Embed Size (px)
Citation preview

94 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 1, FEBRUARY 2005
Adaptive Nonlinear Congestion Controller for aDifferentiated-Services Framework
Andreas Pitsillides, Member, IEEE, Petros Ioannou, Fellow, IEEE, Marios Lestas, Student Member, IEEE, andLoukas Rossides, Student Member, IEEE
Abstract—The growing demand of computer usage requires effi-cient ways of managing network traffic in order to avoid or at leastlimit the level of congestion in cases where increases in bandwidthare not desirable or possible. In this paper we developed and an-alyzed a generic Integrated Dynamic Congestion Control (IDCC)scheme for controlling traffic using information on the status ofeach queue in the network. The IDCC scheme is designed usingnonlinear control theory based on a nonlinear model of the net-work that is generated using fluid flow considerations. The method-ology used is general and independent of technology, as for ex-ample TCP/IP or ATM. We assume a differentiated-services net-work framework and formulate our control strategy in the samespirit as IP DiffServ for three types of services: Premium Service,Ordinary Service, and Best Effort Service. The three differentiatedclasses of traffic operate at each output port of a router/switch. AnIDCC scheme is designed for each output port, and a simple toimplement nonlinear controller, with proven performance, is de-signed and analyzed. Using analysis performance bounds are de-rived for provable controlled network behavior, as dictated by ref-erence values of the desired or acceptable length of the associatedqueues. By tightly controlling each output port, the overall networkperformance is also expected to be tightly controlled. The IDCCmethodology has been applied to an ATM network. We use OPNETsimulations to demonstrate that the proposed control methodologyachieves the desired behavior of the network, and possesses impor-tant attributes, as e.g., stable and robust behavior, high utilizationwith bounded delay and loss, together with good steady-state andtransient behavior.
Index Terms—ATM, congestion control, differentiated-servicesframework, Internet, nonlinear adaptive control theory.
I. INTRODUCTION
I T IS generally accepted that the problem of network con-gestion control remains a critical issue and a high priority,
especially given the growing size, demand, and speed (band-width) of the increasingly integrated services demanded fromfixed and mobile networks. Moreover, congestion may becomeunmanageable unless effective, robust, and efficient methods forcongestion control are developed. One could argue that networkcongestion is a problem unlikely to disappear in the near fu-ture; it is well-known that the optimal control of networks of
Manuscript received September 15, 2000; approved by IEEE/ACMTRANSACTIONS ON NETWORKING Editor L. Tassioulas. This work was sup-ported in part by the University of Cyprus and in part by the National ScienceFoundation under Grant Number ECS 9877193.
A. Pitsillides is with the Department of Computer Science, University ofCyprus, CY-1678 Nicosia, Cyprus (e-mail: [email protected]).
P. Ioannou and M. Lestas are with the Department of Electrical Engineering,University of Southern California, Los Angeles, CA 90007 USA (e-mail:[email protected]; [email protected]).
L. Rossides is with the Cyprus Telecommunications Authority, Nicosia,Cyprus (e-mail: [email protected]).
Digital Object Identifier 10.1109/TNET.2004.842238
queues is a notoriously difficult problem, even for simple cases[1]. This assertion is also supported by the fact that despite thevast research efforts, spanning a few decades, and large numberof different control schemes proposed, there are still no univer-sally acceptable congestion control solutions to address thesechallenges.
It is worth noting that a number of popular congestion controldesigns were developed using intuition, mostly resulting insimple nonlinear control schemes. One example is the eternalcongestion control solution deployed in the Internet TransportControl Protocol (TCP) [2], [3] and subsequent “fixes” [4]–[7].It is worth noting that the Available Bit Rate (ABR) problem [8]in Asynchronous Transfer Mode (ATM) has witnessed a similarapproach, with popular congestion control schemes (see, e.g.,[9]–[11]) also developed using intuition, again resulting insimple nonlinear control designs. Despite the ad-hoc approachand their simplicity, these have shown remarkable performanceand were demonstrated to be robust in a variety of real life andsimulated scenarios. But, under certain conditions, empiricaland analytical evidence demonstrate the poor performance andcyclic behavior of the controlled TCP/IP Internet ([12]–[14]).This is exacerbated as the link speed increases to satisfy de-mand, and also as the demand on the network for better qualityof service increases. Note for WAN networks a multifractalbehavior has been observed [15], and it is suggested that thisbehavior—cascade effect—may be related to existing networkcontrols [16].
To understand, and importantly to predict, this demonstratedpoor behavior is no easy task, especially since these schemesare designed with significant nonlinearities (e.g., two-phase—slow start and congestion avoidance—dynamic windows, bi-nary feedback, additive-increase multiplicative-decrease flowcontrol etc). The formal, rigorous, analysis of the closed loopbehavior is difficult if at all possible, even for single control loopnetworks. Furthermore, the interaction of additional nonlinearfeedback loops can produce unexpected and erratic behavior[17]. Clearly, proven effective congestion control schemes areneeded.
Despite the successful application of control theory to othercomplex systems (e.g., power, traffic, chemical plants, spacestructures, aerospace systems, etc.), the development of networkcongestion control based on control theoretic concepts is quiteunexplored. This in spite of the significant demands placed onthe network system over recent years for the delivery of guar-anteed performance in terms of quality of service to the users.One may attribute this to the complexity of the control problem,coupled with the lack of collaboration between teletraffic en-
1063-6692/$20.00 © 2005 IEEE

PITSILLIDES et al.: ADAPTIVE NONLINEAR CONGESTION CONTROLLER FOR A DIFFERENTIATED-SERVICES FRAMEWORK 95
gineers and control systems theorists (though lately there aresigns of increased collaboration). Most of the current conges-tion control methods are based on intuition and ad hoc con-trol techniques together with extensive simulations to demon-strate their performance. The problem with this approach is thatvery little is known why these methods work and very little ex-planation can be given when they fail. Several attempts havebeen made to develop congestion controllers using optimal [18],linear [17], [19]–[22], predictive adaptive [23], [24], fuzzy andneural [25]–[27], and nonlinear [28]–[30] control. Despite theseefforts, the design of congestion network controllers whose per-formance can be analytically established and demonstrated inpractice is still a challenging unresolved problem. Recent ad-vances in nonlinear adaptive control theory [31] offer potentialfor developing effective network congestion controllers whoseproperties can be analytically established.
This paper proposes a generic scheme for congestion controlbased on nonlinear and adaptive control ideas. It uses an inte-grated dynamic congestion control approach (IDCC). A specificproblem formulation for handling multiple differentiated classesof traffic, operating at each output port of a switch is illustrated.IDCC is derived from nonlinear adaptive control theory usinga simple fluid flow model. The fluid flow model is developedusing packet flow conservation considerations and by matchingthe queue behavior at equilibrium. While the fluid model maynot be that accurate all the time the control technique used takesinto account the presence of modeling errors and inaccuraciesand minimizes their effect.
Recently, there is pressure on the Internet to transform intoa multiservices high-speed network, see, e.g., Intserv and Diff-Serv architectures [32], [33]. Lately, interest is mainly for Diff-Serv architectures, as scalability problems have been reportedfor Intserv. Following the same spirit adopted by the IETF Diff-Serv working group for the Internet [33] we define classes ofaggregated behavior. In this paper we define three services: Pre-mium Traffic Service, Ordinary Traffic Service, and Best EffortTraffic Service. It should be noted that the methodology used isgeneral and independent of technology, as, for example, TCP/IPor ATM. The proposed IDCC algorithm can be classified as Net-work-Assisted Congestion Control [34] and uses queue lengthinformation for feedback. It is becoming clear [35] that the ex-isting end-to-end TCP congestion avoidance mechanisms, whilenecessary and powerful, are not sufficient to provide good ser-vice in all circumstances. Basically, there is a limit as to howmuch control can be accomplished from the edges of the net-work. Some mechanisms are needed in the routers to comple-ment the endpoint congestion avoidance mechanisms, as sug-gested by several researchers [36], [12], [37]–[39]. Note thatthe need for gateway control was realized early; e.g., see [2],where for future work the gateway side is advocated as neces-sary. For TCP traffic, the newly developed strategies [36], [37],[35], [38], [39] advocate a more active router participation inthe generation of a more responsive feedback signal. In partic-ular, RED [36] has stimulated a plethora of activities, includingextensive evaluations and further techniques [40]. IDCC oper-ates locally for the Premium Traffic Service (note similarity inconcept with RED [36]) and for the Ordinary Traffic Service it
sends feedback to the sources to regulate their rate. Several ap-proaches for explicit or implicit feedback to the sender can beadopted, as well as conversions to TCP type window; these arebriefly discussed in Section II-C.
The IDCC has a number of important control attributes ([25],[22]), such as:
• It exhibits provable stable and robust behavior at eachport. By tightly controlling each output port, the overallnetwork performance is also expected to be tightlycontrolled.
• It achieves high utilization with bounded delay and lossperformance.
• It exhibits good steady-state and transient behavior; noobservable oscillations and fast rise and quick settlingtimes.
• It uses minimal information to control system and avoidsadditional measurements and noisy estimates: (i) usesonly one primary measure, namely queue length; (ii) doesnot require per connection state information; (iii) doesnot require any state information about set of connec-tions bottlenecked elsewhere in the network (not even acount of these connections). In order to improve speed ofresponse, an estimate of number of active sources at theswitch ( ) can be useful. However, in simulations goodperformance was obtained for a constant value set to one;(iv) computes Ordinary Traffic allowable transmissionrate only once every ms (the control update period)thereby reducing processing overhead. The controller isfairly insensitive to choice of value for and .
• It achieves max/min fairness in a natural way without anyadditional computation or information about bottleneckrates of individual connections.
• It can guarantee a minimum agreeable service ratewithout any additional computation.
• It works over a wide range of network conditions, such asround trip (feedback) delays (evaluated from 0 to 250 msRTT), traffic patterns, and controller control intervals(evaluated from 32 to 353 celltimes), without any changein the control parameters.
• It works in an integrated way with different services (e.g.,Premium Traffic, Ordinary Traffic, Best Effort Traffic)without the need for any explicit information about theirtraffic behavior.
• The proposed control methodology and its performanceare independent of the size of the queue reference valuesas long as they are below the saturation point of the associ-ated queues. As a result the network operator can dynam-ically steer the network operating region in accordancewith global considerations, and has the flexibility to bemore or less aggressive, in accordance with the currentnetwork and user needs.
• It has simple implementation and low computationaloverhead.
• It features a very small set of design constants, that can beeasily set (tuned) from simple understanding of the systembehavior.

96 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 1, FEBRUARY 2005
This paper is organized as follows. Section II presents thecontrol problem and objective, and Section III illustrates theformal derivation of the integrated dynamic congestion con-troller (IDCC). The analytic performance evaluation of the de-rived algorithm is presented in Appendixes I and II. Section IVdiscusses the implementation of IDCC and evaluates its perfor-mance. The attributes discussed above are demonstrated usingsimulations. Finally, Section V presents our conclusions.
II. THE CONTROL PROBLEM AND OBJECTIVE
We propose a generic scheme for handling multiple differen-tiated classes of traffic, using an integrated dynamic congestioncontrol approach, derived using nonlinear control theory. By dif-ferentiating each class, the control objective for each class is“decoupled” from the rest, thus simplifying the overall controldesign. The control strategy is model based dynamic feedbacklinearization, with proportional plus integral action and adap-tation. It should be noted that the methodology used is generaland independent of technology, as for example TCP/IP or ATM.1
Generically, we use the terms packet for both IP packets andATM cells, and switch for ATM switch and IP routers.
A. Proposed Differentiated-Services Framework
Recently, the DiffServ working group adopted two broadaggregate behavior groups: the Expedited Forwarding (EF)Per-Hop Behavior (PHB) [41] and the Assured Forwarding(AF) PHB [42]. The EF-PHB can be used to build a low loss,low latency, low jitter, assured bandwidth end-to-end service,thus indirectly providing some minimum “aggregated” qualityof service. The AF-PHB group provides delivery of IP packetsin four independently forwarded AF classes. Within each AFclass, an IP packet can be assigned three different levels of dropprobabilities. Each class can be provided with some minimumbandwidth and buffer guarantees. We adopt the same spirit asthe IETF DiffServ working group [33] and divide traffic intothree basic types of service: Premium Traffic Service, OrdinaryTraffic Service, and Best Effort Traffic Service.
The Premium Traffic Service may belong to the EF-PHB in aDiffServ architecture and is designed for applications with strin-gent delay and loss requirements that can specify upper boundson their traffic needs and required quality of service. It is envis-aged that the user may contract with the network. The only com-mitment required by the user is not to exceed the peak rate. Notethat policing units at the edge of the network may provide en-forcement of this commitment. The network contract then guar-antees that the contracted bandwidth will be available when thetraffic is sent. Typical applications include video on demand,audio, video conferencing, etc.
The Ordinary Traffic Service may belong to the first class ofthe AF-PHB in a DiffServ architecture. Note that different prior-ities may be assigned, without complicating greatly the design.The Ordinary Traffic Service is intended for applications that
1Since this paper was submitted, IDCC was successfully integrated withinRMD (Resource Management in DiffServ) framework, which extends DiffServprinciples to provide dynamic resource management and admission control inIP-DiffServ domains. This work was supported in part by EC research projectSEACORN: Simulation of Enhanced UMTS Access and Core Networks, IST-2001–34900, 2002.
Fig. 1. Generic output buffered K input-output switch.
have relaxed delay requirements and allow their rate into thenetwork to be controlled. These Services use any left over ca-pacity from the Premium Traffic. Note that to ensure that band-width is leftover from the Premium Traffic Service a minimumbandwidth may be assigned, e.g., by using bandwidth allocationbetween services or connection admission. Typical applicationsinclude web browsing, image retrieval, e-mail, ftp, etc.
Finally, the Best Effort Traffic Service may belong to thelast class of the EF-PHB in a DiffServ architecture. It has nodelay or loss expectations. It opportunistically uses any instanta-neous leftover capacity from both Premium and Ordinary TrafficServices.
B. Proposed Integrated Dynamic Congestion ControlApproach
Each service transmits packets to destination terminals. Thepackets from several Origin-Destination (OD) pairs traverse anumber of switches on route to the destination. Each OD flowmay be classified as Premium Service, Ordinary Service, or BestEffort Service.
We assume a generic output buffered switch as a referencemodel. The switch has input and output ports (see Fig. 1).Each output port has a number of physical or logical queues:one for each traffic class. There is a potential bottleneck at eachoutput port of the switch, caused as a result of the rate mismatchbetween the flow into and out of the queue. Since the cause ofthe bottleneck is limited link capacity at the output ports of theswitch, the congestion control scheme will be explained withrespect to a specific output-port (note that there is no couplingbetween the output-ports). A congestion controller is installedat each output port. By tightly controlling each output port, theoverall performance is also expected to be tightly controlled.
At each output port of the switch we assume that dedicatedbuffer space is allocated for each one of the three services andthat the server can be shared between the three in a controlledfashion (see Fig. 2). Premium Service requires strict guaranteesof delivery, within given delay and loss bounds. It does not allowregulation of its rate (or at least regulation that will affect thegiven delay bounds). Any regulation of this type of traffic has

PITSILLIDES et al.: ADAPTIVE NONLINEAR CONGESTION CONTROLLER FOR A DIFFERENTIATED-SERVICES FRAMEWORK 97
Fig. 2. Implementation of the control strategy at each switch.
to be achieved at the connection phase. Once admitted into thenetwork the network has to offer service in accordance with thegiven guarantees. This is the task of the Premium Traffic Con-troller. Ordinary Traffic on the other hand allows the networkto regulate its flow (pace it) into the network. It cannot tolerateloss of packets. It can however tolerate queueing delays. This isthe task of the Ordinary Traffic Controller. Best Effort Serviceon the other hand offers no guarantees on either loss or delay. Itmakes use of any instantaneous leftover capacity.
For Premium Traffic Service, our approach is to tightly con-trol the length of the Premium Traffic queue to be always closeto a reference value, chosen by the network operator, so as toindirectly guarantee acceptable bounds for the maximum delayand loss. The capacity for the Premium Traffic is dynamicallyallocated, up to the physical server limit, or a given maximum.In this way, the Premium Traffic is always given resources, up tothe allocated maximum ( : maximum available or assignedcapacity, and : maximum buffer size) to ensure the provi-sion of Premium Traffic Service with known bounds. Due to thedynamic nature of the allocated capacity, whenever this servicehas excess capacity beyond that required to maintain its QoSat the prescribed levels (as set by the queue length referencevalue) it offers it to the Ordinary Traffic Service. This algorithmuses the error between the queue length of the Premium Trafficqueue and the reference queue length as the feedbackinformation and calculates the capacity to be allocated toPremium Traffic once every control interval ms, based onthe control algorithm discussed in Section III.
The Ordinary Traffic Service Controller regulates the flow ofOrdinary Traffic into the network, by monitoring the length ofthe Ordinary Traffic queue and the available capacity (leftoverafter the capacity allocated to Premium Traffic). The lengthof the Ordinary Traffic queue is compared with the referencevalue (could be chosen by network operator) and using anonlinear control strategy it calculates and informs the sourcesof the maximum allowed rate they can transmit over the nextcontrol interval. This algorithm takes into account leftovercapacity , uses error betweenqueue length of Ordinary Traffic queue and referencequeue length , and calculates the common rate tobe allocated to the Ordinary Traffic users once every controlinterval ms, based on the control algorithm discussed in
Section III. Once the common rate is calculated it is sent (fedback) to all upstream sources. Based on the received commonrate, the source does not allow its transmission rate to exceedthis value over the next control interval. Note that any excesssource demand (above received common rate) is queued at thesource queues, rather than be allowed to enter the network, andthus cause congestion.
The Best Effort Traffic Service operates at the packet/cellscale and uses any instantaneous left over capacity. This isachieved by monitoring the combined server buffer at serverscheduler. In the absence of any packets in the server bufferawaiting transmission it allows a packet from the Best EffortService queue to enter the server buffer (buffer has a maximumof two packets; one in service and one in queue). Note that forATM this function may be trivial, but for variable size packetsmore care is required so that time sensitive packets are notcaught behind very large Best Effort packets.
C. Feedback Signalling Schemes for Ordinary Traffic
As discussed above, for Ordinary Traffic the common rate(the feedback signal) must be communicated to the sources foraction. Several approaches may be adopted. Indicatively, somefeedback signalling schemes include: using full feedback by up-dating special fields in packets or cells (e.g., RM cells in anATM setting [8], [10], [9]] or in TCP by modifying the receiverwindow field in the TCP header [5] of a packet sent by re-ceiver to source); using Explicit Congestion Notification (ECN)as proposed for the Internet [37], [38] and ATM [8]; using im-plicit feedback, as for e.g., timeout due to lost packet [2], theend-to-end approach in [34], using round-trip delay values asindicators of the level of congestion [7]; a conversion from rateto window for TCP like control [43]; or even more sophisticatedschemes, such as adaptive binary marking [44], where sourceschange their rate according to variations in the binary signalspresent in feedback stream, using similar principles to adaptivedelta modulation (ADM) used in communication systems. Inthis paper, the implementation details of the feedback signallingscheme are left for further study. For a simulative evaluationof the proposed control scheme we use explicit feedback, pro-vided by updating special fields in packets (RM cells in an ATMsetting).
D. Dynamic Network Models
Most of the current congestion control techniques use intu-ition and ad hoc control techniques together with extensive sim-ulations to demonstrate their performance. The problem withthis approach is that very little is known why these methodswork and very little explanation can be given when they fail. Theuse of dynamic models could provide a better understandingof how the network operates and can be used to develop con-trol techniques whose properties can be established analyticallyeven when such techniques are based on intuition and ad hocguesses. For control design purposes the model does not needto be accurate. It is because of the inability of modeling the realworld accurately that feedback was invented and control theoryis widely used. A good feedback control design (e.g., based onrobust, possibly adaptive, control techniques [31]) should be

98 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 1, FEBRUARY 2005
able to deal with considerable uncertainties and inaccuraciesthat are not accounted for in the model.
Using the above principle, below we present a known simpledynamic model, which we assume captures the essential dy-namics, and is used for designing the proposed congestioncontroller.
1) Fluid Flow Model: A dynamic model is sought, in a formsuitable for a distributed control solution. The objective is tofind a model which captures the “essential” dynamic behavior,but has low-order complexity, as, for example, relative to de-tailed probabilistic models such as the Chapman–Kolmogorovequations for determining time-dependent state probabilitydistribution for a Markovian queue [45]. Using the approximatefluid flow modeling approach proposed by Agnew [46], variousdynamic models have been used by a number of researchers[40], [45], [47]–[49] to model a wide range of queueing andcontention systems. Note that several variants of the fluid flowmodel have been extensively used for network performanceevaluation and control, see, for example, an early referencethat stimulated a lot of interest thereafter [50], and a recentreference of the present interest [51].
Using the flow conservation principle, for a single queue andassuming no losses, the rate of change of the average number ofcells queued at the link buffer can be related to the rate of cellarrivals and departures by a differential equation of the form
(1)
where is the state of the queue, given by the ensemble av-erage of the number of cells in the system (i.e., queue +server) at time , i.e., ; is the ensembleaverage of cell flow out of the queue at time ; and is theensemble average of cell flow into the queue at time .
The fluid flow equation is quite general and can model a widerange of queueing and contention systems as shown in the liter-ature [45], [47]–[49].
Assuming that the queue storage capacity is unlimited and thecustomers arrive at the queue with rate , then is justthe offered load rate since no packets are dropped. The flowout of the system, , can be related to the ensemble averageutilization of the link by , whereis defined as the capacity of queue server. We assume thatcan be approximated by a function which represents theensemble average utilization of the queue at time as a functionof the state variable. Thus, the dynamics of the single queue canbe represented by a nonlinear differential equation of the form
(2)
which is valid for andwhere is the maximum possible queue size
and the maximum possible server rate.Different approaches can be used to determine .
A simple, commonly used, approach to determine isto match the steady-state equilibrium point of (2) with thatof an equivalent queueing theory model, where the meaningof “equivalent” depends on the queueing discipline assumed.This method has been validated with simulation by a numberof researchers, for different queueing models [45], [47], [48].
Fig. 3. Time evolution of network system queue state obtained using OPNETsimulation (broken line) and solution of fluid flow model (solid line). The inputto both OPNET and fluid flow is the same on–off source (see Fig. 5).
Other approaches, such as system identification techniques andneural networks, can also be used to identify the parameters ofthe fluid flow equation.
We illustrate the derivation of the state equation for anqueue following [45]. We assume that the link has
a First-In–First-Out (FIFO) service discipline and a common(shared) buffer. The following standard assumptions are made:the packets arrive according to a Poisson process; packet trans-mission time is proportional to the packet length; and that thepackets are exponentially distributed with mean length 1. Then,from the queueing formulas, for a constant arrival rateto the queue the average number in the system at steady stateis . Requiring that when ,the state model becomes
(3)
The validity of this model has been studied by a number ofresearchers, including [47] and [48].
In [52] we present an example for modeling an Origin-Des-tination path in a packet based network derived using fluid flowarguments and also demonstrate the ability of the fluid flowmodel to model queueing systems by verifying its behavior incomparison with an event based simulation using OPNET. Atypical time evolution of the queue state from both the modeland OPNET simulation are presented in Fig. 3. We can ob-serve that there is a reasonable agreement between the proposedmodel and the observed behavior of the system, as simulated bya discrete event simulator, which demonstrates confidence to themodel for use in the design of the control system.
Note that similar fluid flow models in both the discreteand continuous time form have been used by a number ofresearchers for designing or analyzing the behavior of networksystems under control [14], [17], [19], [40], [53], [54]. Forexample, Hollot et al. [40] using fluid flow arguments havedeveloped a nonlinear dynamic model of TCP to analyze anddesign Active Queue Management (AQM) Control Systemsusing RED. For ATM, Rohrs [17] using similar fluid flow

PITSILLIDES et al.: ADAPTIVE NONLINEAR CONGESTION CONTROLLER FOR A DIFFERENTIATED-SERVICES FRAMEWORK 99
arguments derived a discrete fluid flow model of the stateof the buffer at the output port of an ATM switch, and usedthis model to evaluate the performance of a binary BackwardExplicit Congestion Notification (BECN) control algorithm.He demonstrates the undesired cyclic behavior of the controlledsystem. This (undesired) cyclic behavior is also presented in[14] for TCP/IP, using dynamic models of the behavior of thedifferent phases of the TCP/IP congestion algorithms (slowstart and congestion avoidance phase) for high bandwidth-delayproducts and random loss. Their results are demonstrated usingsimulations. In [54] they use a similar model, as given by (3),and intuition to design an ABR flow control strategy (referredto as queue control function) to keep the queue controlled.They use analysis and simulation to evaluate the proposedstrategy. It is worth noting that many other types of modelshave been proposed, either using queueing theory arguments,or others, but in most cases the derived models are too complexfor deriving simple to understand and implement controllers.Efforts to simplify these models for control design purposesoften lead to ignoring the dynamic aspects of the networksystem. For example, in [55] the analysis of the performanceof simple (binary) reactive congestion control algorithms iscarried out using a queueing theory approach model, whichis limited to steady-state analysis only due to the inability tohandle the resultant computational complexity for the dynamiccase. In this paper we explore the simple fluid flow dynamicmodel presented above (3) to demonstrate the derivation ofsimple to implement, yet powerful congestion controller.
III. PROPOSED INTEGRATED CONGESTION CONTROL
STRATEGY: DESIGN AND ANALYSIS
At each output port of a switch, we implement IDCC, the inte-grated congestion control strategy (see Fig. 2). IDCC is an inte-grated strategy developed for Premium Traffic, Ordinary Trafficand Best Effort Traffic. It is based on the fluid flow model (3)used to model the input-output characteristics of the switch (seeFig. 2), as follows:
(4)
where is the measured (averaged) state of the PremiumTraffic buffer, is the capacity allocated to the PremiumTraffic, and is the rate of the incoming Premium Traffic.
(5)
where is the measured (averaged) state of the OrdinaryTraffic buffer, is the capacity allocated to the OrdinaryTraffic and is the rate of the incoming Ordinary Traffic.
Model (4) is used to develop the Premium Traffic controlstrategy and model (5) the Ordinary Traffic strategy.
A. Premium Traffic Control Strategy
The selected control strategy for Premium Service is devel-oped using the model (4) as follows.
Let , then whereis the desired average state of the Premium Traffic buffer. Thenfrom (4)
(6)
where and is a constant indicatingthe maximum rate that could be allocated to incoming PremiumTraffic (e.g., through a connection admission policy) andis the physical capacity of the server.
The control objective is to choose the capacity to be al-located to the Premium Traffic under the constraint that the in-coming traffic rate is unknown but bounded by so thatthe averaged buffer size is as close to the desired value
(chosen by the operator or designer) as possible. In mathe-matical terms we need to choose so that underthe constraints that and .
Using feedback linearization and robust adaptive controlideas we choose the control input, i.e., capacity , as
(7)
(8)
where
ififif
(9)
and
(10)
where is a projection operator defined as
ifififotherwise
(11)
where , and , are design constants that affect theconvergence rate and performance. The stability analysis of theabove control strategy is presented in Appendix I.
B. Ordinary Traffic Control Strategy
The control strategy is developed using the fluid flow model(5) as follows.
Let , then whereis the desired average state of the Ordinary Traffic buffer. Thenfrom (5)
(12)
The control objective is to choose and so that theaverage buffer size remains close to the desired value ,

100 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 1, FEBRUARY 2005
chosen by the operator or designer. The value of is givenby
(13)
In other words the capacity allocated to the outgoing OrdinaryTraffic is whatever is left after allocation to the Premium Traffic.Using feedback linearization we choose the controlled trafficinput rate as
(14)
(15)
where is a design constant. The analysis of the abovecontrol strategy is given in Appendix II. Note that to achieve de-coupling of the stability and transient properties of the systemfrom time varying parameters, such as the number of connec-tions , the calculated common rate is divided by ,an estimate of :
(16)
The estimation algorithm for is a separate research topic.We have derived an algorithm, based on on-line parameter iden-tification techniques, which offers guaranteed convergence tothe true exponentially fast. Here we are assuming that suchan estimate exists. This establishes that we can decouple thecontrol algorithm from the number of bottlenecked sessions ateach link and so the analysis presented above is still valid. Thesimulation examples presented later show good performance,even with using a constant value of which exhibits ro-bustness of the algorithm with respect to inaccuracies in the es-timation of .
C. Best Effort Traffic Control Strategy
The Best Effort traffic controller operates on an instantaneous(packet or cell) time scale. It utilizes any instantaneous left overcapacity to transmit a packet from the Best Effort buffer. Thisincreases the network utilization during periods of insufficientsupply of packets from both the Premium and Ordinary TrafficServices.
IV. PERFORMANCE EVALUATION
In this section we use simulations to evaluate the performanceof IDCC. We first present the implementation details of the con-trol algorithm, and then the simulation scenarios and simulationresults.
A. Implementation of Integrated Control Strategy
At each switch output port (see Figs. 1 and 2) we implementthe integrated control strategy derived in the previous section.
The references , , and the design constants , , ,and are first selected.
At each instant ( ) which corresponds to time, where is the sampling period, we calculate
(17)
(18)
(19)
(20)
where
(21)
(22)
For computational reasons the computation of (11) is per-formed in discrete time as
(23)
Then
ififotherwise
(24)
where is chosen as , isa design constant, and
ififotherwise
(25)
ififotherwise.
(26)
Remarks: is used at the switch output port by thescheduler to dynamically allocate capacity to the PremiumTraffic queue (see Fig. 2). The allocated capacity is held con-stant over the period of the control interval ms.
The calculated common rate is sent to each of the Or-dinary Traffic sources every ms using feedback signallingincluded in RM cells, as discussed earlier.
B. Simulations
For the evaluation of the performance using simulation, weuse a network comprising a number of ATM switches. As dis-cussed earlier, if the ATM switches are replaced by routers sim-ilar performance is expected, if the calculated common rate issignalled to the sources in a similar fashion.
1) Simulation Model: Our ATM network model is shown inFig. 4. It consists of three ATM switches. This reference modelhas been designed to capture: the interference between traffictravelling a different number of hops; the interference from real-time (Premium) traffic competing with Ordinary Traffic for thefinite server resources; the effect of propagation delay on theeffectiveness of the control scheme; and the fairness (or lack ofit) among traffic travelling a different number of hops.
Using the reference model described earlier, we assumeall queueing occurs at the output buffers of the switches andthat there is no internal blocking in the switch. In each ATMswitch there are three separate logical buffers (per output port)

PITSILLIDES et al.: ADAPTIVE NONLINEAR CONGESTION CONTROLLER FOR A DIFFERENTIATED-SERVICES FRAMEWORK 101
Fig. 4. Simulation network model.
collecting Premium Traffic, Ordinary Traffic and Best EffortTraffic. The Premium Traffic buffers can accommodate 128cells, and the Ordinary Traffic buffer can accommodate 1024cells. Best Effort Traffic is selected to have infinite bufferspace. The queues are serviced in accordance with the strategy,outlined in Section III.
We use the same network model for the simulation of ATMLAN and ATM WAN, but the distances between the switchesare changed to reflect the different geographic spans of the twonetwork types. In the ATM WAN case, the delay between eachswitch, due to the link distance is set at 20 ms for each link, andthe delay between the last switch and the destination station isalso set at 20 ms (thus a round trip delay of 120 ms is present).All of the links are assumed to transmit at 155 Mb/s. For theOrdinary Traffic we consider 40 connections at the edge of thenetwork (20 are connected directly to ATM switch 0, and 10in each of ATM switches 1 and 2), which can have their trans-mission rate controlled by the network. Three of the OrdinaryTraffic flow paths are 1-hop paths, and one is a 3-hop path. Alsofour VBR and two CBR sources are directly connected to ATMswitch 2 (1-hop path) representing Premium Traffic. Each Or-dinary Traffic terminal generates traffic based on a three-statemodel (see Fig. 5 for model, and Table I for the selected pa-rameters). In the idle state no traffic is generated. The idle pe-riod is generated from a geometric distribution with a mean pe-riod chosen to adjust the offered load on the link. In the activestate the source generates a series of packets or bursts whichare interspersed by short pauses. The period of each pause isdrawn from a negative exponential distribution. The packet sizeand the number of packets generated during an active periodare also geometrically distributed. We have considered the Or-dinary Traffic source terminal buffers as infinite. Each VBRsource is simulated by using the autoregressive model proposedby Maglaris et al. [56] (we consider a video source with 480 000pixels/frame). The CBR source generates 25 Mb/s and paces thecells into the network uniformly. In case of cell losses, whichoccur during the periods of congestion, we use a simple retrans-mission protocol. A packet is presumed to be lost even if a singlecell is lost. Packets that are received by the receive terminal withmissing cells are retransmitted by the source until successful de-livery. The ”useful network throughput” represents the actualthroughput of packets (in Mb/s) that are eventually delivered
Fig. 5. Ordinary Traffic source model. (a) Connection activity. (b) Packetactivity. (c) Cell activity. The model parameters selected for simulations canbe seen in Table I.
TABLE IORDINARY TRAFFIC SOURCE MODEL PARAMETERS
to the destination without packet loss (after retransmission ifnecessary).
We have used OPNET simulation tools for our experiments.Using simple understanding of the ATM, we set the controllerdesign constants as follows.
For the Premium Traffic controller:for a physical buffer size of 128 cells,
, , , .For the Ordinary Traffic controller:
for a physical buffer of 1024cells, , .
The control update period ms was set at several values( celltimes ms, 75 celltimes, 175 celltimes, and
celltimes ms) in order to investigate the sensitivity ofcontrol to the value of the control update period.
C. Simulation Results
1) Steady State and Transient Behavior: Using the simula-tion model we evaluate the performance of ATM LAN and ATMWAN.
As noted previously, Premium Traffic (CBR/VBR sources)has a priority. We can guarantee them maximum queueing de-lays not exceeding in an average sense the sum of the referencevalue of each of the buffers in the path, as set by the network ad-ministrator. In order to test the responsiveness of our controller(transient behavior) we set a variable reference point for this ser-vice. At the beginning we set the reference point to 100 cells.After s it is set to 50 cells and after s it is againraised to 100 cells (where stands for time in seconds). In this

102 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 1, FEBRUARY 2005
Fig. 6. Switch 2 (last switch) time evolution of Premium Traffic queuelength for a LAN and WAN for 140% load demand. Note that as the feedbackinformation is local, there is no deterioration in performance due to theincreased WAN propagation delay.
way we not only show that our controller can match the refer-ence values but that it can also cope with dynamic changes thatoccur in the network (e.g., another connection is set up, morebandwidth is required for real-time services, etc). To simulate amore realistic scenario, we also change the reference on the Or-dinary Traffic. Since we can accept higher delays the referencevalues are set at 900 cells for s. After that time it is set to300 cells until s and after s it is raised to 600 cells. Itcan be noticed that the reference point changes between the Pre-mium and Ordinary Traffic are not synchronized between them.Note that the Premium and Ordinary Traffic sources generatetraffic according to a realistic scenario (they are not saturatedsources). The controlled system performance for the case of anATM under heavy load (140%) is demonstrated here, for botha LAN and a WAN. Fig. 6 shows the behavior of the PremiumTraffic. As expected the controlled system behavior is the samefor both WAN and LAN networks, as the feedback is local. InFig. 7 the behavior of the Ordinary Traffic queue length is shownwith varying control periods for both LAN and WAN config-urations. The most heavily congested switch (Switch 2) is se-lected, where Ordinary Traffic competes with Premium Trafficfor the scarce network resources. The figure shows that the con-troller adapts very quickly to reference point changes (couldbe likened to abrupt changing network conditions), as well asshowing a reasonable insensitivity to control periods rangingfrom 0.085 ms to 1 ms (a more than 10 tenfold increase). Itis very important to notice that there are no observable over-shoots and undershoots (except for the undershoot at 0.5 s forthe longest controller period of 1 ms), no oscillations or cyclicbehavior, and that the controlled system responds very quicklyto the changes introduced in both queues. In other words, thesystem exhibits a good transient behavior. So we can say thatwe can dynamically control the buffer state and the sourcessending rate, which in turn implies that the network is well con-trolled and congestion is avoided, or quickly controlled. Notethat the case of the WAN exhibits comparable performance withthe LAN, even though the propagation delay (and therefore theforward and feedback delay) have substantially increased due to
Fig. 7. Switch 2 (last switch) time evolution of the Ordinary Traffic queuelength. (a) LAN and (b) WAN for 140% load demand. (The control period variesbetween 32 celltimes � 0:085 ms to 353 celltimes � 0:94 ms).
round trip time of about 120 ms. Also, the observed deteriora-tion due to the tenfold increase in control period is acceptable.
Observe that for the case of Premium Traffic queue (Fig. 6)the reference point matches exactly the observed behavior (100cells and 50 cells). However, in the case of Ordinary Traffic(Fig. 7) a sizeable offset is observed for each reference setting.Note that introducing integrating action in the controller can rec-tify this offset, however one can argue whether the extra com-plexity is justified, as an exact reference value may not be nec-essary for this service.
We have also monitored the queue length behavior forSwitch 0 and Switch 1. We observe that both queues are wellcontrolled with no overshoots or undershoots exceeding 2%.For both switches, the reference point is set equal to a constant600 cells for the Ordinary Traffic and the Premium Traffic isset to zero. Note that even though the 3-hop traffic behavior isdictated by the bottleneck switch downstream (Switch 2) thereis no observable performance degradation. Again, an offsetfrom the reference value is observed, which can be rectified byintroducing integrating action.
The throughput for the bottlenecked switch was also moni-tored, exhibiting a constant and close to 100% utilization; 98%

PITSILLIDES et al.: ADAPTIVE NONLINEAR CONGESTION CONTROLLER FOR A DIFFERENTIATED-SERVICES FRAMEWORK 103
Fig. 8. Typical behavior of the time evolution of the common calculatedallowed cell rate at switch 2. (a) LAN. (b) WAN.
for typical simulation runs. This is very important since the con-troller not only avoids congestion but also fully utilizes the avail-able resources, even for demands considerably exceeding theavailable link capacity (140% in this case).
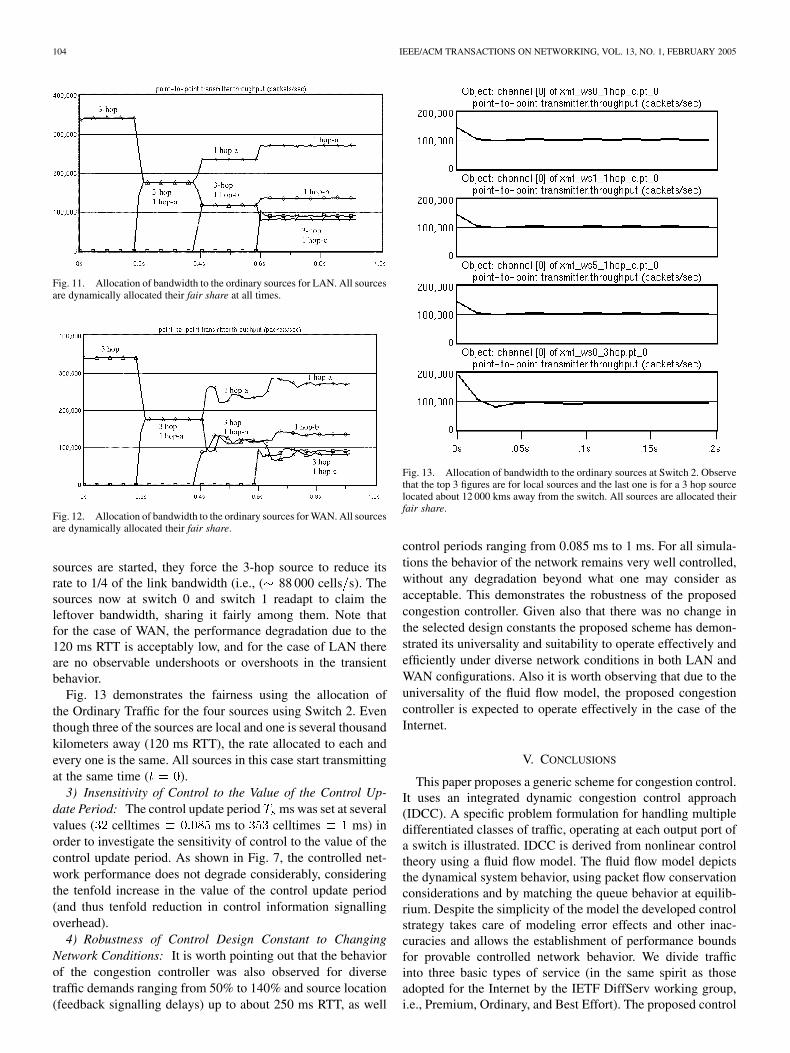
The time evolution of the calculated common allowed cellrate for the congested switch is shown in Fig. 8 for both LANand WAN, for 140% load demand. Note that this common al-lowed cell rate is sent to all sources using this switch. This rateis used by the sources as the maximum rate that they are allowedto transmit over the next control update period. The time evolu-tion of the transmission rate of a number of controlled sourcesis shown in Fig. 9. In the figure, 3-hop and 1-hop-c sources areshown for both LAN and WAN networks. Note that the sourcesare not saturated. The source rates quickly adapt fairly to theirsteady-state values, even though the 3-hop sources, in the caseof the WAN, are located about 12 000 km away (equivalently60 ms delay for cells before they arrive at the switch). The issueof fairness is discussed next.
2) Fairness: Fairness is another important attribute of anycongestion control system. Of course, fairness in networks isrelative. Since we have Premium Traffic Services and OrdinaryTraffic Services it means that the latter must be satisfied with
Fig. 9. Typical behavior of the time evolution of the transmission rateof controlled sources using Switch 2. (a) LAN configuration. (b) WANconfiguration.
Fig. 10. Network test configuration for demonstrating dynamic behavior andfairness.
the leftover capacity. All Ordinary Traffic sources should dy-namically share the available bandwidth with no discrimination,for example due to their geographic proximity to the switch.Every source sends with the same rules. The fairness shown byIDCC can be inferred from Fig. 9 for a number of typical on–offsources. To clearly illustrate the fairness of our scheme we adoptnext a similar approach to other published works.
We select the network test configuration shown in Fig. 10 andset all sources to be saturated (i.e., always have cells to transmit).The chosen configuration allows easy interpretation of the ex-pected behavior. It is selected to demonstrate the fairness in thepresence of large disparity in distance from the switches (localand far sources) and aggressiveness and adaptability to dynamicchanges in the network state.
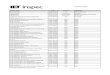
In Figs. 11 and 12 we demonstrate aggressiveness, fairness,and adaptability of the control scheme for both LAN and WANnetwork topologies. We let the 3-hop traffic start transmittingat , thus all link bandwidth is totally available to the3-hop traffic. The 1-hop-a traffic at switch 0 is next startedat , thus forcing the 3-hop traffic to share equally theavailable bandwidth between them. At the two 1-hop-bsources are started at switch 1, thus forcing the 3-hop traffic toshare the available link bandwidth between the three sourcescompeting for it at switch 1. Their fair share is 51.6 Mb/s( 117 000 cells/s). Since the 3-hop traffic was forced to reduceits rate by switch 1, it now leaves some unused capacity atswitch 0, which the 1-hop-a source quickly takes up, i.e., at
the 1-hop-a source increases its rate from 77.5 Mb/s( 175 000 cells s) to 90 Mb/s ( 204 000 cells s), taking upthe extra capacity. Similarly, at when the three 1-hop-c
104 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 1, FEBRUARY 2005
Fig. 11. Allocation of bandwidth to the ordinary sources for LAN. All sourcesare dynamically allocated their fair share at all times.
Fig. 12. Allocation of bandwidth to the ordinary sources for WAN. All sourcesare dynamically allocated their fair share.
sources are started, they force the 3-hop source to reduce itsrate to 1/4 of the link bandwidth (i.e., ( 88 000 cells s). Thesources now at switch 0 and switch 1 readapt to claim theleftover bandwidth, sharing it fairly among them. Note thatfor the case of WAN, the performance degradation due to the120 ms RTT is acceptably low, and for the case of LAN thereare no observable undershoots or overshoots in the transientbehavior.
Fig. 13 demonstrates the fairness using the allocation ofthe Ordinary Traffic for the four sources using Switch 2. Eventhough three of the sources are local and one is several thousandkilometers away (120 ms RTT), the rate allocated to each andevery one is the same. All sources in this case start transmittingat the same time ( ).
3) Insensitivity of Control to the Value of the Control Up-date Period: The control update period ms was set at severalvalues ( celltimes ms to celltimes ms) inorder to investigate the sensitivity of control to the value of thecontrol update period. As shown in Fig. 7, the controlled net-work performance does not degrade considerably, consideringthe tenfold increase in the value of the control update period(and thus tenfold reduction in control information signallingoverhead).
4) Robustness of Control Design Constant to ChangingNetwork Conditions: It is worth pointing out that the behaviorof the congestion controller was also observed for diversetraffic demands ranging from 50% to 140% and source location(feedback signalling delays) up to about 250 ms RTT, as well
Fig. 13. Allocation of bandwidth to the ordinary sources at Switch 2. Observethat the top 3 figures are for local sources and the last one is for a 3 hop sourcelocated about 12 000 kms away from the switch. All sources are allocated theirfair share.
control periods ranging from 0.085 ms to 1 ms. For all simula-tions the behavior of the network remains very well controlled,without any degradation beyond what one may consider asacceptable. This demonstrates the robustness of the proposedcongestion controller. Given also that there was no change inthe selected design constants the proposed scheme has demon-strated its universality and suitability to operate effectively andefficiently under diverse network conditions in both LAN andWAN configurations. Also it is worth observing that due to theuniversality of the fluid flow model, the proposed congestioncontroller is expected to operate effectively in the case of theInternet.
V. CONCLUSIONS
This paper proposes a generic scheme for congestion control.It uses an integrated dynamic congestion control approach(IDCC). A specific problem formulation for handling multipledifferentiated classes of traffic, operating at each output port ofa switch is illustrated. IDCC is derived from nonlinear controltheory using a fluid flow model. The fluid flow model depictsthe dynamical system behavior, using packet flow conservationconsiderations and by matching the queue behavior at equilib-rium. Despite the simplicity of the model the developed controlstrategy takes care of modeling error effects and other inac-curacies and allows the establishment of performance boundsfor provable controlled network behavior. We divide trafficinto three basic types of service (in the same spirit as thoseadopted for the Internet by the IETF DiffServ working group,i.e., Premium, Ordinary, and Best Effort). The proposed control

PITSILLIDES et al.: ADAPTIVE NONLINEAR CONGESTION CONTROLLER FOR A DIFFERENTIATED-SERVICES FRAMEWORK 105
algorithm possesses a number of important attributes such asprovable stable and robust behavior, with high utilization andbounded delay and loss performance (can be set by referencevalues), and good steady-state and transient behavior. It usesminimal information to control the system and avoids addi-tional measurements. That is, it uses only one primary measure,namely the queue length. The controller for Ordinary Trafficcomputes and transmits to the sources the common allowabletransmission rate only once every ms (the control updateperiod) thereby reducing processing overhead. The controlleris reasonably insensitive to the value of and and achievesmax/min fairness. It guarantees a minimum agreeable servicerate, and it exhibits robustness in the sense that it works overa wide range of network conditions, such as round trip de-lays, traffic patterns, and control update intervals, without anychange in the control parameters. Furthermore, the controllerworks in an integrated way with different services and hassimple implementation and low computational overhead, aswell as featuring a very small set of design constants that canbe easily set (tuned) from simple understanding of the systembehavior. These attributes make the proposed control algorithmappealing for implementation in real, large-scale heterogeneousnetworks.
In this paper full explicit feedback was used in the simula-tions, signalled using RM cells in an ATM setting to illustratethe properties of the designed strategy and the nonlinear controlmethodology adopted. A challenging task is to investigate otherexplicit and implicit feedback and signalling schemes and othernetwork settings. Also a matter of further research is the analyt-ical assessment of the global stability of IDCC.
APPENDIX IPROOF OF STABILITY OF PREMIUM TRAFFIC
CONTROL STRATEGY
Theorem 1: The control strategy described by the equations(7)–(11) guarantees that is bounded, andand converges close to with time, with an error thatdepends on the rate of change of .
Proof: The closed system is described by the (6)–(11).From (7) we have that could take the following valuesover time:
(27)
If for some then and. Since it follows that after some
time we will have for and will begrowing with . Increasing implies increasing whichmeans that there exists a time close to , i.e.,such that takes the value
(28)
and in this case is equal to 1, since for we have. Then (6) becomes
(29)
Consider the function
(30)
Then
(31)
It can be shown [31] that .Therefore
(32)
for some finite constant .Since is bounded by projection and is bounded
from above by a finite constant it follows that cannot gounbounded. That is large leads to which implies that
is decreasing for large . This argument implies that andtherefore are bounded.
From (32) we have that
(33)
For large (33) implies that the average value of the deviationof from the desired reference is bounded from above bythe average value of the variations [31].
Lets us now examine the possibility of switching offrom the value given by (28) to after some time
. Since for , where is some finite constant
that depends on , is nonincreasing and is decreasing
in the space of , and is constrained not to exceed thevalue of due to projection it follows that if ischosen to be less than , i.e., say, then noswitching will take place.
If instead of we have for some timethen that would imply according to (7) that both
and are large so that. In that case which means that
is decreasing and therefore after a finite time.
The same analysis as above could be repeated to establish that, are bounded and gets closer to with time,
depending on the size of .
Therefore, no matter which value takes according to(7), and will always be bounded and will beforced after finite time to be in the region where decreases
and approaches within an error of the order of inthe average sense. The number of possible switchings could bereduced considerably by properly selecting the design constants
and .

106 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 13, NO. 1, FEBRUARY 2005
APPENDIX IIPROOF OF STABILITY OF THE ORDINARY TRAFFIC
CONTROL STRATEGY
Theorem 2: The control strategy given by (14) guaranteesthat is bounded. When bandwidth becomes availableapproaches with time.
Proof: Since it follows that. If and (from
(12)) thenwhich implies that increases. From (12) it follows thatthere exists a finite time at whichand (12) becomes , which implies that re-duces to zero exponentially fast.
If then , i.e., no bandwidth is allocatedand no traffic is admitted. In such case .
Therefore, in all cases will be bounded within accept-able bounds and if then the proposed control strategyguarantees that approaches with time exponentiallyfast.
REFERENCES
[1] C. H. Papadimitriou and J. N. Tsitsiklis, “The complexity of optimalqueueing network control,” Math. Oper. Res., vol. 24, no. 2, pp. 293–305,May 1999.
[2] V. Jacobson, “Congestion avoidance and control,” in Symp. Proc.Communications Architectures and Protocols, Stanford, CA, 1988, pp.314–329.
[3] W. Stevens, “TCP Slow Start, Congestion Avoidance, Fast Retransmitand Fast Recovery Algorithms,” Network Working Group, RFC 2001,1997.
[4] P. Karn and C. Partridge, “Improving round-trip time estimates inreliable transport protocol,” in Proc. ACM Workshop on Frontiers inComputer Communications Technology, Stowe, VT, Oct. 1987, pp.2–7.
[5] W. Stevens, TCP/IP Illustrated, Volume 1, The Protocols. Reading,MA: Addison-Wesley, 1994.
[6] V. Jacobson, R. Braden, and D. Borman, “TCP Extensions for High Per-formance,” Network Working Group, RFC 1323, 1992.
[7] L. Brakmo and L. Peterson, “TCP Vegas: End to end congestion avoid-ance on a global Internet,” IEEE J. Select. Areas Commun., vol. 13, no.8, pp. 1465–1480, Oct. 1995.
[8] “Traffic Management Specification Version 4.0,” ATM Forum, Tech.Rep. AF-TM-0056.000, 1996.
[9] L. Roberts, “Enhanced PRCA (Proportional Rate Control Algorithm),”ATM Forum, Tech. Rep. AF-TM 94-0735R1, 1994.
[10] R. Jain, S. Kalyanaraman, R. Goyal, S. Fahmy, and R. Viswanathan,“Erica Switch Algorithm, A Complete Description,” ATM Forum,AF/96-1172, 1996.
[11] P. Newman, “Backward explicit congestion notification for ATM localarea networks,” in Proc. GLOBECOM’93, 1993, pp. 719–723.
[12] S. Shenker, L. Zhang, and D. D. Clark, “Some observation on the dy-namics of a congestion control algorithm,” Comput. Commun. Rev., pp.30–39, Oct. 1990.
[13] J. Martin and A. Nilsson, “The Evolution of Congestion Cotnrol inTCP/IP: From Reactive Windows to Preventive Flow Control,” NorthCarolina State Univ., TR-97/11, 1997.
[14] T. V. Lakshman and U. Madhow, “The performance of TCP/IP fornetwroks with high bandwidth delay products and random loss,”IEEE/ACM Trans. Networking, vol. 5, no. 3, pp. 336–350, Jun. 1997.
[15] A. Feldmann, A. C. Gilbert, and W. Willinger, “Data networks as cas-cades: Investigating the multifractal nature of Internet wan traffic,” inProc. ACM SIGCOMM ’98 Conf. Applications, Technologies, Archi-tectures, and Protocols for Computer Communication, Vancouver, BC,Canada, 1998, 1-58113-003-1 , pp. 42–55.
[16] A. Feldmann, A. C. Gilbert, P. Huang, and W. Willinger, “Dynamics ofIP traffic: A study of the role of variability and the impact of control,”in Proc. ACM SIGCOMM ’99 Conf. Applications, Technologies, Archi-tectures, and Protocols for Computer Communication, Cambridge, MA,1999, 1-58113-135-6, pp. 301–313.
[17] C. E. Rohrs, R. A. Berry, and S. J. O’Halek, “A control engineer’s lookat ATM congestion avoidance,” in Proc. GLOBECOM’95, 1995.
[18] A. Segall, “The modeling of adaptive routing in data communicationnetworks,” IEEE Trans. Commun., vol. 25, no. 1, pp. 85–95, Jan.1977.
[19] S. Keshav, “A control-theoretic approach to flow control,” SIGCOMMComput. Commun. Rev., vol. 25, no. 1, pp. 188–201, 1995.
[20] L. Benmohamed and S. M. Meerkov, “Feedback control of congestionin packet switching networks: The case of a single congested node,”IEEE/ACM Trans. Networking, vol. 1, no. 6, pp. 693–708, Dec. 1993.
[21] L. Benmohamed and Y. T. Yang, “A control-theoretic ABR explicit ratealgorithm for ATM switches with per-vc queueing,” in Proc. IEEE IN-FOCOM, vol. 1, 1998, pp. 183–191.
[22] A. Kolarov and G. Ramamurthy, “A control theoretic approach to thedesign of an explicit rate rate controller for ABR service,” IEEE/ACMTrans. Networking, vol. 7, no. 5, pp. 741–753, Oct. 1999.
[23] A. Pitsillides and J. Lambert, “Adaptive connection admission and flowcontrol: Quality of service with high utilization,” in Proc. IEEE IN-FOCOM, vol. 1, 1994, pp. 1083–1091.
[24] A. Pitsillides and J. Lambert, “Adaptive congestion control in ATMbased networks: Quality of service with high utilization,” J. Comput.Commun., vol. 20, pp. 1239–1258, 1997.
[25] A. Pitsillides, A. Sekercioglou, and G. Ramamurthy, “Effective con-trol of traffic flow in ATM networks using fuzzy explicit rate marking(FERM),” IEEE J. Select. Areas Commun., vol. 15, no. 2, pp. 209–225,Feb. 1997.
[26] Y. C. Liu and C. Douligeris, “Rate regulation with feedback controllerin ATM networks-a neural network approach,” IEEE J. Select. AreasCommun., vol. 15, no. 2, pp. 200–208, Feb. 1997.
[27] A. Pitsillides and A. Sekercioglu, Congestion Control in ComputationalIntelligence in Telecommunications Networks, W. Pedrycz and A. V.Vasilakos, Eds. Cleveland, OH: CRC Press, 2000, pp. 109–158.
[28] A. Pitsillides and P. Ioannou, “Combined nonlinear control of flow rateand bandwidth for for virtual paths in ATM based networks,” in Proc. 3rdIEEE Mediterranean Symp. New Directions in Control and Automation,Limassol, Cyprus, Jul. 1995.
[29] A. Pitsillides, P. Ioannou, and D. Tipper, “Integrated control of connec-tion admission, flow rate and bandwidth for ATM based networks,” inProc. IEEE INFOCOM, vol. 2, Mar. 1996, pp. 785–793.
[30] A. Sekercioglu, A. Pitsillides, and P. Ioannou, “A simulation study on theperformance of integrated switching strategy for traffic management inATM networks,” in Proc. IEEE Symp. Computers and Communications(ISCC’98), Jun. 1998, pp. 13–18.
[31] P. Ioannou and J. Sun, Robust Adaptive Control. Englewood Clliffs,NJ: Prentice-Hall, 1996.
[32] R. Braden, V. Jacobson, and S. Shenker, “Integrated Services in the In-ternet Architecture: An Overview,” Network Working Group, RFC 1633,1994.
[33] D. Black, S. Blake, M. Carlson, E. Davies, Z. Wang, and W. Weiss,“An Architecture for Differentiated Services,” Network Working Group,RFC 2475, 1998.
[34] J. F. Kurose and K. W. Ross, A Top Down Approach Featuring the In-ternet. Reading, MA: Addison-Wesley, 2000.
[35] D. Black et al., “Recommendations on Queue Management and Con-gestion Avoidance in the Internet,” Network Working Group, RFC 2309,1998.
[36] S. Floyd and V. Jacobson, “Random early detection for congestionavoidance,” IEEE/ACM Trans. Networking, vol. 1, no. 4, pp. 397–413,Aug. 1993.
[37] K. K. Ramakrishnan and S. Floyd. (1998) A Proposal to Add ExplicitCongestion Notification (ECN) to IP. Internet Engineering Task Force.[Online]. Available: draft-kksjf-ecn-03.txt
[38] K. K. Ramakrishnan, B. Davie, and S. Floyd. (1999) A Proposal to Incor-porate ECN in MPLS. Internet Engineering Task Force. [Online]. Avail-able: draft-mpls-ecn-00.txt
[39] S. Floyd and K. Fall, “Promoting the use of end-to-end congesion con-trol in the Internet,” IEEE/ACM Trans. Networking, vol. 7, no. 4, pp.458–472, Aug. 1999.
[40] C. Hollot, V. Misra, D. Towsly, and W. Bo Gong, “Control TheoreticAnalysis of RED,” Univ. Massachusetts, CMPSCI Tech. Rep. TR 00-41,2000.
[41] V. Jacobson, K. Nichols, and K. Poduri, “An Expedited ForwardingPHB,” Network Working Group, RFC 2598, 1999.
[42] J. Heinamen, F. Baker, W. Weiss, and J. Wroclawski, “Assured For-warding PHB Group,” Network Working Group, RFC 2597, 1999.
[43] R. Satyavolu, K. Duvedi, and S. Kalyanaraman, “Explicit Rate Controlof TCP Applications,” ATM Forum, ATM Forum/98-0152R1, 1998.

PITSILLIDES et al.: ADAPTIVE NONLINEAR CONGESTION CONTROLLER FOR A DIFFERENTIATED-SERVICES FRAMEWORK 107
[44] A. Almeida and C. Belo, “Explicit rate congestion control with binarynotifications,” in Proc. 10th IEEE Workshop on Local and MetropolitanArea Networks (LANMAN), Sydney, Australia, Nov. 1999.
[45] D. Tipper and M. K. Sundareshan, “Numerical methods for modelingcomputer networks under nonstationary conditions,” IEEE J. Select.Areas Commun., vol. 8, no. 6, pp. 1682–1695, Dec. 1990.
[46] C. Agnew, “Dynamic modeling and control of congestion-prone sys-tems,” Oper. Res., vol. 24, no. 3, pp. 400–419, 1976.
[47] J. Filipiak, Modeling and Control of Dynamic Flows in CommunicationNetworks. New York: Springer-Verlag, 1988.
[48] S. Sharma and D. Tipper, “Approximate models for the study of non-stationary queues and their application to communication networks,”in Proc. IEEE Int. Conf. Communications (ICC’93), May 1993, pp.352–358.
[49] X. Gu, K. Sohraby, and D. R. Vaman, Control and Performance inPacket, Circuit and ATM Networks. Norwell, MA: Kluwer, 1995.
[50] D. Anick, D. Mitra, and M. Sondhi, “Stochastic theory of data handlingsystem and multiple sources,” Bell Syst. Tech. J., vol. 61, pp. 1871–1894,1982.
[51] Y. Wardi and B. Melamed, “Continuous flow models: Modeling simula-tion and continuity properties,” in Proc. 38th Conf. Decision and Con-trol, vol. 1, Dec. 1999, pp. 34–39.
[52] L. Rossides, A. Pitsillides, and P. Ioannou, “Non-Linear CongestionControl: Comparison of a Fluid-Flow Based Model with OPNET,” Univ.Cyprus, TR-99-1, 1999.
[53] J. C. Bolot and A. U. Shankar, “Analysis of a fluid approximation toflow control dynamics,” in Proc. IEEE INFOCOM, May 1992, pp.2398–2407.
[54] B. Vandalore, R. Jain, R. Goyal, and S. Hahmy, “Design and analysisof queue control functions for explicit rate switch schemes,” in Proc.IC3N’8, 1998, pp. 780–786.
[55] K. Kawahara, Y. Oie, M. Murata, and H. Miyahara, “Performance anal-ysis of reactive congestion control for ATM networks,” IEEE J. Select.Areas Commun., vol. 13, no. 4, pp. 651–661, May 1995.
[56] B. Maglaris, D. Anastassiou, P. Sen, G. Karlsson, and J. Robbins, “Per-formance models of statistical multiplexing in packet video communi-cations,” IEEE Trans. Commun., vol. 36, no. 7, pp. 834–844, Jul. 1988.
Andreas Pitsillides (M’89) received the B.Sc. (Hns)degree from the University of Manchester Instituteof Science and Technology (UMIST), Manchester,U.K., and the Ph.D. degree from Swinburne Univer-sity of Technology, Melbourne, Australia, in 1980and 1993, respectively.
From 1980 to 1986, he worked in industry(Siemens and Asea Brown Boveri). In 1997, hejoined Swinburne University of Technology andin 1994, the University of Cyprus, where he iscurrently Associate Professor in the Department
of Computer Science and Chairman of the Cyprus Academic and ResearchNetwork (CYNET). In 1992, he spent a six month period as an academic visitorat the Telstra (Australia) Telecom Research Labs (TRL). His research interestsinclude fixed and wireless/cellular Integrated Services Networks, congestioncontrol and resource allocation, computational intelligence and nonlinear con-trol theory and its application to solve telecommunication problems, InternetTechnologies and their application in Mobile e-Services, e.g., in Tele-Health-care. He is the author of over 110 research papers. He is also a member ofthe IFIP working group WG 6.3. He participates in European Commissionand locally funded research projects, has presented invited lectures at majorresearch organizations, and has given short courses at international conferencesand short courses to industry. He is also widely consulted by industry.
Dr. Pitsillides regularly serves on international conference technical commit-tees, as a journal guest editor, and as a reviewer for conference and journal sub-missions. Among others, he has served as the Chairman of the EuroMedNet’98Conference, and on the executive committee of the IEEE INFOCOM 2001,2002, and 2003 (International Vice Chair).
Petros Ioannou (S’80–M’83–SM’89–F’94) re-ceived the B.Sc. degree (first class honors) fromUniversity College, London, U.K., and the M.S.and Ph.D. degrees from the University of Illinois,Urbana, in 1978, 1980, and 1982, respectively.
In 1982, he joined the Department of ElectricalEngineering Systems, University of SouthernCalifornia, Los Angeles, where he is currently aProfessor and the Director of the Center of AdvancedTransportation Technologies. His research interestsare in the areas of adaptive control, neural networks,
nonlinear systems, vehicle dynamics and control, intelligent transportationsystems, and marine transportation. He was Visiting Professor at the Universityof Newcastle, Australia, in the fall 1988, the Technical University of Cretein summer 1992, and served as the Dean of the School of Pure and AppliedScience at the University of Cyprus in 1995. He is the author/coauthor of fivebooks and over 150 research papers in the area of controls, neural networks,nonlinear dynamical systems and intelligent transportation systems.
Dr. Ioannou has been an Associate Editor for the IEEE TRANSACTIONS
ON AUTOMATIC CONTROL and the International Journal of Control andAutomatica. He is currently an Associate Editor of the IEEE TRANSACTIONS
ON INTELLIGENT TRANSPORTATION SYSTEMS, Associate Editor at Large ofthe IEEE TRANSACTIONS ON AUTOMATIC CONTROL, Member of the ControlSystem Society on IEEE ITS Council Committee and Vice-Chairman of theIFAC Technical Committee on Transportation Systems. He was a recipient ofthe Outstanding IEEE Transactions Paper Award in 1984, and the recipient ofa 1985 Presidential Young Investigator Award.
Marios Lestas (S-00) received the B.A. degreein electrical and information engineering and theM.Eng. degree in control engineering from the Uni-versity of Cambridge, U.K., in 2000. He joined theUniversity of Cyprus as a Ph.D. candidate in August2000, and also worked for the EC funded SEACORNproject. Since September 2001, he has continued hisPh.D. work at the University of Southern California,Los Angeles.
His research interests include application ofnonlinear control theory and optimization methods
in computer networks.
Loukas Rossides (S’97) received the B.Sc. andM.Sc. degrees from the University of Cyprus in 1997and 2001, respectively.
He is a Network Administrator at Cyprus Telecom-munications Authority (Cy.T.A.), Nicosia, Cyprus,where he designs and implements the company’snetwork.