Embed Size (px)
Citation preview

A COMPARATIVE STUDY OF RAY AND WAVE
THEORY FOR PHASE CONTRAST
TOMOGRAPHY
A Thesis Submitted
in Partial Fulfillment of the Requirements
for the Degree of
Bachelor-Master of Technology(Dual Degree)
by
Jyoti Meena
DEPARTMENT OF ELECTRICAL ENGINEERING
INDIAN INSTITUTE OF TECHNOLOGY, KANPUR
September 2012



Abstract
In x-ray imaging, hard x-rays(high energy) characterized by straight path travel,
deep penetration and absorption provide a basic tool to estimate the internal structure
of the body. However because of high absorption and deep penetration, problems of
ionization also come into the picture. Increasing the x-ray dose to get a high resolution
image has emerged as a concerning and crucial factor in medical imaging. On the
other hand soft x-rays(low energy) are characterized by refraction, diffraction and they
are less absorbed. Their amplitude is affected by the absorption coefficient while their
phase is affected by the refractive index of the medium.
In this thesis, towards an objective of soft-tissue imaging with x-ray phase contrast
tomography, we make a novel comparative study of models and reconstructions in
ray-theoretic and wave-theoretic(Rytov approximation based) phase-contrast optical
tomography. Further, with the objective of enabling greater flexibility in modeling and
reconstruction schemes, a local plane wave approximation based phase-retrieval from
beam-deflection-data is proposed and evaluated. Reconstruction schemes in ray optical
tomography are typically based on beam-deflection and optical path length difference
data-types.
Further the use of wave-theoretic approaches such as the Rytov linearized approx-
imation enables us to conceptually better address the issues of multifrequency recon-
structions, since information observed by wave approximation are frequency dependent
while in ray approximation frequency comes in form of scaling factor, in addition the
Rytov approximation converts the nonlinear reconstruction problem of OPD-based
ray-inversion to a linear problem.

Dedicated to my parents...

Acknowledgements
First of all, I would like to thank my thesis supervisor, Dr. Naren Naik, for his
patience and continuous encouragement throughout this work. I am also grateful for
the independence. I would also like to thank Dr. Prabhat Munshi for his support,
guidance and most importantly for his blessings. A thanks also goes to all my friends
of past five years for their support and love.
Finally, I thank my parents, Lakhan Bai Meena and G. R. Meena, my sisters, Shashi
and Annu, and my brothers, Sumer Singh Meena and Shitanshu and Bhabhi for their
love, encouragement and unremitting support throughout my years of study. They
have made this work possible.

Contents
List of Figures 9
1 Introduction 1
2 Ray and wave theory modeling of phase difference data 11
2.1 Rytov approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.1 Validity conditions for Rytov approximation . . . . . . . . . . . 13
2.1.2 The Discretized Forward Model . . . . . . . . . . . . . . . . . . 14
2.2 Optical path length difference evaluation . . . . . . . . . . . . . . . . . 15
2.3 Regularized reconstruction via Rytov approximation . . . . . . . . . . . 16
2.3.1 The discretized forward solution . . . . . . . . . . . . . . . . . 16
2.3.2 Vector to grid interpolation . . . . . . . . . . . . . . . . . . . . 17
2.4 Numerical studies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4.1 Ray tracing in the angular displacement form . . . . . . . . . . 18
2.4.2 Rytov approximation . . . . . . . . . . . . . . . . . . . . . . . . 18
2.5 Reconstruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3 Deflection angle modeling and phase-retrieval 26
3.1 Ray approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2 Rytov approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.3 Phase data estimation from deflection angle data . . . . . . . . . . . . 33
7

3.3.1 Significance of the phase projection data detection . . . . . . . . 33
3.3.2 Local plane wave assumption phase retrieval . . . . . . . . . . . 34
3.4 Numerical Studies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.4.1 Paraxial ray model . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.4.2 Rytov approximation . . . . . . . . . . . . . . . . . . . . . . . . 37
3.4.3 Estimated phase . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.5 Reconstruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
3.5.1 Paraxial ray model . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.5.2 Rytov approximation . . . . . . . . . . . . . . . . . . . . . . . . 44
3.5.3 Estimated phase . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4 Summary and Perspective 51
A Derivation of the phase difference by Rytov approximation 53
A.1 Scattered Phase . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
A.2 Rytov approximation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
B Analytical Calculation of Coefficients 56
C Bicubic Interpolation 60
D Mapping from coarse grid to fine grid 63
E Representation of projection data with B-spline Interpolation 67
References 71

List of Figures
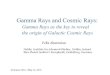
1.1 Phase shift and attenuation of a wave in a medium. Inside the medium
with refractive index n = 1 − δ − iβ. The wave get attenuated,phase
shifted and deflected with respect to the wave propagating in free space
indicated by green lines, blue lines and red lines respectively[1] . . . . . 5
1.2 Schematic drawing of several phase contrast imaging methods[2] . . . . 7
1.3 Basic Moire deflectometer setup for phase objects. P.O.: Phase object;
G1, G2: Ronchi rulings; S: mat screen [3] . . . . . . . . . . . . . . . . . 10
2.1 Geometry for beam-deflection tomography for Rytov approximation [4] 12
2.2 Comparison of phase data based on Rytov approximation with OPL
model for (a)different resolution, (b)receiver plane at different distances 19
2.3 Original phantom used in forward projection data calculation and re-
construction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.4 Comparison of phase difference projection data based on Rytov approx-
imation which is used in reconstruction with OPL model . . . . . . . . 21
2.5 Reconstruction from Rytov approximation by phase difference projec-
tion data, nrme = 12.95%, (b) Reconstructed phantom . . . . . . . . . 22
2.6 Original parabolic refractive-index phantom used in forward projection
data calculation and reconstruction . . . . . . . . . . . . . . . . . . . . 23
9

2.7 Reconstruction from Rytov approximation by phase difference projec-
tion data for parabolic refractive-index phantom, normalized root-mean-
square error(nrme) = 32.63%, (b) Reconstructed phantom . . . . . . . 24
3.1 Geometry for beam-deflection tomographic reconstruction [5] . . . . . . 27
3.2 Discrete representation of an object [4] . . . . . . . . . . . . . . . . . . 31
3.3 Comparison of ray theory based beam-deflections from paraxial approx-
imation and eikonal equation for (a) different resolution, (b) receiver
plane at different distances . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.4 Comparison of deflection angle projection data based on Rytov approx-
imation with the eikonal equation model for (a) different resolution, (b)
receiver plane at different distances . . . . . . . . . . . . . . . . . . . . 38
3.5 Estimated phase difference data from Rytov deflection angle data with
and without side lobes . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3.6 Estimated phase difference data from Rytov deflection angle data with
and without side lobes . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.7 Deflection angle projection data based on Rytov approximation and
paraxial ray model which have been used in reconstruction . . . . . . . 41
3.8 Reconstruction from paraxial ray model based deflection angle projec-
tion data for selfoc-microlens phantom with nrme = 13.76%, (b) Recon-
structed phantom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.9 Reconstruction from paraxial ray model based deflection angle projec-
tion data for parabolic refractive index phantom with nrme = 35.51%,
(b) Reconstructed phantom . . . . . . . . . . . . . . . . . . . . . . . . 43
3.10 Reconstruction from Rytov approximation based deflection angle pro-
jection data for selfoc-microlens phantom with nrme = 13.17%, (b) Re-
constructed phantom . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44

3.11 Reconstruction from Rytov approximation based deflection angle pro-
jection data for parabolic refractive index phantom with nrme = 32.57%,
(b) Reconstructed phantom . . . . . . . . . . . . . . . . . . . . . . . . 45
3.12 Reconstruction from estimated phase difference data(Detection plane at
L× 0.5), nrme = 50.19%, (b) Reconstructed phantom . . . . . . . . . . 46
3.13 Reconstruction from estimated phase difference data (Detection plane
at L× 0.5), nrme = 18.39%, (b) Reconstructed phantom . . . . . . . . 47
3.14 Reconstruction from estimated phase difference data for for parabolic
refractive-index phantom(Detection plane at L× 0.5), nrme = 64.77%,
(b) Reconstructed phantom . . . . . . . . . . . . . . . . . . . . . . . . 48
3.15 Reconstruction from estimated phase difference data for for parabolic
refractive-index phantom without side lobes (Detection plane at L×0.5),
nrme = 29.20%, (b) Reconstructed phantom . . . . . . . . . . . . . . . 49
B.1 Coordinate Transformation[4] . . . . . . . . . . . . . . . . . . . . . . . 57
C.1 For each of the four points in (a), we supplies one function value, two
first derivatives, and one cross-derivative, a total of quantities[6]. . . . . 61

Chapter 1
Introduction
1.1 Motivation
Evaluation of the internal structure of a material, a component or a system without
causing damage to it, is an important issue in various fields. Tomography is an imaging
modality which gives us information about the internal structure of an object via the in-
teraction of electromagnetic impulses with the unknown system[7]. This method is used
in radiology, archaeology, biology, geophysics, oceanography, astrophysics, material sci-
ence, astrophysics, quantum information, and many other sciences. Various sources like
x-rays in CT(Computerized Tomography), gamma rays in SPECT(Single-photon emis-
sion computed tomography), radio-frequency waves in MRI(Magnetic resonance imag-
ing), electron-positron annihilation in PET(Positron emission tomography), electrons
in TEM(Transmission electron microscopy), ions in atom probe, magnetic particles
in magnetic particle imaging etc. are used according to different characteristics and
applications of the medium.
X-rays have been useful tool in detection of pathology of the skeletal system and for
detecting the diseases in soft tissues as well. Computerized tomography, fluoroscopy,
radiotherapy etc. are some well-known tools for the detection and diagnose in the

2
medical field.
A single CT imaging procedure is sufficient to create a 3D model of the desired
part of body through the absorption properties. However, ionization of the body cells
caused by absorption may lead to some directly or indirectly damage to DNA in case
of high energy dose or repeatedly CT scan. The most common cancers caused by
radiation exposure are lung cancer, breast cancer, thyroid cancer, stomach cancer and
leukemia[8].
An important issue today is how to decrease the radiation dose during CT exam-
inations without reducing the image quality. Higher radiation dose would result in
higher-resolution image, while lower dose could lead to noise and unsharpness in im-
ages. Certainly, increasing the dosage quantity would increase adverse side effects in-
cluding risk of radiation induced cancer. In addition, image quality in CT is affected by
several artifacts like streak-artifact, partial volume effect, ring-artifact, noise-artifact,
motion-artifact, windmill and beam hardening. Beam hardening occurs because of the
frequency dependent difference in attenuation derived through position and different
energy level of the source.
In conventional absorption-based radiography, the x-ray phase shift information is
not used for image reconstruction. Phase shift is sensitive to the variation in refractive
index. For soft tissues in which absorbing elements are minimal but refractive index
variation is present; phase contrast tomography can play a significant role. Conse-
quently, phase signal can be obtained with much lower dose deposition than absorp-
tion; a very important issue when radiation damage has to be taken care of in living
systems.
Information regarding amplitude change of source while interacting with a medium

3
has been a well known aspect for determining the structure of the medium. The
change in phase and the change in the direction of traveling wave have emerged of
great importance due to the recent development of sensitive projection detectors[9, 10,
11, 12]. In this thesis towards a goal of soft tissues imaging with phase contrast x-ray
imaging, we have made a study of models and reconstructions in ray-theoretic[5] and
a Rytov approximation based wave-theoretic[4] phase contrast optical tomography.
A local plane wave approximation based phase-retrieval from deflection data is also
proposed to enable flexibility of reconstruction schemes.
1.2 X-ray through soft tissue
X-rays are electromagnetic radiation having wavelength in the range of 0.01 nm to
10 nm. Electromagnetic radiation interaction with medium can be typically modeled
based on wavelike or particle like properties of impulses.
Low energy x-rays interact with the whole atoms, moderate energy x-rays interact
with the electrons and high energy x-rays interact with the nuclei. There are five
kinds of interactions which are defined for x-ray and these are known as classical or
coherent-scattering, Compton-effect, photoelectric-effect, pair-production and photo-
disintegration. Photoelectric-effect is an absorbing process because x-ray attenuate
due to the change in their energy level by interaction with nuclei. When x-ray photons
are only partially absorbed, it is called a scattering process such as in the Compton-
effect, pair-production, photo-disintegration and classic-scatter.
Of the above five interactions, only two are concerns with absorption based diag-
nostic applications of x-rays, namely the Compton-effect and photoelectric-effect. If
we consider the deflection in the direction of x-rays while interacting with matter,
coherent-scattering comes into the picture.

4
Low energy x-rays of about 10keV interaction produce a change in the direction.
There is no loss of energy and no ionization. Low energy x-rays are of little impor-
tance in absorption based diagnostic techniques, but in the phase contrast tomographic
imaging they have been proven of great importance[13].
1.3 Complex Refractive Index
In general, when x-rays pass through a sample, their amplitude is decreased and their
phase is shifted as shown in fig. 1.1. This change can be described by a complex form
of refractive index of the medium(with real part deviating very slightly from unity),
n = 1− nδ − iβ (1.1)
where,
nδ = refractive index decrements causing phase shifts and
β = absorption coefficient,
µ =4πβ
λρ(1.2)
where,
µ = linear absorption coefficient for absorption imaging,
λ = wavelength and
ρ = mass density
Related phase change and attenuation on propagating a distance are given by,
φ =2π
λ
∫ z
0
nδ(x)dx and − logI
I0
=4π
λ
∫ z
0
β(x)dx (1.3)
where,
I0 = incident intensity and
I = final intensity

5
To see the effect of refractive index, consider a plane wave propagating through the
medium with refractive index n given as,
ψ(r) = E0eink.r = E0e
i(1−δ)k.re−βk.r (1.4)
where,
k = wave vector,
r = position vector and
E0 = amplitude of the electric field
Figure 1.1: Phase shift and attenuation of a wave in a medium. Inside the medium with
refractive index n = 1 − δ − iβ. The wave get attenuated,phase shifted and deflected
with respect to the wave propagating in free space indicated by green lines, blue lines
and red lines respectively[1]
The change in amplitude and intensity of a wave traveling through a medium rel-
ative to a wave traveling through vacuum(n=1 case) are given by eqn.1.5 and eqn.1.6
respectively.
∆E = E0(1− e−βkl) (1.5)

6
∆I = |E0|2 − |E0e−βkl|2 = I0 − I0e
−2βkl = I0(1− e−µl) (1.6)
where,
µ = 2kβ,
l = length of block of material
The second part of the refractive index is the real part δ. The real part follows
the phase difference of source wave relative to the wave traveling in the vacuum. This
change in phase at a point r = (x, y) is,
∆Φ = δk.r (1.7)
where,
δk = k − k0 with, k wave-number in medium and k0 wave-number in vacuum.
In general, equation1.7 can be rewritten as,
∆Φ = (k cos θ + k sin θ)
∫δ(x, y)dxdy (1.8)
where,
θ = deflection angle at r = (x, y)
The change in phase also results in a change in direction of the x-rays as seen in
fig. 1.1. The angular change in the direction with paraxial approximation is given by[5],
α =
∫∂(δ(x, y)dx)
∂y(1.9)
Now, we can see how the real and the imaginary parts of the refractive index affect
the wave as they pass through the material. This information may be use to measure
the real and imaginary parts of the refractive index, which are corresponding to phase
contrast imaging and the conventional attenuation-based imaging.

7
Reconstruction from phase data has certain advantages over reconstruction from
deflection angle data, which are:
1. In Rytov approximation based solution of beam deflection tomography, the
system of linear equations contains the data in the measurement operator; the recon-
struction thus potentially more susceptible to noise than the phase measurement based
ones.
2. The conceptually better utilization of multi-frequency information in the lin-
earized wave-theory type of inversions.
1.4 Methods for sensing the phase variations
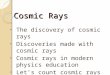
We have several ways, in which information regrading the phase can be achieved in the
form of forward projection data, shown in fig. 1.2[14].
Figure 1.2: Schematic drawing of several phase contrast imaging methods[2]
Crystal interferometer
Crystal interferometers uses a number of crystal reflections to split the x-ray beam and

8
let one of them pass through the sample before they recombine. A sketch of a crystal
interferometer set-up is shown in fig. 1.2(a), considered very good for synchrotron use
and high resolution studies.
It is based on the optical path length difference between the two beams, hence
limited by need for stability where small vibrations can change the optical path length
enough to disturb the measurements and also limited in the field of view by the size of
the crystal optics.
Analyzer based imaging
When well collimated x-ray beam passes through a sample, beam is slightly refracted.
In analyzer based imaging (ABI), refraction is imaged using the Bragg reflection of
one or multiple analyzer crystals. A sketch of an ABI setup is shown in fig. 1.2(b),
measures derivative of the phase.
This set-up is difficult to extend to tomography as crystals are normally aligned
such that derivative of refractive index is measured in direction parallel to tomographic
axis. Main limitations for source in laboratory are temporal coherence, which limits
available flux. Due to diffraction angles and sizes of analyzer crystals field of view will
normally also be limited. Also, the derivative of a quantity would be more susceptible
to noise than the quantity itself.
Propagation based imaging
A different approach to phase imaging is propagation based phase contrast. The prop-
agation based imaging(PBI) is in many senses the simplest kind of phase contrast
imaging, as no optical elements are required in beam and constraint on spectral width
is relaxed [15]. PBI relies upon on interference fringes arising in free space propaga-
tion in the Fresnel regime, as illustrated in fig.1.2(c). The measured intensity fringes
are thus not a direct measure of phase like the crystal interferometer, but rather the
Laplacian of phase front.

9
In order to achieve interference of propagating beam, a very high degree of spatial
coherence is required, and a high resolution detector is needed to observe the fringes.
A series of images is then recorded at different propagation distances in order to unam-
biguously determine the phase of the wave front. This method is particularly good at
edge enhancement, and is hence well suited for e.g. fiber samples, foam or localization
of in-homogeneity in metals also in tomography setup. However, for imaging of soft
tissue and small density variations this method is not optimal[16].
Grating based imaging
Grating based imaging (GBI) is related to the crystal interferometer in sense that it
consists of a beam splitter and a beam analyzer, and GBI is related to ABI by fact
that the first derivative of the phase front is measured. The beam splitter grating splits
beam by diffraction, but diffraction orders are separated by less than a milli-radian,
and diffracted beams are hence not spatially separated, but will interfere to create
an intensity pattern downstream of beam-splitter at a distance defined by the Talbot
effect, as shown in fig. 1.2(d).
Refraction in a sample is measured by detecting transverse shift of interference
pattern with a high resolution detector or an analyzer grating. Tomographic recon-
struction of differential phase is possible even without initial integration to retrieve the
quantitative phase shift, and this kind of tomographic reconstruction has turned out
to be an advantageous in local tomography.
Methods based on deflection angle projection data
On the basis of projection data, optical computerized tomography can be divided into,
phase tomography and deflection tomography. Phase tomography uses optical path
lengths of rays passing through test objects as projection data, such as in interferomet-
ric tomography or holography, while deflection tomography takes the deflection angles
of rays passing through test objects as projection data, such as in Moire deflectometry,

10
shadowgraphy, or a position-sensitive detector[17].
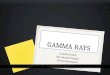
Figure 1.3: Basic Moire deflectometer setup for phase objects. P.O.: Phase object;
G1, G2: Ronchi rulings; S: mat screen [3]
Moire deflectometry shown in fig.1.3, is a noncoherent technique equivalent to in-
terferometry but, instead of measuring differences in optical path length (which are
proportional to refractive index), it measures ray deflection of a collimated beam
(which is proportional to refractive-index gradient). The accuracy of Moire deflec-
tometry is diffraction-limited like interferometry, but it is superior to interferometry
with respect to mechanical stability. The requirement for mechanical stability in Moire
deflectometry is one-tenth of the desired sensitivity, compared with λ/10 in interfer-
ometry. The deflection-angle measurement does not require a reference beam, and ap-
paratus for beam-deflection tomography is not as complicated as phase-measurement
tomography[18].

Chapter 2
Ray and wave theory modeling of
phase difference data
In this chapter we carry out modeling studies using Rytov and ray models with optical
path difference data. Reconstructions are shown for a Rytov approximation based
forward model.
2.1 Rytov approximation
The Rytov approximation is derived by considering the total field represented by a
complex phase [19].
u(r) = e(iφ(r)) (2.1)
The in-homogeneous wave equation would be given by
(∇2 + k2)u = 0 (2.2)
We can express the total complex phase,φ, as the sum of an incident phase function
φ0 and a scattered complex phase φs as
φ(r) = φ0(r) + φs(r) (2.3)

2.1 Rytov approximation 12
where
u0(r) = e(iφ0(r)) (2.4)
is the incident field.
We can obtain the equation for the scattered phase as[7]
(∇2 + k20)u0φs = −u0[(∇φs)2 + o(r)] (2.5)
Solving for φs, we obtain
φs =1
u0(r)
∫g(r− r′)u0[(∇φs)2 + o(r′)]dr′ (2.6)
The Rytov approximation assumes that the term in the square brackets in the above
equation can be approximated by
(∇φs)2 + o(r′) ∼= o(r′) (2.7)
thus, the first-order Rytov approximation to the scattered phase φs becomes
φs =1
u0(r)
∫g(r− r′)u0(r′)o(r′)dr′ (2.8)
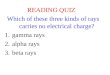
Figure 2.1: Geometry for beam-deflection tomography for Rytov approximation [4]
We can write the phase difference φ(r) as(derived in Appendix A)
φ(r) = ks0.r−(k2
4
)∫ ∫d2r′O(r′)[N0(kR)sin(ks0.R) + J0(kR)cos(ks0.R)] (2.9)

2.1 Rytov approximation 13
where,
O(r′) = 1− n2(r′)n0
2 = the object refractive index function and
R = r− r′ = the vector from detector point to sample point
Ni is the ith order Neuman function, and Ji is the ith order Bessel function. The
two components s0x and s0y of the unit propagation vector s0 are equal to 1 and 0,
respectively.
A couple of aspects in our problem are:
1. The geometrical dimensions of the variation in the distribution of the refractive
index n(r′) are much greater than the wavelength of the incident wave, i.e. one side
of element grid in which the refractive index is constant is much greater than the
wavelength.
2. The magnitude of the variation in the refractive index is small, i.e.the derivative
of refractive index has low value.
2.1.1 Validity conditions for Rytov approximation
In deriving the Rytov approximation we made the assumption that
(∇φs)2 + o(r′) ∼= o(r′) (2.10)
It is true only when
o(r′) (∇φs)2 (2.11)
If we write o(r′) in terms of the refractive index
o(r′) = k20[n2(r)− 1] (2.12)
= k20[(1 + nδ(r))2 − 1] (2.13)
= k20[(1 + 2nδ(r) + n2
δ(r))− 1] (2.14)
= k20[2nδ(r) + n2
δ(r)] (2.15)

2.1 Rytov approximation 14
For small nδ, the object function could be written linearly related to the refractive
index derivation as,
o(r′) ' 2k20nδ(r) (2.16)
So, the condition in eqn. (2.11) could be as,
nδ (∆φs)
2
k20
(2.17)
We can observe from here that the size of the object is not a factor in the Rytov
approximation. Putting expression for k0, we could find a necessary condition for the
validity of the Rytov approximation given as
nδ (
∆φsλ
2π
)2
(2.18)
The change in scattered phase over one wavelength is important. In this sense the
Rytov approximation is valid when the phase change over a single wavelength is small.
We can see that forward projection data based on phase difference differs for dif-
ferent wavelength as inside term integration terms depend upon the wave-number.
This proves that diffraction gives deep insight into the wave-material interaction than
refraction.
2.1.2 The Discretized Forward Model
We can write the total phase φ(r) obtained from Rytov approximation(given in ap-
pendix A)as,
φ(r) = ks0.r−(k2
4
)∫ xmax
xmin
∫ ymax
ymin
d2(r′)O(r′)[N0(kR)sin(ks0.R) + J0(kR)cos(ks0.R)]
(2.19)
where,
(xmin, ymin) = initial point in object plane,

2.2 Optical path length difference evaluation 15
(xmax, ymax) = final point in object plane
Phase difference could be written in a vector form as
∆φ = Ao, A ∈ <M×N , (2.20)
where,
Aij =
∫ xmax
xmin
∫ ymax
ymin
[N0(kR)sin(ks0.R) + J0(kR)cos(ks0.R)]dxdy (2.21)
o = Object array in vector form(∈ <N×1),
M = Total number of projections,
N = Total number of object elements(=J2)
2.2 Optical path length difference evaluation
Considering tomography based on axis-symmetric object and obtaining optical path
length measurements from that gives more general insight into the problem. Data
are obtained by interferometry, given section 1. The unknown refractive index field is
given by n(x, y). One ray travels a curved path through the object plane because of
refraction due to n(x, y), and the reference ray travels along a straight path through a
medium which has uniform refractive index n0. We have taken our field of interest in
2D circular plane. The optical path length difference is defined as[20],
OPL = ∆φ =
∫ rmax
rmin
(n(x, y)− n0)ds (2.22)
where,
ds = differential length of the ray,
rmin = initial point of interaction of ray with object plane,
rmax = leaving point of ray from object plane and

2.3 Regularized reconstruction via Rytov approximation 16
Ray path which is curved due to the refraction is governed by the ray equation[1].
Equation(2.22) gives us the phase difference obtained by the ray through the propa-
gation from refractive index plane. We are considering only the refraction effect and
neglecting the diffraction affect here with assuming size of in-homogeneity in soft tissues
is more than 100 times of the source radiation wavelength.
2.3 Regularized reconstruction via Rytov approxi-
mation
In this section, the linearized Rytov approximation is inverted to obtain reconstructions
of the unknown refractive index. Finding a solutions to a linear problems would involve
inversion of the forward model. Common types of solutions are the least squares, min-
imum norm, and weighted minimum norm solutions. A typical solution should depend
continuously on data to be stable. In our problem since typically the measurement
operator is ill-posed, we use regularization to produce stable reconstruction.
Typically two techniques dominate this problem, namely, Tikhonov regularization[21]
and truncated singular value decomposition(TSVD)[22]. A regularization method re-
places the original forward operator with a well-conditioned approximation that is close
to it.
2.3.1 The discretized forward solution
Phase difference given in a matrix form in eqn.(2.20). The linear least-square problem
can be expressed as,
minx‖Ao−∆φ‖22, M > N (2.23)
The above problem can be seen to be a discrete ill-posed problem since,
1. The singular values of A decay gradually to zero

2.3 Regularized reconstruction via Rytov approximation 17
2. The ratio between the largest and the smallest nonzero singular values is large.
Considering this, Tikhonov regularization has been used to solve the above linear
discrete ill-posed problem. It defined the regularized solution oλ as the minimizer of
the following weighted combination of the residual norm and the side constraint
oλ = arg min‖Ao−∆φ‖22 + λ2‖L(o− o∗)‖ (2.24)
Here, the matrix L is typically either the identity matrix In or a p×n discrete approx-
imation of the (n − p) − th derivative operator, in which case L is a banded matrix
with full row rank. Where regularization parameter λ controls the weight given to
minimization of the side constraint relative to minimization of the residual norm.
Numerical observation for oλ are composed by Tikhonov regularization given the
singular values of matrix A were decaying for the projection data.
2.3.2 Vector to grid interpolation
We came up with an interpolation scheme from 1D h vector to 2D phantom, since our
phantom is a function of vector h.
o = Ch (2.25)
where
C = interpolation matrix from h vector to 2D refractive index phantom(∈ <N×W ),
h = unknown vector (∈ <W×1) and
o = unknown object vector(∈ <N×1)
We have used bilinear interpolation to create interpolation matrix C. We can use
other basis to basis(2D to 2D) interpolation from coarse grid to fine grid in case of
non-symmetric object(given in appendixD).

2.4 Numerical studies 18
2.4 Numerical studies
2.4.1 Ray tracing in the angular displacement form
For an accurate forward data-set we need to know the exact ray path through the
object plane. Angular displacement form of eikonal equation has been used to trace
the ray at each step. Let θ to be ray angle with respect to x-axis, then this angle
should satisfy the following first-order differential equation[1],
dθ
ds=
1
n(cos θ
∂n
∂y− sin θ
∂n
∂x) (2.26)
Where ds is the differential length of the ray. Fourth-order Runge-Kutta method has
been used for updating θ based on eqn.(2.26).
2.4.2 Rytov approximation
A comparative analysis has been done for different resolution cases to show the res-
olution effect on the stability of the wave model. Phase data is much more stable
comparative to deflection angle data. Grid size d taken more than λ × 20 started
showing instability. Projection angle has been taken equal to 0.0 radians. For a stable
projection data case, N = 50 with d = λ × 32, we check the semi-near field and far
field approximation and their effect on image reconstruction. Phase data changes it’s
form although giving the accurate reconstruction.
Gaussian quadrature integration method [6] has been used to perform the 2D in-
tegration over the image element region with side length d for calculating the phase
difference with node points 5. For the reconstruction regularization tool has been used
from Per Christian Hansen[21] Matlab package.
Phase data is very much stable and give good reconstruction result for large range
with respect to resolution and receiver distances, thus we could say it is much more
computation friendly in comparison to the deflection angle data.

2.4 Numerical studies 19
Phase data stability
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Receiver line(m)
φ (r
adia
ns)
raywave with N=25wave with N=32wave with N=38wave with N=40wave with N=50
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Receiver line(m)
φ (r
adia
ns)
raywave with d=0.2Lwave with d=0.5Lwave with d=Lwave with d=3Lwave with d=5L
Figure 2.2: Comparison of phase data based on Rytov approximation with OPL model
for (a)different resolution, (b)receiver plane at different distances

2.5 Reconstruction 20
2.5 Reconstruction
Selfoc-microlens phantom
−4−2
02
4
x 10−4
−4
−2
0
2
4
x 10−4
0
0.2
0.4
0.6
0.8
1
x 10−3
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
1
2
3
4
5
6
7
8
x 10−4
Figure 2.3: Original phantom used in forward projection data calculation and recon-
struction
Wave approximation has been used in beam-deflection optical tomography measur-
ing the 2D densities. This algorithm measures 2D refractive index properties of the
selfoc-microlens phantom given by
n(r) = nc(1− βr2/2), r ≤ D/2, (2.27)
where,
r = distance from lens center,
nc = 1.558,
β1/2 = 0.225mm−1
The diameter of the phantom has been taken 0.25mm with total length of object
plane is taken to be L = 1mm.

2.5 Reconstruction 21
Phase data used in reconstruction for selfoc microlens phantom
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Receiver line(m)
φ (r
adia
ns)
raywave
Figure 2.4: Comparison of phase difference projection data based on Rytov approxi-
mation which is used in reconstruction with OPL model

2.5 Reconstruction 22
Reconstruction from phase data for selfoc microlens phantom
0 0.2 0.4 0.6 0.8 1 1.2
x 10−4
0
0.2
0.4
0.6
0.8
1x 10
−3
Distance from object−center(m)
Ref
ract
ive
inde
x(n(
r)−
n 0)
OriginalReconstructed
−4−2 0
2 4
x 10−4−4
−20
24
x 10−4
0
0.5
1
x 10−3
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
1
2
3
4
5
6
7
8
x 10−4
Figure 2.5: Reconstruction from Rytov approximation by phase difference projection
data, nrme = 12.95%, (b) Reconstructed phantom
Reconstruction from phase difference data gives much more accurate results shown
by fig. 2.5 in comparative to the deflection angle data which gives us the property of
computation compatibility of phase data.

2.5 Reconstruction 23
Parabolic refractive-index phantom
−4−2
02
4
x 10−4
−4
−2
0
2
4
x 10−4
0
1
2
3
4
5
6
x 10−4
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
x 10−4
Figure 2.6: Original parabolic refractive-index phantom used in forward projection
data calculation and reconstruction
A parabolic refractive-index phantom could be given by [23]
n(r) =
(n1
[1− 2∆( r
a)g]1/2
0 ≤ r ≤ a
n2 , r ≥ a
)(2.28)
with
∆ =n1
2 − h22
2n12
(2.29)
where,
n1 = refractive index of core center,
n2 = refractive index of cladding,
a = core radius and
g = a parameter signifies the difference of the refractive index profile (typically ≈ 2)

2.5 Reconstruction 24
Reconstruction for parabolic refractive-index phantom from phase data
0 0.2 0.4 0.6 0.8 1 1.2
x 10−4
−2
0
2
4
6
8x 10
−4
Distance from object−center(m)
Ref
ract
ive
inde
x(n(
r)−
n 0)
OriginalReconstructed
−4−2 0
2 4
x 10−4−4
−20
24
x 10−4
0
2
4
6
x 10−4
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
0
1
2
3
4
5
x 10−4
Figure 2.7: Reconstruction from Rytov approximation by phase difference projection
data for parabolic refractive-index phantom, normalized root-mean-square error(nrme)
= 32.63%, (b) Reconstructed phantom

2.6 Conclusions 25
2.6 Conclusions
In this chapter, we first compared optical path length difference data obtained by
solving the eikonal equation and a linearized(Rytov) approximation to the Helmholtz
equation. Subsequently, we demonstrate reconstructions for the Rytov-approximation
modelled data.
The phase data obtained from the two models is seen to be comparable; the results
obtained here need to be compared to experimental data to see which yeilds a close fit.
The results demonstrate the viability of Rytov-approximation based reconstructions
for essentially ray-domain problems.

Chapter 3
Deflection angle modeling and
phase-retrieval
In this chapter, two mathematical models have been discussed to interpret the linear
approximation of a forward model based deflection angle projection data. One is ray
approximation beam-deflection model [5] which assumes almost straight ray path due to
slight refractive index variation. Other is Rytov approximation based beam-deflection
which takes diffraction effects into account [4]. Both give forward projection data in
the form of deflection angle based on Moire deflectometry(beam-deflection) set-up.
3.1 Ray approximation
We have discussed in chapter 1 that x-rays are affected by refraction, diffraction and
absorption phenomenon based on the properties of the medium and wavelength of the
source radiation. In ray model, the diffraction effect has been neglected to concentrate
on the refraction effect. With refraction effects, geometrical propagation based concept
could be used. For the slight variation in refractive index we can apply the linear
approximation based on beam-deflection [5].

3.1 Ray approximation 27
Consider an index-of-refraction distribution given by n(x, y) as shown in fig.3.1.
The deflection angle θ of a ray projected at angle α at distance y′ from the x′ axis is
given by [5]
n
Figure 3.1: Geometry for beam-deflection tomographic reconstruction [5]
θ(y′, α) =−2
n20
∫ x′max
x′min
∂n(x′, y′)
∂y′dx′ (3.1)
where,
θ(y′, α) = final deflection angle for one projection,
x′min = initial interaction point of ray,
x′max = final interaction point of ray
The above equation has been derived by following assumptions:
(1) In-plane approximation: Electromagnetic radiation propagates in 3D space, by
in-plane approximation only 2D propagation in x − y plane has been considered in
above equation.
(2) Paraxial approximation: Projection rays are parallel to the x′-axis, refraction
should in principle affect wave propagation along both x′and y′ axis; we are assuming

3.1 Ray approximation 28
variations along y′-axis dominate variations along x′-axis; hence taking partial deriva-
tive along the y′-axis and integrating along the x′-axis.
Discretization of the forward problem
The differentiation along y′ in eqn.(3.1) at projection view angle α could be written
for y′ + ∆y′ → y′ with ∆y′ → 0 as
∂n(x′, y′)
∂y′=n(x′, y′ + ∆y′)− n(x′, y′)
∆y′(3.2)
In eqn.(3.2), we need to know the refractive index values at (x′, y′ + ∆y′) and at
(x′, y′). We have used 2nd order bicubic local piece-wise polynomial basis interpolation
function [24] to find the refractive index values at these points.
=aij(x
′, y′ + ∆y′)nj − bij(x′, y′)nj∆y′
(3.3)
=cij(x
′, y′)nj∆y′
(3.4)
where,
aij(x′, y′+∆y′) = the coefficients of interpolation function for ith ray and jth object
element,
bij(x′, y′) = the coefficients of interpolation function for ith ray and jth object ele-
ment and
cij(x′, y′) , aij(x
′, y′+∆y′)−bij(x′, y′) = the coefficients of interpolated differential
function at (x′, y′)
We can write eqn.(3.1) in the form of quadrature sum as
θ =−2
n20
N∑j=1
∫ x′max
x′min
∂n(x′, y′)
∂y′dx′ (3.5)

3.1 Ray approximation 29
Plugin eqn.(3.4) into eqn.(3.5) in form of
θ =−2
n20
N∑j=1
∫ x′max
x′min
cij(x′, y′)nj
∆y′dx′ (3.6)
Using Simpson’s (1/3)rd rule [6] for integration with respect to x′-axis could be express
for grid size(along x′-axis) x′ to x′ + ∆x′ as,
=∆x′
6
(cij(x
′, y′)nj∆y′
|x′ +cij(x
′, y′)nj∆y′
|x′+∆x′ + 4cij(x
′, y′)nj∆y′
| (x′+∆x′)2
)(3.7)
= Bij(x′, y′)nj (3.8)
where,
Bij(x′, y′) =
∆x′
6∆y′
(cij(x
′, y′)|x′ + cij(x′, y′)|x′+∆x′ + 4cij(x
′, y′)| (x′+∆x′)2
)(3.9)
Finally eqn.(3.1) in the following form could be used for numerical application.
θ =−2
n20
∫ x′max
x′min
∂n(x′, y′)
∂y′dx′ (3.10)
=−2
n20
N∑j=1
Bij(x′, y′)nj (3.11)
=N∑j=1
Aijoj (3.12)
= Ao (3.13)
where,
Aij = −2n2
0Bij = forward weighting matrix for paraxial ray model(∈ <M×N),
oj = (1− nj2
n02 ) = Object array in vector form(∈ <N×1),
M = Total number of projections,
N = Total number of object elements(=J2)
We should keep in mind that while we are calculating the weighting matrix A to
find the deflection angle forward projection data, we don’t know the actual ray path.
Using a straight ray path assumption is works because we dealing with only slightly
varying refractive index distribution in our problem.

3.2 Rytov approximation 30
3.2 Rytov approximation
Using the equations of the geometrical optics [25], we obtain the unity propagation
vector s of the scattered field U(r)
s =∇φ(r)
n0
(3.14)
The deflection angle corresponding to the scattered field on receiver line, given in
fig. 2.1 is thus written as
θ(r) = tan−1
(∂φ(r)∂y
∂φ(r)∂x
)(3.15)
Under the assumptions that are necessary for the eqn.(3.15), the Rytov approxi-
mation holds for the scattered field. The partial differentiation of the phase φ(r) with
respect to x could be obtained as given in appendix A.
∂φ(r)
∂x= ks0x −
(k2
4
)∫ xmax
xmin
∫ ymax
ymin
d2r′O(r′)[( kR
)(x− x′)J1(kR)− (ks0x)N0(kR)]cos(ks0.R)
− [(k
R)(x− x′)N1(kR)− (ks0x)J0(kR)]sin(ks0.R)
where,
O(r′) = 1− n2(r′)n0
2 = the object refractive index function and
R = r− r′ = the vector from detector point to sample point
Ni is the ith order Neuman function, and Ji is the ith order Bessel function. The
two components s0x and s0y of the unit propagation vector s0 are equal to 1 and 0,
respectively. We could obtain dφ(r)/dy by replacing x, x′, and s0xwith y, y′, and s0y,
respectively, in above equation.
Assuming that the object O(r′) is constant in a small square region whose sides
are of length d is called the image element and its region denoted by vector rj. The
object is represented by a square region that contains J × J image elements, and we

3.2 Rytov approximation 31
set oj = O(r′). A deflection angle θ(r) is detected at point r = ri, and the number of
detecting points is I. The value of ∂φ(r)/∂x at r = ri is denoted by ∂φi/∂xi.
Figure 3.2: Discrete representation of an object [4]
Then we can rewrite the partial phase derivatives as
∂φi/∂xi = ks0x + (k2
4)J2∑j=1
ojCij (3.16)
∂φi/∂yi = ks0y + (k2
4)J2∑j=1
ojDij (3.17)
where,
Cij =
∫ xmax
xmin
∫ ymax
ymin
d2rj[(k
Rij
)(xi − xj)J1(kRij)− (ks0x)N0(kRij)]cos(ks0.Rij)
− [(k
R)(xi − xj)N1(kRij)− (ks0x)J0(kRij)]sin(ks0.Rij)
Rij = ri − rj (3.18)
and Dij is obtained by replacing xi, xj and s0x with yi, yj ands0y, respectively, in above
equation.

3.2 Rytov approximation 32
We can also rewrite eqn. (3.15) by using eqn. (3.16) as follows
J2∑j=1
k(tan θiCij −Dij)Oj = −4s0x tan θi + 4s0y, θi = θ(ri) (3.19)
Discretization of the forward problem
Linear system of equation given in eqn.(3.19) could be written in matrix form as,
Ao = b (3.20)
where,
Aij = k(tan θiCij −Dij)
oj = (1− nj2
n02 ) ,
bi = −4s0x tan θi + 4s0y,
M = Total number of projections and
N = Total number of object elements(=J2)
The distribution of deflection angle θ(ri) on the receiver line is considered as pro-
jection data at one view angle. We could rotate the object and obtain projection data
at different view angles. The values of s0x and s0y are always 1 and 0, respectively,
and the vector ri is fixed or we can rotate the source and detector while holding object
still, which we can take s0x = cos θi, s0y = sin θi with ri values varying accordingly.
An analytical calculation to compute the coefficients Cij and Dij has been shown
in appendix B.
We could reconstruct the object plane by solving eqn.(3.20). Our weighting matrix
A have element in the form (tan θiCij −Dij), which depend upon the projection data
itself. In practical application, projection data always contains some amount of noise.
So, there is noise term sitting in the expression of the weighting matrix itself. This will

3.3 Phase data estimation from deflection angle data 33
typically create computational issues in the reconstructions. However, in the present
work, we have considered noiseless data since our preliminary focus was on model
comparison.
3.3 Phase data estimation from deflection angle data
3.3.1 Significance of the phase projection data detection
Phase contrast x-ray computerized tomography is a newly emerging technique because
of its advantage of low energy x-ray dose over high energy x-ray dose and easy detection
in soft tissues. Related to two kinds of projection data, phase-contrast tomography
can be divided into phase tomography and deflection tomography. The projection data
obtained from the phase tomography gives us the direct summation of the refractive
index known as optical path length of ray such as in interferometric tomography.
Pphase =
∫ rmax
rmin
n(r)d(r′) (3.21)
On the other hand projection obtained from deflection tomography gives us the sum-
mation of the derivative of the refractive index in the form of deflection angle of the ray
such in moire deflectometry. With paraxial approximation the deflection tomography
can be expressed by
Pdeflection =
∫ rmax
rmin
∂n(r)
∂yd(r′) (3.22)
Deflection tomography could be used in much practical condition, but projection
data(deflection angle) obtained from it is not very computation friendly in terms of
reconstruction process. Based upon local plane wave approximation, a phase-retrieval
could be obtained from deflection angle data. Reasonable reconstructions obtained
from this data using Rytov approximation based inversion are demonstrated.

3.3 Phase data estimation from deflection angle data 34
3.3.2 Local plane wave assumption phase retrieval
Considering a local plane wave approximation of the phase front at the receiver, we
can write for a deflection angle θ,
φ(x, y) = k(s.r) = k(x cos θ + y sin θ) (3.23)
where,
k = k0n = wave-number with k0 is the wave-number in vacuum and n is the medium
refractive index,
(x, y) = receiver vector points
Note that this approximation satisfies the relation equation(3.15). Initial phase is
given by
φ(x0, y0) = k(s0.r0) = k(s0xx0 + s0yy0) (3.24)
where,
(x0, y0) = initial vector point for plane wave in object plane
Phase difference can be written as
∆φ(r) = φ(x, y)− φ(x0, y0) (3.25)
The eqn.(3.25) shows an important way to reconstruction by deflection tomography.
Deflection projection can be converted to phase projection by means of eqn.(3.25).
Then practical algorithms used for phase tomography, such as FBP and ART, can be
applied to deflection tomography[17].

3.4 Numerical Studies 35
3.4 Numerical Studies
3.4.1 Paraxial ray model
Beam-deflection based on paraxial ray model derived deflection angle data has been
compared to the eikonal based angular displacement model for different resolutions
cases(N = 50, 40, 38, 32, 25).
Source with optical wavelength 0.63 µm has been used at 0.0 radians projection
angle. Beam-deflection data is not affected by changing the receiver plane distance,
because it is not specified based on far field or near field as described by fig. 3.3.
Reconstruction from estimated phase data has been done through the non-negative
least square toolbox given in matlab. Finally an interpolation for nonzero values has
been done to improve the reconstruction quality.

3.4 Numerical Studies 36
Paraxial ray model based deflection data stability
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
Receiver line(m)
θ (r
adia
ns)
rayparaxial with N=25paraxial with N=32paraxial with N=38paraxial with N=40paraxial with N=50
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
Receiver line(m)
θ (r
adia
ns)
rayparaxial with d=0.2Lparaxial with d=0.5Lparaxial with d=Lparaxial with d=3Lparaxial with d=5L
Figure 3.3: Comparison of ray theory based beam-deflections from paraxial approxi-
mation and eikonal equation for (a) different resolution, (b) receiver plane at different
distances

3.4 Numerical Studies 37
3.4.2 Rytov approximation
Rytov model based deflection angle projection data has been compared with the eikonal
equation solution for different resolutions cases(N = 50, 40, 38, 32, 25).
To calculate the coefficient Cij and Dij in 2D, Gaussian quadrature integration
method [6] has been used over the image element region with side length d with 5 node
points.
The grid size has also to be set-up for accurate reconstruction. Grid size has to be
greater than 25.2µm. Deflection angle forward projection data start to show instability
for d ≤ 25.2µm and so do the reconstruction images derived from it. We took grid size
d=λ× 32 with N = 50 for further analysis.
Observations have been taken for semi-near field(L × 0.5) to describe the receiver
distance effect on forward projection data and reconstruction. Forward projection data
shows the significance changes with respect to the distance of the receiver plane due
to the effect of evanescent waves. In practice, these evanescent waves always decays
rapidly far from the boundary, and can be ignored at a distance more than 10×λ from
an in-homogeneity.

3.4 Numerical Studies 38
Rytov approximation based deflection angle data stability
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
Receiver line(m)
θ (r
adia
ns)
raywave with N=25wave with N=32wave with N=38wave with N=40wave with N=50
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
Receiver line(m)
θ (r
adia
ns)
raywave with d=0.2Lwave with d=0.5Lwave with d=Lwave with d=3Lwave with d=5L
Figure 3.4: Comparison of deflection angle projection data based on Rytov approxi-
mation with the eikonal equation model for (a) different resolution, (b) receiver plane
at different distances

3.4 Numerical Studies 39
3.4.3 Estimated phase
Numerical Results have been obtained for the phase data obtained by above local plane
wave assumption and than compared to Rytov phase data.
In the far field, detected phase data would not get accurately reconstructed image,
but when we decreased the distance between image plane and the receiver to make it
in semi-near field, the image has improved.
Estimated phase difference from deflection angle data for selfoc microlens
phantom
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Receiver line(m)
φ (r
adia
ns)
original wave φestimated φ
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.2
0
0.2
0.4
0.6
0.8
Receiver line(m)
φ (r
adia
ns)
original wave φestimated φ (without side lobes)
Figure 3.5: Estimated phase difference data from Rytov deflection angle data with and
without side lobes

3.4 Numerical Studies 40
Side lobes in estimated phase data casing error in refractive index. We remove the
estimated phase data from homogeneous region which has no refractive index variation
to improve the accuracy in estimated phase data.
Estimated phase difference for parabolic refractive-index phantom
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Receiver line(m)
φ (r
adia
ns)
original wave φestimated φ
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
Receiver line(m)
φ (r
adia
ns)
original wave φestimated φ (without side lobes)
Figure 3.6: Estimated phase difference data from Rytov deflection angle data with and
without side lobes

3.5 Reconstruction 41
3.5 Reconstruction
Deflection data used in reconstruction
−4 −3 −2 −1 0 1 2 3 4
x 10−4
−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
Receiver line(m)
θ (r
adia
ns)
eikonalwaveparaxial
Figure 3.7: Deflection angle projection data based on Rytov approximation and parax-
ial ray model which have been used in reconstruction
Rytov approximation has been applied on N = 50 number of points with grid size
of d=λ× 32. L denotes the total length of the object plane. Both, paraxial ray model
based and Rytov approximation based deflection data used in reconstruction has been
shown in fig.3.7 in compare to standard Runge-Kutta method.

3.5 Reconstruction 42
3.5.1 Paraxial ray model
Reconstruction from paraxial ray model for selfoc microlens phantom
0 0.2 0.4 0.6 0.8 1 1.2
x 10−4
0
0.2
0.4
0.6
0.8
1x 10
−3
Distance from object−center(m)
Ref
ract
ive
inde
x(n(
r)−
n 0)
OriginalReconstructed
−4−2 0
2 4
x 10−4−4
−20
24
x 10−4
0
0.5
1
x 10−3
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
1
2
3
4
5
6
7
8x 10
−4
Figure 3.8: Reconstruction from paraxial ray model based deflection angle projection
data for selfoc-microlens phantom with nrme = 13.76%, (b) Reconstructed phantom
.

3.5 Reconstruction 43
Reconstruction from paraxial ray model for parabolic refractive index
phantom
0 0.2 0.4 0.6 0.8 1 1.2
x 10−4
−2
0
2
4
6
8x 10
−4
Distance from object−center(m)
Ref
ract
ive
inde
x(n(
r)−
n 0)
OriginalReconstructed
−4−2 0
2 4
x 10−4−4
−20
24
x 10−4
0
2
4
6
x 10−4
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
0
1
2
3
4
5
x 10−4
Figure 3.9: Reconstruction from paraxial ray model based deflection angle projection
data for parabolic refractive index phantom with nrme = 35.51%, (b) Reconstructed
phantom
.

3.5 Reconstruction 44
3.5.2 Rytov approximation
Reconstruction from Rytov approximation for selfoc microlens phantom
0 0.2 0.4 0.6 0.8 1 1.2
x 10−4
0
0.2
0.4
0.6
0.8
1x 10
−3
Distance from object−center(m)
Ref
ract
ive
inde
x(n(
r)−
n 0)
OriginalReconstructed
−4−2 0
2 4
x 10−4−4
−20
24
x 10−4
0
0.5
1
x 10−3
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
1
2
3
4
5
6
7
8
x 10−4
Figure 3.10: Reconstruction from Rytov approximation based deflection angle pro-
jection data for selfoc-microlens phantom with nrme = 13.17%, (b) Reconstructed
phantom
.

3.5 Reconstruction 45
Reconstruction from Rytov approximation for parabolic refractive index
phantom
0 0.2 0.4 0.6 0.8 1 1.2
x 10−4
−2
0
2
4
6
8x 10
−4
Distance from object−center(m)
Ref
ract
ive
inde
x(n(
r)−
n 0)
OriginalReconstructed
−4−2 0
2 4
x 10−4−4
−20
24
x 10−4
0
2
4
6
x 10−4
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
1
2
3
4
5
x 10−4
Figure 3.11: Reconstruction from Rytov approximation based deflection angle pro-
jection data for parabolic refractive index phantom with nrme = 32.57%, (b) Recon-
structed phantom
.

3.5 Reconstruction 46
3.5.3 Estimated phase
Reconstruction from estimated phase data has been done using non-negative con-
straints in least square method. After reconstruction, data needs to be interpolated
for non-zero values which provide more accuracy as shown in fig. 3.13. Normalized
root-mean-square error(nrme) are given with each figure.
Reconstruction from estimated phase data for selfoc microlens phantom
0 0.2 0.4 0.6 0.8 1 1.2
x 10−4
0
0.5
1
1.5
2x 10
−3
Distance from object−center(m)
Ref
ract
ive
inde
x(n(
r)−
n 0)
OriginalReconstructed
−4−2 0
2 4
x 10−4−4
−20
24
x 10−4
0
1
2
x 10−3
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
2
4
6
8
10
12
14
16
x 10−4
Figure 3.12: Reconstruction from estimated phase difference data(Detection plane at
L× 0.5), nrme = 50.19%, (b) Reconstructed phantom

3.5 Reconstruction 47
Reconstruction from estimated phase data without side lobes for selfoc
microlens phantom
0 0.2 0.4 0.6 0.8 1 1.2
x 10−4
0
0.2
0.4
0.6
0.8
1x 10
−3
Distance from object−center(m)
Ref
ract
ive
inde
x(n(
r)−
n 0)
OriginalReconstructed
−4−2 0
2 4
x 10−4−4
−20
24
x 10−4
0
0.5
1
x 10−3
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
1
2
3
4
5
6x 10
−4
Figure 3.13: Reconstruction from estimated phase difference data (Detection plane at
L× 0.5), nrme = 18.39%, (b) Reconstructed phantom

3.5 Reconstruction 48
Reconstruction for parabolic refractive-index phantom
0 0.2 0.4 0.6 0.8 1 1.2
x 10−4
0
0.2
0.4
0.6
0.8
1
1.2
1.4x 10
−3
Distance from object−center(m)
Ref
ract
ive
inde
x(n(
r)−
n 0)
OriginalReconstructed
−4−2 0
2 4
x 10−4−4
−20
24
x 10−4
0
0.5
1
1.5
x 10−3
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
0
0.2
0.4
0.6
0.8
1
1.2
x 10−3
Figure 3.14: Reconstruction from estimated phase difference data for for parabolic
refractive-index phantom(Detection plane at L × 0.5), nrme = 64.77%, (b) Recon-
structed phantom

3.5 Reconstruction 49
Reconstruction for parabolic refractive-index phantom without side lobes
0 0.2 0.4 0.6 0.8 1 1.2
x 10−4
0
2
4
6
8x 10
−4
Distance from object−center(m)
Ref
ract
ive
inde
x(n(
r)−
n 0)
OriginalReconstructed
−4−2 0
2 4
x 10−4−4
−20
24
x 10−4
0
0.5
1
x 10−3
x−axis(m)y−axis(m)
Obj
ect f
unct
ion(
O(r
))
1
2
3
4
5
6x 10
−4
Figure 3.15: Reconstruction from estimated phase difference data for for parabolic
refractive-index phantom without side lobes (Detection plane at L × 0.5), nrme =
29.20%, (b) Reconstructed phantom

3.6 Conclusions 50
3.6 Conclusions
In this chapter, we have compared beam deflection data obtained from forward models
based on the ray-equation(paraxial approximation and the eikonal-equation) and the
Rytov approximation.
We observe that the deflection data and reconstruction obtained from the Rytov
approximation is quite sensitive to the location of the detector plane. Best reconstruc-
tion were seen to be obtained fro receiver distances about half the object size. This
observation needs to be further analyzed.
The local plane wave assumption based phase-retrieval gives phase data that needs
incorporation a prior support information to achieve acceptable levels of data and
reconstruction correlation with the ground truth. This is an encouraging result gives
a direction to look into for further development of more sophisticated schemes.

Chapter 4
Summary and Perspective
Comparison of ray and wave model
Low dose x-ray imaging of phase objects is an emerging modality in x-ray tomography.
Most of the algorithms typically use ray theory reconstructions based on beam deflec-
tion data since it is easier to obtain than phase difference data. Keeping in mind that
x-ray source are typically not monochromatic, we need to investigate the use of wave
theoretic model for reconstructions from beam deflection and phase difference data,
since they better use multifrequency information.
In this thesis, we made a novel comparative study of models and reconstructions in
ray theoretic and wave theoretic(Rytov approximation based) phase-contrast optical
tomography. The present comparative studies between ray and wave theory based mod-
els have been carried out at optical frequencies to compare results in known benchmark
cases.
The Ray approximation is derived with refraction effect domination which happens
when the in-homogeneity is much larger than the wavelength of the source radiation.
When size of homogeneity becomes comparable to the wavelength of the source radi-

52
ation, diffraction effects dominate, which we model on the basis of wave theory in the
Rytov approximation. Comparison of these two techniques to derive the forward pro-
jection data (deflection and phase) gives the important insight in terms of limitations
of the respective approximation.
Phase data is much more stable than deflection data both in the sense of resolutions,
receiver distance and quality of reconstructions. However, the physical instrumentation
set-up for phase-data is very sensitive and has difficulty with large specimen.
Deflection angle data is very sensitive to receiver distance and resolution. The
error in reconstructed images changes quickly when we alter any of the two above.
Ray modeled beam-deflection however sustains stability with respect to far field and
near field, but obtained reconstructed image quality was not very good.
Estimation of phase data
Computationally phase data is more beneficial. The deflection angle data model ob-
tained from Rytov approximation contains measurements in it’s measurements matrix,
however deflection data can be obtained in much more practical and applicable scenar-
ios than phase data making it potentially susceptible to noise.
In the present work, we have utilized a local plane wave approximation to estimate
the phase from the beam deflections. The reconstruction results obtained are en-
couraging enough to motivate the use of deflection data in subsequent phase retrieval
schemes.

Appendix A
Derivation of the phase difference
by Rytov approximation
A.1 Scattered Phase
Scattered phase for in-homogeneous wave from [7] is given by
φs =1
u0(r)
∫g(r− r′)u0[(∇φs)2 + o(r′)]dr′ (A.1)
where,
φs= Scattered phase for in-homogeneous wave,
u0 = A exp (jk0s.r) = incident field for plane wave,
g(r− r′) = i4H
(1)0 (k0R) = Green’s function in 2D with R = |r− r′|
o(r′) = k20[n2(r)− 1] = Object-plane function in terms of refractive index
where n(r) is the electromagnetic refractive index of the media and is given by
n(r) =
√µ(r)ε(r)
µ0ε0(A.2)
Here we have used µ and ε to represent the magnetic permeability and dielectric con-
stant and the subscript zero to indicate their average values. k0 indicates the wave-

A.2 Rytov approximation 54
number in vacuum. s is unit propagation vector and r shows receiver plane vector,
whereas r′ shows the position of a point in object plane.
A.2 Rytov approximation
Using the Rytov approximation we assume that the term in brackets in the above
equation can be approximated by
(∇φs)2 + o(r′) ∼= o(r′) (A.3)
applying this, the first-order Rytov approximation to the function of scattered phase
φs becomes
φs =1
u0(r)
∫g(r− r′)u0(r′)o(r′)dr′ (A.4)
φs(r) =1
u0(r)
∫g(r− r′)u0(r′)o(r′)dr′ (A.5)
where, the Green’s function is given by
g(r− r′) =i
4H
(1)0 (k0R) (A.6)
with the first kind Hankel function of zero-order(Bessel function of third kind). Hankel
function is given by,
H(1)0 (k0R) = J0(k0R) + iN0(k0R) (A.7)
where,
J0(k0R) = Bessel function of first kind and
N0(k0R) = Bessel function of second kind (Neumann function)
Putting eqn.(A.6) and (A.7) into the eqn.(A.5), we get
φs(r) =1
u0(r)
∫i
4(J0(kR) + iN0(kR))u0(r′)o(r′)dr′ (A.8)

A.2 Rytov approximation 55
now, putting the expression for incident field and the object plane in above equation
gives,
φs(r) =1
A exp (ik0s.r)
∫i
4(J0(kR) + iN0(kR))A exp (ik0s.r
′)k2(n2(r′)− 1)dr′
= −∫ik2
4(J0(kR) + iN0(kR)) exp (ik0s.(r
′ − r))(1− n2(r′))dr′
= −k2
4
∫i(J0(kR) + iN0(kR)) exp (−ik0s.(r− r′))(1− n2(r′))dr′
Using Euler’s formula and putting O(r′) = (1 − n2(r′)) with R = r− r′ in above
equation we get,
φs(r) = −k2
4
∫i(J0(kR) + iN0(kR))× (cos (k0s.R)− i sin (k0s.R))O(r′)dr′
= −k2
4
∫i(J0(kR)× cos (k0s.R) +N0(kR)× sin (k0s.R))
(J0(kR)× sin (k0s.R)−N0(kR)× cos (k0s.R))O(r′)dr′
The second term in the integration is real and is accountable for amplitude change.
For scattered phase term we would have the expression
φs(r) = −k2
4
∫(J0(kR)× cos (k0s.R) +N0(kR)× sin (k0s.R))O(r′)dr′ (A.9)
Initial phase is given by φ0(r) = ks0.r, then the total scattered phase would be
∆φ(r) = φ0(r)− φs(r) (A.10)
= ks0.r−k2
4
∫(J0(kR)× cos (k0s.R) +N0(kR)× sin (k0s.R))O(r′)dr′
(A.11)
as given in the eqn.(2.9).

Appendix B
Analytical Calculation of
Coefficients
We can reduce the double integral to calculate the coefficients given in Rytov approx-
imation to a single integral. We eliminate the suffix ij of R and R for simplicity.
We take the assumption of R is a few millimeters here, so the value of kR can be
considered as infinite. Then Bessel and Neuman functions are approximated in their
asymptotic form as below
J1(kR) ∼(
2
πkR
)1/2
cos
(kR− 3π
4
)(B.1)
N1(kR) ∼(
2
πkR
)1/2
sin
(kR− 3π
4
)(B.2)
J0(kR) ∼(
2
πkR
)1/2
cos(kR− π
4
)(B.3)
N0(kR) ∼(
2
πkR
)1/2
sin(kR− π
4
)(B.4)
Second assumption is the length d of the sides of an image element is so small that
the values of (kR)3/2(xi − xj) and (1/R)1/2 in coefficients estimation do not change

57
greatly when the vector rj moves in the region of an image element, then these factors
can be moved out of the integral. Then integral eqn. could be rewritten as
Cij =
(2k
πR3
)1/2
(xi − xj)∫ ∫
d2rjcos
(kR− 3π
4
)cos(ks0.R)
+
(2k
πR
)1/2
s0x
∫ ∫d2rjsin
(kR− π
4
)cos(ks0.R)
−(
2k
πR3
)1/2
(xi − xj)∫ ∫
d2rjsin
(kR− 3π
4
)sin(ks0.R)
−(
2k
πR
)1/2
s0x
∫ ∫d2rjcos
(kR− π
4
)sin(ks0.R) (B.5)
r
r
r r
r
Figure B.1: Coordinate Transformation[4]
To reduce the double integral to a single integral in eqn. B.5, we introduce a new
variable γ defined by the angle between the vector R and the direction of the x axis,
as shown in fig. B.1. Using the variable γ, we have
ks0.R = k(s0xcosγ + s0ysinγ)R = KγR (B.6)

58
The integral element d2rj is replaced with RdRdγ, and R changes from R1γ to R2γ
at the angle γ, which changes from γ1 to γ2 in an image element, as shown in fig. B.1.
So, we can rewrite eqn. B.5 as
Cij =
(2k
πR3
)1/2
(xi − xj)∫ γ2
γ1
∫ R2γ
R1γ
cos
(kR− 3π
4
)cos(KγR)RdRdγ
+
(2k
πR
)1/2
s0x
∫ γ2
γ1
∫ R2γ
R1γ
sin(kR− π
4
)cos(KγR)RdRdγ
−(
2k
πR3
)1/2
(xi − xj)∫ γ2
γ1
∫ R2γ
R1γ
sin
(kR− 3π
4
)sin(KγR)RdRdγ
−(
2k
πR
)1/2
s0x
∫ γ2
γ1
∫ R2γ
R1γ
cos(kR− π
4
)sin(KγR)RdRdγ (B.7)
The first integral term F1 in eqn. B.7 can be expressed as
F1 =
∫ γ2
γ1
∫ R2γ
R1γ
(cos
((k +Kγ)R−
3π
4
)+ cos
((k −Kγ)R−
3π
4
))RdRdγ
=
∫ γ2
γ1
∫ R2γ
R1γ
(Rcos
((k +Kγ)R−
3π
4
)+Rcos
((k −Kγ)R−
3π
4
))dRdγ
=
∫ γ2
γ1
[
(R
∫ R2γ
R1γ
cos
((k +Kγ)R−
3π
4
)dR +
∫ R2γ
R1γ
dR
dR
∫ R2γ
R1γ
cos
((k +Kγ)R−
3π
4
)dR
)
+
(R
∫ R2γ
R1γ
cos
((k +Kγ)R−
3π
4
)dR +
∫ R2γ
R1γ
dR
dR
∫ R2γ
R1γ
cos
((k +Kγ)R−
3π
4
)dR
)]dγ
=
∫ γ2
γ1
[
(Rsin
((k +Kγ)R− 3π
4
)(k +Kγ)
|R2γ
R1γ−∫ R2γ
R1γ
sin((k +Kγ)R− 3π
4
)dR
(k +Kγ)dR
)

59
+
(Rsin
((k −Kγ)R− 3π
4
)(k −Kγ)
|R2γ
R1γ−∫ R2γ
R1γ
sin((k −Kγ)R− 3π
4
)dR
(k −Kγ)dR
)]dγ
=
∫ γ2
γ1
[
(Rsin
((k +Kγ)R− 3π
4
)(k +Kγ)
+cos((k +Kγ)R− 3π
4
)(k +Kγ)
2
)
+
(Rsin
((k −Kγ)R− 3π
4
)(k −Kγ)
+cos((k −Kγ)R− 3π
4
)(k −Kγ)
2
)]|R2γ
R1γ]dγ (B.8)
By above two assumptions, we can neglect term with 1/(k −K2I±)
in eqn. B.8
F1 =
∫ γ2
γ1
[
(Rsin
((k +Kγ)R− 3π
4
)(k +Kγ)
+Rsin
((k −Kγ)R− 3π
4
)(k −Kγ)
)|R2γ
R1γ]dγ (B.9)
So, eqn. B.7 becomes
Cij =
(2k
πR3
)1/2
(xi − xj)∫ γ2
γ1
[
(Rsin
((k +Kγ)R− 3π
4
)(k +Kγ)
+Rsin
((k −Kγ)R− 3π
4
)(k −Kγ)
)|R2γ
R1γ]dγ
+
(2k
πR
)1/2
s0x
∫ γ2
γ1
[
(−Rcos
((k +Kγ)R− π
4
)(k +Kγ)
−Rcos
((k −Kγ)R− π
4
)(k −Kγ)
)|R2γ
R1γ]dγ
−(
2k
πR3
)1/2
(xi − xj)∫ γ2
γ1
[
(Rsin
((k +Kγ)R− 3π
4
)(k +Kγ)
−Rsin
((k −Kγ)R− 3π
4
)(k −Kγ)
)|R2γ
R1γ]dγ
−(
2k
πR
)1/2
s0x
∫ γ2
γ1
[
(−Rcos
((k +Kγ)R− π
4
)(k +Kγ)
−Rcos
((k −Kγ)R− π
4
)(k −Kγ)
)|R2γ
R1γ]dγ
Cij = 2
∫ γ2
γ1
((2kπR3
)1/2(xi − xj)
(k +Kγ)RRsin
((k +Kγ)R−
3π
4
)−(
2kπR
)1/2s0x
(k −Kγ)RRsin
((k −Kγ)R−
3π
4
))|R2γ
R1γ]dγ
(B.10)
Dij could be obtained similarly for y axis.

Appendix C
Bicubic Interpolation
We represented the object in the square region that contains J × J image elements.
The length of the one image element in kept so small, so that it could satisfy the
assumptions which were necessary in the Rytov approximation. Hence, the number of
J2 may become large, we reduce the number of unknown by using only the unknowns
Og whose element are located at intervals of distance L × d. The number g may be
given by
g = 1 + (u− 1)L+ (v − 1)L× J, (u, v) = 1 ∼ N, (C.1)
where the number of unknowns is N2 and J = (N − 1)L + 1. After reconstructing
the object Og which is obtained with the reduced dimension, original object can be
interpolated by bi-cubic Interpolation [6].
The interpolated surface can then be written as
p(x1, x2) =∑3
i=0
∑3
j=0aij(x1 − x1l)
i(x2 − x2l)j (C.2)
x1l, x2l are the coordinates of the lower left corner of the grid square corresponding to
(x1, x2)[1].
We can find the values of aij by given function values and their derivative grouping

61
Figure C.1: For each of the four points in (a), we supplies one function value, two first
derivatives, and one cross-derivative, a total of quantities[6].
the unknown parameters aij in a vector,
Γ = [a00 a10 a20 a30 a01 a11 a21 a31 a02 a12 a22 a32 a03 a13 a23 a33]T (C.3)
and
X = [f(0, 0) f(1, 0) f(0, 1) f(1, 1) fx1(0, 0) fx1(1, 0) fx1(0, 1) fx1(1, 1) ...
fx2(0, 0) fx2(1, 0) fx2(0, 1) fx1(1, 1) fx1x2(0, 0) fx1x2(1, 0) fx1x2(0, 1) fx1x2(1, 1)]T
We can written above two vectors in the form of linear equation
CΓ = X (C.4)
where,

62
C−1 =
1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
1 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0
1 0 0 0 1 0 0 0 1 0 0 0 1 0 0 0
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0
0 1 2 3 0 0 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 1 0 0 0 1 0 0 0 1 0 0
0 1 2 3 0 1 2 3 0 1 2 3 0 1 2 3
0 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 1 1 1 1 0 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0 2 0 0 0 3 0 0 0
0 0 0 0 1 1 1 1 2 2 2 2 3 3 3 3
0 0 0 0 0 1 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 1 2 3 0 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 2 0 0 0 3 0 0
0 0 0 0 0 1 2 3 0 2 4 6 0 3 6 9
Γ = C−1X, (C.5)

Appendix D
Mapping from coarse grid to fine
grid
Often in practical scenario for non-symmetric object we can fulfill the condition given
in eqn.(2.23) by having multiple projections at different angle. In this case we need to
to a 2D to 2D mapping from coarse grid to fine grid.
We create a projection vector to map from a coarse grid base to fine grid base.
Practically,the fine grids for reconstruction are hard to achieve, so interpolation from
coarse grid to fine grid is necessary to carry out backward process with good basis. In
model-based image reconstruction problems, a parameter may have a different basis
representation in the forward and inverse model and must be mapped whenever the
forward solver presented. We use bicubic piecewise polynomial basis for this purpose.
It could be done simply mapping the coarse grid to fine grid through vector projection.
The projection matrix for this mapping can be derived as follows, Let bP and bB
be two orthonormal basis expansions of domain Ω, so that the continuous function f(r)
is represented as
f(r) ≈ fP (r) =
NP∑k=1
F Pk b
Pk (r) (D.1)
where,

64
bPk (r) = pixel basis,
NP = number of points in fine grid
f(r) ≈ fB(r) =
NB∑k=1
FBk b
Bk (r) (D.2)
where,
bBk (r) = bicubic piece-wise polynomial basis
NP = number of points in coarse grid
To look into bicubic piece-wise polynomial basis, let us first assume a rectangular
shaped domain Ω = (x, y)|0≤x≤dx and 0≤y≤dy. Let δx be the grid spacing in the
x axis and δy be the grid spacing in y axis, so the center cij of basis function bij(r) is
located at
cij = (iδx, jδy) (D.3)
Then bij(r) is given by
bij(x, y) = bijx (x)× bijy (y), (D.4)
and
bijx (x) =
(1− x if dx ≤ 1,
0 if dx > 1
), dx =
|x− iδx|δx
(D.5)
and
bijy (y) =
(1− y if dy] ≤ 1,
0 if dy > 1
), dy =
|y − iδy|δy
(D.6)
where, i and j denotes the location of the co-ordinates of lower left corner in respective
grid[1] with k = (i− 1)N + j.
This approach can be extended to piece-wise nth order polynomials as an approx-
imation to the sinc function kernel of the box filter. We can also consider a tricubic

65
regular grid, with basis functions given by
bijx (x) =
(112
[|dx − 2|3 − 4|dx − 1|3 + 6|dx|3 − 4|dx + 1|3 + |dx|+ 23] if dx ≤ 1,
0 if dx > 1
),
(D.7)
and
bijy (y) =
(112
[|dy − 2|3 − 4|dy − 1|3 + 6|dy|3 − 4|dy + 1|3 + |dy|+ 23] if dy ≤ 1,
0 if dy > 1
),
(D.8)
Piece-wise polynomial basis satisfy the normalization condition∑i,j
bij(r) = 1 (D.9)
The discrete vectors F P ∈ RNP and FB ∈ RNB are given by
F Pk =
∫Ω
f(r)bPk (r)dr, (D.10)
FBk =
∫Ω
f(r)bBk (r)dr (D.11)
The mapbB → bP is thus obtained from
F Pk =
∫Ω
fB(r)bPk (r)dr =
NB∑q=1
FBq
∫Ω
bPk (r)bBq (r)dr (D.12)
or
F P ≈ PFB (D.13)
where,
P ∈ RNPNB = the projection matrix for the map bB → bP,
PT ∈ RNBNP = the map bP → bB
If both bP and bB are local basis expansions then the projection matrices will be
sparse.

66
The forward model for fine grid can be represent in pixel basis form given by,
AF P = t (D.14)
where,
t = projection data,
A = forward matrix and
F P = fine grid discretization
We apply the reconstruction algorithms on matrix A for eqn.(D.14). This equation
could be convert in the form of coarse grid representation with bicubic piece-wise poly-
nomial basis through projection matrix P by putting eqn.(D.13 into the eqn.(D.14))
given as,
A(PFB) = t (D.15)
A′FB = t (D.16)
where,
A′ = AP = forward matrix and
FB = coarse grid discretization
Now, we apply the reconstruction algorithms on matrix A′ for eqn.(D.16), which is
typically works on given corase grid and give the solution in fine grid.
Coarse grid has been taken with d=λ×128, which gives N = 13 point to interpolate.
Fine grid has been obtained through projection matrix, which is working fine for 1→ 4
interpolation. Number of points in fine grid are N = 50.

Appendix E
Representation of projection data
with B-spline Interpolation
Deflection angle projection data given by Rytov approximation is
tan θ(r) =
(∂φ(r)∂y
∂φ(r)∂x
)(E.1)
We can always represent phase as function of (x, y) plane given by [26]
φ(r) = φ(x, y) =1
36
3∑m=0
3∑n=0
Pm(u)Pn(v)q(xi+m−1, yj+n−1) (E.2)
where, i and j denotes the location of the co-ordinates of lower left corner in respective
grid[1].
The above equation, phase is given in form of Interpolation through B-spline func-
tion. The polynomial P(u) and P(v) are defined by

68
P0(u)
P1(u)
P2(u)
P3(u)
=
−1 3 −3 1
3 −6 0 4
−3 3 3 1
1 0 0 0
u3
u2
u
1
q denotes the control point vector on the (x, y) plane and (u, v) are given by
u = x−xi∆, xi−1 = xi −∆ < x < xi + ∆ = xi+1
v = y−yi∆, yi−1 = yi −∆ < y < yi + ∆ = yi+1
and ∆ is the mesh size.
The polynomial Pm(u) can also be defined recursively for m order in terms of x
co-ordinates of control point vector q as follows
Pmk (x) =
x− xkxk+m − xk
Pm−1k (x) +
xk+m+1 − xxk+m+1 − xk+1
Pm−1k+1 (x) (E.3)
In our case m = 3, so we have
P3k(x) =
x− xkxk+3 − xk
P2k(x) +
xk+4 − xxk+4 − xk+1
P2k+1(x) (E.4)
The zeroth order polynomial P is defined as
P0k(x) = U(x− xk)U(xk+1 − x) (E.5)
where,
U = unit step function defined on x
k = number of control points
The partial differentiation of φ(x, y) could be given in terms of differentiation of
B-spline polynomial like

69
∂φ(x, y)
∂x= φx(x, y) =
1
36
3∑m=0
3∑n=0
Pmx(u)Pn(v)q(xi+m−1, yj+n−1) (E.6)
where, Pmx(u) is given by
P0x(u)
P1x(u)
P2x(u)
P3x(u)
=1
∆
−3 6 −3 0
9 −12 0 0
−9 6 3 0
3 0 0 0
u2
u
1
0
φx(x, y) could also be obtained by Pn(v) respectively.
Putting these expressions in the eqn.(E.1), we get
tan θ(r) =
(φy(x, y)
φx(x, y)
)(E.7)
φx(x, y) tan θ(x, y) = φy(x, y) (E.8)
In the matrix form, the above equation could be represented by,
(Ax × tan θ)q = Ayq (E.9)
(Ax × tan θ −Ay)q = 0 (E.10)
Aq = 0 (E.11)
where,
A = Ax × tan θ −Ay,
Ax = φx(x, y) = 1∆36
∑3m=0
∑3n=0 Pmx(u)Pn(v),

70
Ay = φy(x, y) = 1∆36
∑3m=0
∑3n=0 Pm(u)Pny(v),
By this method, Control point vector q may be determined by the solution of
eqn.(E.11). Phase could be determined the B-spline interpolation of q vector. However,
in our numerical calculation A was coming to be full rank, so the only possible solution
for q was the trivial solution.

References
[1] A. H. Andersen and A. C. Kak, “Digital ray tracing in two-dimensional refractive
field,” Journals of Acoustical Society of America, vol. 16, no. 3, pp. 203–211, 1998.
[2] M. Bech, X-ray Imaging with a Grating Interferometer. PhD thesis, University of
Copenhagen, 2009.
[3] I. Glatt and O. Kafri, “Moire deflectometry-ray tracing lnterferometry,” Optics
and Lasers in Engineering, pp. 277–320, 1988.
[4] O. Sasaki and T. Kobayashi, “Beam-deflection optical tomography of the
refractive-index distribution based on the Rytov approximation,” Applied Optics,
vol. 32, no. 5, pp. 746–751, 1993.
[5] G. W. Faris and R. L. Byer, “Beam-deflection optical tomography,” Optics Letters,
vol. 12, no. 2, pp. 72–74, 1987.
[6] William and Teukolsky, Numerical Recipes in C, The art of scientific computing.
Cambridge University Press, 2002.
[7] M. S. Avinash C. Kak, Principles of Computerized Tomographic Imaging. 1987.
[8] E. J. Hall and D. J. Brenner, “Cancer risks from diagnostic radiology,” Proceedings
of the 3rd IEEE International Conference on Biometrics: Theory, Applications
and Systems, pp. 362–378, 2008.

REFERENCES 72
[9] S. Wold, L. Eriksson, and N. Kettaneh, “Phase contrast x-ray imaging,” Int. J.
Nanotechnology, vol. 3, no. 2/3, pp. 280–297, 2006.
[10] S. Matsuo, T. Katafuchi, K. Tohyama, J. Morishita, K. Yamada, and H. Fujita,
“Evaluation of edge effect due to phase contrast imaging for mammography,”
Medical Physics, vol. 32, pp. 2690–2697, 2005.
[11] B. Zoofan and J. Y. Kim, “Phase-contrast x-ray imaging for nondestructive eval-
uation of materials,” Journal of Applied Physics, vol. 100, 2006.
[12] A. W. Stevenson and S. W. Wilkins, “Phasecontrast imaging of weakly absorbing
materials using hard x-rays,” Nature, vol. 373, pp. 595–598, 1995.
[13] Week 3 b Chapter 12. X-ray interaction with matter.
[14] F. Jian, “Phase contrast computed tomography,” Computed Tomography: Clinical
Applications, pp. 108–112.
[15] S. W. Wilkins and A. W. Stevenson, “Phase contrast imaging using polychromatic
hard x-rays,” Nature, vol. 384, pp. 335–338, 1996.
[16] Y. I. Nesterets and S. W. Wilkins, “Phase-contrast imaging using a scanning-
doublegrating configuration,” Optics Express, vol. 16, no. 8, pp. 5849–5867, 2008.
[17] B. Z. Yang Song and A. He, “Algebraic iterative algorithm for deflection tomogra-
phy and its application to density flow fields in a hypersonic wind tunnel,” Applied
Optics, vol. 45, no. 31, pp. 8092–8102, 2006.
[18] Z. Karny and O. Kafri, “Refractive-index measurements by moire deflectometry,”
Applied Optics, vol. 21, no. 18, pp. 3326–3329, 1982.
[19] A. Ishimaru, Wave Propagation and Scattering in Random Media. New York, NY:
Academic Press, 1978.

REFERENCES 73
[20] C. M. Vest, “Tomography for properties of materials that bend rays: a tutorial,”
Applied Optics, vol. 24, no. 23, pp. 4089–4095, 1985.
[21] P. C. Hansen, “Regularization tools: A matlab package for analysis and solution
of discrete ill-posed problems,” www.mathworks.com/matlabcentral/fileexchange,
2008.
[22] I. F. Gorodnitsky and B. D. Rao, “Analysis of error produced by truncated svd
and tikhonov regularization methods,” Conference Record of the Twenty-Eighth
Asilomar Conference, pp. 1058–639, 1995.
[23] T. Ishigure and M. Satoh, “Formation of the refractive index profile in the graded
index polymer optical fiber for gigabit data transmission,” Journal of lightwave
Technology, vol. 15, no. 11, pp. 2095–2100, November, 1997.
[24] M. Schweiger and S. R. Arridge, “Image reconstruction in optical tomography
using local basis functions,” Journal of Electronic Imaging, vol. 12, no. 4, pp. 583–
593, October, 2003.
[25] M. Born and E. Wolf, Principles of Optics: Electromagnetic Theory of Propaga-
tion, Interference and Diffraction of Light. Cambridge University Press, 1999.
[26] B. Denis and Gimenez, “Ultrasonic transmission tomography in refracting media:
Reduction of refraction artifacts by curved-ray techniques,” IEEE Transactions
on Medical Imaging, vol. 14, no. 1, pp. 173–189, 1995.