Embed Size (px)
Citation preview
1
© ABB GroupFebruary 21, 2013 | Slide 1
1.
IRC 5
R.S.O
© ABB GroupFebruary 21, 2013 | Slide 2
1.
IRC5
I/O

2
2
2.1.
2.2.
© ABB GroupFebruary 21, 2013 | Slide 3
© ABB GroupFebruary 21, 2013 | Slide 4
2.1.

3
2.1.
E-Stop
( E-Stop )
© ABB GroupFebruary 21, 2013 | Slide 5
© ABB GroupFebruary 21, 2013 | Slide 6
2.1.
<250 mm/s100%

4
2.1.
© ABB GroupFebruary 21, 2013 | Slide 7
2.1.
User’s Guide
© ABB GroupFebruary 21, 2013 | Slide 8
5
© ABB GroupFebruary 21, 2013 | Slide 9
2.2.
© ABB GroupFebruary 21, 2013 | Slide 10© ABB Group
February 21, 2013 | Slide 10

6
3 IRC5
3.1.3.1.1.
3.1.2.
3.1.3.
3.1.4.
3.2.
3.3.
© ABB GroupFebruary 21, 2013 | Slide 11
3.
1.
2.
3.
© ABB GroupFebruary 21, 2013 | Slide 12

7
3.1. IRC5
1. (Dual cabinet)
2. (Single cabinet)
3. (Panel mounted controller)
4. (compact controller)
© ABB GroupFebruary 21, 2013 | Slide 13
3.1.2.
A— /
B—
C—
D—
A— /
© ABB GroupFebruary 21, 2013 | Slide 14

8
3.1.3. IRC5
CM power supply
DM power supply
Main computer
Panel board
Axis computerboard
Drive unit- Manipulator
-
Computer UltraCap
Customer power supply/
I/O Unit
Contactor unit
© ABB GroupFebruary 21, 2013 | Slide 15
3.1.4. IRC5
Operator´s panel
Service portsU S B Customer (I/O)
space
FlexPendant connection
Axis computer board
Panel boardMain computer
Computer UltraCap
Drive unit
Power distributionboard
Power supply
Contactor unit© ABB GroupFebruary 21, 2013 | Slide 16

9
3.2.
© ABB GroupFebruary 21, 2013 | Slide 17
–5 kg to 60 kg
IRB 140IRB 1410 IRB 1600 IRB
1600ID
IRB 2400 IRB 4400
IRB 4450S
IRB 2400L© ABB GroupFebruary 21, 2013 | Slide 18

10
–125 kg to 630 kg
IRB 6640
IRB 7600IRB 6660IRB 6660
IRB 6620
IRB 6650SIRB 6640
© ABB GroupFebruary 21, 2013 | Slide 19
Rectifier
Motor
Resolve
Transformer
Gear
AxisComputer
MainComputer
Serial Measurement Board
Drive unitDrive unit
Drive unit
© ABB GroupFebruary 21, 2013 | Slide 20

11
3.2.
• ( SMB )
•
•
•
© ABB GroupFebruary 21, 2013 | Slide 21
3.3. (FlexPendant/TPU)
© ABB GroupFebruary 21, 2013 | Slide 22

12
3.3.
© ABB GroupFebruary 21, 2013 | Slide 23
3.3.
© ABB GroupFebruary 21, 2013 | Slide 24

13
3.3.
© ABB GroupFebruary 21, 2013 | Slide 25
3.3.
© ABB GroupFebruary 21, 2013 | Slide 26

14
3.3.
:
7.7 inch
640 x 480 pixels
© ABB GroupFebruary 21, 2013 | Slide 27
3.3.
& R.S.O
© ABB GroupFebruary 21, 2013 | Slide 28

15
4
4.1.4.1.1.4.1.2.
4.1.2.14.1.2.24.1.2.3
4.1.3.4.1.4.4.1.5.4.1.6.4.1.7.4.1.8.
4.2.4.3.
4.3.1.4.3.1.14.3.1.2
4.3.2.4.3.2.14.3.2.2
© ABB GroupFebruary 21, 2013 | Slide 29
4.1.
12 ABB
© ABB GroupFebruary 21, 2013 | Slide 30

16
4.1.1.
1
© ABB GroupFebruary 21, 2013 | Slide 31
4.1.1.
2
© ABB GroupFebruary 21, 2013 | Slide 32

17
4.1.2.
12
© ABB GroupFebruary 21, 2013 | Slide 33
4.1.2.1.
Axis 1-3 1-3
Axis 4-6 4-6
© ABB GroupFebruary 21, 2013 | Slide 34

18
4.1.2.1.
© ABB GroupFebruary 21, 2013 | Slide 35
4.1.2.2.
Reorient
TCP
4.1.4
© ABB GroupFebruary 21, 2013 | Slide 36

19
4.1.2.2.
© ABB GroupFebruary 21, 2013 | Slide 37
4.1.2. 3.
LinearTCP
1.
2.
3.
1) tool02) …….
4.
1) wobj02) …….
© ABB GroupFebruary 21, 2013 | Slide 38

20
4.1.2.3.1 —
© ABB GroupFebruary 21, 2013 | Slide 39
4.1.2.3.2 —
© ABB GroupFebruary 21, 2013 | Slide 40

21
4.1.2.3.3 —
© ABB GroupFebruary 21, 2013 | Slide 41
4.1.2.3.4 —
© ABB GroupFebruary 21, 2013 | Slide 42

22
4.1.3.
12 TCP
© ABB GroupFebruary 21, 2013 | Slide 43
4.1.4.
12
© ABB GroupFebruary 21, 2013 | Slide 44

23
4.1.5.
12
© ABB GroupFebruary 21, 2013 | Slide 45
4.1.6.
12
© ABB GroupFebruary 21, 2013 | Slide 46

24
4.1.7.
© ABB GroupFebruary 21, 2013 | Slide 47
4.1.8.
© ABB GroupFebruary 21, 2013 | Slide 48

25
4.2.
© ABB GroupFebruary 21, 2013 | Slide 49
4.2.
© ABB GroupFebruary 21, 2013 | Slide 50

26
4.2.
© ABB GroupFebruary 21, 2013 | Slide 51
4.2.
© ABB GroupFebruary 21, 2013 | Slide 52

27
4.2.
© ABB GroupFebruary 21, 2013 | Slide 53
4.2.
© ABB GroupFebruary 21, 2013 | Slide 54

28
4.2.
© ABB GroupFebruary 21, 2013 | Slide 55
4.2.
© ABB GroupFebruary 21, 2013 | Slide 56

29
4.3.
Base Coordinate System
World Coordinate System
Tool Coordinate System
Work Object Coordinate System
© ABB GroupFebruary 21, 2013 | Slide 57
4.3.
(TCP)
© ABB GroupFebruary 21, 2013 | Slide 58

30
4.3.1.
TCP
TCP1) Reorient
TCP2) Linear
TCP
TCP
TCP
© ABB GroupFebruary 21, 2013 | Slide 59
4.3.1.
TCPTOOL0
TCP
TCPTCP
© ABB GroupFebruary 21, 2013 | Slide 60

31
4.3.1.
tool 0
tPen
© ABB GroupFebruary 21, 2013 | Slide 61
4.3.1.1.
1. N(N>=4) /TCP TCPN
TCP ( tool0 )tool0
2. TCP&Z N ZZ
3. TCP&X,Z N XX ZZ
© ABB GroupFebruary 21, 2013 | Slide 62

32
1 ABB
2
4.3.1.2.
© ABB GroupFebruary 21, 2013 | Slide 63
4.3.1.2.
3 tooldata ,
© ABB GroupFebruary 21, 2013 | Slide 64

33
4.3.1.2.
4 … , tooldata
© ABB GroupFebruary 21, 2013 | Slide 65
4.3.1.2.
5 … , . .
© ABB GroupFebruary 21, 2013 | Slide 66

34
4.3.1.2.
6 tooldata ,
© ABB GroupFebruary 21, 2013 | Slide 67
7 tooldata1)mass kg2)cog: x y z mm
4.3.1.2.
© ABB GroupFebruary 21, 2013 | Slide 68

35
4.3.1.2.
8 tooldata
© ABB GroupFebruary 21, 2013 | Slide 69
4.3.1.2.
9
© ABB GroupFebruary 21, 2013 | Slide 70

36
4.3.1.2.
© ABB GroupFebruary 21, 2013 | Slide 71
10 TCP
11 TCP
4.3.1.2.
© ABB GroupFebruary 21, 2013 | Slide 72

37
4.3.2.
Wobj
Wobj
Wobj
© ABB GroupFebruary 21, 2013 | Slide 73
X1
X2
Y1User
X1
X2
Y1
Object
X
Y
X
Y
4.3.2.1.
• X1 X2 XY1 X Y
© ABB GroupFebruary 21, 2013 | Slide 74

38
4.3.2.2.
1 ABB.
2
3 wobjdata ,
© ABB GroupFebruary 21, 2013 | Slide 75
4 … , wobjdata
4.3.2.2.
© ABB GroupFebruary 21, 2013 | Slide 76

39
4.3.2.2.
5 … , . .
© ABB GroupFebruary 21, 2013 | Slide 77
6
4.3.2.2.
© ABB GroupFebruary 21, 2013 | Slide 78

40
7wobjdata
4.3.2.2.
© ABB GroupFebruary 21, 2013 | Slide 79
8
4.3.2.2.
© ABB GroupFebruary 21, 2013 | Slide 80

41
9 TCP X1
10 9 TCP X2 Y1
4.3.2.2.
X1
X2
Y1
X
Y
© ABB GroupFebruary 21, 2013 | Slide 81
11 wobj1
4.3.2.2.
© ABB GroupFebruary 21, 2013 | Slide 82

42
5
5.1.
5.2.5.2.1.
5.2.2.
5.2.3.
5.2.4.
5.2.5.
5.2.6.
5.2.7.
5.2.8.
5.2.9.
© ABB GroupFebruary 21, 2013 | Slide 83
5.1.
Signal Unit Bus Main Computer
© ABB GroupFebruary 21, 2013 | Slide 84

43
5.1.
• DI• DO• GI 8421• GO 8421• AI• AO
© ABB GroupFebruary 21, 2013 | Slide 85
5.1.
• Cross Connections .•
•
• 40 ,20
• 1024
• 64 Byte 64 Byte
© ABB GroupFebruary 21, 2013 | Slide 86

44
5.1.
• Cross Connections .•
•
• 40 ,20
• 1024
• 64 Byte 64 Byte
© ABB GroupFebruary 21, 2013 | Slide 87
5.1.
• Cross Connections .• Cross Connections 5 Actor•
• 16•
© ABB GroupFebruary 21, 2013 | Slide 88

45
5.2.
•
•
•
•
•
•
•
•
© ABB GroupFebruary 21, 2013 | Slide 89
5.2.1. I/O
1
2
3 Bus
© ABB GroupFebruary 21, 2013 | Slide 90

46
5.2.1. I/O
4
© ABB GroupFebruary 21, 2013 | Slide 91
5.2.1. I/O
5 Type of Bus DeviceNet
© ABB GroupFebruary 21, 2013 | Slide 92

47
5.2.1. I/O
6 Connector ID First Board
7 DeviceNet master address0-63 , DeviceNet
© ABB GroupFebruary 21, 2013 | Slide 93
5.2.1. I/O
8
© ABB GroupFebruary 21, 2013 | Slide 94

48
5.2.2.AD Combi I/O-
Combi I/O DSQC 651 24VDC 8 82
© ABB GroupFebruary 21, 2013 | Slide 95
5.2.2.Digital I/O-
Digital I/O DSQC 652 24VDC 1616

49
5.2.2.Relay I/O-
Relay I/O DSQC 653 24VDC 8 8
© ABB GroupFebruary 21, 2013 | Slide 97
© ABB Group
5.2.2.AD Combi I/O-
Combi I/O DSQC 327A 24VDC 1616 2
© ABB GroupFebruary 21, 2013 | Slide 98

50
5.2.2.Digital I/O-
Digital I/O DSQC 328A 24VDC 1616
© ABB GroupFebruary 21, 2013 | Slide 99
5.2.2.Relay I/O-
Relay I/O DSQC 332A 24VDC 1616
© ABB GroupFebruary 21, 2013 | Slide 100

51
5.2.2.
• Analog I/O DSQC 355A4 4
© ABB GroupFebruary 21, 2013 | Slide 101
5.2.2.Remote I/O
• Remote I/O DSQC 350AAllen Bradley128 128
© ABB GroupFebruary 21, 2013 | Slide 102

52
5.2.2.Interbus-S
• Interbus-S (slave) DSQC 351AInterbus-S
128 128
© ABB GroupFebruary 21, 2013 | Slide 103
5.2.2.Profibus-DP
• Profibus-DP DSQC 352AProfibus-DP
128 128
© ABB GroupFebruary 21, 2013 | Slide 104

53
5.2.2.CCLink
• CCLink DSQC 378ACCLink
© ABB GroupFebruary 21, 2013 | Slide 105
5.2.2.
• Encoder interface unit DSQC 377AConveyer Tracking
© ABB GroupFebruary 21, 2013 | Slide 106

54
5.2.2.Profibus Fieldbus Adapter-DSQC667
• Profibus Fieldbus Adapter-DSQC667RW 5.09.02
DSQC639 64 Byte 64 Byte.
© ABB GroupFebruary 21, 2013 | Slide 107
5.2.2.Ethernet/IP Fieldbus Adapter-DSQC669
• Ethernet/IP Fieldbus Adapter-DSQC669RW 5.10.03
DSQC639 64 Byte 64 Byte.
© ABB GroupFebruary 21, 2013 | Slide 108

55
5.2.2.
X5
© ABB GroupFebruary 21, 2013 | Slide 109
5.2.3. I/O
1
2
3 Unit
© ABB GroupFebruary 21, 2013 | Slide 110

56
5.2.3. I/O
4
© ABB GroupFebruary 21, 2013 | Slide 111
5.2.3. I/O
5 Name16
© ABB GroupFebruary 21, 2013 | Slide 112

57
5.2.3. I/O
6 Type of Unit d652
© ABB GroupFebruary 21, 2013 | Slide 113
5.2.3. I/O
7 Connected to Bus DEV1
© ABB GroupFebruary 21, 2013 | Slide 114

58
5.2.3. I/O
8 DeviceNet Lean Address
9 Trust Level Trust Level
10 Unit startup state
© ABB GroupFebruary 21, 2013 | Slide 115
5.2.3. I/O
11
© ABB GroupFebruary 21, 2013 | Slide 116

59
5.2.4. I/O
1
2
3 Signal
© ABB GroupFebruary 21, 2013 | Slide 117
5.2.4. I/O
4
© ABB GroupFebruary 21, 2013 | Slide 118

60
5.2.4. I/O
5 Name16
© ABB GroupFebruary 21, 2013 | Slide 119
5.2.4. I/O
6 Type of Signal
© ABB GroupFebruary 21, 2013 | Slide 120

61
5.2.4. I/O
7 Assigned to Unit BOARD63
© ABB GroupFebruary 21, 2013 | Slide 121
5.2.4. I/O
8 Unit Mapping
9 Access level Access level
11© ABB GroupFebruary 21, 2013 | Slide 122

62
5.2.4. I/O
DI/
GI
Filter time passive
010 ( ) 32
Filter time active
110 ( ) 32
DO/
GO
Store value at System Failure and Power fail
YESNO 0
Store signal value at Power failYESNO 0
© ABB GroupFebruary 21, 2013 | Slide 123
5.2.5.
•
•
© ABB GroupFebruary 21, 2013 | Slide 124

63
5.2.5.
Motors On
Motors On and Start ( )
Motors Off –
1
Load and Start ( )Argumentflp1:ABB.prg
© ABB GroupFebruary 21, 2013 | Slide 125
5.2.5.
Interrupt ( )Argumentroutine 1
Start ( )
Start at Main ( )
© ABB GroupFebruary 21, 2013 | Slide 126

64
5.2.5.
Stop1
Stop at the end of Cycle
1
Stop at the end of Instruction
1
© ABB GroupFebruary 21, 2013 | Slide 127
5.2.5.
• Reset Execution Error Signal
• Reset Emergency stop
• System Restarta RAPID .
© ABB GroupFebruary 21, 2013 | Slide 128

65
5.2.5.
• Argument 1 Argument 2
1) Argument 1: Interrupt, Load and Start,Motors On and Start, Start, Start at Main
, . .
© ABB GroupFebruary 21, 2013 | Slide 129
5.2.5.
• Argument 1 Argument 2
2 Argument 2: MultimoveLoad and Start Interrupt
© ABB GroupFebruary 21, 2013 | Slide 130

66
5.2.5.
1
2
3 System Input
© ABB GroupFebruary 21, 2013 | Slide 131
5.2.5.
4
© ABB GroupFebruary 21, 2013 | Slide 132
67
5.2.5.
7
© ABB GroupFebruary 21, 2013 | Slide 133
5.2.6.
•
© ABB GroupFebruary 21, 2013 | Slide 134

68
5.2.6.
Auto On
Cycle On
Emergency Stop
Motion Supervisin On
Motion Supervision Triggered
© ABB GroupFebruary 21, 2013 | Slide 135
5.2.6.
Execution Error
Motor Off State
Motor On State
Motor Off
Motor On
© ABB GroupFebruary 21, 2013 | Slide 136

69
5.2.6.
Power Fail Error
Path return Region Errorr
Runchain Ok
TCP Speed
2 2000mm/s
© ABB GroupFebruary 21, 2013 | Slide 137
5.2.6.
1
2
3 System Output
© ABB GroupFebruary 21, 2013 | Slide 138

70
5.2.6.
4
© ABB GroupFebruary 21, 2013 | Slide 139
5.2.6.
5 Signal Name16
6 Status
© ABB GroupFebruary 21, 2013 | Slide 140

71
5.2.6.
7
© ABB GroupFebruary 21, 2013 | Slide 141
5.2.7.
•
•Logical Cross
Connections
© ABB GroupFebruary 21, 2013 | Slide 142

72
5.2.7.
© ABB GroupFebruary 21, 2013 | Slide 143
5.2.7.
1
2
3 Cross Connection
© ABB GroupFebruary 21, 2013 | Slide 144

73
5.2.7.
4
© ABB GroupFebruary 21, 2013 | Slide 145
5.2.7.
5
6
© ABB GroupFebruary 21, 2013 | Slide 146

74
5.2.8.
•
© ABB GroupFebruary 21, 2013 | Slide 147
5.2.8.
1 ABB I/O
2
© ABB GroupFebruary 21, 2013 | Slide 148

75
5.2.8.
3
© ABB GroupFebruary 21, 2013 | Slide 149
5.2.8.
41)
2) “1 “03)
© ABB GroupFebruary 21, 2013 | Slide 150

76
© ABB GroupFebruary 21, 2013 | Slide 151
5.2.8.
I/OI/O
I/OI/O I/O
© ABB GroupFebruary 21, 2013 | Slide 152
5.2.8.
•
•
•

77
5.2.9.
•
© ABB GroupFebruary 21, 2013 | Slide 153
5.2.9.
123
4
© ABB GroupFebruary 21, 2013 | Slide 154

78
6
6.1.6.2.6.3.6.4.6.5.6.6.6.7.
6.7.1.
6.7.2.
6.7.3.
6.7.4.
6.7.5.
6.7.6.
© ABB GroupFebruary 21, 2013 | Slide 155
MainRoutine
DATA RoutineRoutine
Routine
DATA RoutineRoutine
Routine
DATA RoutineRoutine
Routine
DATA RoutineRoutine
Routine
DATA RoutineRoutine
Routine
DATA RoutineRoutine
Routine
DATA RoutineRoutine
Routine
DATA RoutineRoutine
----
EIO PROCMMC SIOMOC SYS
Flash Disk
hd0a:\
USB bd0:\USB USB:\
6.1.
© ABB GroupFebruary 21, 2013 | Slide 156

79
6.2.
(Module)(Program Module) (System Module)
– (Program Module)
– (System Module)
© ABB GroupFebruary 21, 2013 | Slide 157
6.1.
(Program)– (MainModule)
– (Program Module)
ABB USER BASE
© ABB GroupFebruary 21, 2013 | Slide 158

80
6.1.
(System Module)–
–
© ABB GroupFebruary 21, 2013 | Slide 159
ABB USER BASE
6.2.
Module
Module
Program
Module
(Program) (Module) (Routine)
…
…
Routine
Routine
Data
……
Data
Routine
Routine
Data
Data
© ABB GroupFebruary 21, 2013 | Slide 160
……
……
……

81
6.2.
main
© ABB GroupFebruary 21, 2013 | Slide 161
6.2.
(Program)
(MainModule)
main
Routine
(Data)
(Program Module)
Routine
(Data)
(System Module)
Routine
(Data)
© ABB GroupFebruary 21, 2013 | Slide 162

82
6.3.
1 ABB
23
•
•
•
© ABB GroupFebruary 21, 2013 | Slide 163
6.3.
4 pgf
© ABB GroupFebruary 21, 2013 | Slide 164

83
6.3.
5
© ABB GroupFebruary 21, 2013 | Slide 165
6.4.
1 ABB
23 / …
© ABB GroupFebruary 21, 2013 | Slide 166

84
6.4.
4
© ABB GroupFebruary 21, 2013 | Slide 167
6.4.
5 …
© ABB GroupFebruary 21, 2013 | Slide 168

85
6.5.
1
2
3
4
5
6
7
© ABB GroupFebruary 21, 2013 | Slide 169
6.6.
1
2 “
3
© ABB GroupFebruary 21, 2013 | Slide 170

86
6.6.
4… PP Main
567© ABB Group
February 21, 2013 | Slide 171
6.7. RAPID
1 •
2 •
3 •
4 •
5 •
6 •
© ABB GroupFebruary 21, 2013 | Slide 172

87
6.7.1.
1 ABB
2 13 4
© ABB GroupFebruary 21, 2013 | Slide 173
6.7.1.
1 ABB
2 2 (Program1 ) 5 8
© ABB GroupFebruary 21, 2013 | Slide 174

88
6.7.1.
3•
•
•
© ABB GroupFebruary 21, 2013 | Slide 175
6.7.1.
4 /
© ABB GroupFebruary 21, 2013 | Slide 176

89
6.7.1.
5
© ABB GroupFebruary 21, 2013 | Slide 177
6.7.1.
6 /
© ABB GroupFebruary 21, 2013 | Slide 178

90
6.7.1.
7 /
© ABB GroupFebruary 21, 2013 | Slide 179
6.7.1.
8 /
© ABB GroupFebruary 21, 2013 | Slide 180
91
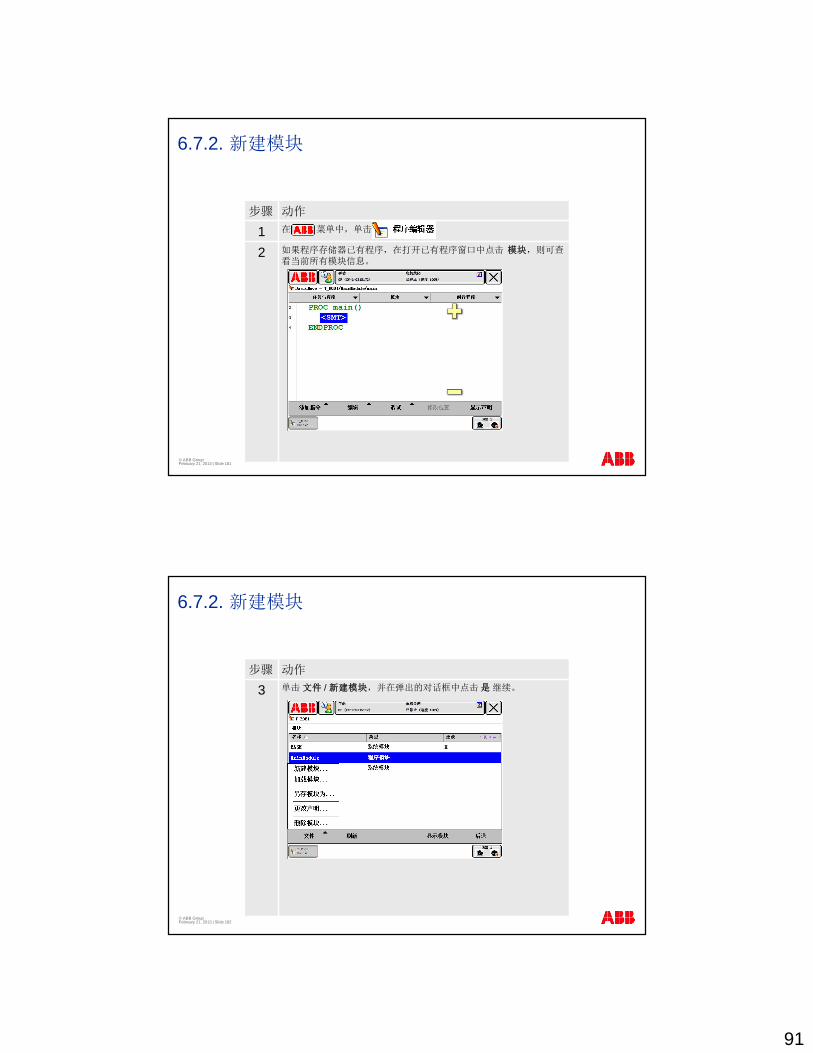
6.7.2.
1 ABB
2
© ABB GroupFebruary 21, 2013 | Slide 181
6.7.2.
3 /
© ABB GroupFebruary 21, 2013 | Slide 182

92
6.7.2.
4
5© ABB GroupFebruary 21, 2013 | Slide 183
6.7.3.
1 ABB
2
© ABB GroupFebruary 21, 2013 | Slide 184

93
6.7.3.
3 /
© ABB GroupFebruary 21, 2013 | Slide 185
6.7.3.
4
© ABB GroupFebruary 21, 2013 | Slide 186

94
6.7.3.
5
© ABB GroupFebruary 21, 2013 | Slide 187
6.7.4.
1 ABB
2
© ABB GroupFebruary 21, 2013 | Slide 188

95
6.7.4.
3
© ABB GroupFebruary 21, 2013 | Slide 189
6.7.4.
4 …
5© ABB GroupFebruary 21, 2013 | Slide 190

96
6.7.5.
1 ABB
2
3
© ABB GroupFebruary 21, 2013 | Slide 191
6.7.5.
3 MoveL
© ABB GroupFebruary 21, 2013 | Slide 192

97
6.7.5.
4 *
© ABB GroupFebruary 21, 2013 | Slide 193
6.7.5.
5
6© ABB GroupFebruary 21, 2013 | Slide 194

98
6.7.6.
1)
2)
© ABB GroupFebruary 21, 2013 | Slide 195
6.7.6.
123 /
© ABB GroupFebruary 21, 2013 | Slide 196

99
6.7.6.
4 PP
PP ( )MP
© ABB GroupFebruary 21, 2013 | Slide 197
PP Main Main
PP
PP
PP
6.7.6.
56
71
© ABB GroupFebruary 21, 2013 | Slide 198

100
6.7.6.
723
© ABB GroupFebruary 21, 2013 | Slide 199
6.7.6.
8 7
9
10 9
11
. .
.
.
.
© ABB GroupFebruary 21, 2013 | Slide 200

101
7
7.1.7.1.1.
7.1.2.
7.1.3.
7.1.4.
7.1.5.
7.1.6.
7.1.7.
7.2.7.2.1.
7.2.2.
7.3.7.3.1. off( )
7.3.2.
© ABB GroupFebruary 21, 2013 | Slide 201
MoveL p1, v100, z10, tPen;
L -
( TCP )
: tooldata
: mm
: zonedata
: mm/s
: speeddata
: robotarget
7.1.1.1. MoveL
© ABB GroupFebruary 21, 2013 | Slide 202

102
7.1.1.1. MoveL
© ABB GroupFebruary 21, 2013 | Slide 203
7.1.1.1. MoveL
1
2 MoveL
© ABB GroupFebruary 21, 2013 | Slide 204

103
7.1.1.1. MoveL
3 *
© ABB GroupFebruary 21, 2013 | Slide 205
7.1.1.1. MoveL
4
© ABB GroupFebruary 21, 2013 | Slide 206
104
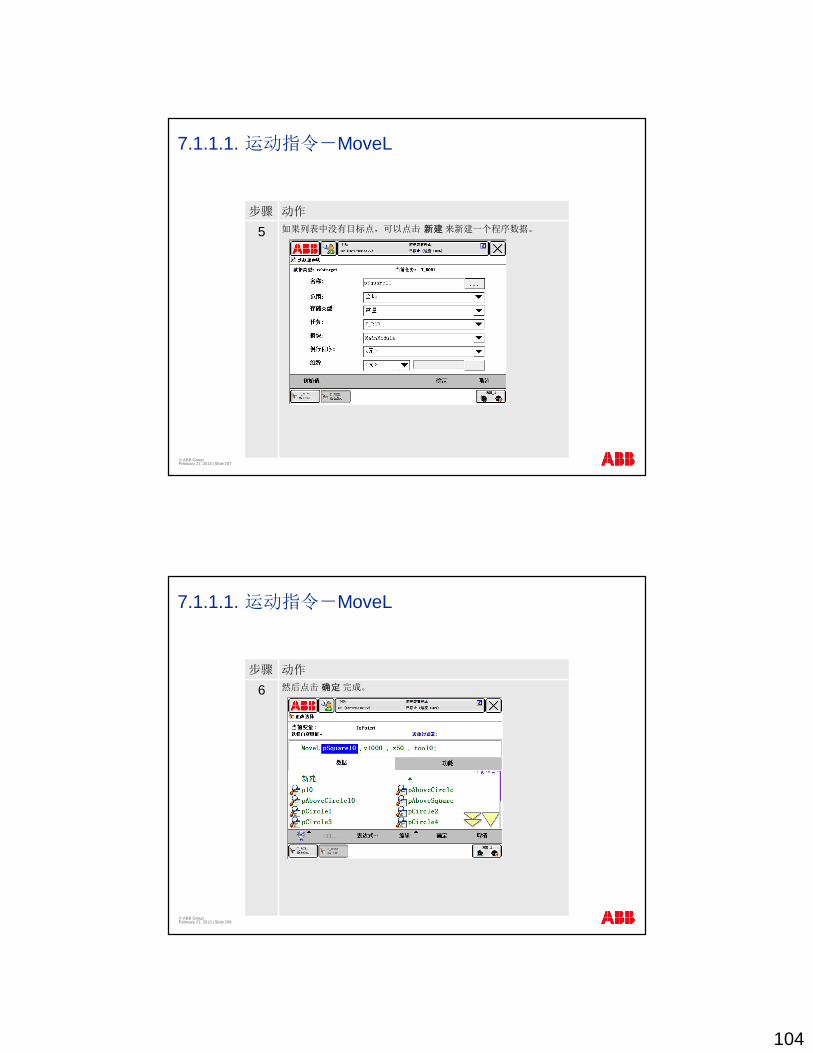
7.1.1.1. MoveL
5
© ABB GroupFebruary 21, 2013 | Slide 207
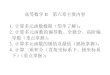
7.1.1.1. MoveL
6
© ABB GroupFebruary 21, 2013 | Slide 208

105
7.1.1.1. MoveL
7 3-6
© ABB GroupFebruary 21, 2013 | Slide 209
MoveJ phome, v100, z10, tPen;
J -
( TCP )
: tooldata
: mm
: zonedata
: mm/s
: speeddata
: robotarget
7.1.1.2. MoveJ
© ABB GroupFebruary 21, 2013 | Slide 210

106
7.1.1.2. MoveJ
© ABB GroupFebruary 21, 2013 | Slide 211
7.1.1.3. MoveC
MoveC p1, p2, v100, z10, tPen;
C
( TCP )
: tooldata
: mm
:zonedata
: mm/s
: speeddata
:robotarget : robotarget
© ABB GroupFebruary 21, 2013 | Slide 212

107
TCP Wobj
MoveAbsJ p1, v100, z10, tPen;
( TCP )
: tooldata
: mm
: zonedata
: mm/s
: speeddata
:jointtarget
7.1.1.4. MoveAbsJ
© ABB GroupFebruary 21, 2013 | Slide 213
7.1.1.4. MoveAbsJ
1
2 MoveAbsJ
© ABB GroupFebruary 21, 2013 | Slide 214

108
7.1.1.4. MoveAbsJ
3 * /
© ABB GroupFebruary 21, 2013 | Slide 215
7.1.1.4. MoveAbsJ
4 6 0
5© ABB GroupFebruary 21, 2013 | Slide 216

109
7.1.2. :=
Data:=Value;Data ( All )
Value ( Sameas Data )
flag1:= FALSE; ( bool )
reg4 := reg1+reg3; ( num )
string1 := “ WELCOME ”; ( string )
pHome := p1; ( robotarget )p1.trans.x := p1.trans.x +20; ( num )
© ABB GroupFebruary 21, 2013 | Slide 217
7.1.3.1. ProcCall
1
2 ProcCall
© ABB GroupFebruary 21, 2013 | Slide 218

110
7.1.3.1. ProcCall
3
4© ABB GroupFebruary 21, 2013 | Slide 219
7.1.3.2. IF
IF <exp>THEN“Yes-part”
ENDIF
Type A
IF <exp> THEN
“Yes-part”
ELSE
“Not-part”
Type B
“Yes-part”
“Yes-part”
“Not-part”
© ABB GroupFebruary 21, 2013 | Slide 220

111
7.1.3.2. IF
IF <exp1> THEN
“Yes-part 1”ELSEIF <exp2>THEN“Yes-part 2”
ELSE
“Not-part”
ENDIF
Type C1
“Yes-part 1”2
“Yes-part 2”
“Not-part”
© ABB GroupFebruary 21, 2013 | Slide 221
7.1.3.2. IF
1
2 IF
© ABB GroupFebruary 21, 2013 | Slide 222

112
7.1.3.2. IF
3 IF ELSEELSEIF IF
© ABB GroupFebruary 21, 2013 | Slide 223
7.1.3.2. IF
4 <EXP>…
© ABB GroupFebruary 21, 2013 | Slide 224

113
7.1.3.2. IF
5
© ABB GroupFebruary 21, 2013 | Slide 225
7.1.3.2. IF
6
© ABB GroupFebruary 21, 2013 | Slide 226

114
7.1.3.2. IF
7
© ABB GroupFebruary 21, 2013 | Slide 227
7.1.3.2. IF
8 /
© ABB GroupFebruary 21, 2013 | Slide 228

115
7.1.3.2. IF
9
© ABB GroupFebruary 21, 2013 | Slide 229
7.1.3.2. IF
10 <SMT>
11© ABB GroupFebruary 21, 2013 | Slide 230

116
7.1.3.3. TEST
TEST reg1 ( )
CASE 1: 1
PATH 1; CASE 1
CASE 2: 2
PATH 2; CASE 2
……DEFAULT:
Error; CASE ,
ENDTEST DEFAULT
© ABB GroupFebruary 21, 2013 | Slide 231
7.1.3.4. WHILE
reg1:=0;WHILE reg1< 5 DO reg1< 5
Square ENDWHILE
reg1:=reg1+1;ENDWHILE
WHILE ENDWHILE
WHILE
© ABB GroupFebruary 21, 2013 | Slide 232

117
7.1.4.
DODI
•
– 1 ( High )
– 0 ( Low )
•
© ABB GroupFebruary 21, 2013 | Slide 233
7.1.4.1. Set
Set do1;
do1( signaldo )
“ 1”
© ABB GroupFebruary 21, 2013 | Slide 234

118
7.1.4.2. Reset
Reset do1;
do1( signaldo )
“ 0
© ABB GroupFebruary 21, 2013 | Slide 235
7.1.4.3. PulseDO
PulseDOdo1;
do1( signaldo )
0.2 s
[\PLength] ( num )
0.001s-2000s
© ABB GroupFebruary 21, 2013 | Slide 236

119
7.1.4.4. WaitDI
WaitDI di1, 1;di1( signaldi )
1( dionum )
[\MaxTime] ( num )
s
[\TimeFlag] ( bool )
TRUE FALSE© ABB GroupFebruary 21, 2013 | Slide 237
7.1.4.4. WaitDI
• [\MaxTime]
( Error Handler )
• [\MaxTime] [\TimeFlag]
FALSETRUE
WaitDI di1, 1 \MaxTime:=5\TimeFlag:=flag1 ;
© ABB GroupFebruary 21, 2013 | Slide 238

120
7.1.5.1. ClkReset
ClkReset clock1;
clock1( clock )
© ABB GroupFebruary 21, 2013 | Slide 239
7.1.5.2. ClkStart
ClkStart clock1;
clock1( clock )
© ABB GroupFebruary 21, 2013 | Slide 240

121
7.1.5.3. ClkStop
ClkStop clock1;
clock1( clock )
© ABB GroupFebruary 21, 2013 | Slide 241
7.1.6.1. TPErase
TPErase;
© ABB GroupFebruary 21, 2013 | Slide 242

122
7.1.6.2. TPWrite
TPWrite string;
string( string )
“xxxxxx”
80© ABB GroupFebruary 21, 2013 | Slide 243
7.1.7.1. WaitTime
WaitTime 5;
5 s( num )
© ABB GroupFebruary 21, 2013 | Slide 244

123
7.1.7.2. VelSet
VelSet 100, 5000;
100 % ( num )
5000 mm/s( num )
VelSet
© ABB GroupFebruary 21, 2013 | Slide 245
7.1.7.3. AccSet
AccSet 100, 100;
100 % ( num )
100 % ( num )
© ABB GroupFebruary 21, 2013 | Slide 246

124
7.1.7.4. GripLoad
GripLoad load0;
load0( num )
© ABB GroupFebruary 21, 2013 | Slide 247
7.2.1
© ABB GroupFebruary 21, 2013 | Slide 248

125
7.2.1
© ABB GroupFebruary 21, 2013 | Slide 249
7.2.2
1

126
7.2.2
2
7.2.2
3
4
© ABB GroupFebruary 21, 2013 | Slide 252

127
7.2.2
5
6© ABB GroupFebruary 21, 2013 | Slide 253
7.2.2
7 \
© ABB GroupFebruary 21, 2013 | Slide 254

128
7.3.1 off( )
Offs(p1,100,50,0) p1X 100mm Y
50mm Z 0
Offs() Wobj
MoveL Offs(p1,100,50,0), v100,……
© ABB GroupFebruary 21, 2013 | Slide 255
7.3.2
1
© ABB GroupFebruary 21, 2013 | Slide 256

129
7.3.2
2offs()
© ABB GroupFebruary 21, 2013 | Slide 257
7.3.2
3 offs()
© ABB GroupFebruary 21, 2013 | Slide 258

130
7.3.2
4 offs() /X
© ABB GroupFebruary 21, 2013 | Slide 259
7.3.2
5 offs() /Y
6 offs() /Z
7 off()
© ABB GroupFebruary 21, 2013 | Slide 260

131
7.3.2
8
© ABB GroupFebruary 21, 2013 | Slide 261
© ABB GroupFebruary 21, 2013 | Slide 262© ABB Group
February 21, 2013 | Slide 262

132
8
8.1.
8.2.
8.3.
© ABB GroupFebruary 21, 2013 | Slide 263
8.1.
?
, Home .( I/O )
,.

133
8.1.
?
, Home .( I/O )
,.
8.2.
??
?

134
8.2.
,
,!
!
8.2.
ABB :
RobotWare// ,

135
8.2.
!
IRC5 !
8.2.
1 ABB
2 .
3 …
© ABB GroupFebruary 21, 2013 | Slide 270

136
8.2.
4 ABC… …
ABB hd0a:/Backup/
© ABB GroupFebruary 21, 2013 | Slide 271
8.3.
?
?

137
8.3.
ABB :
/ ,
, ,
Home HOME
8.3.
S4 IRC ..

138
8.2.
1 ABB
2 .
3 …
© ABB GroupFebruary 21, 2013 | Slide 275
8.3.
4 …
© ABB GroupFebruary 21, 2013 | Slide 276

139
9
9.1. IRC59.1.1.
9.1.2. B-
9.1.3. I-
9.1.4. P-
9.1.5. C-
9.1.6. X-
9.2.
© ABB GroupFebruary 21, 2013 | Slide 277
9.1.
IRC5 ,
----
B- --
I- --P- -- RAPIDC- --X- --
© ABB GroupFebruary 21, 2013 | Slide 278

140
9.1.1.
:
:•
•
•
•
•
© ABB GroupFebruary 21, 2013 | Slide 279
9.1.2. B-
B- :
:
© ABB GroupFebruary 21, 2013 | Slide 280

141
9.1.3. I-
I- :
:
,
© ABB GroupFebruary 21, 2013 | Slide 281
9.1.4. P-
P- : RAPID
:
•
• ,
•

142
9.1.5. C-
C- :
:
•
•
© ABB GroupFebruary 21, 2013 | Slide 283
9.1.6. X-
X- :
:
•
•
•
© ABB GroupFebruary 21, 2013 | Slide 284

143
9.2.
1
2 … ,
3© ABB GroupFebruary 21, 2013 | Slide 285
© ABB GroupFebruary 21, 2013 | Slide 286© ABB Group
February 21, 2013 | Slide 286

144
10 RobotStudio Online
10.1. R.S.O.
10.2. R.S.O.
10.3. R.S.O. RAPID
10.4. R.S.O.
10.5. R.S.O.
10.6. R.S.O.
© ABB GroupFebruary 21, 2013 | Slide 287
10.1. R.S.O.
RobotStudio
RobotStudio Online ( R.S.O.)FlexPendant RW5.11
RobotStudio RobotStudio
Robot Studio Online
RAPIDRAPID .RAPID ( )
/ ( system builder)
/
/ ( ), .
© ABB GroupFebruary 21, 2013 | Slide 288

145
10.2. R.S.O
1IP
© ABB GroupFebruary 21, 2013 | Slide 289
10.2. R.S.O
2 / / ABB Industrial IT / Robotic IT/Robot StudioRobotStudio
3 R.S.O
© ABB GroupFebruary 21, 2013 | Slide 290

146
10.2. R.S.O
4 R.S.O / …
© ABB GroupFebruary 21, 2013 | Slide 291
10.2. R.S.O
5 R.S.O
© ABB GroupFebruary 21, 2013 | Slide 292

147
10.3. R.S.O RAPID
1 RAPID
© ABB GroupFebruary 21, 2013 | Slide 293
10.3. R.S.O RAPID
2
3
© ABB GroupFebruary 21, 2013 | Slide 294

148
10.3. R.S.O RAPID
5 R.S.O. RAPIDRAPID
R.S.O.
© ABB GroupFebruary 21, 2013 | Slide 295
10.3. R.S.O RAPID
4 RAPID R.S.O
© ABB GroupFebruary 21, 2013 | Slide 296

149
10.4. R.S.O.
© ABB GroupFebruary 21, 2013 | Slide 297
10.4. R.S.O.
1 R.S.O
2
© ABB GroupFebruary 21, 2013 | Slide 298

150
10.4. R.S.O.
3Next
© ABB GroupFebruary 21, 2013 | Slide 299
10.4. R.S.O.
4 Next
© ABB GroupFebruary 21, 2013 | Slide 300

151
10.4. R.S.O.
5Next
© ABB GroupFebruary 21, 2013 | Slide 301
10.4. R.S.O.
6Next
© ABB GroupFebruary 21, 2013 | Slide 302

152
10.4. R.S.O.
7 Next
© ABB GroupFebruary 21, 2013 | Slide 303
10.4. R.S.O.
8Next
© ABB GroupFebruary 21, 2013 | Slide 304

153
10.4. R.S.O.
9 HomeNext
© ABB GroupFebruary 21, 2013 | Slide 305
10.4. R.S.O.
10 Finish
© ABB GroupFebruary 21, 2013 | Slide 306

154
10.5. R.S.O.
1 R.S.O
2
3 Next© ABB GroupFebruary 21, 2013 | Slide 307
10.5. R.S.O.
4Next
© ABB GroupFebruary 21, 2013 | Slide 308

155
10.5. R.S.O.
5 Next
© ABB GroupFebruary 21, 2013 | Slide 309
10.5. R.S.O.
6 Finish Next
© ABB GroupFebruary 21, 2013 | Slide 310

156
10.5. R.S.O.
7 RobotWare
© ABB GroupFebruary 21, 2013 | Slide 311
10.5. R.S.O.
8
© ABB GroupFebruary 21, 2013 | Slide 312

157
10.5. R.S.O.
9
© ABB GroupFebruary 21, 2013 | Slide 313
10.5. R.S.O.
10
© ABB GroupFebruary 21, 2013 | Slide 314

158
10.5. R.S.O.
11SYSPAR 6
© ABB GroupFebruary 21, 2013 | Slide 315
10.5. R.S.O.
12 HOMEHOME
© ABB GroupFebruary 21, 2013 | Slide 316

159
10.5. R.S.O.
13 Finish
© ABB GroupFebruary 21, 2013 | Slide 317
10.6. R.S.O.
1 X-
© ABB GroupFebruary 21, 2013 | Slide 318

160
10.6. R.S.O.
2 R.S.O. …
© ABB GroupFebruary 21, 2013 | Slide 319
10.6. R.S.O.
34
© ABB GroupFebruary 21, 2013 | Slide 320

161
10.6. R.S.O.
5 PC
6 Yes
© ABB GroupFebruary 21, 2013 | Slide 321
10.6. R.S.O.
7
© ABB GroupFebruary 21, 2013 | Slide 322

162
11
11.1.11.1.1.
11.1.2.
11.2.11.2.1.
11.2.2.
11.2.3.
© ABB GroupFebruary 21, 2013 | Slide 323
11.1. (Calibration)
1. ( Revolution counters).
, .
, .( SMB )
2. (Fine calibration)
,
ABB
© ABB GroupFebruary 21, 2013 | Slide 324

163
1 ABB , .
2 , .
11.2. –
© ABB GroupFebruary 21, 2013 | Slide 325
11.2. –
… … …
Not calibrated.
Rev. counter update needed.
DANGER!, fine
calibration . ,
© ABB GroupFebruary 21, 2013 | Slide 326

164
11.2.1
Update Rev.Counters
6 (
,
DANGER!,
© ABB GroupFebruary 21, 2013 | Slide 327
1 ABB .
2 .
3
11.2.1
© ABB GroupFebruary 21, 2013 | Slide 328

165
4
11.2.1
© ABB GroupFebruary 21, 2013 | Slide 329
5
6
11.2.1
© ABB GroupFebruary 21, 2013 | Slide 330

166
11.2.2
,
, ,
DANGER!, fine
calibration . ,
© ABB GroupFebruary 21, 2013 | Slide 331
1 ABB .
23 ...
11.2.2
© ABB GroupFebruary 21, 2013 | Slide 332

167
11.2.2
5
absolute accuracy measurement system , Calib. files.absolute accuracy measurement system , Abs. Acc. files.
© ABB GroupFebruary 21, 2013 | Slide 333
1 ABB .
23 ...
11.2.3
© ABB GroupFebruary 21, 2013 | Slide 334

168
11.2.3
4
5
© ABB GroupFebruary 21, 2013 | Slide 335
© ABB GroupFebruary 21, 2013 | Slide 336© ABB Group
February 21, 2013 | Slide 336












![Ù º æ w§ÏQ®Ë Q¯w ® ¶Q¯q ¬ q—çÜ çÃÎÅ J å Ý ¼ ' ÒÒÒÒ w Ï Q®Ë Q¯w ® Q¯q ¬ q Þ a ¼~ wh 7x 's`t !Ëb \q ]_M bwp] Xi^M{¢ å D n 1,0£ »é¬/P bÖ ïÄ×](https://img.dokumen.tips/doc/110x75/5b0146097f8b9a54578df6ea/wq-qw-qq-q-j-w-q-qw-qq-q-a-wh-7x-st-b-q-m-bwp-xim-d-n-10-p-b-xxx.jpg)







![2( q>/ - Utsunomiya...V U ]#ë , 1.4% W5 w , 1.5% IC} w , 3.2% 9× ? #ë , 6.0% %? ¸ w , 3.8% 4c8r!r £ w , 1.5% w2#ë , 2.0% % Ê#ë , 1.9%,q #ë , 0.9% # w , 0.3% ` £ w , 0.5%](https://img.dokumen.tips/doc/110x75/603306edf5e6100b26018eea/2-q-utsunomiya-v-u-14-w5-w-15-ic-w-32-9-.jpg)



![Í ë Ë å 0 f w [ q ] J - SEIKEI](https://img.dokumen.tips/doc/110x75/626267fad1abd17b985c5bb8/-0-f-w-q-j-seikei.jpg)



![4 - env.go.jp · ²U @]Ë ß q Ë _ r! `a q º ! ! ¹ § jk^ bc ñ ¶ B q ¹ § [ +d ! ± ò ì |} tbDä C ÉÎÎ~ Ù - !Q6 ?](https://img.dokumen.tips/doc/110x75/5e296fb23c4ac031d524192d/4-envgojp-u-q-r-a-q-jk-bc-b-q-d.jpg)