Embed Size (px)
Citation preview
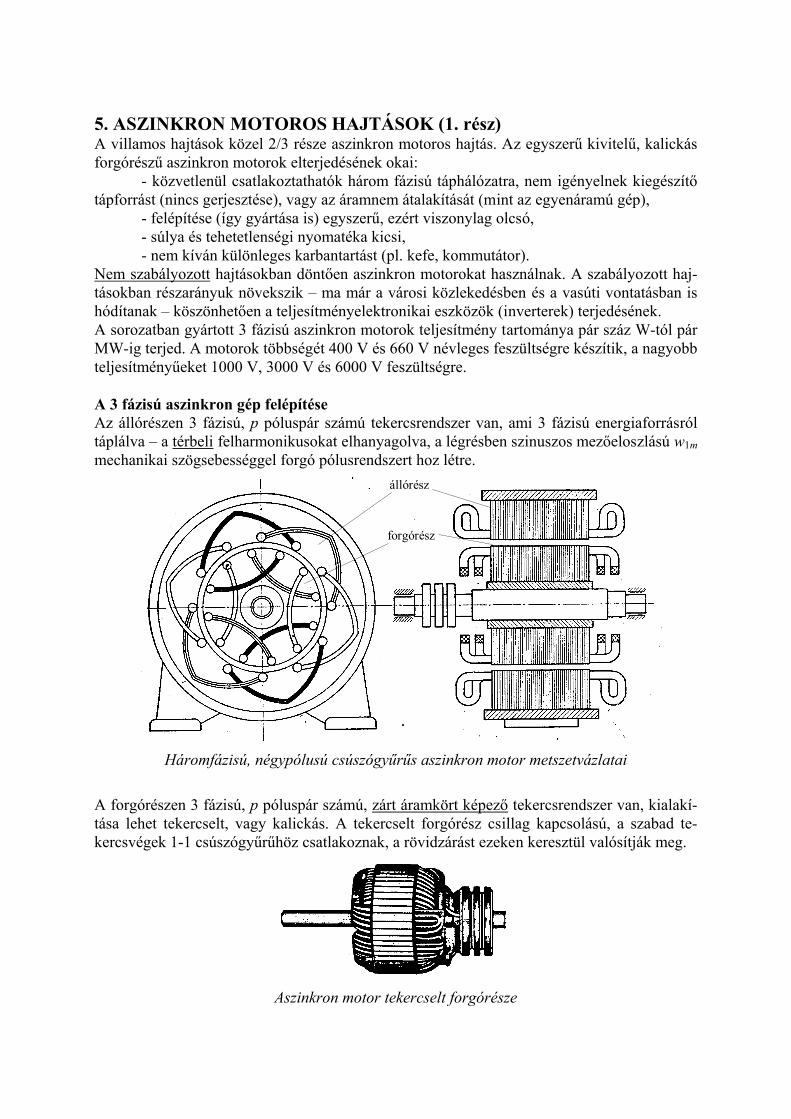
5. ASZINKRON MOTOROS HAJTÁSOK (1. rész) A villamos hajtások közel 2/3 része aszinkron motoros hajtás. Az egyszerű kivitelű, kalickás forgórészű aszinkron motorok elterjedésének okai: - közvetlenül csatlakoztathatók három fázisú táphálózatra, nem igényelnek kiegészítő tápforrást (nincs gerjesztése), vagy az áramnem átalakítását (mint az egyenáramú gép), - felépítése (így gyártása is) egyszerű, ezért viszonylag olcsó, - súlya és tehetetlenségi nyomatéka kicsi, - nem kíván különleges karbantartást (pl. kefe, kommutátor). Nem szabályozott hajtásokban döntően aszinkron motorokat használnak. A szabályozott haj-tásokban részarányuk növekszik – ma már a városi közlekedésben és a vasúti vontatásban is hódítanak – köszönhetően a teljesítményelektronikai eszközök (inverterek) terjedésének. A sorozatban gyártott 3 fázisú aszinkron motorok teljesítmény tartománya pár száz W-tól pár MW-ig terjed. A motorok többségét 400 V és 660 V névleges feszültségre készítik, a nagyobb teljesítményűeket 1000 V, 3000 V és 6000 V feszültségre. A 3 fázisú aszinkron gép felépítése Az állórészen 3 fázisú, p póluspár számú tekercsrendszer van, ami 3 fázisú energiaforrásról táplálva – a térbeli felharmonikusokat elhanyagolva, a légrésben szinuszos mezőeloszlású w1m mechanikai szögsebességgel forgó pólusrendszert hoz létre.
állórész
forgórész
Háromfázisú, négypólusú csúszógyűrűs aszinkron motor metszetvázlatai
A forgórészen 3 fázisú, p póluspár számú, zárt áramkört képező tekercsrendszer van, kialakí-tása lehet tekercselt, vagy kalickás. A tekercselt forgórész csillag kapcsolású, a szabad te-kercsvégek 1-1 csúszógyűrűhöz csatlakoznak, a rövidzárást ezeken keresztül valósítják meg.
Aszinkron motor tekercselt forgórésze
KAUVH12DNM Villamos hajtások 2017
2
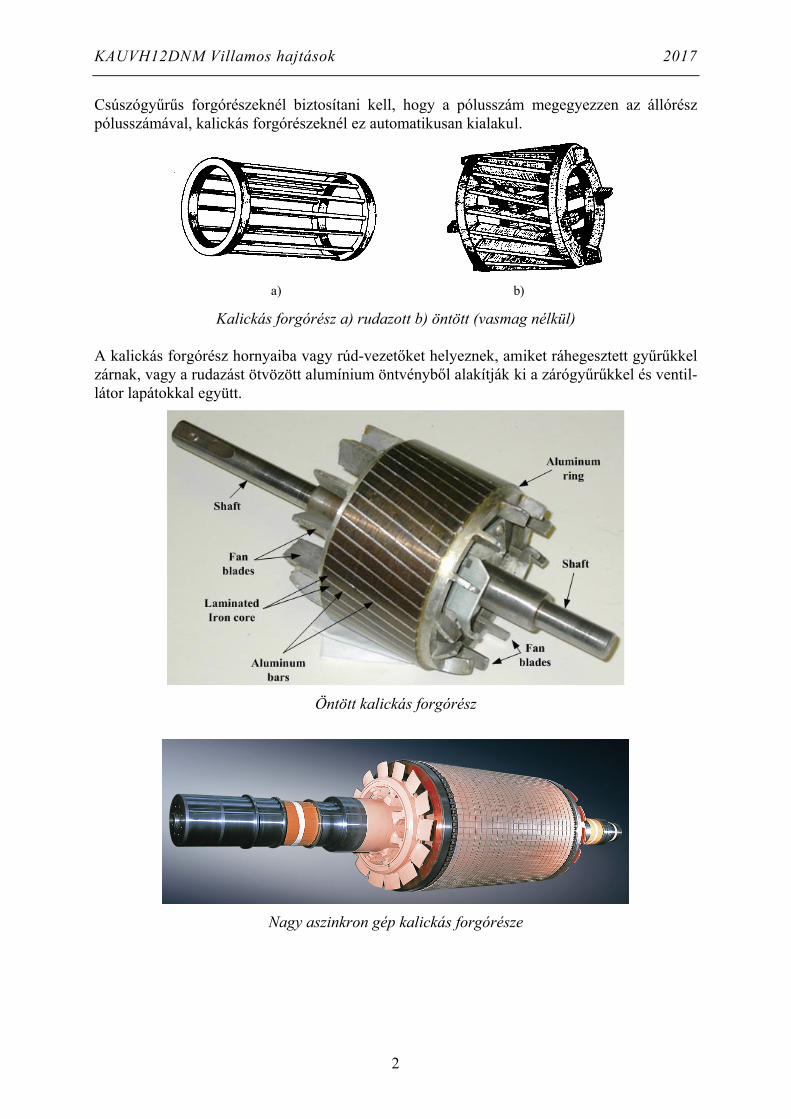
Csúszógyűrűs forgórészeknél biztosítani kell, hogy a pólusszám megegyezzen az állórész pólusszámával, kalickás forgórészeknél ez automatikusan kialakul.
a) b) Kalickás forgórész a) rudazott b) öntött (vasmag nélkül)
A kalickás forgórész hornyaiba vagy rúd-vezetőket helyeznek, amiket ráhegesztett gyűrűkkel zárnak, vagy a rudazást ötvözött alumínium öntvényből alakítják ki a zárógyűrűkkel és ventil-látor lapátokkal együtt.
Öntött kalickás forgórész
Nagy aszinkron gép kalickás forgórésze

ASZINKRON MOTOROS HAJTÁSOK (1. rész)
3
Nagy aszinkron gép állórésze
Nagy aszinkron gép metszetrajza
KAUVH12DNM Villamos hajtások 2017
4
Zárt házkialakítású kis aszinkron motor
Kis aszinkron motor álló- és forgórész vastestének lemezrajza
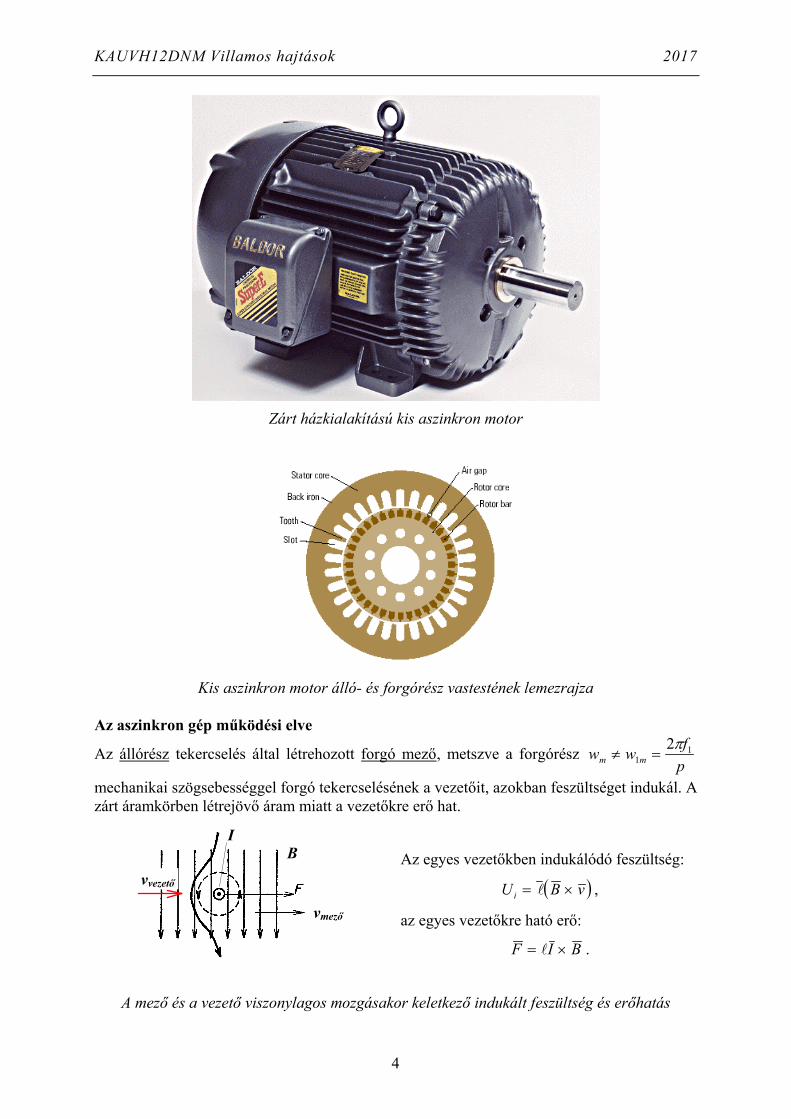
Az aszinkron gép működési elve
Az állórész tekercselés által létrehozott forgó mező, metszve a forgórész w w fpm m≠ =1
12π
mechanikai szögsebességgel forgó tekercselésének a vezetőit, azokban feszültséget indukál. A zárt áramkörben létrejövő áram miatt a vezetőkre erő hat.
vmező
Bvvezető
I
Az egyes vezetőkben indukálódó feszültség:
( )U B vi = ×l ,
az egyes vezetőkre ható erő:
F I B= ×l .
A mező és a vezető viszonylagos mozgásakor keletkező indukált feszültség és erőhatás

ASZINKRON MOTOROS HAJTÁSOK (1. rész)
5
A forgórész szimmetrikus tekercseiben folyó szimmetrikus 3 fázisú áramok forgó mágneses mezőt hoznak létre. A forgórészben indukálódó feszültség fr frekvenciája arányos a szögse-besség különbség (w1m- wm), illetve fordulatszám különbség (n1- n) állórész mezőhöz képesti viszonylagos értékével:
f f w ww
f n nnr
m m
m
=−
=−
11
11
1
1
.
A viszonylagos szögsebesség különbséget (viszonylagos fordulatszám különbséget) szlipnek nevezik és S-el jelölik. A szlip a villamos szögsebességekkel és a (mechanikai) fordulatszám-okkal is kifejezhető:
S w ww
w ww
n nn
m m
m
=−
=−
=−1
1
1
1
1
1
.
w1
w
S
1
0
motorosellenáramú generátoros
A szlip és a szögsebesség összefüggése Ezzel fr=Sf1, a forgórész indukált feszültségének és áramának frekvenciája az állórész táp-frekvencia szlipszerese. A forgórész áram egy olyan forgó mezőt létesít, aminek mechanikai szögsebessége a forgórészhez képest
w fp
Sfp
S wp
Sw w wrmr
m m m= = = = = −2 2 1 1
1 1π π .
Tehát álló koordináta rendszerben a forgórész forgó mezőjének szögsebessége: wm+wrm=w1m, megegyezik az állórész által létrehozott mező mechanikai szögsebességével, az álló- és forgó-rész tekercsrendszere által létrehozott mágneses pólusrendszer mechanikai szögsebessége egyaránt w1m (villamos szögsebessége w1). Így a forgórész pólusrendszere kapcsolódni tud az állórész mágneses pólusrendszerével, ami a nyomatékképzés előfeltétele. Mivel a forgórészben csak akkor indukálódik feszültség, ha a vezetőit metszik az állórész mágneses erővonalai, az aszinkron gépnek szinkron fordulatszámon nincs nyomatéka, a mű-ködés feltétele az állórész forgó mezője és a forgórész vezetői közötti szögsebesség különb-ség. Működési elve alapján az aszinkron gépet indukciós motornak is nevezik.

KAUVH12DNM Villamos hajtások 2017
6
a
bc
w fpm1
12=
π
I1(f1)
Ir(fr)wm
w fprm
r=2π
állórész kr-benállórész kr-benforgórész kr-ben
w wp
w wm m rm11= = +
2 21π πfp
w fpm
r= +
A szlip:
S w ww
ww
m m
m
rm
m
=−
=1
1 1
Sw1m=w1m-wm= wrm
S w ww
=−1
1
Sw1=w1-w Sf1= fr
w1 – az állórész által létrehozott mágneses mező villamos szögsebessége az állórész-hez képest,
w1m – az állórész által létrehozott mágneses mező mechanikai szögsebessége az álló-részhez képest,
w – a forgórész villamos szögsebessége álló koordináta rendszerben, wm – a forgórész mechanikai szögsebessége álló koordináta rendszerben, wrm – a forgórész által létrehozott mágneses mező mechanikai szögsebessége a forgó-
részhez képest, f1 – az állórész tápfeszültségének alapharmonikus frekvenciája, fr – a forgórész indukált feszültségének alapharmonikus frekvenciája. S – a szlip (csúszás) – a szinkron szögsebességhez viszonyított szögsebesség kü-
lönbség, a forgórész viszonylagos lemaradása. Az aszinkron gép alapegyenletei Az egyenletek a gép felépítése és áramkörei alapján könnyen felírhatók. Az állórész paraméterei és változói index nélkül, a forgórész paraméterei és változói r index-el állnak. Az állórész feszültség egyenlete állórészhez rögzített koordináta rendszerben hasonlóan ala-kulnak, mint a szinkron gép állórészénél, a Park-vektoros alakhoz a fázisegyenletek definíció szerinti szorzásával és összeadásával jutunk:
u i R ddta a
a= +Ψ ·
23
u i R ddtb b
b= +Ψ · 2
3a
u i R ddtc c
c= +Ψ · 2
32a
u iR ddt
= +Ψ
ASZINKRON MOTOROS HAJTÁSOK (1. rész)
7
ia ib icua
ddt
aΨ
Ra
ddt
raΨ
La
ira irb irc
Lra
Rra
ura
állórész
forgórész
a b c
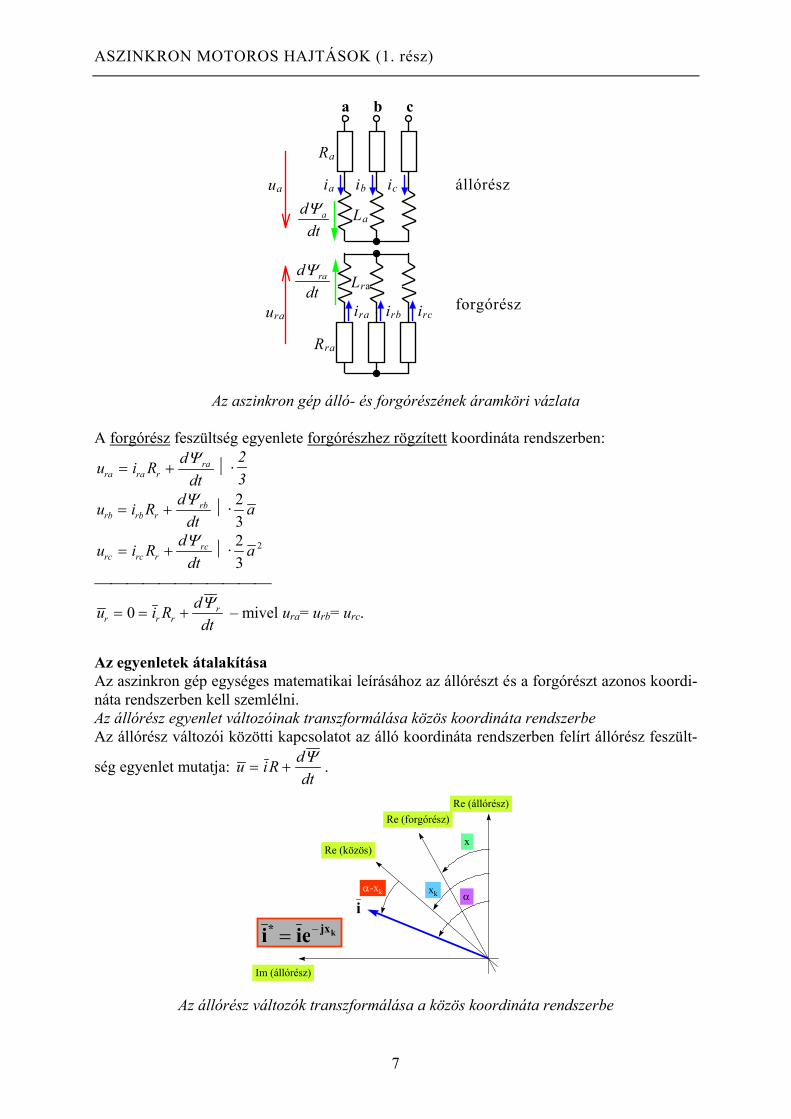
Az aszinkron gép álló- és forgórészének áramköri vázlata
A forgórész feszültség egyenlete forgórészhez rögzített koordináta rendszerben:
u i R ddtra ra r
ra= +Ψ ·
23
u i R ddtrb rb r
rb= +Ψ · 2
3a
u i R ddtrc rc r
rc= +Ψ · 2
32a
u i R ddtr r r
r= = +0 Ψ – mivel ura= urb= urc.
Az egyenletek átalakítása Az aszinkron gép egységes matematikai leírásához az állórészt és a forgórészt azonos koordi-náta rendszerben kell szemlélni. Az állórész egyenlet változóinak transzformálása közös koordináta rendszerbe Az állórész változói közötti kapcsolatot az álló koordináta rendszerben felírt állórész feszült-
ség egyenlet mutatja: u iR ddt
= +Ψ .
Re (állórész)
Im (állórész)
Re (forgórész)
xRe (közös)
xk
iα
α-xk
i ie jxk* = −
Az állórész változók transzformálása a közös koordináta rendszerbe

KAUVH12DNM Villamos hajtások 2017
8
Ha pl. az állórész áram Park-vektora egy adott pillanatban az állórészhez rögzített koordináta rendszerben i ie j= α alakú, akkor ugyanez a vektor egy tetszőleges közös koordináta rend-szerben (csillaggal jelölve): ( )i ie iej x jxk k* = =− −α , ahol xk – a közös koordináta rendszer szög-helyzete a vizsgált pillanatban. Az i állórész áram Park-vektora álló koordináta rendszerben, a közös koordináta rendszerbeli i * vektorral felírva:
i i e jxk= * . Az forgórész egyenlet változóinak transzformálása közös koordináta rendszerbe A forgórész változói közötti kapcsolatot a forgórészhez rögzített koordináta rendszerben felírt
forgórész feszültség egyenlet mutatja: u i R ddtr r r
r= = +0 Ψ .
Ha pl. a forgórész áram Park-vektora forgórészhez rögzített koordináta rendszerben i i er r
j r= α alakú, akkor ugyanez a vektor egy tetszőleges közös koordináta rendszerben (csil-
laggal jelölve): ( )[ ] ( )i i e i er rj x x
rj x xr k k* = =− − − −α , ahol x – a forgórészhez rögzített koordináta
rendszer szöghelyzete a vizsgált pillanatban. Re (állórész)
Im (állórész)
Re (forgórész)
xRe (közös)
xk
irαr
αr-(xk-x)
( )i i er rj x xk* = − −
A forgórész változók transzformálása a közös koordináta rendszerbe
Az ir forgórész áram Park-vektor forgórészhez rögzített koordináta rendszerben, a közös ko-ordináta rendszerbeli ir
* vektorral felírva: ( )i i er r
j x xk= −* . Az állórész feszültség egyenlete a közös koordináta rendszerben értelmezett változók Park-vektorával:
( )u e Ri e ddt
e Ri e e ddt
j e dxdt
jx jx jx jx jx jx kk k k k k k* * * **
*= + = + +Ψ Ψ Ψ ,
e jxk -val történő egyszerűsítés után
u Ri ddt
j wk* *
**= + +
Ψ Ψ .
A forgórész feszültség egyenlete a közös koordináta rendszerben felírt változókkal: ( ) ( ) ( )( ) ( ) ( ) ( ) ( )u e R i e d
dte R i e e d
dtj e
d x xdtr
j x xr r
j x xr
j x xr r
j x x j x x rr
j x x kk k k k k k* * * **
*− − − − − −= + = + +−
Ψ Ψ Ψ ,
( )e j x xk − -val történő egyszerűsítés után

ASZINKRON MOTOROS HAJTÁSOK (1. rész)
9
( )u R i ddt
j w wr r rr
r k* *
**= = + + −0 Ψ Ψ .
Mindkét egyenletben megjelenik egy forgási indukált feszültség jellegű tag, amelynek nagy-sága a koordináta rendszer szögsebességétől függ. Az aszinkron gép feszültég egyenletei (közös koordináta rendszerben, csillagozás nélkül):
u Ri ddt
jwk= + +Ψ Ψ
( )u R i ddt
j w wr r rr
k r= = + + −0 Ψ Ψ
A jwkψ tag azért került az állórész feszültség egyenletébe, mert a koordináta rendszer wk szögsebességgel forog, és ha ebben a koordináta rendszerben az állórész fluxus állandó, akkor az az állórészben jwkψ nagyságú feszültséget indukál. Ugyanez a fizikai magyarázata a for-górész feszültség egyenlet ( )j w wk r− ψ tagjának. A mechanikai egyenlet a szokásos, független a villamos és mágneses mennyiségek koordináta rendszerétől:
M M M dwdt p
dwdtt d
m− = = =Θ Θ ,
itt M – a motor, Mt – a terhelés nyomatéka, Md – a dinamikai nyomaték, Θ – a hajtás (motor Θm és terhelés Θt összegezett) tehetetlenségi nyomatéka. Általában wk=0-t használnak állórész, wk=w-t forgórész aszimmetria esetében (pl. félvezetős táplálás, meghibásodás), wk=w1 szinkron forgó koordinátarendszert pedig az állandósult álla-pot vizsgálatánál. A közös koordináta rendszer szögsebességének megválasztása a) Állórész aszimmetria (pl. félvezetős táplálás) esetén wk=0-t – álló koordináta rendszert használnak. A feszültség egyenletek:
u Ri ddt
= +Ψ ,
u R i ddt
jwr r rr
r= = + −0 Ψ Ψ .
b) Forgórész aszimmetria (pl. félvezető a forgórész áramkörben, egyenáramú gerjesztés) wk=w – forgórészhez rögzített koordináta rendszer a célszerű. A feszültség egyenletek:
u Ri ddt
jw= + +Ψ Ψ
u R i ddtr r r
r= = +0 Ψ
c) Szimmetrikus esetben és állandósult állapotban szokásos a wk=w1 – szinkron szögsebes-séggel forgó koordináta rendszer. A feszültség egyenletek ebben az esetben:
u Ri ddt
jw= + +Ψ Ψ1
( )u R i ddt
j w w R i ddt
jSwr r rr
r r rr
r= = + + − = + +0 1 1Ψ Ψ Ψ Ψ

KAUVH12DNM Villamos hajtások 2017
10
Állandósult állapotban, szinkron forgó koordináta rendszerben ddtΨ
= 0 és ddt
rΨ= 0 , így
U RI jw= + 1Ψ , ha az állórész ellenállás elhanyagolható, R≈0, akkor U jw= 1Ψ , ( )U R I j w w R I jSwr r r r r r r= = + − = +0 1 1Ψ Ψ (Rr rendszerint nem elhanyagolható).
A forgórész egyenletből adódóan
0 1= +I RS
jwrr
rΨ ,
vagyis állandósult állapotban az Ir rotoráram vektora merőleges a Ψ r rotorfluxus vektorának irányára. Állandósult állapotra érvényes egyenletrendszer és helyettesítő áramkör Az állórész fluxus felbontása főmezőre és szórt fluxusra
Ψ Ψ Ψ= +s m illetve Ψ Ψ Ψr rs rm= + ,
ahol Ψs=ILs, Ψrs=IrLrs, az állórész szórt fluxusát az állórész áram, a forgórészét a forgórész áram hozza létre egy megfelelő szórási induktivitáson. A Ψm ésΨrm tekercsfluxusok az álló- és forgórésszel egyformán kapcsolódó Φm (kölcsönös vagy főmező) fluxusból számíthatók: Ψ Φm mN= , Ψ Φrm r mN= , itt N és Nr – az álló- és a forgórész fázistekercsek menetszáma.
Állandósult állapotban ddtΨ
= 0 és ddt
rΨ= 0 ,
így a feszültség egyenletek U RI jw RI jw L I jwk k s k= + = + +Ψ Ψm ,
( ) ( ) ( )U R I j w w R I j w w L I j w wr r r k r r k rs r k= = + − = + − + −0 Ψ Ψr rm . Szinkron szögsebességgel forgó koordináta rendszerben, wk=w1 választással: Xs=w1Ls és Xrs=w1Lrs helyettesítéssel: U RI jX I jw RI jX I Us s m= + + = + +1Ψm ( ) ( )U R I j w w L I j w wr r r rs r= = + − + − =0 1 1 Ψ rm
= + + = + +R I jSX I jSw R I jX I Ur r rs r r r rs r rm1Ψ rm U m és Urm a Ψm és Ψrm (főmező) fluxus által indukált feszültség az álló- és a forgórész te-kercsekben. Az egyenletekben szereplő Xrs forgórészköri szórási reaktanciát az Lrs forgórészköri szórási induktivitásból a névleges w1 körfrekvenciával és nem a forgórész aktuális wr körfrekvenciá-jával definiálják. Ezért a tényleges, fr forgórész frekvenciától függést az S szorzó jelzi: 2πfrLrs=SXrs.
Mivel Ψ Ψ Ψrm
rm
m
r
NN a
= = , ezért ( )U j w wa
jSwa
S Uarm
m
r
m
r
m
r
= −1 1Ψ Ψ= = ,
ahol a NNr
r
= – az állórész és forgórész fázis tekercsei közötti menetszám áttétel.
A forgórész egyenlet ezekkel az átalakításokkal
U R I jSX I S Uar r r rs r
m
r
= = + +0 .

ASZINKRON MOTOROS HAJTÁSOK (1. rész)
11
Az egyenletek alapján felrajzolható az álló- és a forgórész állandósult állapoti áramköri vázla-ta (wk=w1 koordináta rendszerben)
R jXs RrjSXrs
U
I
Ur = 0U jwm 1= Ψm U S Uarm
m
r
=
Ir
Az aszinkron gép álló- és forgórészének áramköri vázlata állandósult állapotra
A forgórész feszültség egyenletét az S szlippel osztva megszűnik a frekvencia különbség az álló- és forgórész mennyiségek között, aminek következménye az egyenletben megjelenő Rr/S, a szlipfüggő ellenállás
US
RS
I jX I Ua
r rr rs r
m
r
= = + +0 .
Az álló és a forgórész helyettesítő áramköri vázlata akkor kapcsolható össze, ha az indukált Um és Urm feszültségek megegyeznek, amit a forgórész Urm feszültségének az ar menetszám áttétellel való korrekciója (állórészre redukálása) útján érünk el. A teljesítmény, a veszteség és a viszonylagos feszültségesések változatlanságának (invarian-ciájának) biztosítása érdekében a feszültségegyenlet ar-el való szorzása miatt az Ir áramot ar-el osztani kell, ezért szerepel az áramot tartalmazó tagokban a redukákási tényező négyzete. Vesszővel jelölve a redukált mennyiségeket:
a US
a RS
Ia
ja X Ia
Urr r r r
rr rs
r
rm= = + +0
22 ,
′= =
′′ + ′ ′ +
US
RS
I jX I Ur rr rs r m0 ,
vagyis Ur'=arUr, Rr'=ar2Rr, Xrs'=ar
2Xrs, ′ =I Iar
r
r
.
A továbbiakban ar=1-et feltételezünk és a redukálást nem jelöljük a mennyiségek vesszőzésé-vel. Mivel az átalakítás eredményeként az álló- és forgórész egyenletben is ugyanaz az Um szerepel, továbbá a forgórész változók frekvenciája megegyezik az állórész változókéval, a két áramkör összeköthető, ezzel létrejön az egyesített Park-vektoros helyettesítő áramköri vázlat állandósult állapotra.
R jXs
RS
r
jXrs
US
Umrm=jXm
US
r = 0Um
I Ir
ImU U jwψ = 1Ψ U jw
r 1 rψ = Ψ
Az aszinkron gép egyesített áramköri vázlata állandósult állapotra
KAUVH12DNM Villamos hajtások 2017
12
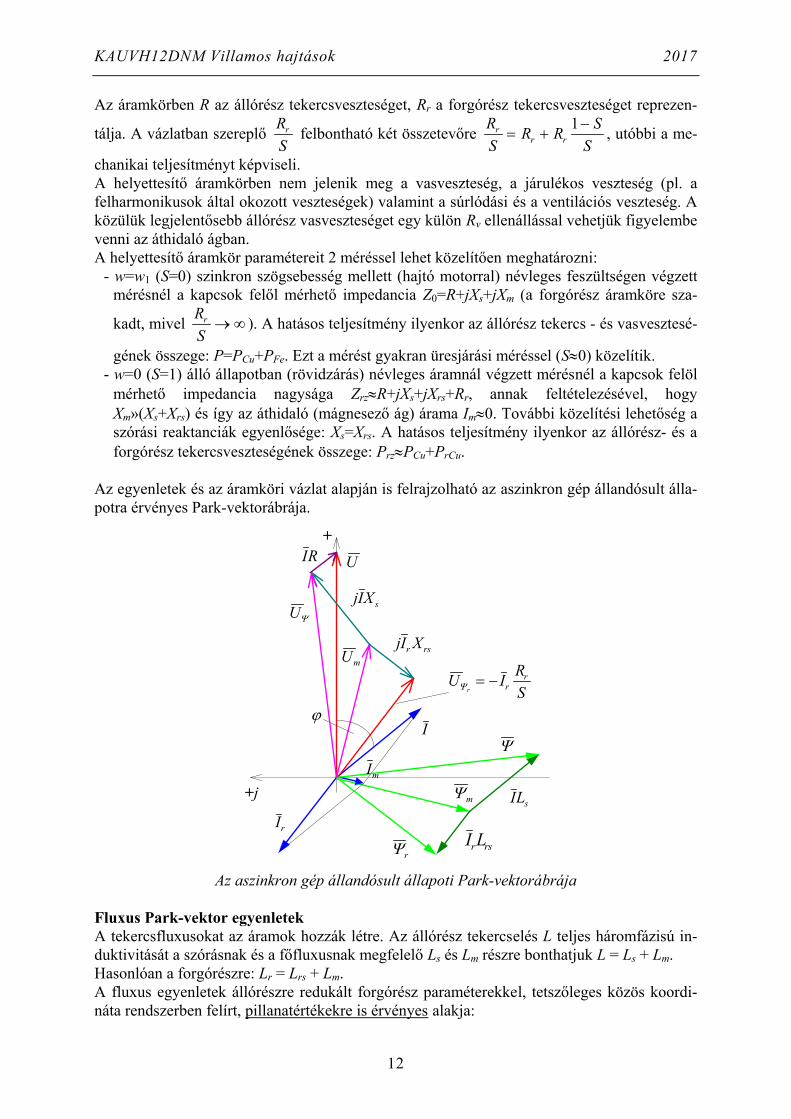
Az áramkörben R az állórész tekercsveszteséget, Rr a forgórész tekercsveszteséget reprezen-
tálja. A vázlatban szereplő RS
r felbontható két összetevőre RS
R R SS
rr r= +
−1 , utóbbi a me-
chanikai teljesítményt képviseli. A helyettesítő áramkörben nem jelenik meg a vasveszteség, a járulékos veszteség (pl. a felharmonikusok által okozott veszteségek) valamint a súrlódási és a ventilációs veszteség. A közülük legjelentősebb állórész vasveszteséget egy külön Rv ellenállással vehetjük figyelembe venni az áthidaló ágban. A helyettesítő áramkör paramétereit 2 méréssel lehet közelítően meghatározni:
- w=w1 (S=0) szinkron szögsebesség mellett (hajtó motorral) névleges feszültségen végzett mérésnél a kapcsok felől mérhető impedancia Z0=R+jXs+jXm (a forgórész áramköre sza-
kadt, mivel RS
r → ∞ ). A hatásos teljesítmény ilyenkor az állórész tekercs - és vasvesztesé-
gének összege: P=PCu+PFe. Ezt a mérést gyakran üresjárási méréssel (S≈0) közelítik. - w=0 (S=1) álló állapotban (rövidzárás) névleges áramnál végzett mérésnél a kapcsok felöl
mérhető impedancia nagysága Zrz≈R+jXs+jXrs+Rr, annak feltételezésével, hogy Xm»(Xs+Xrs) és így az áthidaló (mágnesező ág) árama Im≈0. További közelítési lehetőség a szórási reaktanciák egyenlősége: Xs=Xrs. A hatásos teljesítmény ilyenkor az állórész- és a forgórész tekercsveszteségének összege: Prz≈PCu+PrCu.
Az egyenletek és az áramköri vázlat alapján is felrajzolható az aszinkron gép állandósult álla-potra érvényes Park-vektorábrája.
+
+j
Um
IR
jIXs
U
Iϕ
Ψ
ILs
jI Xr rs
U I RSr r
rΨ = −
Ψm
ΨrI Lr rs
Ir
Im
UΨ
Az aszinkron gép állandósult állapoti Park-vektorábrája
Fluxus Park-vektor egyenletek A tekercsfluxusokat az áramok hozzák létre. Az állórész tekercselés L teljes háromfázisú in-duktivitását a szórásnak és a főfluxusnak megfelelő Ls és Lm részre bonthatjuk L = Ls + Lm. Hasonlóan a forgórészre: Lr = Lrs + Lm. A fluxus egyenletek állórészre redukált forgórész paraméterekkel, tetszőleges közös koordi-náta rendszerben felírt, pillanatértékekre is érvényes alakja:
ASZINKRON MOTOROS HAJTÁSOK (1. rész)
13
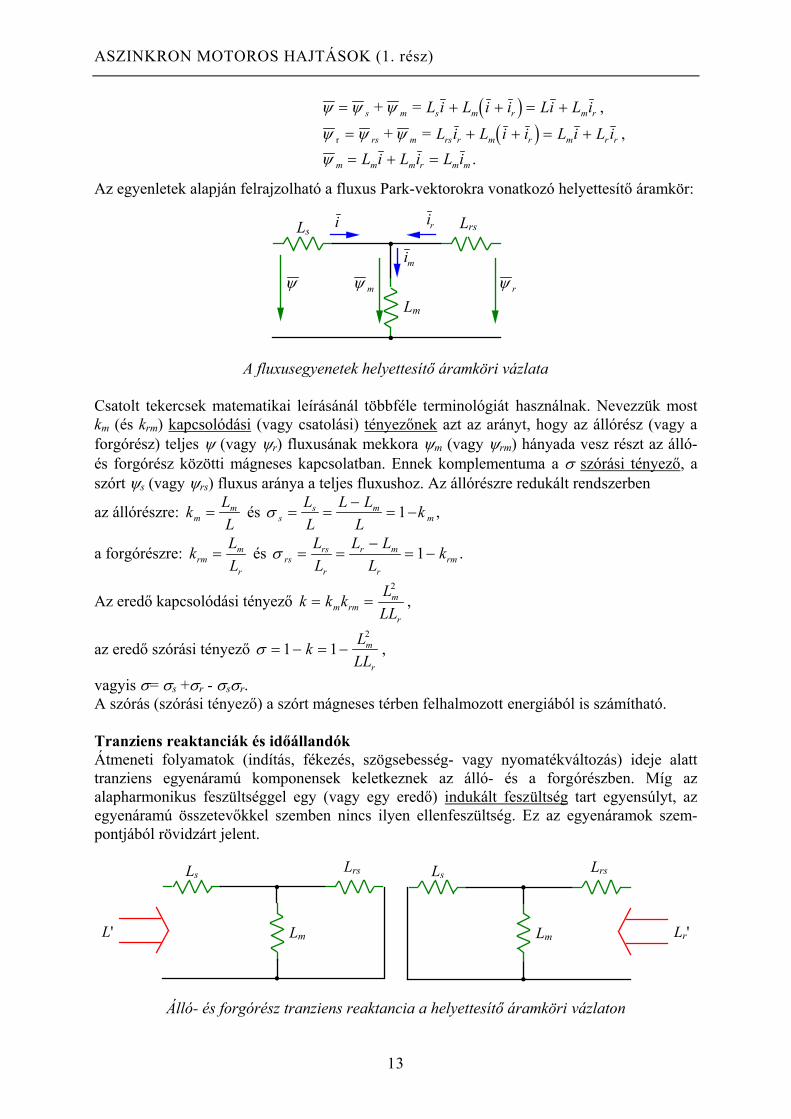
( )ψ ψ ψ= + + = +s m s m r m rL i L i i Li L i+ = ,
( )ψ ψ ψr + == + + = +rs m rs r m r m r rL i L i i L i L i , ψ m m m r m mL i L i L i= + = .
Az egyenletek alapján felrajzolható a fluxus Park-vektorokra vonatkozó helyettesítő áramkör:
Ls Lrs
Lm
ψ
i ir
ψ r
im
ψ m
A fluxusegyenetek helyettesítő áramköri vázlata
Csatolt tekercsek matematikai leírásánál többféle terminológiát használnak. Nevezzük most km (és krm) kapcsolódási (vagy csatolási) tényezőnek azt az arányt, hogy az állórész (vagy a forgórész) teljes ψ (vagy ψr) fluxusának mekkora ψm (vagy ψrm) hányada vesz részt az álló- és forgórész közötti mágneses kapcsolatban. Ennek komplementuma a σ szórási tényező, a szórt ψs (vagy ψrs) fluxus aránya a teljes fluxushoz. Az állórészre redukált rendszerben
az állórészre: k LLm
m= és σ ss m
mLL
L LL
k= =−
= −1 ,
a forgórészre: k LLrm
m
r
= és σ rsrs
r
r m
rrm
LL
L LL
k= =−
= −1 .
Az eredő kapcsolódási tényező k k k LLLm rm
m
r
= =2
,
az eredő szórási tényező σ = − = −1 12
k LLL
m
r
,
vagyis σ= σs +σr - σsσr. A szórás (szórási tényező) a szórt mágneses térben felhalmozott energiából is számítható. Tranziens reaktanciák és időállandók Átmeneti folyamatok (indítás, fékezés, szögsebesség- vagy nyomatékváltozás) ideje alatt tranziens egyenáramú komponensek keletkeznek az álló- és a forgórészben. Míg az alapharmonikus feszültséggel egy (vagy egy eredő) indukált feszültség tart egyensúlyt, az egyenáramú összetevőkkel szemben nincs ilyen ellenfeszültség. Ez az egyenáramok szem-pontjából rövidzárt jelent.
Ls Lrs
LmL'
Ls Lrs
Lm Lr'
Álló- és forgórész tranziens reaktancia a helyettesítő áramköri vázlaton
KAUVH12DNM Villamos hajtások 2017
14
Az állórész egyenáramú fluxuskomponense (váltakozó) feszültséget indukál a w szögsebes-séggel forgó forgórészben, és fordítva, a forgórész egyenáramú fluxuskomponense is (válta-kozó) feszültséget indukál az állórész tekercseiben. Az állórész egyenáramú fluxuskomponense és az általa indukált feszültség csillapodását az állórész eredő ohmos el-lenállása és az ún. tranziens induktivitása határozza meg. Részletes számítások alapján az állórész L' tranziens induktivitása megegyezik a gép rövidzárási induktivitásával. A forgórészen a forgórész paraméterei a meghatározók, a szimmetria miatt a forgórész Lr' tranziens induktivitása az állórész rövidrezárt állapotának megfelelő induktivitással egyenlő. A tranziens paramétereket itt vesszőzéssel jelöljük.
( )′ = +
+= +
−= − = −
=L L L L
L LL
L L LL
L LL
L LLL
Lsm rs
m rss
m r m
r
m
r
m
r
2 2
1 σ ,
( )′ = +
+= +
−= − = −
=L L L L
L LL
L L LL
L LL
L LLL
Lr rsm s
m srs
m mr
mr
m
rr
2 2
1 σ .
A helyettesítő áramkör nyitott kapcsaival számíthatók az üresjárási, a tranziens induktivitá-sokkal pedig a tranziens időállandók:
üresjárási tranziens időállandó
állórész T LR
= ′ =′T L
R
forgórész T LRr
r
r0 = ′ =
′T LRr
r
r
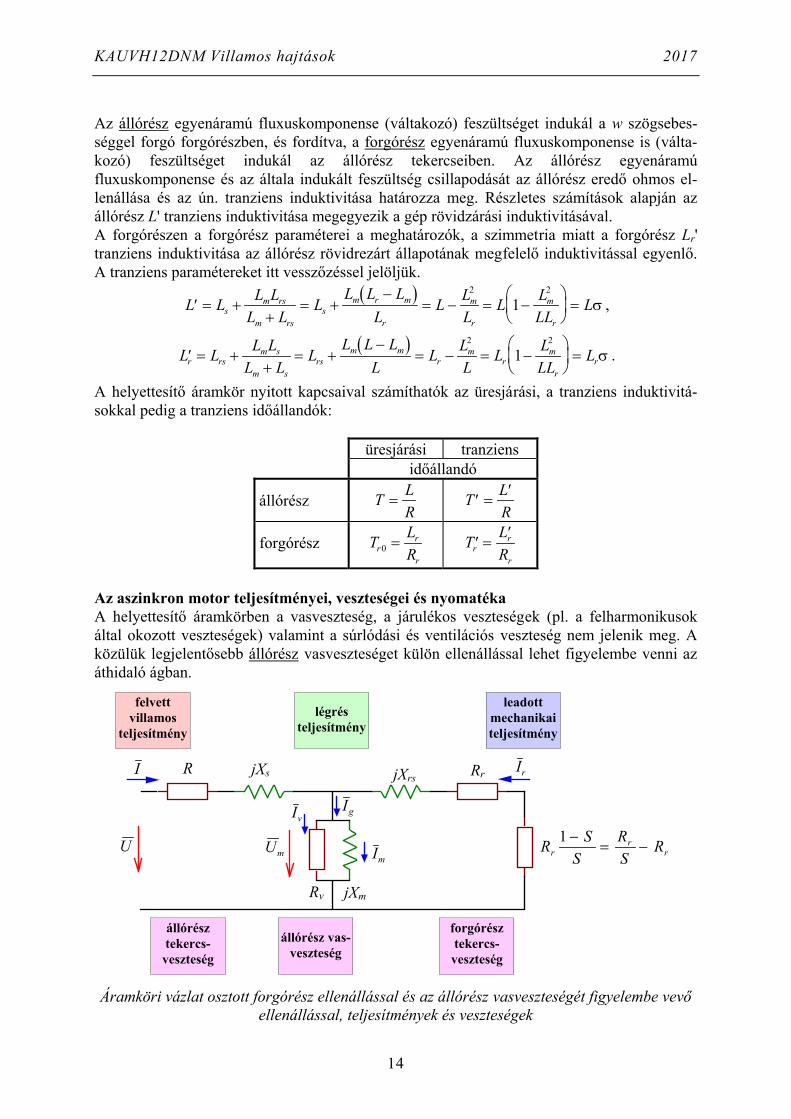
Az aszinkron motor teljesítményei, veszteségei és nyomatéka A helyettesítő áramkörben a vasveszteség, a járulékos veszteségek (pl. a felharmonikusok által okozott veszteségek) valamint a súrlódási és ventilációs veszteség nem jelenik meg. A közülük legjelentősebb állórész vasveszteséget külön ellenállással lehet figyelembe venni az áthidaló ágban.
Rv
R jXs jXrs
jXm
R SS
RS
Rrr
r1 −
= −
RrI
ImUmU
IgIv
Ir
felvettvillamos
teljesítmény
légrésteljesítmény
leadottmechanikaiteljesítmény
állórésztekercs-veszteség
állórész vas-veszteség
forgórésztekercs-veszteség
Áramköri vázlat osztott forgórész ellenállással és az állórész vasveszteségét figyelembe vevő
ellenállással, teljesítmények és veszteségek
ASZINKRON MOTOROS HAJTÁSOK (1. rész)
15
A forgórész vasvesztesége az alacsony névleges üzemi rotorfrekvencia miatt 2-5 %, általában elhanyagolható. A légrés teljesítmény szétválasztható forgórész tekercsveszteségre és mechanikai teljesít-ményre, utóbbi a súrlódási veszteség elhanyagolásával megegyezik a leadott tengelyteljesít-ménnyel. Ezt a forgórészköri ellenállás megosztásával lehet szemléltetni:
RS
R R SS
rr r= +
−1 .
forgórészrézvesz-
teség
állórészrézvesz-
teség
állórészvasvesz-
teség
súrlódásiveszteség
felvettvillamos
teljesítmény
leadottmechanikaiteljesítmény
légrés-teljesítmény
Az aszinkron motor teljesítményei és veszteségei a helyettesítő vázlat közelítésével
Az összes veszteség százalékában
A felvett teljesítmény százalékában
állórész tekercsveszteség 40% 6,1% forgórész tekercsveszteség 25% 3,6% vasveszteség 20% 3,0% súrlódási és ventilációs veszteség 5% 0,7% járulékos veszteségek 10% 1,4% összes veszteség 100% 14,8%
Egy 3 fázisú, 4 pólusú, 5 HP teljesítményű, η=0,852 hatásfokú motor tipikus energia- és vesz-teségi viszonyai
Teljesítmények és veszteségek Az állórész által a táphálózatból felvett Pfel hatásos teljesítményből a Pl légrésteljesítmény jut a forgórészbe, ahol veszteséggé és a tengelyen leadott mechanikai teljesítménnyé alakul.
P P P P UIfel Cu Fe= + + =l
32
, P á r2
l = + + = =P P P U I I RSrCu mech j r m
r32
32
.
Az állórész és forgórész tekercsveszteség (rézveszteség) a helyettesítő áramkörnek megfele-lően:
P I RCu2=
32
, P I R SPrCu r r= =32
2l .

KAUVH12DNM Villamos hajtások 2017
16
Az állórész vasveszteség az áthidaló ág feszültségével számítható, a mechanikai teljesítmény a légrésteljesítménynek a forgórész tekercsveszteségével csökkentett része:
P URFe
m2
v
=32
, ( )P P P S P I SS
Rmech teng s rl r r= + = − =−
ú 1 32
12l .
A légrésnyomaték ( ) ( )( )
MPw
Pw
P Sw
P Sw S
Pw
p Pw
teng
m
mech
m m m m
= ≈ ≈−
=−−
= =l l l l1 1
11 1 1
,
M pw
I RSr
r=32 1
2 .
Az aszinkron gép állandósult állapoti nyomatéka A nyomaték a Pm mechanikai teljesítmény és a wm forgórész mechanikai szögsebesség hánya-dosa:
( )( )
M Pw
P Sw S
Pw
mech
m m m
= =−−
=l l111 1
,
megegyezik a légrésteljesítmény és a mechanikai szinkron szögsebesség hányadosával.
M Iw
RS
pw
I RS
r
m
rr
r= =32
32
2
1 1
2 .
A helyettesítő vázlat alapján a forgórész áram:
( )I I jX
j X X RS
rm
m rsr
= −+ +
.
Az állórész áram kifejezése állórész feszültséghez rögzített (+) valós tengely esetén:
( )
I U
R jXjX jX R
S
j X X RS
s
m rsr
m rsr
=
+ ++
+ +
.
A forgórész áram Park-vektora, behelyettesítve az állórész áram képletét, kisebb átalakítások után:
( )
( )I U
R jXjX jX R
S
j X X RS
jX
j X X RS
r
s
m rsr
m rsr
m
m rsr
= −
+ ++
+ +
+ +=
( )= −
++ +
+ +
=U
R jXjX
j X X RS
jX RS
s
mm rs
rrs
r
= −+ +
++
+ +
=U
R jX R jXjX
jX RS
jX RSs
s
mrs
rrs
r
= −+ + +
++
U
R jX jX RS
R jXjXs rs
r s
m
1.

ASZINKRON MOTOROS HAJTÁSOK (1. rész)
17
R jXjX
XX
s
m
s
m
+≈ ≈ σ közelítéssel és azt feltételezve, hogy: Lm » Ls:
I UR j X jX R
S
rs
rsr
= −+
++
++ +
=1
1
1 1σ
σ σ
−+
++ + +
+
UR R
Sj X Xr
rss1
1
1 1σ
σ σ
R R
1+≈
σ és
X X X XXX
X X XX X
X X XX
Xrss
rss
s
m
rss m
s mrs
s mr+
+≈ +
+= +
+= + =
1 1σ' közelítéssel:
I U
R RS
jXr
rr
= −+ + +1
1σ '
A motor nyomatéka ezzel:
M Iw
RS
r
m
r=32
2
1
( )M
wU
RS
R RS
Xm
r
rr
=+
+
+=
32
111
2
2 22σ '
( )
32 11
2
2 22
pw
URS
R RS
X
r
rr
++
+σ '
M
S
Az aszinkron gép statikus M(S) jelleggörbéje
Az összefüggésből megállapítható, hogy - M ≈ U2 – a nyomaték arányos a tápfeszültség négyzetével,
- RS
r =áll. esetén a nyomaték (U=állandó mellett) állandó,
KAUVH12DNM Villamos hajtások 2017
18
- ha S nagy, akkor RS
r
2
kicsi, ezért MS
~ 1 – a jelleggörbe aszimptotája a szlip na-
gyobb értékeinél hiperbola,
- ha S kicsi, akkor RS
r
2
nagy, ezért M ~ S – a jelleggörbe aszimptotája a szlip kisebb
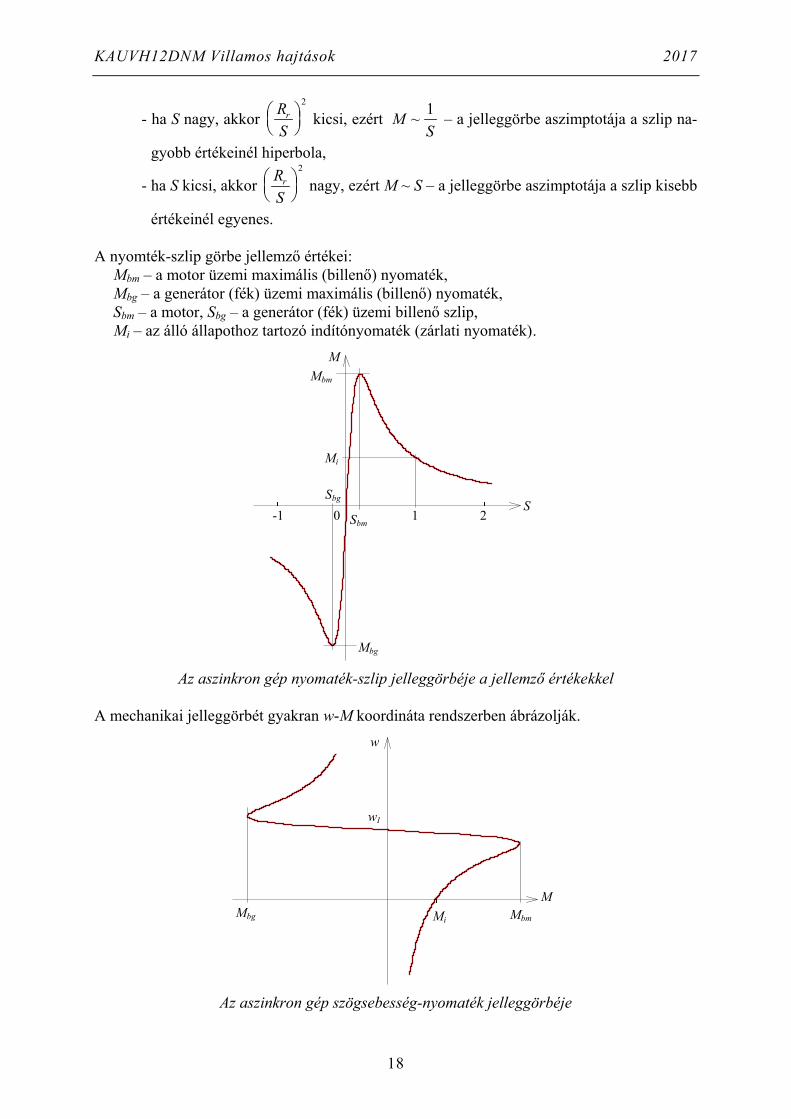
értékeinél egyenes. A nyomték-szlip görbe jellemző értékei:
Mbm – a motor üzemi maximális (billenő) nyomaték, Mbg – a generátor (fék) üzemi maximális (billenő) nyomaték, Sbm – a motor, Sbg – a generátor (fék) üzemi billenő szlip, Mi – az álló állapothoz tartozó indítónyomaték (zárlati nyomaték).
M
S0-1 1 2
Mbm
Mbg
Sbm
Sbg
Mi
Az aszinkron gép nyomaték-szlip jelleggörbéje a jellemző értékekkel
A mechanikai jelleggörbét gyakran w-M koordináta rendszerben ábrázolják.
M
w1
MbmMbg Mi
w
Az aszinkron gép szögsebesség-nyomaték jelleggörbéje

ASZINKRON MOTOROS HAJTÁSOK (1. rész)
19
A maximális (billenő) nyomaték számítása: A nyomatéknak a szlip függvényében szélső értékei vannak – Mb=M(Sb),
( )dMdS
pw
URS
R RS
X R RS
RS
RS
R RS
X
r rr
r r r
rr
= =+
− +
+
+ +
+
+
0 32 1
2
1
2
2
2
22
2
22
2σ
'
'
.
A szélső értékek helyét a számláló zérus értékéből kapjuk:
− +
+
+ +
=RS
R RS
X R RS
RS
RS
r rr
r r r2
22
22 0' ,
R RS
R RS
RS
Xr r rr+
+ −
+ =2 02' ,
R RS
R RS
Xr rr+
−
+ =' 2 0 ,
R RS
Xrr
22
2
2 0− + =' , ebből ( )S R X Rr r2 2 2 2 0+ − =' ,
S R
R Xb
r
r
= ±+2 2'
Sb>0 a motor, Sb<0 a féküzemi billenő szlip.
Sb arányos Rr-el, külső forgórészköri ellenállás beiktatásakor a billenő szlip nő, a mechanikai jelleggörbe lágyul. A billenő szlip független a tápfeszültségtől. A billenő nyomaték Mb nagyságát a billenő szlip Sb értékének behelyettesítésével kapjuk:
( )M p
wU R X
R R R X R X Xb
r
r r r
=+
± +
± + + + +=
32 1 21
2
2
2 2
2 2 2 2 2 2σ
'
' ' '
( )=
+
± +
+ ± +
=
32 1 21
2
2
2 2
2 2 2 2
pw
U R X
R X R R X
r
r rσ
'
' '
( )=
+ ± +
32 1
1
21
2
22 2
pw
U
R R Xrσ '
(+ motor, - féküzemben).
A billenő nyomaték nagysága erősen függ a tápfeszültségtől, de független a forgórész ellenál-lástól. A motor- és féküzemi billenő nyomaték nem egyforma, arányuk:
MM
R R X
R R X
R
R XR
R X
bm
bg
r
r
r
r
=− +
+ +=
+−
++
=−+
2 2
2 2
2 2
2 2
1
1
11
'
'
'
'
εε
,
itt ε =+
R
R Xr2 2'
.
KAUVH12DNM Villamos hajtások 2017
20
Példa:
a) R=0,05; Xr'=0,5; ezzel ε=0,099≈0,1 ⇒ MM
bm
bg
= − ≅ −0 911
0 8,,
, ,
b) R=0,1; Xr'=0,5; ezzel ε=0,196≈0,2 ⇒ MM
bm
bg
= − ≅ −0 81 2
0 67,,
, ,
c) R=0,05; Xr'=0,1; ezzel ε=0,447 ⇒ MM
bm
bg
= − ≅ −0 5531 447
0 38,,
, .
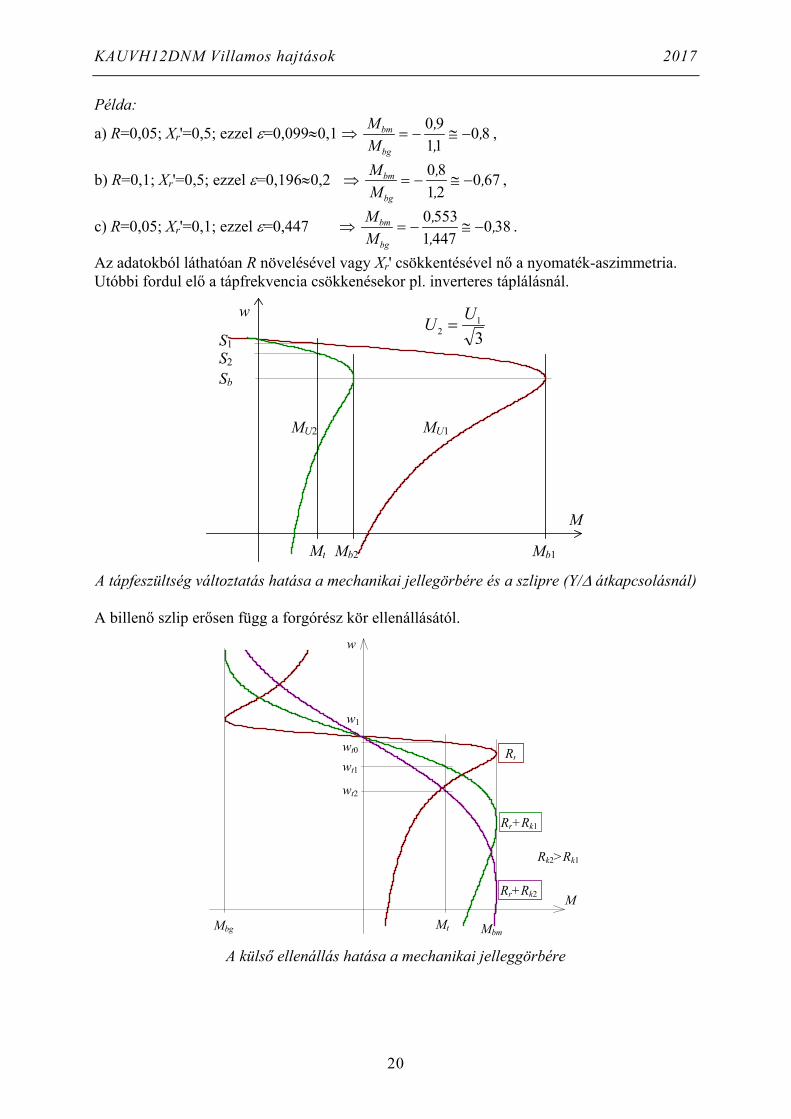
Az adatokból láthatóan R növelésével vagy Xr' csökkentésével nő a nyomaték-aszimmetria. Utóbbi fordul elő a tápfrekvencia csökkenésekor pl. inverteres táplálásnál.
M
w
MU2 MU1
U U2
1
3=
Mb2 Mb1Mt
S1S2
Sb
A tápfeszültség változtatás hatása a mechanikai jellegörbére és a szlipre (Y/∆ átkapcsolásnál) A billenő szlip erősen függ a forgórész kör ellenállásától.
M
w1
MbmMbg
w
Rr
Rr+Rk1
Rr+Rk2
Mt
wt0
wt1
wt2
Rk2>Rk1
A külső ellenállás hatása a mechanikai jelleggörbére

ASZINKRON MOTOROS HAJTÁSOK (1. rész)
21
A nyomatéknak a billenő nyomatékhoz viszonyított aránya:
MM
RS
R RS
XR R X
b
r
rr
r=+
+± +
=2
2
2 22'
'
( )=
± +
+ + +=2
2
2 2
2 2
R R XSR
R X R RS
r
rr
r
'
' 2
1
2
2 2
2 2
R
R XSS
R
R X
SS
r
b r
b
+±
++
+
'
'
.
Ezt az arányt legelterjedtebb formában a Kloss1 képlet fejezi ki: MM S
SSS
b
b
b=
±
+ +2 1
2
ε
ε (+ motor, - féküzemben)
Összeállította: Kádár István 2017. március
1 Kloss, Max német professzor, 1873-1961
KAUVH12DNM Villamos hajtások 2017
22
Ellenőrző kérdések 1. Milyen mágneses teret hoz létre az aszinkron gép álló- és forgórésze? 2. Melyek a forgórész legfontosabb kialakítási típusai, mi az eltérés közöttük? 3. Mi a csúszógyűrű szerepe? 4. Milyen árammal gerjesztik az álló- és a forgórész tekercselését? 5. Mi a szlip, hogyan számítható, ábrázolja a szlip-szögsebesség összefüggést. 6. Állandósult állapotban mekkora a forgórész áram frekvenciája? 7. Milyen kapcsolat van az aszinkron motor pólusszáma és szinkron fordulatszáma között? 8. Írja fel az aszinkron gép állórészének és forgórészének Park-vektoros feszültség egyenletét. 9. Hogyan alakíthatók át az állórész- és a forgórész egyenletek közös koordináta rendszerben
felírt egyenletekké? 10. Írja fel az aszinkron gép Park-vektoros feszültség egyenleteit közös koordináta rendszer-
ben. 11. Melyek a közös koordináta rendszer szögsebességének megválasztási szempontjai? 12. Rajzolja fel állandósult állapotra az álló- és forgórész egyesített áramköri vázlatát és vek-
torábráját. 13. Hogyan számítható az álló- és a forgórész tranziens reaktanciája, üresjárási és tranziens
időállandója? 14. Állandósult állapotban hogyan számítható az aszinkron motor felvett- légrés- és mechani-
kai teljesítménye a helyettesítő áramkör alapján? 15. Állandósult állapotban hogyan számítható az aszinkron motor álló- és forgórész tekercs-
vesztesége, állórész vasvesztesége a helyettesítő áramkör alapján? 16. Hogyan számítható az aszinkron motor állandósult állapoti nyomatéka a
légrésteljesítményből? 17. Rajzolja fel az aszinkron gép névleges üzemi statikus M(S) és w(M) jelleggörbéjét, me-
lyek a görbék a jellemző értékei? 18. Hogyan függ a billenő szlip a tápfeszültségtől és a forgórész kör ellenállásától? 19. Hogyan függ a billenő nyomaték a tápfeszültségtől és a forgórész kör ellenállásától?
















![Számítógéppel vezérelt projektorok szimulációja asztali ...mono.eik.bme.hu/~samu/publications/031_veszprem.pdf · [ 4 ] Andrew S. Tanenbaum: Számítógép-architektúrák](https://img.dokumen.tips/doc/110x75/5e4c7d64698bb025a834266f/szmtgppel-vezrelt-projektorok-szimulcija-asztali-monoeikbmehusamupublications031.jpg)











