Embed Size (px)
Citation preview

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 1/21
K O N I N I C L . N E D E R L . A K A D E M I E V A N W E T E N S C H A P P E N — A M S T E R D A M
R e p r i n t e d f r o m Pr oceed ings, Ser ies B, 70, N o. 1, 1967
M E C H A N I C S
A S T R I P T H E O R Y FO R R O L L I N G W I T H S L I P A N D SPIN. I '
B Y
J. J. K A L K E R i )
(Communicated b y Prof. W . T . K O I T B B at t he me et in g of June 2 5, 1966)
SUMMARY
I n recent years, several authors [ 3 ] , [ 4 ] have proposed a strip theory
t o deal w i t h t he tra nsmission of force during the r o l l i n g of two elastic
bodies. These theories have been hampered by the f act tha t only slip
i n the direction of r o l l i n g could be considered. This was due to the circum
stance that the basic C A R T E R - P O R I T S K Y theory [ 1 ] does not take lateral
slip, or spin into account. The present paper supplies an app roxi mat ive
theory to remove this restriction.
This theory is v a l i d f or all values of the creepage, bu t only f or a l i m i t e d
range of the spi n parame ter. I t is tested b y the case of pure creepage,
an d by the case of pure spin.
I n the case of pur e creepage, i t is found that the total tangential force
is close to the ta nge nti al force obta ined f r o m other sources [ 6 ] , when
the contact ellipse is narrow in the direction of r o l l i n g . I n the case of a
circular contact area, the agreement is much worse: rela tive errors of
up to 25 % occur, while i t also appears that the influence of Poisson's
ratio is incorrectly accounted for by the strip theory. The adhesion area,
however, is i n excellent agreement w i t h the experiments [ 3 ] .
I n the case of pure spin the total force has a rela tive error w i t h respect
t o the results of K A L K E R ' S numerical theory [ 6 ] of at most 2 0 % when
the axial ratio of the contact ellipse is 0.2 (minor axis in r o l l i n g direction),
while in the case of a circula r contact area the error is up to 4 0 %. I n both
cases considered, Poisson's ratio is 0 . 2 8 . I t also appears f r o m a comparison
w i t h theories of infinitesimal spin tha t even for slender ellipses the
dependence on Poisson's ra ti o is more complex tha n tha t envisaged by
the strip theory. Judging f r o m the exp eri men tal evidence of P O O N [ 1 0 ]
( 1 case), i t would appear that the adhesion area is exce llen tly pred ictedb y the strip theo ry i n the case of a circular contact area.
1 ) L ab o r a to r ium v o o r Technische Mechanica, T . H . D e l f t , Mekelweg 2. Report
n r . 327.

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 2/21
1 1
T A B L E OF CONTENTS
Page
Summary 10
List of Symbols 11
1 . Introduction 13
2 . The Theory of Hertz 14
3. Boundary Conditions of Rolling 16
4. Solution of the Elasticity Problem under Three Simplifying Assumptions 17
4 . 1 . T h e Connect ion between Surface T r a c t i o n a n d D i sp la c e me nt in a
Ha lf spa c e . T h e Cross-Dependence o f N o r m a l a n d Tangen t ia l Tract i ons 18
4.2. The S t r i p t he ory A s s u m p t i o n 2 1
4.3. The Carter A s s u m p t i o n 2 3
5. The Solution of the Problem in Strips with an Adhesion Area 25
5 . 1 . T h e Basic S o l u t i o n i n S t r ips w i t h a n Adhesion Ar ea 25
5 .2. The Fr ic t i on La w in the Are a o f S l ip 29
5 .3. The Fr i c t io n L a w in the Are a o f Adhesion 32
5 .4. The So lu t ion u n d e r a Res t r ic t ion 34
6. The Solution in Strips without Adhesion Area 37
7. The Total Force Exerted on the Lower Body 41
7 . 1 . T h e P r i m i t i v e s o f Fx a n d F
y 41
7.2, The In t e r se c t i on o f the S e pa ra t r i x w i t h t he L e a d i ng Ed ge of t he
Cont a c t Ar ea 43
8. Two Special Oases 44
8 . 1 . T h e Case o f Creepage w i t h o u t S p i n (y = 0) 44
8 .1 1 . T h e D i v i s i o n o f t h e Cont a c t Ar ea 45
8 .1 2. T h e T r a c t i o n D i s t r i b u t i o n 4 6
8.13. Th e Sli p 47
8.14. The Angle between S l ip and Tr ac t io n 47
8 .15 . The T ot a l Force T r a n s m i t t e d b y t h e U p p e r Bo dy to the Lo we r 49
8.2. The Case o f P u r e Spi n 52
8 .21 . The Di v i s i on of the Cont a c t Ar ea 56
8 .2 2. T h e T r a c t i o n D i s t r i b u t i o n 5 7
8.23. Th e Sli p 57
8.24. The Angle between S l ip and Tra c t i on 58
8 .25 . The T ot a l Force T r a n s m i t t e d b y t h e U p p e r Bo dy to the Lo we r 59
8.26. The Case | y | > 1 6 0
9. Conclusion 61
References 62
L I S T OF S YMBOLS
B o l d face symbols designate vectors.
A supe rsc r i p t + indicates tha t t h e q u a n t i t y belongs t o the low er body.
A superscr ipt — indicates that t h e q u a n t i t y belongs t o the up p er body.
Reference
S y ^ 0 1 M e a m n g
equat ion
A dimensionless constant connected w i t h
n o r m a l pressure.
(2.7)
Semiaxis o f contact ellipse i n r o l l i n g (x)
di rec t ion . (2 .1 )
Semiaxis o f contact ellipse i n la t e ra l (y)
direct ion (2.1)

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 3/21
12
Symbol MeaningReference
equat ion
c
E
E'E
Fa
Fx,Fy
67, G+, 67¬
9
h
h'
k
I
M
N
P{x, y)
Rx> B
v<B
x 'R
v
s
u+, v+, u>+,
u~, v~, u>-
u(x, y), v(x, y), w(x, y)
V
V+, v-
w
(WX, Wy)
X , Y
X ' , Y'
X , Y
x, y, z
H a l f w i d t h of contact in terva l .
Contact area, — in terva l .
Contact area in st r ip approxi mat i on.
Complete ell iptic int egr al of the second
k i n d (no vector).
Slip area, — in terva l .
L o ck ed area, — in terva l .
E x c e n t r i c i t y of cont act elli pse.
U n i t vectors.
T o t a l tan gent ial force per u n i t l ength in
indirect ion.
M o dul us of r i g i d i t y : combined, lower body,
upper body.
R a t i o o f the axes of the co nta ct ellipse,
H a l f w i d t h of adhesion in terva l .
Dist ance of center of Eh to leading edge
o f E.
Distance of t r a i l i n g edge of E to separatrix.
M a j o r semiaxis of cont act e llipse.
A large length.
N o r m a l force.
Dis s ipa t io n pe r u n i t t ime per u n i t area.
Coordinate yjb of bou nda ry between stri ps
w i t h Eh and st r ips w i t h o u t Eh.
R a d i i of curva tur e of lower an d upper bod y.
M i n o r semiaxi s of cont act ell ipse.
R e l a t i v e sl ip (of upper bod y over lower).
T o t a l tangential force.
(x, y, z) compone nts of elastic disp lace ment.
Displacement differences.
Rolling velocity.
V el o c i t y o f a par tic le of the bodies.
R i g i d v e l o c i t y of the bodies.
A f o r m i n v o l v i n g creepage an d spin p ara
meters a n d y.
U n i t vector i n the di rect ion of the slip.
(x, y) components of tangen t ia l t ract ion
ac t ing on lower body.
The par t of tangent ia l t ract ion act ing on
whole E.
The par t of tangent ia l t ract ion act ing on Eh.
Cartesian coordinate system.
(4.8)
(2.1)
(4.9)
(2.7),
Table 1
Sec. 3.
Al so : (5.42)
Sec. 3.
Al so : (5.42)
(2.2)
(8.16b)
(8.21b)
(5.7)
(2.6)
(2-2),
Table 1
Sec. 5 1,
E i g . 1, (5.40)
Sec. 5.1
F i g . 1, (5.40)
(5.41)
Sec. 2
(4.9)
(2.7)
(6.10),
(6.11) , (6.16)
(7.10),
(7.12) , (7.14)
Sec. 2
Sec. 2
(3.3), (3.4),
(5.2a)
Sec. 3
(4.2)
(3.1)
(3.2), (3.3)
(3.1), (3.2)
(5.19a)
(3.5)
(5.4)
(5.5)
Sec. 2

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 4/21
1 3
Symbol M eaningReference
equation
x' ^-coordinate measured f r o m center o f En- (5.5)
Z N o r m a l pressure acting on the lower body. (2.7)
Dimensionless constants connected w i t h
X', Y'. (5.4)
<*', p Dimensionless constants connected w i t h
X , Y . (5.5)
Ö Angl e between slip an d tan gent ial tr act ion. (5.24), (5.26)
e Angle between slip an d a;-axis; also, in
8.26, a small posit ive q ua nt it y. (8.14)
•Q Angle between tangenti al t ract i on and
a-axis. (8.14)
V L a t e r a l creepage p arameter . (5.13)
n = (l-a)n
e Angle of ap ex of adhesion area i n p ure spin. (8.33)
A combined elas t ici ty constant. (4.3), Ta bl e 2
h(x') A posi t ive fu nct ion . (5.19b)
h{x) A posi t ive fun cti on. (5.20)
ft Coefficient of f r i c t i o n ( take n consta nt). (3.5)
1 L o n g i t u d i n a l creepage p arameter . (5.13)
1 E ffec t iv e l o ng i tud ina l creepage p arameter1i n a str ip. (5.13)
Q Characteristi c le ngt h of the bodies. (2.3)
•y, cr+, o~ Poisson's rati o. Combin ed, lower body,
up p er body. (2.6)
X Angle of Her tz . (2.5), Ta bl e 1
I n 8 . 1 : p a r a m e t e r t o describe total force. (8.2)
Vx L o n g i t u d i n a l creepage. (3.2)
Vx E ffec t iv e l o n g i t u d i n a l creepage in a str ip . (5.1)
Vy L a t e r a l creepage. (3.2)
<P Spin. (3-2)
X
A p a r a m e t e r connected w i t h p ure spin. (8.43)
V S pin p arameter . (5.13)
1 . I N T R O D U C T I O N
Consider two bodies of revolution which are pressed together w i t h a
force N , and whi ch r o l l over each other. Owing to the normal force N,
a contact area E is form ed in which the bodies touch. I f the conformi ty
o f the bodies is not too strong, and changes of curvature are small, the
contact area and the normal pressure t ransmit ted across i t are given by
the Hertz theory, according to which E is an ellipse, and the norm al
pressure distribution is half ellipsoidal. The results of the H ert z theory
are given in Section 2. I n additi on to the norma l pressure, a tangential
force can be t ransmit ted from one body to the other, owing to friction.
Wh en the velocities of the bodies at the contact area are almost equal,
slip w i l l occur in part of the contact area, called the area of slip Eg, while
i n the other part, the locked area Eh, there is no velocity of one body
w i t h respect to the other. This is a consequence of the fact that the elastic
8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 5/21
1 4
deformation modifies the local velocity pattern near the contact area.
I n the area of slip, work is done by the f r i c t i o n forces; macroscopically
this results i n a difference of the overall circumfer ent ial velocities of
the bodies. Thi s differ ence is described by the concepts creepage and spin.
A rigorous definition of these concepts w i l l be found i n Section 3 .
The f i r s t study of r o l l i n g w i t h creepage was made by CA RT ES , [ 1 ] , i n
1 9 2 6 . He considered the case th at the contact area is a str ip (as it is
i n two cylinders w i t h parallel axes), and that the bodies r o l l over each
other w i t h creepage in the direction of r o l l i n g . I n recent years, Carter's
results have been applied by H A I N E S an d OL LE R T ON [ 3 ] , an d also by
J O HN SO N [ 4 ] , to calculate the more general case of an elliptical area of
contact. The process, which is due to Haines, is as follows. The contact
area is split up in very narrow strips w i t h the long side par all el to the
direction of r o l l i n g . For each strip, the stress distribution is calculated
according to Carter; these stress distr ibut ions, pu t beside each other,
give a n app roxima tion of the t rue stress distribution. T his appr oximat ion
is good for slender contact ellipses w i t h the narrow side in the direction
of r o l l i n g , while for non-slender ellipses i t gives a good qual it at ive insighti n the real stress distribution.
This process was applied by H A I N E S and O L LE R TO N [ 3 ] to creepage i n
the direction of r o l l i n g , in an elliptic contact area. Then, Carter's theory
can be used without modification. Carter's tre atm ent of the elastic problem,
however, is restricted to displacements in the r o l l i n g direction only,
an d hence cannot be used when there is lateral creepage or spin. I t is the
object of the present paper, to give a trea tme nt of the elastic proble m
without this defect. As a consequence, we are able to give strip solutions
applicable to longitudinal creepage, lateral creepage, and spin. I n our
considerations of ela sticity, the bodies are app roximated by halfspaces.
2 . T H E T H E O R Y OE HE R T Z
When the bodies are pressed together, a contact area E is form ed
between them. This contact area, and the normal pressure Z carried by
i t are the object of study i n the t heory of He rt z (see, for instance, L O V E [ 8 ]
p . 1 9 2 sqq).
I n thi s theory, the bovmdary conditions are set up for Moti onless,
counterformal f i n i t e bodies. Then, in order to s i m p l i f y the solution as
much as possible, the geome try of the bodies is simplified by approxi matin g
the bodies by elastic halfspaces, which in a cartesian system (x, y, z) are
given by z > 0 and z < 0 . The boundary conditions are retained w i t h only
slight modification, the most important of which is, th at t he elastic
displacement u and the stresses become unnoticeable far f r o m the contact
area.
I t is the n found that the contact area is elliptic i n f o r m . We adopt
a coordinate system (x, y, z) i n which the o r i g i n lies i n the centre of the

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 6/21
15
contact area, and in which the axes of the ellipse are the axes of x an d y.
The axis of z coincides w i t h the inner nor ma l of the lower body (halfspace
2> 0) at the centre of the contact ellipse. So, the contact area E is given by
(2.1) E={x, y, z: 2=0, (a;/a)2 + ( y / 6 ) 2 < l } .
The ratio of the axes of the ellipse is complete ly deter mined by thegeometry of the mid efor med bodies, a an d b are the semiaxes i n x and y
direction; apart f r o m that we write I fo r the ma jo r semiaxis of the ellipse,
an d s for the min or semiaxis; fur ther , we set
(2.2) g-sjl, e = ]/l-g*.
We assume that the planes of principal curvature almost coincide. This is
the case when two bodies of revolution r o l l steadily over each other:
indeed, the parallel circles of the bodies lie then almost in parallel planes.
Under this assumption, the principal directions of the ellipse lie almost
i n the planes of principal curvat ure. I t should be note d that the assumption
is n ot necessary fo r the v a l i d i t y of the He rt z theory (see L O V E [ 8 ] , p. 194),bu t the analysis is somewhat simpler th an i n the general case. We write
R£, Rf for the principal radii of cmvat ur e of the lower body which
correspond to the plane y = 0, x = 0 respectively. We take R+, R+ positive
when the corresponding centre of curvat ure lies i n the lower halfspace
z>0. I n the same manner, R~ an d R~ are denned as the principal radii
o f cu rvatu re of the upper body; they are take n positive, when the corres
ponding centre o f curvatu re lies i n the halfspace z <0. We define the
characteristic length q of the bodies as follows:
(2.3) l /e = | ( W + W + W + l / i 2 v - ) .
I n the case of a sphere on a plane, q in the diameter of the sphere. Now,we have:
( I f (1/R+ + 1/R-)>(1IR+ + 1/R-), then l = b>a=s,
(2.4) I( I f {1IR+ + IIR-)<{1IR+ + 1IR-), then s = & < a = Z.
The ra tio of the axes g is tabulate d by He rtz w i t h the aid of Hertz's angle T ,
which is defined as
(2.5) cos r = fc[(l/i?+ + l / ^ - ) - ( l / i ? + + l / i 2 - ) | .
He rtz 's table is reproduced i n table 1.
The pressure distribution, and the length of the semiaxes depend onthe elastic constants of both bodies, combin ed i n special manner . L et G+,
G- be the modulus of r i g i d i t y of lower, upper body, and let a+, a be
Poisson's ra ti o of lower, upper body. Then the resul ts can be described
i n terms of a combined modulus of r i g i d i t y G and a combined Poisson

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 7/21

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 8/21
17
unstressed state so th at t he elastic deformat ion dies out fa r f r o m the
contact area. We denote by V+, V ~ the real velocity of lower, upper body.
The relative slip is defined as the velocity of the upper body with respect
to the loiuer, divided by the rolling velocity:
( 3 . 3 ) s(sx,sy) = (l/V)(V--V+).
According to K A L K E R [ 6 ] , Sec. 2, the re lat ive slip is, under condi tions
o f steady r o l l i n g ,
.. b(u+ — u~) b(v+—v~)( 3 . 4 ) S x = vx-cpy + -
5
—^ - %=-%+p g; + - v
" —
where (u+, v+) are the (x, ^-compone nts of the elastic disjDlacement of the
surface of the lower body, while [vr, v~) are the corresponding quantities
of the upper body. D enoti ng the slip area by Eg, the locked area by En,
the tange ntia l tr act ion exerted on the lower body by ( X , Y), the boundary
conditions are, according to K A L K E R [ 6 ] , Sec. 2 :
(X , Y) = (ivx, wy) ixZ,
/u : coefficient of f r i c t i o n , ta ken constant, \ i n Eg,
( 3 . 5 )x = SxjS Wy = SyJS S = I SX, Sy) | = + S^
s x = sy = 0, \{X, Y)\<pZ in Eh
X=Y=0 on 2 = 0, outside E,
stresses and displacements vanish at i n f i n i t y .
4 . S O L U T I O N OE TH E E L A S T I C I T Y P R O B L E M U NDE R T HR E E
S I M P L I F Y I N G - ASSUMPT IONS
I n the present Section we w i l l solve the elast icit y problem under three
simplifying assumptions. Firstly, i n Sec. 4 . 1 , we w i l l give the connection
between the surface tractions and the elastic displacements. A plausibility
argument w i l l show us to do away w i t h the observed cross dependence
of t he problem of nor ma l tr act ion and the tangent ial tractions present
i n the contact area. This is done w i t h greater confidence, since the f o l l o w i n g
assumptions are of a mu ch more sweeping nat ure.
Secondly, i n Sec. 4 . 2 , we assume that the traction distribution changes
very slowly w i t h the lateral coordinate y, so that the slip can be calculated
as i f thi s change does not exist.
T h i r d l y , i n sec. 4 . 3 , we assume, led by the example of Carter's solution,
that the traction distribution for f i x e d lat eral coordinate y is the difference
of two halfelliptical tr ac ti on dist ribu tion s, one acting on the whole contact
w i d t h and the other on the adhesion interval, and the displacement
functions needed are calculated e x p l i c i t l y .

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 9/21
1 8
4 . 1 . The Connection Betwee n Surface T raction and Displacement in a
Halfspace. The G ross D ependence of Normal and Tangential Tractions
According to L O V E [ 8 ] , p. 19 1 and 24 3, the connection between the
elastic displacement which vanishes at i n f i n i t y , and the surface tractions
acting in the contact area E, are given by
v?{x, y, T \z\) = J L ƒ ƒ ̂ x{x', y') •
\r \z\ + r + t* r{\z\ \-r}* } +
( 4 . 1 )
(x -x ){y-y ) ( l - 2 c f f ) ( x - x ) ( y - y )
r3 r{\z\+r)z +
( s - s ' ) | z | ( l - 2 g T ) ( 3 - a . ' )
KN+r+
• = ] / (» — . r ' )2 + (?/ — ?/')2 + |z [
2
. Upper sign for upper halfspace,
lower sign for lower halfspace.
F o r the solution of the boundary value problem, we need only the
displa cement at the boundary of the bodies, th at is, at 2 = 0 . Furthermore,

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 10/21
1 9
w e a r e o n l y interested i n
u(x , y) = u+(x , y , 0 ) - u~(x , y , 0 ) , f o r t h e problem o f tangential
traction,
v(x, y) = v+{x, y, 0 ) - v (x, y, 0 ) , f o r t h e problem o f tangential
( 4 . 2 ) traction,
w(x, y) = iv+{x, y, Q)-w-{x, y, 0 ) , f o r t h e problem o f normal
traction.
Here w e have included t h e problem o f normal traction, i n order t o motivate
our use of Hertz's solution o f that problem. W r i t i n g
1 / l 1 \ a , ( a+ a ~\ n ( l ~ 2 a + 1~ 2a~
(4 .3 ) ê = i ( ^ + ^ J > ë = H ^ + ^ r
w e calculate u(x, y) , v(x, y) a n d w{x, y) , an d f inal ly find
u(x , y) = u+{x , y, 0)-u~{x, y, 0 ) =
(4 . 4 )
+ Y(x ,^ g ( * - * ' ) ( y - y ' ) _ w ^ « ( « - « O
i 2 3 i J 2
©(a;, ?/) s «+ (» , i / , 0 ) - « - ( » , y, 0 ) =
Ü. (a; , y ) rR*
/ \ 1 f f [r<r> i / \H ^ X , ) I F ( x ' V
' ) X ^ ~ ^ I>(x,y)=^Q li — — + J , i * > y j ^ 2 -t -
+ Z(x , y ) i ^ ] cfo ' i ? = l /O ^ ' - ^ T + ^ - y 7 ) 5 -
We see that u , v a n d w near t h e contact area a re composed o f three terms,
of t h e order o f magnitude o f
(4 .5)
u = 0( TxjnGl) + 0{oT y\nGl) + 0 ( K J V > 6 7 7 ) ,
v = 0(aT x\nGl) + 0(T y\nGl) + OixN jnGl),
\w = 0[nT x\nGl) + O^Ty/nOl) + 0({l-a)NjnGl),
T y , T y , N: t o t a l force i n t h e ( * , y, z)-directions.
W e s e e f r o m ( 4 . 3 ) that % vanishes when t h e elastic constants o f t h e
bodies a re equal: a+ = a~ = a, G+ = G ~ = G , o r when both bodies a re i n
compressible: a+ = o~ = i - I n these cases, u a n d v a r e n o t influenced b y Z
n o r i s w influenced b y X a n d Y. This implies that t h e Hertz theory c a n

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 11/21
2 0
be used for the det erm ina tion of the contact area E and the normal
pressure Z, while Z does not directly influence the relative slip (see eq. ( 3 . 4 ) ) .
I n table 2, we give the value of n for a few combinations of materials for
which i t does not vanish. We see f r o m this table that n is always quite
small. Thi s jus tif ies us to neglect it s influence altogether, an d we are the
more justified i n doing thi s, since we w i l l make assumptions of a much
more sweeping na tur e i n Sections 4. 2 an d 4 . 3 . I n a more precise theor y,
one would, i t seems, always be justified i n neglecting the influence of
X an d Y on w.
T A B L E 2
T h e value of x f o r different combinations of materials . T he fi rs t- menti oned is t he
ma t e r i a l of the upp er bod y ( — ) , the second-menti oned is the ma te ri al of the lower
b o d y ( + ) .
Mater ial Steel/Brass S tee l / Al um inum Steel/Glass
+ 0.03 + 0.06 + 0.13
Mater ial B r as s / Al um in um Brass/Glass Al um inum / G l as s
X + 0.02 + 0.10 + 0.03
R e m a r k . = 0 whe n (a+, 67+)= (o", G~), or when <x+=o—=Jj
; 0 wh e n o- *= J, 67* > 67±.
Indeed, T x an d T y are of th e order /uN, where p is the coefficient o
i f r i c t i o n which is ordinarily much smaller than unity. So the influence o
F x an d Fy on tu is of order O^inNjnGl), which would seem to be negligible
w i t h respect t o the influen ce of Z which is 0((l-a)NjnGl). Bu t the direct
influence of the normal pressure distribution on the tangential displace
ment differences u and v should be retai ned i n a more precise t heo ry; i t is
of the order 0(xNjnGl), while the influence of the tangential traction
[X , Y) is of the order 0{/.iNjnGl). So the relati ve influence of the te rm
w i t h H is larger by a fa ctor 0 ( [ 1 - o - j / y t 2 ) , as compared w i t h the problem
of the nor mal force.
A s we said before , we w i l l here neglect the terms w i t h %. This implies
tha t the H er tz theo ry can be used for the de ter min ati on of the contact
area and the normal pressure, while the normal pressure does not directly
influence the relative slip. The hori zont al displacement differences u an d v
are hence given by
1 »» P „ , . .. f l - o - a{x-x'fu(x, y) =
7lG E LX(x , y')
R
+ y')o{x-x')(y-y')'
i?3
i?3
dx dy',
+
( 4 . 6 )
v(x, y) X ( x , y>) «*-<o<*-jn +
+ Y ( x W ) [ ̂ +
a - ^ } ] d x ' d y ' ,
R = y-fiZ-x')z + (y-y')z.

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 12/21
21
4.2. The Strip Theory Assumption
We w i l l now assume that the traction distribution changes very slowly
i n the lateral (y) direction. One would judge that the results based on
this hypothesis are best v a l i d for ellipses which are narrow in the direction
o f r o l l i n g . This is indeed partially borne out by the results.
On t he basis of thi s assumpt ion we calculate the displacement differences
u and v in the point {x, y), as i f the tan genti al tra ctio n distribution
X(x', y'), Y(x', y') were given by
(4.7) X(x', y')=X(x', y), Y(x', y') = Y(x', y),
where we let y' run in principle f o r m - c o to +oo . Le t the w i d t h of the
contact area at the line yr—y be given by c,
(4.8) c = a l / l - ( # ) 2 ,
then the new contact area E' is given by
(4.9) E' = {x',y': -c<x'<c, -M<y'-y<M, M -> oo}.
We do not set M = oo, since this would lead to i n f i n i t e u and v. The large
term vanishes, however, when we differentiate u and v w i t h respect to x,
so that after the differentiation is performed, we can let M -> oo.
We f i n d the f o l l o w i n g expressions for u and v:
(4
'I0
> * v) - ± Uw, v) & V+
1 f = }/(x-x'y+y'z.
The integrals w i t h — as in tegra nd vanish, since the integrands
are odd i n y'. Furthermore, we can write y'*=fz
—{x-x')z
. So we find
{ f = ]/{x-x')z
+y'z
.

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 13/21
5 4
spin
direction of traction
y=-qb
direction of sli p, y<0
x, rolling
direction of slip y>0
y = qb
direction of traction
(a)
spin
direction of traction
direction of sl ip, y=0
x, rolling (b)
direction of slip , y >0
direction of traction
F i g . 7 . Tr act ion an d s l ip for p u r e s p in , a/b = 1, a — 0.50. (a): ip = 0.305.
( 6 ) : yi = 0.800. Open arrows: slip. Closed arrows: traction.
Negative diss ipat ion areas shown shaded. T rac t i on and s l ip are m i r r o r an t i - s y m m et r ic
a bout the a-axis. T he scale of t he ar row s i n (&) is h a l f t he scale of the a rrows in (a).

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 14/21
5 5
F i g . 8. Tr ac ti on an d slip for pur e spin , a/b = 0.2, a = 0.50.
(a) y> = 0.305, (b) if = 0.800. Op en ar row s: slip.
Closed ar rows: t rac t io n. Nega tive diss ipa t ion area shown shaded. T r ac t i o n and
slip ar e m i r r o r ant i- symmet r ic about the s-axis. T he scale of the arrows i n the same
i n (a) as in (b).

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 15/21
56
itiN
05
03
0-2
0-1
numerica
o numerica
values £ =b
values £ =
D
o-=0-28
>2 a=0-28
©
/
/o
of/
S~—5— •g=0-2/o
of/° o
o o ^ So
7
0 0-2 0« 0-6 0-8 10
Fig. 9 . The tot al force for pure spin; a = 0 . 2 8 . Also shown are nume rical values
o f the force from K A I K B B [ 6 ] .
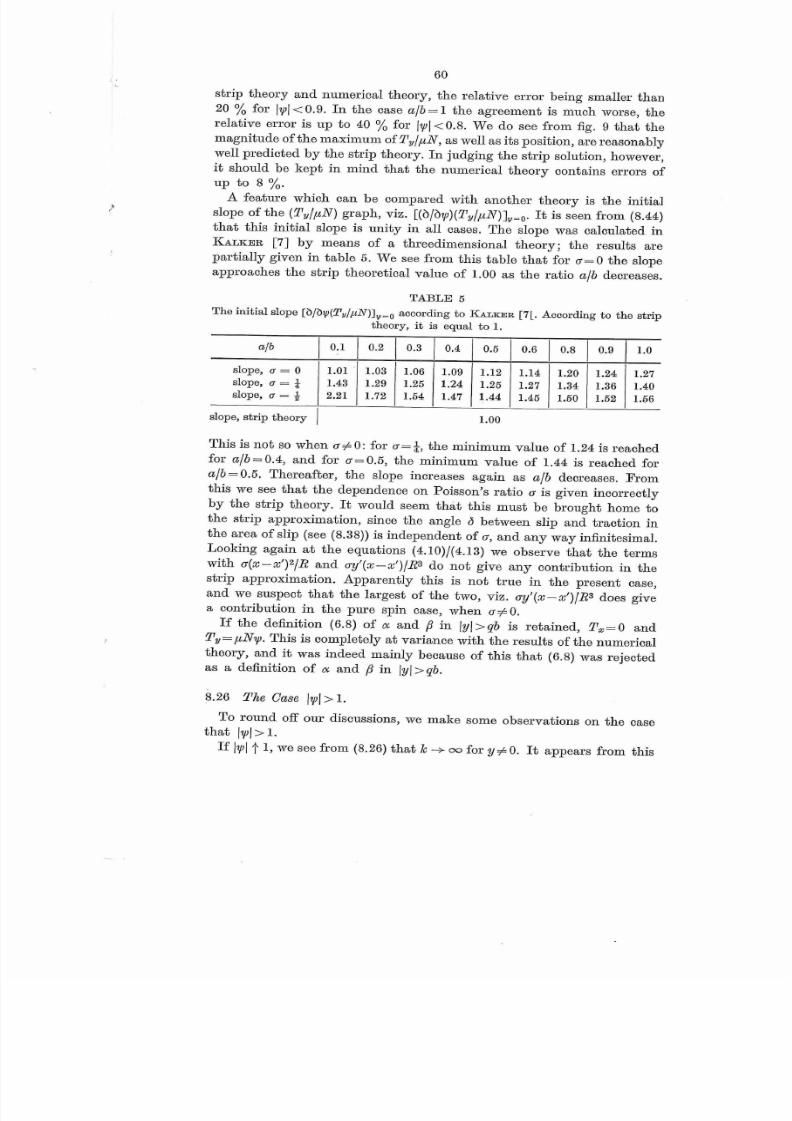
I t is seen f r o m f i g . 9 that in the case a/5 = 0 . 2 , cr = 0.28 the strip theory
gives f a i r l y good results for values o f \ip\ up to 0.9 (err or: up to 20 ) .
I n the case of a circular contact area (ajb= I, c r = 0 . 2 8 ) of fig. 9 the error
is considerably larger (up to 40 % for \y>\<0.8). The fac t th at the soluti on
gets worse when \y>\ increases is borne out i n th at the character of the
curve of the strip solution for large spin is not the same as that of the
numerical theory.
From a comparison of fig. 9 w i t h fig. 6 (the to ta lf or ce i n case of vani shing
spin), it is seen t ha t especially for ellipses nar row in the dire ction of
r o l l i n g the str ip theory is much better for pure creepage than for pure spin.
8 . 2 1 . The Division of the Contact Area
As always i n the case when \y\< I, the area of adhesion J$n borders
on the leading edge of the contact area. The separatrix of Eg an d E% is
most easily constructed by means of the distance h f r o m the trailing
edge of E to the separatrix:
(8.26) (8.32) h = 2 \ f y \ j { l - a ) ] / Y ^ f .
The division of the contact area into an area of slip and an area of adhesion
is shown i n fig. 7a for the circle case a/b=l, Poisson's ratio cr = 0 . 5 0 ,
and the spin y> = 0 . 3 0 5 . This is the case treated by P O O N [ 1 0 ] . The division
o f the contact area is shown i n fi g. 7b for a/6 = l , o - = 0 . 5 0 , f = 0.8, i n

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 16/21
5 7
fig. 8a for a/6 = 0.2, rr = 0.50, y = 0.305, and in f i g . 8b for a/b = 0.2, o- = 0.50,
y> = 0.8.
The angle 9 of the apex of the area of adhesion is
O I „ . l
(8.33) 9 = 2 cot"1
( l - o - ) Vi-y>2
i n the case of fig. 7a, 9 = 7 6 ° . Thi s is precisely the value fou nd by P O O N [10].
The angle 9 diminishes monoton ically as tp increases, an d finally vanishes
f o r tp — l. I t should be noted tha t neither h nor 9 depends on the axi al
ratio g of the contact ellipse.
8.22. The Traction Distr ibution.
The traction distribution is given in (5.44) w i t h the parameters a, ft,
as in (8.28). We find:
X = (1/a) f.iAG ] / l - y2
sign ( - y>y) {]/c 2-x 2 +
- Yhz-x *}, x' = x-c + h, in Eh
;
= / . i Z ] / l - f 2
sign {-tpy) | # I < # , i n Eg',
(8.34) < = fiZ sign ( - y>y) \y\ > qb,
T ^ f i Z f \y\<qb,
= o \y\>qb,
Z = AG]/l-{xla)2-(ylbf = ^t ? (c/a) H ' l - ( * / « ) » .
We see tha t i n the locked area, Y is a constant m u l t i p l i e d by fxZ, the
constant being the spin parameter y> (see fig. 2c). X as always has the same
character as i n the case of vanishing spin. We see f r o m ( 8 . 3 4 ) tha t the
traction is mirror antisymmetric about the £c-axis (i.e., the .^-componentis odd i n y, the ^/-component is even i n y). I n figs. 7 and 8, the t ra cti on
has been sketched for the values of the parameters which prevail there,
f o r \y\<bq. I n strips wit hout locked area, \y\>bq, the ^-component of
the traction vanishes entirely.
8 . 2 3 . The Slip
The slip is given by ( 8 . 2 9 ) :
(S
X , Sy) =
= [2/ tA(l - ff)l/T^2 ( l /o) Vz *-Jfi sign ( - rpy), 0) in Eg, \y\<qb,
= ( f ^ é [ - w - | - (1 a)x sign ( f y ) ] , ipx) , \y\>qb.\ a a /
We see tha t i n strips w i t h locked area (\y\<qb), the slip is paralle l to
the .r-axis, while in strips without locked area (\y\>qb), i t does no t have
a f i x e d direction. The slip is mirror antisymmetric about the a;-axis,

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 17/21
58
as is the traction. The slip has been sketched i n figs. 7 and 8 for the stri ps
without locked area \y\>qb. I t is seen f r o m fig. 7b, that large slips occur
close to the adhesion area whe n |y| = 0.8. This underlines once more the
ba d quality of the solu tion fo r large values of \%p\.
8.24. The Angle between $%> and Traction
We first consider the angle between slip and traction in the area of
slip of the strips w i t h adhesion area (\y\<qb). This is act ual ly quite easy
to do, since the angle between slip and r o l l i n g direction (the positive
.T-axis) vanishes when fy<0, and is 180° when ipy>0. I t can be found
f r o m (8.34) that when \y\<qb the tra cti on in the slip area makes an
angle f w i t h the positive rc-axis, which is given by
(8.36)t = sin"
1
sign (-ipy)]+ [1+sign (tpy)] • 90°
— 90° < sin-1 x < 90°, sin"
1
i n degrees,
while the angle of the slip w i t h the positive a;-axis is given by
(8.37) e = [1+sign {yy)] • 90°.
The angle <5 bet ween slip and traction becomes then
(8.38) 8 = e-£ = sin-i sign (y)].
We see f r o m this that \d\< 9 0 ° , f r o m which i t follows that the dissipation
is always pos it ive . |<5 increases f r o m 0° when yj = 0 to 90° when | f | = l .
Int erme diat e values are given i n table 4. I n the case of figs. 7a and 8a,
|<5 = 17.8° (y = 0.305) i n \y\<qb. I t should be note d th at the angles e, <5
and f are independent of the axial ratio ajb of the contact ellipse.
T A B L E 4
The angle \d\ be tween slip a n d t r a c t i o n i n Eg, \y\<qb, £=ri = Q.
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
|«5| = 5.7° 1 1 . 6 ° 1 7 . 4 ° 2 3 . 5 ° 3 0 ° 3 7 ° 4 4 ° 5 3 ° 6 4 ° 9 0 °
I n the strips \y\>qb, the angle between tr act ion and slip varies. The
traction is always paral le l to the a-axis. We see f r o m figs. 7 and 8 that
the angle becomes smaller as \y\ increases. Analytically this can be seen
f r o m the fact that on lines w i t h x = constant , the «/-component of the
slip is constant, while the term —ipy of the ^-component increases i n
absolute value. Also, as we approach the ti ps of the ellipse, the ma xi mu m
absolute value c of \x\ decreases, which also has the effect of improving
the angle.
I t can be shown that in all cases 0<y>< 1 there is an area of negative
dissipation present i n the region \y\>qb which is shown shaded i n figs. 7
and 8. I t is dete rmin ed by the condition (see (8.31)):
( 8 . 3 9 ) P(x,y){ I vyl — ( i — o r ) < o
\w\
1-0< X < c.

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 18/21
8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 19/21
8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 20/21
6 1
that w i t h increasing spin the area of adhesion Eu becomes smaller and
smaller, and that i t vanishes in the l i m i t i n g case \y\ = 1 . I t can be a rgued
that it would seem that i n the case \y\ > 1 no area of adhesion form s at a ll :
according to ( 8 . 2 6 ) , k is then purely imaginary. This would lead to a
completely vanishing total force. However, we see from fig. 9 th at according
t o the num erica l theory, a nd also according to J O H N S O N ' S experiments [ 5 ] ,the tangential force does not vani sh: it vanishes only i n the l i m i t \ip\ -^oo.
So there is l i t t l e poin t in applying the st rip theory to the case of pure
spin, when | t y > | > l .
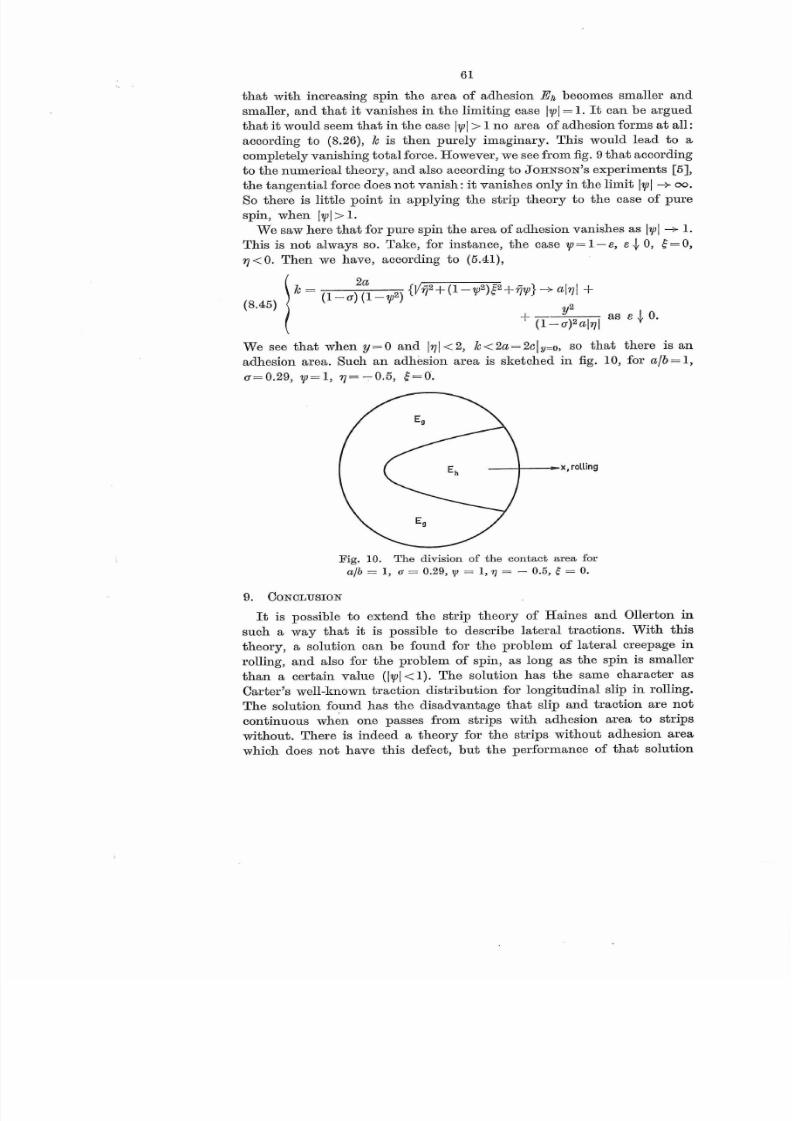
W e saw here tha t for pure spin the area of adhesion vanishes as \ip\ — >• 1.
This is no t always so. Ta ke, fo r instance, the case ip—l e, e | 0, f = 0,
?]<0. Th en we have, according to (5.41),
2a{Yrj* + { l - y j2 ) i 2
+ fjy>} -> a\rj\
( 1 — a )2a\7]\ Y
W e see tha t when ?/ = 0 and | ? ? | <2 , k<2a = 2c\y= 0, so t ha t ther e is an
adhesion area. Such an adhesion area is sketched i n fig. 1 0, fo r a/b = l,
o- = 0 . 2 9 , ip=l, f)=-rQ. , 1 = 0 .
x, rolling
F i g . 10. T he d i v i s i o n of the con ta ct area fo r
a/ b = l , o - = 0. 29, y> = 1, t j = — 0.5, f •= 0 .
9 . CONCLUSION
I t is possible to exten d the st rip theor y of Haines and Ollerton i n
such a wa y th at i t is possible to describe la te ra l traction s. W i t h this
theory, a solution can be fou nd for the p roble m of late ral creepage i n
r o l l i n g , and also for the p ro ble m of spin , as long as the spin is smaller
than a certain value (\f\<l). The solution has the same character as
Carter's well-known t ract ion distribution for longitudinal slip i n r o l l i n g .The soluti on fou nd has the disadvantage tha t slip and tr acti on are not
continuous when one passes f rom strips w i t h adhesion area to strips
without. T here is indeed a the ory for the str ips without adhesion area
which does no t have thi s defect, but the perfor mance of tha t solution

8/12/2019 1967-13 a Strip Theory for Rolling With Slip and Spin
http://slidepdf.com/reader/full/1967-13-a-strip-theory-for-rolling-with-slip-and-spin 21/21
62
i n the to tal force was worse tha n the perfor mance of the discontinuous
theory.
The theory was discussed in detail for the case of pure creepage and
for the case of pure spin. I n the case of pure creepage it was found that
the theory worked w e l l , especially in the case of contact ellipses which
are narr ow i n the d ire ction of r o l l i n g . As to the total force, a good quanti
tative agreement w i t h K A L K E R ' S numeri cal theory [6 ] was fou nd ; thi s
agreement was not so good i n the case of a circular contact area, where
apart f r o m a nume rica l disagreement i t was also foun d that the dependence
on Poisson's ratio was given incorrectly.
I n the case of pure spin there is much less agreement w i t h the numerical
theory. Por contact ellipses which are na rrow i n the di recti on of r o l l i n g ,
a rela tive error of not more t ha n 20 % is present i n the results when
\y>\ < 0.9 . For the case of a circular contact area, the relative error can
grow to as mu ch as 40 % when j y i | < 0 . 8 . From a comparison w i t h the
theory of infinitesimal pure spin it is seen that in the case a = 0 there is an
asymptotic agreement for ajb^O. I n the case o^O this is not true;
the error is at tr ibu te d to the stri p the ory assumption (see sec. 4.2) .
I n the case of creepage without spin, see H A I N E S [2] , and H A I N E S -
O L L E R T O N [ 3 ] , the area of adhesion is excel lently predicted by the s tr ip
theory. The same seems to hold in the case of pure spin, i f one may judge
f r o m the exper iment of Poon on the case a/b—1, a=0.5, y > = 0 . 3 0 5 .
R E F E R E N C E S
1 . C A B T E R , F. W. , On the A c t i o n of a Loc omot ive D r i v i n g Whee l . Proc. R oy .
So c, A 112, 151-1 56 (1926).
2 . H A I N E S , D . J . , Contact Stresses i n F l a t E l l i p t i c a l Contact Surfaces which
Support Ra dia l and Shearing Forces duri ng R o l l i n g . Inst . Mech.
En grs. , 179, Pa rt 3.
3. • , an d E . O L L E R T O N , Contact Stress D i s t r i bu t i ons on E l l i p t i c a l Contact
Surfaces Subject ed to Ra di al an d Tan gen tia l Forces. Proc. I ns t .
Mech. Engrs., 177, 95-114 (1963).
4 . J O H N S O N , K . L . , T a nge n t i a l T ra c t i ons a nd M i c r o s l i p i n R o l l i n g Contact. Proc.
S ymp. R o l l i n g Contact Phenomena. E d. B i d w e l l , Elsevier 1962,
p . 6 sqq .
5. , The Inf lue nce of Elast ic De for mat ion up on the M o t i o n o f a B a l l
R o l l i n g bet ween T wo Surfaces. Proc. Ins t . Mech. Engrs ., 173,
795-810 (1959).
6. K A L K E R , J . J . , R o l l i n g w i t h Slip an d Spi n i n the Presence o f D r y F r i c t i o n .
Wear 9, 20-38 (1966).
7. , O n th e R o l l i n g Cont act o f T wo Elasti c Bodies in the Presence o f
D r y F r i c t i o n . D octo ral Thesis, to appear.
8. L O V E , A . E . H . , A Treatise on the The ory of E l as t ic i ty . 4t h E d . Cambri dge, 1927.
9. M t r s K H E M S H V i M , N . I . , S i ngula r In t e gra l E q ua t i ons . Noordhoff 1953.
1 0 . P O O N , S . Y . , A n E xpe r i me n t a l S t ud y of t he Shear T r a c t i o n D is t r ib u t io n i n
R o l l i n g w i t h Spin. Wear, to appear.
1 1 . V E R M E U L E N , P . J . a n d K . L . J O H N S O N , Conta ct of Non spher ical Bodies Trans
m i t t i n g T angen t ia l Forces. J . A p p l . M ech ., p. 338-340 (1964).





























