Embed Size (px)
Citation preview

1 はじめに
近年,老朽化したビルや橋梁,トンネルなどの保守点検にロボットを活用する試みが注目されている.また,これらのロボットは,災害発生時には,人命探査や情報収集を行うレスキューロボットとして活用されることが期待されている1-11).
これらのロボットには,様々な環境を移動可能な高い走破性が求められ,垂直な壁面の移動は,その重要な要件の一つである.
このような社会的要請を背景に,これまで様々なロボットが開発されてきた.現在,垂直な壁面を移動可能なロボットは,車輪型12-15)と脚型16-17)の2種類に分類することができる.車輪型ロボットは,通常,胴体に吸引機構をもち,胴体と壁との間を負圧にすることで壁に吸着し,車輪やクローラを使用して移動する機構を採用している.これにより,地上を走行するのと同じように壁面を走行することが可能となり,脚型ロボットに比べて移動が速く,かつ,操作も簡単であるといった特徴をもつ.しかし,表面に大きな凹凸や湾曲のあるような壁を移動することは困難であり,移動可能な壁面は,胴体との間に密閉空間を構成できるような壁に限れている.
一方,脚型ロボットは,各脚に吸盤を持ち,この吸盤により壁に吸着することで移動を行う.したがって,吸着可能な場所を選んで脚を接地することで,凹凸などの存在する壁面においても移動が可能である.しかし,多自由度を有することから,制御方法が複雑となり,自律化が困難となるといった問題点を持つ.
本研究で想定する点検作業や探索作業では,少数のオペレータにより,多数のロボットを同時に稼働させることが求められることから,ロボットには,ある程度の自律性が求められ,自律性と走破性の両立が実用化の鍵となる.
我々は,従来研究において,この自律性と走破性の両立を実現するため,生物が環境に適した振る舞いを生成する仕組みに着目し,この仕組みをロボットの制御に取り入れることで,複雑な実環境に対して受動的に適応可能な多脚ロボットの開発を行ってきた.また,実験により,能動関節を周期的に動かすという簡単な制御のみで,壁の凹凸や湾曲などに対して適応する振
る舞いが受動的に生成され,壁面を自律的に移動可能であることを確認した.しかし,従来のロボットは,先頭に取り付けられた脚を接地する場所が一意に定まってしまうため,吸着が不可能な場所を避けて移動することが不可能となる場合があるという問題を抱えており,脚機構の改善が望まれていた.
本研究では,従来の垂直壁を移動する多脚型ロボット18)を改良し,すべての脚に2つの能動回転関節と,並進をよび回転の2つの受動関節を有する機構を採用することで,接地場所の選択が可能な6脚ロボットを実現する.
2 従来のロボット
従来のロボットを Fig. 1 に示す.ロボットは,先頭に 1 脚と体幹に 4 脚を有する構造となっており,先頭の脚とそれ以外の脚とは構造が異なっている.先頭の脚は2つの吸盤を有し,根元のサーボモータによりFig.
2 のように回転運動を行うことで壁に吸着する.吸盤の根元は柔軟関節となっており,Fig. 3に示すように,θ < φの条件下では,吸盤が,壁の角度に沿う方向に受動的に回転するため,壁の角度を計測する必要がなく,未知の壁に対して用意に対応することができる.
他の4脚は,Fig. 4 のようなリンク機構となっており,脚を上下方向に動かすことで壁に吸盤を吸着させる.吸盤の根元は,先頭の脚と同様に柔軟関節となっており,受動的に壁の傾きに対応することができる.
また,Fig. 5 に示すように,すべての吸盤の先端は柔らかいスポンジとなっており,タイルの目地など,小さな凹凸があっても,密閉空間を構成し吸着することができる.
体幹には,柔軟性を有する蛇腹構造が採用されており,大きな凹凸に対しては,体感の柔軟性で対応することが可能である.
各吸盤は,Fig. 6 に示すように,電磁バルブ,エジェクタを介してコンプレッサーとつながれており,コンプレッサーの正圧をエジェクタで負圧に変換することで吸着を行う.電磁バルブの制御はコンピュータにより行われ,Fig. 7 に示すパターンにより開閉が行われる.
ロボットの歩行は,Fig. 7 および Fig. 8 に示すパターンを繰り返すことで行わる.
三次元環境を移動可能な吸盤6脚ロボット
―脚機構の改良による移動性能の向上―
○永山 和樹(法政大学) 齋藤 明日希(法政大学) 伊藤 一之(法政大学)
大道 武生(名城大学) 芦澤 怜史(名城大学) 松野 文俊(京都大学)
Six-legged climbing robot with suckers for 3-dimensional environments
-Improvement of mobility by using new leg mechanism-
* K. Nagayama (Hosei University), A. Saito (Hosei University), K. Ito (Hosei University),
T. Oomichi (Meijo University), S. Ashizawa (Maijo University), F. Matsuno (Kyoto University)
Abstract- Maintenance and inspection of old buildings, bridges, tunnels, and so on are important tasks of robots. In our previous work, for such tasks, we developed a multi-legged robot that climbs an unknown verti-cal wall by using suckers. In this report, we improve the mechanism of the leg and develop a six-legged robot that has higher mobility than previous one. Index terms- climbing robots, legged robots, sucker
第 8 回横幹連合コンファレンス
2017.12.2-3 立命館大学 朱雀キャンパス
C-4-4

以上のように,従来ロボットは,身体の様々なレベルの柔軟性を用いることで,壁の凹凸や湾曲に対して受動的に適応するため,コンピュータは,一定の歩行パターンお繰り返すだけで容易に制御可能であるといった特徴を持つ.
しかし,その一方で,壁に亀裂や穴が存在した場合にそれを回避して歩行を継続するという戦略がとれないという問題があった.特に,先頭の脚は,能動関節が一つしかなく,吸盤を接地する場所を変更することができない.
本研究では,この問題の解決に取り組み,通常の歩行パターンでは歩行の継続が難しい状況において,吸盤を接地する場所を手動で一時的に変更し,歩行の継続が可能となるような機構の提案を目標とし,脚の改良を行う.
Fig. 1: Previous robot
Fig. 2: Movement of the front leg
Fig. 3: Passive joint of the sucker
Fig. 4: Mechanism of middle and rear leg
Fig. 5: Sucker
剛体リンク
前脚のサーボ前脚の吸盤
壁
柔軟関節
脚 v
11 [cm]
スポンジ
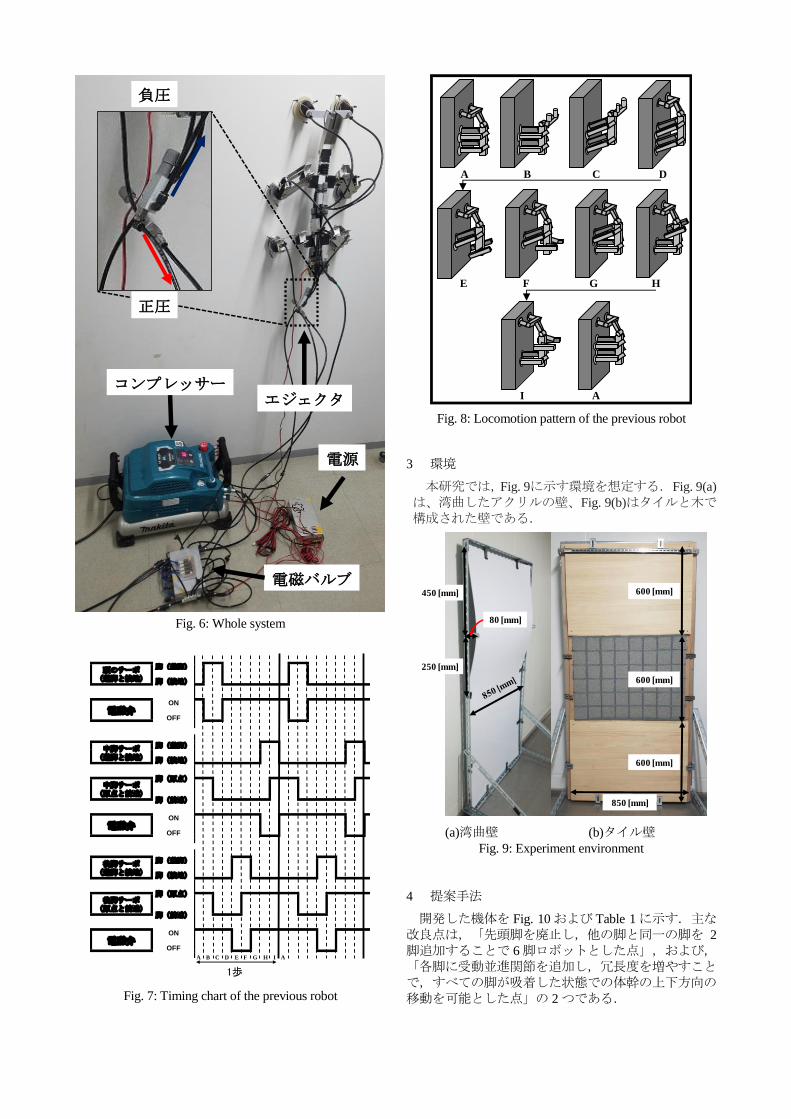
Fig. 6: Whole system
Fig. 7: Timing chart of the previous robot
Fig. 8: Locomotion pattern of the previous robot
3 環境
本研究では,Fig. 9に示す環境を想定する. Fig. 9(a)
は、湾曲したアクリルの壁、Fig. 9(b)はタイルと木で構成された壁である.
(a)湾曲壁 (b)タイル壁
Fig. 9: Experiment environment
4 提案手法
開発した機体を Fig. 10 および Table 1 に示す.主な改良点は,「先頭脚を廃止し,他の脚と同一の脚を 2
脚追加することで 6 脚ロボットとした点」,および,「各脚に受動並進関節を追加し,冗長度を増やすことで,すべての脚が吸着した状態での体幹の上下方向の移動を可能とした点」の 2 つである.
正圧
負圧
エジェクタコンプレッサー
電磁バルブ
電源
脚(遊脚)頭のサーボ(遊脚と接地) 脚(接地)
ON
電磁弁OFF
脚(遊脚)中脚サーボ(遊脚と接地) 脚(接地)
脚(原点)中脚サーボ(原点と前進)
脚(前進)
ON
電磁弁OFF
脚(遊脚)後脚サーボ(遊脚と接地) 脚(接地)
脚(原点)後脚サーボ(原点と前進)
脚(前進)
ON
電磁弁OFF
B D E F G H ICA A
1歩
A B C D
I A
E F G H
250 [mm]
450 [mm]
80 [mm]
600 [mm]
850 [mm]
600 [mm]
600 [mm]
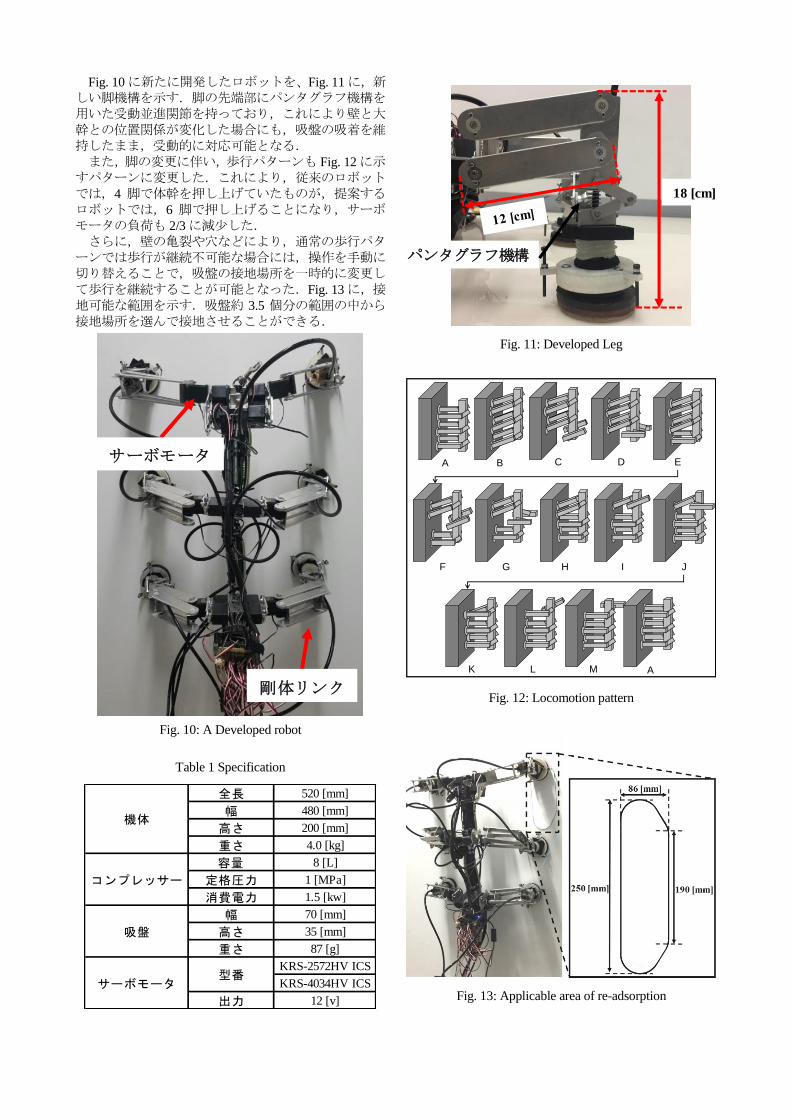
Fig. 10 に新たに開発したロボットを、Fig. 11 に,新しい脚機構を示す.脚の先端部にパンタグラフ機構を用いた受動並進関節を持っており,これにより壁と大幹との位置関係が変化した場合にも,吸盤の吸着を維持したまま,受動的に対応可能となる.
また,脚の変更に伴い,歩行パターンも Fig. 12 に示すパターンに変更した.これにより,従来のロボットでは,4 脚で体幹を押し上げていたものが,提案するロボットでは,6 脚で押し上げることになり,サーボモータの負荷も 2/3 に減少した.
さらに,壁の亀裂や穴などにより,通常の歩行パターンでは歩行が継続不可能な場合には,操作を手動に切り替えることで,吸盤の接地場所を一時的に変更して歩行を継続することが可能となった.Fig. 13 に,接地可能な範囲を示す.吸盤約 3.5 個分の範囲の中から接地場所を選んで接地させることができる.
Fig. 10: A Developed robot
Table 1 Specification
Fig. 11: Developed Leg
Fig. 12: Locomotion pattern
Fig. 13: Applicable area of re-adsorption
サーボモータ
剛体リンク
全長 520 [mm]
幅 480 [mm]
高さ 200 [mm]
重さ 4.0 [kg]
容量 8 [L]
定格圧力 1 [MPa]
消費電力 1.5 [kw]
幅 70 [mm]
高さ 35 [mm]
重さ 87 [g]
KRS-2572HV ICS
KRS-4034HV ICS
出力 12 [v]
機体
コンプレッサー
吸盤
型番サーボモータ
18 [cm]
パンタグラフ機構
MK AL
H JG IF
A EB DC
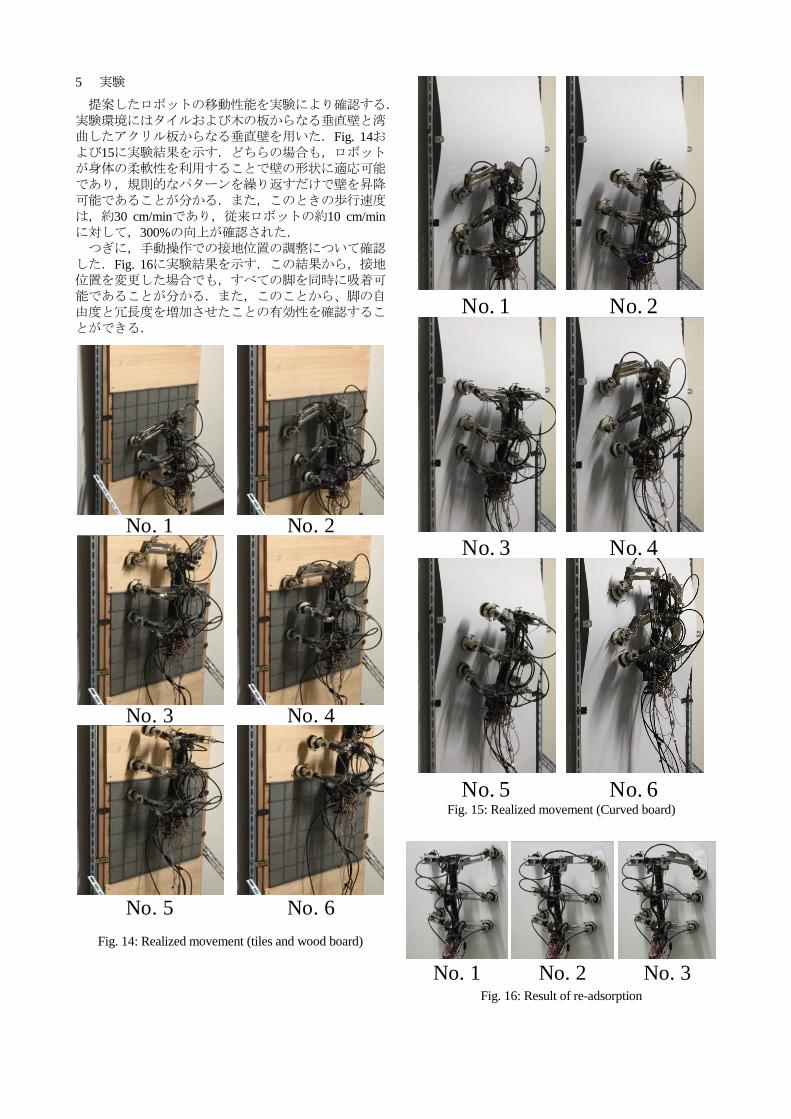
5 実験
提案したロボットの移動性能を実験により確認する.実験環境にはタイルおよび木の板からなる垂直壁と湾曲したアクリル板からなる垂直壁を用いた.Fig. 14および15に実験結果を示す.どちらの場合も,ロボットが身体の柔軟性を利用することで壁の形状に適応可能であり,規則的なパターンを繰り返すだけで壁を昇降可能であることが分かる.また,このときの歩行速度は,約30 cm/minであり,従来ロボットの約10 cm/min
に対して,300%の向上が確認された.
つぎに,手動操作での接地位置の調整について確認した.Fig. 16に実験結果を示す.この結果から,接地位置を変更した場合でも,すべての脚を同時に吸着可能であることが分かる.また,このことから、脚の自由度と冗長度を増加させたことの有効性を確認することができる.
Fig. 14: Realized movement (tiles and wood board)
Fig. 15: Realized movement (Curved board)
Fig. 16: Result of re-adsorption
No. 1 No. 2
No. 3
No. 6No. 5
No. 4
No. 1 No. 2
No. 3 No. 4
No. 5 No. 6
No. 3No. 1 No. 2

6 結言
本論文では,インフラ点検やレスキュー活動を想定した多脚型壁面移動ロボットについて考え,移動性能の向上を目標に従来ロボットの改良を行った.
その結果,脚の自由度,冗長度の増加による接地位置の調整,ならびに,負荷の分散による移動速度の向上を確認した.
今後は,脚の着きなおし動作の自動化を行い,オペレータによる介入を必要とすることなく,自律的に吸着可能な場所を選んで脚を接地し,歩行を継続できるよう,制御系を改良していく予定である.
謝辞
本研究の一部は,JSPS 科研費 15K00316 および15KK0015 の助成を受けたものである.また,本研究の一部は,総合科学技術・イノベーション会議により制度設計された革新的研究開発推進プログラム(ImPACT) により,科学技術振興機構を通して委託されたものである.
参考文献
1) F. Matsuno and Y. Uo, “Current trends in research and
development of rescue robot systems,” Journal of The
Institute of Electrical Engineers of Japan, vol. 129, no.
4, pp. 232–236, 2009.
2) S. M. Madanat, P. L. Durango, and V. M. Guillaumot,
“Inspection, prediction and decision-making in infra-
structure management: Framework, models and com-
putation,” Journal of Japan Society of Civil Engineers,
vol. 2003, no. 744, pp. 1–10, 2003.
3) R. R. Murphy, “International cooperation in deploying
robots for disasters: Lessons for the future from the
Great East Japan Earthquake,” Journal of the Robotics
Society of Japan, vol. 32, no. 2, pp. 104–109, 2014.
4) R. R. Murphy, “Navigational and mission usability in
rescue robots,” Journal of the Robotics Society of Ja-
pan, vol. 28, no. 2, pp. 142–146, 2010.
5) S. Tadokoro, “Technical challenge of rescue robotics,”
Journal of the Robotics Society of Japan, vol. 28, no.
2, p 134-137, 2010.
6) K. Ito and Y. Fukumori, “Autonomous control of a
snake-like robot utilizing passive mechanism,” Pro-
ceedings of the 2006 IEEE International Conference on
Robotics and Automation Orlando, Florida, May 2006.
7) Y. Sato and K. Ito, “Semi-autonomous modular robot
for maintenance and inspection,” Proc. of the 12th In-
ternational Conference on Autonomic and Autono-
mous Systems (ICAS2016), June 26-30, 2016-Lisbon,
Portugal, pp. 1–3.
8) H. Maruyama and K. Ito, “Semi-autonomous
snake-like robot for search and rescue,” Advanced
Robotics, vol. 30, issue 7, pp. 489–503, 2016.
9) Y. Kawai, K. Ito, and H. Aoki, “Passive stabilizing
mechanism for snake-like rescue robot,” Proc. of 13th
International Conference on Control, Automation, Ro-
botics and Vision (ICARCV 2014), December 10-12,
2014, Marina Bay Sands Singapore, pp. 1740–1745.
10) M. Masuda and K. Ito, “Semi-autonomous centi-
pede-like robot with flexible legs,” Proc. of IEEE In-
ternational Symposium on Safety, Security, and Rescue
Robotics 2014 (SSRR2014), October 27–30, 2014,
Hokkaido Japan.
11) K. Ito and Y. Ishigaki, “Semiautonomous centi-
pede-like robot for rubble—Development of an actual
scale robot for rescue operation,” Int. J. Advanced
Mechatronic Systems, vol. 6, no. 2/3, pp. 75–83, 2015.
12) D. Longo and G. Muscato, “The Alicia3 Climbing
Robot A Three-Module Robot for Automatic Wall In-
spection,” IEEE Robotics & Automation Magazine,
MARCH 2006, pp. 42-50
13) Y Katsuki, T Ikeda and M Yamamot, “Reliable Glass
Cleaning Motion of a Wall Climbing Robot Using a
Dirt Detect Sensor,” TRANSACTIONS OF THE JA-
PAN SOCIETY OF MECHANICAL ENGINEERS
Series C, Vol. 78, No. 786, 2012, pp.557-567
14) Q. Zhou and X. Li, “Design of Wall-climbing Robot
Using Electrically Activated Rotational-flow Adsorp-
tion Unit,” IEEE/RSJ International Conference on In-
telligent Robots and Systems IROS Daejeon Conven-
tion Center, Daejeon, Korea October 9-14, 2016,
pp.5758-5763
15) D. Zhang, D. Wang, “WALS-Robot: A Compact and
Transformable Wheel-Arm-Leg-Sucker Hybrid Robot,”
IEEE/RSJ International Conference on Intelligent Ro-
bots and Systems IROS Daejeon Convention Center,
Daejeon, Korea, October 9-14, 2016, pp.2584-2589 16) W. Zhi Heng, B. Guan Jun, Z. Li Bin “Development
and control of flexible pneumatic wall-climbing robot,”
supported by the National Natural Science Foundation
of China, 2009, pp.0961–0970
17) S. Panich, “Development of a Wall Climbing Robot”
Journal of Computer Science 6, 2010, pp.1185-11
18) A. Saito, K. Nagayama, K. Ito, T. Oomichi, S. Ashi-
zawa and F. Matsuno, “Semi-autonomous multi-legged
robot for 3-dimensional environments” 2016 JSME
Conference on Robotics and Mechatronics RO-
BOMECH 2016 in YOKOHAMA, June 9,2016, pp.51





























