Embed Size (px)
Citation preview

5 2 次正方行列の対角化・三角化とその応用
行列 A を作用させても方向が変わらない直線があったとする.すると,その直線の方向 v に限定すれば A が表す線形変換はベクトルに関する正比例 Av = λv となる.正比例の要である比例定数に相当する λ は 固有値 と呼ばれ,行列 A を特徴付けるものとなる.たとえば,2 次正方行列 A が相異なる 2 つの固有値を持てば A は固有値を成分とする対角行列((i, i) 成分以外は 0 の行列)に変形され,キリッと明快な計算と論理展開が可能になる. さらに,x,y の 2 次方程式の係数から構成される 2 次の実対称行列(p. 25)は必ず対角行列に変形され,2 つの固有値の符号を調べることによって,その 2次方程式が表す曲線が楕円の仲間であるか,双曲線の仲間であるか,放物線の仲間であるかを判定できる.
5.1 固有値と固有ベクトル
≪変換されても変わらない方向≫ 2 次正方行列 A =
(1 41 −2
)が表す線形変
換は det A = −6 6= 0 であるから,まとめ:連立 1 次方程式の解の構造(p.67)より,平面を平面全体に移し(全射),すべての直線を直線に移す(単射).行列 A を作用させても方向が変わらない直線を捜すことからこの節をはじめる.原点を通る直線(
xy
)= t
(ab
)(t は実数),
(ab
)6= 0 (5.1)
は A によって直線(x′
y′
)= tA
(ab
)= t
(a + 4ba − 2b
)(t は実数) (5.2)
に写像される.この 2 つの直線が平行になるのは行列式 det
(a a + 4bb a − 2b
)=
a2 − 3ab− 4b2 = ( − 4b)(a + ) = 0 のとき,すなわち,直線の方向が(
41
)と
(1−1
)のときである.
(ab
)=
(41
)ならば,変換後の直線は
(x′
y′
)= tA
(41
)= 2t
(41
)(t は実数) (5.3)
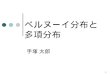
である(Figure 5.1).一方,(
ab
)=
(1−1
)ならば,変換後の直線は
(x′
y′
)= tA
(1−1
)= −3t
(1−1
)(t は実数) (5.4)
72

x
y
O
1
1
−
4
1
方向方向
Figure 5.1: 変換後も変わらない方向
x
y
O
1
1
−
1
1A
−
Figure 5.2: 変換後も変わらない方向(固有値が重解)
である.(5.3) や (5.4) をベクトルに関する正比例の形で表現すれば,それぞれ,
A
(41
)= 2
(41
), A
(1−1
)= −3
(1−1
)(5.5)
となるから,(
41
)の方向には向きを保ったまま 2倍に引き伸ばす変換,
(1−1
)の方向には逆向きに 3 倍する変換と考えられる.原点のまわりでの回転を表す線形変換のように,変換の前後で方向が変わら
ない直線が存在しない線形変換もあるが,つぎに考察する固有値と対応する固有ベクトルという形で一般化される.
≪固有値・固有ベクトルの計算≫ A を n 次正方行列とする.このとき,
Av = λv, v 6= 0 (5.6)
を満たす数 λ を A の 固有値,零ベクトルではない n 次ベクトル v を λ に対応する A の 固有ベクトル という.問題 (5.6) は A の固有値問題と呼ばれる.
(5.6) の第 1 式は (A − λI)v = 0 と書き換えられる.まとめ:連立 1 次方程式の解の構造(p.67)より,rank(A − λI) = n ならば v = 0 となる.したがって,rank(A− λI) < n のときに限り,λ は A の固有値となる.2 次正方行
列 A =
(a bc d
)については
rank(A − λI) < 2 ⇐⇒ det(A − λI) =
∣∣∣∣a − λ bc d − λ
∣∣∣∣ = 0
⇐⇒ (a − λ)(d − λ) − bc = 0
⇐⇒ λ2 − (a + d)λ + ad − bc = 0
(5.7)
が固有値 λ を決定する.Tidbit: 行列式と固有多項式(p. 74)で紹介するように (5.7) は 固有多項式 と呼ばれる.固有値 λ が決定したら,連立 1 次方程式
(A − λI)v = 0 (5.8)
を行基本変形によって解いて,固有ベクトル v 6= 0 が得られる.ただし,(5.8)
の定数項はすべて 0 であるから,拡大係数行列ではなく係数行列に行基本変形を施せば十分である.
73

Tidbit: 行列式と固有多項式¶ ³第 3章で面積拡大率を表すものとして 2次正方行列の行列式を導入したが,n次正方行列の行列式も定義され,(5.6)が解を持つための条件 rank(A−λI) <n は n によらず det(A − λI) = 0 と同値である. det(A − λI) = 0 は λ に関する n 次多項式であり,固有多項式と呼ばれる.2 次の固有多項式 (5.7) は 2 次正方行列の固有値を求めるための標準的な道具である.この資料の第 6 章では 体積拡大率 を表現するものとして 3次正方行列の行列式を紹介し,さらに,固有多項式を利用して 3 次正方行列の固有値を求める.ただし,本資料は 4 次以上の高次正方行列の行列式には言及しない.µ ´例題5-1 つぎの行列の固有値と固有ベクトルを求めよ.
(1)
(1 41 −2
) (2)
(3 1−1 1
) (3)
(2 00 2
) (4)
(2√
3 −1
4 2√
3
)
(解答例)各問に対して行列を A と書く.
(1) 固有多項式 det(A − λI) =
∣∣∣∣1 − λ 41 −2 − λ
∣∣∣∣ = 0 を整理した
(λ − 1)(λ + 2) − 4 = λ2 + λ − 6 = (λ − 2)(λ + 3) = 0
から,固有値 λ1 = 2,λ2 = −3が得られる.λ1 = 2に対応する固有ベクトルは,行基本変形
(aaaaaaaa−−−−−→bbbbbbbb
は aaaaaaaa の後に bbbbbbbb をすることを意味する)
A − λ1I =
(−1 41 −4
)(2)+(1)−−−−→
(−1 40 0
)
から v1 = t
(41
)(∀t 6= 0)である.λ2 = −3 に対応する固有ベクトルは,
A − λ2I =
(4 41 1
)(1)/4−−−−→
(2)−(1)A − λ2I =
(1 10 0
)
から v2 = t
(1−1
)(∀t 6= 0)である.なお,{λ1,v1},{λ2,v2} は,それぞれ,
(5.5) の第 1 式,第 2 式に対応する.
(2) 固有多項式 det(A − λI) =
∣∣∣∣3 − λ 1−1 1 − λ
∣∣∣∣ = 0 を整理した
(λ − 3)(λ − 1) + 1 = λ2 − 4λ + 4 = (λ − 2)2 = 0
から,固有値 λ = 2(重解)が得られる.固有ベクトルは,行基本変形
A − λI =
(1 1−1 −1
)(2)+(1)−−−−→
(1 10 0
)74

から v = t
(−11
)(∀t 6= 0)となる.この方向と拡大の様子を Figure 5.2 に示
す.固有値が重解であるため,変換前後で不変な方向が 1 つしかないのが (1)
との違いである.
(3) 固有多項式 det(A − λI) =
∣∣∣∣2 − λ 00 2 − λ
∣∣∣∣ = 0 から固有値は λ = 2(重解)
である.A − λI =
(0 00 0
)よりすべての非零ベクトルが固有ベクトルである.
(4) 固有多項式 det(A − λI) =
∣∣∣∣2√3 − λ −1
4 2√
3 − λ
∣∣∣∣ = 0 を整理した
(λ − 2√
3)2 + 4 = λ2 − 4√
3λ + 16 = 0
から,固有値 λ1 = 2√
3 + 2i,λ2 = 2√
3 − 2i が得られる(i =√−1:虚数単
位).λ1 = 2√
3 + 2i に対応する固有ベクトルは,行基本変形
A − λ1I =
(−2i −14 −2i
)(1)×i−−−−−−→
(2)−2×(1)
(2 −i0 0
)
から v1 = t
(i2
)(∀t 6= 0)である.λ2 = 2
√3− 2i に対応する固有ベクトルは,
行基本変形
A − λ1I =
(2i −14 2i
)−−−−−−→(2)+2i×(1)
(2i −10 0
)から v2 = t
(12i
)(∀t 6= 0)である.
®
©ª課題5-1 つぎの行列の固有値と固有ベクトルを求めよ.
(1)
(3 −52 −4
) (2)
(−1 24 −8
) (3)
(1 22 1
)
®
©ª課題5-2 つぎの行列の固有値と固有ベクトルを求めよ.
(1)
(0 1−1 2
) (2)
(1 −22 −3
)
®
©ª課題5-3(TAチェック) つぎの行列の固有値と固有ベクトルを求めよ.(
1 −11 1
)
75

≪共役複素数・複素ベクトルの内積≫ 複素数 λ = α + iβ (i =√−1:虚数単
位,α,β:実数)に対して虚数部の符号を変えた α − iβ を λ の共役複素数といい λ で表す.また,複素数を成分とする複素ベクトル v の各成分をその共役複素数で置き換えたものを v の共役複素ベクトルといい,v で表す.
2 次の実正方行列の固有多項式 (5.7) は,2 つの相異なる実数解,重解,互いに共役な複素数解を持ちうる.互いに共役な複素固有値(λ2 = λ1)に対応する固有ベクトルも互いに共役な複素ベクトルになるようにできる(v2 = v1).
2 つの複素ベクトル a =
a1
a2...
an
と b =
b1
b2...bn
の内積は,実ベクトルの内積を拡張して,
(a, b) =t ab = a1 b1 + a2 b2 + · · · + an bn (5.9)
と定義される.定義 (5.9) から,複素ベクトルの内積に関するつぎの性質がしたがう. なお,
番号は まとめ:実ベクトルの内積(p. 14)の番号に対応する.
®
©ªまとめ:複素ベクトルの内積¶ ³
λ を複素数,a,b,c を複素ベクトルとする.このときつぎが成り立つ.
(1) (a, b + c) = (a, b) + (a, ) (2) (a + b, c) = (a, c) + ( , c)
(3−1) (λa, b) = λ(a, b) (3−2) (a, λb) = λ(a, b)
(4) (a, b) = (b, a)
(5) (a, a) ≥ 0 であり,等号は a = のときのみ成立µ ´5.2 固有ベクトルの線形独立性
≪簡単な例≫ 2 次正方行列 A =
(1 41 −2
)は相異なる固有値 λ1 = 2,λ2 = −3
を持ち,対応する固有ベクトルは,それぞれ,v1 =
(41
),v2 =
(1−1
)であっ
た.この 2つの固有ベクトルを並べた行列の行列式は det(v1 v2
)=
∣∣∣∣4 11 −1
∣∣∣∣ =
−6 6= 0 であるから v1,v2 は線形独立である.
≪相異なる固有値に対応する固有ベクトル≫ 一般の n 次正方行列の固有ベクトルの線形独立性はつぎのようにまとめられる.
76

®
©ªまとめ:固有ベクトルの線形独立性¶ ³
n 次正方行列 A の相異なる固有値 λ1,λ2,· · ·,λr に対応する固有ベクトル v1,v2,· · ·,vr は線形独立である.µ ´
(まとめ:固有ベクトルの線形独立性の証明) (A − λjI)vk = (λk − λj)vk(1 ≤j ≤ r,1 ≤ k ≤ r)であることを利用して,もし
a1v1 + a2v2 + · · · + arvr = 0 (5.10)
ならば a1 = a2 = · · · = ar = 0 であることを示そう.(5.10) の左から (A−λ2I) を掛けると,(A−λ2I)v2 = (λ2 −λ2)v2 = 0 より
a1(λ1 − λ2)v1 + a3(λ3 − λ2)v3 + · · · + ar(λr − λ2)vr = 0
となる.左から,さらに (A − λ3I),(A − λ4I),· · ·,(A − λrI) を順々に掛ければ,v3,v4,· · ·,vr の係数が順々に 0 になり,つぎに至る.
a1(λ1 − λ4) · · · (λ1 − λ4)(λ1 − λ3)(λ1 − λ2)v1 = 0
λ1,λ2,· · ·,λr は相異なり v1 6= 0 だから a1 = 0 である.同様に,(5.10)
の左から (A − λrI) · · · (A − λ3I)(A − λ1I) を掛ければ a2 = 0 が示され,· · ·,(A− λr−1I) · · · (A− λ2I)(A− λ1I) を掛ければ ar = 0 が示される.(証明終了)
5.3 2 次正方行列の対角化・三角化
≪固有値が相異なる場合≫ 2 次正方行列 A が相異なる固有値 λ1,λ2 を持つ場合を考え,対応する固有ベクトルをそれぞれ v1,v2 とする.
Av1 = λ1v1 Av2 = λ2v2
この 2 つの式は
A(v1 v2
)=
(v1 v2
) (λ1 00 λ2
)と 1 つにまとめて表現できる.P =
(v1 v2
)と置く.まとめ:固有ベクトルの
線形独立性(p. 77)より P は正則だから,上の式の左から P−1 を掛けると
P−1AP =
(λ1 00 λ2
)(5.11)
がしたがう.これを行列 A の対角化という.
≪固有値 λが重解の場合≫ついで 2次正方行列 Aの固有値 λが重解である場合を取り扱う.rank(A−λI) < 2であるので,rank(A−λI) = 0と rank(A−λI) = 1
の場合に分けて考えよう.
rank(A − λI) = 0 とする.すると,A − λI は零行列 O =
(0 00 0
)に等し
いので,A は対角行列 A =
(λ 00 λ
)である.
77

rank(A− λI) = 1 とする.この場合は (5.11) のように A を対角化することはできないが,つぎのように 三角化
P−1AP =
(λ 10 λ
)(5.12)
はできることを示そう.(5.12) を満たす正則行列 P が存在したと仮定してその列ベクトルを v1,v2 と置く.つまり,P =
(v1 v2
)とする.(5.12) の左から
P を掛けると
A(v1 v2
)=
(v1 v2
) (λ 10 λ
)=
(λv1 v1 + λv2
)(5.13)
となる.したがって,v1 は λ に対応する固有ベクトル,v2 は連立 1 次方程式
(A − λI)v2 = v1 (5.14)
の解である.いま (5.14) の係数行列 A− λI のランクは 1 と仮定している.v1
は λ に対応する A の固有ベクトルであるから拡大係数行列(A − λI v1
)のラ
ンクも 1 である.したがって,まとめ:連立 1 次方程式の解の構造(p. 67)より (5.14) の解は存在する.さらに,v1,v2 は線形独立である.なぜならば,v2
が v1 のスカラー倍ならば (5.14) の左辺が零ベクトル 0 になり矛盾に至るからである.したがって,このようにして構成される P =
(v1 v2
)は正則である.
例題5-2 つぎの行列を対角化,または,三角化せよ.
(1)
(1 41 −2
) (2)
(3 1−1 1
) (3)
(2√
3 −1
4 2√
3
)
(解答例)例題5-1で求めた固有値と固有ベクトルを利用して対角化できる.
(1)固有値は λ1 = 2,λ2 = −3,対応する固有ベクトルは,それぞれ,v1 =
(41
),
v2 =
(1−1
)であった.P =
(v1 v2
)=
(4 11 −1
)と置けば,つぎのように対
角化できる.
P−1 =1
5
(1 11 −4
), P−1
(1 41 −2
)P =
(2 00 −3
)
(2) 固有値は λ = 2(重解),対応する固有ベクトルは v1 =
(−11
)であった.
(5.14) を満たす v2 は拡大係数行列の行基本変形(A − λI v1
)=
(1 1 −1−1 −1 1
)(2)+(1)−−−−→
(1 1 −10 0 0
)
78

から,たとえば,v2 =
(0−1
)と選び P =
(v1 v2
)=
(−1 01 −1
)と置けば,
つぎのように三角化できる.
P−1 = −(
1 01 1
), P−1
(3 1−1 1
)P =
(2 10 2
)(3) 固有値は λ1 = 2
√3 + 2i,λ2 = 2
√3 − 2i,対応する固有ベクトルは,それ
ぞれ,v1 =
(i2
),v2 =
(12i
)であった.P =
(v1 v2
)=
(i 12 2i
)と置けば,
つぎのように対角化できる.
P−1 = −1
4
(2i −1−2 i
), P−1
(2√
3 −1
4 2√
3
)P =
(2√
3 + 2i 0
0 2√
3 − 2i
)®
©ª課題5-4 (課題5-1参照)つぎの行列を対角化せよ.
(1)
(3 −52 −4
) (2)
(−1 24 −8
) (3)
(1 22 1
)®
©ª課題5-5(TAチェック) (課題5-2参照)つぎの行列を三角化せよ.
(1)
(0 1−1 2
) (2)
(1 −22 −3
)®
©ª課題5-6(TAチェック) (課題5-3参照)つぎの行列を対角化せよ.(
1 −11 1
)
®
©ªまとめ: 2 次正方行列 A の対角化・三角化¶ ³
(1) 相異なる固有値を持つ 2 次正方行列 A は対角化できる.
(2) 固有値 λ が重解,rank(A − λI) = 0 ならば A は元々対角行列である.
(3) 固有値 λ が重解,rank(A − λI) = 1 ならば A は対角化はできないが,三角化できる.µ ´
5.4 対角化・三角化の応用
≪行列のべき乗≫ 対角行列(
λ1 00 λ2
)のべき乗は
(λ1 00 λ2
)n
=
(λ1
n 00 λ2
n
)79

と簡単に計算できる(ミニ(トレーニング)テスト1,問題4).また,(
λ 10 λ
)という形の三角行列のべき乗も(
λ 10 λ
)n
=
(λn nλn−1
0 λn
)と計算される(宿題1,問題2).一般の 2 次正方行列のべき乗の計算は,行列の対角化・三角化によって見通
しが良くなる.実際,A がある正則行列 P によって P−1AP = D と対角化あるいは三角化されたとする.ここに D は対角行列か上の形の三角行列である.すると,A = PDP−1 だから,つぎのようにして A のべき乗 An が計算される.
A2 = (PDP−1)2 = (PDP−1)(PDP−1) = PD(P−1P )DP−1
= PDIDP−1 = PD2P−1
A3 = (PDP−1)3 = (PDP−1)(PDP−1)(PDP−1)
= PD(P−1P )D(P−1P )DP−1 = PDIDIDP−1 = PD3P−1
· · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · ·An = (PDP−1)n = (PDP−1)(PDP−1) · · · (PDP−1)(PDP−1) = PDnP−1
例題5-3 つぎの行列のべき乗を計算せよ.
(1)
(1 41 −2
) (2)
(3 1−1 1
) (3)
(2√
3 −1
4 2√
3
)
(解答例)例題5-2で行った対角化・三角化を利用する.
(1) P =
(4 11 −1
)と置けば P−1 =
1
5
(1 11 −4
),
(1 41 −2
)= P
(2 00 −3
)P−1
であった.したがって,(1 41 −2
)n
= P
(2 00 −3
)n
P−1 =
(4 11 −1
)(2n 00 (−3)n
)P−1
=
(2n+2 (−3)n
2n −(−3)n
)1
5
(1 11 −4
)より,つぎが得られる.(
1 41 −2
)n
=1
5
(2n+2 + (−3)n 2n+2 − 4(−3)n
2n − (−3)n 2n + 4(−3)n
)
80

(2) P =
(−1 01 −1
)と置けば P−1 = −
(1 01 1
),
(3 1−1 1
)= P
(2 10 2
)P−1
であった.したがって,つぎのようにべき乗を計算できる.(3 1−1 1
)n
= P
(2 10 2
)n
P−1 =
(−1 01 −1
)(2n n2n−1
0 2n
)P−1
=
(−2n −n2n−1
2n (n − 2)2n−1
)(−1 0−1 −1
)=
((n + 2)2n−1 n2n−1
−n2n−1 (2 − n)2n−1
)
= 2n−1
(n + 2 n−n 2 − n
)
(3) P =
(i 12 2i
)と置けば P−1 = − 1
4
(2i −1−2 i
),
(2√
3 −1
4 2√
3
)= P
(2√
3 + 2i 0
0 2√
3 − 2i
)P−1
であった.α = π/6,β = cos α + i sin α とおく.ド・モアブルの公式などより
βn = cos nα + i sin nα
β = cos α − i sin α = cos(−α) + i sin(−α)
βn = cos(−nα) + i sin(−nα) = cos(nα) − i sin(nα) = βn
βn + βn = 2 cos(nα) = 2 cos(nπ
6), βn − βn = 2i sin(nα) = 2i sin(
nπ
6)
であることに注意する.2√
3 + 2i = 4
(√3
2+ i
1
2
)= 4β,2
√3 − 2i = 4β であ
る.この表現を利用してべき乗の計算を行うとつぎのようになる.(2√
3 −1
4 2√
3
)n
= P
(4β 00 4β
)n
P−1 = 4n
(i 12 2i
)(βn 00 βn
)P−1
= 4n
(iβn βn
2βn 2iβn
)(−1
4)
(2i −1−2 i
)
= −4n−1
(−2(βn + βn) −i(βn − βn)4i(βn − βn) −2(βn + βn)
)
= −4n−1
(−4 cos(nα) 2 sin(nα)
−8 sin(nα) −4 cos(nα)
)= 4n−1
4 cosnπ
6−2 sin
nπ
6
8 sinnπ
64 cos
nπ
6
81

®
©ª課題5-7 (課題5-4参照)つぎの行列のべき乗を計算せよ.
(1)
(3 −52 −4
) (2)
(−1 24 −8
) (3)
(1 22 1
)
®
©ª課題5-8(TAチェック) (課題5-5参照)つぎの行列のべき乗を計算
せよ.
(1)
(0 1−1 2
) (2)
(1 −22 −3
)
®
©ª課題5-9(TAチェック) (課題5-6,宿題2参照)行列
(1 −11 1
)の
べき乗を計算し,実行列で表せ.
≪数列の一般項≫ つぎの漸化式で定まる数列 xn を考える.
xn+1 = −2xn (n = 0, 1, 2, · · · ) (5.15)
xn は公比 −2 の等比数列であるから,一般項は初項 x0 と n によって
xn = (−2)nx0 (n = 0, 1, 2, · · · ) (5.16)
と表される.つぎに,2 つの漸化式{xn+1 = 3xn + yn
yn+1 = −xn + yn
(n = 0, 1, 2, · · · ) (5.17)
で定まる数列 xn,yn を考えよう.A =
(3 1−1 1
)と置けば,この漸化式は
(xn+1
yn+1
)= A
(xn
yn
)(n = 0, 1, 2, · · · ) (5.18)
と書き換えられ,一般項は初項(
x0
y0
)と n によって
(xn
yn
)= An
(x0
y0
)(n = 0, 1, 2, · · · )
と与えられる.この行列のべき乗 An =
(3 1−1 1
)n
は例題5-3 (2) で計算し
た.これを利用すれば,たとえば,初項(
x0
y0
)=
(11
)のとき,(5.17) の一般
項は (xn
yn
)= 2n−1
(n + 2 n−n 2 − n
)(11
)= 2n−1
(2n + 22 − 2n
)= 2n
(n + 11 − n
)82

と表現される.
例題5-4 つぎの数列の一般項を求めよ.
(1)
(x0
y0
)=
(1
1
),
{xn+1 = xn + 4yn
yn+1 = xn − 2yn
(n = 0, 1, 2, · · · )
(2)
(x0
y0
)=
(1
2
),
{xn+1 = 2
√3xn − yn
yn+1 = 4xn + 2√
3yn
(n = 0, 1, 2, · · · )
(解答例)(1) 例題5-3 (1) の計算結果より一般項はつぎのようになる.(xn
yn
)=
(1 41 −2
)n (11
)=
1
5
(2n+2 + (−3)n 2n+2 − 4(−3)n
2n − (−3)n 2n + 4(−3)n
)(11
)
=1
5
(2n+3 + (−3)n+1
2n+1 − (−3)n+1
)(2) 例題5-3 (3) の計算結果より一般項はつぎのようになる.(
xn
yn
)=
(2√
3 −1
4 2√
3
)n (1
2
)= 4n−1
4 cosnπ
6−2 sin
nπ
6
8 sinnπ
64 cos
nπ
6
(1
2
)
= 4n−1
4 cosnπ
6− 4 sin
nπ
6
8 sinnπ
6+ 8 cos
nπ
6
= 4n√
2
cos(nπ
6+
π
4)
2 sin(nπ
6+
π
4)
®
©ª課題5-10 (課題5-7参照)つぎの数列の一般項を求めよ.
(1)
(x0
y0
)=
(1
2
),
{xn+1 = 3xn − 5yn
yn+1 = 2xn − 4yn
(n = 0, 1, 2, · · · )
(2)
(x0
y0
)=
(1
2
),
{xn+1 = −xn + 2yn
yn+1 = 4xn − 8yn
(n = 0, 1, 2, · · · )
(3)
(x0
y0
)=
(1
2
),
{xn+1 = xn + 2yn
yn+1 = 2xn + yn
(n = 0, 1, 2, · · · )
®
©ª課題5-11 (課題5-8参照)つぎの数列の一般項を求めよ.
(1)
(x0
y0
)=
(2
1
),
{xn+1 = yn
yn+1 = −xn + 2yn
(n = 0, 1, 2, · · · )
(2)
(x0
y0
)=
(1
2
),
{xn+1 = xn − 2yn
yn+1 = 2xn − 3yn
(n = 0, 1, 2, · · · )
83

®
©ª課題5-12 (課題5-9参照)つぎの数列の一般項を求めよ.(
x0
y0
)=
(√3
1
),
{xn+1 = xn − yn
yn+1 = xn + yn
(n = 0, 1, 2, · · · )
5.5 2 次の実対称行列の直交行列による対角化
≪直交行列と正規直交系≫ tPP = P tP = I を満たす実正方行列 P を 直交行列 という.この条件は P の転置行列が P の逆行列であることを示す.
≪直交行列は合同変換を表す≫たとえば,つぎの行列は 2次の直交行列である.(−1 00 1
),
(1 00 −1
),
(cos θ − sin θsin θ cos θ
),
(cos θ sin θsin θ − cos θ
)左から順番に,y 軸に関する対称変換,x 軸に関する対称変換,原点のまわりに θ だけ回転する変換,x 軸に関する対称変換の後に原点のまわりに θ だけ回転する変換を表す行列である.これらの例には,変換前後の図形が合同であるという共通の性質があるが,実は,以下に示すように,すべての直交行列は任意の図形を合同な図形に移す合同変換を表す.実際,P を直交行列,x,y を任意のベクトルとすると
内積 (Px, Py) =t (Px)(Py) = tx(tPP )y = txy = (x,y) (5.19)
である.ここで x = y としてみれば,直交行列はベクトルの長さを変えないことが分かる.さらに,2 つのベクトルの内積も変えないから,ベクトルがなす角も変えない.これは直交行列がすべての図形を合同な図形に写像することを意味している(Figure 5.3 参照).
θ x
y
θ′
, , P P θ θ′= = =x x y y
P
Py
Px
Figure 5.3: 直交行列は合同変換を表す
≪直交行列の列ベクトルと行ベクトルの正規直交性≫ n 次の直交行列 P の第j 列ベクトルを vj (j = 1, 2, · · · , n)とする.すると,
tPP =
tv1tv2...
tvn
(v1 v2 · · · vn
)=
tv1v1
tv1v2 · · · tv1vntv2v1
tv2v2 · · · tv2vn...
.... . .
...tvnv1
tvnv2 · · · tvnvn
84

つまり,tPP の (i, j) 成分は tvivj である.したがって,条件 tPP = I は
内積 (vi,vj) =
{1 (i = j)0 (i 6= j)
(5.20)
を意味する.すなわち,v1,v2,· · ·,vn はすべて長さ 1のベクトルであり,しかも,互いに直交してしている.このようなベクトルの組は 正規直交系 と呼ばれる.つぎに,直交行列の行ベクトルの性質を調べよう.n 次直交行列 P の第 i
行ベクトルを ui (i = 1, 2, · · · , n)とする.すると,
P tP =
u1
u2...
un
(tu1
tu2 · · · tun
)=
u1
tu1 u1tu2 · · · u1
tun
u2tu1 u2
tu2 · · · u2tun
......
. . ....
untu1 un
tu2 · · · untun
つまり,P tP の (i, j) 成分は ui
tuj である.したがって,条件 P tP = I は
内積 (ui,uj) =
{1 (i = j)0 (i 6= j)
(5.21)
を意味する.すなわち,行ベクトル u1,u2,· · ·,un も正規直交系である.以上より,直交行列の列ベクトル全体は正規直交系,行ベクトル全体も正規直交系 であることが示された.
≪ 2 次の直交行列の決定≫ 2 次の直交行列 P =
(p qr s
)をすべて求めよう.
p2 + r2 = 1 より p = cos θ,r = sin θ となる θ が存在する.また,q2 + s2 = 1
より q = cos α,s = sin α となる α が存在する.P の第 1 列ベクトルと第 2 列ベクトルは直交するから
0 = pq + rs = cos θ cos α + sin θ sin α = cos(θ − α),
したがって,θ−α =π
2+nπ(n = 0,±1,±2, · · ·)である.θ−α =
π
2+(2n+1)π
ならば,cos α = cos(θ − π
2− π) = − sin θ,sin α = sin(θ − π
2− π) = cos θ より
P =
(cos θ − sin θsin θ cos θ
)(5.22)
である.一方,θ − α =π
2+ 2nπ ならば,cos α = cos(θ − π
2) = sin θ,sin α =
sin(θ − π
2) = − cos θ より P はつぎのようになる.
P =
(cos θ sin θsin θ − cos θ
)(5.23)
85

®
©ªまとめ: 2 次の直交行列¶ ³
2 次の直交行列は原点のまわりの回転変換を表す行列 (5.22) か座標軸に関する対称移動と原点のまわりの回転変換の合成を表す行列 (5.23):(
cos θ sin θsin θ − cos θ
)=
(cos θ − sin θsin θ cos θ
)(1 00 −1
)のいずれかである.
µ ´®
©ª課題5-13(
0.8 0.6r s
)が直交行列になるように r,s の値を定めよ.
®
©ª課題5-14 つぎの行列が直交行列であるか否かを判定せよ.また,直交行
列である場合には,適切な角 θ を使って (5.22) か (5.23) の形に書き直せ.
(1)1
2
(√3 1
1√
3
)(2)
1
2
(√3 1
1 −√
3
)(3)
1
2
(√3 1
−1√
3
)
(4)1
2
(√3 1
−1 −√
3
)(5)
1
2
(−√
3 1
1√
3
)(6)
1
2
(−√
3 1
1 −√
3
)
(7)1
2
(−√
3 1
−1√
3
)(8)
1
2
(−√
3 1
−1 −√
3
)(9)
(−1 00 −1
)
(10)
(1 00 −1
)(11)
(0 1−1 0
)(12)
(0 11 0
)
≪ 2 次の実対称行列の固有値≫ 2 次の実対称行列 A =
(a bb d
)の固有多項式
は,det(A − λI) = (λ − a)(λ − d) − b2 より
λ2 − (a + d)λ + ad − b2 = 0 (5.24)
となる.判別式は D = (a + d)2 − 4ad + 4b2 = (a − d)2 + 4b2 ≥ 0 であるので,固有値は実数 である.判別式が 0 になるのは a = d,b = 0 の場合だけに限る.
したがって,スカラー行列 A =
(a 00 a
)の固有値だけが重解になり,それ以外
の実対称行列は相異なる実固有値を持つ.
≪ 2 次の実対称行列の固有ベクトル≫ スカラー行列については,すべての非零
ベクトルが固有ベクトルであるから,たとえば,v1 =
(10
),v2 =
(01
)と選
べば,2 つの固有ベクトルが正規直交系になる.スカラー行列ではない 2 次の実対称行列 A の相異なる固有値を λ1,λ2,対
応する固有ベクトルをそれぞれ v1,v2 とする.すると,
λ1(tv1v2) = t(λ1v1)v2 = t(Av1)v2 = tv1
tAv2 = tv1(Av2) = λ2(tv1v2) (5.25)
86

である.λ1 6= λ2 より,(5.25) は tv1v2 = 0,つまり,v1 と v2 が直交することを意味する.したがって,正規直交系になるように 2 つの固有ベクトル v1,v2 を選ぶことができる.
≪ 2 次の実対称行列の回転行列による対角化≫ 2 次の実対称行列の固有ベクトル v1,v2 は P =
(v1 v2
)が直交行列になるように選べるだけではなく,−v2
も固有ベクトルであるから P =(v1 v2
)が原点のまわりの回転を表すように
できる.したがって,2 次の実対称行列は原点のまわりでの回転を表す回転行列によって対角化できる.
例題5-5 つぎの実対称行列を回転行列によって対角化せよ.
(1)1
4
(9
√3√
3 11
) (2)
1
4
(1 5
√3
5√
3 11
) (3)
1
2
(4 −2−2 1
)(解答例)各問に対して行列を A と書く.
(1) 固有多項式 det(A − λI) =
∣∣∣∣9/4 − λ√
3/4√3/4 11/4 − λ
∣∣∣∣ = 0 を整理した
(λ − 9
4)(λ − 11
4) − 3
16= λ2 − 20
4λ +
99 − 3
16
= λ2 − 5λ + 6 = (λ − 3)(λ − 2) = 0
から,固有値 λ1 = 3,λ2 = 2 が得られる.λ1 = 3 に対応する固有ベクトルは
A − λ1I =
(−3/4
√3/4√
3/4 −1/4
)(2)+(1)/
√3−−−−−−→
(1)×4/√
3
(−√
3 10 0
)
から v1 =1
2
(1√3
)と選べる.係数
1
2は |v1| = 1 にするためのものである.
λ2 = 2 に対応する固有ベクトルは
A − λ1I =
(1/4
√3/4√
3/4 3/4
)(2)−
√3×(1)−−−−−−−→
(1)×4
(1
√3
0 0
)
から v2 =1
2
(−√
31
)と選べる.以上より,A は回転行列 P =
(v1 v2
)=cos
π
3− sin
π
3
sinπ
3cos
π
3
によってつぎのように対角化される.tPAP =
(3 00 2
)
(2) 固有多項式 det(A − λI) =
∣∣∣∣1/4 − λ 5√
3/4
5√
3/4 11/4 − λ
∣∣∣∣ = 0 を整理した
(λ − 1
4)(λ − 11
4) − 75
16= λ2 − 12
4λ +
11 − 75
16
= λ2 − 3λ − 4 = (λ − 4)(λ + 1) = 0
87

から,固有値 λ1 = 4,λ2 = −1 が得られる.λ1 = 4 に対応する固有ベクトルは
A − λ1I =
(−15/4 5
√3/4
5√
3/4 −5/4
)(2)+(1)/
√3−−−−−−→
(1)×4/5√
3
(−√
3 10 0
)
から v1 =1
2
(1√3
)と選べる.λ2 = −1 に対応する固有ベクトルは
A − λ1I =
(5/4 5
√3/4
5√
3/4 15/4
)(2)−
√3×(1)−−−−−−−→
(1)×4/5
(1
√3
0 0
)
から v2 =1
2
(−√
31
)と選べる.以上より,A は回転行列 P =
(v1 v2
)=cos
π
3− sin
π
3
sinπ
3cos
π
3
によってつぎのように対角化される.tPAP =
(4 00 −1
)
(3) 固有多項式 det(A − λI) =
∣∣∣∣2 − λ −1−1 1/2 − λ
∣∣∣∣ = 0 を整理した
(λ − 2)(λ − 1
2) − 1 = λ2 − 5
2λ = (λ − 5
2)λ = 0
から,固有値 λ1 =5
2,λ2 = 0 が得られる.λ1 =
5
2に対応する固有ベクトルは
A − λ1I =
(−1/2 −1−1 −2
)(2)−2×(1)−−−−−−→(1)×(−2)
(1 20 0
)
から v1 =1√5
(2−1
)と選べる.λ2 = 0 に対応する固有ベクトルは
A − λ1I =
(2 −1−1 1/2
)(2)+(1)/2−−−−−→
(2 −10 0
)
から v2 =1√5
(12
)と選べる.以上より,A は回転行列 P =
(v1 v2
)=
1√5
(2 1−1 2
)によってつぎのように対角化される.
tPAP =
(5/2 00 0
)
88

®
©ª課題5-15(TAチェック) つぎの実対称行列を回転行列によって対角化
せよ. (7 −3
√3
−3√
3 13
)
®
©ª課題5-16(TAチェック) つぎの実対称行列を回転行列によって対角化
せよ. (0 11 0
)
®
©ª課題5-17(TAチェック) つぎの実対称行列を回転行列によって対角化
せよ. (1 22 4
)
5.6 2 次曲線
≪ x の 2 次方程式≫ はじめに,直線上で x の 2 次方程式
ax2 + 2by + c = 0 (a 6= 0) (5.26)
が表す図形を考える.ここに,(5.26) が表す図形とは (5.26) を満たす点の集合,つまり (5.26) の実数解全体のことである.いうまでもなく,(5.26) を満たす点は,判別式 D = b2 − ac が正ならば 2 つ,D = 0 ならば 1 つあり,D < 0 のときは 1 つもない.
2 次方程式が表す図形の係数への依存性は,簡単な例
x2 + c = 0 (5.27)
を用いてつぎのように説明できる.
(1) c < 0 ならば (5.27) を満たすのは −√−c,
√−c の 2 点である.
(2) c < 0 の範囲で c が増加するにつれて 2 点はしだいに近づき,(3) c = 0 で 2 点は原点で合体して 1 点になる.(4) c > 0 に対しては (5.27) を満たす点は存在しない.
(5.28)
≪空集合≫ 要素が何もない集合を空集合という.c > 0 の場合,(5.27) の左辺は常に正であり,右辺は 0 である.したがって,(5.27) を満たす実数 x は 1 つも存在しないので,この方程式が表す図形は空集合であるという.
≪ x,y の 2 次方程式≫ xy 平面において x と y の 2 次方程式
ax2 + 2bxy + cy2 + dx + ey + f = 0 (5.29)
89

が表す図形を 2 次曲線 という.ここに,a,b,c,d,e,f はすべて定数であり,2 次の項の係数 a,b,c の少なくとも 1 つが 0 ではない.®
©ª課題5-18 xy 平面上の 2 次曲線を表す一般式は (5.29) である.つぎの例
について,a ∼ f の値を求めよ.ただし,α,β は正の定数である.
(1)x2
α2+
y2
β2= 1 (2)
x2
α2+
y2
β2= 0 (3)
x2
α2+
y2
β2= −1
(4)x2
α2− y2
β2= 1 (5)
x2
α2− y2
β2= 0 (6)
x2
α2= 1
(7)x2
α2= 0 (8)
x2
α2= −1 (9)
x2
α2= y
≪交差項 xy の係数が 0 である 2 次方程式が表す 2 次曲線≫ 課題5-18の例のように xy の係数が 0 の場合
ax2 + cy2 + dx + ey + f = 0 (5.30)
について,2 次方程式が表す図形を考えよう.(5.30) とこれに −1 を掛けた 2
次方程式は同じ図形を表す.また,x と y を交換した 2 次方程式は合同な図形を表す.したがって,(5.30) は本質的にはつぎの 3 つに類別される.
(E) 型 a > 0, c > 0 (H) 型 a > 0, c < 0 (P) 型 a > 0, c = 0®
©ª課題5-19 課題5-18の 2 次方程式が (E) 型,(H) 型,(P) 型のいずれ
かであるかを判定せよ.
(E) 型の 2 次方程式が表す図形 まず,
3x2 + 2y2 − 6x + 4y + f = 0 (5.31)
を考える.これを x,y の両方について平方完成して,整理すれば
3(x − 1)2 + 2(y + 1)2 = 5 − f ⇔ (x − 1)2
2+
(y + 1)2
3=
5 − f
6
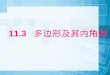
となる.これは,f = −1 のとき Figure 5.4 の左上の楕円を表す.−1 から f
が大きくなるにつれて長径も短径も小さくなり f = 5 では 1 点に縮む.f > 5
のときには (5.31) は空集合を表すことになる.一般の場合も,a 6= 0,c 6= 0 を利用して平方完成すれば,(5.30) は
a
(x +
d
2a
)2
+ c(y +
e
2c
)2
=d2
4a+
e2
4c− f (a > 0, c > 0)
90

と整理される.ここで,x1 = − d
2a,y1 = − e
2c,p =
d2
4a+
e2
4c− f とする.p 6= 0
ならば α =√
|p|/a,β =√|p|/c と置き,p = 0 ならば α =
√1/a,β =
√1/c
と置けば,上式はつぎのようになる.
p > 0 ⇒ (x − x1)2
α2+
(y − y1)2
β2= 1 (楕円)
p = 0 ⇒ (x − x1)2
α2+
(y − y1)2
β2= 0 (1 点)
p < 0 ⇒ (x − x1)2
α2+
(y − y1)2
β2= −1 (空集合)
(5.32)
2 2( 1) ( 1)1
2 3
x y− ++ =
25( 1) 14
y x= − −
22 ( 2)
( 1) 14
yx
++ − =
22 ( 2)
( 1) 04
yx
++ − =
Figure 5.4: (E) 型,(H) 型,(P) 型の 2 次曲線
(H) 型の 2 次方程式が表す図形 まず,
4x2 − y2 + 8x − 4y + f = 0 (5.33)
を考える.これを x,y の両方について平方完成して,整理すれば
4(x + 1)2 − (y + 2)2 = −f ⇔ (x + 1)2 − (y + 2)2
4= −f
4
となる.これは,f = −4のとき Figure 5.4の右上の双曲線(焦点は直線 y = −2
上)を表す.−4 から f が大きくなるにつれて双曲線は 2 本の漸近線に近づき,
91

f = 0 のとき漸近線(Figure 5.4 の左下の交差する 2 直線)と一致する.f > 0
に対しても (5.33) は双曲線を表すが,f < 0 の場合とは異なり,y 軸方向に開いたものとなる.一般の場合も a 6= 0,c 6= 0 を利用して平方完成すれば,(5.30) は
a
(x +
d
2a
)2
+ c(y +
e
2c
)2
=d2
4a+
e2
4c− f (a > 0, c < 0)
と整理される.ここで,x1 = − d
2a,y1 = − e
2c,p =
d2
4a+
e2
4c− f とする.
p 6= 0 ならば α =√|p|/a,β =
√−|p|/c と置き,p = 0 ならば α =
√1/a,
β =√
−1/c と置けば,上式はつぎのようになる.
p > 0 ⇒ (x − x1)2
α2− (y − y1)
2
β2= 1 (x 軸方向に開いた双曲線)
p = 0 ⇒ (x − x1)2
α2− (y − y1)
2
β2= 0 (交差する 2 直線)
p < 0 ⇒ (y − y1)2
β2− (x − x1)
2
α2= 1 (y 軸方向に開いた双曲線)
(5.34)
(P) 型の 2 次方程式が表す図形 a 6= 0 を利用して平方完成すれば (5.30) は
a
(x +
d
2a
)2
+ ey =d2
4a− f (a > 0)
となる.ここで,x1 = − d
2a,p =
d2
4a− f とする.p 6= 0,e = 0 ならば α =√
|p|/a と置き,p = 0,e = 0 ならば α =√
1/a と置く.すると,上式は
p > 0, e = 0 ⇒ (x − x1)2
α2= 1 (平行な 2 直線)
p = 0, e = 0 ⇒ (x − x1)2
α2= 0 (1 直線)
p < 0, e = 0 ⇒ (x − x1)2
α2= −1 (空集合)
e 6= 0 ⇒ y =p
e− a
e(x − x1)
2 (放物線)
(5.35)
となる.Figure 5.4 の右下の放物線は a = 5,d = −10,e = −4,f = 1 の場合である.
以上に示したように,交差項 xy の係数が 0 である 2 次方程式は,必要ならば両辺に −1 を掛けたり,変数 x と y を交換したりし,適切な平方完成をすれば,標準形 と呼ばれる (5.32),(5.34),(5.35) のいずれかに変形できる.
92

®
©ª課題5-20(TAチェック) つぎの 2 次方程式を標準形に変形し,どのよ
うな 2 次曲線を表すか判定せよ.
(1) 9 − x2 − 4y2 + 4x + 24y = 0 (2) 28 − x2 + 4y2 + 4x + 24y = 0
(3) x − 4y2 + 24y − 31 = 0 (4) 13 − 4y2 − 24y = 0
®
©ªまとめ: 交差項の係数が 0 である 2 次方程式が表す図形¶ ³
交差項 xy の係数が 0 である 2 次方程式 ax2 + cy2 + dx + ey + f = 0(|a| + |c| > 0)が表す図形はつぎの通りである.
(E) ac > 0 ならば,楕円,1 点,または,空集合
(H) ac < 0 ならば,双曲線,または,交差する 2 直線
(P) ac = 0 ならば,放物線,平行な 2 直線,1 直線,または,空集合µ ´≪一般の 2 次方程式が表す 2 次曲線≫ x,y の 2次方程式 (5.29)は,例題2-
9(p. 26)で紹介したように,2 次の実対称行列 A =
(a bb c
),1 × 2 実行列
B =(d e
),実数 f を用いて
(x y
)A
(xy
)+ B
(xy
)+ f = 0 (5.36)
の形に書くことができる.また,5.5 2 次実対称行列の直交行列による対角化
(pp. 84 - 89)では 2 次の実対称行列 A は回転を表す行列 P =
(p −qq p
)(p = cos θ,q = sin θ) によって対角化
tPAP =
(λ1 00 λ2
), λ1, λ2 : Aの固有値
されることを学んだ.そこで,(5.29) ≡ (5.36) の x,y に変数変換(xy
)= P
(uv
)(5.37)
を施すと,(5.29) ≡ (5.36) は
(5.36) ⇔(u v
)tPAP
(uv
)+ BP
(uv
)+ f = 0
⇔(u v
) (λ1 00 λ2
)(uv
)+ BP
(uv
)+ f = 0
93

を経て,交差項 uv の係数が 0 である u,v の 2 次方程式
λ1u2 + λ2v
2 + (dp + eq)u + (−dq + ep)v + f = 0 (5.38)
に帰着される.直交行列は合同変換を表すから,u,v の 2 次方程式 (5.38) が表す 2 次曲線は x,y の 2 次方程式 (5.29) ≡ (5.36) が表す 2 次曲線と合同である.より正確には,直交行列 P は原点のまわりの θ だけの回転を表す行列として選んだから,(5.38) が定める uv 平面上の図形を原点のまわりの θ だけの回転したものが (5.29) ≡ (5.36) によって定まる xy 平面上の図形となる.
®
©ªまとめ: 2 次方程式が表す図形¶ ³
実対称行列(
a bb c
)(|a|+ |b|+ |c| > 0)の固有値を λ1,λ2 とする.2 次
方程式 ax2 + 2bxy + cy2 + dx + ey + f = 0 が表す図形はつぎの通りである.
(E) λ1λ2 > 0 ならば,楕円,1 点,または,空集合
(H) λ1λ2 < 0 ならば,双曲線,または,交差する 2 直線
(P) λ1λ2 = 0 ならば,放物線,平行な 2 直線,1 直線,または,空集合µ ´例題5-6 つぎの 2 次方程式を標準形に変形し,どのような 2 次曲線を表
すか判定せよ.
(1)9
4x2 +
√3
2xy +
11
4y2 − (3 + 2
√3)x + (2 − 3
√3)y − 1 = 0
(2)9
4x2 +
√3
2xy +
11
4y2 − (3 + 2
√3)x + (2 − 3
√3)y + 5 = 0
(3)9
4x2 +
√3
2xy +
11
4y2 − (3 + 2
√3)x + (2 − 3
√3)y + 6 = 0
(解答例)A =1
4
(9
√3√
3 11
),B =
(−3 − 2
√3 2 − 3
√3)と置けば,どの方
程式も (5.36) で表現される.(1) なら f = −1,(2) なら f = 5,(3) なら f = 6
である. 例題5-5 (1) によれば A は原点のまわりでの π/3 回転を表す行列
P =1
2
(1 −
√3√
3 1
)によって tPAP =
(3 00 2
)と対角化される.
変数変換(
xy
)= P
(uv
)を施せば,
BP =(−3 − 2
√3 2 − 3
√3) 1
2
(1 −
√3√
3 1
)=
(−6 4
)94

であるから,変換後の 2 次方程式は
3u2 + 2v2 − 6u + 4v + f = 0 ⇔ 3(u − 1)2 + 2(v + 1)2 = 5 − f (5.39)
となる.したがって,(1)は楕円を,(2)は 1点(
1−1
)を,(3)は空集合を表す.
f = −1 のときの (5.39)
(u − 1)2
2+
(v + 1)2
3= 1
が表す楕円を Figure 5.5 左側に示す.これを原点のまわりで π/3 回転したものが (1) で定まる xy 平面上の楕円(Figure 5.5 右側)である.
π/3 回転
O
Ou
v y
x
Figure 5.5: (1) が定める楕円:左は uv 平面上,右は xy 平面上
例題5-7 つぎの 2 次方程式を標準形に変形し,どのような 2 次曲線を表
すか判定せよ.
(1)1
4x2 +
5√
3
2xy +
11
4y2 + (4 + 2
√3)x + (4
√3 − 2)y − 4 = 0
(2)1
4x2 +
5√
3
2xy +
11
4y2 + (4 + 2
√3)x + (4
√3 − 2)y = 0
(3)1
4x2 +
5√
3
2xy +
11
4y2 + (4 + 2
√3)x + (4
√3 − 2)y + 4 = 0
(解答例)A =1
4
(1 5
√3
5√
3 11
),B =
(4 + 2
√3 4
√3 − 2
)と置けば,どの方
程式も (5.36) で表現される.(1) なら f = −4,(2) なら f = 0,(3) なら f = 4
である. 例題5-5 (2) によれば A は原点のまわりでの π/3 回転を表す行列
P =1
2
(1 −
√3√
3 1
)によって tPAP =
(4 00 −1
)と対角化される.
変数変換(
xy
)= P
(uv
)を施せば,
BP =(4 + 2
√3 4
√3 − 2
) 1
2
(1 −
√3√
3 1
)=
(8 −4
)95

であるから,変換後の 2 次方程式は
4u2 − v2 + 8u − 4v + f = 0 ⇔ 4(u + 1)2 − (v + 2)2 = −f (5.40)
となる.したがって,(1),(3) は双曲線を,(2) は交差する 2 直線を表す.
f = −4 のときの (5.40) は (u + 1)2 − (v + 2)2
22= 1 となるが,これが表す
双曲線を Figure 5.6 左側に示す.これを原点のまわりで π/3 回転したものが(1) で定まる xy 平面上の双曲線(Figure 5.6 右側)である.
π/3 回転
O
O
u
v y
x
Figure 5.6: (1) が定める双曲線:左は uv 平面上,右は xy 平面上
f = 0 のときの (5.40) は (u + 1)2 − (v + 2)2
22= 0 となるが,これが表す交
差する 2 直線を Figure 5.7 左側に示す.これを原点のまわりで π/3 回転したものが (2) で定まる xy 平面上の交差する 2 直線(Figure 5.7 右側)である.
π/3 回転
O
O
u
v y
x
Figure 5.7: (2) が定める交差する 2 直線:左は uv 平面上,右は xy 平面上
π/3 回転O O
u
v y
x
Figure 5.8: (3) が定める双曲線:左は uv 平面上,右は xy 平面上
96

f = 4 のときの (5.40) は(v + 2)2
22− (u + 1)2 = 1 となるが,これが表す双
曲線を Figure 5.8 左側に示す.これを原点のまわりで π/3 回転したものが (3)
で定まる xy 平面上の双曲線(Figure 5.8 右側)である.
例題5-8 つぎの 2 次方程式を標準形に変形し,どのような 2 次曲線を表
すか判定せよ.
(1) 2x2 − 2xy +1
2y2 − 2
√5x +
√5y +
1
2= 0
(2) 2x2 − 2xy +1
2y2 − 2
√5x +
√5y +
5
2= 0
(3) 2x2 − 2xy +1
2y2 − 2
√5x +
√5y +
9
2= 0
(4) 2x2 − 2xy +1
2y2 − 12√
5x +
1√5y +
1
2= 0
(解答例)A =1
2
(4 −2−2 1
),B =
(−2
√5
√5)と置けば,(1),(2),(3) は
(5.36) で表現される.(1) なら f = 1/2,(2) なら f = 5/2,(3) なら f = 9/2
である. 例題5-5 (3) によれば A は原点のまわりでの回転を表す行列 P =
1√5
(2 1−1 2
)によって tPAP =
(5/2 00 0
)と対角化される.
変数変換(
xy
)= P
(uv
)を施せば,
BP =(−2
√5
√5) 1√
5
(2 1−1 2
)=
(−5 0
)であるから,変換後の 2 次方程式は
(5/2)u2 − 5u + f = 0 ⇔ 5(u − 1)2 = 5 − 2f (5.41)
となる.したがって,(5.41) は,f = 1/2 のときは平行な 2 直線 u = 1+2/√
5,u = 1 − 2/
√5,f = 5/2 のときは 1 直線 u = 1,f = 9/2 のときは空集合を
表す.
(1),(2),(3) の場合と同じ 2 次対称行列 A を用い,B =
(− 12√
5
1√5
),
f =1
2と置けば (4)も (5.36)で表現される.変数変換
(xy
)= P
(uv
)を施せば,
BP =
(− 12√
5
1√5
)1√5
(2 1−1 2
)=
(−5 −2
)であるから,変換後の 2 次方程式は
(5/2)u2 − 5u − 2v + 1/2 = 0 ⇔ 5(u − 1)2 − 4v = 4 (5.42)
97

となる.したがって,(4) は放物線を表す.この放物線を Figure 5.9 左側に示す.これを原点のまわりで α (cos α = 2/
√5,sin α = −1/
√5)回転したもの
が (4) で定まる xy 平面上の放物線(Figure 5.9 右側)である.
α 回転
O O
u
v y
x
2cos
5α =
1sin
5α =−
Figure 5.9: (4) が定める放物線:左は uv 平面上,右は xy 平面上
®
©ª課題5-21 つぎの 2 次方程式を標準形に変形し,どのような 2 次曲線を
表すか判定せよ(課題5-15参照のこと).
(1) 7x2 − 6√
3xy + 13y2 + 4√
3x + 4y − 12 = 0
(2) 7x2 − 6√
3xy + 13y2 + 4√
3x + 4y + 4 = 0
(3) 7x2 − 6√
3xy + 13y2 + 4√
3x + 4y + 5 = 0
®
©ª課題5-22 つぎの 2 次方程式を標準形に変形し,どのような 2 次曲線を
表すか判定せよ(課題5-16参照のこと).
(1) 2xy + 4√
2x + 2√
2y + 7 = 0 (2) 2xy + 4√
2x + 2√
2y + 8 = 0
(3) 2xy + 4√
2x + 2√
2y + 9 = 0
®
©ª課題5-23 つぎの 2 次方程式を標準形に変形し,どのような 2 次曲線を
表すか判定せよ(課題5-17参照のこと).
(1) x2 + 4xy + 4y2 − 2√
5x +√
5y = 0 (2) x2 + 4xy + 4y2 − 5 = 0
(3) x2 + 4xy + 4y2 = 0 (4) x2 + 4xy + 4y2 + 5 = 0
98