Embed Size (px)
Citation preview
11
FOBOTFOBOTThe Hexapod Walking The Hexapod Walking
RobotRobot AuthorsAuthors::
Balázs AndrásBalázs AndrásPécskai BalázsPécskai BalázsSupola BalázsSupola BalázsVámossy ZoltánVámossy ZoltánMolnár AndrásMolnár András
Budapest Polytechnic, Budapest Polytechnic, John von Neumann Faculty of John von Neumann Faculty of
Informatics, Informatics, HungaryHungary
23 March 200423 March 2004

22
ContentsContents3.3. The main purposes of the robotThe main purposes of the robot4.4. Similar developmentSimilar development5.5. Common featuresCommon features6.6. Particular purposesParticular purposes7.7. Construction of the systemConstruction of the system8.8. Mechanical structureMechanical structure9.9. Electric structureElectric structure10.10. Movement of the legsMovement of the legs11.11. CommunicationCommunication12.12. PC side controlPC side control13.13. Planning of the walking Planning of the walking
strategiesstrategies14.14. Walking strategiesWalking strategies15.15. Global Positioning SystemGlobal Positioning System16.16. Global positioningGlobal positioning17.17. Eye-based navigationEye-based navigation18.18. Processing of the PAL-optic Processing of the PAL-optic
picturepicture19.19. Position determination step by Position determination step by
stepstep20.20. ResultResultss I I21.21. ResultResultss II II22.22. Further informationFurther information

33
The main purposes of the robotThe main purposes of the robot
The robot is able to:The robot is able to: Move quickly (apart from the quality of Move quickly (apart from the quality of
the terrain)the terrain) Have duplex communication channel Have duplex communication channel
with the controlling PCwith the controlling PC Have remote control optionHave remote control option Partially explore its environmentPartially explore its environment Avoid obstaclesAvoid obstacles Reach a designated target by self-Reach a designated target by self-
navigationnavigation

44
Similar developmentSimilar development
Autonomous hexapod robot Autonomous hexapod robot Only one actuator per leg Only one actuator per leg Speed: 2.25 m/sSpeed: 2.25 m/s 3700 m distance on one set 3700 m distance on one set
of batteriesof batteries Swims, and climbs stairsSwims, and climbs stairs Onboard control of the Onboard control of the
robot and wireless access robot and wireless access to the command interface is to the command interface is supported by RHexLibsupported by RHexLib
RhexRhex
Source: www.rhex.netSource: www.rhex.net

55
Common featuresCommon features
Has got six legsHas got six legs
Similar movementSimilar movement
StructureStructure
Six legs can be controlled Six legs can be controlled independently from each independently from each otherother
Curved legsCurved legs

66
Particular Particular purposespurposes
Development of the construction (number of the legs)Development of the construction (number of the legs)
Solution of the problem of the motor control:Solution of the problem of the motor control: Turn direction, speed, setting feet optionsTurn direction, speed, setting feet options
Programming of the central process unit:Programming of the central process unit: Duplex communication between CPU and PCDuplex communication between CPU and PC The execution of the various walking strategiesThe execution of the various walking strategies
Joining of the GPS module to CPU:Joining of the GPS module to CPU: Data pre-testing and pass it on to PCData pre-testing and pass it on to PC
Developing the PC-side software:Developing the PC-side software: User interfaceUser interface Communication module and test environment alternativesCommunication module and test environment alternatives Map manager moduleMap manager module Virtual environment building module*Virtual environment building module* Avoiding obstacles, route-planning and navigation module*Avoiding obstacles, route-planning and navigation module*
* optional modules

77
Construction of the Construction of the systemsystem
* optional modules
*
*
*
*

88
Mechanical structureMechanical structureDimensions:Dimensions:
Length:Length: 420 mm 420 mm Width:Width: 265 mm 265 mm HeightHeight
(standing): 175 mm(standing): 175 mm Leg height: 115 mmLeg height: 115 mm
Evolution of the legs:Evolution of the legs:
EarlyEarly
stage stage Plan-parallelPlan-parallel CurvedCurved
spiralspiralStraightStraight
AluminumAluminum skeletonskeleton

99
Electrical structureElectrical structure
Printed electric circuit:Printed electric circuit:
Interfaces on the robot: Interfaces on the robot:
2 pcs. serial port socket 2 pcs. serial port socket
(communication + GPS) (communication + GPS) Programmer interface for PICs Programmer interface for PICs Sockets for GPS and cameraSockets for GPS and camera Interfaces for optional sensor and Interfaces for optional sensor and
structurestructure
Main parts: Main parts:
6 pcs. DC motor (12 Watt)6 pcs. DC motor (12 Watt) 6 pcs. PIC 16F873 microcontroller6 pcs. PIC 16F873 microcontroller 6 pcs. L6203 motor controlling IC6 pcs. L6203 motor controlling IC

1010
Movement of the legsMovement of the legs
Leg movementLeg movement:: Determination of velocity and direction (automatic Determination of velocity and direction (automatic and/or by PC)and/or by PC)
+ setting to position + setting to position
Speed: Speed: PWM modulation is created by PICPWM modulation is created by PIC
Regulation:Regulation: Speed of the obtaining of the Speed of the obtaining of the desired desired position position is in is in direct proportion to direct proportion to square of square of distance distance
Speed’s derivative is similar to Speed’s derivative is similar to the the aforesaidaforesaid
Advantage: regulation time is Advantage: regulation time is short, short, increased burdenincreased burden is is easier solvedeasier solved

1111
CommunicationCommunication
FOBOT communicates on the serial port(RS232) with own FOBOT communicates on the serial port(RS232) with own protocol.protocol.
All PICs have different address. All PICs have different address. 1th. byte: address + instruction’s type1th. byte: address + instruction’s type
2nd. byte: desired position or velocity 2nd. byte: desired position or velocity
PICs send back two bytes:PICs send back two bytes: Actual speedActual speed
Actual positionActual position
Advantage of serial communication:Advantage of serial communication: Easy programmableEasy programmable Single transmissionSingle transmission Wireless communication is realizable by two Wireless communication is realizable by two
one-channel transceiver-receiver pairsone-channel transceiver-receiver pairs
1212
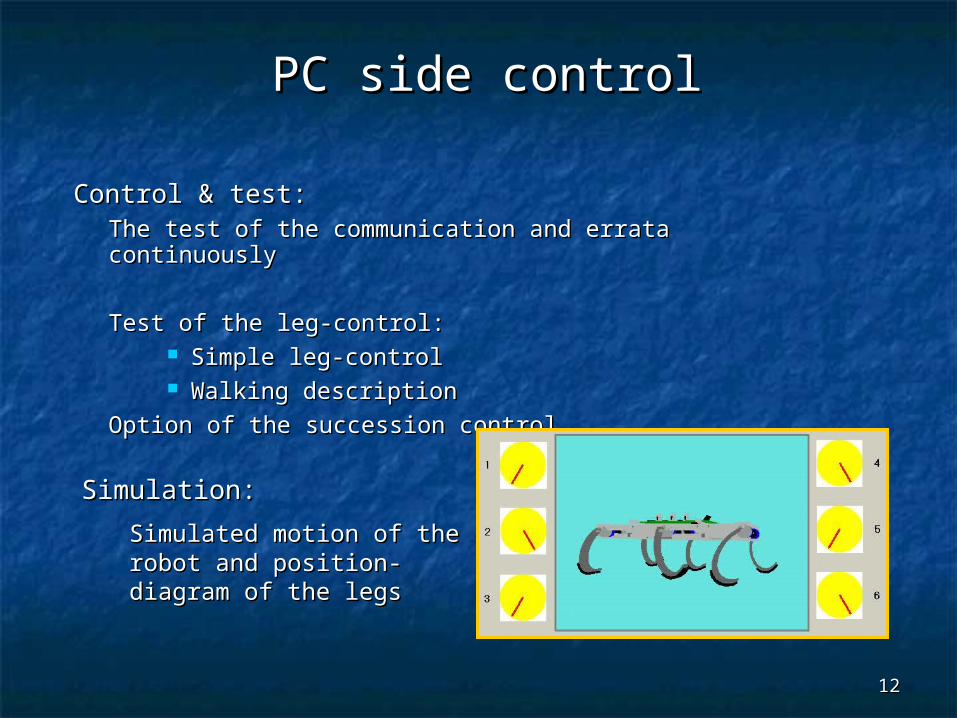
PC side controlPC side control
Control & test:Control & test:The test of the communication and errata The test of the communication and errata continuouslycontinuously
Test of the leg-control:Test of the leg-control: Simple leg-controlSimple leg-control Walking descriptionWalking description
Option of the succession controlOption of the succession control
Simulation: Simulation:
Simulated motion of theSimulated motion of the robot and position-diagram robot and position-diagram of the legsof the legs

1313
Planning of the walking strategiesPlanning of the walking strategiesPlan:Plan:
Position plottedPosition plotted
against timeagainst time
Items ofItems of
target pointstarget points
SpeedSpeed
Tripod walking:Tripod walking:

1414
WalkingWalking strategiesstrategies
Tripod:Tripod:
Quattro:Quattro:
Worm:Worm:(the (the slowest)slowest)
Turning:Turning:
the legs move just like at the legs move just like at the tripod strategy, but the the tripod strategy, but the two sides move in different two sides move in different directiondirection

1515
Global Positioning SystemGlobal Positioning System
Example:Example:$GPGGA,123519,4807.038,N,01131.324,E,1,08,0.9,545.4,M,46.9,M,,*42$GPGGA,123519,4807.038,N,01131.324,E,1,08,0.9,545.4,M,46.9,M,,*42
Measuring controlled by the software:Measuring controlled by the software: Minimum number of the used satellitesMinimum number of the used satellites Applied filters: average, median Applied filters: average, median Displaying the properties of the satellitesDisplaying the properties of the satellites
GPS signals:GPS signals: NMEA sentences (National Marina Electronics NMEA sentences (National Marina Electronics Association)Association)
- GPGGA, GPRMC, GPGSA, GPGSVGPGGA, GPRMC, GPGSA, GPGSV
Degree of latitudeDegree of latitude
Degree of longitudeDegree of longitude
HHeight above sea-eight above sea-level.level.

1616
Global positioningGlobal positioningPlanning route:Planning route:
Placing sub-targetsPlacing sub-targets
Route following:Route following: Filtering input signalsFiltering input signals
Actual position on the mapActual position on the map
Calculating of the direction of the Calculating of the direction of the sub-sub- targetstargets
Properties of the satellites: Properties of the satellites: Positions Positions
Range of the input signalsRange of the input signals

1717
Eye-based navigationEye-based navigation
Step of the real-time image Step of the real-time image processing:processing:
Digitalization (Video for Windows)Digitalization (Video for Windows) Modified input image by filters:Modified input image by filters:
DilatationDilatation ErosionErosion Edge detection Edge detection SUSAN algorithmSUSAN algorithm SkeletonSkeleton BinarizationBinarization
Position and orientation Position and orientation
determination based on edge determination based on edge detection detection

1818
Processing of the PAL-optic pictureProcessing of the PAL-optic picture
PAL = Panoramic Annular Lens (invented by Prof. Pal PAL = Panoramic Annular Lens (invented by Prof. Pal Greguss)Greguss)
Real-time mapping and effect of Real-time mapping and effect of filters:filters:
Centric-minded Centric-minded imagingimaging

1919
Position determination step by Position determination step by stepstep
Determination of Determination of the vertical the vertical position of position of the FOBOT the FOBOT
Layout Layout of the of the
PAL-imagePAL-image
Determination of Determination of the spatial vectors the spatial vectors from the PAL-imagefrom the PAL-image
EdgeEdgedetectiondetection
Selection of the Selection of the followed points manuallyfollowed points manually
Add Add filtersfilters
3D transformation,3D transformation, mapping the points mapping the points
Here is FOBOT
Schoolyard
PAL-image

2020
Results I.Results I.
Movement:Movement: Speed: 5,8 meters / minSpeed: 5,8 meters / min
Turning around: 36 secTurning around: 36 sec
Simple walking development Simple walking development possibilitypossibility
Several walking strategies are Several walking strategies are developeddeveloped
In progress:In progress: Eye-based Eye-based navigationnavigation
Obstacles Obstacles avoidanceavoidance
Wireless Wireless communication communication and local power-supplyand local power-supply

2121
Results II.Results II.Tested GPS receiver:Tested GPS receiver: GNV12 (Lowrance), Summit GNV12 (Lowrance), Summit (Garmin),(Garmin), PS1 (µblocks), Navistar (BAE PS1 (µblocks), Navistar (BAE Systems),Systems), Jupiter (Connexant) Jupiter (Connexant)
Test of the navigation on road and the court of the college Test of the navigation on road and the court of the college (football pitch)(football pitch)
Football pitch

2222
project homepage:project homepage:
Further informationFurther information
fobot.bmfnik.orgfobot.bmfnik.org





























