Embed Size (px)
Citation preview

1
1. ISC scope and activities
2. Initial Virgo status
3. Design requirements
4. Reference solution and design status
5. Plans toward completion
6. Technical risks
Outline
AdV
ISC subsystem
François BONDU for ISC group

2
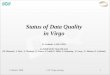
ISC scope and activities
Bring the interferometer to its operating point and keep it here reliably
• Lock acquisitionF. Cavalier (LAL-Orsay), G. Vajente (INFN Pisa – Pisa U)
• Steady state length controlG. Vajente (INFN Pisa – Pisa U)
• Angular controlM. Mantovani (EGO)
• Parametric instabilitiesP.-F. Cohadon (LKB - Paris)
Scope details, task list, interactions with other systems: VIR-085A-08

3
ISC scope and activities
2
2
2
yxs
yx
yxp
YX
YX
lllSREC
llMICH
lllPRCL
LLCARM
LLDARM
Longitudinal control
cm3
m10
MICH
11
DARM

4
Initial Virgo control

5
8MHz
MICH
6MHz
PRCL6MHz
DARM
6MHz
CARM
FREQ
Initial Virgo length control

6
Initial Virgo length control
Feed-forward techniques: VIR-050A-08

7
Initial Virgo angular control
reconstructionmatrix

8
Initial Virgo angular control
reconstructionmatrix

9
Lock acquisition:
• Reliability of lock acquisitiontransients, bandwidthhigh speed mirrors when bad weather
• Actuation compatible witha low-noise “science mode” operationreduced sensitivity to magnetic noises
• Deterministic lock acquisition
Design requirements (1/4)
Ex. vmir = 1 m/s
Initial virgo:Tres / Tsto = 10-2 / 2 10-4 >> 1
AdV:Tres / Tsto = 5 10-4 / 3 10-2 << 1

10
Steady state length control:
• No noise from auxiliary degrees of freedom
• Design with radiation pressure effects
• Additional signal recycling cavity
• Multiple inputs multiple outputs systemobservabilityrobustness
Design requirements (2/4)

11
Alignment:
• Alignment lock acquisition compatible with local controls performances
• No noise in gravitational wave channel from alignment signals
• Design with radiation pressure effects
• Multiple inputs multiple outputs system (18 d.o.f.s)
observability; robustness
Design requirements (3/4)
LIGO P030055

12
Parametric instabilities:
• Should not affect interferometer performances
• Evaluation of PIs in AdV configuration
• Passive or active mitigations
Design requirements (4/4)

13
Reference solution (1/4)
Lock acquisition
• Arm cavity lock acquisition first, with auxiliary lasersCALVA experiment at LAL
• Sensing: laser with 3 modulations
• Driving: Variable finesse

14
Reference solution (1/4) Lock acquisition
CALVA experimentEGO-PRE-STAC-102

15
Reference solution (2/4)
Steady state length control
• Simulation of transfer function with radiation pressure: Optickle (LIGO)
• Increased complexity (almost) diagonal sensing matrixlaser with 3 modulations
• Driving: low noise operationFeed-forward techniquesSuspension hierarchical control
• Robust operation of a multiple inputs multiple outputs system
With
out
radi
atio
n pr
essu
re e
ffec
ts With radiation pressure effects
VIR-068B-08

16
Reference solution (2/4) Steady state length control
CarrierSB1 9.4 MHzSB2 65.6 MHzSB3 8.3 MHz
VIR-068B-08
D.O.F. Single demod. Double demod.
DARM AP_DC AP_DC
CARM SP_SB1_P SP_SB1_P
PRCL SP_SB3_P SP_3+1_P
MICH SP_SB2_P SP_2-1_Q
SREC SP_SB1_P SP_2-1_Q
cm3MICH
displacement of towers

17
Reference solution (2/4) Steady state length control
Schnupp asymmetry and Tower displacements:
• Virgo Schnupp asymmetry (80 cm)+ low SB2 transmission to SREC (diagonalization)
Modulation frequency for SB1 ~ 170 MHz
NOT compatible with high-power, high efficiency photodiode response (DET)
• Small Schnupp asymmetry
This reference solution
Tower displacement and infrastructure modifications
VIR-049A-08

18
Double demodulationSingle demodulation
Use of initial Virgo feed-forwad techniques VIR-050A-08
Reference solution (2/4) Steady state length control

19
Reference solution (2/4) Steady state length control
R.M.S.
(m)
S.D. @ 10 Hz
(m/√Hz)
DARM 2.0 10-14 7 10-20
CARM 1.3 10-14 1 10-16
MICH 1.1 10-11 4 10-17
PRCL 9 10-11 7 10-16
SREC 1 10-10 6 10-18
VIR-080A-08

20
Reference solution (3/4)
Alignment
• Sensing: same modulation frequencies as for the length controlWard technique for arm cavity alignmentcompleteness of sensing matrix (NDRC)pick-off beams reflected by arm cavities
• Robust operation of a multiple inputs multiple outputs system

21
Reference solution (4/4)
Parametric instabilities
Study:
• Parameters with AdV case
• Table-top experiment at LKB, active control?
• LIGO developments (passive / active control)

22
Plans towards completion (1/2)
Documents
• ISC Design Requirement Documentmissing: lock acquisition: comparison of auxiliary laser / mirror decelerators
• ISC Preliminary Design Documentactuation (force) excursion range / noise sensitivitystability & robustness of MIMOS for lengths and alignmentspecifications for pre-stabilized laser linewidth
and arm cavity asymmetryalignment design: parameter tuning, negative torque mitigation
Planning
TBD

23
Plans towards completion (2/2)
Decisions
• Alignment: give up Anderson-Giordano technique
• Steady state length control: single vs. double demodulation schemes
• Steady state length control: modulation frequencies and macroscopic lengths
• Lock acquisition: Combination of auxiliary laser / variable finesse technique

24
Risks
• Alignment:Manpower:
18 dofs, tuning of telescope Gouy phases and demodulation phases, noisesnegative torque mitigation
• Parametric instabilities:Mitigation TBD

25
ISC scope and activities
PAY/DETDAQ
VAC/IME
INJ/LASPAY
OSD
PAYDAQ
DAQ
• Lock acquisitionArm locking with auxiliary laserProcedure for full interferometer locking with “variable finesse” (from dark to bright fringe)
• Steady state length controlLinear locking design: modulation frequencies, macroscopic lengths, couplings, photodiode signalsFeed-forward techniquesLaser frequency stabilizationSpecifications on core mirror seismic isolation
• Angular controlWard technique (New for arm cavities)Parameter tuning for 18 degrees of freedomNoise specificationsModes with effective negative torque
• Parametric instabilitiesCase for AdV mirrorsActive control?