Embed Size (px)
Citation preview

60 GHz Synthetic Aperture Radar for Short-RangeImaging: Theory and Experiments
B. Mamandipoor(1), G. Malysa(2) , A. Arbabian(2), U. Madhow(1) and K. Noujeim(3)
(1) ECE Department, University of California, Santa Barbara, CA, USA(2) EE Department, Stanford University, Stanford, CA, USA
(3) Microwave Measurements Division, Anritsu Co., Morgan Hills, CA, USAEmails: {bmamandi, madhow}@ece.ucsb.edu
{gmalysa, arbabian}@stanford.edu, [email protected]
Abstract—We report on experimental results, and associatedtheory, for a 60 GHz synthetic aperture radar (SAR) testbedfor short-range (sub-meter) imaging. Our testbed consists of amonostatic radar with synchronized transmitter and receiver,with lateral motion (over 10-30 cm) providing the SAR geometry,and range resolution provided by stepped frequency continuouswave (SFCW) signals covering a band exceeding 6 GHz. Sub-centimeter (cm) level resolution is achieved in both cross-rangeand slant-range. For stationary targets, platform movementprovides a means of emulating a system with multiple monostatictransceivers, and exploring the impact of the spatial distributionof such transceivers. In particular, sparse spatial sampling causessignificant deterioration in cross-range resolution under classicalSAR image reconstruction, which is based on a point scatterersignal model. We show that performance can be greatly improvedby modeling objects using “patches,” where a patch is defined asa continuum of point scatterers with (approximately) the samereflectivity. Estimation-theoretic quantities such as the Cramer-Rao Lower Bound (CRLB) and normalized cross-correlationbetween responses for nearby targets, are derived for both point-and patch-based signal models.
I. INTRODUCTION
Active short-range mm-wave systems have a wide range ofapplications including medical imaging, security scanning, au-tonomous vehicle navigation, and human gesture recognition.Recent advancements in silicon technology offer the possibil-ity of realizing low-cost and highly integrated imaging systemsin mm-wave (between 30 and 300 GHz) and beyond [1]. Radarimagers can be used as an alternative or complementary sensorto optical imagers. One of the main advantages of radar im-agers is direct accessibility to range and Doppler information,which can be used in 3D image reconstruction and multi-targettracking applications. Robustness against weather and lightingconditions and the possibility of electronic beam-steering areother attractive properties of radar imagers.
There are various demonstrations of mm-wave imagersfor different applications. For instance, [2] presents a multi-static, broadband stepped frequency continuous wave (SFCW)radar architecture for concealed weapon detection at airportsecurity checkpoints. Other demonstrations targeting the sameapplication are [3], [4], [5]. Another application is the use ofmm-wave radar as a human gesture interface. A pulsed-radartransceiver is demonstrated in [6].
Our goal in this paper is to explore the limits of mm-waveradar when the radar transceivers are constrained to be locatedon a surface with relatively small form factor (e.g., a smartphone or a tablet computer), and the range of interest is of theorder of a meter or less. Our focus here is on understandingthe fundamentals of achievable resolution in this scenario, asa function of hardware and geometry constraints, but it isworth mentioning that one possible application is in gesturerecognition.Why 60 GHz? Moving to higher frequencies provides us withthe temporal and spatial degrees of freedom that we needfor high resolution imaging. Increased bandwidth availabilityenhances range resolution by increasing the degrees of free-dom in the time-frequency domain. Cross-range resolution isenhanced by the increase in the number of spatial degreesof freedom for a constrained form factor. In particular, resultsderived in the context of communication [7] indicate (althoughdetailed computations remain to be performed for radar appli-cations) that the number of spatial degrees of freedom scalequadratically with the carrier frequency (for a 2D array withfixed form factor). The 60 GHz band is therefore an attractivecandidate: 7 GHz of spectrum available at a high carrierfrequency on an unlicensed basis.Monostatic architecture: In terms of hardware choices, wehave considered the monostatic architecture because of thesimplicity of maintaining synchronization between a colocatedtransmitter and receiver. A monostatic architecture also scaleseasily, with only loose requirements on synchronization: ageneric approach to imaging is to spread such transceiversover available surfaces as constrained by cost and form factor(whether it is a handheld or a television or a car), and thenfusing the information that they gather.Overview of the results: We point out that the geometry ofshort-range range imaging is quite different from that of long-range imaging in which even large objects can be modeledas point scatterers. For a handheld form factor at sub-meterranges, our experimental and theoretical results indicate thatthe attainable cross-range resolution is of the order of sub-centimeter using a dense array of monostatic transceivers and abandwidth of several GHz implemented via SFCW waveforms.For a given bandwidth and form factor, we have looked at the

impact on performance of significantly reducing the number oftransceivers (spreading them over the allowable form factor),thereby constraining the available degrees of freedom. Theresults indicate a significant degradation in resolution of theSAR image with sparse spatial sampling. It is shown thatin order to combat this dimension starvation in the signalspace, we need to go beyond the point scatterer signal modeland look at objects as a continuum of point scatterers, whichwe name as patch objects. Both experimental and theoreticalresults indicate that patch modelling enables the sparse arrayto maintain resolution, at least for simple scenes which can beefficiently characterized by patch objects.Outline: The organization of the paper goes as follows. InSection II we briefly describe our prototype and report onexperimental results for imaging a simple scene consisting twoadjacent metallic plates, using both dense and sparse mono-static arrays. The results show that using a patch object ratherthan a point scatterer as the primitive for the signal model,gives superior performance comparing to traditional SARprocessing. In Section III, we compute estimation-theoreticquantities for both point and patch signal models, that shedlight on achievable resolution. Concluding remarks and futurework are included in Section IV.
II. EXPERIMENTAL RESULTS
Our hardware testbed is an SFCW radar in the 54 GHz to60.75 GHz band, built using Nonlinear Transmission Lines(NLTL) and dual high-gain horn antennas [8]. The transceivermoves in the direction parallel to the imaged scene in (1 mm)steps. The travel distance of the imager is of the order of theform factor of a portable handheld device (∼ 15 cm). Thiscould emulate a number of monostatic transceivers placed onsuch a device. Of course, the number used here (correspondingto the number of locations, 150) is too large, but our goalis to determine first the effect of device form factor onresolution, and then to explore the effect of the sparser spatialsampling that might be used in practice. At each step ofmovement, complex reflection coefficients corresponding to aset of N = 150 frequencies spaced ∆f = 45 MHz apart, aremeasured and stored in a vector Cx ∈ CN , where CN is theset of N -dimensional complex vectors. The range resolution inSFCW radar is ∆r = c
2N∆f = c2BW (∼ 2cm) and maximum
unambiguous range is r = c2∆f (∼ 3m), where c is the speed
of light and BW denotes the total bandwidth [11].The front end processing involves two-stage matched filter-
ing. Using the received samples at a given transceiver location,matched filtering with respect to the range can be accom-plished using the Inverse Fourier Transform. After mappingthe vector of reflection coefficients to its equivalent complexrange profile in this manner, we perform “SAR focusing,”or matched filtering against the expected response to eachpossible scatterer as a function of transceiver location.
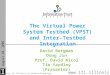
Figure 1 shows the results of this procedure when imagingtwo closely spaced metallic objects (0.5 cm gap), with andwithout SAR focusing. Clearly, the latter is critical. If weonly rely on the directionality of the horn antennas at a given
!"#$%&'()*#+),'-".'
!!"#
!"$
!"%
!"&
'!
!"!(
!"'
)
*+,)*+-./)0+1+
*+-./)23-4)567)8!"!###!9)4:+;3-.<
)
=6+./>)?@;+13@-)567)8!"!!'!!!)4:+;3-.<
%%
%$
%#
%!
(&
(%
($
(#
(!
$&
(a) Raw range profiles
!"#$%&'()*#+),'-".'
!!"#
!"$
!"%
!"&
'!
!"!(
!"'
)
*+,),-./01234.25/0)/6)*.-0-
,708-)9501):;<)=!"!###!>)1?7.508@
)
A;78-3)B/.725/0):;<)=!"!!'!!!)1?7.508@
$!
C(
C!
#(
#!
(b) With SAR focusing
Fig. 1: Experimental results from imaging two closelyspaced metallic objects using an array of 150 elements.
location, we obtain a lateral resolution of several cm [8]. SARfocusing improves this to less than 1 cm.
In practice, we have strict limitations in terms of cost andcomplexity of the system, hence we need to resort to muchsparser arrays than the 150 elements emulated in the precedingexperiment. Figure 2 shows the result of SAR processingfor the same scene of metallic objects, when deploying only15 equispaced elements of the array. It is evident that thisprocedure fails to improve the cross-range resolution, andwe are not able to identify the metal plates and the smallgap between them. Intuitively, this is because SAR process-ing models each target as a point scatterer, but this modelbreaks down in short- and medium-range applications (e.g.,gesture recognition using millimeter wave radar implementedon a handheld, or vehicular radar imaging in crowded cityenvironments), where an object is more accurately modeledas a continuum of point scatterers. For a sparse array, thereare simply not enough spatial degrees of freedom to combatthe “self-interference” in the responses to this continuum ofscatterers.
In view of the limitations of conventional SAR, we pro-

!!"#
!"$
!"%
!"&
'!
!"!(
!"'
)
*+,-.+/)012)34)5+6)7+-+))892-+):3;.4.2;)<=5)>+?
5+@A2)B.@1)C>D)E!"!###!F)1?+G.@AH
)
I>+A2,)/3G+-.3@)C>D)E!"!!'!!!)1?+G.@AH
%!
((
(!
$(
$!
!"#$%&'()*#+),'-".'
Fig. 2: Experimental results for a sparse array (15 elements)from imaging two closely spaced metallic objects: SAR
processing.
pose an alternative approach based on a more sophisticatedprimitive, in order to reduce the effective number of targetsto be imaged below the dimension of the radar signal space,which is limited by parameters such as bandwidth and formfactor. Specifically, we develop a patch model for a continuumof point scatterers, assuming that the patch size is smallenough to approximate the reflectivity as constant across allconstituent scatterers. This parsimonious model signal model,with appropriately designed estimation algorithms, allows usto “super-resolve” beyond the limits of conventional radartheory.
Fig. 3: Experimental results for a sparse array (15 elements)from imaging two closely spaced metallic objects: Patch
detection algorithm.
For example, the simple scene of metallic objects in ourexperiment, can be described by only two patch objects. Notethat each patch is completely characterized by two parameters:width and center. Therefore, one direct consequence of patchmodeling is that the description of the scene will be “sparse”in the dictionary of patch responses for the desired parameterspace. Such sparse explanation gives us the opportunity ofleveraging ideas from compressed sensing (CS) to recover
the patch objects nested in the scene. Figure 3 shows theoutput of a sequential patch detection algorithm inspired byOrthogonal Matching Pursuit algorithm [10]. The descriptionof the algorithm has been omitted due to lack of space and willappear in future publications. We see that the algorithm is ableto perfectly reconstruct the scene after a few iterations using15 array elements. Next, we investigate estimation theoreticproperties of both point-scatterer and patch object signalmodels.
We note that there is significant recent interest in applyingcompressive techniques to radar using the conventional pointscatterer model, with the goal of sampling at the informationrate rather than at the Nyquist rate [9]. This is consistent inphilosophy with our approach of using model-based estimationto make better use of the available dimensions, but we developtarget primitives that go beyond the point scatterer model.
III. ESTIMATION-THEORETIC PROPERTIES
A. Point-scatterer model
x
D
L
xA
diA
i
Fig. 4: Model of mono-static array with point-scatterer A atposition xA
Consider the geometry depicted in Figure 4. In the resultsreported here, we restrict attention to exploring how the SARgeometry (or equivalently, the device form factor) impactscross-range resolution, hence we consider CW rather thanSFCW signaling: even at the shorter ranges we consider, rangeestimates based on using larger bandwidth carry relatively littlecross-range information. The signature corresponding to thepoint object in Figure 4 is given by
µi(xA) = e−j4πfcdiA/c, i ∈ {1, 2, . . . ,K}
where diA is the distance from the object to the ith elementsof the array. We set the model parameters to D = 30 cm,K = 150 and 15, and the length of the array aperture L = 15cm.
Using this model, we compute the CRLB (assuming Gaus-sian noise, white across frequencies and transceiver locations)for estimating the location of two point-objects, located atxA and xB , and at a fixed distance D from the array.Corresponding to each object, we assume an unknown phasechange introduced to the reflected signal, which is independentof the angle of incidence. Therefore, the vector of unknownparameters is extended to include point-object locations andtheir corresponding phase changes. It can be shown that the

Fisher information matrix for this scenario is a function of xA,xB and the difference between phase changes introduced bythe two point-objects, denoted by φ. We have calculated thesquare root of CRLB for estimating xA from the observations,where signal to noise ratio (SNR) is 10 dB, φ = π/4 andCRLB values are normalized by λ2. Figure 5(a) shows abouta centimeter resolution for distinguishing between the twopoints for an array of 150 elements. Sparsifying the array bya factor of 10 introduces ambiguities in estimating xA, evenwhen xB is not in the vicinity of it, as shown in Figure 5(b).This ambiguity is a consequence of under-sampling in space.
Xb [cm]-8 -6 -4 -2 0 2 4 6 8
sq
rt(C
RL
B)
for
Xa
(n
orm
aliz
ed
by la
mb
da
)
0.07
0.08
0.09
0.1
0.11
0.12
0.13
0.14
0.15
0.16sqrt(CRLB) for estimating Xa when Xa is fixed at 2 [cm]
(a) 150 array elements
Xb [cm]-8 -6 -4 -2 0 2 4 6 8
sqrt
(CR
LB
) fo
r X
a (
norm
aliz
ed b
y lam
bda)
0.07
0.08
0.09
0.1
0.11
0.12
0.13
0.14
0.15
0.16sqrt(CRLB) for estimating Xa when Xa is fixed at 2 [cm]
(b) 15 array elements
Fig. 5: Two slices of the CRLB for estimating xA, whenxA = 2cm is fixed.
We also consider the normalized correlation between thesignature corresponding to a point xA against those corre-sponding to other points along a line parallel to the array, andat a distance D from it. The transmitted signal is SFCW withthe same parameters as in the experimental setup. Figure 6(a)shows results for xA = 0 cm and K = 150. The size of themain lobe again indicates a resolution of about a cm for bothomnidirectional and directional (main beam ≈ 20 degrees)antennas. Figure 6(b) shows that for K = 15, the response ofthe point scatterer at xA = 0 becomes highly correlated withthe signatures of point scatterers far away from the centerof the array. As we shall see, this leads to ambiguities forextended objects comprising infinitely many point scatterers.Note that the effective decrease in the number of degrees offreedom for directional receive antennas results in significantdeterioration of lateral resolution as we move away from thecenter of the array. The reason is that the point scatterers close
to the edge of the array can be seen by only a small fractionof the directional antennas.
−8 −6 −4 −2 0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Point−Object Position: [0 cm]
Grid Points (cm)
Norm
aliz
ed C
orr
ela
tion
Omnidirectional antennaDirectional antenna
(a) 150 element array
−8 −6 −4 −2 0 2 4 6 80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Grid Points [cm]
Norm
aliz
ed C
orr
ela
tion
Point−Object Position: [0 cm]
Omnidirectional antennaDirectional antenna
(b) 15 element array
Fig. 6: Normalized correlations for a point scatterer atxA = 0
B. Patch-based model
We first introduce the patch model, and then compute asso-ciated estimation-theoretic quantities such as the CRLB andnormalized correlations between noiseless received signals.Consider the geometry depicted in Figure 7. We considera one-dimensional patch uniquely identified by its startingand ending points, denoted by xA and xB , respectively.Alternatively, we can use centre O , (xA +xB)/2 and widthW , xB−xA to identify the same patch. A key approximationinherent in this primitive is that the reflectivity is constantacross the patch (thus, we must choose our nominal patchsize small enough that this approximation is valid). Similar tothe analysis for point scatterer, we consider CW rather thanSFCW for CRLB analysis. The response at ith element of thearray is given by
si(xA, xB) =
∫ xB
xA
e−j4πfcc dixdx.
The received signal power at ith element is Pi =|si(xA, xB)|2, and the total received power P =
∑Ki=1 Pi.
The K × 1 array response is modeled as
y = s(xA, xB) + z,
where z ∼ CN (0, 2σ2IK) denotes additive complex Gaussiannoise. The Fisher information matrix for estimating xA and

x
D
L
xA xB
dix
i
Fig. 7: Model of mono-static array with patch objectextended from xA to xB
xB is given by
F (xA, xB) =1
σ2
K −Σi cos(
4πλ (diA − diB)
)−Σi cos
(4πλ (diA − diB)
)K
.
−10−5
05
10
0
5
10
150
0.5
1
1.5
2
O [cm]
sqrt(CRLB) for W (normalized by lambda)
W [cm]
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
(a) 150 element array
−10−5
05
10
0
5
10
150
0.5
1
1.5
2
O [cm]
sqrt(CRLB) for W (normalized by lambda)
W [cm]
0
1
2
3
4
5
6
(b) 15 element array
Fig. 8: CRLB for the width of a patch object
We can use F (xA, xB) to find CRLB for the variance of anyunbiased estimator of a linear combination of xA and xB usingthe following well-known fact: for a ∈ Rα, the CRLB for aT θis given by aTF−1(θ)a, where F (θ) is the Fisher informationmatrix for α-dimensional parameter vector θ. We use this tocalculate the CRLB for estimation of the width W and centerO for a patch. We set the model parameters to D = 30 cm,
K = 150 and 15, and length of the array L = 15 cm. Sincewe are interested in the effect of form factor on the estimationbounds, we fix the SNR = 10 dB for the entire parameterspace. Figure 8 shows the square root of normalized CRLBfor estimating W . We see that sparsifying the array causesambiguity in only a small portion of the parameter space(similar observations hold for the CRLB for estimating O).To better see how these bounds compare to one another, wefix the center at O = 0 cm, and calculate CRLB for differentvalues of W . Figure 9 shows that CRLB for K = 15, closelyfollows the bound for K = 150. Therefore, for a fixed SNR,sparsifying the array does not lead to fundamental ambiguitiesfor estimating the parameters of a patch object within a largefraction of the parameter space.
W [cm]0 5 10 15
sq
rt(C
RL
B)
for
W (
no
rma
lize
d b
y la
mb
da
)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8O is fixed at 0 [cm]
K = 150
K = 15
Fig. 9: Comparing CRLB of W for K = 150 and 15.
We also look at normalized correlations and compare theresults for point- and patch-based signal models. To this end,let us construct two inventories of responses: (1) the inventoryof signatures corresponding to point scatterers along a lineparallel to the array, and at a distance D = 30 cm from it;(2) the inventory of signatures corresponding to patch objectshaving a nominal width Wnom = 1 cm, along the same lineparallel to the array. The transmitted signal is SFCW with thesame parameter as the experimental setup.
Grid Points (cm)-8 -6 -4 -2 0 2 4 6 8
Norm
aliz
ed C
orr
ela
tion
0
0.2
0.4
0.6
0.8
1
Inventory of point responsesdata2Inventory of patch responsesPatch object in front of the arrayArray elements
Fig. 10: Normalized correlations for a single patch (O = 0,and W =Wnom = 1 cm)

Figure 10 shows the result of the correlations of a patchresponse whose width is exactly equal to Wnom, against thetwo inventories of responses that we have constructed. Thesize of the main lobe again indicates a resolution of about acm for both inventories. However, the mainlobe to sideloberatio for the patch inventory is much larger (i.e., better) thanthat for the point inventory.
Grid Points (cm)-8 -6 -4 -2 0 2 4 6 8
Norm
aliz
ed C
orr
ela
tion
0
0.2
0.4
0.6
0.8
1 Inventory of point responsesdata2Inventory of patch responsesPatch object in front of the arrayArray elements
(a) Wide patch
Grid Points (cm)-8 -6 -4 -2 0 2 4 6 8
Norm
aliz
ed C
orr
ela
tion
0
0.2
0.4
0.6
0.8
1
(b) Interfering patches
Fig. 11: Normalized correlations for (a) a wide patch withW >Wnom, and (b) multiple patches
The advantage of the patch-based model becomes moreobvious when the scene contains wider patches, or multiplepatches interfering with each other. Figure 11(a) show theresult of correlations for a patch with W = 5 cm. Wesee that correlations against the patch inventory are able todescribe the scene very well, even though W > Wnom,whereas correlations against point signatures fails to providean unambiguous explanation of the scene. Figure 11(b) showsthe result of correlations for a scene consisting multiplepatches with different widths. We see that correlations againstpatch responses is much more robust against destructive inter-ference between signals from multiple objects. As shown inSection II, experimental results also indicate that correlationsagainst patch objects provide the required information to detectpatches, and to reconstruct simple scenes unambiguously.
IV. CONCLUSION
We have presented experimental and theoretical resultsshowing that it should be possible to obtain sub-cm resolutionusing mm wave radar implemented in handheld-sized formfactors, thus opening up interesting potential applications suchas gesture recognition. However, standard SAR processing,which is based on the classical point scatterer target model,deteriorates for sparse spatial sampling at short and mediumranges, because each object appears as a continuum of pointscatterers which are difficult to resolve with a limited numberof spatial degrees of freedom. We show, however, that ourproposed new patch-based primitive is effective in providinga sparse description of the scene. Super-resolution algorithmsbased on this primitive yield improved image reconstructionon our testbed, and estimation-theoretic computations providefurther support for the effectiveness of our approach.
Ongoing research includes incorporation of Doppler infor-mation for moving targets, extensive validation for more com-plex scenes in the context of specific applications, waveformdesign, performance/complexity comparisons with multistaticarchitectures, and low-power hardware design.
V. ACKNOWLEDGMENT
This work was supported in part by Systems on NanoscaleInformation fabriCs (SONIC), one of the six SRC STARnetCenters, sponsored by MARCO and DARPA.
REFERENCES
[1] S. S. Ahmed, A. Schiessl, F. Gumbmann, M. Tiebout, S. Methfessel,L. Schmidt, “Advanced Microwave Imaging,” Microvawe Magazine,IEEE, vol. 13, no. 6, pp. 26-43, Sep.-Oct. 2012.
[2] F. Gumbmann, L. Schmidt, “Millimeter-Wave Imaging With OptimizedSparse Periodic Array for Short-Range Applications,” Geoscience andRemote Sensing, IEEE Transactions on, vol.49, no.10, pp.3629-3638,Oct. 2011.
[3] K. B. Cooper, R. J. Dengler, N. Llombart, T. Bryllert, G. Chattopadhyay,E. Schlecht, J. Gill, Lee Choonsup, A. Skalare, I. Mehdi, P. H. Siegel,“Penetrating 3-D Imaging at 4- and 25-m Range Using a Submillimeter-Wave Radar,” IEEE Transactions on Microwave Theory and Techniques,vol.56, no.12, pp.2771,2778, Dec. 2008.
[4] A. D. Semenov, H. Richter, U. Bottger, A.V. Smirnov, H. -W. Hubers,“Distant detection of hidden objects with a THz imaging radar,” inProc. Infrared and Millimeter-waves, 2007 and the 2007 15th Int. Conf.Terahertz Electronics IRMMW-THz. Sept. 29, 2007, pp. 652-653.
[5] Schiessl, A.; Ahmed, S.S., “W-band imaging of explosive substances,”European Radar Conference, EuRAD 2009, pp.617-620, Sept. 30 2009-Oct. 2 2009.
[6] A. Arbabian, S. Callender, S. Kang, M. Rangwala, A. M. Niknejad, “A94 GHz mm-Wave-to-Baseband Pulsed-Radar Transceiver with Applica-tions in Imaging and Gesture Recognition,” IEEE Journal of Solid-StateCircuits, vol. 48, no. 4, pp.1055,1071, April 2010.
[7] E. Torkildson, U. Madhow, M. Rodwell, “Indoor Millimeter WaveMIMO: Feasibility and Performance,” IEEE Transactions on WirelessCommunications, vol.10, no.12, pp.4150-4160, December 2011.
[8] G. Malysa, A. Babveyh, K. Noujeim, A. Arbabian, “A Compact mm-Wave SFCW Radar Imager using Non-Linear Transmission Lines,”European Microwave Conference, EuMC 2014, to be published.
[9] R. Baraniuk and P. Steeghs, “Compressive radar imaging,” in Proc. 2007IEEE Radar Conf., Apr. 2007, pp. 128-133.
[10] T. Cai and L. Wang, “Orthogonal Matching Pursuit for Sparse SignalRecovery with Noise,” IEEE Transactions on Information Theory, vol.57, no. 7, pp. 4680-4688, 2011.
[11] D. R. Wehner, High Resolution Radar. Artech House. pp 197-209, 1987.[12] H. L. Van Trees, K. L. Bell, and Z. Tian, Detection, Estimation, and
Modulation Theory. John Wiley & Sons, 2013.