Embed Size (px)
Citation preview

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 1/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-1
Method of Moment Area Equations
Introduction
Perform deformation analysis of flexure-dominated structures
Beams Frames
Provide equations to determine
Displacement Rotation
Basic Assumptions
Small displacement (u,v) and small rotation (θ)
|u/L|, |v/L|, |θ| << 1; L ~ characteristic dimension of the structure
Rotation is approximated by θ = dv/dx
Curvature is approximated by κ = d2v/dx2
Kinematics of the cross section
Plane section remains plane
No shear deformation Plane section always normal to Neutral Axis
NA NA
Deformed stateUndeformed state
Y
X Deformed state
Undeformed state
Deformed state
X
Y
Undeformed state
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-2
Basic Assumptions (Cont.)
No axial deformation (axially rigid members) no change in length of all members
L = Lo
uA = uB
Material behavior
Linearly elastic, i.e. linear stress-strain relation
Isotropic, i.e. material properties are directional independent
Equilibrium of the structure
Equilibrium equations are set up on undeformed state
ε
σ
E = Young Modulus
1
A
B
L
Lo
uA
vA
uB
vB Deformed state
Undeformed state

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 2/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-3
Moment Area Equations
Basic Equations
Kinematics
Plane sections remain plane
Material behavior
Equilibrium of the cross section
Static equilibrium
Moment-Curvature Relation
BMD in terms of applied loads
EI
M
dx
d
dx
v d 2
2
==θ
BMD
L
x
y
A
B
u A
u B
v A
v B
θ A
θ B
u
v
2
2
dx
v d
dx
d ==κ
θ
y κ−=ε
ε=σ E
κ= EI M
qdx
dV = ; V
dx
dM =
I is the moment of inertia of the cross section
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-4
First Moment Area Equation
EI
M
dx
d =
θ
L
A
B
dx
d θ
x
y
M/EI diagram
dx EI
M
dx
Change of angle over the portion dx
Moment-Curvature Relationship
dx EI
M d =θ
Graphical Interpretation

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 3/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-5
First Moment Area Equation (Cont.)
Change of angle over the portion dx dx EI
M d =θ
Total change of angle over the portion AB dx EI
M d
L
0
B
A
∫ ∫ =θθ
θ
AB
M/EI B/A AB Area =θ=θ−θ
Sign Convention and Remarks
θ A, θB are positive when they aremeasured CCW from undeformed
state
θB/A is positive when it is measuredCCW from tangent line from A
Sign convention of bending momentM follows the local coordinate x-y
y
x
M+
y
x
M-
Graphical Interpretation
A
B
M/EI diagram
L
θB/A
θB
θ A x
y
Assume no discontinuity of slopewithin portion AB (e.g. no hinge )
Area under M/EI diagram over portion AB
Total change of angle over the portion AB
1st
MOMENT AREA EQUATION
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-6
Second Moment Area Equation
EI
M
dx
d =
θ
L
A
B
dx
d θ
x
y
M/EI diagram
dx EI
M
dx dt
x
x
L-x
L-x
Change of angle over the portion dx
Moment-Curvature Relationship
dx EI
M d =θ
Graphical Interpretation
dt = deviation of element dx measured
on a normal line at point B
( ) ( ) ⎟
⎠
⎞⎜
⎝
⎛ −=θ−= dx
EI
M x Ld x Ldt
Assume small rotation

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 4/13

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 5/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-9
Length Constraint Equation
No Axial Deformation
Small Displacement and Rotation
No Change in Length of Member
Longitudinal Displacement are Constant
L L =′
B A u u u ==
Graphical Interpretation
L A
B
x
y
u A
u B
u
C
C´ A´
B´ L´
Sign Convention and Remarks
L´ is the length of the member AB measured in the longitudinal directionof the undeformed state of the member
u is the longitudinal component of thedisplacement at any point with themember AB
u A, u A, and u are positive when theydirect in positive x -direction
The real length of the deformed statecan be approximated by the projectedlength L´ provided that displacementand rotation of the member are small
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-10
Application of Moment Area and Length Constraint Equations
Summary of Equations
3 independent equations per member
Remark: The superscript or subscript “AB” is used to emphasize that quantities are associated with the member AB
Kinematical Unknowns
3 unknowns at point A : AB
Au , AB Av , and AB
Aθ
3 unknowns at point B : ABBu , AB
Bv , and ABBθ
Total 6 unknowns per member
The rotations { AB
Aθ , AB
Bθ } and the transverse components of the displacement { AB
Av , AB
Bv }
are related by the 1st and 2nd moment area equations
The longitudinal components of the displacement { AB
Au , AB
Bu } are related by length
constraint equation
AB
M/EI
AB
A
AB
BB/A Area =θ−θ=θ
( ) ( ) B
AB
M/EI AB
AB
A
AB
A
AB
BB/A x Area Lθ v v t ⋅=+−=
( ) ( ) A
AB
M/EI AB
AB
B
AB
B
AB
A A/B x Area Lθ v v t ⋅=−−=
AB
B
AB
A u u =
L AB
A
B
x
y
B x
t B/A
A x
t A/B
M/EI diagram
Centroid 1st Moment Area Equation
2 nd Moment Area Equation
Length Constraint Equation
AB
Aθ
AB
Bθ
AB
Au
AB
Av
AB
Bu
AB
Bv

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 6/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-11
Useful Remarks
Remark1: If one of { AB Au , AB
Bu } is known, the other can be obtained from length
constraint equation
Remark2: If one of { AB
Aθ , AB
Bθ } and one of { AB
Av , AB
Bv } are known, the other two of
{ AB
Aθ , AB
Bθ , AB
Av , AB
Bv } can be computed from the 1st moment area equation and then
follow by the 2 nd moment area equations
Remark3: If { AB
Av , AB
Bv } are known, one of rotations { AB
Aθ , AB
Bθ } is computed from 2 nd
moment area equation and the other rotation is obtained from 1st moment area equations
Remark4: If all three unknowns are known at one end, other three unknowns at theother end of the member can be computed from 1st and 2 nd moment area equations and the length constraint equation
One of { AB Au , AB
Bu } is known Length Constraint Equation
One of { AB
Aθ , AB
Bθ } is known 1st & 2 nd Moment Area
Equations One of { AB
Av , AB
Bv } is known
2 nd Moment Area Equations { AB Av , AB
Bv } are known
1st Moment Area Equations
{ AB
Au , AB
Av , AB
Aθ } are known 1st & 2 nd Moment Area Equations
or
{ AB
Bu , AB
Bv , AB
Bθ } are known Length Constraint Equation
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-12
Useful Remarks (Cont.)
Remark5: If there exists a point within the structure where the rotation and the twocomponents of the displacement are known (e.g. a point at a fixed supports or a pointwhere their rotation and displacement were already computed), the rotations anddisplacements at all other points can be determined from 1st and 2 nd moment area
equations and the length constraint equation
Remark6: A member or a segment used in the calculation must not contain hinge except at its ends
Segments AC and CE (contain hinge inside) are not allowed
Segments AB, BC,CD, and DE (contain hinge at the ends) can be used
A
A
u A=v A=θ A=0
A
u A=v A=θ A=0
B
C D
A
B
C D E
F
8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 7/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-13
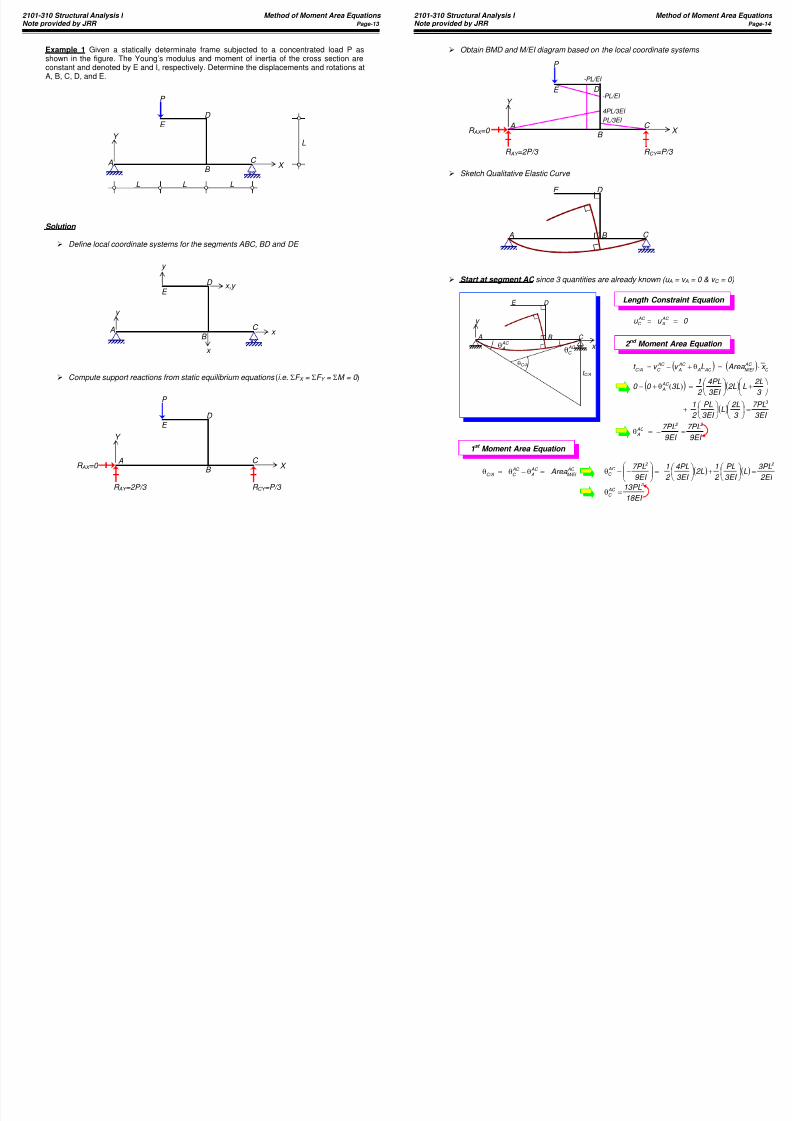
Example 1 Given a statically determinate frame subjected to a concentrated load P asshown in the figure. The Young’s modulus and moment of inertia of the cross section areconstant and denoted by E and I, respectively. Determine the displacements and rotations atA, B, C, D, and E.
Solution
Define local coordinate systems for the segments ABC, BD and DE
Compute support reactions from static equilibrium equations (i.e. ΣF X = ΣF Y = ΣM = 0 )
L
A X B
E
Y
L L
L
C
D
P
x
x
x,y
y
y
AB
E
C
D
AB
E
C
D
X
Y
P
R AX =0
R AY =2P/3 R CY =P/3
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-14
Obtain BMD and M/EI diagram based on the local coordinate systems
Sketch Qualitative Elastic Curve
Start at segment AC since 3 quantities are already known (u A = v A = 0 & v C = 0)
AB
E
C
D
X
Y
P
R AX =0
R AY =2P/3 R CY =P/3
-PL/EI
4PL/3EI
PL/3EI
-PL/EI
A B
E
C
D
Length Constraint Equation 0 u u AC AAC C ==
2 nd Moment Area Equation ( ) ( ) C
AC M/EI AC A
AC A
AC C C/A x Area Lv v t ⋅=+−= θ
( ) ( )
( )3EI
7PL
3
2LL
3EI
PL
2
1
3
2LL2L
3EI
4PL
2
1 3L0 0
3
AC A
=⎟ ⎠
⎞⎜⎝
⎛ ⎟ ⎠
⎞⎜⎝
⎛ +
⎟ ⎠
⎞⎜⎝
⎛ +⎟
⎠
⎞⎜⎝
⎛ =+− )(θ
9EI 7PL
9EI 7PL
2 2 AC A =−=θ
1st Moment Area Equation AC M/EI
AC A
AC C C/A Area =θ−θ=θ ( ) ( )
2EI
3PLL
3EI
PL
2
12L
3EI
4PL
2
1
9EI
7PL 2 2 AC C =⎟
⎠
⎞⎜⎝
⎛ +⎟
⎠
⎞⎜⎝
⎛ =⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−θ
18EI
13PL2 AC C =θ
x
y
A B
E
C
D
θC/A
t C/A
AC Aθ AC
C θ

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 8/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-15
Move to segment AB displacement and rotation at point A are already known
Move to segment BD displacement and rotation at point B are already known
Length Constraint Equation
1st Moment Area Equation
( ) ( ) B AB M/EI AB
AB A
AB A
AB B B/A x Area Lv v t ⋅=+−= θ ( )
9EI
8PL
3
2L2L
3EI
4PL
2
1 2L
9EI
7PL0 v
3
2 AB B
=
⎟ ⎠
⎞⎜⎝
⎛ ⎟ ⎠
⎞⎜⎝
⎛ =⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −+− )(
3EI
2PL
3EI
2PL v
3 3 AB B =−=
2 nd Moment Area Equation
AB M/EI
AB A
AB B B/A Area =θ−θ=θ
( )3EI
4PL2L
3EI
4PL
2
1
9EI
7PL 2 2 AB B =⎟
⎠
⎞⎜⎝
⎛ =⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−θ
9EI
5PL2 AB B =θ
A B
E
C
D
θB/A t B/A
x
y 0 u u AB
AAB B ==
0 v AB
A =
0 u AB A =
9EI
7PL
2 AC A
AB A −=θ=θ
0 u v AB
B
DB
B ==
3EI
2PL v u
3 AB B
DB B =−=
9EI
5PL
2 AB
B
DB
B =θ=θ
AB
Aθ AB B θ
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-16
Move to segment BD displacement and rotation at point B are already known
Length Constraint Equation
1st
Moment Area Equation
2 nd Moment Area Equation
DB M/EI
DB D
DB B B/D Area =θ−θ=θ
( )EI
PLL
EI
PL
9EI
5PL 2 DB D
2
−=⎟ ⎠
⎞⎜⎝
⎛ −=θ−
9EI
14PL2 DB D =θ
A B
E
C
D
θB/D t D/B
x
y
3EI
2PL u u
3 DB B
DB D ==
( ) ( ) D
DB
M/EI DB
DB
B
DB
B
DB
D D/B x Area Lv v t ⋅=−−= θ
( ) 2EI
PL
2
L
LEI
PL
L9EI
5PL
0 v
3 2 DB
D −=
⎟ ⎠
⎞
⎜⎝
⎛
⎟ ⎠
⎞
⎜⎝
⎛ −=
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛
⎟⎟ ⎠
⎞
⎜⎜⎝
⎛ −−
)(
18EI
19PL
18EI
19PLv
3 3 DB D =−=
3EI
2PL u v
3 DB D
ED D −=−=
18EI
19PL v u
3 DB D
ED D −==
9EI
14PL
2 DB D
ED D =θ=θ
Length Constraint Equation
1st Moment Area Equation ED M/EI
ED E
ED D D/E Area =θ−θ=θ
( )2EI
PLL
EI
PL
2
1
9EI
14PL 2 ED E
2
−=⎟ ⎠
⎞⎜⎝
⎛ −=θ−
18EI
37PL2 ED E =θ
A B
E
C
D
θD/E
t E/D
x
y
18EI
19PL
18EI
19PL u u
3 3 ED D
ED E =−==
2 nd Moment Area Equation ( ) ( ) E
ED M/EI ED
ED D
ED D
ED E E/D x Area Lv v t ⋅=−−= θ
( )
3EI
PL
3
2LL
2EI
PL L
9EI
14PL
3EI
2PLv
3
2 3 ED E
−=
⎟ ⎠
⎞⎜⎝
⎛ ⎟ ⎠
⎞⎜⎝
⎛ −=⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −−− )(
9EI
23PL
9EI
23PLv
3 3 DB D =−=
DB B θ DB
D θ
ED D θ
ED E θ

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 9/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-17
Example 2 Given a statically determinate beam subjected to external loads as shown in thefigure. The Young’s modulus E is constant and the moment of inertia of the cross section isdenoted by 2I for a segment AB and by I for segments BC and CD . Determine the relativerotation at the hinge and the displacements at the end point D .
Solution
Local coordinate systems for all segments are the same as the global coordinate system
Compute support reactions from static equilibrium equations (i.e. ΣF X = ΣF Y = ΣM = 0 )
Obtain BMD and M/EI diagram based on the local coordinate systems
2L
AX
B
Y
2L L
C D
2q
R AX =0
R AY =3qL/2 R CY =3qL/2
qL
AX
B
Y
C D
2q qL
M A=3qL2
-qL2 /2EI
R AX =0
R AY =3qL/2 R CY =3qL/2
AX
B
Y
C D
2q qL
M A=3qL2
X
-2qL2 /EI
-qL2 /EI
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-18
Sketch Qualitative Elastic Curve
Start at segment AB displacement and rotation at point A are already known
A
B C D
Length Constraint Equation
1st Moment Area Equation
( ) ( ) B AB M/EI AB
AB A
AB A
AB B B/A x Area Lv v t ⋅=+−= θ ( )( ) ( )
( ) ⎟ ⎠
⎞⎜⎝
⎛ ⎟⎟ ⎞
⎜⎜⎝
⎛ +
⎟
⎠
⎞⎜
⎝
⎛ ⎟⎟
⎠
⎞⎜⎜
⎝
⎛ −=+−
3
4L2L
2EI
qL
2
1
2
3L2L
EI
2qL
3
1 2L0 0 v
2
2 AB B )(
3EI
4qL
3EI
4qL v
4 4 AB B =−=
2 nd Moment Area Equation
AB M/EI AB AAB B B/A Area =θ−θ=θ
( ) ( )2L2EI
qL
2
12L
EI
2qL
3
1 0
2 2 AB B ⎟⎟
⎠
⎞⎜⎜⎝
⎛ +⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=−θ
6EI
5qL
6EI
5qL 3 3 AB B =−=θ
A B C D
θB/A
t B/A AB B θ
x
y 0 u u AB
AAB B ==
0 v AB A =
0 u AB A =
0 AB A =θ

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 10/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-19
Move to segment BC 3 quantities at both ends of segment BC are already known
Length Constraint Equation
2 nd Moment Area Equation ( ) ( ) C
BC M/EI BC
BC B
BC B
BC C C/B x Area Lv v t ⋅=+−= θ
( ) ⎟ ⎠
⎞⎜⎝
⎛ ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −=⎟⎟
⎠
⎞⎜⎜⎝
⎛ θ+−−
3
2L2L
EI
qL
2
1 2L
3EI
4qL0
2 BC B
4
)(
2 nd Moment Area Equation BC M/EI
BC B
BC C C/B Area =θ−θ=θ ( )2L
EI
qL
2
1
EI
qL 2 3 BC C ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=−θ
0 BC C =θ
A B
C
D
θC/B t C/B
BC B θ
x
y 0 u u BC
B BC C ==
3EI
4qL v v
4 AB B
BC B −==
0 u u AB B
BC B ==
0 v BC C =
EI
qL3 BC B =θ
Relative rotation at hinge
AB
B
BC
B B
θ−θ=θ∆
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛ −−=θ∆
6EI
5qL
EI
qL 3 3
B
6EI
11qL3
B =θ∆
BC C θ
AB B θ
B θ∆
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-20
Move to segment CD displacement and rotation at point A are already known
Length Constraint Equation
2 nd Moment Area Equation ( ) ( ) D
CD M/EI CD
CD C
CD C
CD D D/C x Area Lv v t ⋅=+−= θ
( ) ( ) ⎟ ⎠
⎞⎜⎝
⎛ ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −=+−
3
2LL
EI
qL
2
1 L0 0 v
2 CD D )(
2 nd Moment Area Equation CD M/EI
CD C
CD D D/C Area =θ−θ=θ ( )L
EI
qL
2
1 0
2 CD D ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −=−θ
A B
C
D θD/C = CD
D θ
t D/C x
y
0 u u CD
C
CD
D ==
0 v CD
C =
0 u u BC C
CD C ==
0 BC C
CD C =θ=θ
3EI
qL
3EI
qLv
4 4 CD D =−=
2EI
qL
2EI
qL
3 3 CD D =−=θ
2101 310 St t l A l i I M th d f M t A E ti
2101 310 St t l A l i I M th d f M t A E ti

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 11/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-21
Example 3 Given a statically determinate frame subjected to external loads as shown in thefigure. The Young’s modulus and moment of inertia of the cross section are constant anddenoted by E and I , respectively. Determine the displacements and rotations A, B, C , and D .
Solution
Define local coordinate systems for the segments ABC, BD and DE
Compute support reactions from static equilibrium equations (i.e. ΣF X = ΣF Y = ΣM = 0 )
R AX =-P
R AY =-2P
R DY =2P
L 2L
2L
P 2PL
A X
B
Y
C
D
A
B
C
D x
x y
y
P 2PL
AX
B
Y
C
D
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-22
Obtain BMD and M/EI diagram based on the local coordinate systems
Sketch Qualitative Elastic Curve
Two components of displacement at point A and the transverse component of displacement at point D are prescribed equal to zero while the displacement and rotation at point B and C are still unknowns. Thus, the segments BC and BD contain too many unknowns to be solved by the moment area and length constraint equations.
By applying Remark1 to the segment AB , we obtain
4PL/EI
A
B C D
2PL/EI
2PL/EI
A
B C D
Length Constraint Equation
0 u u AB
A
AB
B ==
2101 310 Structural Analysis I Method of Moment Area Equations
2101 310 Structural Analysis I Method of Moment Area Equations

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 12/13
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-23
Move to segment BD The transverse components of displacement at both ends of this segment are already known. By using Remark3, we obtain
Return to segment AB Now, four kinematical quantities of the segment BD are already known.
1st Moment Area Equation
( ) ( ) B BD M/EI BD
BD D
BD D
BD B B/D x Area Lv v t ⋅=−−= θ
( ) ( )3EI
8PL
3
2L2L
EI
4PL
2
1 2L0 0
3 BD D =⎟
⎠
⎞⎜⎝
⎛ ⎟ ⎠
⎞⎜⎝
⎛ =θ−− )(
2 nd Moment Area Equation
BD M/EI
BD B
BD D D/B Area =θ−θ=θ ( )
EI
4PL2L
EI
4PL
2
1
3EI
4PL 2 BD B
2
=⎟ ⎠
⎞⎜⎝
⎛ =θ−
3EI
8PL
3EI
8PL 2 2 BD B =−=θ
A
B
C
D
θD/B
t B/D
x
y
0 v BD
D =
0 v BD B =
BD B θ BD
D θ
3EI
4PL
2 BD D =θ
0 v AB A =
0 u AB
A =
0 u AB
B =
3EI
8PL
2 BD B
AB B −=θ=θ
2101-310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-24
Return to segment BD The longitudinal component of the displacement at point B of the segment BD is already known; thus, the longitudinal component of the displacement at point D can be readily computed from the length constraint equation.
1st Moment Area Equation
( ) ( ) B AB M/EI AB
AB A
AB A
AB B B/A x Area Lv v t ⋅=+−= θ ( )
3EI
4PL
3
2L2L
EI
2PL
2
1 2L
3EI
14PL0 v
3
2 AB B
=
⎟ ⎠
⎞⎜⎝
⎛ ⎟ ⎠
⎞⎜⎝
⎛ =⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −+− )(
2 nd Moment Area Equation
AB M/EI
AB A
AB B B/A Area =θ−θ=θ
( )EI
2PL2L
EI
2PL
2
1
3EI
8PL 2 AB A
2
=⎟ ⎠
⎞⎜⎝
⎛ =θ−−
3EI
14PL
3EI
14PL 2 2 AB A =−=θ A
B
C
D
θB/A
t B/A
x
y
AB Aθ
AB B θ
EI
8PL
EI
8PL v
3 3 AB B =−=
Length Constraint Equation
EI
8PLv u u
3 AB B
BD B
BD D =−==
2101-310 Structural Analysis I Method of Moment Area Equations

8/9/2019 3 Moment Area
http://slidepdf.com/reader/full/3-moment-area 13/13
2101 310 Structural Analysis I Method of Moment Area Equations Note provided by JRR Page-25
Finally move to segment CB The displacement and rotation at point C are already known
1st Moment Area Equation
( ) ( ) C CB M/EI CB
CB B
CB B
CB C C/B x Area Lv v t ⋅=−−= θ
( )
EI
PL
2
LL
EI
2PL L
3EI
8PL0 v
3
2 CB C
=
⎟ ⎠
⎞⎜⎝
⎛ ⎟ ⎠
⎞⎜⎝
⎛ =⎟
⎟ ⎠
⎞⎜⎜⎝
⎛ ⎟⎟ ⎠
⎞⎜⎜⎝
⎛ −−− )(
2 nd Moment Area Equation
CB M/EI
CB C
CB B B/C Area =θ−θ=θ ( )
EI
2PLL
EI
2PL
3EI
8PL 2 CB C
2
=⎟ ⎠
⎞⎜⎝
⎛ =θ−−
3EI
14PL
3EI
14PL 2 2 CB C =−=θ
A
B C D
θB/C
t C/B
x
y
0 v v BD B
CB B ==
EI
8PL
u u
3 BD
B
CB
B ==
CB B θ
CB C θ
3EI 11PL v
3
CB C =
3EI
8PL
2 BD
B
CB
B −=θ=θ
Length Constraint Equation
EI
8PL u u
3 CB B
CB C ==













![5 - Moment-Area Method[1]](https://img.dokumen.tips/doc/110x75/543fa1f2afaf9fd4148b4896/5-moment-area-method1.jpg)















