Embed Size (px)
Citation preview

1
Multiuser Detection (MUD)Combined with array signal processing
in current wireless communication environments
2002.4.10.Wed.
박사 3 학기 구 정 회

2
Contents Introduction Motivation Definition System model Basic algorithms Space-time multiuser detection Current research issues Proposals Conclusion

3
Introduction Multiple access interference (MAI)
Interference between direct-sequence user A factor which limits the capacity and
performance of DS-CDMA system As the number of interferers or their power
increases, MAI becomes substantial
Multiuser detection Area of research with potential to
significantly improve DS-CDMA communication
Combination with array signal processing

4
Motivation (1/2) Conventional detection
Matched filtering + Sampling of the received signal + Decision device
In a single path transmission environment Optimal in the sense that the SNR is
maximized Maximum-likelihood (ML) detection
In a multiuser environment The SNR is still maximized Not ML due to the presence of MAI

5
Motivation (2/2) CDMA is interference-limited system : NO !
Conventional detector is interference-limited : Sub-optimal approach
Conventional detector does not take into account the existence of MAI
Verdu showed that “ It is the thermal noise and not the MAI that rules the ultimate performance levels attainable in a CDMA system”
Is it possible to exploit the particular structure of the MAI ? : YES !
Note Conventional detector (output of a bank of matched
filter) provides a minimal sufficient statistics for detection

6
Definition
Code and timing information of multiple users are jointly used to better detect each individual user
Important assumption The codes and timing
information of the multiple users are known to the receiver a priori

7
Synchronous system model (1/2)
Baseband received signal
Output of the kth user’s correlator
1
( ) ( ) ( ) ( ) ( )K
k k kk
r t A t g t b t n t
,1
,
1( ) ( )
1 ( ) ( )
1( ) ( )
b
b
b
T
k kb
K T
k k i k i i ki bi k
k k k k
T
i k i kb
y r t g t dtT
A b Ab n t g t dtT
A b MAI z
g t g t dtT

8
Synchronous system model (2/2)
Three user synchronous system : Matrix-vector system model
1 1 1 2,1 2 2 3,1 3 3 1
2 1,2 1 1 2 2 3,2 3 3 2
3 1,3 1 1 2,3 2 2 3 3 3
y Ab A b A b z
y Ab A b A b z
y Ab A b A b z
1 1 12,1 3,1 1
2 1,2 3,2 2 2 2
1,3 2,3 33 3 3
1 0 0
1 0 0
1 0 0
y b zA
y A b z
Ay b z
y RAb z
R I Q
y Ab QAb z

9
Asynchronous system model
Baseband received signal
1
( ) ( ) ( ) ( ) ( )K
k k k k kk
r t A t g t b t n t
2,1
1,2 3,2
2,3 4,3
3,4 5,4
4,5 6,5
5,6
1 0 0 0 0
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
0 0 0 0 1
R

10
Basic algorithms Optimal multiuser detector
Maximum likelihood sequence detector (’86, Verdu)
Sub-optimal multiuser detectors Linear multiuser detectors Subtractive interference cancellation
detectors
Trade-off between complexity and performance

11
Optimal multiuser detector Solution to the ML problem
Combinatorial quadratic minimization : NP-hard problem Only the exhaustive search will guarantee the global mini
mum
{ 1,1}
1
2
1
{ 1,1}
{ 1,1}
ˆ arg max ( | )
( ) ( )( | ) exp( )
2ˆ arg min ( ) ( )
arg min 2Re{ }
K
K
K
MLb
H
o
HML
b
T T
b
b p y b
y Rb R y Rbp y b K
b y Rb R y Rb
b Rb b y
12
Linear multiuser detector
Basic principle Apply a linear mapping, L, to the soft output
of the conventional detector to reduce the MAI seen by each user
Decorrelating detector MMSE detector

13
Decorrelating detector
Applies the inverse of the correlation matrix
Soft estimate of the detector
All the MAI has been removed at the expense of noise enhancement
1
1
( 2Re{ })2 2 0
T T
T
dec dec
dec
b Rb b yRb y
b
Rb y b R y
L R
1 1dec decb R y Ab R z Ab z

14
MMSE detector
Take into account the background noise and utilizes knowledge of the received signal
Linear mapping which minimizes the cost function
Soft estimate of the MMSE detctor2 2( ) [| | ] [| | ]MMSEJ L E b b E Ly b
2 10[ ( / 2) ]MMSEL R N A
MMSE MMSEb L y

15
Subtractive interference cancellation
Basic principle The creation at the receiver of separate
estimates of the MAI contributed by each user
Successive interference cancellation (SIC) Parallel interference cancellation (PIC)

16
SIC
Implementation difficulties
One additional bit delay is required per stage of cancellation
There is a need to re-order the signals whenever the power profile changes
Takes serial approach to canceling interference

17
PIC
Estimate and subtracts out all of the MAI for each user in parallel
18
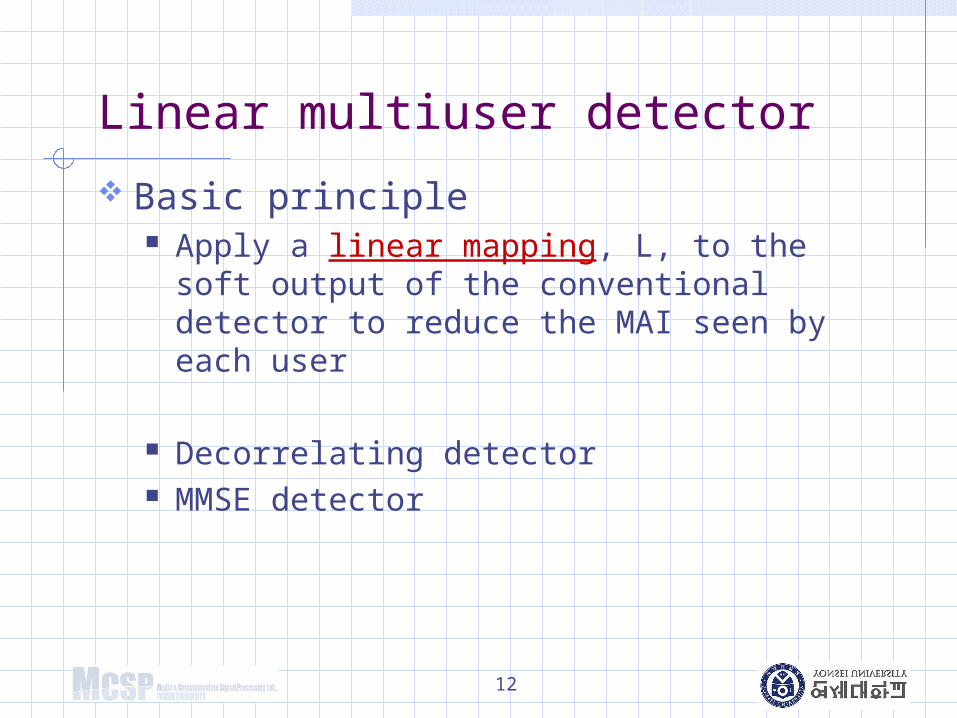
Performance comparison of SIC and PIC
Comparison
Major disadvantage of nonlinear detectors Dependence on reliable estimates of the
received amplitudes
PIC SIC
AdvantagesIn a well power- controlled environments
In fading environments
Disadvantages
Requires more hardware
Problem of power reordering,Large delay

19
Performance analysis (1/2)(With perfect power control)

20
Performance analysis (2/2)(Flat Rayleigh fading with channel est.)

21
Space-time MUD (1/7)
Problem of MUD in multipath CDMA channels with receiver antenna array

22
Space-time MUD (2/7)
Signal model1
0
1
0
1
,1 ,
1
[1] ( ) ( ) ( ), 1, ,
[2] ( ) ( ) ( ), 0
[3] ( ) ( )
[4] [ ]
[5] ( ) ( ) ( ) ( )
( )
M
k k k ki
N
k k cj
L
k kl kl kll
Tkl kl kl P
K
k kk
k k kll
x t A b i s t iT k K
s t c j t jT t T
h t a g t
a a a
r t x t h t n t
A b i a
1
0 1 1
1
( ) ( )
[6] ( ) [ ( ) ( )]
M K L
kl k kli k
TP
g s t iT n t
n t n t n t

23
Space-time MUD (3/7)
Sufficient statistic Summarizes the useful information that a
measurement brings about a parameter Find that for demodulating the multiuser
symbols from the space-time signal
Define the following,1
0 1 1
1
( ; ) ( ) ( )
( ) [ ( ) ( )] , [ (0) ( 1) ]
M K L
k k kl kl k kli k l
T T T TK
S t b A b i a g s t iT
b i b i b i b b b M
24
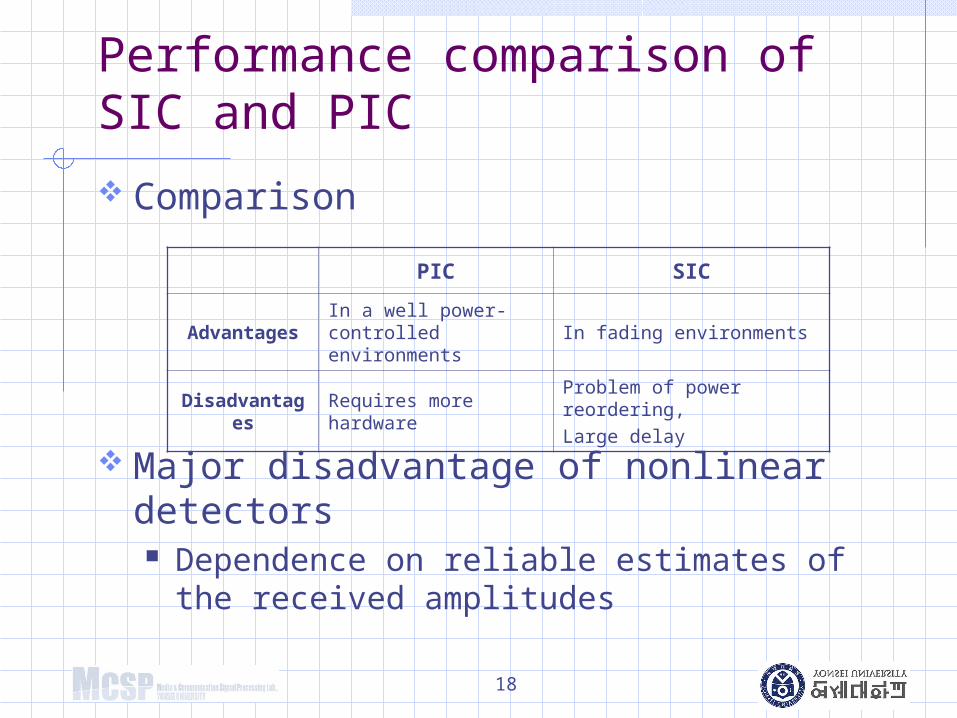
Space-time MUD (4/7) Likelihood function of the received
waveform conditioned on all the transmitted symbols of all users b
1
0 1
( )
*
1( )
( ; ) ( ) ( )
( ) ( )
k
kl
M KH
k ki k
y i
LH
kl kl k kll
z i
S t b r t dt A b i
g a r t s t iT dt
2
2
({ ( ) : } | ) exp[ ( ) / ]
( ) 2Re{ ( ; ) ( ) } | ( ; ) |H
l r t t b C b
b S t b r t dt S t b dt

25
Space-time MUD (5/7)
Sufficient statistic for detecting the multiuser symbol b : How to obtain ?
Passing the received signal through (KL) beamformers directed to each path of each user’s signal, followed by a bank of K maximum-ratio multipath combiners (i.e. RAKE receiver)
Sufficient statistic = Output of space-time matched filter Beamformer is a spatial matched filter RAKE receiver is a temporal matched filter
{ ( ) :1 ,0 1}ky i k K i M

26
Space-time MUD (6/7)(Receiver structure)

27
Space-time MUD (7/7)
Simulation environments 2 users, 2 multipath/user PG=128, 8 array elements array, SNR=-
20dB
28
Current research issues (1/2)
Choice for a practical MUD algorithm Complexity Performance

29
Current research issues (2/2) System design choices
If MUD is to be part of the next standard, some minimum performance requirements have to be specified
MUD research is still in in a phase that would not justify making it a mandatory feature for wideband CDMA standards
Even though MUD is a receiver technique, it might have an impact on the system design because of its large complexity, while a proper system design might ease the implementation of the MUD

30
Proposals Subspace-based blind adaptive detector with
lower computational complexity, robustness against signature waveform mismatch, non-Gaussian noise, impulsive noise
Blind receiver for multiuser detection in unknown correlated noise
Dual mode multiuser detector that dynamically switches its detection mode between matched-filter and decorrelator operations based on the channel characteristics

31
Conclusion Current wireless communication environments
require considerable signal-processing ‘intelligence’
Two categories of many advanced signal processing techniques are multiuser detection and space-time processing
Combined multiuser detection and array processing methods can ‘substantially’ outperform the conventional detector


![[전문가 발표] DRC참가기 & 로봇 정신 (한재권 박사)](https://img.dokumen.tips/doc/110x75/55d131eebb61ebc35f8b4700/-drc-.jpg)













![[전문가 발표] 하지 외골격 로봇 (김완수 박사)](https://img.dokumen.tips/doc/110x75/55d131aebb61ebd75f8b46d0/-55d131aebb61ebd75f8b46d0.jpg)