Embed Size (px)
Citation preview

5. Control de los SCEE
5.1. Introducción
Entre los principales objetivos del sistema de control del aerogenerador sepueden citar aspectos claves como la maximización de la energía extraída alviento a cada velocidad del mismo (optimización del rendimiento energético),la atenuación de las cargas mecánicas transitorias y el esfuerzo a fatiga, lareducción de armónicos eléctricos y �icker en la conexión a red, la calidad deonda y el control del factor de potencia de dicho punto, y la �abilidad delsistema global ante variación de parámetros (robustez) y eventos inespera-dos.Además, algunos problemas críticos a destacar, inherentes al proceso y suentorno, son: la necesidad de elementos adicionales de seguridad para podertrabajar con vientos de alta intensidad de turbulencia y velocidad extrema;la gran complejidad matemática del modelo del sistema, presente en formade fuertes no linealidades, carácter multivariable y variación de parámetrosen el tiempo; y la imposibilidad de medir directamente la velocidad del vientoque experimenta la turbina, debido a la alta incertidumbre en el anemómetroy la gran in�uencia del modelo de las palas sobre el mismo [59].
Los SCEE, dependiendo de su construcción tienen diferentes lazos decontrol. Entre los más importantes se encuentran: el control del cambio delángulo de paso, utilizado para regular la potencia de salida en la velocidaddel viento nominal o por encima de ella y para seguir una curva de poten-cia prede�nida en el arranque ó paro de la máquina; el Control del torquedel generador, que sirve para la regulación de la velocidad rotacional de losSCEE de velocidad variable; y el control de orientación (yaw control), el cualpermite encontrar la dirección en donde la velocidad del viento es máxima [3].
A continuación se presenta una revisión de los avances en diferentes méto-dos de control [4].
5.1.1. Control no lineal
La aplicación del control no lineal a los aerogeneradores está investigadaen [60] donde desarrolló un control no lineal que variaba continuamente, detal forma que el controlador siempre era el apropiado para la velocidad del
78

viento, aunque no fuera posible tener una medida directa del viento, la quedebía ser inferida. Se demostró que el control era robusto y se realizarondiferentes simulaciones que arrojaron como resultado un mejor desempeñofrente a controladores PI y controladores clásicos lineales, en particular, lareducción del tiempo de espera en niveles de potencia altos y como conse-cuencia una disminución de las cargas del sistema de transmisión mecánico.
Boukhezzar y Siguerdidjane, han presentado en [61] el diseño de contro-ladores no lineales con realimentación para el seguimiento de la referenciade velocidad del rotor, y con un estimador de la velocidad del viento y eltorque aerodinámico usando el �ltro de Kalman. Su objetivo fue maximizarla energía extraída del viento mientras se reducían las cargas mecánicas. Losmismos autores de [61] han propuesto en [62] una estrategia de control nolineal en cascada para un SCEE de velocidad variable y ángulo de paso con-stante. El lazo interno (lazo de velocidad) es la entrada y es controlada porel lazo externo (lazo de potencia) que consiste en el seguimiento de una po-tencia de referencia deseada. Esta estrategia de control fue validada en unsimulador de turbina eólica con resultados satisfactorios.
En [63] se presenta el diseño de un controlador para el régimen de pro-ducción de potencia constante, usando la teoría del control no lineal. Estealgoritmo fue aplicado para el ajuste del ángulo de paso en tiempo real bus-cando minimizar tanto la desviación de la velocidad del rotor de la deseada,así como el movimiento del actuador de cambio de ángulo de paso fuera eldeseado. En [64] se presenta una estrategia de control no lineal donde la ve-locidad del rotor es controlada a través del ajuste del voltaje del devanado deexcitación, con esto se obtiene mas potencia de salidas in involucrar otros as-pectos mecánicos complejos, adicionalmente, el controlador no requiere de lamedición ó estimación de la velocidad del viento. La e�cacia de esta estrate-gia de control propuesta en [64] está veri�cada por las simulaciones obtenidascon diversas condiciones de funcionamiento.
5.1.2. Control adaptativo
En [65] se ha desarrollado una combinación entre el control adaptativo y elcontrol no lineal para regular la velocidad del rotor, lo cual es necesario paraaumentar la e�ciencia de generación de potencia. Los algoritmos de controlse basaron en el modelamiento dinámico de los componentes mecánicos y
79

eléctricos del SCEE y fueron veri�cados por simulación en una turbina de ejehorizontal de dos aspas.En [66] y [66] se utilizó la técnica de control adaptativo para controlar eltorque del generador en la región 2 de su curva de potencia, con el objetivoprincipal de maximizar la extracción de energía de un SCEE de velocidadvariable y teniendo constante el ángulo de paso. Adicionalmente, evaluaronla estabilidad del controlador. [68] presenta el desarrollo del control del ángulode paso a través de la técnica de control adaptativo usando un regulador deautosintonía que tiene un método de identi�cación de mínimos cuadrados.Adicionalmente, realizaron algunas simulaciones variando los parámetros delSCEE y veri�caron que el método de control compensara la in�uencia de estavariación y nivelara la potencia de salida.
5.1.3. Control de ganacia programada
En [26] se ha propuesto un sistema de control de ganancia programa-da con el concepto de sistemas variantes de parámetros lineales (LPV delinglés Linear Parameter Varying) donde los objetivos principales son la max-imización de la e�ciencia de la conversión de energía eólica, la operación se-gura, el amortiguamiento de modos resonantes, la estabilidad y la robustez.Esta estrategia fue aplicada a un SCEE de velocidad variable. [69] presentauna estrategia de control que estabiliza al SCEE de velocidad variable entodos los puntos de operación por medio del método de ganancia programa-da, y además utilizando estimadores para obtener el torque aerodinámico yla velocidad rotacional. Este control adaptativo utiliza la técnica GaussianaCuadrática Lineal (LQG del inglés Linear Quadratic Gaussian). En [70] sedesarrolló una estrategia de control en la cual se identi�caron varias condi-ciones de operación del SCEE y fue diseñado un controlador cuadrático lineal(LQ del inglés Linear Quadratic) para cada punto de operación. Adicional-mente, como los estados y la variable de ganancia programada no están enlínea era necesario el diseño de un observador para la estimación de estadosy perturbaciones.
5.1.4. Control H∞
Otra estrategia de control avanzada es la técnica de control H∞. A contin-uación se revisan algunas investigaciones realizadas sobre el tema y aplicadasal control de los SCEE.
80

En [71] se presentó el desarrollo de un control H∞ para un SCEE develocidad variable y ángulo de paso ajustable con un modelo indeterminadopara trabajar en la zona de producción de potencia constante, con los resulta-dos de las simulaciones se comprobó que esta técnica mantiene la estabilidady tiene gran robustez. [72] presenta un diseño de un control basado en lametodología de H∞ para un SCEE controlado por stall en condiciones develocidad variable. Las funciones de peso son elegidas por el método de con-�guración de bucle. En [73] se presentó también un diseño de un controladorpara mantener constante el nivel de la potencia de salida de un SCEE porencima de la velocidad del viento nominal. Este control H∞ fue diseñado porel método de Desigualdad de Matrices Lineales y presenta buen desempeñoy robustez durante las simulaciones.En [74] se propuso un método de control que trabaja en un amplio rango develocidades conmutando entre 5 controladoresH∞ que fueron acondicionadosapropiadamente por medio de la aproximación de observadores. [75] presentauna estrategia de control multivariable que tiene como variables manipuladasal ángulo de paso y el torque del generador con el �n de obtener la máximae�ciencia de conversión de energía eólica reduciendo las cargas dinámicas.Adicionalmente, el modelo del SCEE es desarrollado y linealizado por unmétodo no convencional.
5.1.5. Control por redes neuronales
Las redes neuronales son otra técnica del control inteligente que se basa enla forma como trabaja el cerebro humano a través del aprendizaje automáticoy del entrenamiento. El control de los SCEE no ha sido ajena a esta técnicade inteligencia arti�cial y se han desarrollado diferentes controladores con unobjetivo común que es mejorar el desempeño de los SCEE. A continuaciónse revisan algunas investigaciones que han abordado el tema.
En [76] se mostraron las ventajas de la aplicación de una red neural parauna pequeña turbina eólica, en donde se veri�có la estimación rápida y pre-cisa de la velocidad del viento actual sin el uso del anemómetro y se observóque la potencia mecánica máxima puede ser obtenida en estado estable ydinámico. Adicionalmente, a la red neural se le agregó una función de com-pensación con el �n de evitar que el coe�ciente de potencia se desviara de suvalor óptimo.
81

En [77] se propuso una red neural con el �n de estimar el valor de la ve-locidad del viento sin la utilización de censores teniendo como entradas a lapotencia en el eje del generador y la velocidad angular de la turbina. Esta redfue implementada en una tarjeta FPGA (�eld-programmable gate array) yfueron realizadas diferentes simulaciones con una turbina eólica pequeña, conmejores resultados con respecto a métodos tradicionales. En [78] se empleóun sistema de control adaptativo basado en redes neuronales para el con-trol de SCEE de media escala en diferentes condiciones de operación. Estemétodo propuesto consistía de identi�cadores hacia adelante y hacia atrás,usados para modelar la dinámica del sistema en ambos sentidos, y adaptar losparámetros del controlador neural que es utilizado para entregar una señalde control al actuador del ángulo de paso. Los resultados de las simulacionesindicaron que esta estrategia de control propuesta es una gran contribuciónal campo del control en los SCEE. En [79] se desarrolló un controlador PIDpara el control del ángulo de paso por medio de redes neuronales utilizando elalgoritmo de aprendizaje supervisado Hebbina, para un SCEE de velocidadvariable y frecuencia constante de 1MW de potencia nominal.
5.1.6. Control de optimización
El control de optimización de un SCEE tiene varios objetivos, como elde maximizar la potencia de salida y minimizar las cargas aerodinámicas envelocidades de viento altas.
En [80] se presentó un esquema de control de seguimiento de potenciamáxima (MPPT del inglés Maximum Power Point Tracking) de histéresis elcual es independiente de las características de la turbina eólica y del gen-erador y es comparado con otros dos métodos, sin embargo sólo se llegó asimulaciones. Los mismos autores de [80], desarrollaron en [81] algoritmos deextracción de la potencia eólica máxima para SCEE basados en inversores.Particularmente, desarrollaron el algoritmo basado en el método de búsquedaHill-Climb avanzado, el cual tiene un proceso de entrenamiento en línea ybusca maximizar la potencia mecánica de la turbina a través de la detecciónde la potencia de salida y del voltaje de conexión dc del inversor.En [82] se presentó otro método de MPPT que no dependía de la medida dela velocidad del viento, y se obtuvo controlando la velocidad de un generadorsincrónico que utiliza un conversor ac-dc-ac entre el estator y la red eléctrica.
82

El control utiliza la manipulación del ángulo de disparo de los tiristores delinversor dcac.
En [83] se desarrolló una estrategia de control muy completa que apuntabaa los tres objetivos más importantes en el control de un SCEE: control delvoltaje local, obtención de la potencia máxima del viento y minimizaciónde las pérdidas de potencia en el generador de inducción. Esta estrategiade control utilizó un inversor y un recti�cador PWM que produce un trende pulsos con amplitud variable, tal que el valor medio (señal �ltrada) esproporcional a la señal deseada.
5.1.7. Control por lógica difusa
El control por lógica difusa emula la forma en que un ser humano tomadecisiones para controlar un proceso a través de una serie de reglas. En losSCEE esta técnica también ha sido aplicada y en las siguientes referencias sepresenta una revisión de las investigaciones realizadas.
En [84] se diseñó un controlador difuso que controla la extracción de laenergía eólica, aplicado al control del ángulo de paso. La velocidad está reg-ulada por otro controlador difuso que actúa sobre el torque del generador demodo que siga el valor de referencia generado por un estimador óptimo de lavelocidad angular. Las simulaciones arrojaron buenos resultados en las tresregiones de operación de la turbina y con vientos turbulentos.
En [85] se diseñó un sistema de control basado en tres controladores di-fusos, cada uno con un objetivo diferente. El primero, sigue la velocidad delgenerador con la velocidad del viento para extraer la máxima potencia. El se-gundo, programa el �ujo de la máquina para el mejoramiento de la e�cienciacon cargas ligeras. El tercero, entrega un control de velocidad robusto contralas ráfagas de viento y el torque oscilatorio de la turbina. En [86] se desar-rolló dos sistemas de control difuso. El primero tenía como objetivo obtenerla máxima transferencia de potencia y mantener la frecuencia constante convelocidad variable por medio del control de la velocidad del generador y al-canzar la máxima relación de velocidad de punta en velocidades de vientobajas. El otro control difuso fue diseñado para mantener la frecuencia y lapotencia de salida constantes controlando el ángulo de paso y la velocidadde rotación de la turbina eólica.
83

En [87] se diseñó un controlador difuso para controlar el momento derotación del rotor aerodinámico y el momento inverso del generador. Se re-alizaron simulaciones y fueron comparadas con las realizadas por un con-trolador PID obteniendo mejores resultados. En [88] se implementó un con-trolador difuso que permite maximizar la extracción de la potencia eólicay suavizar la variación del torque y es combinado con el control del gener-ador que utiliza el método de control vector. En [89] se presentó un sistemaelectrónico de potencia basado en lógica difusa para el control del torqueelectromagnético para la máxima extracción de potencia y el mejoramientodel desempeño dinámico del SCEE. Esta técnica no necesitó de informaciónsobre la velocidad del viento y a través de simulaciones se demostró la efec-tividad del método.
En [90] el principal objetivo era el mejoramiento del control de la veloci-dad y la extracción de energía de una turbina eólica de 800kW. El controladordifuso diseñado para el control del ángulo de paso y el torque, tiene comoentradas el error de la velocidad y la medida de la velocidad del rotor, y comosalidas tiene el ángulo de paso de referencia y el torque eléctrico de referencia.Con simulaciones realizadas se demostró la robustez del controlador difuso yse observó que puede mejorar el desempeño de la turbina eólica en diferentesvelocidades de viento, por encima y por debajo de la nominal.
5.1.8. Estrategias de control combinadas y estudios comparativos
Algunos sistemas de control utilizan más de una estrategia para la ob-tención de mejores resultados de estabilidad y robustez en el control de lasplantas o procesos. A continuación se presentan algunas revisiones de inves-tigaciones realizadas en relación al control de los SCEE.
Los controladores presentados en [91] se han diseñado mediante técnicasavanzadas de control robusto QFT, desarrolladas a partir de modelos teóri-cos y datos experimentales de campo, y combinadas con esquemas adapta-tivos, metodología multivariable y elementos predictivos. Tras una síntesisdel panorama actual y una descripción del aerogenerador, el artículo mues-tra resultados experimentales de control ante condiciones de viento medias yextremas.En [92] se utilizó la combinación del control difuso y las redes neuronales
84

para predecir la dirección y la velocidad del viento para los sistemas de con-trol de los SCEE. La lógica difusa se utiliza como un clasi�cador que estimalos patrones de viento y asigna los pesos de las neuronas. La red neuronales entrenada por el método de retropropagación para la predicción de estasvariables.
El trabajo propuesto en [93] es la aplicación de control predictivo gener-alizado, multivariable sin restricciones a un sistema eólico. Bajo el conceptode la teoría de Floquet y el corolario de reducibilidad de Lyapunov se obtieneun modelo lineal e invariante en el tiempo, pero este modelo esta en estadoestacionario. Se compara con un controlador basado en realimentación linealcuadrática de estados, LQ. Luego se concluye que el GPC en algunos casosposee mejor comportamiento que el control LQ. Así el sistema de controlpropuesto minimiza las perdidas en la transferencia de energía.En [94] se hizo un estudio comparativo basado en simulaciones y experimen-tos de varias estrategias de control MPPT para la conversión de la energíaeólica. Conociendo la curva característica del SCEE (coe�ciente de potenciavs. relación de velocidad de punta) se revisaron las estrategias de control detorque, velocidad y corriente de salida. Sin esta característica, se implementóun control de lógica difusa. También se analizaron diferentes estructuras delconversor acdc con un conversor PWM ó con un puente de diodos recti�-cadores. En [95] se realizó otro estudio comparativo a través de simulacionesen Simulink de Matlab, de tres metodologías de control que son: control LQG,el método de ubicación de los polos de lazo cerrado para obtener buena ro-bustez y la técnica de Grá�co de Orden Causal que representa la naturalezacausal del sistema y que deduce su algoritmo aplicando el principio de inver-sión del modelo.
En [96] se propuso un método de control difuso óptimo adaptativo paralas turbinas eólicas de velocidad variable y ángulo de paso constante y quetienen un comportamiento altamente no lineal. Este método utilizó comovariable controlada a la velocidad rotacional a través del torque aerodinámi-co estimado por un �ltro de Kalman. En [97] se presentó otro método decontrol adaptativo que combina el control difuso con el control por modosdeslizantes y fue utilizado en un sistema eólico de ángulo de paso ajustabley velocidad variable, presentando buen desempeño frente a métodos tradi-cionales de acuerdo con los resultados experimentales. En [98]se presentó otraestrategia de control basada en la maximización de la potencia de salida para
85

un DFIG. Este control adaptativo utilizó la técnica de redes neuronales RBF,buscando mantener la relación de velocidad de punta en su valor óptimo.
En [99] se presentó una estrategia de control para una turbina de veloci-dad variable y ángulo de paso controlado y que alimenta una carga aislada(sistema autónomo). Esta estrategia utilizó dos controladores, uno para elinversor con control PI y el otro para el ángulo de paso que utiliza controldifuso, de esta forma se logró que el sistema alimentara la carga con poten-cia real constante y voltaje constante y operando con diferentes niveles develocidad del viento.
86

5.2. Estrategia para estimación de �exiones estructurales
En este apartado describiremos la contribución de este trabajo al controlde aerogeneradores �exibles. Como se ha descrito en la introducción, el obje-tivo principal del control de un aerogenerador puede resumirse como:"Diseñarla estrategia de manipulación de las variables controlables del aerogeneradorpara maximizar la potencia eléctrica extraída del viento, satisfaciendo si-multáneamente restricciones de contorno como stress estructural (fatiga demateriales), no exceder velocidades y potencias nominales de operación, osatisfacer criterios de calidad de la potencia eléctrica entregada a la red".
De todas las condiciones de contorno que intervienen en el control de aero-generadores, sin duda la más crítica en términos de explotación económicadel aerogenerador, son los esfuerzos estructurales que acortan la vida útilde la turbina debido al desgaste por fatiga. En [102], Sutherland en un in-forme técnico del Sandia National Laboratory, detalla tanto casos históricosde desgaste por fatiga en aerogeneradores, como enfoques avanzados paramitigar estos efectos en los aerogeneradores modernos. En este informe, elautor muestra como los primeros diseños de turbinas, anteriores a la décadade los 80, se realizaban usando análisis estáticos de cargas que, en el mejorde los casos, proporcionaban diseños sobreestimados para los puntos nomi-nales de operación. En otros casos, los diseños provocaban fallo estructuralprematura de la aeroturbina debido a la falta de conocimiento profundo delespectro dinámico de cargas a las que una aeroturbina se ve sometida encondiciones de operación nominales. Sutherland concluye que el ciclo de vidaútil de una aeroturbina, viene dado de forma fundamental por el número deciclos de carga de fatiga acumulados, y es por tanto la fatiga de materialesuna factor muy importante a tener en cuenta en el diseño de las aeroturbinas.
Por otro lado, en [103] Ribrant y Berling realizaron un análisis de fallosde aeroturbinas registrados en Suecia, Finlandia y Alemania entre 1997 y2005, para diversos fabricantes y con�guraciones de aerogeneradores. El in-forme, entre otros resultados interesantes, indica que los fallos estructuralesen palas y sistemas de calados de palas provocan el 13,4% de los fallos de estetipo de sistemas, mientras que la siguiente causa de fallo más corriente, losproblemas en el tren de potencial, representan el 9,8% de los fallos. Resultapor tanto evidente que cualquier estrategia de control que redunde en unadisminución de los ciclos de carga a los que se ve sometida una aeroturbina,
87

prolongará la vida útil y mejorará la explotación económica de la misma.
Si bien el diseño estructural de un aerogenerador está fuera de los ob-jetivos de este trabajo, en este apartado nos proponemos el diseño de unaestructura de control que permita estimar y eventualmente reducir los es-fuerzos a los que se ve sometido un aerogenerador. La estrategia a seguirconsistirá en el diseño de una estructura de observador no lineal que permitaestimar la �exiones a las que se ve sometida la estructura del aerogenerador,y a partir de éstas, inferir los esfuerzos estructurales que podrán ser tenidosen cuenta en una variedad de estrategias de control.
Debido a la di�cultad de la medida directa de los esfuerzos estructuralesa los que se ve sometido un aerogenerador, no es frecuente encontrar en laliteratura técnicas de control que recurran a esta información para realizarcontrol activo de esfuerzos estructurales. Las estrategias más comunes con-sisten en la introducción de amortiguamientos adicionales en el control paramitigar el problema de la fatiga en torno a zonas de operación en las quees bien conocido que estos problemas se magni�can, como por ejemplo latransición entre las las zonas II y III de control , donde la aeroturbina es-tá próxima a alcanzar su potencia nominal. Una técnica bastante utilizadaen los últimos años es la llamada DUC, por sus siglas en inglés Disturbance
Utilization Control [104], donde se emplea un observador sobre un modelolinealizado de la aeroturbina para posteriormente plantear una estructura decontrol lineal LQG que mitigue el efecto de las cargas estructurales.
En este trabajo trataremos de seguir una línea argumental semejante ala propuesta en el método DUC, pero extendiendo el la metodología parael modelo no lineal simpli�cado de aeroturbina que se propone en este tra-bajo. Para ello pasaremos en primer lugar a reformular las ecuaciones delaerogenerador de un modo más conveniente a nuestros propósitos.
5.3. Estimador de modos �exibles
El modelo genérico del aerogenerador descrito en (23), puede expresarsede forma más conveniente como
x =
(0 I
−M(q)−1K(q) −M(q)−1C(q, q)
)x+
(0
−M(q)−1Q
)u (28)
88

donde
q =(
θ φ θr θg
)Ty
x =(
qT qT)T
Además la señal de control u vendrá dada por
u =(
Ft Ta Tg
)TEn este modelo sin embargo las señales de control Ta y FT , es decir, el par
aerodinámico y la fuerza axial sobre la aeroturbina no son directamente noson verdaderas señales de control sobre las que tengamos poder de maniobra,ya que éstas dependen del per�l de viento incidente en el disco aerodinámicoentre otros factores. Por este motivo es más interesante reformular a partirde las expresiones aproximadas de Ta y FT en función de la velocidad delviento v, la velocidad del rotor ωr y el ángulo de calado de palas β.
Recordando las expresiones (18) a (21) tenemos
Ta =1
2ρπR3Cp(λ, β)
λv2
y
Ft =1
2ρπR3Cf (λ, β)
λv2
Con estas de�niciones, podemos linealizar las ecuaciones en torno a un puntode operación como
Ta = αav + γaωr + κaβ
yFt = αf v + γf ωr + κf β
donde αa, γa y κa son respectivamente los factores de escala de variaciones enTa debidos a variaciones de la velocidad del viento, de la velocidad de rotaciónde la aeroturbina y del ángulo de calado de palas. Similares de�nicionespueden obtenerse para αf , γf y κf con respecto a FT .
En régimen permanente, v es la �uctuación de la velocidad del vientoque asumiremos de media nula. Dado que es deseable que la turbina operelo más cercana posible al punto de máxima extracción de potencia, es decir
89

con el mayor coe�ciente de potencia, CP , posible, resulta razonable imponercomo punto de operación preferente aquel que se obtiene para λopt que suelecorresponderse por diseño con un ángulo de calado de palas β = 0o.
Suponiendo conocida v, la velocidad nominal de operación del viento, loscoe�cientes arriba descritos pueden obtenerse como:
αa =∂Ta
∂v
∣∣λopt
= 32ρAR
Cpopt
λoptv αf = ∂FT
∂v
∣∣λopt
= 32ρAR
CTopt
λoptv
γa =∂Ta
∂ωr
∣∣∣λopt
= −12ρAR2Cpopt
λ2opt
v γf = ∂Ta
∂ωr
∣∣∣λopt
= −12ρAR2CTopt
λ2opt
v
κa =∂Ta
∂β
∣∣∣λopt
= 12ρAR
Cpopt
βv2 κf = ∂Ta
∂β
∣∣∣λopt
= 12ρAR
CTopt
βv2
Asumiendo una partición de la ecuación (28) como
x = Ax+B1FT +B2Ta +B3Tg
donde las matrices A, B1, B2 y B3 tienen de�niciones obvias. Con estasde�niciones el modelo del aerogenerador se puede reformular como
ξ = Aξ(ξ)ξ +Bξ(ξ)µ+ Cξ(ξ)ω
donde
µ =(
Tg βu
)Tξ =
(xT Ta Ft β
)Tω =
(v ωr β
)Ty las de�niciones matriciales
Aξ =
A B2 B1 0
0 0 0 0
0 0 0 0
0 0 0 −τβ
Bξ =
B3 0
0 0
0 0
0 1
90

Cξ =
0 0 0
αa γa κa
αf γf κf
0 0 0
Esta formulación permite obtener una descripción de espacio de estados
no lineal del aerogenerador donde la señal de control µ incorpora las señalesde control accesibles en la práctica y los términos variables con las �uctua-ciones del viento y la velocidad del rotor aparecen recogidos en una señal deperturbación ω.
Esta formulación permite adicionalmente formular la estrategia de obser-vador no lineal robusto que se propone a continuación. Para ello reformulemosel modelo del aerogenerador como
ξ = Aξ + Φ(ξ, µ) + Cξ(ξ)ω (29)
y = Cξ
donde A representa el modelo linealizado en torno al punto de operaciónde máxima e�ciencia empleado para la linealización arriba descrita, y Φ(ξ, µ)recoge las variaciones del modelo respecto a este punto de operación.
Es además sencillo veri�car que el sistema anterior es localmente Lipschitzen una región D que contiene al origen. Esto es debido a que las funcionesinvolucradas en la función Φ(ξ, µ) son continuas y derivables, es decir
∥Φ(x1, u)− Φ(x2, u)∥ ≤ γ∥x1 − x2∥ (30)
Consideremos ahora un observador de estados con la estructura
˙x(t) = Ax(t) + Φ(x, u) + L(Cx− y) (31)
La dinámica del observador viene dada por
e(t) △ x(t)− x(t) (32)
e(t) = (A− LC)e(t) + Φ(x, u)− Φ(x, u) (33)
el objetivo es encontrar la ganancia, L, tal que la dinámica del observador esasintóticamente estable. Para ello nos basaremos en el resultado descrito en[100].
91

5.3.1. Observador no lineal robusto H∞
En esta sección recogemos el resultado propuesto en [100] para la con-strucción de un observador no lineal robusto H∞, Lipschitz acotado local-mente.
Consideremos el sistema
x(t) = Ax(t) + Φ(x, u) +Bω(t) (34)
y(t) = Cx(t) (35)
donde ω ϵL2[0,∞) es una perturbación exógena desconocida. Supongamosque
z(t) = He(t) (36)
representa la salida controlada del sistema donde H es una matriz conocida.Nuestro propósito es diseñar la ganancia L del observador tal que la dinámicade error del observador tienda a cero asintóticamente veri�cando una cotasuperior para una determinada norma H∞.
∥z∥ < µ∥ω∥. (37)
El siguiente teorema introduce una metodología para el diseño del obser-vador robusto no lineal, pero antes es necesario introducir una desigualdadque será útil para probar el resultado
Lemma 1 [101]. Para cualquier x, y ϵRn y cualquier matriz de�nida posi-tiva P ϵRn×n, tenemos
2xTy ≤ xTPx+ yTP−1y (38)
Teorema 1. Consideremos el sistema no lineal (29) Lipschitz acotado con con-stante de Lipschitz conocida,γ , junto con el observador (33). La dinámica deerror del observador es asintóticamente establecon la ganancia L2 mínima,µ,si existen escalares α > 1, ε > 0 y ζ > 0 y matrices P > 0 y F tal que elsiguiente problema de optimización LMI tiene solución.
min(ζ)s.t.
ATP + PA− CTF T − FC < −αI − εI (39)
92

1− σ2(H)
2γI P
P1− σ2(H)
2γI
> 0 (40)
HTH +1
2(γ +
1
γ− 2α)I PB
BTP −ζI
< 0 (41)
Una vez el problema es resuelto
L = P−1F (42)
µ∗ , min(µ) =√
ζ. (43)
Prueba:
la prueba de este teorema es reproducida aquí por completitud.La dinámica de error del observador será
e(t) = (A− LC)e(t) + Φ(x, u)− Φ(x, u) +Bω (44)
Consideremos la funcion de Lyapunov candidata
V (t) = eT (t)Pe(t) (45)
Entonces
V (t) = eT (t)Pe(t) + eT (t)P e(t)
= −eTQe+ 2eTP (Φ(x, u)− Φ(x, u))T + eTPBω + ωTBTPe (46)
93

donde, Q se selecciona como Q = αI. Para Q = αI el LMI resulta
ATP + PA− CTF T − FC < −αI − εI (47)
α
2γI P
Pα
2γI
> 0 (48)
son su�cientes para la estabilidad asintótica de la dinámica de error . Toman-do α > 1, siemplre tenemos (48).
Basándonos en la desigualdad de Rayleigh
eTQe ≤ λmax(Q)eT e (49)
Usando ahora el lema 1 podemos escribir
2eTP (Φ(x, u)− Φ(x, u)) ≤
eTPe+ (Φ(x, u)− Φ(x, u))TPP−1P (Φ(x, u)− Φ(x, u)) =
eTPe+ (Φ(x, u)− Φ(x, u))TP (Φ(x, u)− Φ(x, u)). (50)
basándonos en la desigualdad de Rayleigh tenemos
∥eTPe∥ ≤ λmax(P )∥e∥2 = λmax(P )eT e (51)
∥(Φ(x, u)− Φ(x, u))TP (Φ(x, u)− Φ(x, u))∥ ≤
λmax(P )∥(Φ(x, u)− Φ(x, u))∥2 ≤ γ2λmax(P )∥e∥2
= γ2λmax(P )eT e. (52)
Por tanto, de lo anterior
94

2eTP (Φ(x, u)− Φ(x, u)) ≤ (1 + γ2)λmax(P )eT e
≤ 1
2
(γ +
1
γ
)eT e (53)
Asi, de acuerdo con (49) y (53) y sabiendo que Q = αI, tenemos
V (t) ≤ 1
2(γ +
1
γ− 2α)eT e+ eTPBω + ωTBTPe. (54)
Ahora de�nimos
J =
∫ ∞
0
(zT z − ζωTω)dt (55)
thus,
J <
∫ ∞
0
(zT z − ζωTω + V )dt (56)
así, un condición su�ciente para J < 0 es que
∀t ϵ [0,∞), zT z − ζωTω + V < 0 (57)
pero tenemos
zT z − ζωTω + V = eTHTHe− ζωTω + V
≤ eTHTHe+1
2(γ +
1
γ− 2α)eT e+ eTPBω + ωTBTPe− ζωTω
=[eT ωT
] [ HTH + 12(γ + 1
γ− 2α)I PB
BTP −ζI
][e
ω
](58)
95

de modo que una condición su�ciente para que J < 0 es que la matrizanterior que es la misma que (41) sea de�nida negativa. Entonces
zT z − ζωTω < 0 −→ ∥z∥ <√
ζ∥ω∥. (59)
La desigualdad (50) puede escribirse como
2eTP (Φ(x, u)− Φ(x, u)) ≤ 2γλmax(P )eT e (60)
Siguiendo pasos similares, la matriz en (58) se transforma en HTH + [2γλmax(P )− α]I PB
BTP −ζI
< 0 (61)
La matriz anterior no se puede usar junto con (47) y (48) porque considerarP como una las varibles del LMI, es no lineal en P . Se puede, sin embargo,dar otra aproximación a λmax(P ). De acuerdo con el complemento de Schur,(61) es equivalente a
−ζI < 0 (62)
HTH + [2γλmax(P )− α]I +1
ζPBBTP < 0 (63)
El tercer término en la expresión anterior es siempre no negativo, así que esnecesario tener
HTH + [2γλmax(P )− α]I < 0 (64)
pero para cualquier otra matriz simétrica, para HTH, tenemos
λmin(HTH)I ≤ HTH ≤ λmax(H
TH)I (65)
o de acuerdo con la de�nición de valores singulares
σ2(H)I ≤ HTH ≤ σ2(H)I (66)
96

De este modo, un condición su�ciente para (64) es
σ2(H) + 2γλmax(P )− α < 0 (67)
o
λmax(P ) <α− σ2(H)
2γ(68)
Para tener (68), es su�ciente que
λmax(P ) <1− σ2(H)
2γ(69)
que es equivalente a (40).
5.4. Aplicación al modelo de aerogenerador y resultados
de simulación
El teorema descrito en el apartado anterior permite el diseño de una es-tructura de observación robusta para el aerogenerador sin más que observarque el modelo obtenido en (29) se ajusta a las hipótesis del modelo consid-erado en el teorema.
Para la veri�cación de estos resultados sobre el aerogenerador, se ha em-pleado el modelo anteriormente identi�cado tomando en consideración lassiguientes hipótesis:
1. Los experimentos se han realizado considerando variaciones ligeras re-specto al punto de operación de modo que el punto de operación delmodelo no sea demasiado perturbado. Es decir se han considerado per-�les de viento de media constante o lentamente variables.
2. Los valores de las constantes de Lipschitz consideradas han sido nece-sariamente estimativos, Un procedimiento prueba y error ha sido em-pleado en este caso.
3. El control se ha realizado integramente en zona II, por lo que el ángulode calado de las palas se ha tomado �jo en la posición de máximae�ciencia. Dado que este valor es desconocido en el modelo de FAST,se ha supuesto que esta posición se corresponde con β = 0o.
97

0 5 10 15 200
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Tiempo (s)
Fle
xión
(m
)
Validación del observador no lineal
Flexión de las palas estimada (Modelo)Flexión de las palas (FAST)
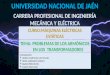
Figura 23: Flexión de palas observadas frente a las obtenida con FAST paraun per�l de velocidad de viento constante de 12m/s.
0 5 10 15 20−0.02
0
0.02
0.04
0.06
0.08
0.1
Tiempo (s)
Fle
xión
(m
)
Validación del observador no lineal
Flexión de la torre estimada (Modelo)Flexión de la torre (FAST)
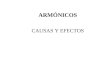
Figura 24: Flexión de la torre observada frente a la obtenida con FAST paraun per�l de velocidad de viento constante de 12m/s.
98

0 5 10 15 209.7
9.8
9.9
10
10.1
10.2
10.3
Tiempo (s)
velo
cida
d (m
/s)
Validación del observador no lineal
Perfil de viento turbulento considerado
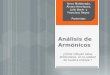
Figura 25: Per�l de viento turbulento de media 10m/s considerado consider-ado para los experimentos
4. Las simulaciones se han realizado sobre la turbina bipala AWT-27CR2,cuyo modelo proporciona el software FAST, tomando dos tipos de per-�les de viento: uno constante de 12m/s, y otro turbulento de 10m/s.
5. En todos los casos se ha considerado una estrategia de control simpleISC (Indirect speed control) que permite estabilizar el comportamientode la aeroturbina en torno a punto de operación. Lamentablemente noha sido posible emplear la estructura de observador propuesta para eldiseño de controladores especí�cos, tarea ésta que se deja como posibledesarrollo futuro.
Los resultados de simulación muestran tal como era de esperar que que el�ltro de estimación propuesto hereda los problemas ya detectados en la faseinicial de identi�cación del modelo. Es decir, el estimador tiende a subestimaren un factor de entre 3 y 10 según los experimentos realizados las �exionestanto de pala como de torre. Así las �guras 21 y 24 muestran los resultados
99

de simulación para las �exiones de pala y torre respectivamente para un per-�l de viento ideal constante de 12m/s. Los resultados muestran una ciertadesviación en régimen permanente además de la mencionada subestimaciónde las �exiones. Idéntico resultado se obtiene en la grá�cas 26 y 27 cuando elper�l de velocidades es turbulento de media 10m/s tal como se muestra enla �gura 25.La explicación que se encuentra a este efecto está en la de�ciencias del pro-pio modelo de simulación, que si bien tiene una estructura su�cientementesimple para plantear estructuras de control simpli�cadas, no puede recogermatices del modelo de alta dimensión de FAST.
No obstante es interesante resaltar que la tendencia general de los val-ores de �exión son correctamente recogidas y proporcionan una estimulantelínea de investigación para futuros desarrollos que empleen la informaciónproporcionada por el observador aplicado en este trabajo.
100

0 5 10 15 20−0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
Tiempo (s)
Fle
xión
(m
)
Validación del observador no lineal
Flexión de la torre estimada (Modelo)Flexión de la torre (FAST)
Figura 26: Flexión de la torre observada frente a la obtenida con FAST paraun per�l de velocidad de viento turbulento de 10m/s.
0 5 10 15 20−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Tiempo (s)
Fle
xión
(m
)
Validación del observador no lineal
Flexión de palas estimada (Modelo)Flexión de palas (FAST)
Figura 27: Flexión de palas observada frente a la obtenida con FAST paraun per�l de velocidad de viento turbulento de 10m/s.
101