1, h1i3, h1i2, h1i4, and h1i6
h1i8. P [q] = 2 by I28, h1i3, h1i2, and h1i7
h1i9. ? by h1i8 and h1i5
(I15) implies that if only one process is in its entry section, then that process's busy-waiting loops will
terminate. (I18), (I21), and (I29) imply that if two processes are in their entry sections then at least one
of them can make progress. Note that at most two process may execute their entry sections at this level.
Hence, we conclude that the two-process solution in Figure 1 is free from livelock.
Next, we prove that the algorithm is free from starvation. To facilitate the presentation, we de�ne the
following predicate, which represents the starvation-freedom property.
(8i :: i@f1::14g 7! i@f15g) (SF)
The following two assertions imply that (SF) holds.
(8i :: i@f1::3g 7! i@f4g) (LSF)
(8i :: i@f4::14g 7! i@f15g) (2SF)
As we explained above, ENTRY LEFT(ENTRY RIGHT) and EXIT LEFT(EXIT RIGHT) are obtained by
nesting the two process mutual exclusion algorithm in lines from 4 to 19. It is straightforward to show, by
induction on the depth of the tree, that (LSF) follows from (2SF). In the rest of this section, we prove that
(2SF) holds. First, we prove two unless assertions.
i@f12g ^ P [i] � 1 unless i@f13g (U1)
h1i1. i@f12g ^ P [i] � 1 ) (i@f12g)0 ^ P 0[i] � 1 _ (i@f13g)0
Assume: i@f12g ^ P [i] � 1 ^ (:(i@f12g)0 _ P 0[i] = 0) ^ :(i@f13g)0
Prove: ?
h2i1. i@f12g by the assumption
h2i2. P [i] � 1 by the assumption
h2i3. :(i@f13g)0 by the assumption
h2i4. _ 6:i
_ 12:i
by :U1
Case: 6:i
h3i1. i@f6g by 6:i
h3i2. ? by h3i1 and h2i1
38

Case: 12:i
h3i1. (i@f13g)0 by 12:i and h2i2
h3i2. ? by h3i1 and h2i3
i@f14g ^ P [i] = 2 unless i@f15g (U2)
h1i1. i@f14g ^ P [i] = 2 ) (i@f14g)0 ^ P 0[i] = 2 _ (i@f15g)0
Assume: i@f14g ^ P [i] = 2 ^ (:(i@f14g)0 _ P 0[i] � 1) ^ :(i@f15g)0
Prove: ?
h2i1. i@f14g by the assumption
h2i2. P [i] = 2 by the assumption
h2i3. :(i@f15g)0 by the assumption
h2i4. _ 6:i
_ 11:q ^ q:rival = i
_ 14:i
by :U2
Case: 6:i
h3i1. i@f6g by 6:i
h3i2. ? by h3i1 and h2i1
Case: 11:q ^ q:rival = i
h3i1. q@f11g by 11:q
h3i2. side(q) = 1� side(i) by I1, h3i1, and q:rival = i
h3i3. P [i] = 0 by I27, h2i1, h3i2, h3i1, and q:rival = i
h3i4. ? by h3i3 and h2i2
Case: 14:i
h3i1. (i@f15g)0 by 14:i and h2i2
h3i2. ? by h3i1 and h2i3
The next two assertions follow from these unless assertions, the de�nition of a fair history, and the program
text; (U1) is used to prove (L1) and (U2) is used to prove (L2).
i@f12g ^ P [i] � 1 7! i@f13g (L1)
i@f14g ^ P [i] = 2 7! i@f15g (L2)
The following assertions, which are stated without proof, follow directly from the de�nition of a fair history
and the program text.
i@f12g ^ side(q) = 1� side(i) ^ q@f5::11g 7!
i@f13g _
i@f12g ^ side(q) = 1� side(i) ^ q@f12; 15g) (L3)
39

i@f12g ^ side(q) = 1� side(i) ^ q@f15::18g 7!
i@f13g _
i@f12g ^ side(q) = 1� side(i) ^ q@f18g (L4)
Assertions (L5) through (L10), given next, easily follow from the preceding assertions. In particular, (I25)
and (L4) imply that (L5) holds; (I25) and (L5) imply that (L6) holds; (L6) implies that (L7) holds; (L1)
and (L7) imply that (L8) holds; (I18) implies that (L9) holds; and (L1) implies that (L10) holds.
i@f12g ^ side(q) = 1� side(i) ^ q@f15::18g 7!
i@f13g _
i@f12g ^ side(q) = 1� side(i) ^ q@f18g ^ q:rival = i (L5)
i@f12g ^ side(q) = 1� side(i) ^ q@f15::19g 7!
i@f13g _
i@f12g ^ side(q) = 1� side(i) ^ q@f19g ^ q:rival = i (L6)
i@f12g ^ side(q) = 1� side(i) ^ q@f15::19g 7!
i@f13g _
i@f12g ^ P [i] = 2 (L7)
i@f12g ^ side(q) = 1� side(i) ^ q@f15::19g 7!
i@f13g (L8)
i@f12g ^ side(q) = 1� side(i) ^ q@f12g 7!
i@f12g ^ side(q) = 1� side(i) ^ q@f12g ^ (P [i] � 1 _ P [q] � 1) (L9)
i@f12g ^ side(q) = 1� side(i) ^ q@f12g ^ (P [i] � 1 _ P [q] � 1) 7!
i@f13g _
i@f12g ^ side(q) = 1� side(i) ^ q@f13g (L10)
The next assertion, which is stated without proof, follows directly from the de�nition of a fair history and
the program text.
i@f12g ^ side(q) = 1� side(i) ^ q@f13g 7!
i@f13g _
i@f12g ^ side(q) = 1� side(i) ^ q@f14; 15g (L11)
i@f12g ^ side(q) = 1� side(i) ^ q@f14g 7!
i@f13g _
i@f12g ^ side(q) = 1� side(i) ^ q@f15g (L12)
By (L1) and (L2), (I29) implies that (L12) holds.
i@f12g ^ side(q) = 1� side(i) ^ q@f5::15g 7!
i@f13g (L13)
40

Assertions (L3), (L8), (L11), and (L12) imply that (L13) holds.
i@f12g 7! i@f13g (L14)
(I15) implies that i@f12g ) P [i] = 2 _ (9q :: side(q) = 1 � side(i) ^ q@f5::19g) holds. By (L1), (L8),
and (L13), this implies that (L14) holds.
By proving assertions similar to (L3) through (L13), it is possible to establish (L15), given next, which is
similar to (L14). For brevity, we omit the proof of (L15).
i@f14g 7! i@f15g (L15)
Note that (L14) implies that the �rst busy-waiting loop of process i terminates, while (L15) implies that
the second busy-waiting loop of i terminates. Thus, we conclude that the algorithm in Figure 1 is free from
starvation.
Correctness Proof for Fast Algorithm
In this section, we prove that the mutual exclusion and starvation-freedom properties hold for mutual ex-
clusion algorithm of Figure 3. We �rst prove �ve invariants that are needed to prove that mutual exclusion
holds. The �rst three are quite simple: (I30) follows from the mutual exclusion property of the algorithm in
Figure 1, (I31) follows directly from the program text, and (I32) follows from (I30).
(I30) (Ni :: i@f15::27g) � 1
(I31) i@f6::12g ) B[i]
(I32) i@f20::26g ) Z
(I33) ^ i:flag
^ _ (i@f22; 23g ^ i:n > p)
_ (i@f24g ^ i:n � p)
) :p@f7::12g
h1i1. Init ) p@f0g
) I33
h1i2. I33 ) I330
Assume: I33 ^ :I330
Prove: ?
h2i1. i:flag0 by :I330
h2i2. _ ((i@f22; 23g)0 ^ i:n0 > p)
_ ((i@f24g)0 ^ i:n0� p)
by :I330
h2i3. (p@f7::12g)0 by :I330
41

h2i4. _ 6:p ^ :Z
_ 20:i
_ 21:i
_ 23:i ^ i:n = p ^ :B[i:n]
by I33 ^ :I330
Case: 6:p ^ :Z
h3i1. :i@f20::26g by I32 and :Z
h3i2. :(i@f20::26g)0 by 6:p and h3i1
h3i3. ? by h3i2 and h2i2
Case: 20:i
h3i1. (i@f21g)0 by 20:i
h3i2. ? by h3i1 and h2i2
Case: 21:i
h3i1. (i@f22g)0 ^ i:n0 = 0 by 21:i
h3i2. ? by h3i1, h2i2, and p � 0
Case: 23:i ^ i:n = p ^ :B[i:n]
h3i1. :B[p] by i:n = p ^ :B[i:n]
h3i2. :p@f6::12g0
by I31 and h3i1
h3i3. :(p@f6::12g)0 by 23:i and h3i2
h3i4. ? by h3i3 and h2i3
(I34) ^ i@f25g
^ i:flag
) (8p :: :p@f7::12g)
h1i1. Init ) i@f0g
) I34
h1i2. I34 ) I340
Assume: I34 ^ :I340
Prove: ?
h2i1. (i@f25g)0 by :I340
h2i2. i:flag0 by :I340
h2i3. (9p :: (p@f7::12g)0) by :I340
h2i4. _ 6:p ^ :Z
_ 20:i
_ 22:i ^ i:n � N
by I34 ^ :I340
Case: 6:p ^ :Z
h3i1. :i@f20::26g by I32 and :Z
h3i2. :(i@f20::26g)0 by 6:p and h3i1
h3i3. ? by h3i2 and h2i1
Case: 20:i
h3i1. (i@f21g)0 by 20:i
h3i2. ? by h3i1 and h2i1
42

Case: 22:i ^ i:n � N
h3i1. i@f22g by 22:i
h3i2. (8p :: i:n > p) by i:n � N
h3i3. i:flag by 22:i and h2i2
h3i4. (8p :: :p@f7::12g) by I33, h3i3, h3i1, and h3i2
h3i5. (8p :: :(p@f7::12g)0) by 22:i and h3i4
h3i6. ? by h3i5 and h2i3
The following assertion implies that the mutual exclusion property holds for the fast entry section.
(I35) ^ ((Ni :: i@f2g ^ X = i ^ Y = �1)+
(Ni :: i@f3g ^ X = i)+
(Ni :: i@f4g ^ X = i ^ Y = i)+
(Ni :: i@f5::7g ^ Y = i)+
(Ni :: i@f8::11g)) � 1
^ ((9p :: p@f8::11g) ) Y 6= �1)
h1i1. Init ) (8i :: i@f0g)
) I35
h1i2. I35 ) I350
Assume: I35 ^ :I350
Prove: ?
h2i1. _ ((Ni :: (i@f2g)0 ^ X0 = i ^ Y 0 = �1)+
(Ni :: (i@f3g)0 ^ X0 = i)+
(Ni :: (i@f4g)0 ^ X0 = i ^ Y 0 = i)+
(Ni :: (i@f5::7g)0 ^ Y 0 = i)+
(Ni :: (i@f8::11g)0)) > 1
_ ^ (9p :: (p@f8::11g)0)
^ Y 0 = �1
by :I350
h2i2. (Ni ::X0 = i) � 1 because process identi�ers are unique.
h2i3. ((Ni :: (i@f2g)0 ^ X 0 = i ^ Y 0 = �1)+
(Ni :: (i@f3g)0 ^ X0 = i)+
(Ni :: (i@f4g)0 ^ X0 = i ^ Y 0 = i)) � 1
by h2i2
h2i4. _ 1:q ^ Y = �1 ^ ((9p :: p@f8::11g) ) Y 6= �1)
_ 7:q ^ Y = q
_ 11:q
_ 25:q ^ q:flag
by I35 ^ :I350
Case: 1:q ^ Y = �1 ^ ((9p :: p@f8::11g) ) Y 6= �1)
h3i1. (8p :: :p@f8::11g) by Y = �1 and ((9p :: p@f8::11g) ) Y 6= �1)
h3i2. (8p :: :(p@f8::11g)0) by 1:q and h3i1
h3i3. Y 0 = �1 by 1:q and Y = �1
43

h3i4. (Ni :: (i@f5::7g)0 ^ Y 0 = i) = 0 by h3i3
h3i5. ? by h2i1, h2i3, h3i4, and h3i2
Case: 7:q ^ Y = q
h3i1. Y 0 = q by 7:q and Y = q
h3i2. ((Ni :: (i@f2g)0 ^ X0 = i ^ Y 0 = �1)+
(Ni :: (i@f3g)0 ^ X0 = i)+
(Ni :: (i@f4g)0 ^ X0 = i ^ Y 0 = i)+
(Ni :: (i@f5::7g)0 ^ Y 0 = i)+
(Ni :: (i@f8::11g)0)) � 1
by I35 and that 7:q decrements
(Ni :: i@f5::7g ^ Y = i) by one
when it increments (Ni :: i@f8::11g) by one.
h3i3. ? by h2i1, h3i1, and h3i2
Case: 11:q
h3i1. Y 0 = �1 by 11:q
h3i2. (Ni :: (i@f5::7g)0 ^ Y 0 = i) = 0 by h3i1
h3i3. (Ni :: (i@f8::11g)0) = 0 by I35 and that 11:q decrements (Ni :: i@f8::11g) by one.
h3i4. ? by h2i1, h2i3, h3i2, and h3i3
Case: 25:q ^ q:flag
h3i1. q@f25g by 25:q
h3i2. (8p :: :p@f7::12g) by I34, h3i1, and q:flag
h3i3. Y 0 = �1 by 25:q and q:flag
h3i4. (Ni :: (i@f5::7g)0 ^ Y 0 = i) = 0 by h3i3
h3i5. ? by h2i1, h2i3, h3i4, and h3i2
ENTRY2 and EXIT2 satisfy the following properties.
(I36) ((Ni :: i@f8::10g) � 1 ^ (Ni :: i@f15::27g) � 1) ) (Ni :: i@f9; 16::26g) � 1
i@f8g 7! i@f9g (L16)
i@f15g 7! i@f16g (L17)
The proof of (I36) is similar to that of (I8), and is omitted for brevity. The proof of (L16) and (L17) are
similar to that of (2SF), and are omitted for brevity. (Note that process identi�ers and function side are
used for convenience in the proof of (I8) and (2SF).)
The following two assertions imply that the mutual exclusion and starvation-freedom properties hold for
the algorithm of Figure 3.
(I37) (Ni :: i@f9; 16g) � 1
(I30), (I35), and (I36) imply that (I37) holds.
i@f1::8; 14; 15g 7! i@f9; 16g (L18)
44

By the program text, i@f1::7g 7! i@f8; 14g. (SF) implies that i@f14g 7! i@f15g. Hence, (L18) follows
from (L16) and (L17).
References
[1] A. Agarwal and M. Cherian, \Adaptive Backo� Synchronization Techniques", Proceedings of the 16th
International Symposium on Computer Architecture, May, 1989, pp. 396-406.
[2] J. Anderson, \A Fine-Grained Solution to the Mutual Exclusion Problem", Acta Informatica, Vol. 30,
No. 3, 1993, pp. 249-265.
[3] T. Anderson, \The Performance of Spin Lock Alternatives for Shared-Memory Multiprocessors", IEEE
Transactions on Parallel and Distributed Systems, Vol. 1, No. 1, January, 1990, pp. 6-16.
[4] BBN Advanced Computers, Inside the TC2000 Computer, February, 1990.
[5] K. Chandy and J. Misra, Parallel Program Design: A Foundation, Addison-Wesley, 1988.
[6] E. Dijkstra, \Solution of a Problem in Concurrent Programming Control", Communications of the
ACM , Vol. 8, No. 9, 1965, pp. 569.
[7] G. Graunke and S. Thakkar, \Synchronization algorithms for shared-memory multiprocessors", IEEE
Computer , Vol. 23, June, 1990, pp. 60-69.
[8] J. Kessels, \Arbitration Without Common Modi�able Variables", Acta Informatica, Vol. 17, 1982, pp.
135-141.
[9] L. Lamport, \A Fast Mutual Exclusion Algorithm", ACM Transactions on Computer Systems, Vol. 5,
No. 1, February, 1987, pp. 1-11.
[10] L. Lamport, \How to Write a Proof", Research Report 94, Digital Equipment Corporation Systems
Research Center, February, 1993.
[11] J. Mellor-Crummey and M. Scott, \Algorithms for Scalable Synchronization on Shared-Memory Multi-
processors", ACM Transactions on Computer Systems, Vol. 9, No. 1, February, 1991, pp. 21-65.
[12] M. Michael and M. Scott, \Fast Mutual Exclusion, Even With Contention", Technical Report, University
of Rochester, June, 1993.
[13] G. Peterson and M. Fischer, \Economical Solutions for the Critical Section Problem in a Distributed
System", Proceedings of the 9th ACM Symposium on Theory of Computing , May, 1977, pp. 91-97.
[14] E. Styer, \Improving Fast Mutual Exclusion", Proceedings of the Eleventh Annual ACM Symposium on
Principles of Distributed Computing , 1992, pp. 159-168.
[15] J. Yang and J. Anderson, \Fast, Scalable Synchronization with Minimal Hardware Support (Extended
Abstract)", Proceedings of the 12th Annual ACM Symposium on Principles of Distributed Computing ,
August, 1993, pp. 171-182.
[16] J. Yang and J. Anderson, \Time Bounds for Mutual Exclusion and Related Problems", Proceedings of
the 26th Annual ACM Symposium on Theory of Computing , May, 1994, pp. 224-233.
45





























