Embed Size (px)
Citation preview

A Blueprint for Command and Control: Automation and Interface
Jason Scholz, Dale Lambert, Don Gossink, Glen Smith C3I Division
Defence Science and Technology Organisation Edinburgh, Australia
Abstract— Traditionally the domain of humans, Command and Control (C2) increasingly necessitates the use of automated decision aids and automated decision makers to assist in managing the complexity and dynamics of modern military operations. We propose a blueprint based on the US Joint Directors of Laboratories (JDL) model, cognitive psychology and agent research literature. This blueprint provides design guidance for fusion, resource management and automation policy through decomposition into levels and processes with commensurate levels of human-interface, and the development of foundational language.
Keywords-architecture; agents; psychology; interface
I. INTRODUCTION The development of an information fusion system to solve
problems relies on the intent of that system (policy) and the ability to management resources to achieve that intent. In C2, fusion, resource management and policy may be considered as equal peers. This is the third in a three part series to express a blueprint for the development of machine-based C2. The first covers resource management, the second policy management and the third a complete architecture, noting that a blueprint for higher level fusion has already been proposed [1] though not yet integrated into a holistic form as presented here.
A. Motivation A future vision for “Ubiquitous Command and Control” [2]
was offered in 1999 and later [3,4] for “a similar and significant C2 capability on every platform” to provide “extreme robustness.” To realise this vision, automation is required. Automated decision aids and automated decision makers must also integrate with human decision making. In addition to filling conventional roles of “dull and dangerous” tasks, automation provides further potential,
• Ability to dynamically adapt the C2 system according to required scale, composition and robustness as a result of change. Software agents are a potential means to this [5,6] applied to date mostly in commercial areas. Agents span a range [7] from simple reactive automata through to programs with intentions e.g. [8]. The latter adapt plans to meet goals as situations change. More recent research extends this with the ability to adapt goals if no adequate plan is found [9].
• Ability to balance cognitive load. “Network Centric Warfare” [10] (Alberts et al, 1999) raised to military consciousness the power of networks but neglected
automation. Later the U.S. [11] recognised the flaw stating that “an unintended consequence” is that “everybody must think”! The increased cognitive load on individuals introduced by networking may in part be addressed by automation.
• Ability for ethical decision making. A report [12] on mental health issues during Operation Iraqi Freedom provides some stirring facts indicating human performance in making ethical decisions can be less than ideal. Automation does not suffer fatigue, low morale, sleep deprivation, etc that might cloud human judgement. Ethical hazards may apply even to the search for information e.g. being unaware of information available somewhere “in the system” can have strategic implications.
In this paper we specifically address the Automation and Interface aspects of a C2 blueprint. This excludes protocols for communication between people and machines and between machines at this time, noting that [13] proposes a comprehensive legal agreement protocol to address this. Our motivation is to establish a common language and conceptualization for design of fusion and C2 systems.
B. Approach Command and Control is defined in [3,4], We assert that command involves the creative expression of intent to another. Complementing this we assert, control involves the expression of a capability (a plan is an example of a capability) to another and the monitoring and correction of the execution of that capability. Lambert… in effect suggests that we can understand action as the utilisation of capability to achieve intent, given awareness.
This is broader than the traditional Western military
definition based on authority. Further, by “capability” we mean “something that changes ones awareness of the world (usually) by changing the world” [3].
Figure 1 illustrates the three key components of C2: intent, capability and awareness. Our philosophical basis is to consider that action exists as each of the three, yet is unified as one – a kind of action trinity. Together they form a non-well-founded set – meaning a set that contains itself as a member1. This gives rise to the recursions observed in C2 and provides a fundamental insight into C2 processes. The trinity may be
1 Non-well founded sets negate the foundation axiom of Zermelo-Fraenkel set theory.
211

reformed into duals. For example, collapsing intent into capability (i.e. intent in planning) creates attent in awareness.
Action
CapabilityIntent
Awareness
Intent in Capability(e.g. in a plan)
Attent in Awareness
Capability
Awareness
Action
Figure 1. Action as a trinity from [3] (left), and Action as a non-well
founded dualism (right).
The data fusion community’s Joint Directors of Laboratories (JDL) model for data fusion outlines the automation of awareness, see for example [14]. The JDL model was extended to include resource management (as a dual to fusion) and aligning it to automation of capability, though constrained to the management of sensors and sensor processing, rather than more general effectors as is required for C2.
The JDL model has remained silent on the question of centralised versus distributed processing. Multi-agent systems (MAS) may provide a scalable architectural basis for distributed automation in C2 systems. In a general MAS model, cognitive human and machine individuals are members of a society of information processors, each with their unique strengths and weaknesses. By possessing human-understandable cognitive constructs (such as beliefs, roles, desires and intentions) and social protocols, software agents have the potential for more naturalistic interaction, thereby freeing Commanders from the burden (and stigma) of operating a computer in the current sense. This leads to a vision whereby interaction with a cognitive software agent is more like interacting with a human, allowing verbal commands to be expressed and understood as per [1].
In the next sections, we present the C2 Challenge, outline fusion, resource management, policy and human-interaction architectures and summarise a total C2 automation and interaction blueprint.
C. C2 Challenge We generalise the elucidation in [1] on the requirements for
higher-level fusion systems to C2. Figure 2 illustrates. C2 may be interpreted firstly in terms of its human component, often cited as military “art”, it is concerned with psychology and in particular those aspects peculiar to Commanders engaged in war. Der Kriegerische Genius (“On Military Genius”) [15] typically illustrates this component. A machine interpretation of C2, even in more modern times however, is limited mostly to low-level fusion for object assessments especially detection and tracking (awareness); aids for detailed schedule management, critical path analysis and the routing of assets (capability); and low-level programmed ends (intent) for automated control of self-defence systems (e.g. Phalanx). The interpretation of C2 as integration is more ubiquitous. Almost every modern Western military C2 headquarters has a “dots on
maps” display as the “Common Operating Picture” (COP) and use telephones, email, Microsoft Powerpoint® and so on for what we term “Planning and Operating Controls” (POC), yet the degree to which integration of what is in a person’s head corresponds to what these interfaces provide is questionable.
The C2 Challenge subsumes the higher-level fusion challenge of [1]. The C2 Challenge is illustrated in the progression of figure 2 where all areas of the matrix might be addressed, shown as converting the areas from light to dark.
PI
POC
COP
CommandIntent
Planning&
Execution
SituationAwareness
Mac
hine
s
Inte
grat
ion
Hum
an
Intent
Capability
Awareness
MachineC2
InterfaceC2
Psychology of C2
Interpretation
Views onAction
COP = Common Operating PicturePOC = Planning & Operating ControlsPI = Policy Interface
Policy
ResourceMgmt
Fusion
PI
POC
COP
CommandIntent
Planning&
Execution
SituationAwareness
Mac
hine
s
Inte
grat
ion
Hum
an
Intent
Capability
Awareness
MachineC2
InterfaceC2
Psychology of C2
Interpretation
Views onAction
Policy
ResourceMgmt
Fusion
PI
POC
COP
CommandIntent
Planning&
Execution
SituationAwareness
Mac
hine
s
Inte
grat
ion
Hum
an
Intent
Capability
Awareness
MachineC2
InterfaceC2
Psychology of C2
Interpretation
Views onAction
Policy
ResourceMgmt
Fusion
Figure 2. A progression of C2 development.
II. FUSION ARCHITECTURE Data fusion is defined in [16] by, The process of utilising one or more data sources over time to assemble a representation of aspects of interest in an environment. The Joint Directors of Laboratories (JDL) model is a key
conceptual framework for Information Fusion. It was initiated in the 1980’s, as indicated in the lexicon of [17], and has subsequently been revised over the years [14,18,1]. The latter [1] outlines a blueprint for higher-level fusion systems. Following [18], [1] deconstructs the JDL model levels. The deconstruction celebrates differences in fusion levels that parallel human situations awareness. Most recently in [19], Lambert adds ‘Sensation’ to Endsley’s account of situation awareness [19 and section V.B],
Situation awareness is the perception of the elements in the environment within a volume of time and space, the comprehension of their meaning, and the projection of their status in the near future.
to provide the following parallel for human – machine fusion levels:
• Level 0: Sensation - Observable Assessment;
• Level 1: Perception - Object Assessment,
• Level 2: Comprehension - Situation Assessment; and
• Level 3: Projection - Scenario Assessment.
Lambert’s process philosophy view absorbs JDL Level 4 Process Refinement into each of the aforementioned levels. Machine fusion is situation awareness performed by machines. Human situation awareness is fusion performed by people.
212

In reconstructing machine fusion in [1] to celebrate
uniformities across the fusion levels, Lambert presents the State Transition Data Fusion (STDF) model. In this model, information fusion involves the prediction, observation and explanation of state transitions in the world. A critical architectural aspect of STDF is the conjecture that the same basic process applies at each of the fusion levels. In [19] Lambert discusses this in relation to higher level fusion processing and lower level signal, textual and image fusion processing. The general STDF model is shown in figure 3 and quoted from [19].
Agent
Prediction
Observation
Explanation
Sensors
transitionstate si(k+1)
k+1 time
state si(k)
k
World
external
interactions
ej(k+1)
association
oi(k+1|k)^
initiation
oj(k+1)matches oi(k+1|k)^
si(k+1|k+1)^
si(k+1|k)^
Rep
rese
ntat
ion
si(k|k)^
insert information
transfer process
invoke process
access information
oj(k+1)unmatched
updatefailure
updatesuccess
oi(k+1|k)unmatched
^
si(k+1|k+1)^ sr(k+1|k+1)^
registration detection
stateprediction
observationprediction
dj(k+1)oj(k+1)
Figure 3. The generic STDF model from [19].
• At time step k+1 the agent senses a number of new states in the world {si(k+1) | i ∈ N+(p1)} through its sensors and transfers the corresponding sensations {ej(k+1) | j ∈ N+(q)} to an observation process.
• The observation process involves a detection process to potentially identify a detection dj(k+1) from each sense datum ej(k+1); a registration process that yields an observation oj(k+1) by normalizing the detection dj(k+1) relative to a frame of reference; and then an association process.
• The association process first draws upon a prediction process, which:
accesses previous representations si(k|k) of states si(k) in the world at
time k; applies a state prediction process to representation si(k|k) to posit
a predicted state representation(s) si(k+1|k) of predicted state si(k+1) in
the world at time step k+1; and then applies an observation prediction
process to predicted state representation si(k+1|k) to posit predicted
observation(s) o i(k+1|k) at time step k+1. Where multi-hypothesis state
and observation predictions occur for state si(k+1) from si(k|k), these can
be labeled si,1(k+1|k), …, s
i,w(k+1|k) and oi,1(k+1|k) , …, o i,w(k+1|k)
respectively, for w ∈ N+.
• The association process then matches the observations {oj(k+1) | k ∈ Time_Step & j ∈ N+(q)} at time step k+1 to (one or more) predicted
observations { oi(k+1|k) | k ∈ Time_Step & i ∈ N+(p)} for time step k+1
and then transfers control to an explanation process.
• The explanation process must contend with three possible outcomes from the comparison of observations {oj(k+1) | k ∈ Time_Step & j ∈ N+(q)} at
time step k+1 with the predicted observations { oi(k+1|k) | k ∈
Time_Step & i ∈ N+(p)} for time step k+1.
o If the observation oj(k+1) successfully matches with a
predicted observation oi(k+1|k), then an update success
process is invoked to produce the explained representation s
i(k+1|k+1) of state si(k+1) at time step k+1.
o If predicted observation oi(k+1|k) fails to match with any
observation oj(k+1), then an update failure process is invoked
to produce the explained representation si(k+1|k+1) for state
si(k+1) at time step k+1.
o If the observation oj(k+1) fails to match with any predicted
observation o i(k+1|k), then an initiation process is invoked to
produce the explained representation sr(k+1|k+1) for new
state sr(k+1) at time step k+1.
Table I shows the application of these processes at each level in a signal processing context. Again, [19] discusses the details.
TABLE I. SUMMARY OF STDF PROCESSES AT LEVELS 1-3.
Fusion Level 0 1 2 3
ObservableAssessment
Object Assessment
SituationAssessment
ScenarioAssessment
Obs
erva
tion Detection Signal
Recognition Signal
Processing Object
Assessment Object
Assessment
Registration Signal Registration
Coordinate Registration
Semantic Registration
Situation Assessment
Association Signal Association
Data Association
Proposition Association
Situation Association
Pred
ictio
n State Prediction
Feature Prediction
State Vector Prediction
Scenario Assessment
Predictive Assessment
Observation Prediction
Signal Prediction
Measurement Prediction
Expectation Prediction
COA Assessment
Exp
lana
tion Initiation Feature
Initiation State Vector
Initiation Situation Initiation
Scenario Initiation
Update Success
Feature Update
State Vector Update
Situation Update
Scenario Update
Update Failure
Feature Detection
State Vector Deletion
Situation Deletion
Scenario Termination
III. RESOURCE MANAGEMENT ARCHITECTURE As outlined in [20], an architecture for resource
management (RM) may be formed with levels that are “duals” of the levels in the fusion architecture, yielding level 3: Course of Effect (scenario), level 2: Course of Action (situation), level 1: Effect Objects, and level 0: Effect Controllables, underpinned by Effectors.
Noting that controllability (of certain variables) is the dual of observability and is a requisite to effect the world as intended.
A resource management (RM) process model dual to the STDF model for fusion is similarly expressible [20]. The process stages of Resource Generation/Identification, Resource Evaluation and Resource Selection are an abstraction
Fusion is the sensation of observables in the environment, the perception of objects formed from observables across volumes of time and space, the comprehension of situations involving these objects, and the projection of scenarios into the future.
213
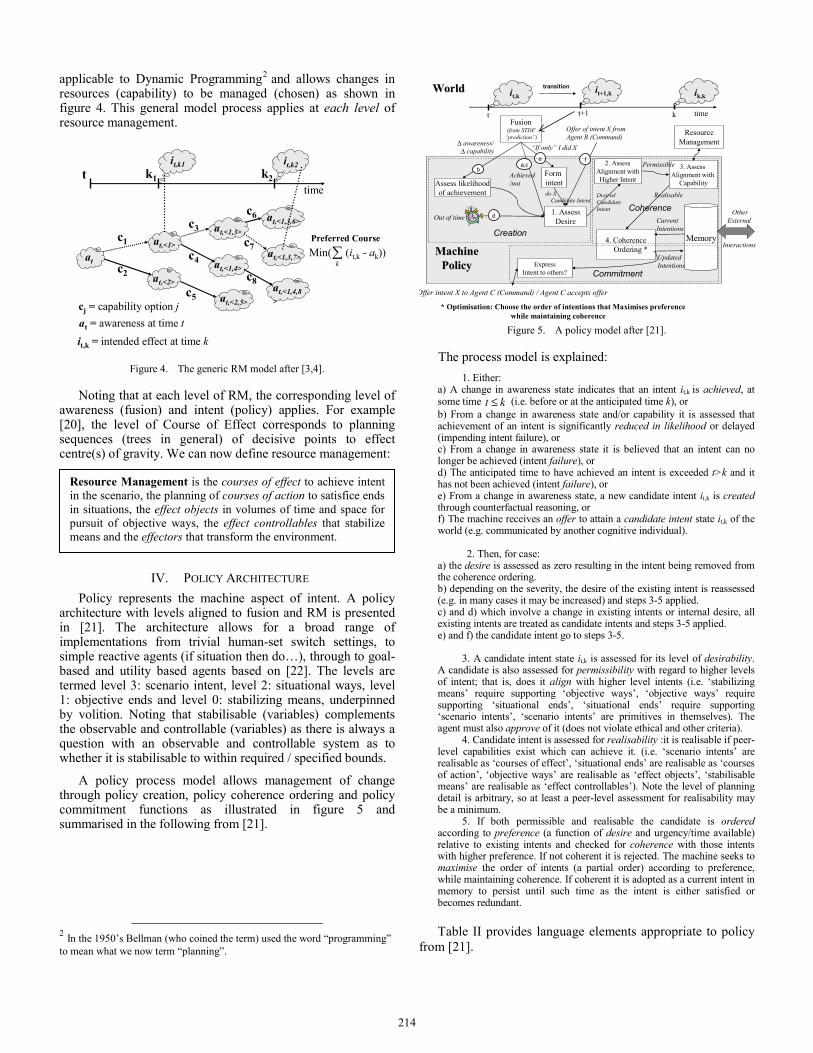
applicable to Dynamic Programming2 and allows changes in resources (capability) to be managed (chosen) as shown in figure 4. This general model process applies at each level of resource management.
at
at,<1>
at,<2>
c1
c2
at,<1,3>
at,<1,4>
at,<2,5>
c3
c4
c5
at,<1,3,6>
at,<1,3,7>
at,<1,4,8>
c6
c7
c8
it,k1 it,k2t k1 k2
cj = capability option jat = awareness at time tit,k = intended effect at time k
time
Preferred CourseMin( (it,k - ak))∑
k
Figure 4. The generic RM model after [3,4].
Noting that at each level of RM, the corresponding level of awareness (fusion) and intent (policy) applies. For example [20], the level of Course of Effect corresponds to planning sequences (trees in general) of decisive points to effect centre(s) of gravity. We can now define resource management:
IV. POLICY ARCHITECTURE Policy represents the machine aspect of intent. A policy
architecture with levels aligned to fusion and RM is presented in [21]. The architecture allows for a broad range of implementations from trivial human-set switch settings, to simple reactive agents (if situation then do…), through to goal-based and utility based agents based on [22]. The levels are termed level 3: scenario intent, level 2: situational ways, level 1: objective ends and level 0: stabilizing means, underpinned by volition. Noting that stabilisable (variables) complements the observable and controllable (variables) as there is always a question with an observable and controllable system as to whether it is stabilisable to within required / specified bounds.
A policy process model allows management of change through policy creation, policy coherence ordering and policy commitment functions as illustrated in figure 5 and summarised in the following from [21].
2 In the 1950’s Bellman (who coined the term) used the word “programming” to mean what we now term “planning”.
Fusion(from STDF
“prediction”)
3. Assess Alignment with
Capability
DesiredCandidateIntent
4. CoherenceOrdering *
2. Assess Alignment with Higher Intent
Realisable
Memory
Current Intentions
Updated Intentions
transitionit,k
it+1,k
t t+1 time
Δ awareness/Δ capability
OtherExternal
Interactions
* Optimisation: Choose the order of intentions that Maximises preference while maintaining coherence
WorldWorld
MachineMachinePolicyPolicy
k
ik,k
Achieved/not
b
Assess likelihoodof achievement
dOut of time
“If only” I did Xe
Offer of intent X from Agent B (Command)
f
Form intentdo X
1. AssessDesire
Candidate Intent
Resource Management
Permissible
ExpressIntent to others?
Offer intent X to Agent C (Command) / Agent C accepts offer
a,c
Commitment
Creation
Coherence
Figure 5. A policy model after [21].
The process model is explained: 1. Either:
a) A change in awareness state indicates that an intent it,k is achieved, at some time kt ≤ (i.e. before or at the anticipated time k), or b) From a change in awareness state and/or capability it is assessed that achievement of an intent is significantly reduced in likelihood or delayed (impending intent failure), or c) From a change in awareness state it is believed that an intent can no longer be achieved (intent failure), or d) The anticipated time to have achieved an intent is exceeded t>k and it has not been achieved (intent failure), or e) From a change in awareness state, a new candidate intent it,k is created through counterfactual reasoning, or f) The machine receives an offer to attain a candidate intent state it,k of the world (e.g. communicated by another cognitive individual). 2. Then, for case: a) the desire is assessed as zero resulting in the intent being removed from the coherence ordering. b) depending on the severity, the desire of the existing intent is reassessed (e.g. in many cases it may be increased) and steps 3-5 applied. c) and d) which involve a change in existing intents or internal desire, all existing intents are treated as candidate intents and steps 3-5 applied. e) and f) the candidate intent go to steps 3-5.
3. A candidate intent state it,k is assessed for its level of desirability.
A candidate is also assessed for permissibility with regard to higher levels of intent; that is, does it align with higher level intents (i.e. ‘stabilizing means’ require supporting ‘objective ways’, ‘objective ways’ require supporting ‘situational ends’, ‘situational ends’ require supporting ‘scenario intents’, ‘scenario intents’ are primitives in themselves). The agent must also approve of it (does not violate ethical and other criteria).
4. Candidate intent is assessed for realisability :it is realisable if peer-level capabilities exist which can achieve it. (i.e. ‘scenario intents’ are realisable as ‘courses of effect’, ‘situational ends’ are realisable as ‘courses of action’, ‘objective ways’ are realisable as ‘effect objects’, ‘stabilisable means’ are realisable as ‘effect controllables’). Note the level of planning detail is arbitrary, so at least a peer-level assessment for realisability may be a minimum.
5. If both permissible and realisable the candidate is ordered according to preference (a function of desire and urgency/time available) relative to existing intents and checked for coherence with those intents with higher preference. If not coherent it is rejected. The machine seeks to maximise the order of intents (a partial order) according to preference, while maintaining coherence. If coherent it is adopted as a current intent in memory to persist until such time as the intent is either satisfied or becomes redundant.
Table II provides language elements appropriate to policy
from [21].
Resource Management is the courses of effect to achieve intent in the scenario, the planning of courses of action to satisfice ends in situations, the effect objects in volumes of time and space for pursuit of objective ways, the effect controllables that stabilize means and the effectors that transform the environment.
214

TABLE II. POLICY LANGUAGE ELEMENTS.
Level Semantics Social Deny, Possess, Own (relate to Possession & Ownership);
Group (identifies in-group and out-group members); Offers, Agrees, Conflicts (relate to Agreement); Ally, Enemy, Neutral (relate to Alliance); Responsible, Authority, Competency, Commands, Controls (relate to C2).
Cognitive Deceive, Exploit, Believes, Expects (relate to Awareness); Performs, Succeeds, Fails, Achieves, Approves (or Permits/Permissible), Prefers (relate to Cognitive Routines); Defeat, Intends, Desires (relates to Volition); Cognitive (individual).
Functional Degrade, Destroy, Disrupt, Neutralise, Suppress, Operational, Operating (relate to Operational Status). Sense, Move, Strike, Inform, Attach, Expr (relate to Operation).
Physical Divert, Interdict. Metaphysical Delay (relates to time).
We can now define policy:
V. PSYCHOLOGY AND INTERFACE Human psychology and human-machine interface levels
need to correspond to machine levels in policy, fusion and resource management as was shown in figure 2. We define them as follows.
A. Human Intentions We base a definition of the psychology of intent on the
language of the US Army doctrine [23]:
Intent is the will that drives action, the tasks to be performed immediately, the missions directly attained through constant pursuit, the end states selected to guide those pursuits and the purposes that give orientation to those selections.
B. Human Awareness We use Endsley’s [24] definition of situation awareness to
refer to the human psychology aspect of awareness (our emphases),
Situation awareness is the perception of the elements in the environment within a volume of time and space, the comprehension of their meaning, and the projection of their status in the near future.
C. Human Capabilities We use military planning language [25] as a basis for a
definition:
Capability is the mission analysis; the development, analysis and decision on a course of action, the assignment of objects in volumes of time and space, and the activation of effectors.
D. Interfaces The Common Operating Picture (COP) focus is on
presentation (outputs):
• COP 3 – Show scenario assessments. e.g. Interpretative story about the scenario, or ‘stories about scenarios’.
• COP 2 – Show situation assessments. e.g. Reports about the situation, or ‘stories about situations’.
• COP 1 – Show object assessments. Presents tracks, or ‘lines on maps’.
• COP 0 – Show observables assessments. e.g. ‘dots on maps’ and signal data.
Planning and Operating Controls (POC) focus is on controls (inputs):
• POC 3 – Control Courses of Effect for scenarios. e.g. Select decisive points to achieve effect on centres of gravity.
• POC 2 – Control Courses of Action for situations. e.g. Interactive option graphs.
• POC 1 – Control Effect Objects. Assign objects in volumes of time and space. e.g. interactive scheduling and path routing.
• POC 0 – Manage Effect Controllables. e.g. The activation, deactivation and intensity control settings.
Policy Interface (PI) focus is on interaction. Noting that the intent state of a machine (unlike human intent) is fully accessible for presentation and control by humans.
• PI 3 – Show scenario intent and assign purpose. e.g. Use of recognised semantic concepts via keyboard and voice recognition, registration and checking (feedback) to ensure correct machine interpretation.
• PI 2 – Show situation ways and set end states. e.g. Virtual trees depicting hierarchies of goals.
• PI 1 – Show objective ends and set missions. e.g. hand gesture recognition to communicate directions and paths.
• PI 0 – Show stabilizing means and set tasks. e.g. machine tracking eye gaze to gauge viewer attent (with implication of low level intent) and the interpretation of gestures for pointing at objects. This makes use of intentional cues not under executive control.
VI. OVERALL C2 ARCHITECTURE Figure 6 summarises the machine levels in the architecture.
Policy is the scenario intent that provides purpose, for situational ends as selected goals, to guide objective ways that are immediately and directly attained through constant pursuit, to achieve stabilizing means through acts of volition on the environment.
215

Course of effect scenario
Course of action situation
Effect Objects
Effect Controllables
R2
R1
R0
Effectors
R3
E
F2
F1
F0
F3
S
ScenarioAssessment
SituationAssessment
ObjectAssessment
ObservablesAssessment
Sensors
P3
P2
P1
ScenarioIntent
SituationalEnds
ObjectiveWays
VVolitions
Fusion Policy Resource Management
P0StabilisingMeans
Figure 6. Levels of fusion, policy and resource management for machines.
The interdependence between intent, capability and awareness expressed in the introduction is manifest between fusion, resource management and policy levels, as indicated by the horizontal ‘bus’ lines in figure 6. Further, communication of all levels is necessary to deliver information from a particular form of action. e.g. for a human to attain a complete understanding of the machine’s awareness requires all of levels 0, 1, 2, and 3 be communicated to the COP interface.
Figure 7 illustrates an overall architecture for machine C2 and human-machine interface. In the centre, the human commander interacts with the machine via a Common Operating Picture (COP) for awareness, Planning and Operating Controls (POC) for capability and a Policy Interface (PI) for intent. Four level models of fusion, policy and resource management are shown. Each level fusion, policy and RM each have a specific form of process, as outlined. We further advocate a structure with a hub at each level 2 indicating unified comprehension (fusion), unified goals (policy), and unified course of action (resource management). Although primary information flows are illustrated as trees, links between processing elements and across levels occurs as required depending on the problem (e.g. in the cross cueing of sensors), thus the communication backbone might be generalized as a grid structure.
VII. CONCLUSION We have offered a blueprint for C2 automation and human
integration which builds largely from the JDL architecture of the fusion community, agent research and psychology. The blueprint provides a set of guiding principles, proposes levels which reduce system complexity for design, and illustrative processes to manage change in intent, capability and awareness.
REFERENCES [1] D.A. Lambert, “A blueprint for higher level fusion systems,”
Information Fusion, Vol. 10, pp. 6-24, 2009.
[2] D.A. Lambert, D.A, “Ubiquitous command and control,” Proceedings IEEE Information, Decision and Control Conference, Feb., Adelaide Australia, pp. 35-40, 1999.
[3] D.A. Lambert and J.B. Scholz, “A dialectic for network centric warfare,” 10th International Command and Control Research and Technology Symposium (ICCRTS), 2005.
[4] D.A. Lambert and J.B. Scholz, “Ubiquitous command and control,” Journal of Intelligent Decision Technologies, Vol. 1, pp. 157-173, IOS Press, 2007.
[5] D. Weyns and M.P. Georgeff, "Self-adaptation using multiagent systems", presented at IEEE Software, 2010, pp. 86-91.
[6] F.M.T. Brazier, J.O. Kephart, H. Van Dyke Parunak, M.N. Huhns, M.N. “Agents and service-oriented computing for autonomic computing – a research agenda”, IEEE Journal of Internet Computing, Vol. 13 Issue 3, May 2009.
[7] S.J. Russell and P. Norvig, Artificial Intelligence: A Modern Approach. Second Ed. Prentice-Hall , 2003.
[8] M.E. Bratman, Intention, Plans, and Practical Reasoning. Harvard University, Cambridge, MA, 1987.
[9] J. Bell and Z. Huang, “Dynamic goal hierarchies”, In Proc. PRICAI’96 Workshop on Intelligent Agent Systems, Springer-Verlag, 1997.
[10] D.H. Alberts, J.J. Gartska, F.P. Stein, Network Centric Warfare – Developing and Leveraging Information Superiority, CCRP Publication, US DoD, 1999.
[11] Defense Science Board, Chatham, R., Braddock, J., “Defense science board task force on training for future conflicts”, Washington, D.C., June 2003. http://handle.dtic.mil/100.2/ADA429010
[12] Surgeon General (2006), Final Report, Mental Health Advisory Team (MHAT) IV Operation Iraqi Freedom 05-07, 17 Nov 2006, p.42. Office of the Surgeon General Multi-National Force Iraq.
[13] D. A. Lambert and A. G. Lambert, “The legal agreement protocol”, in: E. Blasch, E. Bossé and D. A. Lambert (Eds.), “High Level Information Fusion Management and Systems Design”, Ch. 8, Artech House, Norwood MA, 2012.
[14] A.N. Steinberg, C.L. Bowman, and F.E. White, “Revisions to the JDL data fusion model” in Sensor Fusion: Architectures, Algorithms, and Applications, Proc. of SPIE, Vol. 3719, p.430, 1999.
[15] Von Clausewitz, On War, 1832, Translated by M. Howard and P. Paret. Princeton Uni., 1989.
[16] D.A. Lambert, “Situations for situation awareness”, in Proc. Fourth Int. Conf. on Data Fusion, Montreal, Canada, 2001.
[17] F.E. White, “Data fusion lexicon”, Data Fusion Panel, JDL Technical Panel Report, Naval Ocean Systems Center, San Diego, 1987.
[18] A.N. Steinberg, C.L. Bowman, “Rethinking the JDL data fusion levels” MSS National Symposium on Sensor and Data Fusion, Columbia, SC, USA, 2004.
[19] D. A. Lambert, “The state transition data fusion model”, in: E. Blasch, E. Bossé and D. A. Lambert (Eds.), “High level information fusion management and systems design”, Ch. 3, Artech House, Norwood MA, 2012.
[20] J.B. Scholz, D.E. Gossink, “A resource management blueprint for fusion and command and control,” Fusion 2012 companion paper.
[21] J.B. Scholz, G. Smith, D.E. Gossink, “A automation policy blueprint for fusion and command and control,” Fusion 2012 companion paper.
[22] Q. Smith, “Four Teleological Orders of Human Action,” Published in: Philosophical Topics, Vol. 12, No. 3, Winter, pp. 312-335, 1981.
[23] US Army, Field Manual FM-05. p. E-11, 26 March 2010. [24] M.R. Endsley, "Toward a theory of situation awareness in dynamic
systems", Human Factors, Vol. 37, No. 1 pp. 32–64, 1995. [25] L. Zhang, L. Falzon, M. Davies, and I. Fuss, “On relationships between
key concepts of operational level planning”, 5th ICCRTS, Canberra, ACT, 2000.
216

Rn
Pol
icy
Inte
rface
leve
ls 0
to 3
.P
I 0-3
Cap
abili
ty le
vels
with
dire
ct c
orre
spon
denc
e to
P
OC
leve
ls.
C0-
C3
Pol
icy
leve
l ‘n’
. i.e
. P0,
P1,
P2,
P3.
P
n
Plan
ning
& O
pera
ting
Con
trols
leve
ls 0
to 3
.P
OC
0-3
Inte
nt le
vels
with
dire
ct c
orre
spon
denc
e to
PI
leve
ls.
I0-I3
Awar
enes
s le
vels
with
dire
ct c
orre
spon
denc
e to
C
OP
/ Jo
int D
irect
ors
of L
abor
ator
ies
(JD
L m
odel
) lev
els.
A0-
A3
Com
mon
Ope
ratin
g Pi
ctur
e le
vels
0 to
3.
CO
P 0
-3
Res
ourc
e M
anag
emen
t lev
el ‘n
’i.e
. R0,
R1,
R2,
R
3. (R
2 ex
ampl
e sh
own
in d
iagr
am).
Rn
Fusi
on le
vel ‘
n’i.e
. F0,
F1,
F2,
F3.
Cor
resp
onds
to
JD
L m
odel
leve
ls. S
ame
proc
ess
stru
ctur
e at
al
l lev
els,
but
diff
eren
t rep
rese
ntat
ion
leve
l.
FnG
loss
ary
Cou
rse
of
effe
ct s
cena
rio
Cou
rse
of
actio
n si
tuat
ion
Effect Objects
Cyb
er E
ffect
ors
Cybe
r Effe
ctor
s
Effect Controllables
Rad
ar C
ontr
olle
rsR
adar
Con
trol
lers
Surv
eilla
nce
cont
rol
EA
, EP
, ES
Net
wor
k Po
stur
eA
djus
tmen
t
Jam
mer
sJa
mm
ers
Wea
pons
Wea
pons
Plat
form
sPl
atfo
rms
Con
vent
iona
lSt
rike
Man
oeuv
re
Dec
ide
Act
Logi
stic
sLo
gist
ics
Supp
ly
effectors
Imag
e Im
age
Sens
ors
Sens
ors
Text
Te
xt
Sens
ors
Sens
ors
Cyb
er
Cyb
er
Sens
ors
Sens
ors
CO
MIN
T C
OM
INT
Sens
ors
Sens
ors
ELIN
T EL
INT
Sens
ors
Sens
ors
Rad
ar
Rad
ar
Sens
ors
Sens
ors
EL
INT
CO
MIN
TH
UM
INT
/O
SIN
TC
ompu
ter
Net
wor
k D
efen
ceIM
INT
Surv
eilla
nce
ObservableAssessment
Object Assessment
Situ
atio
n A
sses
smen
t
Sce
nario
A
sses
smen
t
sensors
Obs
erve
Orie
ntF2
Fusi
on
Blu
e F
orce
Own
O
wn
Forc
eFo
rce
Sens
ors
Sens
ors
R3
F3
A0.
Sen
satio
n
C1.
Ass
ignm
ent
Sens
or
Ψ
Psyc
holo
gy
CO
P2
CO
P1
CO
P0
CO
PScenario Intent
Polic
y
SituationalEnds
ObjectiveWays
PI0
PI1
PI2
PI3
PI
P2
CO
P3
Inte
nd
Machine
Machine
Interaction
Human
POC
2
POC
1
POC
0
POC
3
POC
C0.
Act
ivat
ion
A1.
Per
cept
ion
A2.
C
ompr
ehen
sion
C2.
Cou
rse
ofac
tion
C3.
Mis
sion
Anal
ysis
I1. M
issi
ons
I0. T
asks
F1F1
F1F1
F1F1
F1
F0F0
F0F0
F0F0
F0
Interaction
Interaction
Fn
R2
R1
R0
R1
R0
R1
R0
R1
R0
R1 R0
R1
R0
Pn
StabilisingMeans
P3
Com
mun
icat
ion
betw
een
all l
evel
sWill
Volitions
Func
tiona
l Vol
ition
sFu
nctio
nal V
oliti
ons
(dis
rupt
, deg
rade
, des
troy,
neut
ralis
e, o
pera
te,…
)
Phys
ical
& M
eta
Phys
ical
& M
eta --
phys
ical
phys
ical
Volit
ions
Vo
litio
ns
(div
ert,
inte
rdic
t, d
elay
, ,…
)
Cog
nitiv
eC
ogni
tive
Volit
ions
Vo
litio
ns
(dec
eive
, exp
loit,
def
eat,
achi
eve,
pre
fer,
perfo
rm,..
.)
Soci
al V
oliti
ons
Soci
al V
oliti
ons
(den
y, c
omm
and,
con
trol,
poss
ess,
agr
ee /
conf
lict,.
..)
P1
P1P1P1
P0P0P0P0
I3. P
urpo
se
A3.
Pr
ojec
tion
Effe
ctor
I2. E
nd
Stat
es
Communication between all levels
a ta t
,<1>
a t,<
2>
c 1 c 2
a t,<
1,3>
a t,<
1,4>
a t,<
2,5>
c 3 c 4 c 5
a t,<
1,3,
6>
a t,<
1,3,
7>
a t,<
1,4,
8>
c 6 c 7 c 8
i t,k1
i t,k2
tk 1
k 2
c j=
capa
bilit
y op
tion
ja t
= aw
aren
ess a
t tim
e t
i t,k
= in
tend
ed e
ffec
t at t
ime
k
time
Pref
erre
d C
ours
eM
in(
(i t
,k-a
k))∑ k
Communication between all levels
Res
ourc
e M
anag
emen
t
Fusi
on(fr
om S
TDF
“pre
dict
ion”
)
3. A
sses
s A
lignm
ent w
ith
Cap
abili
ty
Des
ired
Can
dida
teIn
tent
4. C
oher
ence
Ord
erin
g *
2. A
sses
s A
lignm
ent w
ith
Hig
her I
nten
t
Real
isab
le
Mem
ory
Cur
rent
In
tent
ions
Upd
ated
In
tent
ions
tran
sitio
ni t,k
i t+1,
k
tt+
1 tim
e
Δaw
aren
ess/
Δca
pabi
lity
Oth
erEx
tern
al
Inte
ract
ions
* O
ptim
isatio
n: C
hoos
e th
e or
der
of in
tent
ions
that
Max
imise
s pre
fere
nce
whi
le m
aint
aini
ng c
oher
ence
Wor
ldW
orld
Mac
hine
Mac
hine
Polic
yPo
licy
k
i k,k
Achi
eved
/not
b
Ass
ess l
ikel
ihoo
dof
ach
ieve
men
t
dO
ut o
f tim
e
“If o
nly”
I did
Xe
Offe
r of i
nten
t X fr
om
Agen
t B (C
omm
and)
f
Form
in
tent
do X 1.
Ass
ess
Des
ire
Can
dida
te In
tent
Reso
urce
M
anag
emen
t
Perm
issib
le
Expr
ess
Inte
nt to
oth
ers?
Offe
r int
ent X
to A
gent
C (C
omm
and)
/ Ag
ent C
acc
epts
offe
r
a,c
Com
mitm
ent
Cre
atio
n
Coh
eren
ce
Fi
gure
7. A
n O
vera
ll A
rchi
tect
ure
for C
2.
217