Embed Size (px)
Citation preview
1
Software Architecture
Bertrand Meyer
ETH Zurich, March-May 2009
Lecture 15: Designing for concurrency& real-time
The world is increasingly concurrent
ProcessesNetworking, the Internet, the WebMultithreadingMulticore computing
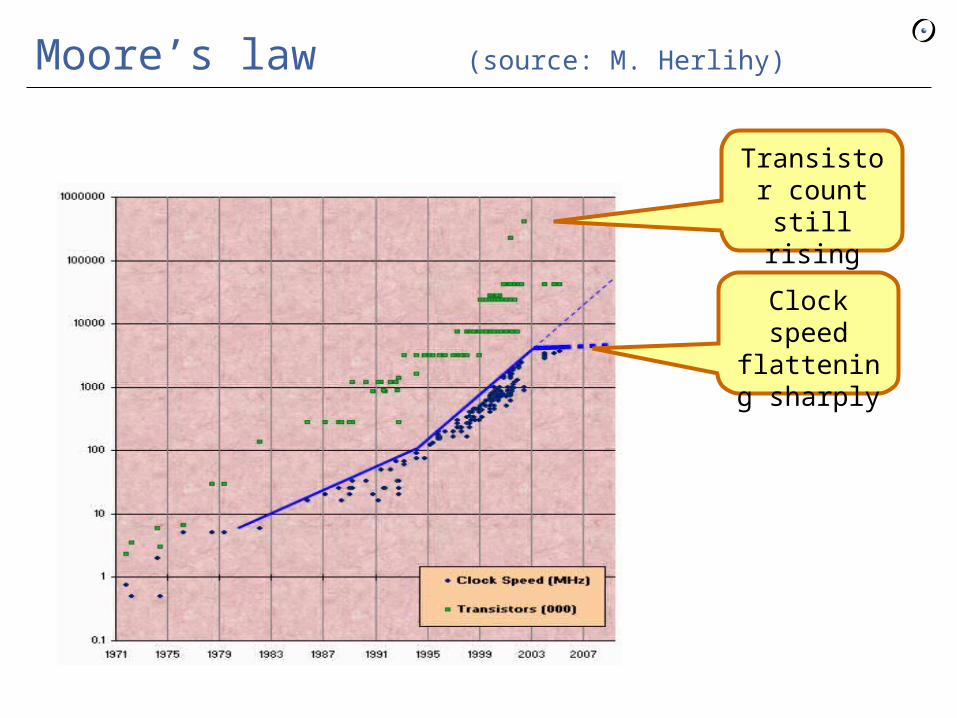
Clock speed
flattening sharply
Transistor count still
rising
Moore’s law (source: M. Herlihy)
Statements about concurrency
Intel: “Multi-core processing is taking the industry on a fast-moving and exciting ride into profoundly new territory. The defining paradigm in computing performance has shifted inexorably from raw clock speed to parallel operations and energy efficiency”.
• Rick Rashid, head of Microsoft Research “Multicore processors represent one of the largest technology transitions in the computing industry today, with deep implications for how we develop software.”
• Bill Gates: “Multicore: This is the one which will have the biggest impact on us. We have never had a problem to solve like this. A breakthrough is needed in how applications are done on multicore devices.”
See John Markoff, Faster Chips Are Leaving Programmers in Their Dust, New York Times, 17 Dec. 2007

Why is concurrency hard?
Ordinary modes of reasoning are sequentialRisks:
Data race
Deadlock
Starvation
Testing and debugging are harder (some say impossible)
Plus, for “hard-real-time” systems, the difficulty of guaranteeing response times and memory occupation

Example
{x = 0, y = 0} x := x + 1y := x + y + 1{x = 1, y = 2}
{x = 0, y = 0} x := x + 1y := x + y + 1{x = 1, y = 2}
{x = ?, y = ?}
77
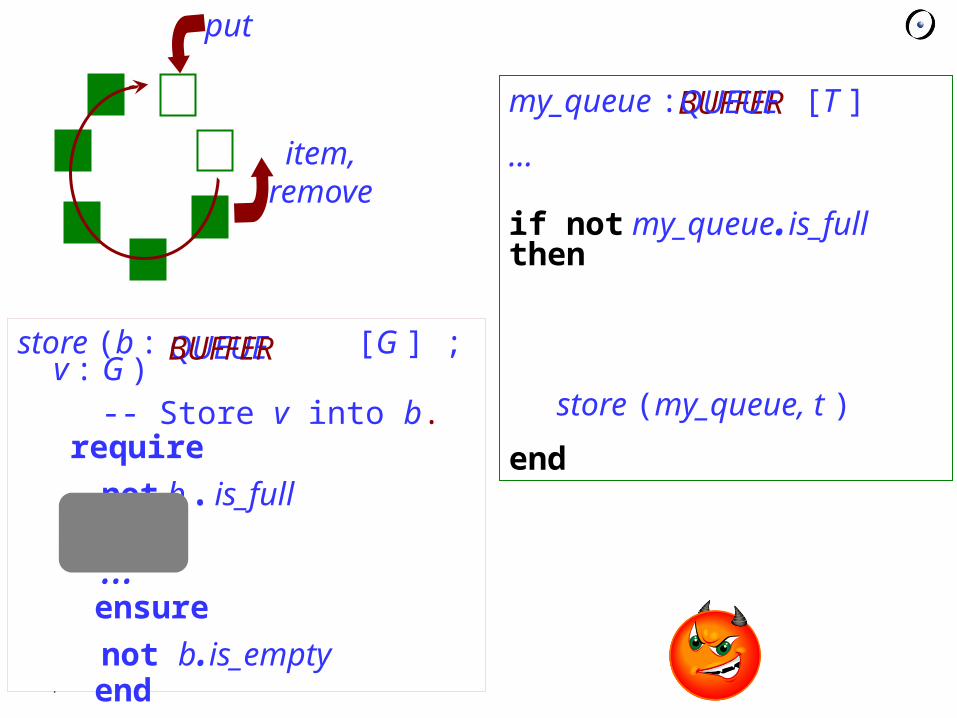
store (b : [G ] ; v : G )
-- Store v into b. require
not b.is_full do
… ensure
not b.is_empty end
QUEUE BUFFER
my_queue : [T ]
…
if not my_queue.is_full then
store (my_queue, t )
end
BUFFER QUEUE
put
item, remove

Architectural models
Three general styles:
Shared memory
Message passing
Event-driven

Three kinds of desirable properties
Safety: no undesiredsituation will arise
“No two lights will begreen at the same time”
Liveness: there will alwaysbe an applicable event
“Some light will turngreen”
Fairness: every applicable event will happen after finite time
“If there is at least one car waiting, the light will turn green”

Concurrency frameworks
1. Low-level mechanisms, e.g. threading libraries
2. Graphical models
3. Concurrent extensions to modern programming languages, e.g. SCOOP
4. Process calculi

Statecharts (UML)
Finite-state machine for describing behavior of reactive systems Events cause transitions between states. They can have:
Parameters Guards Actions Time values
Kinds of events: SignalEvent: asynchronous, queued CallEvent: synchronous, blocks sender ChangeEvent: occurs when state value changes TimeEvent: associated with timeout

Statechart exampleSource: B. Powel-Douglass

Temporal logic
Logic plus new operators:
□ f f holds now and rest of execution
◊ f f holds sometime from now on
f f holds at the next state f U g f holds until when and if g holds
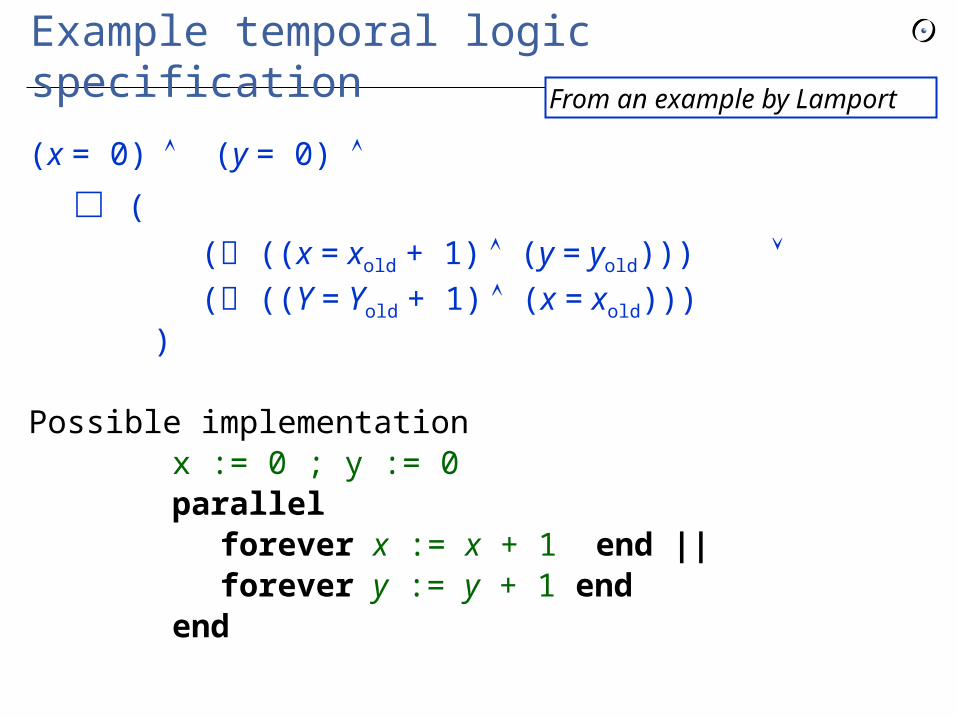
Example temporal logic specification
(x = 0) (y = 0)
□ ( ( ((x = xold + 1) (y = yold))) ( ((Y = Yold + 1) (x = xold)))
)
Possible implementationx := 0 ; y := 0parallel
forever x := x + 1 end ||forever y := y + 1 end
end
From an example by Lamport
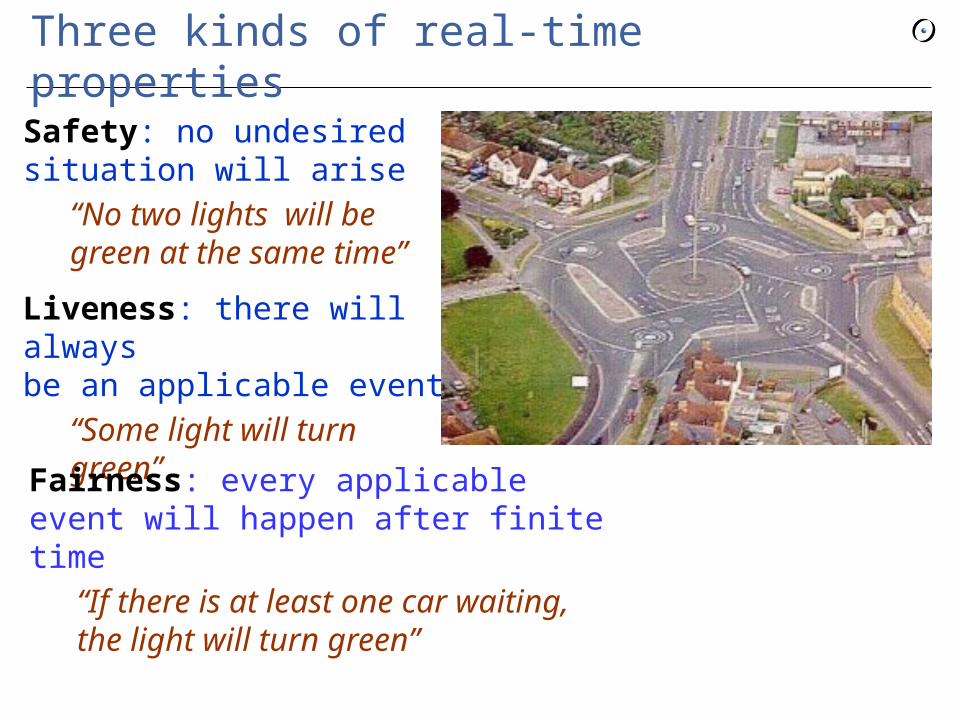
Three kinds of real-time properties
Safety: no undesiredsituation will arise
“No two lights will begreen at the same time”
Liveness: there will alwaysbe an applicable event
“Some light will turngreen”
Fairness: every applicable event will happen after finite time
“If there is at least one car waiting, the light will turn green”
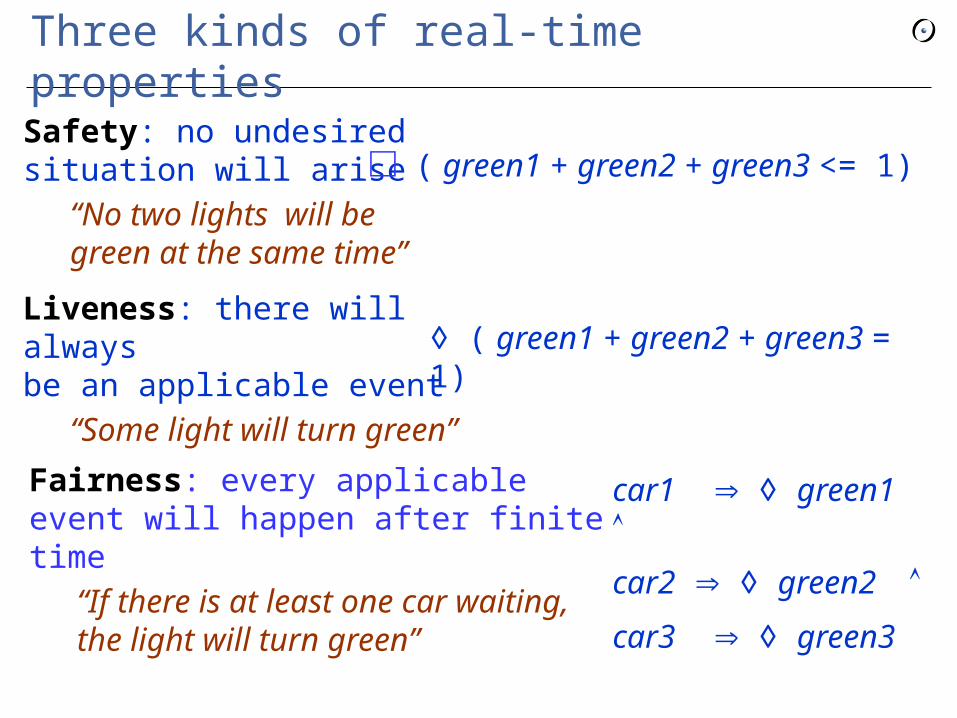
Three kinds of real-time properties
Safety: no undesiredsituation will arise
“No two lights will begreen at the same time”
Liveness: there will alwaysbe an applicable event
“Some light will turn green”
Fairness: every applicable event will happen after finite time
“If there is at least one car waiting, the light will turn green”
□ ( green1 + green2 + green3 <= 1)
◊ ( green1 + green2 + green3 = 1)
car1 ◊ green1
car2 ◊ green2
car3 ◊ green3

The SCOOP model
Aim: smallest possible extension of sequential object-oriented model, preserving classical modes of reasoning

1818
store (b : [G ] ; v : G )
-- Store v into b. require
not b.is_full do
… ensure
not b.is_empty end
QUEUE BUFFER
my_queue : [T ]
…
if not my_queue.is_full then
store (my_queue, t )
end
BUFFER QUEUE
put
item, remove

SCOOP principles
Each object is handled by a “processor”
Object handled by different processor is specially declared:
x: separate T
Passing separate values as arguments locks them:p (sep_x, sep_y)
Preconditions serve as wait conditions:p (x, y: separate T)
requirenot x is_full
do … end

20
Dining philosophers
class PHILOSOPHER inheritPROCESS
rename setup as getupredefine step end
feature {BUTLER}step
do think ; eat (left, right)
end
eat (l, r : separate FORK) -- Eat, having grabbed l and r.
do … endend

The calculi
CSP (Hoare)CCS, Pi-calculus (Milner)
Aim: provide a formal basis for reasoning about concurrent systems
22
CSP origins
Communicating Sequential Processes: C.A.R. Hoare
1978 paper, based in part on ideas of E.W. Dijkstra (guarded commands, 1978 paper and “A Discipline of Programming” book)
Revised with help of S. D. Brooks and A.W. Roscoe
1985 book, revised 2004
23
CSP purpose
Concurrency formalism Expresses many concurrent situations
elegantly Influenced design of several concurrent
programming languages, in particular Occam (Transputer)
Calculus Formally specified: laws Makes it possible to prove properties of
systems
24
Basic notions
Processes engage in events
Example:
BDVM = (coin coffee coin coffee STOP)
a(BDVM) = {coin, coffee} u
25
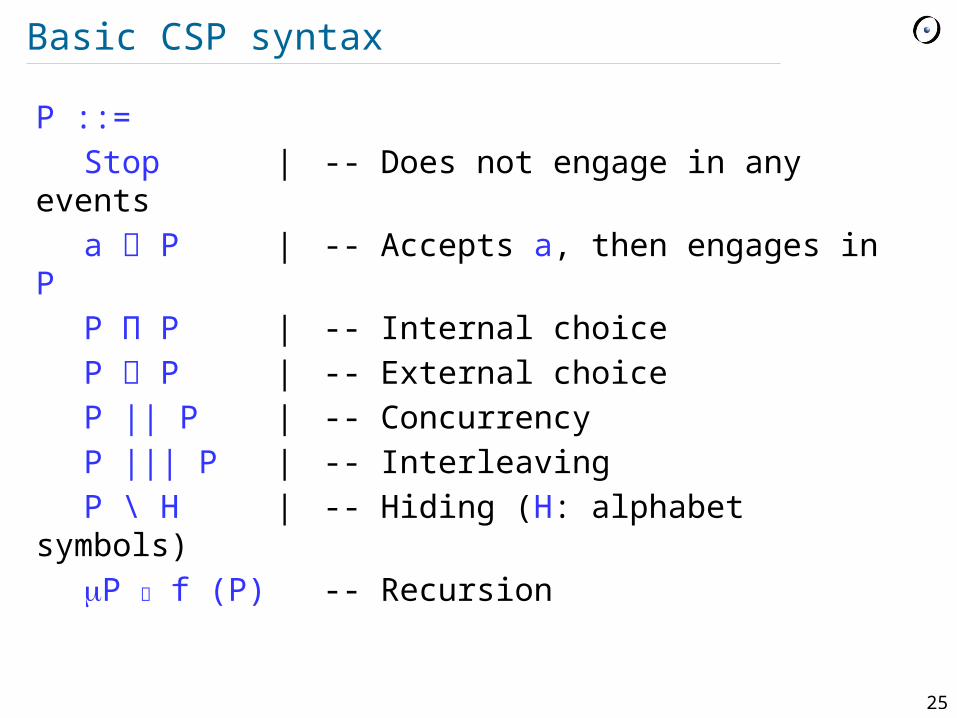
Basic CSP syntax
P ::= Stop | -- Does not engage in any events
a P | -- Accepts a, then engages in PP П P | -- Internal choiceP P | -- External choiceP || P | -- ConcurrencyP ||| P | -- InterleavingP \ H | -- Hiding (H: alphabet
symbols)mP f (P) -- Recursion

26
Some examples
CLOCK = (tick CLOCK)
This is an abbreviation forCLOCK = mP (tick P)
CVM = (in1f (coffee CVM))= (in1f coffee CVM) -- Right-
associativity
CHM1 = (in1f out50rp out20rp out20rp out10rp)CHM2 = (in1f out50rp out50rp)
CHM = CHM1 П CHM2

27
More examples
COPYBIT = (in.0 out.0 COPYBIT in.1 out.1 COPYBIT)

28
More examples
VMC =(in2f
((large VMC) (small out1f VMC))
(in1f
((small VMC) (in1f large VMC))
FOOLCUST = (in2f large FOOLCUST in1f large FOOLCUST)
FOOLCUST || VMC = mP (in2f large P in1f STOP)

29
Internal non-deterministic choice
CH1F = (in1f ((out20rp out20rp
out20rp out20rp out20rp CH1F)П
(out50rp out50rp CH1F)))

30
Laws of concurrency
P || Q = Q || PP || (Q || R)) = ((P || Q) || R)
P || STOPaP = STOPaP
(c P) || (c Q) = (c (P || Q))(c P) || (d Q) = STOP -- If c ≠ d
(x: A P (x)) || (y: B Q (y)) = (z: (A B) (P (z) || Q (z))

31
Laws of non-deterministic internal choice
P П Q = Q П PP П (Q П R) = (P П Q) П Rx (P П Q) = (x P) П (x Q)
P || (Q П R) = (P || Q) П (P || R)(P || Q) П R = (P || R) П (Q || R)
The recursion operator is not distributive; consider:
P = mX ((a X) П (b X))Q = (mX (a X)) П (mX (b X))
Designing concurrent systems
The basic advice today:Keep the concurrency aspectsseparate from the other architectural
constraints
Software architecture
DesignPatternsComponentsArchitectural styles
The key is to find the right abstractions





























