Embed Size (px)
Citation preview

1
Bezier Curves and Surfaces
© Jeff Parker, Nov 2011

Outline
We often wish to generate curves and surfaces
To create objects
To create movement
e.g. Genesis Project
To provide transitions
We will look at a number of ways to generate curves
We will focus on various parametric cubics

ReviewWe often wish to generate curves and surfaces
There are a number of (conflicting) goals
Interpolate (include) a set of arbitrary points
Easy and efficient to compute
Smooth
Local Control
Easy to deal with
We may need to compute derivatives
It is hard to get all of these
We will discuss ways to achieve some of these

4
HistoryThe Bezier curves and surfaces were developed twice:
Pierre Bézier, at Renault
Paul de Casteljau, at Citroën
Used to bend sheet metal or wood to achieve a smooth shape

Background: Interpolation
Given a set of n points (xi, yi) we may be able to define a polynomial that goes through each point.
Solution: Lagrange Polynomial
Assumes no two points with the same x but different y
Thus cannot draw circle
Interpolate set of arbitrary points
Easy and efficient to compute
Smooth
Local Control

6
Runge Phenomena
Try to approximate the red curve with polynomials
Interpolate (hit curve) at evenly spaced x values

Runge Phenomena
Interpolate at evenly spaced pointsDifficult to get local control with high order polynomials
Interpolate set of arbitrary points
Easy and efficient to compute
Smooth
Local Control

Runge Phenomena
To avoid this
We don't always interpolate
We break curve into small polynomial pieces
Interpolate set of arbitrary points
Easy and efficient to compute
Smooth
Local Control

9
Terminology
Interpolation vs. Approximation

Functions
Three main ways to define a curve
Function: y = x3 + 3x
A function must be single valued
Cannot draw vertical line or circles with function
Implicit function: x2 + y2 + xy= 25
In general case, can't find all points that satisfy
Parametric Function: (x, y) = (5 cos(t), 5 sin(t))
What we will use tonight
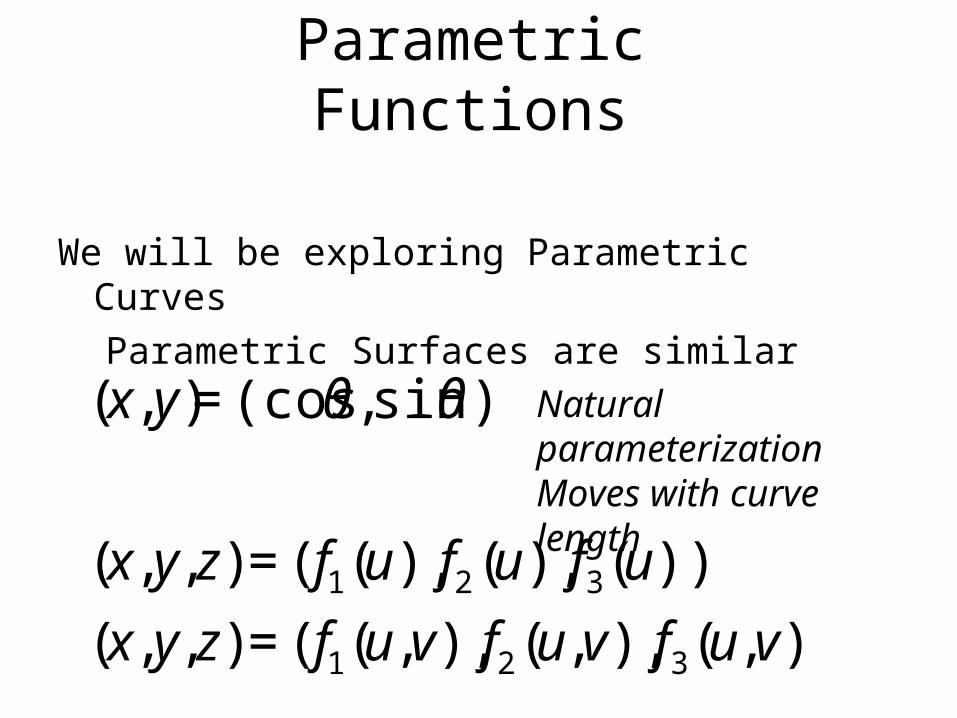
Parametric Functions
We will be exploring Parametric Curves
Parametric Surfaces are similar
€
(x, y)= (cosθ ,sinθ )
(x, y, z) = ( f1(u), f2 (u), f3(u))
(x, y, z) = ( f1(u,v), f2(u,v), f3(u,v))
Natural parameterizationMoves with curve length

Sample Surface
Parametric map the unit square to the sphere
€
(x, y, z) = ( f1(u,v), f2(u,v), f3(u,v))
x(θ ,ϕ ) = r cosθ sinϕ
y(θ ,ϕ ) = r sinθ sinϕ
z(θ ,ϕ ) = r cosϕ

Linear Bezier Curve
We wrote line segments as weighted sum of endpoints
This is the convex sum of the two end points
The curves below are defined on [0..1], sum to 1
Blending Functions

Linear Bezier Curve
In the expression, the terms p0 and p1 are vectors, and their weighted sum is a vector
This is a powerful technique, and we will use it all night
Blending Functions

Piece these together
Piece together a curve that connects a set of points
p1
p2
p3
p4
p0

Piece these together
Piece together a curve that connects a set of points
p1
p2
p3
p4
p0

Piece these together
Create series of equations
p1
p2
p0
p3
p4p1
p2
p3
p4
€
(x, y) =
0 ≤ t <1, (1− t)p0 + tp1
1≤ t < 2, (2 − t)p1 +(t −1)p2
2 ≤ t < 3, (3− t)p1 +(t − 2)p2
3 ≤ t < 4, (4 − t)p1 +(t − 3)p2
4 ≤ t < 5, (5 − t)p1 +(t − 4)p2
⎧
⎨
⎪ ⎪ ⎪
⎩
⎪ ⎪ ⎪
⎫
⎬
⎪ ⎪ ⎪
⎭
⎪ ⎪ ⎪
p0
Blending Functions

Piece these together
Create series of equations
p1
p2
p0
p3
p4p1
p2
p3
p4
p0
Interpolate set of arbitrary points
Easy and efficient to compute
Smooth
Local ControlBlending Functions

Piece these together
Create series of equations
p1
p2
p0
p3
p4p1
p2
p3
p4
p0
T Interpolate set of arbitrary points
T Easy and efficient to compute
F Smooth – Nope - sharp "corners"
T Local ControlBlending Functions

Piece these together
Create series of equations
p1
p2
p0
p3
p4p1
p2
p3
p4
p0
What do we want from the blending functions?
Active Blending Functions should sum to 1
Nice to have all non-negative termsBlending Functions

Terminology
Not continuous at break
Not differentiable at corner
Next: C(1) vs G(1)

Geometric Continuity

23
Cubics
We will focus on Cubic curves
That is, curves with cubic blending functions
Reasons
These allow C(1) and even C(2) continuity
Allow minimum-curvature interpolants to a set of points
Can define position and curvature at two ends
Cubic Polynomials are in the sweet spot:
Smooth, and easy to compute
Implemented with 4x4 matrices, just like rest of OpenGL

24
Bezier Animation
http://zonalandeducation.com/mmts/curveFitting/bezierCurves/bca2/Bezier1Animation2.html

25
Note rate of movement

26
Bezier Curve
We will look at Bezier Curves in some detail tonight
There are different ways to think about them:
All paths lead to the same curves
De Castlejau Algorithm (recursive subdivision)
Bernstein Polynomials
Matrix Form
Cubic equations
All have their uses, and you will see all in practice
27
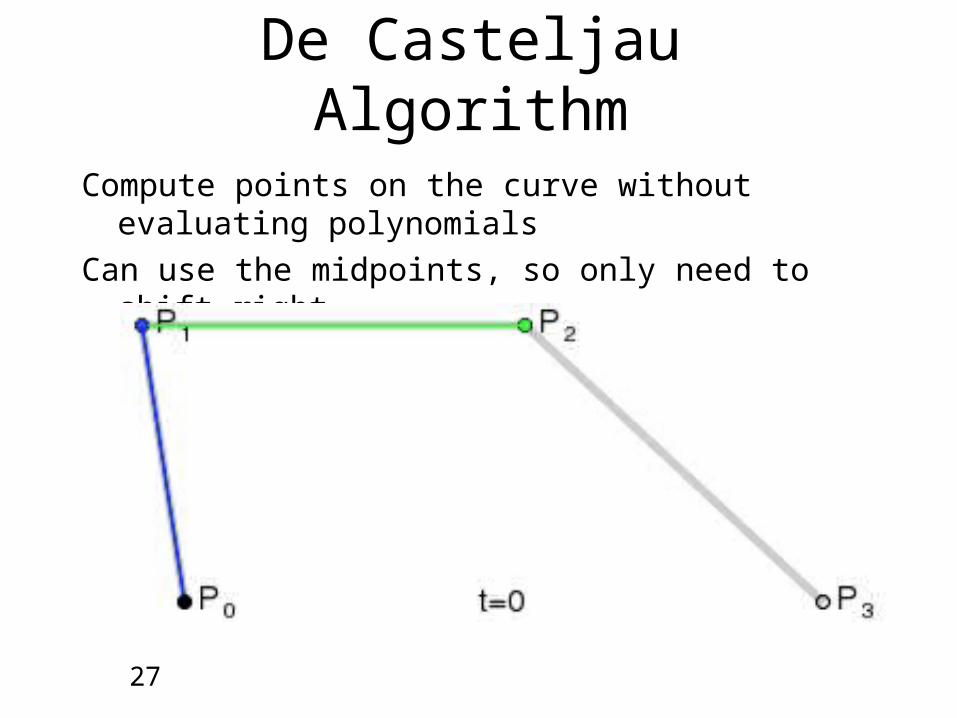
De Casteljau Algorithm
Compute points on the curve without evaluating polynomials
Can use the midpoints, so only need to shift right
28
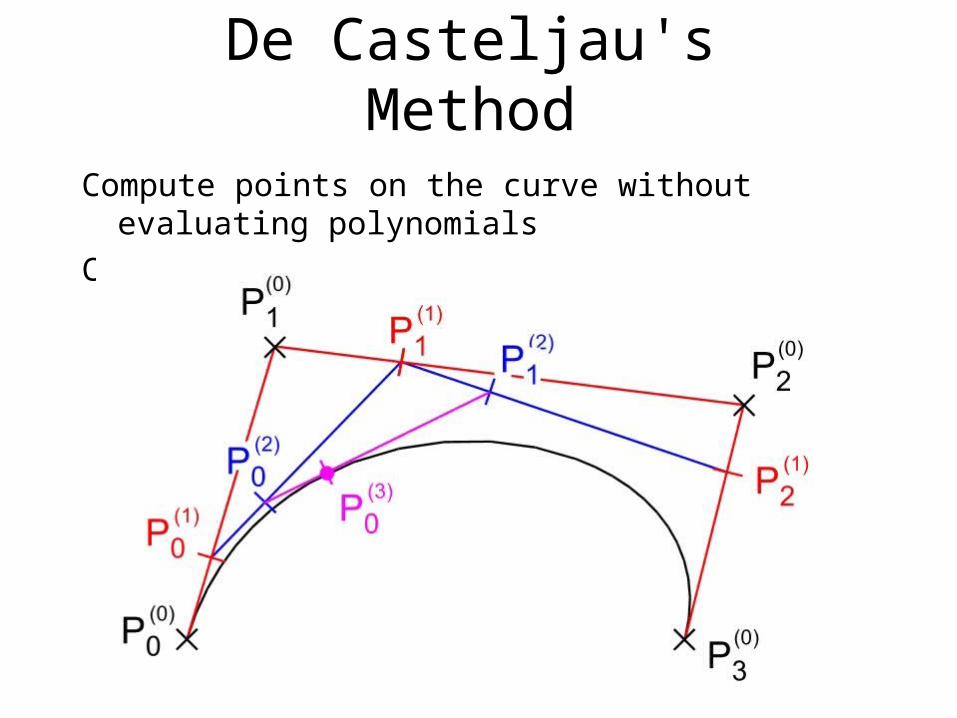
De Casteljau's Method
Compute points on the curve without evaluating polynomials
Can use the midpoints, so only need to shift right

29
De Casteljau's Method
Gives simple recursive method to draw curve
Keep dividing until each subpiece of the curve is almost straight

30
Recursive Drawing Algorithm
We take original four control points
Recursively subdivide, just using adds and shifts
Get two Beziers, with 7 control points
Curve lies inside the convex hull of control points
Continue until the convex hull is one pixel wide
At each step, subcurves
are shorter
are much less wide
Can make this formal

31
Terminology
The Bezier interpolates the first and fourth control point
That is, the curve passes through them
The middle two control points draw the curve towards them

De Casteljau
Let's spell out what this means
Notation differs from figure
€
r0 = (1−u)p0 +u p1
r1 = (1−u)p1 +u p2
r2 = (1−u)p2 +u p3
s0 = (1−u)r0 +ur1s1 = (1−u)r1 +ur2
t0 = (1−u)s0 +us1
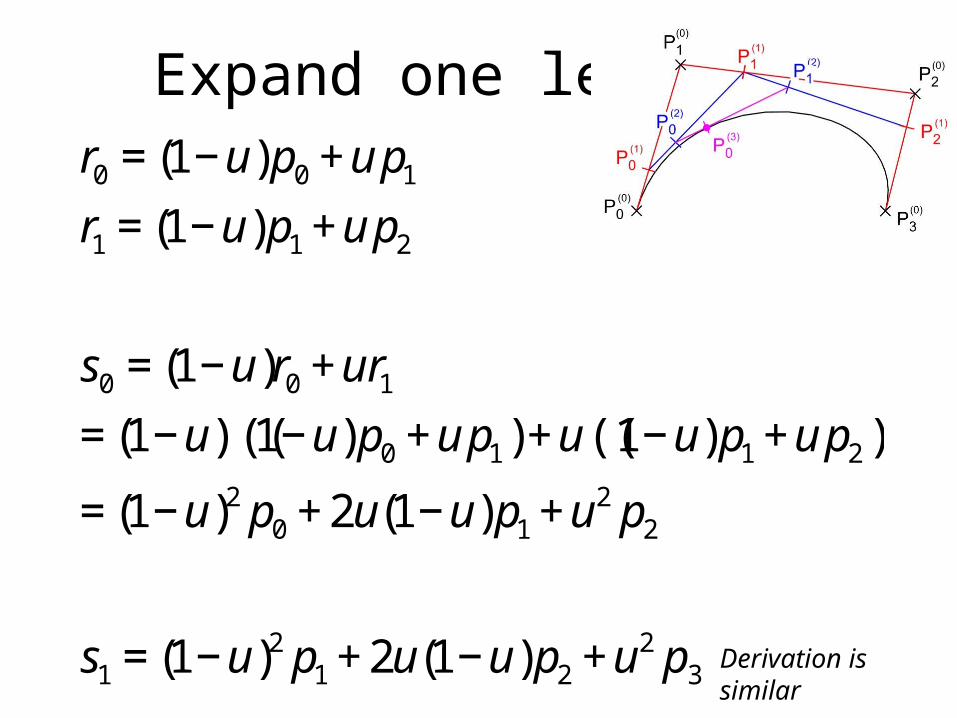
Expand one level
€
r0 = (1−u)p0 +u p1
r1 = (1−u)p1 +u p2
s0 = (1−u)r0 +ur1= (1−u)((1−u)p0 +u p1)+u ((1−u)p1 +u p2 )
= (1−u)2 p0 + 2u(1−u)p1 +u2 p2
s1 = (1−u)2 p1 + 2u(1−u)p2 +u2 p3Derivation is similar

Find third level
€
s0 = (1−u)2 p0 + 2u(1−u)p1 +u2 p2
s1 = (1−u)2 p1 + 2u(1−u)p2 +u2 p3
t0 = (1−u)s0 +us1
= (1−u)3 p0 + 3u(1−u)2 p1 + 3u2(1−u)p2 +u3 p3

35
Bezier Curve
There are different ways to think about them:
De Castlejau Algorithm (recursive subdivision)
Bernstein Polynomials
Matrix Form
Cubic equations
All have their uses, and you will see all in practice

36
Bernstein Polynomials
We write a Bezier as the weighted sum of control points
The control points are multiplied by Bernstein polynomials
Convex sum of polynomials with values in [0..1] that sum to 1
Each polynomial pulls curve towards it's control point

What does it mean?We use these blending functions to decide the amount of
contribution from each control point.
Note that the terms add up to one

38 E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012
Why Polynomials?
Easy to evaluate
Continuous and differentiable everywhere
Must worry about continuity at join points including continuity of derivatives
p(u)
q(u)
join point p(1) = q(0)but p’(1) q’(0)
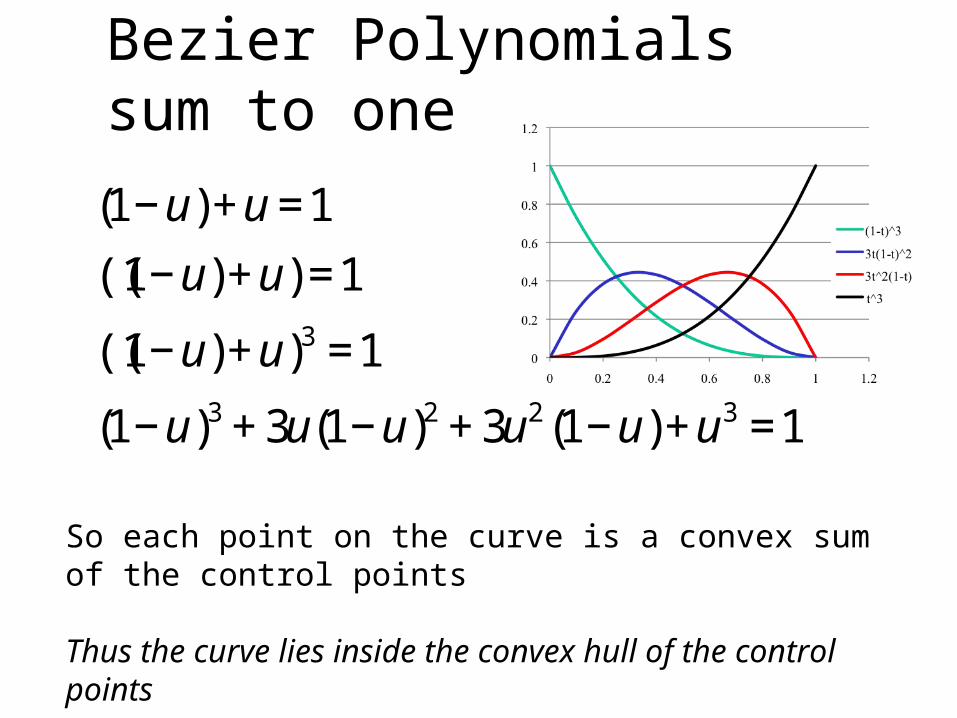
Bezier Polynomials sum to one
€
(1−u)+u =1
((1−u)+u) =1
((1−u)+u)3 =1
(1−u)3 + 3u(1−u)2 + 3u2 (1−u)+u3 =1
So each point on the curve is a convex sum of the control points
Thus the curve lies inside the convex hull of the control points

40
Convex Hull
Check that the curve remains inside the convex hull of the control points in our examples
Also obvious from De Casteljau's Algorithm

41
Bezier Curve
All paths lead to the same point
De Castlejau Algorithm (recursive subdivision)
Bernstein Polynomials
Matrix Form
Cubic equations
All have their uses, and you will see all in practice
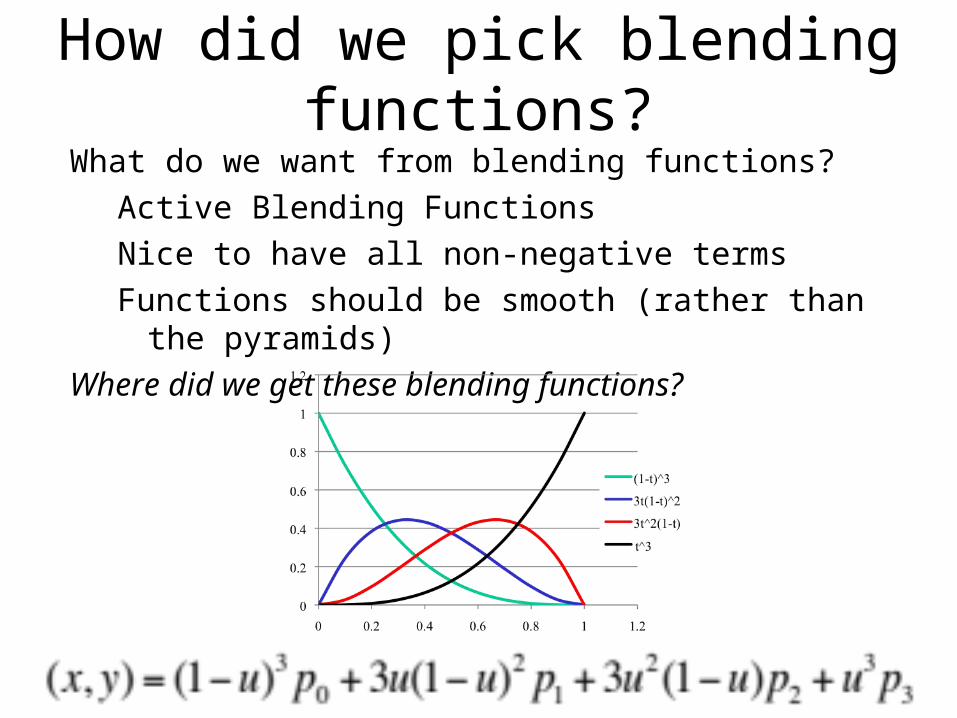
How did we pick blending functions?What do we want from blending functions?
Active Blending Functions
Nice to have all non-negative terms
Functions should be smooth (rather than the pyramids)
Where did we get these blending functions?
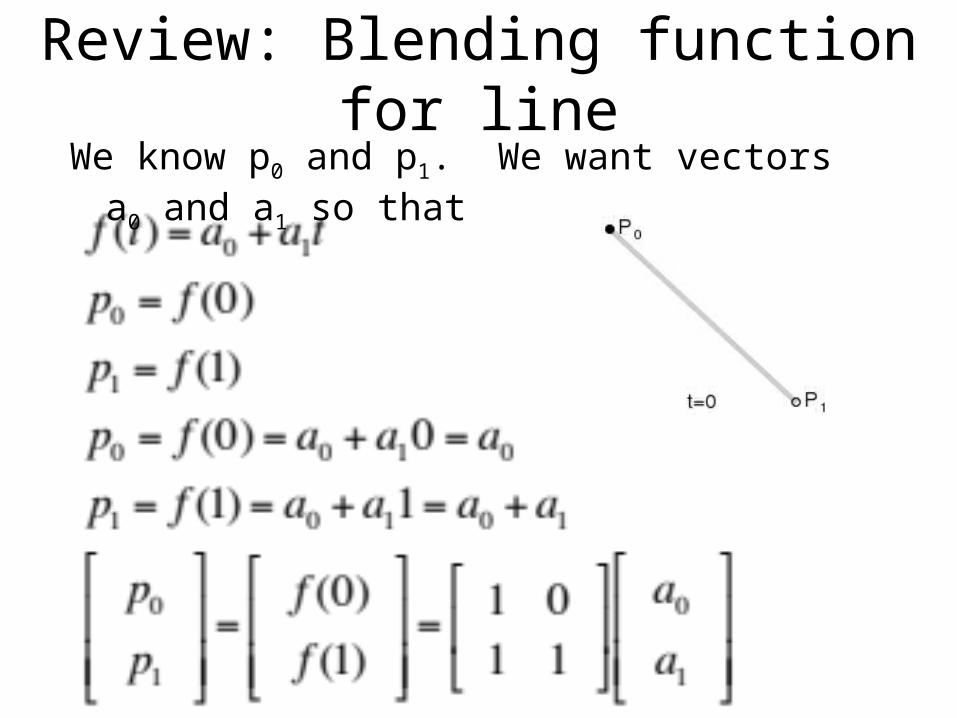
Review: Blending function for lineWe know p0 and p1. We want vectors a0 and a1 so that

Blending function for the lineWe could solve this by hand: a0 = p0, etc.
But let's evolve a general method
Both p and a are vectors

We know p, wish to find aTo solve for p, can invert the Constraint Matrix, C
to find the Blending Matrix, B
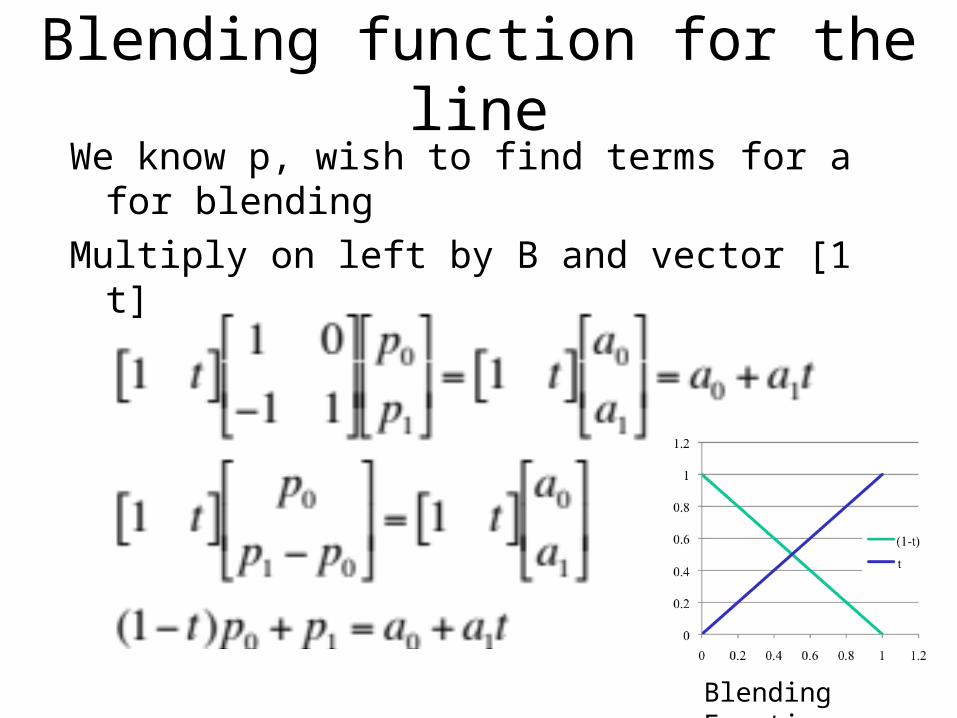
Blending function for the lineWe know p, wish to find terms for a for blending
Multiply on left by B and vector [1 t]
Blending Functions

Blending functions for BezierKnow p0, p1, p2, and p3, want vectors a0, a1, a2, and a3
so that our curve has the form
What do we know?
We know that f(t) interpolates p0 and p3 at t=0 and t=1

Constraint Matrix for BezierWe also know that the slope at the ends is 3(p1-p0)
Compute slope:
Evaluate at t=0 and t=1
€
f '(t) = a1 + 2a2t + 3a3t2
f '(0) = a1
f '(1) = a1 + 2a2 + 3a3

Constraint Matrix for BezierNow we have a constraint matrix C: find it’s inverse B
€
BC =
1 0 0 0
−3 3 0 0
3 −6 3 0
−1 3 −3 1
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥
1 0 0 0
11
30 0
12
3
1
30
1 1 1 1
⎡
⎣
⎢ ⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥ ⎥
=
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥

Apply Constraint MatrixApply the vector [1 u u2 u3] to matrix B
€
Bp = a
1 u u2 u3[ ]
1 0 0 0
−3 3 0 0
3 −6 3 0
−1 3 −3 1
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥
p0
p1
p2
p3
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥
= 1 u u2 u3[ ]
a0
a1
a2
a3
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥
(1−u)3 3u(u −1)2 3u2(u −1) u3[ ]
p0
p1
p2
p3
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥
= a0 + a1u + a2u2 + a3u
3
(1−u)3 p0 + 3u(1−u)2 p1 + 3u2(1−u)p2 +u3 p3 = a0 + a1u + a2u2 + a3u
3
51
Bezier Curve
All paths lead to the same point
De Castlejau Algorithm (recursive subdivision)
Bernstein Polynomials
Matrix Form
Cubic equations
All have their uses, and you will see all in practice

Derive the values ai
Another way to look at this:
€
1 u u2 u3[ ]
1 0 0 0
−3 3 0 0
3 −6 3 0
−1 3 −3 1
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥
p0
p1
p2
p3
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥
= 1 u u2 u3[ ]
a0
a1
a2
a3
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥
1 u u2 u3[ ]
p0
3(p1 − p0 )
3( p0 − 2 p1 − p2 )
p3 − 3p2 + 3p1 − p0
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥
= a0 +ua1 +u2a2 +u3a3
p0 + 3u(p1 − p0 )+ 3u2( p0 − 2 p1 − p2 )+u3( p3 − 3p2 + 3p1 − p0 )

53 E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012
NURBS
Nonuniform Rational B-Spline curves and surfaces add a fourth variable w to x,y,z
Can interpret as weight to give more importance to some control data
Can also interpret as moving to homogeneous coordinate
Requires a perspective division
NURBS act correctly for perspective viewing
Quadrics are a special case of NURBS

NURBS
Non-Uniform Rational B-Splines
Note that Rational is usually a restriction
Rational numbers vs all real numbers.
Here it is an extension: Projective Geometry
Example: we wish to draw a unit circle
No exact match with Cubic Beziers – can get close
However, if we use projective space…
€
(0,1,1), (1,0,0), (0,−1,1)

€
p0 = (0,1,1), p1 = (1,0,0), p2 = (0,−1,1)
(x, y, z) = (0,1,1)(1−u)2 + 2(1,0,0)u(1−u)+ (0,−1,1)u2
(x, y, z) = (2u(1−u), (1−u)2 −u2, (1−u)2 +u2 )
North and south pole and point at (Eastern) infinity
We only need a quadratic Bezier for 3 points
Quadratic Bezier

€
(x, y, z) = (2u(1−u), (1−u)2 −u2, (1−u)2 +u2 )
(x, y, z) =2u(1−u)
(1−u)2 +u2,(1−u)2 −u2
(1−u)2 +u2,1
⎛
⎝ ⎜
⎞
⎠ ⎟
x2 + y2 =(2u(1−u))2 +((1−u)2 −u2 )2
(1−u)2 +u2[ ]
2
=4u2 (1−u)2 +(1−u)4 − 2u2 (1−u)2 +u4
(1−u)2 +u2[ ]
2
=(1−u)4 + 2u2 (1−u)2 +u4
(1−u)2 +u2[ ]
2 =1
But are these points on the unit circle?
x
y

€
(x, y, z) = (0,1,1)(1−u)2 + 2(1,0,0)u(1−u)+ (0,−1,1)u2
=[(1−u)+u][(0,1,1)(1−u)2 + 2(1,0,0)u(1−u)+ (0,−1,1)u2 ]
= (0,1,1)(1−u)3 +(0,1,1)u(1−u)2 +
2(1,0,0)u(1−u)2 + 2(1,0,0)u2 (1−u)+
(0,−1,1)u2(1−u)+ (0,−1,1)u3
= (0,1,1)(1−u)3 +u(1−u)2[(0,1,1)+ 2(1,0,0)]+
u2(1−u)[2(1,0,0)+ (0,−1,1)]+ (0,−1,1)u3
= (0,1,1)(1−u)3 +(2,1,1)u(1−u)2 +(2,−1,1)u2 (1−u)+ (0,−1,1)u3
= (0,1,1)(1−u)3 + 3(2
3,1
3,1
3)u(1−u)2 + 3(
2
3,−1
3,1
3)u2 (1−u)+ (0,−1,1)u3
The control points are weightedThis gives NURBS more degrees of freedom
Degree Elevation
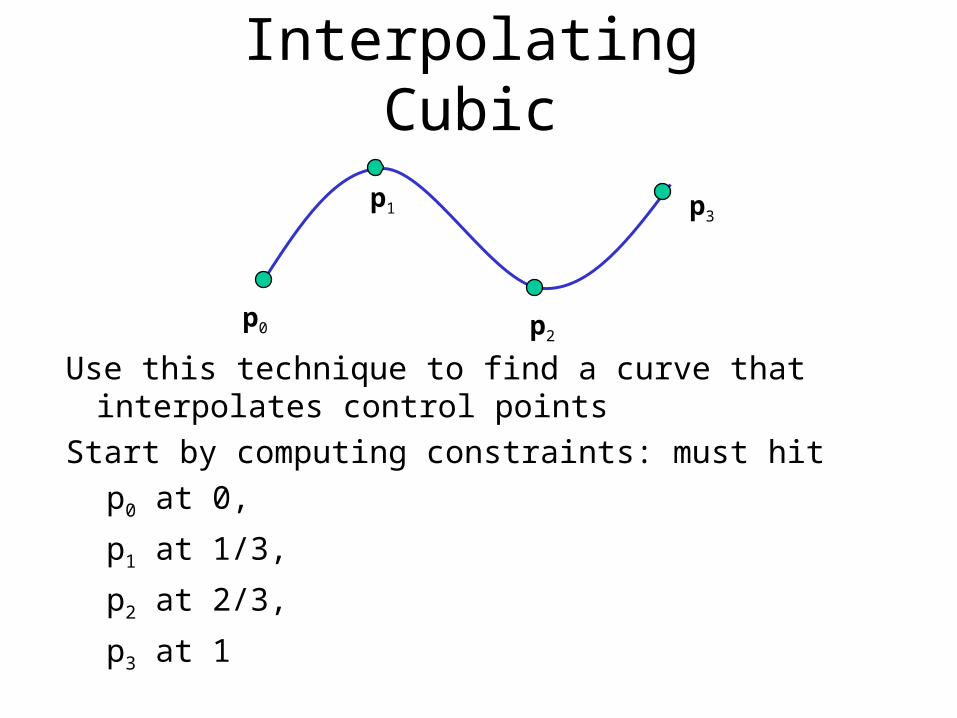
Interpolating Cubic
Use this technique to find a curve that interpolates control points
Start by computing constraints: must hit
p0 at 0,
p1 at 1/3,
p2 at 2/3,
p3 at 1
p0
p1
p2
p3

Interpolating Cubic
Use this technique to find a curve that interpolates control points
Start by computing constraints: must hit
p0 at 0,
p1 at 1/3,
p2 at 2/3,
p3 at 1
p0
p1
p2
p3
€
C =
1 0 0 0
1 1/ 3 1/9 1/27
1 2 / 3 4 /9 8 /27
1 1 1 1
⎡
⎣
⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥

60 E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012
Interpolation MatrixSolving for c we find the interpolation matrix
5.45.135.135.4
5.4185.229
15.495.5
0001
1
AMI
c=MIp
Note that MI does not depend on input data and
can be used for each segment in x, y, and z

61 E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012
Interpolating Multiple Segments
use p = [p0 p1 p2 p3]T use p = [p3 p4 p5 p6]T
Get continuity at join points but notcontinuity of derivatives

62 E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012
Blending FunctionsRewriting the equation for p(u)
p(u)=uTc=uTMIp = b(u)Tp
where b(u) = [b0(u) b1(u) b2(u) b3(u)]T isan array of blending polynomials such thatp(u) = b0(u)p0+ b1(u)p1+ b2(u)p2+ b3(u)p3
b0(u) = -4.5(u-1/3)(u-2/3)(u-1)b1(u) = 13.5u (u-2/3)(u-1)b2(u) = -13.5u (u-1/3)(u-1)b3(u) = 4.5u (u-1/3)(u-2/3)

63 E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-
Wesley 2012
Lagrange Blending FunctionsThese functions are not smooth
Hence the interpolation polynomial is not smooth
Are not limited to [0, 1] – thus not convex

64
Catmull-Rom
We can get a similar effect with Bezier curves
One way of auto-generating the right slopes to a set of interpolated points was introduced by Catmull and Rom
Idea is to use slope between previous and next point as the slope at the current point.
If distance between points is uneven, can overshoot

Cubic Hermite Spline
Sometimes we want to avoid sharp corners
Can define the slope at the endpoints
Hermite Polynomials use a new blending functions to define curve
p(0) p(1)
p’(0) p’(1)

Hermite Polynomial

Hermite Polynomial

68 E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012
AnalysisBezier form has advantages over interpolating form,
derivatives need note be continuous at join points
Can we do better?
Go to higher order Bezier
More work
Derivative continuity still only approximate
Supported by OpenGL
Apply different conditions
Tricky without letting order increase
69
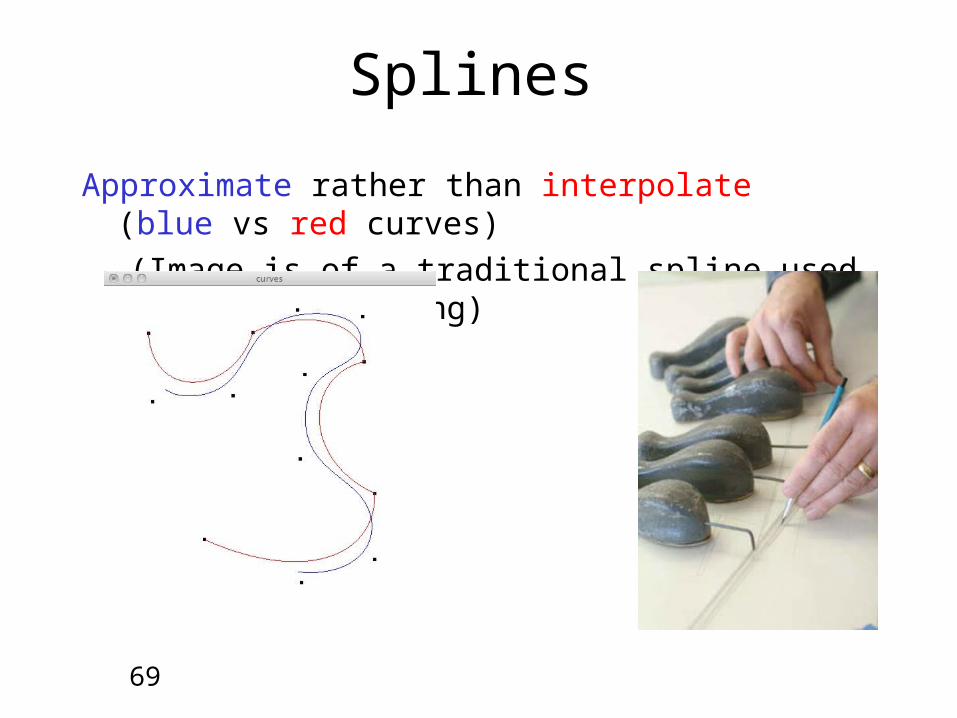
Splines
Approximate rather than interpolate (blue vs red curves)
(Image is of a traditional spline used in boat building)

70E. Angel and D. Shreiner: Interactive Computer
Graphics 6E © Addison-Wesley 2012
B-Splines
Basis splines: use the data at p=[pi-2 pi-1 pi pi-1]T to define curve only between pi-1 and pi
We can apply more continuity conditions to each segment
For cubics, we can have continuity of function, first and second derivatives at join points - C(2)
Cost is 3 times as much work for curves
Add one new point each time rather than three
For surfaces, we do 9 times as much work

71
Cubic B-spline
1331
0363
0303
0141
MS
p(u) = uTMSp = b(u)Tp
E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012

72
Blending Functions
u
uuuuu
u
u
3
22
32
3
3331
364
)1(
6
1)(b
convex hull property
E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012

73
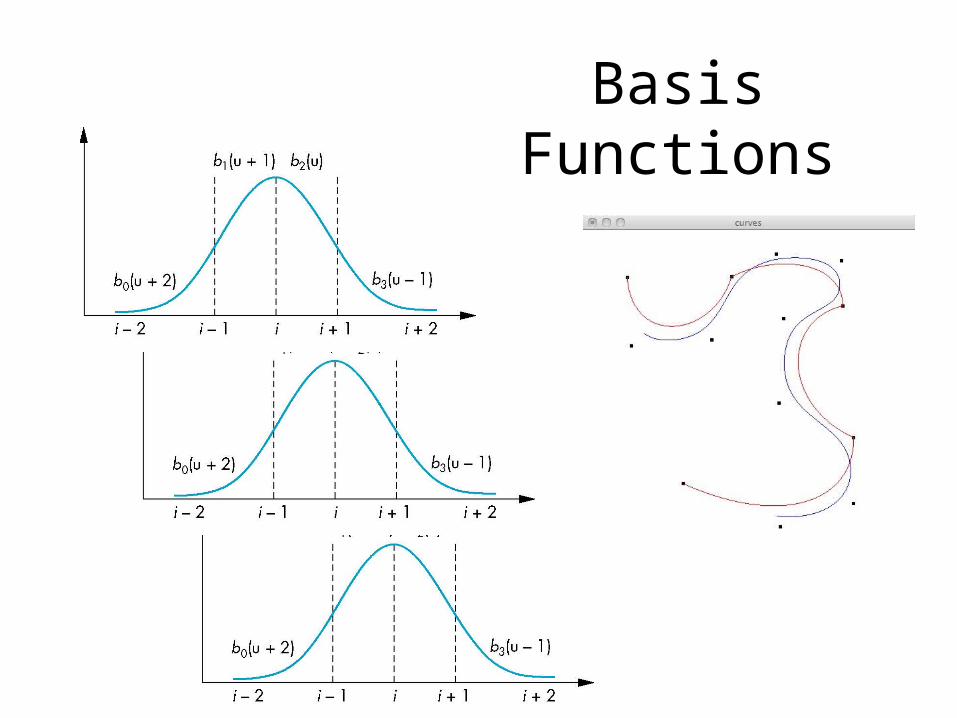
Basis Functions
2
21
11
12
2
0
)1(
)()1(
)2(
0
)(
3
2
1
0
iu
iui
iuiiui
iui
iu
ub
ubub
ub
uBi
In terms of the blending polynomials
E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012
Basis Functions

75 E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-
Wesley 2012
B-Spline Patches
vupvbubvup TSS
Tijj
i ji MPM
)()(),(3
0
3
0
defined over only 1/9 of region
76 E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012
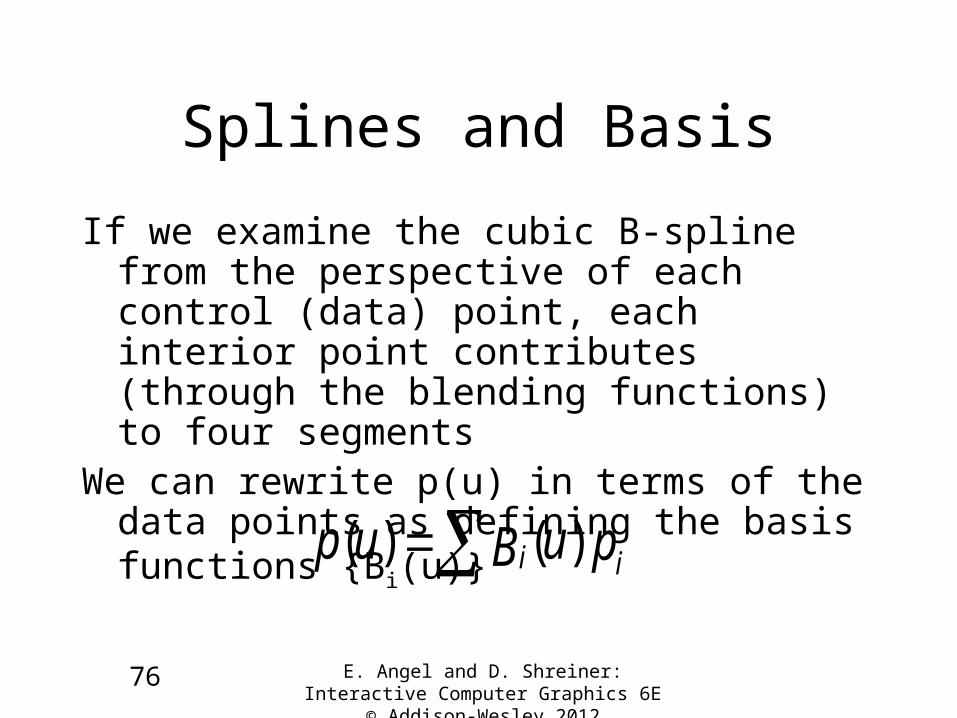
Splines and Basis
If we examine the cubic B-spline from the perspective of each control (data) point, each interior point contributes (through the blending functions) to four segments
We can rewrite p(u) in terms of the data points as defining the basis functions {Bi(u)}
puBup ii )()(

77
Generalizing Splines
We can extend to splines of any degree
Data and conditions do not have to given at equally spaced values (the knots)
Nonuniform and uniform splines
Can have repeated knots
Can force spline to interpolate points
Cox-deBoor recursion gives method of evaluation
E. Angel and D. Shreiner: Interactive Computer Graphics 6E © Addison-Wesley 2012

78
Beziers in OpenGL
We could evaluate Beziers by hand, given the formulas above.
It is simpler to use Evaluators, provided by OpenGL
Evaluators provide a way to use polynomial or rational polynomial mapping to produce vertices, normals, texture coordinates, and colors. The values produced by an evaluator are sent to further stages of GL processing just as if they had been presented using glVertex, glNormal, glTexCoord, and glColor commands, except that the generated values do not update the current normal, texture coordinates, or color.
All polynomial or rational polynomial splines of any degree (up to the maximum degree supported by the GL implementation) can be described using evaluators. These include almost all splines used in computer graphics: B-splines, Bezier curves, Hermite splines, and so on. (From the man page)

Bezier Curve
void drawCurve() {
int i;
GLfloat pts[4][3];
/* Copy the coordinates from balls to array */
for (i = 0; i < 4; i++) {
pts[i][0] = (GLfloat)cp[i]->x;
pts[i][1] = (GLfloat)wh - (GLfloat)cp[i]->y;
pts[i][2] = (GLfloat)0.0;
}
// Define the evaluator
glMap1f(GL_MAP1_VERTEX_3, 0.0, 1.0, 3, 4, &pts[0][0]);
/* type, u_min, u_max, stride, num points, points */
glEnable(GL_MAP1_VERTEX_3);
setLineColor();
glBegin(GL_LINE_STRIP);
for (i = 0; i <= 30; i++)
/* Evaluate the curve when u = i/30 */
glEvalCoord1f((GLfloat) i/ 30.0);
glEnd();

Teapot

bteapot.c
// vertices.h
GLfloat vertices[306][3]={{1.4 , 0.0 , 2.4}, {1.4 , -0.784 , 2.4},
{0.784 , -1.4 , 2.4}, {0.0 , -1.4 , 2.4}, {1.3375 , 0.0 , 2.53125},
{1.3375 , -0.749 , 2.53125}, {0.749 , -1.3375 , 2.53125}, {0.0 , -1.3375 , 2.53125},
{1.4375 , 0.0 , 2.53125}, {1.4375 , -0.805 , 2.53125}, {0.805 , -1.4375 , 2.53125},
...
// patches.h
int indices[32][4][4]={{1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16},
{4, 17, 18, 19, 8, 20, 21, 22, 12, 23, 24, 25, 16, 26, 27, 28},
{19, 29, 30, 31, 22, 32, 33, 34, 25, 35, 36, 37, 28, 38, 39, 40},
...

bteapot.c
/* 32 patches each defined by 16 vertices, arranged in a 4 x 4 array */
/* NOTE: numbering scheme for teapot has vertices labeled from 1 to 306 */
/* remnent of the days of FORTRAN */
#include "patches.h"
void display(void)
{
int i, j, k;
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glColor3f(1.0, 1.0, 1.0);
glLoadIdentity();
glTranslatef(0.0, 0.0, -10.0);
glRotatef(-35.26, 1.0, 0.0, 0.0);
glRotatef(-45.0, 0.0, 1.0, 0.0);
/* data aligned along z axis, rotate to align with y axis */
glRotatef(-90.0, 1.0,0.0, 0.0);

bteapot.c
for(k=0;k<32;k++)
{
glMap2f(GL_MAP2_VERTEX_3, 0, 1, 3, 4, 0, 1, 12, 4, &data[k][0][0][0]);
for (j = 0; j <= 8; j++)
{
glBegin(GL_LINE_STRIP);
for (i = 0; i <= 30; i++)
glEvalCoord2f((GLfloat)i/30.0, (GLfloat)j/8.0);
glEnd();
glBegin(GL_LINE_STRIP);
for (i = 0; i <= 30; i++)
glEvalCoord2f((GLfloat)j/8.0, (GLfloat)i/30.0);
glEnd();
}
}
glFlush();
}

84
Interactive Websites to try
Bill Casselman's Bezier Applet
http://www.math.ubc.ca/people/faculty/cass/gfx/bezier.html
Wikepedia Animation
http://en.wikipedia.org/wiki/Bezier_curve
Edward A. Zobel's Animation
http://id.mind.net/~zona/mmts/curveFitting/bezierCurves/bezierCurve.html
POV-Ray Cyclopedia Tutorial
http://www.spiritone.com/~english/cyclopedia/bezier.html
Andy Salter's Spline Tutorial
http://www.doc.ic.ac.uk/%7Edfg/AndysSplineTutorial/index.html
Evgeny Demidov's Interactive Tutorial
http://ibiblio.org/e-notes/Splines/Intro.htm

85
Summary

86
SummaryWe often wish to generate curves and surfaces
We would like
Interpolate (include) a set of arbitrary points
Easy and efficient to compute
Smooth
Local Control…
By splicing together pieces of curves, we can attain many of these.
Modern hardware and language support these curves
![Curves and Surfacesadair/CG/Notas Aula/Curvas/09-curves.pdf · Bezier Curves and Surfaces [Angel 10.1-10.6] Parametric Representations Cubic Polynomial Forms Hermite Curves Bezier](https://img.dokumen.tips/doc/110x75/5f72f8d58557ce2aea5f374f/curves-and-adaircgnotas-aulacurvas09-curvespdf-bezier-curves-and-surfaces.jpg)