Embed Size (px)
Citation preview

1
Vertex fitting
Zeus student seminarMay 9, 2003
Erik MaddoxNIKHEF/UvA

2
Outline
• What is vertexing?– K0
s in new data ( example )
– The least squares vertex fit– A 2-dimensional example– Using a beam constraint
• More on vertexing– Kalman filtering
• Do-it-your-self-interactive-vertexing!

3
A Zeus Event
• Hits are in the CTD and MVD
• Tracks are fitted in CTD and MVD
• Is a track primary or secondary?

4
Introduction
• Tracks are measured with parameter vector p and covariance matrix Vp
– The precision of the parameters can be improved by the constraint that they all come from the same vertex. (vertex refitted)
– Tracks not coming from the primary vertex• Secondary decay (examples K0
s , D*±, b -> µµc)
• Scattering in the detector material (secondary interaction)• Multiple events per bunch crossing expected at LHC.
– Well enough measured tracks needed.

5
K0s mass signal
• K0 decays to +- – c is 2.68 cm
• Method– Select secondary vertices
consisting of a opposite charged track pair
– Assume mass, plot invariant mass of K0
– Improve selection by requiring that the K0 comes from primary vertex
-> Primary vertex

6
Mass spectrum• Expected mass: 0.498 GeV
• Width depends on the resolution of the detector, a perfect detector would give the ‘natural width’ ( ) of the particle
• Background processes:
- Photon conversion e+e-
- Random combinations

7
Decay length
-K0s using CTD only tracks
-K0s using CTD and MVD tracks
With the MVD more secondary K0s are found!
correct for the boost of the particle: c = l /

8
5 helix parameters
• W = q/R0
• D0
• Z0
• T=tan(dip)These describe the charged particle trajectory in a uniform magnetic field
Used in 2D example

9
The (2D) vertex problem
• Tracks (p) are now ‘measurements’– Parameters are:
• Find best estimate for x (vertex) and i (refitted track)
• use LSM
000020
200 cossin yx
qx
qxyxD
0)sin(
)cos(
0
0
y
x
q
q

10
2 equation
n
nD
D
y
1
1
)],h([)],h([ 12iy
Ti xyVxy
np
p
p
y
V
V
V
V
,
2,
1,
00
00
00
2*n measured valuesError matrix

11
• Linearize h near x0 , 0,i
– With
-> (h-h0) describes how the ‘measurements’ change if the vertex parameters change
)()(),(h),h( ,00,000 iiiiii BxxAxx
00
00
yx
y
D
x
D
Aii
ii
i
i
i
i
i
i
D
B

12
• Different notation
nnn
ii
x
BA
BA
BA
xx
122
11
,000
00
00
00
),(h),h(
= H pvertex
n+2 parameters
to fit

13
LSM estimation of the vertex parameters
• Iterative procedure to find the minimum 2
1. Start with initial ‘guess’ for vertex parameters: p0,vtx
2. Calculate the track parameters h0( p0,vtx ) and the derivative matrix
H( p0,vtx )
Vvtx = (HTVy-1H)-1
pvtx = p0,vtx + Vvtx HT (y- h0 )
calculate the new 2
3. Do step 2 again with p0,vtx = pvtx until the change in 2 is small enough.
Error propagation
New vertex parameters

14
2d detector model
- Generated track
- Fitted track
Track 1
D = -0.127, = 1.623
Cov = ( 0.690 0.0416 0.0416 0.00294 )
Track 2
D = -1.118, = 3.395
Cov = ( 0.582 0.0350 0.0350 0.00253 )
1
2

15
After the vertex fit
- Generated track
- Fitted track
- Vertex refitted track
- Vertex
Vertex
x = -0.0410041, y = -1.6349
Refitted tracks
1= 1.623, 2 = 3.935
x = 0.869, y = 1.302
Cov = (0.755 0.716 0.044 -0.0023 0.716 1.696 0.045 0.0433 0.044 0.045 0.0029 -4.6e-08
-0.0023 0.0433 -4.6e-08 0.0025 )
Later we will improve the fit, by using a beam constraint

16
3 tracks
The vertex refitted tracks all intersect the vertex
ZOOM- Generated track
- Fitted track
- Vertex refitted track
- Vertex
17
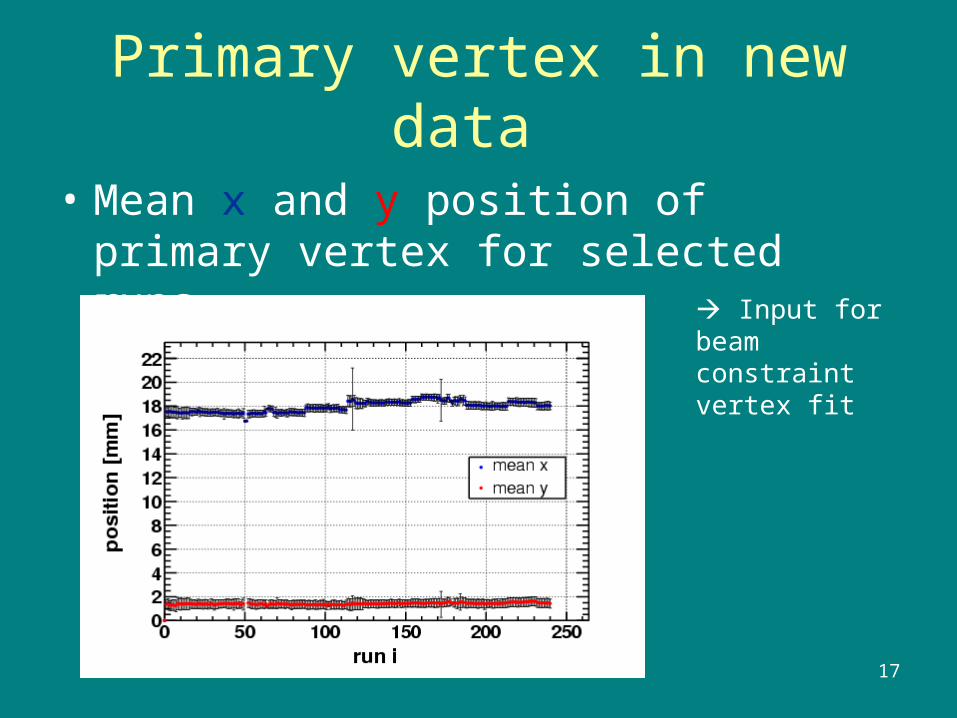
Primary vertex in new data
• Mean x and y position of primary vertex for selected runs.
Input for beam constraint vertex fit

18
Using a beam constraint
• Information about the beam position and profile can be put into the vertex fit.– The beam position is vx, vy
with covariance V0 for the width.
n
n
y
x
D
D
v
v
y
1
1
np
p
p
y
V
V
V
V
V
,
2,
1,
0
0000
0
000
000
000
2*n + 2 Measured values
Error matrix

19
• Derivative matrix H and first extimate h0
• The procedure to find the vertex parameters stays for the rest the same.
vtxpn
n
y
x
nn D
D
v
v
h
BA
BA
BA
I
H
,0
1
1
022
11
,
00
0
00
00
000

20
Vertex constraint: (0,0) with error of 0.25 compare (slide 15)

21
• Without beam constraint:2*n – (n+2) = n-2 degrees of freedom
‘need at least two tracks to fit a vertex’
• With beam constraint2*n+2 – (n+2) = n degrees of freedom
‘a vertex fit with 0 tracks gives back the beam constraint’

22
Kalman filter vertex fit• In high multiplicity events
have to invert large (n*n) matrices , cpu time ~ n3
• LSM is not very flexible to find secondary vertices.– All tracks are evaluated in the same algorithm
• Better to evaluate the vertex track for track– Small matrices– Remove outliers (secondary tracks)– Start with high quality tracks
• Kalman filter fitting is then very useful– Kalman filter is used to estimate a state of a dynamic system in time– Consider the vertex parameters and covariance as a ‘state vector’– Evaluate the vertex for a single track, use the 2 of the step to decide.– If the 2 do a fitting step, add the information of the current track.
(update vertex and covariance)• Smoothing
– Update the vertex refitted tracks for the latest vertex position.