Embed Size (px)
Citation preview

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 1/63
2 ESPACIOS VECTORIALES
Los espacios vectoriales son muy útiles en Ingeniería y Ciencias Aplicadas
debido a las siguientes razones:
- Los vectores son invariantes, es decir, no dependen de los sistemas
coordenados. Sin embargo, las componentes de un vector cambian bajo
un cambio de base.
- Las componentes de vectores iguales son iguales en todo sistema
coordenado.
- Un vector que se anula en algún sistema coordenado se anula en todo
sistema coordenado.
- Los operadores div y rot de un vector son invariantes. También lo son,el producto escalar y vectorial de tales vectores.
- La forma de una ecuación vectorial no cambia bajo una transformación
de coordenadas cartesianas (esto hace factible la representación
geométrica de los vectores).
- El vector incluye el concepto dual de magnitud y dirección
(representación por flechas). Esto se hace especialmente conveniente al
tratar con desplazamientos, velocidades, aceleraciones y fuerzas.
Aunque la representación geométrica de los vectores es útil, larepresentación algebraica ofrece muchas ventajas. El álgebra de los vectoresgeométricos es solamente una interpretación del álgebra abstracta másgeneral, el álgebra de los espacios vectoriales generales. Esta álgebra tratacon las relaciones entre y las operaciones sobre dos clases de objetosmatemáticos que están definidos, que se denominan vectores y escalares.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 2/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
2
2.1 ESPACIOS VECTORIALES
Definición
Un conjunto V de elementos que llamamos vectores es un espacio vectorial
o espacio lineal, si:
a) Existe una operación binaria interna en V, llamada suma o adición de
vectores:
+ : V x V V (2.1-1)
tal que se cumplen los cuatro axiomas siguientes:
a-1) u + v = v + u, u, v V (2.1-2)
denominada propiedad conmutativa de la adición de vectores.
a-2) (u + v ) + w = u + (v + w ) , u, v, w V (2.1-3)
denominada propiedad asociativa de la adición de vectores.
a-3) Existe un elemento en V, denominado el vector nulo o vector cero,
que denotamos 0, tal que:
u + 0 = u , u V (2.1-4)
a-4) u V existe un elemento -u V, denominado el elemento aditivo
inverso, tal que:
u + (-u) = 0 (2.1-5)
Es fácil demostrar que el vector nulo y el aditivo inverso de cualquier vector
son únicos.
b) Existe una operación, llamada multiplicación por escalares:
: x V V (2.1-6)
donde es el conjunto de los números reales y tal que se cumplen los cuatroaxiomas siguientes:
b-1) (u) = ( )u , , , uV (2.1-7)
b-2) (+ )u = u+u, , , uV (2.1-8)
b-3) (u+v) = u+v , , u,vV (2.1-9)

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 3/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
3
b-4) 1u = u, uV (2.1-10)
la propiedad b-1) indica que los escalares se pueden asociar, la propiedadb-2) y b-3) son propiedades distributivas, y la propiedad b-4) normaliza lamultiplicación por escalares
O BSERVACIONES
Casi directamente de la definición de espacio vectorial se desprendenalgunos hechos o propiedades interesantes:
1) El vector nulo 0 es único. Para demostrar esta propiedad, sea
w V, de tal manera que u + w = u , " u V, entonces:
(u+w)+(-u) = u+(-u)
u+[w+(-u)] = 0 ; por axioma a-2 y a-4.
u+[(-u)+w] = 0 ; por axioma a-1.
[u+(-u)]+w = 0 ; por axioma a-2.
0 + w = 0 ; por axioma a-4.
w = 0 ; por axiomas a-1 y a-3.
luego el vector nulo es único.
2) El elemento aditivo inverso es único. Para verlo, consideremos w V tal
que u + w = 0, u V. Entonces:
(u + w) + (-u) = 0 + (-u)
u + [w + (-u)] = -u ; por axiomas a-2 y a-3.
[u + (-u)] + w = -u ; por axiomas a-1 y a-2.
w = -u ; por axioma a-3.
luego, el aditivo inverso es único.
3) 0=0 , ; 0u=0, uV. Si u=0 , entonces =0 ó u=0
En primer lugar, sea , entonces: 0 = (0 + 0) ; por axioma a-3.
= 0 + 0 ; por axioma b-3.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 4/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
4
luego:
0 + [-(0)] = [0 + 0] + [-(0)]
0 = 0 + {0 + [-(0)]} ; por axiomas a-4 y a-2.
0 = 0 + 0 ; por axioma a-4 .
0 = 0 ; por axioma a-3.
En segundo lugar, sea ahora u V, entonces:
0 u = (0 + 0) u
= 0 u + 0 u ; por axioma b-2.
luego:
0 u + [- ( 0 u )] = [0 u + 0 u ] + [- ( 0 u )]
0 = 0 u + {0 u + [- (0 u)]} ; por axiomas a-4 y a-2.
0 = 0 u + 0 ; por axioma a-4.
0 = 0 u ; por axioma a-3.
4) u V, (-1) u = -u
Para verlo, consideremos u V , entonces:
0 = 0 u
= ( 1-1 )u= 1 u + ( -1 )u
= u + ( -1 )u
luego: ( -1 ) u = -u , el aditivo inverso.
5) Las propiedades asociativa y conmutativa de la adición vectorial implican
que la suma de varios vectores es independiente de como se combinen
estos vectores y de como se asocien. Por ejemplo, u, v, w, xV:
(u + v)+(w + x) = [ (u + v) + w ] + x
= [ u + (v + w) ] + x
de tal manera que la suma puede escribirse sin lugar a confusión en la
forma:

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 5/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
5
u + v + w + x
EJEMPLOS DE ESPACIOS VECTORIALES
1) , la recta numérica, con las operaciones habituales de adición ymultiplicación.
2) Sea el conjunto de los números naturales.
Entonces n={v=(x1, x2, . . . , xn)|x i , i[1,n] }, con la adición y
multiplicación por escalares definidas por:
(x1, x2,…, xn )+(y1,y2,…,yn ) = (x1+y1, x2+y2,…, xn+yn )
( x1, x2,…, xn ) = ( x1 , x2 ,…, xn )
3) El conjunto de las funciones reales continuas definidas sobre un intervalo
[a,b] ,que denotamos por Ca b
o
,. Es decir, C
a b
o
,={f|f es continua en
[a,b]}. Las operaciones son:
(f+g)(x)=f(x)+g(x)
(f)(x)=f(x)
f,gCa b
o
,,x[a,b], .
Este es uno de los espacios de funciones más importante en Análisis
Matemático.
4) mxn, el espacio de las matrices reales de orden mxn, con m, n .mxn = { A : A es una matriz real de orden mxn}. Las operaciones son:
A+B=C,a i j+b i j=c i j ,
B=A,b i j=a i j,
A,B,C mxn ,(i,j)1,m]x[1,n], .
5) El espacio de las sucesiones reales
l2 = {v = (x1, x2, .. , xn, ...): xn
n
2
1
< }, con las operaciones:
i) (x1, x2,...,xn,...)+(y1, y2,...,yn, ...) = (x1 + y1 , x2 +y2, ...,x + yn,...)

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 6/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
6
ii) (x1 , x2 , ..., xn , ...) = ( x1 , x2 , ... , xn, ...)
(x1,x2,...,xn,..),(y1,y2,...,ym,..)l2,
La verificación que todas las propiedades para la adición y multiplicación
por escalares se cumplen es bastante simple en todos los casos, excepto
quizás en el ejemplo 5. Veremos este caso como ejercicio. En realidad, la
única dificultad consiste en demostrar que la suma de dos sucesiones en l2 es
también una sucesión en l2. En efecto, si (x1,x2, .., xn, ...) e (y1 , y2 , ... ,yn)
están en l2 , entonces
n
1
|xn|2 < ,
n
1
|yn|2 <
Para la sucesión suma :
n
1|xn + yn|
2
x yn n
n
2
1
=n
1
|xn|2 + 2
n
1
|xn| |yn| +n
1
|yn|2
Pero: (|xn |-|yn |)2>0, luego:
| xn |2-2|xn | |y n |+|yn |
2 >0
|xn |2+|yn |2 >2|xn | |y n |
así:n
1
|xn + yn|2 n
1
|xn|2 + (n
1
|xn|2 +n
1
|yn|2 ) +n
1
|yn|2
= 2n
1
|xn|2 + 2
n
1
|yn|2 <
6) El espacio de las sucesiones reales convergentes c={v=(x1,x2,...):
xxlim nn
}, con las operaciones:
i) (x1, x2,.....)+(y1 , y2, .....) = (x1 + y1 , x2 +y2,.....)
ii) (x1 , x2 , ..., xn , ...) = ( x1 , x2 , .....)
(x1,x2,.....), (y1,y2 ,.....)c,

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 7/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
7
7) El espacio de las sucesiones reales convergentes a cero c0={v=(x1,x2, ...):
0xlim nn
}, con las operaciones del ejemplo 6.
8) El conjunto de todas las sucesiones numéricas acotadas m={v=(x1,x2, ...):
xi< x, i=1,, para algún x }, con las operaciones del ejemplo 6.9) El conjunto ={v=(x1,x2, ...)}, de todas las sucesiones, con las
operaciones del ejemplo 6.
2.2 SUBESPACIOS VECTORIALES
Un subconjunto U de un espacio vectorial V, tal que U , es un
subespacio vectorial si:
a) u,vUu+vU
b) ,uUuU (2.2-1)
Algunos autores substituyen las condiciones a) y b) por la condición
equivalente:
u,vU; , u+ vU (2.2-2)
Por cierto, todo espacio vectorial V tiene al menos dos subespacios,
denominados subespacios triviales que son el subespacio nulo U = { 0 } y
el espacio U = V. Obsérvese que 0 es un elemento común a todo subespacio
de V (¿Por qué?).
Cuando U no es trivial se dice que es un subespacio propio de V.
EJEMPLOS DE SUBESPACIOS VECTORIALES
1) Sea V un espacio vectorial (e.v.) y sea vV, fijo, v0 . El conjunto
U = {v : } es un subespacio (unidimensional) de V. Por cierto, U es
subespacio propio si la dimensión de V es mayor que 1.
La verificación de que U es subespacio es rápida. En primer lugar U,
luego si u,wU, , , entonces:
u+w =( 1v)+ ( 2v)
=( 1+ 2)vU

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 8/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
8
2) El espacio C,a b
oes un subespacio (de dimensión infinita), del espacio de
todas las funciones reales (es decir funciones reales continuas y
discontinuas).
3) U={v n:x1=0} es un subespacio propio de n, sin embargo,
U ={v n:x1 = x2+1} no lo es (¿Por qué?).
4) Sea U = {u C,a b
o: u es un polinomio de grado n} es un subespacio propio
de C a b o
, y de dimensión finita.
5) l2 es un subespacio propio de c0.
6) c0 es un subespacio propio de c.
7) c es un subespacio propio de m.
8) m es un subespacio propio de
.
2.3 INDEPENDENCIA LINEAL , DIMENSIÓN Y BASES
Sea V un e.v.. Decimos que un conjunto finito de n1 vectores
{v1, v2, ..., vn }es linealmente dependiente, l.d., si existe un conjunto de
n escalares { 1, 2 , ... ,n}, no todos nulos tal que:
1v1+ 2v2+.. .+nvn=0 (2.3-1)
Esto significa que al menos uno de los vectores vi
puede expresarse como
combinación lineal de los otros; por ejemplo: si 1 0, entonces:
v1= –1
1( 2v2+ 3v3+.. .+
nvn) (2.3-2)
Cuando un conjunto de n 1 vectores no es l.d. decimos que es linealmente
independiente, l.i. . En otras palabras, un conjunto de n 1 vectores es l.i. si
(2.3-1) implica i = 0, i = 1,2, ... , n.
Decimos que un conjunto l.i. en un espacio vectorial es maximal si no es
subconjunto propio de todo otro conjunto l.i. Decimos que V es un e.v. de
dimensión finita si contiene al menos un conjunto l.i. maximal (finito).
Cuando no sea éste el caso, decimos que V es de dimensión infinita. Por

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 9/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
9
ejemplo, es de dimensión 1 o unidimensional y C,a b
oes de dimensión
infinita.
Directamente de la definición, se obtiene las consecuencias siguientes:
a) Si el conjunto {v1, v2, v3 , ... , vn} es l.d., entonces todo otro conjuntoque lo contenga también lo es,
b) Todo conjunto que contenga al vector nulo es l.d.,
c) Todo subconjunto de un conjunto l.i. es también l.i. .
Para un espacio vectorial de dimensión finita V, se puede encontrar infinitos
conjuntos l.i. y maximales, pero no es difícil demostrar que cada uno de ellos
contiene exactamente el mismo número de vectores. Luego, el número n de
vectores en un conjunto l.i. maximal es una propiedad intrínseca de todo
espacio vectorial de dimensión finita. A este número natural n lo llamamos
dimensión del espacio vectorial V, y escribimos:
n=dimV (2.3-3)
Además, llamamos base para un espacio vectorial V a todo conjunto l.i.
maximal.
Sea ahora {e1,e2, . . . ,en}una base para un espacio vectorial V, con
dimV=n. Entonces el conjunto {e1 ,e2 , . . . ,en ,v}, donde vV, es l.d. (si
no fuese así, el conjunto de los ei no sería una base). Luego, existen n+1
escalares 1 , 2 , ... , n , , con 0, tal que:
1e1+2 e2+.. .+ne
n+v=0
y, por lo tanto:
v =v1e1+v
2e2+.. .+v
ne
n , vi=-
i
v =i
n
1
v ie i (2.3-4)
v =v i e i
es decir, todo vector v V puede expresarse como una combinación linealde los vectores base ei , siendo esta combinación lineal única (¿Por qué?).
Vemos que en el lado izquierdo de (2.3-4), el vector v está escrito usando
notación simbólica (intrínseca o directa), mientras en el lado derecho lo está

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 10/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
10
usando notación indicial, y donde se usó la convención de sumatoria de
Einstein (cada vez que se repite un subíndice en una expresión en notación
indicial, se subentiende sumatoria, para todo i = 1,2, ... , n).
A los escalares vi , i=1,2,...,n, los llamamos componentes (contravarian-
tes) de vV, con respecto a la base {ei}.
Si U es subespacio de un espacio de dimensión finita V, son válidas las
siguientes proposiciones, cuya demostración dejamos como ejercicio:
a) dimUdimV
b) dimU=dimVU=V
Una función : V W, siendo V y W espacios vectoriales, es un
isomorfismo si es lineal y (u) (v) , si u v.
Si existe al menos un isomorfismo desde V a W, decimos que V y W son
isomorfos. Todos los espacios vectoriales de dimensión finita, con igual
dimensión, son isomorfos. Así todo espacio vectorial V, con dimV=n, es
isomorfo an.
EJEMPLOS
1) Sea V = 3,
i) Si dimV = 0 entonces U = { 0 }.
ii) Si dimU = 1 entonces U es una línea que pasa por el origen.
iii) Si dimU = 2 entonces U es un plano que pasa por el origen.
iv) Si dimU = 3 entonces U = V.
2) Sea V = 3 y tomemos el conjunto de cuatro vectores:
S={v1 ,v2 ,v3 ,v4}:
v1=(3,0,-3)
v2=(-1,1,2)
v3= (4,2,-2)

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 11/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
11
v4=(2,1,1)
S es l. d. pues 2 v1+2 v2-v3=0 .
Sin embargo, el conjunto B={u1 ,u2 ,u3}, dado por:
u1=(1,0,0)u2=(0,1,0)
u3=(0,0,1)
es l.i. y maximal; luego es una base (canónica) para3 .
2.4 ESPACIOS VECTORIALES CON PRODUCTO INTERIOR .
Un producto interior sobre un espacio vectorial V es una función
f :VxV , que satisface las siguientes leyes, reglas o axiomas:
c-1) f(u,v)=f(v ,u),u,vV ( 2.4-1)
o propiedad conmutativa,
c-2) f(u,v)=f(u,v),u,vV; (2.4-2)
c-3) f(u+v ,w)=f(u,w)+f(v ,w),u,v ,wV (2.4-3)
es decir, el producto interior es lineal en su primer argumento. La propiedad
conmutativa además asegura que es también lineal en su segundo
argumento.
c-4) f(u,u)0,uV; f(u,u)=0 u=0 , (2.4-4)
Esta propiedad establece el concepto de positivo definido. Como
consecuencia el producto interior es positivo definido.
Es usual llamar al producto interior producto escalar o producto punto,
siendo esta última denominación motivada por la nomenclatura más común
en Ingeniería (donde se usan vectores geométricos), por la linealidad de que
goza el producto interior, y por su conveniencia para operaciones con bases,
como veremos más adelante:
f(u,v)=uv (2.4-5)
Obviamente, llamamos Espacio Vectorial con Producto Interior a un espacio
vectorial V premunido de producto interior. La motivación para introducir

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 12/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
12
un producto interior es la necesidad de trabajar con el concepto de módulo
de un vector.
ESPACIOS VECTORIALES NORMADOS*
Sea V un espacio vectorial. Una norma sobre V es una función || ||:V, v | | v ||, con las siguientes propiedades:
i) ||v ||0,vV
ii) ||v | |=0v=0 (2.4-6)
iii) ||v | |=| | ||v | |, ,vV
iv) ||u+v | | | |u| |+||v | |,u,vV
Si se elimina la condición ii), la función || || es una semi norma sobre V.
Un espacio vectorial sobre el cual se ha definido una norma se denomina
Espacio Vectorial Normado o simplemente Espacio Normado. La norma no
es única; un mismo espacio vectorial puede poseer varias normas.
La magnitud, módulo o norma inducida de un vector es una función,
denotada por | | : V + {0}, v |v|, que asigna a todo vector v V,
v 0 , un número real positivo mediante la regla:
|v |= v v (2.4-7)
por cierto:
|0 |=0 (2.4-8)
Llamamos vector unitario a un vector de módulo unitario, es decir, e es
unitario si |e| = 1.
(2.4-7) indica que un producto interior siempre puede ser usado para definir
una norma sobre V en una forma muy natural. La norma así definida se dice
que es inducida por el producto interior. Lo contrario no es cierto: no toda
norma es inducida o proviene de un producto interior. Sin embargo, existe
una equivalencia entre la norma inducida por el producto interior y cualquier
norma para el caso de un espacio de dimensión finita V. Al respecto tenemos
la siguiente:
Proposición.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 13/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
13
En correspondencia a cualquier norma || || en un espacio de dimensión finita
V, existen m, M + , tal que:
m|v | | |v | |M|v |,vV (2.4-9)
donde | | es la norma inducida por el producto interior. Se dice que || || y | |
son equivalentes.
Demostración.
Sea B={e1,e2, . . . ,en} una base para V, dimV=n , entonces:
M = n max{||e1||,||e2||,...,||en||}
Como B es una base vV, tenemos: v=viei . Por lo tanto:
||v || = ||v i e i | |
|v
i
| ||e i ||
M
n i
n
1
|v i |
pero: |vi | |v |, i= 1,... ,n. Entonces: vi
i
n
1
n|v |, luego:
||u|| M|v|
La desigualdad anterior implica que:
||u-v|| M|u-v |,u,vV
luego || || es una función continua. Así, ella tiene un mínimo en el conjunto
(compacto) { v : |v| = 1 }, el cual llamaremos m, esto es: m|v| = 1= mín{ ||v|| },
además, por el primer axioma de norma se tiene que m > 0.
El caso v=0 no interesa pues la desigualdad propuesta se cumple
trivialmente.
Sea, entonces, v0 , =1
v, entonces: |v| = || |v| = |v| = 1
por lo tanto: ||v | |m. Pero, por el tercer axioma de norma:

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 14/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
14
||v|| = || ||v|| =1
v||v|| m
luego: ||v || m|v |
lo que termina la demostración.
*

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 15/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
15
PROPIEDADES DE UN ESPACIO VECTORIAL
CON PRODUCTO INTERIOR
Las siguientes propiedades de un espacio V con producto interior son de
interés: Proposiciones
a) Desigualdad de Cauchy–Schwarz–Buniakovski (C-S-B),
uv |u v | |u| |v |, u,vV (2.4-10)
b) Desigualdad triangular,
|u + v| |u| + |v|, u, v V (2.4-11)
c) u v |u + v| |u| + |v| , u, v V (2.4-12)
Demostración
a) Desigualdad de C-S-B.
i) Si v = 0 , todos los términos en (2.4.10) son nulos y la desigualdad se
cumple en forma trivial. Por lo tanto, basta considerar el caso
v0 ;
ii) Sea v 0 , , entonces:
0 (u + v) (u + v ) = u u + 2u v + 2 v v
Sea f() = u u + 2u v + 2 v v
Esta función de clase C es convexa y coerciva, luego posee un mínimo en
= o . Para encontrar o se aplica el criterio:
df
do
=2uv+2vv=0 ;
02
d
f d
o
2
2
vv
es decir:o=-u v
v v
luego: 0 |u+ov|2 = |u|2 – u v
v
2
2(2.4-10a)

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 16/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
16
o bien: 0 |u|2 |v|2– |uv |2
luego: |uv|2 |u|2 |v |2
obviamente: uv |uv|
De las dos últimas desigualdades resulta la desigualdad de C-S-B:
uv |uv| |u| |v |
De la expresión (2.4-10a) vemos que la igualdad en la desigualdad de C-S-B
se produce cuando |u+ov|2=0 , es decir, u+ov=0. Por lo tanto, como v
0 resulta |uv |=|u||v | si y solo si u es un múltiplo escalar de v.
Si uv>0, u es un múltiplo escalar no negativo de v (e inversamente).
b) Desigualdad triangular.
Se tiene |u+v |2
=(u+v)(u+v)
=uu+ 2uv+vv
=|u|2+2uv+|v |
2
usando la desigualdad de C-S-B:
|u+v |2 |u|2+2|u| |v |+ |v |2 = (|u|+|v |)2
luego: |u+v | |u|+|v |.
c) En primer lugar demostraremos que:
||u|-|v|| |u-v | |u|+|v |
En efecto:
uvuv
vuvu
uvuv
vuvu
5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 17/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
17
vuvu
vuvu
vuvu
es decir:
como además |u-v | = |u+(-v) | |u|+|-v | = |u|+|v |, tenemos:
||u|- |v | | |u-v | |u|+|v |.
Por otra parte: ||u|- |v | | |u+v | |u|+ |v | es consecuencia de la primera,
considerando v = - v .
EJEMPLOS DE ESPACIOS VECTORIALES
CON PRODUCTO INTERIOR
1) La multiplicación ordinaria en satisface los axiomas de producto interior,luego es un e.v.p.i. .
2) Enn, definamos el siguiente producto interior (llamado canónico o
Euclideano), (x1 , x2 , ... , xn), (y1 , y2 , ... , y
n)
n.
(x1, , x2 , ... , xn) (y1, , y2 , ... , y
n) = xi yi
Es fácil verificar que este producto interior satisface los axiomas
correspondientes. Así n
es un e.v.p.i. .
La forma más general de definir un producto interior enn
es la siguiente:
se toma una matriz real de orden n, simétrica y positiva definida A = [a ij].El producto interior queda definido por : f(u,v)=a i ju iv j ,u,v n
;
u=(u1,u2, . . . ,un) , v=(v1,v2, . . . ,v
n). El producto interior canónico se
obtiene si consideramos A = I, la matriz identidad de orden n.
3) Sea V= C,a b
o. Entonces si f, gV,
b
a
f(x)g(x)dx es un producto interior.
4) En l2, sean u=(x1, x2,.....) y v=(y1, y2 ,.....). Entonces la operación siguiente
define un producto interior en l2:
f(u,v)=uv=x i yi
ANGULO ENTRE VECTORES .

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 18/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
18
Ya que la desigualdad de C-S-B implica que 11
vu
vu, esto nos
permite definir el ángulo entre vectores de la siguiente manera:
cos =
=
u v
u v
uu
vv
= euev (2.4-13)
y donde es el ángulo entre los vectores u y v (u y v diferentes de 0).
Dos vectores son ortogonales o perpendiculares si u v = 0. Así, el vector
nulo es perpendicular a cualquier vector.
2.5 ESPACIOS DE PUNTOS EUCLIDEANOS VECTORES ESPACIALES O GEOMÉTRICOS
Un espacio de puntos Euclideano E es un conjunto de elementos X, Y, ... ,
llamados puntos, tal que cada par de elementos X,YE definen un
segmento de línea dirigido XY
, el cual tiene una longitud dada por el
largo del segmento y una dirección dada por la orientación desde X hacia Y,
ver figura 2.5.1. E es un espacio geométrico.
Figura 2.5.1 Segmento de línea dirigido desde el punto X al punto Y.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 19/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
19
En realidad, existe un número infinito de segmentos de líneas dirigidos
equivalentes al segmento XY
, los que tienen la misma longitud y la misma
dirección. Llamamos vector espacial o vector geométrico al conjunto de
todos los segmentos de línea dirigidos con la misma longitud y dirección, y
lo designamos por {XY
}, con su longitud denotada por |{ XY
}|, o
simplemente |XY
|.
A continuación definiremos las operaciones de adición y multiplicación por
escalares que transformarán al conjunto de los vectores geométricos en un
espacio vectorial en el sentido abstracto.
ADICION DE VECTORES GEOMETRICOS .
La adición de segmentos de línea dirigidos queda definida por:
XY RS = XY + YZ XZ
(2.5-1)
Donde RS
{YZ
}. Esto es, para sumar dos segmentos de línea dirigidos
debe usarse el segmento de línea dirigido equivalente al segundo segmento de
línea original y emplear la ley del paralelógramo. Geométricamente, la
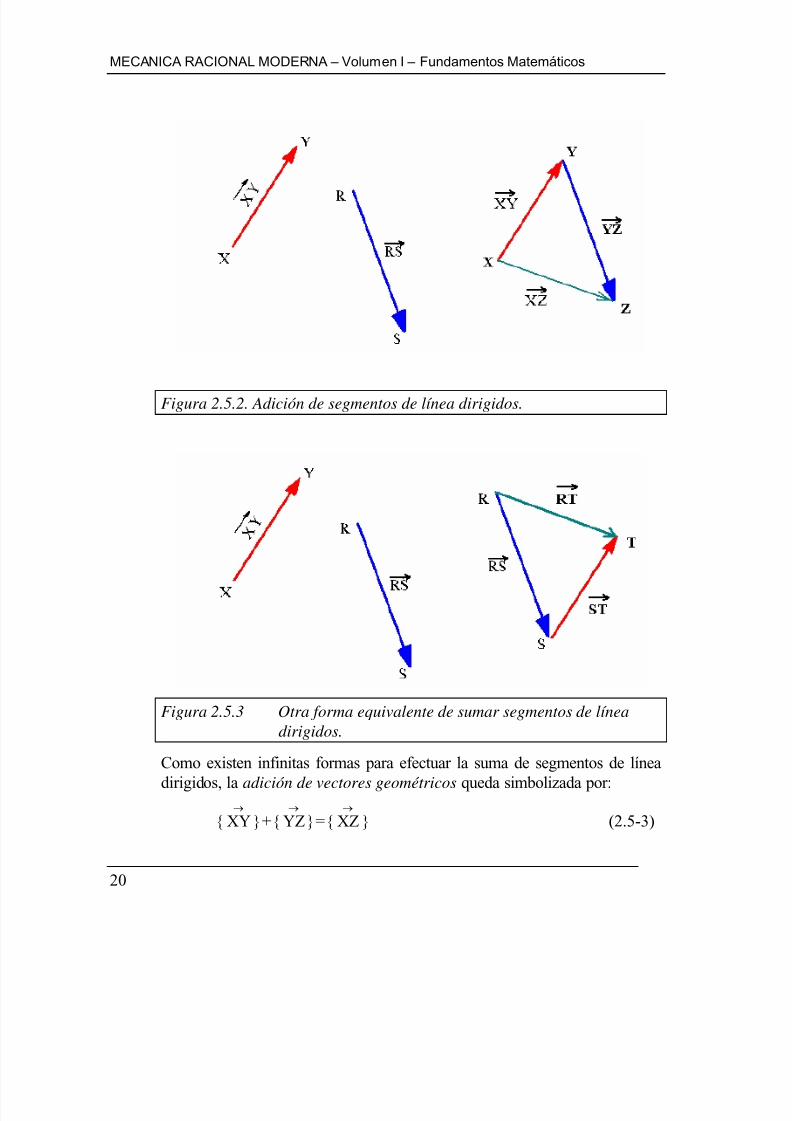
adición de segmentos de líneas dirigidos se representa en la figura 2.5.2.
Obviamente, la suma definida en (2.5-1) también puede ser escrita como:
XY RS RS XY RS ST RT (2.5-2)
donde XY
{ST
}. Geométricamente, esta operación se muestra en la figura
2.5.3.
5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 20/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
20
Figura 2.5.2. Adición de segmentos de línea dirigidos.
Figura 2.5.3 Otra forma equivalente de sumar segmentos de línea
dirigidos.
Como existen infinitas formas para efectuar la suma de segmentos de línea
dirigidos, la adición de vectores geométricos queda simbolizada por:
{ XY
}+{ YZ
}={ XZ
} (2.5-3)
5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 21/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
21
Evidentemente el vector geométrico nulo es {XX
}para cualquier punto X y
el aditivo inverso de {XY
} es {YX
}.
Es materia fácil verificar que la adición de vectores geométricos así definida
satisface los cuatro axiomas para la adición de espacios vectorialesabstractos.
MULTIPLICACIÓN DE VECTORES GEOMÉTRICOS
POR ESCALARES
Sea un escalar y {XY
} un vector geométrico. El vector espacial {XY
} es un vector espacial que tiene la misma dirección de {XY
} si > 0
y la dirección contraria si < 0 y su longitud es || veces la de {XY
}.
Nuevamente, es materia fácil ver que se verifican las propiedades para la
multiplicación por escalares en un espacio vectorial abstracto. Se puede
concluir que el conjunto de los vectores espaciales con estas operaciones
tiene la estructura algebraica de espacio vectorial y los vectores espaciales
definidos sobre un espacio de puntos Euclideano constituyen un espacio
vectorial.
PRODUCTO INTERIOR DE VECTORES GEOMÉTRICOS .
Dotamos de producto interior al espacio vectorial de los vectores
geométricos, a través de la definición del producto escalar entre dos
vectores geométricos {XY
} y {RS
} de la siguiente manera:
{ XY
}{ RS
}=| XY
| | RS
|cos (2.5-4)
donde es el ángulo entre {XY
} y {RS
}.
Este producto escalar satisface las propiedades para producto interior en
espacios vectoriales abstractos (ver (2.4-13) para ver la coherencia de esta
afirmación).

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 22/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
22
Por lo tanto, el conjunto de los vectores geométricos es un espacio vectorial
con producto interior en el sentido abstracto. A tal tipo de espacio lo
llamamos Espacio Vectorial Euclideano o simplemente Espacio
Euclideano.
Como cada par de puntos X,Y E definen un vector en el sentido abstracto{XY
}= v V, la asociación entre puntos X,Y y el vector v puede
expresarse en términos de la operación diferencia de puntos:
- : E x E V, (X,Y) v = Y – X (2.5-5)
tal que: Y=X+v (2.5-6)
De igual manera:
Y-Z=(Y-X)+(X-Z) (2.5-7)
u=v+w=w+v
Geométricamente, la operación diferencia de puntos se muestra en la figura
2.5.4.
Figura 2.5.4. Operación diferencia de puntos.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 23/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
23
La regla (2.5-6) indica que la suma de un punto con un vector es otro punto.
Esto induce a denominar al espacio vectorial V espacio de traslaciones
subyacente al espacio de puntos E, es decir, los vectores pueden usarse para
trasladarse entre puntos de E.
El vector nulo 0 V se obtiene de:
0=X-X,XE (2.5-8)
La distancia entre los puntos X,Y E queda definida por la función
d:ExE +{0},(X,Y)d(X,Y), dada por:
d(X,Y)=|Y-X|= (Y X) (Y X)
(Y X)2 (2.5-9)
ESPACIOS MÉTRICOS*
Sea F un conjunto, F , cuyos elementos designaremos por p, q, ... , y que
llamaremos puntos. Una distancia es una función d: F x F + {0}, tal
que:
i) d(p,q)0 ,p,qF; d(p,q)=0p=q;
ii) d(p, q)=d(q, p) ,p,qF;
iii) d(p,q)d(p,r)+d(r,q) ,p,q,r,F
Si existe tal función d decimos que F es un espacio métrico.
La función distancia introducida en (2.5-9), satisface las axiomas para la
función distancia en espacios métricos abstractos, por lo tanto E es un
espacio métrico. *
En este texto trabajaremos con un espacio de puntos Euclideano
tridimensional E3, de tal manera que su espacio de traslaciones V es de
dimensión 3. Luego, cualquier base para V consiste de tres vectores
linealmente independientes.
2.6 BASES OBLICUAS Y BASES CARTESIANAS: REPRESENTACIÓN
SIMBÓLICA , INDICIAL Y MATRICIAL DE VECTORES

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 24/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
24
Sea V el espacio vectorial Euclideano de traslaciones subyacente al espacio
de puntos Euclideano tridimensional E3. Sabemos que una base para V es un
conjunto de tres vectores base que denotaremos por:
B =
3
2
1
e
e
e
{ei} (2.6-1)
de tal manera que todo vector v V puede ser representado por la
combinación lineal única:
v=v ie i (2.6-2)
donde los escalares vi, i = 1,2,3, reciben el nombre de componentes
contravariantes de v con respecto a la base B.
Al escribir a un vector de V en la forma v estamos usando la notación intrínseca, simbólica o directa y al escribir vi
ei usamos notación indicial,
la que requiere el uso de una base.
Alternativamente, podemos usar las reglas del álgebra de matrices para
denotar cualquier vector; podemos escribir:
v=[v1v
2v
3]
3
2
1
e
e
e
=[v]TB (2.6-3)
ó
v=[e1e2 e3]
3
2
1
v
v
v
=BT[v] (2.6-4)
donde: [v]=
3
2
1
v
v
v
(2.6-5)
es la matriz de componentes (contravariantes) de v con respecto a la base B.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 25/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
25
El producto interior, escalar o producto punto entre los vectores base lo
simbolizamos por:
e ie j=g i j , i, j=1, 2, 3 (2.6-6)
Los gij se denominan coeficientes métricos. La matriz métrica queda
definida por el arreglo [gij].
Debido a la conmutatividad del producto escalar de vectores, se cumple
gij=g
ji, i, j, propiedad de simetría de gij.
Decimos que la base B es ortogonal si:
gij =
jsi,0
jsi,0
(2.6-7)
Decimos que la base B es ortonormal o cartesiana si:
gij = ij =
100
010
001
g, jisi,0
j=isi,1ij (2.6-8)
donde ij se denomina delta de Kronecker . Una base cartesiana consiste solo
de vectores unitarios ortogonales entre sí.
Una base B que no es ortogonal se dice que es oblicua.
Sea B = {ei} una base para V. Decimos que la base B' = {ei} es la base dual o base recíproca de B si y solo si:
e ie j= j
i
ij (2.6-9)
o, equivalentemente:
e ie j= i
j
ij (2.6-10)
Por supuesto, definimos:
e ie j=g i j , [gi j
] (mat riz métri ca dua l) (2.6-11)
Como B' es una base para V, todo vector v puede representarse por la
combinación lineal única:
v=v iei (2.6-12)

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 26/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
26
donde los escalares vi se denominan componentes covariantes de v con
respecto a la base B'.
Proposición
Los coeficientes métricos y componentes de un vector v cumplen:
i) v i=ve i ,v j=ve j
ii) e i=gi je j , B=[g i j]B '
iii) ei=g
i je j , B'=[g
i j]B (2.6-13)
iv) g i jg j k =k
i= i k , [gi j][g i j]=[I]
v) v i=gi jv j (bajar un superíndice) [v]=[g i j][v']
vi) v i=gi jv j (subir un subíndice) [v']=[gi j] [v]
todas fórmulas útiles al trabajar con componentes. Se dice que gij subeíndices y gij baja índices.
Demostración.
i) vei= v
je j e
i= v
j j
i= v
i v = (ve
i)e i
ve i = v je j
e i = v j
i
j= vi v = (ve j)e
j
ii) e i=(e i e j)e j (usando i)
=gi je j (definición)
iii) ei=(e
ie j)e j (usando i)
=gi je j (definición)
iv) k
i=e
iek (definición)
=eigkje
j (usando ii)
=eie
jgkj (linealidad producto escalar)
=gi j
g j k (def. y simetría coef. métricos)
v) v i=ve i (usando i2)
=v je je i (expansión de v en B)
=gi jv j
(def.)

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 27/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
27
vi) vi=ve
i
=v je j
ei
=gi jv j
De (2.6-13)ii se observa que si la base B es ortonormal, la base dual B' esidéntica a B, y de (2.6-13)v se observa que las componentes contravariantes
son iguales a las covariantes. De allí que para el caso de bases cartesianas es
innecesario distinguir entre la base B y su dual B', y entre las componentes
covariantes y contravariantes de un vector v. Esto nos permite escribir para
el caso en que B es una base cartesiana, ortonormal o unitaria:
v=(ve i)e i=v ie i (2.6-14)
A no ser que se establezca explícitamente lo contrario, cada vez que
consideremos una base, ésta será cartesiana, de manera que cualquier vector
puede ser representado en notación indicial cartesiana por:
v=v i e i (2.6-15)
o en notación matricial:
v v v v1 2 3
3
2
1
321
3
2
1
v
v
v
eee=
e
e
e
(2.6-16)
=[v]TB=B
T[v]
Veremos a continuación la conveniencia de usar la nomenclatura deproducto punto para el producto interior en V. Al usar bases cartesianas,
tenemos para el producto interior entre dos vectores u, v V:
uv = u ie i v je j
= u iv je i e j (linealidad del p.i.)
= u iv j i j (la base es cartesiana) (2.6-17)
= u iv i ( i j=0 si i j)
= u1v1+u2v2+u3v3

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 28/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
28
En algunos textos se dice que el producto punto efectúa una contracción de
las direcciones ei , e j . Por otra parte, debido a (2.4-13), el ángulo entre los
vectores u y v está dado por:
cos =u v
u v u v u v1 1 2 2 3 3
(2.6-18)
Obviamente, si v = ei en (2.6-17), obtenemos:
ue i=u je je i
=u j j i (2.6-19)
=u i=|u| |e i |cos
=|u|cos
es decir, la componente ui
del vector u V es la proyección (perpendicular)
de u sobre ei.
El uso de notación indicial cartesiana es una herramienta poderosa en la
demostración de identidades en que participan vectores.
2.7 TEOREMA DE REPRESENTACIÓN DE FUNCIONES LINEALES*
Sea V un espacio vectorial de dimensión finita y sea f : V . Entonces f
es lineal si y solo si existe aV tal que f(v)= a v, vV. El vector a es
único. Demostración.
Consideraremos una base cartesiana para V, con dimV = n. Esta base se
denotará por {ei}.
1) Existencia.
i) () Sea f : V , lineal. Sabemos que vV, tenemos: v = vi ei. Sea
ai = f(ei), i =1,2, ... , n. Entonces, ya que f es lineal:
f(v)=f(vie i)=v if(e i)=a iv i=av;a=a ie i
ii) () sea f(v) = a v entonces:

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 29/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
29
a) f(u+v)=a(u+v)=au+av=f(u)+f(v)
b) f(v)=a(v)=av=f(v)
luego f es lineal.
2) Unicidad.
Supongamos que existen a1 y a2, tal que f(v)=a1 v , f(v)=a2v ,vV,
con a1 a2. entonces
0=f(v)-f(v) = a1v-a2v = (a1-a2)v ,vV
luego a1 -a2 = 0, lo que implica que a1 = a2 , un absurdo.
a es único.
*
2.8 SISTEMA DE COORDENADAS RECTANGULARES PARA E 3
Llamamos origen del Espacio de puntos Euclideano tridimensional E3a un
punto simbolizado por O, donde se aplican los vectores base {ei} de V.
Luego, una base cartesiana de E3 es el conjunto {O, {ei} }. Sin embargo,
esta nomenclatura raramente se usa y el usar una base subentiende la
elección del origen. Por ello la base se indica simplemente con {ei}, o por la
nomenclatura BT = [e1 e2 e3]. Luego, es posible ubicar un punto cualquiera
X E3 mediante su vector de posición r, representado por la diferencia de
puntos:
r=X-O=xie i (2.8-1)
Por ejemplo, el vector de posición del origen es 0.
Las tres componentes del vector de posición xi, i =1,2,3 son las coordenadas
(rectangulares) del punto XE3. Formalmente, las coordenadas del punto
X E3 son los tres campos escalares xi(X), definidos por las funciones
xi : E3 , i = 1,2,3. Decimos que cada una de estas funciones forma un
eje de coordenadas; cada dos de ellas un plano coordenado; y las tres un
sistema de coordenadas para E3
.
Existe un isomorfismo evidente entre los puntos X E3 , los vectores
r = X-O V y el triple (x1 , x2 , x3 ) 3 , que representa las coordenadas
de X con respecto a una base cartesiana dada. Esto permite representar a los

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 30/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
30
vectores libres de V mediante vectores de posición ligados al origen de E3o
mediante tres números reales.
Figura 2.8.1. Sistema de coordenadas para el espacio E 3.
Figura 2.8.2. Base cartesiana derecha en el punto 0 E 3
.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 31/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
31
Eligiendo un orden para el conjunto {e1,e2 ,e3} se determina una
orientación en E3 , V y 3 convirtiendo a éstos en espacios orientados. De
las dos orientaciones posibles para espacios tridimensionales, llamamos a
una positiva o derecha y a la otra negativa o izquierda. A no ser que se diga
otra cosa, todas las orientaciones serán derechas, tal como se muestra en la
figura 2.8.2. Una base derecha sigue la regla de la mano derecha.
2.9 PRODUCTO VECTORIAL .
El producto vectorial es una operación definida por x : V x V V,
(u,v)w = uxv , que satisface los axiomas siguientes:
a) u x v = – v x u,u,vV (2.9-1)
o propiedad anticonmutativa.
b) (u+v)xw = uxw+vxw , u,v ,wV, (2.9-2)
,
o propiedad distributiva.
c) u(uxv) = 0,u,vV (2.9-3)
que establece que el vector producto es perpendicular al primer vector.
La propiedad anticonmutativa a) implica que el vector producto es
también perpendicular al segundo vector.
d) (uxv)(uxv) = (uu)(vv)-(uv)2 (2.9-4)
que establece el módulo del producto vectorial.
Observación
En muchos textos el producto vectorial se denota usando el símbolo "^",
pero nosotros conservaremos la cruz clásica, pues el símbolo "^" lo
reservaremos para el producto antisimétrico o exterior de dos vectores.
Llamamos triple producto escalar de los vectores u, v, w V y que
denotamos por [u, v, w] a:
[u,v ,w]=u(vxw),u,v ,wV (2.9-5)
Los axiomas (2.9-1) a (2.9-4) permiten obtener las siguientes propiedades
para operaciones en que intervienen productos vectoriales:

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 32/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
32
Proposición
1) uxv=0u,v son l.d., (2.9-6)
2) [u,v ,w]=[v ,w,u]=[w,u,v]
= – [u, w, v] = – [v, u, w] = – [w,v,u] (2.9-7)
u, v, w V.
que dice que en el triple producto escalar, los tres vectores producto se
pueden permutar cíclicamente. Esto es, cualquier permutación par
conduce al mismo resultado. Cualquier permutación impar cambia el
signo del resultado.
3) [u+v ,w ,x]=[u,w,x]+ [v ,w ,x] (2.9-8)
u, v, w, x V, , .
4) [u,v ,w]=0u, v, w son l.d. (vectores coplanares). (2.9-9)
5) Sea B una base para V, entonces:
e2xe3=e1, e3xe1=e2 , e1xe2=e3
e3xe2= –e1, e1xe3= –e2, e2xe1= –e3
e ixe i=0 , i=1, 2, 3(sin suma)
6) |uxv |=|u| |v |sen (de 2. 9-4) (2.9-10)
donde es el ángulo entre los vectores u y v, tomado como el menorposible (es decir, 0 ).
Demostración
Solo demostramos las proposiciones 1) y 6) dejando el resto como ejercicio.
1) uxv = 0 u,v son l.d.
() uxv=0
Por el axioma (2.9-4),
0=|u|2
|v |2
– (uv)2
(uv)2=|u|2 |v |2

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 33/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
33
y : (cos)2 =( )u v
u v
2
2 21 entonces =0, y u,v son l.d.
(colineales).
() u,v l.d. u=v , , es decir:|uxv |2=|u|2 |v |2-(uv)2
=2|v |
4-2
|v |4=0
uxv=0
6) |uxv |2=|u|
2|v |
2-|u|
2|v |
2cos
2
=|u|2 |v |2(1-cos2)
=|u|2 |v |2sen2
|u x v| = |u| |v| sen ; 0 .
Observe que no puede ser mayor que , ya que sen < 0 para ángulos
obtusos.
Una forma elegante y compacta de expresar el producto vectorial es a través
de la introducción del símbolo permutador o alternador ijk , definido por:
Definición
ijk =
123deimparnpermutacióunaesijk si,1123deparnpermutacióunaesijk si,1
repitenseíndicesdosmenosalsi,0
(2.9-11)
Luego, todas las fórmulas que expresan el producto vectorial entre vectores
base pueden sintetizarse a:
e ixe j= i j k ek (2.9-12)
Así, en notación indicial cartesiana, el producto vectorial entre dos vectores
u, v, queda dado por:
uxv=u ie ixv je j
=u iv je ixe j (linealidad) (2.9-13)
=u iv j i j k ek

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 34/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
34
También, tenemos:
[e i ,e j ,ek ]=e ixe j ek = i j le l ek
= i j l l k (2.9-14)
= i j k
Recordemos que el determinante de una matriz A = [aij] está definido por las
expresiones equivalentes:
ijk mnp det A =
a a a
a a a
a a a
im in ip
jm jn jp
km kn kp
=
a a a
a a a
a a a
mi ni pi
mj nj pj
mk nk pk
(2.9-15)
Apliquemos esta definición a la matriz:
A=
kpknkm
jp jn jm
ipinim
(2.9-16)
que representa a una matriz cuyo determinante será 1, -1, ó 0. Por ejemplo,
la forma (2.9-16) representará a las matrices:
100
010
001
,
000
101
010
,
011
101
001
, . . . (2.9-17)
(det A= 1) (det A=0) (det A= -1)
Así, aplicando (2.9-15), obtenemos:
i j k mn p=
i in ip
j jn jp
k kn kp
m
m
m
(2.9-18)
= i m( j nkp- j pk n
)- i n( jmkp- j pkm)
+ i p( j mk n- j n
km) (2.9-19)

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 35/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
35
Esta fórmula es importante pues conduce a la siguiente identidad
fundamental entre el símbolo alternador y el delta de Kronecker:
ijk mnk = im( jnkk - jk kn)-in( jmkk - jk km)+ik ( jmkn - jnkm)
= 3im jn - im jk kn - 3in jm + in jk km + ik jmkn - ik jnkm
= 3im jn - im jn - 3in jm + in jm + jmin - jnim
= im jn - in jm
es decir: ijk mnk im jn in jm (2.9-20)
luego, en cualquier expresión donde aparezca la multiplicación de dos
símbolos alternadores (posiblemente provenientes del producto vectorial
entre vectores base), y donde al menos un subíndice aparezca en ambos
alternadores, se puede aplicar (2.9-20) para eliminar el subíndice repetido.
Así, por ejemplo:
a) ijk ljk =il jj-ij jl
=3il-il (2.9-21)
=2il
b) ijk ijk =ii jj-ij ji
=3x3-ii (2.9-22)
=9-3
=6
La identidad (2.9-20) es muy útil para la demostración de identidades en que
aparecen varios productos vectoriales entre vectores, tal como veremos un
poco más adelante.
De acuerdo a (2.9-10) vemos que |uxv| representa el área del paralelógramo
cuyas aristas coinciden con los vectores u y v como se muestra en la figura
2.9.1.
Es interesante observar de (2.9-13) que:

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 36/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
36
uxv=(u2v3-u3v2)e1+(u3v1-u1v3)e2+(u1v2-u2v1)e3
= (u2v3-u3v2)e1-(u1v3-u3v1)e2+(u1v2-u2v1)e3 (2.9-23)
=e e e1 2 3
1 2 3
1 2 3
u u u
v v v
Por otra parte, el producto mixto queda dado por:
uvxw=u ie i v jek xwk ek
=u iv jwk i j k
=u1(v2w3-v3w2)+u2(v3w1-v1w3)+u3(v1w2-v2w1)
[u,v ,w]=u1(v2w3-v3w2)-u2(v1w3-v3w1)+u3(v1w2-v2w1)
Figura 2.9.1. Interpretación geométrica del producto vectorial.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 37/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
37
Figura 2.9.2. Interpretación geométrica del producto mixto.
=
u u u
v v v
w w w
u v w
u v w
u v w
1 2 3
1 2 3
1 2 3
1 1 1
2 2 2
3 3 3
(2.9-24)
ya que el valor de un determinante no cambia si se intercambian líneas por
columnas y vice-versa.
El módulo del producto mixto entre tres vectores nos da el volumen del
paralelepípedo cuyas aristas coinciden con los vectores producto, tal como
se muestra en la figura 2.9.2.
Proposición
El producto vectorial satisface las siguientes identidades:
1) ux(vxw)=(uw)v-(uv)w,u,v ,wV (2.9-25)
2) (uxv)xw=(wu)v-(wv)u, u,v ,wV (2.9-26)
3) (axb)x(cxd)=(cdxa)b-(bcxd)a (2.9-27)
=(daxb)c-(abxc)d
a,b,c ,dV.
Las dos primeras ecuaciones demuestran el hecho de que el producto
vectorial no es una operación asociativa. Así, en el caso del triple producto

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 38/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
38
vectorial es indispensable el uso de paréntesis, cosa que no era necesaria en
el caso del producto mixto.
El producto que aparece en el miembro izquierdo de (2.9-27) se denomina
cuádruple producto vectorial y es importante en la determinación de la
relación entre una base B y su base recíproca B'.
Demostración.
Solo demostraremos la primera identidad, pues las otras se efectúan de
manera muy similar, y las dejamos de ejercicio.
ux(vxw) =u ie i x(v je jxwk ek )
=u iv j wk jkl e i xe l
=u iv j wk jkl i l mem
=u i v jwk jkl mi lem
=u iv jwk j mki em-u iv jwk j ik m em
=u iv jw ie j-u iviwk ek
=(u iwi)(v je j)-(u ivi)(wk ek )
=(uw)v-(uv)w
Las relaciones entre los vectores de una base B y su base recíproca B',con
B =
3
2
1
e
e
e
y B' =
3
2
1
e
e
e
se encuentran dadas en la siguiente:
Proposición
Sea B una base y B' su base recíproca, entonces:
ei = k jieee
ee
321
k j x
x(2.9-28)
donde ijk es una permutación par de 123.
Demostración.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 39/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
39
Basta considerar los dos miembros del lado derecho de (2.9-27), tomando:
a=e1 , b=e2, c=e3, d=v
donde v V es un vector cualquiera. Tenemos:
(e3vxe1)e2-(e2e3xv)e1=(ve1xe2)e3-(e1e2xe3)v
Luego:
(e1e2xe3)v=(ve2xe3)e1+(ve3xe1)e2+(ve1xe2)e3
donde usamos (2.9-7)
Así, el vector v expresado en términos de la base B queda dado por:
3
321
212
321
131
321
32
,,,,,,e
eee
eeve
eee
eeve
eee
eevv
xxx
es decir:
321
213
321
132
321
321
,,
,,
,,
eee
eee
eee
eee
eee
eee
x
x
x
que escritas en forma compacta proporcionan la fórmula (2.9-28).
Observaciones
i) Si B es cartesiana: [e1 ,e2 ,e3]= 1 y e ixe j = ek cuando ijk es permutación
par de 123. Por lo tanto, de (2.9-28):
ei=e i ; i=1,2,3
y B' = B , como ya habíamos visto.
ii) Evidentemente, la relación dual a (2.9-28) es:

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 40/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
40
k ji,,
321
k j
ieee
eee
x, ijk permutación par de 123.
Ejemplo
Sea B =
k ji
j
i
. Demuestre que B es una base (oblicua) para el
espacio de traslaciones V de E3. Encuentre la base dual B' y expanda el
vector v = 4i + 2 j + 3k en términos de B y B'. Determine las matrices de
coeficientes métricos [gij] y [gij] y verifique todas las relaciones (2.6-13).
Solución
i) Verificación que B es una base oblicua.
e1=i, e2= j, e3=i+ j+k
Sea e1+e2+e3=0 , entonces:
i+ j+(i+ j+k)=0
como
k
j
i
es una base,
0
00
0
y la base B es realmente una base. Como e1 e3 = 1 0, la base es
oblicua.
ii) Determinación de la base dual B'.
[e1,e2,e3]=e1e2xe3
=i jx(i+ j+k)
=i(-k+i)
=1
e1 = e2xe3 = jx(i+ j+k) = i-k
e2
= e3xe1 = (i+ j+k)x i = j-k
5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 41/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
41
e3
= e1xe2 = ix j = k
k
k j
ki
B' -
-
9v
2v
4)324(v
33
22
11
ev
ev
ik jiev
3v
1v
1v
33
22
11
ev
ev
ev
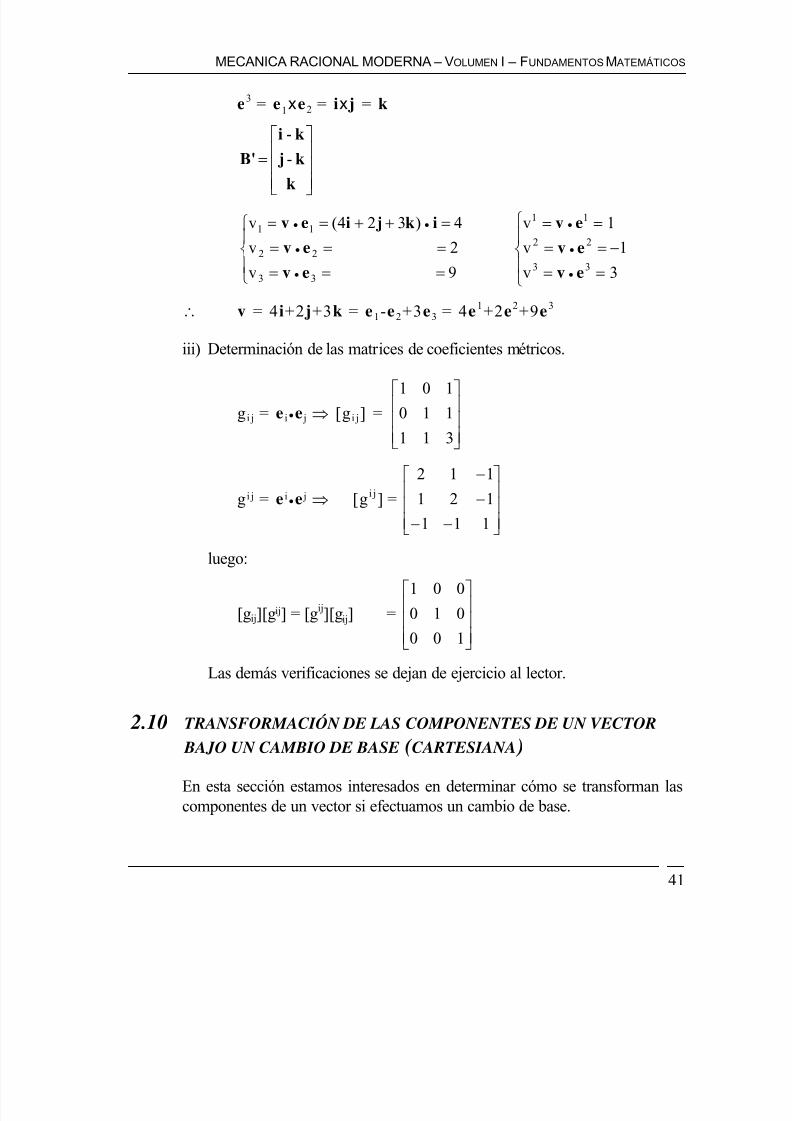
v = 4 i+2 j+3k = e1-e2+3e3 = 4e1+2e
2+9e3
iii) Determinación de las matrices de coeficientes métricos.
g i j = e ie j [g i j] =
311
110101
g i j = e ie j [gi j
] =
111
121
112
luego:
[gij][gij] = [gij][gij] =
100
010
001
Las demás verificaciones se dejan de ejercicio al lector.
2.10 TRANSFORMACIÓN DE LAS COMPONENTES DE UN VECTOR
BAJO UN CAMBIO DE BASE ( CARTESIANA )
En esta sección estamos interesados en determinar cómo se transforman lascomponentes de un vector si efectuamos un cambio de base.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 42/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
42
SeanB=
3
2
1
e
e
e
yB*=
*3
*2
*1
e
e
e
dos bases (cartesianas).
Luego, podemos expresar cada vector unitario de la base B* en términos delos vectores unitarios de la base B:
ei* =(e
i* e j)e j=Q i je j ,i=1,2,3 (2.10-1)
Cada producto escalar ei* e j = Qij ; i=1,2,3; j=1,2,3, representa el coseno
del ángulo entre los vectores e i
*y e j. Debido a que los vectores bases son
unitarios, a Qij lo denominamos coseno director o coseno directriz.
Así las ecuaciones pueden escribirse en notación matricial:
*3
*2
*
1
e
ee
333231
232221
131211
QQQ
QQQQQQ
3
2
1
e
ee
(2.10-2)
B*=[Q]B
La matriz [Q] se denomina matriz de cosenos directrices (directores) ó
matriz de transformación.
Obviamente las relaciones duales a (2.10-1) y (2.10-2) están dadas por:
e i=(e i e j
*
)e j
*
=Q j ie j
*
(2.10-3)
B=[Q]TB*
Cualquier vector v puede escribirse ahora:
v=v ie i=v j* e j
* (2.10-4)
Proposición
a) La matriz [Q] es ortogonal.
b) det[Q]=1
c) vi*=Qijv j , [v*]=[Q][v] (2.10-5)
vi=Q jiv* j , [v]=[Q]T[v*]

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 43/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
43
Demostración
a) B*=[Q]B
=[Q][Q]TB*
[Q][Q]T
=[I]
y : B =[Q]TB
*
=[Q]T[Q]B
[Q]T[Q]=[I]
luego [Q] es ortogonal y [Q]-1
=[Q]T.
b) det T[Q][Q] =det[I]=1
det[Q]det[Q]T=1
(det[Q])2=1
luego: det[Q]=1
Como ambas bases son derechas (a no ser que se diga otra cosa),
debemos tener:
det[Q]=1
c) v i* =ve
i*
=v je j e i*
=v j e i* e j
=v jQ i j
=Q i jv j
ó [v* ]=[Q][v]
v i=ve i
=v i* e
i* e
i
=v j *Q j i
=Q j iv j*
ó [v]=[Q]T[v*]

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 44/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
44
Ejemplo
Sean BT = [i j k] , B
*T =
k ji ji )(
2
1)(
2
1= e e e1 2 3
* * *
a) Calcule [Q] y exprese v = 2i + 3 j - k en términos de B*,
b) Verifique la ortogonalidad de [Q]
Solución
a) [Q] =
100
02
1
2
1
02
1
2
1
, det [Q] =1
2
1
21
(Ambas bases son derechas)
[v*]=
100
02
1
2
1
02
1
2
1
1
3
2
=
1
25
2
1
,
es decir: v=-1
2
5
21 2 3e e e* * *

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 45/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
45
b) [Q][Q]T=
100
0
2
1
2
1
02
1
2
1
100
0
2
1
2
1
02
1
2
1
=
100
010
001
de la misma forma:
[Q]T [Q] =
100
0
2
1
2
1
02
1
2
1
100
0
2
1
2
1
02
1
2
1
100
010
001

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 46/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
46
2.11 REFERENCIAS
1. Anton, H., "Elementary Linear Algebra", John Wiley and Sons,
5th. Ed. (1987).
2. Aris, R., "Vectors, Tensors, and the Basic Equations of Fluid Mechanics",Englewood Cliffs, Prentice Hall (1962).
3. Bartle, R.G., "The Elements of Real Analysis", Wiley International Edition.
(1975).
4. Chadwick, P., "Continuum Mechanics", John Wiley & Sons (1976).
5. Halmos, P.R., "Finite-dimensional Vector Spaces",2d.Ed.Van Nostrand
(1958).
6. Hoffman K. and Kunze R., "Linear Algebra", Prentice Hall, Englewood
Cliffs (1961).
7. Leigh, D.C., "Nonlinear Continuum Mechanics", Mc Graw Hill (1968).
8. Merrit, F.S., "Métodos matemáticos modernos en Ingeniería", Editorial
Labor S.A. (1976).
9. Slattery, J.C., "Momentum, Energy and Mass Transfer in Continua", Mc
Graw Hill (1972).
10. Grossman, S.I., “Algebra Lineal con Aplicaciones”. Mc Graw Hill (1992)

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 47/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
47
2.12 PROBLEMAS .
1) Sea V =2
= {v = (x, y) : x, y ). Definimos la adición y multiplicación
por escalares en la forma siguiente:
+:VxVV;(x,y)+(x 1,y1)=(x+x1,y+y1)
: xVV;(x,y)=(x,y)
(x,y),(x1,y1)V,
Determine si V es un espacio vectorial con estas operaciones. Fundamente
su respuesta.
2) Sea V un e.v., y sean las operaciones:
: V x VV ; u v= u - v (adición);
: x VV ; u = -u (multiplicación por escalares)
donde las operaciones del segundo miembro son las usuales. ¿Qué axiomas
para espacios vectoriales se cumplen para V con las operaciones y ?
3) Sea V = Pn el conjunto de todas las funciones f : , definidas en la
forma:
f(x)=ao+a 1x+a 2x2++a nxn,x
donde o, 1, 2, ..., n
son números reales arbitrarios pero fijos (no
dependen de x). Una función de este tipo se denomina polinomio (de grado
n) sobre . Establezca formalmente la adición de polinomios y lamultiplicación de polinomios por escalares para que Pn sea un espacio
vectorial. Demuestre que Pn es un subespacio vectorial de CRo .
4) Sea V= n, n 3. Cada v n podemos denotarlo por v(x1,x2,,xn).
¿Cuáles de los siguientes conjuntos de vectores en n son subespacios?:
a) U={v:x10}
b) U={v :x1+3x2=x3}
c) U={v :
x1=x2}d) U={v :x1x2=0}
e) U={v :x1Q}, Q es el conjunto de los números racionales.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 48/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
48
5) Sea V = CR el conjunto de todas las funciones f : , con las
operaciones usuales de adición y multiplicación por escalares.
¿Cuáles de los siguientes conjuntos de funciones son subespacios de CR :
a) U={f :f(x2)=[f(x)]2,x }
b) U={f : f(0)=f(1)}
c) U={f :f(3)=1+f(-5)}
d) U={f : f(-1)=0}
e) U={f : f CRo }(funciones continuas)
f) U={f : f CR1 tal que f'+2f=0,x } (funciones continuamente
diferenciables o de clase C1).
6) Sea n , n 2. Sea V el espacio vectorial de todas las matrices cuadradasde orden n. ¿Cuáles de los siguientes conjuntos de matrices A en el espacio
V son subespacios?:
a) U = {A : A es inversible}
b) U = {A : A es no inversible}
c) U = {A : AB = BA, para alguna B V}
d) U = {A : A2 = A}
7) Sea V = P3 , el espacio vectorial de los polinomios de grado 3. ¿Cuáles de los
siguientes conjuntos de polinomios son subespacios de P3?:
a) U={f P3:a0=0}
b) U={f P3:a 0+a 1+a 2+a3=0}
c) U={f P3:a 0,a 1,a 2,a 3Z},
Z es el conjunto de los números enteros.
d) U={f P3:a2=a3=0}
8) Considere un sistema algebraico lineal de m ecuaciones en n incógnitas:
A x = b

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 49/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
49
A =
m
2
1
n
2
1
mn2m1m
n22221
n11211
b
b
b
x
x
x
aaa
aaa
aaa
=b ,=x,
A es una matriz de orden (m x n), x de (nx1) y b de (m x 1). Demuestre que
el conjunto de soluciones del sistema homogéneo A x = 0, U= {x n: A x =
0} es un subespacio de n, que denominamos espacio de soluciones de A x
= 0.
9) Sea V un espacio vectorial y U1 ,U2 dos subespacios de V.
a) Demuestre que U3 = U1 U2 es también subespacio;
b) Sean U1 y U2 tales que U1 U2 es también subespacio. Demuestre que
uno de los subespacios está contenido en el otro;c) Mostrando un contraejemplo, demuestre que la unión de dos subespacios
no es en general un subespacio.
10) Demuestre, usando un contraejemplo, que si U es un subespacio de un
espacio vectorial de dimensión infinita V, entonces no es cierto que
dimU = dimV U= V, implicación válida si V es de dimensión finita, como
se vio en la sección 2.3.
11) Sea S = {v1, v2 , , vr} un conjunto de r vectores en un espacio vectorial V.
a) Demuestre que el conjunto U de todas las combinaciones lineales devectores en S, U = {v V; v = 1 v1 ++ r vr ; i } es un
subespacio de V.
b) Demuestre que U es el subespacio más pequeño que contiene a S, pues
cualquier otro subespacio de V que contenga a S debe también contener
a U.
Simbolizamos a U < S> y decimos que S genera al subespacio U, o
que U es generado por S.
c) Sean v1 , v2 dos vectores no colineales en 3. Esquematice < S >, con
S = {v1 , v2}. ¿Qué sucede si v1 y v2 son colineales, es decir v2 = v1,
para algún ?.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 50/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
50
12) Sea U cualquier plano que pasa por el origen en3 , es decir,
U={u 3,u=(x,y,z):x+y+ z=0;, , }. Demuestre que U es
un subespacio de 3. Demuestre el resultado equivalente para cualquier
línea en3
que pasa por el origen.
13) Sean u, v,wV, con V espacio vectorial. Demuestre que el conjunto {u-v,v-w, w-u} es l.d..
14) Sea V = C2R (ver capítulo 4).
a) Demuestre que con las operaciones usuales de adición de funciones y
multiplicación de funciones por escalares, el conjunto V de todas las
funciones de clase C2 en , constituye un espacio vectorial, el cual es un
subespacio de CR.
b) Demuestre que las funciones f, g, h CR2 son l.i. si el Wronskiano
W(f, g, h), definido por:
W (f,g,h) =
h''g''f''
h'g'f'
hgf
no es la función nula.
c) Demuestre que los conjuntos {1, x, ex} y {ex , xex , x2 ex} son l.i..
15) Sea V un espacio vectorial generado por un conjunto finito de vectores
{v1 , v2 , vm }, m ,
a) Demuestre que todo conjunto l.i. de vectores en V es finito y contiene a
lo más m elementos,
b) Demuestre que dos bases cualesquiera de V tienen el mismo número
(finito) de vectores.
16) Demuestre que el conjunto de polinomios S = {1,x,x 2, . . . , xn} forman
una base para Pn, es decir, S genera a Pn.
17) Determine una base para el espacio de soluciones del sistema:
2x1+2x2-x3+x5=0
-x1-x2+2x3-3x4+x5=0
x1+x2-2x3-x5=0

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 51/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
51
x3+x4+x5=0
Indicación: Demuestre que existen infinitas soluciones, las cuales pueden
escribirse en forma paramétrica por:
tx
0x
tx
sx
tsx
5
4
3
2
1
s,t
18) Determine bases para los siguientes subespacios de3:
a) El plano de ecuación 3x-2y+5z=0
b) El plano de ecuación x-y=0
c) La línea de ecuación paramétrica x=2t,y= -t,z=4t.
d) El conjunto de todos los vectores de la forma (x,y,z), con y=x+z.
19) Sea V=Pn , con p,q Pn. Definamos:
<p,q>= dx)x(q)x(pb
a
a,b, fijos, a<b.
Demuestre que < , > define un producto interior para Pn.
20) Sea V= 3y u=(u1,u2,u3),v=(v1,v2,v3) 3. Determine cuáles de lassiguientes funciones f :VxVR definen un producto interior en 3:
a) f(u,v)=u1v1+u3v3
b) f(u,v)=u12v1
2+u2
2v2
2+u3
2v3
2
c) f(u,v)=2u1v1+u2v2+4u3v3
d) f(u,v)=u1v1-u2v2+u3v3
21) Sea V un e.v.p.i. Demuestre que:
a) |u-v |= 2 ,si u y v son vectores unitarios ortogonales.
b) |u+v |2+|u-v |2=2|u|2+2|v |2 ,u,vV

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 52/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
52
c) uv=4
1|u+v |
2-
4
1|u-v |
2,u,vV
22) Sea {v1, v2, v3, ... , vr} un conjunto de vectores ortogonales de a pares en un
espacio vectorial con producto interior V, es decir:
v i v j=0 si i j
Demuestre el Teorema de Pitágoras generalizado:
|v1+v2++v r |2=|v1 |2+|v2 |2+ +|v r |
2
23) Usando vectores geométricos en el plano, demuestre que un triángulo
inscrito en un círculo, con uno de sus catetos igual al diámetro del círculo,
debe necesariamente ser un triángulo rectángulo.
24) Sea V un e.v.p.i.. Demuestre que si w V es ortogonal a cada uno de los
vectores en S = {v1, v2, , vr}, entonces es ortogonal a todo v < S >.25) Use las desigualdades de C-S-B y del triángulo para demostrar que:
a) (cos+sen)2 2 + 2, ,,
b) 1
o
221
odxxf dxxgxf
1
o
2 dxxg
2 / 11
o
22 / 11
o
2dxxf dxxgxf
+ 2 / 11
o
2dxxg
f, g Cº[0,1]
26) Sea V un e.v.p.i. y S = {e1, e2, , er} un conjunto ortonormal de vectoresen V. Si W = < S >, demuestre que todo v V puede descomponerse en la
forma:
v=w1+w2
donde w1 W y w2 es ortogonal a W, esto es:
w1= ( )v e e
i i
i
r
1
w2=v- ( )v e e i i
i
r
1
Demuestre que w1 es la mejor aproximación a v V, en el sentido que:

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 53/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
53
|v-w1 |< |v-w |, wW,ww1
Esquematice geométricamente este resultado en E3 cuando W es un plano
pasando por el origen, usando vectores geométricos representados por
segmentos de línea dirigidos.
27) Sea V= CRo . Considere U = {sen(x), cos(x)}, el subespacio de V generado
por las funciones f = sen(x) y g = cos(x).
a) Demuestre que , f 1(x)=sen(x+) y g1(x)=cos(x+) son
vectores en U,
b) Demuestre que f 1 y g1 forman una base para U.
28) Sea {e1, e2, . . .,en} una base cartesiana para un e.v.p.i. V. Demuestre que si
i es el ángulo entre un vector arbitrario vV y e i , i = 1,2, . . ., n,
entonces:
n
1ii
21cos
29) Sea S = {v1, v2, , vn} un conjunto ortogonal de vectores que genera un
espacio vectorial con producto interior V.
a) Demuestre que S es un conjunto l.i., luego es una base para V;
b) v= ( ) ( ) , ,v vv
vv e e e
v
vv
i
n
ii
i
i i ii
i
con V1
2
30) Sea V un e.v.p.i. y S V, S cualquier conjunto de vectores en V.
Llamamos complemento ortogonal al conjunto S de los vectores de V
ortogonales a todo vector de S. Así, por ejemplo, {0} = V.
a) Demuestre que S
es un subespacio de V,
b) Demuestre que < S > (S) , es decir, (S) contiene al subespacio
generado por S. Si V es de dimensión finita demuestre que
(S) = < S >.
c) Sea V = Cº[-1,1], con el producto interior definido por:
< f, g> = 1
1f
(t) g(t) dt , f, g C
,1 1
o

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 54/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
54
demuestre que el conjunto U de las funciones impares en [-1,1] es un
subespacio de V. Encuentre U , el complemento ortogonal de U.
31) Sea V un e.v.p.i. de dimensión finita, dimV = n. Sea {v1, v2, , v
n} una
base para V.
a) Sean:
e1=v
v
1
1
w2=v2-(v2e1)e1,e2=w
w
2
2
w3=v3-(v3e1)e1 -(v3e2)e2,e3=w
w
3
3
en=
w
w
n
n
Demuestre que el conjunto {e1,e2, , en} es una base cartesiana para V.
Este procedimiento, que genera una base cartesiana a partir de una base
cualquiera para un e.v.p.i. de dimensión finita, se denomina Proceso deOrtonormalización de Gram-Schmidt, y asegura que todo e.v.p.i. de
dimensión finita tiene al menos una base ortonormal.
b) Sea V =2
, i = (1,0) , j= (0,1). Demuestre que {2i- j , i+ j} es una base
para 2. Encuentre la base cartesiana asociada por el Proceso de Gram-
Schmidt.
32) Sea V un e.v.p.i. Sean a,b,c1 ,c2 V y 1 , 2 , 1 , 2 , todos fijos.
Determine los vectores u, v V que satisfacen el sistema:
1u+ 1(vb)a=c1
2(ub)a+ 2v=c2

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 55/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
55
33) Sea V un e.v.p.i. Sean a, b V y , todos fijos y 0. Demuestre que
el vector (único) v V que cumple la ecuación:
v+vxa=b
está dado por:
v =
2
2 2
b b a a b a
a
( ) ( )
( )
x
34) Sea S . Si S es acotado superiormente, decimos que una cota superior
de S es un supremo ( o menor cota superior) de S si es menor que cualquier
otra cota superior de S. Es decir, x es un supremo del subconjunto
propio S de si:
i) yx, yS;
ii) Si zR, tal que yz, yS xz.
Considere V= n , con las funciones || ||1 y || || : n , definidas por:
||u||1=|x1|+|x2|++|xn|
||u||=sup{|x1|,|x2|, ,|xn|}
u=(x1,x2 ,,xn)
n
a) Demuestre que las funciones || ||1 y || || son normas para n.
b) Demuestre que:
|uv | | |u| |1 | |v | |1
|uv | | |u| | ||v | | , u,v n
c) Si u, v Rn, entonces ¿Es verdad que
||u+v | |=||u| |+||v | | u=v ó v=u, ,
para cualquiera de las dos normas definidas antes?.
35) Considere el espacio de puntos Euclideano E3, con espacio de traslaciones
V. Sea BT = [e1 e2 e3] una base cartesiana de E3. Considere sobre V el
producto interior canónico.
Sean u=e1-e2+2e3, v=3e1-e2+e3
a) Encuentre u+v, u-v, |u+v|, |u-v|, |u|, |v|, uv;

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 56/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
56
b) Verifique las desigualdades de C-S-B y del triángulo para estos casos
particulares.
36) Sea E un espacio de puntos tridimensional, con V su espacio de traslaciones
con producto interior.
a) Demuestre que:
i) |u+v |2+|u-v |2=2|u|2+2|v |2 ,u,vV
ii) |u+v| |u-v | |u|2+|v |2,u,vV
iii) |u+v| |u-v |= |u|2+|v |
2uv=0
b) Sea E = E2 = 2. Interprete geométricamente los resultados de la parte
a). ( Indicación: Considere los paralelógramos cuyas aristas coinciden
con los vectores u, v y cuyas diagonales coinciden con los vectores u+v
y u-v).
37) Sea E=E3= 3 y sean X=(1 ,0 ,1 ), Y=(1 ,1 ,1 ) y Z=(2 ,0 ,1 ) tres puntos de
E.
a) Encuentre los siguientes vectores geométricos:
u={XY
}, v={YZ
}, w={XZ
}
b) Encuentre los vectores espaciales: u+v , w-v , w-u
c) Encuentre los puntos: X+u,X+v ,X+w ;
d) Calcule las distancias entre puntos: d ;Y,ZdyX,Z,dX,Y
e) Verifique las desigualdades de C-S-B y del triángulo usando los vectores
u y v;
38) Determine el ángulo entre la diagonal de un cubo y una de sus aristas.
39) Sea E = 3. Sean X=(2,1,-1) e Y= (1,2,1). Encuentre un vector geométrico
perpendicular a los vectores {OX
} y {OY
}.
40) Encuentre la ecuación del plano perpendicular al vector v=4 i+2 j+kV,
V el espacio de traslaciones de E3, y que pasa por el punto P(1,2,3).
41) Sean B y B’ una base y su base recíproca, respectivamente. Demuestre que:
a) Una base tiene una única base recíproca

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 57/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
57
b) La base original es recíproca a su base recíproca
c) El volumen [a,b,c] del paralelepípedo formado por los vectores base de
la base original es el inverso del volumen [a’,b’,c’] del paralelepípedo
formado por los vectores base de la base recíproca.
42) Sea V el espacio Euclideano tridimensional, y BT = [i j k] la base canónica
para V. Considere:
B1 =
k ji
ji
ji
=B y
k
ji
ji
2)(2
1
)(2
1
a) Demuestre que B1 es una base cartesiana para V (derecha), mientras B2
es una base oblicua,
b) Determine la base dual de B2 y expanda v = i+2 j+k en términos de B2 y
de su base dual B2
'
c) Encuentre la matriz de transformación asociada con las bases B y B1 y
verifique su ortogonalidad,
d) Usando el proceso de ortonormalización de Gram-Schmidt construya
una base cartesiana a partir de B2.
43) Considere E3. Sean X = (1,1,-1), Y = (2,-1, 1) y Z = (-1,1,1).
a) Encuentre los vectores de posición de los tres puntos dados;
b) Calcule la distancia entre los puntos X e Y, X y Z, e Y y Z;
c) Calcule los ángulos del triángulo cuyos vértices están dados por X, Y, Z,
y las aristas del mismo triángulo.
44) Los vectores de posición r de los puntos ubicados sobre una recta que pasa
por el punto de vector de posición ro y orientada paralelamente al vector
unitario e están dados por la ecuación r = ro + e , . Demuestreque la ecuación de la recta perpendicular a la recta anterior y que pasa por
un punto r1 no perteneciente a la primera recta, es dada por

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 58/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
58
r=r1+[ex(r1-ro)]xe , .
45) Demuestre que la distancia (menor) desde un punto X a la recta que une los
puntos Y y Z está dada por:
h=(X O) (Y O) (Y O) (Z O) (Z O) (X O)
Y Z
x x x
46) Verifique que r=ro+s- t, , y donde ro , s, t V son vectores
fijos, representa un plano.
47) Determine las matrices de transformación que representan una rotación de
bases en un ángulo con respecto al eje x1, al eje x2 y al eje x3, en sentido
positivo (antihorario).
48) Sea V un e.v.p.i., a V, fijo , a 0 y , fijo. Demuestre que la
solución de la ecuación vectorial:
va=
está dada por:
v=
aa b a
2 x
siendo b un vector arbitrario. Es decir, la ecuación vectorial tiene infinitas
soluciones.
49) Sea V un e.v.p.i. y sean a, b V, fijos, a 0 . Demuestre que la soluciónde la ecuación vectorial:
vxa=b
está dada por:
v=1
2a
a b a , arbitrario.
Es decir, la ecuación vectorial tiene infinitas soluciones.
50) Sea V un e.v.p.i.. Sean a,b,c ,dV, todos fijos y a,b,d0 . Demuestre quela solución de la ecuación vectorial:
v xd-(bv)a=c

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 59/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
59
está dada por:
v=
cbdba
da
dc
dbx)x(
)(
)(
1
¿Qué sucede si b d = 0 ó a d = 0?
51) Sea V un e.v.p.i., y sean a,b,c ,dV, a,b,c0 y , fijo, 0.
Demuestre que la solución de la ecuación vectorial.
v + v x a + (b v) c = d , con v a = 0
está dada por:
v=
)(
)(
)(122
acc ac
ad add
axx
con c a 0 . ¿Qué sucede si a y c son ortogonales? .
52) Considere la rotación un ángulo por la regla de la mano derecha de un
vector x a un vector y, siendo e un vector unitario en la dirección del eje de
rotación.
a) Demuestre que: y-x=-(1-cos)[x-(xe)e]+sen(exx)
b) Demuestre que para ángulos de rotación pequeños:
y-x=xx, donde =e
c) De acuerdo a la parte b), ¿Cuál es el resultado de dos rotacionessucesivas pequeñas?, ¿Qué implica esto acerca de la posibilidad de
especificar rotaciones pequeñas usando un vector?
d) ¿Cuán pequeño debe ser para que la fórmula de la parte b) tenga por
lo menos 10% de exactitud?.
53) Explique por qué la definición geométrica usual para el módulo del producto
vectorial entre dos vectores u y v (2.9-10) da como resultado un vector
(|uxv |=|u| |v |sen). Explique por qué la definición no dará un vector si la
magnitud |u x v| se substituye por |u| |v| cos ó |u| |v| sen 2. Refuerze su
discusión con cálculos detallados.

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 60/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
60
54) Demuestre que el volumen de un tetraedro (no necesariamente regular) cuyas
aristas coterminales coinciden con los vetores u, v, w es igual a wvu 6
1.
Demuestre que las áreas vectoriales de las cuatro caras están dadas por:
)(21
1 wvS , ..... , )()(21
4 vwvuS
Demuestre, finalmente, que S1 + S2 + S3 + S4 = 0.
55) Demuestre que nvu es el área del paralelogramo cuyos lados
coterminales coinciden con los vectores u y v y está proyectado sobre un
plano perpendicular a n.
56) Dados los vectores fijos a, b y c, encuentre el vector v que satisface:
0, av bcbv
tal que 0 ba . ¿Es la solución encontrada única?
57) Un espacio vectorial n-dimensional V es generado por el conjunto de vectores
base {k1, k2, ..., kn} (ver problema 11). En el espacio de puntos Euclideano
correspondiente En
se define el sistema de coordenadas {y1, y
2, ..., y
n}, de tal
manera que el vector r que une el origen con el punto de coordenadas (y1, y2,
..., yn) queda expresado por r = yiki. Dado un nuevo sistema de coordenadas
{x1, x
2, ..., x
n}, tal que existe una única transformación invertible:
xi = xi (y1, y2, ..., yn) , i=1, n
demuestre que los n vectores:
iix
ve
constituyen también una base para V.
58) Encuentre la solución general de las siguientes ecuaciones vectoriales,
usando solo operaciones vectoriales simbólicas, donde x (x e y) es(son)
el(los) vector(es) incógnita(s):
a) 0 xbxx ,
b) 0 yyxx

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 61/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
61
c) dyx , yx
d) dyx , cyx
donde , , son escalares (reales) fijos y b, c, d son vectores fijos.
59) Usando vectores, demuestre que:
wcvcuc
wbvbub
wavaua
wvucba det,,,,
60) Sea V el espacio Euclideano tridimensional, y BT = [i j k] la base canónica
para V. Considere:
B1 =
k ji
ji
ji
=B y
k-
ji
ji
2)3(2
1
)3(
2
1
a) Demuestre que B1 es una base cartesiana para V (señale si es derecha o
izquierda), mientras B2 es una base oblicua,
b) Determine la base dual de B1 y de B2 y expanda v = i+ j+2 k en términos
de B2
y de su base dual
61) Sea V el espacio Euclideano tridimensional e [i j k]T la base canónica para
V. Considere:
B =
ki
k j
ji
a) Demuestre que B es una base oblicua para V,
b) Determine la base dual de B y expanda el vector v = 3i+2 j+k en
términos de B y de su base dual
c) Determine las matrices métricas [gij] y [gij]
62) Sea V el espacio Euclideano tridimensional. Considere:

5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 62/63
MECANICA RACIONAL MODERNA – Volumen I – Fundamentos Matemáticos
62
B =
*3
*2
*1
3
2
1
y
e
e
e
=B
e
e
e*
dos bases (cartesianas), donde la base B* se obtuvo a partir de la base B,
mediante un giro de ésta de 30º, en sentido antihorario y con respecto al eje
x3.
a) Calcule la matriz de transformación [Q] y verifique por cálculo directo
su ortogonalidad,
b) Exprese v = 3e1+5e2+6e3 en términos de B*
63) Sea V el espacio Euclideano tridimensional, y BT = [i j k] la base canónica
para V. Considere:
B1 =
ki
k j
ji
=B y
k ji
k ji
ji
2
)(3
1
)2(6
1
)(2
1
a) Demuestre que B1 es una base cartesiana para V (señale si es derecha o
izquierda), mientras B2 es una base oblicua,
b) Determine la base dual de B2 y expanda v = i+2 j+k en términos de B2 y
de su base dual
c) Encuentre la matriz de transformación asociadas con las bases B y B1 y
verifique su ortogonalidad
d) Usando el proceso de ortonormalización de Gram-Schmidt construya
una base cartesiana a partir de B2.
64) Sea V el espacio Euclideano tridimensional y BT
= [i j k] la base canónica
para V. Sean:
u = 4i - 2 j + 3k, v = 2i + 7 j + k y w = 5i - 2 j + 7k,
tres vectores. Calcule los valores de las siguientes operaciones:
5/13/2018 (02) capitulo_2_(espacios_vectoriales) - slidepdf.com
http://slidepdf.com/reader/full/02-capitulo2espaciosvectoriales 63/63
MECANICA RACIONAL MODERNA – VOLUMEN I – FUNDAMENTOS MATEMÁTICOS
63
a) u v, u w y v w,
b) u v, u w, v w, v u, w u y w v,
c) (u v) w y u (v w)
d) [u , v , w ], [u , w , v ], [w , v , u ], [w , u , v ] y [v , w , u ]
e) el volumen del paralelepípedo formado por u, v y w
f) el área de los paralelogramos generados por u y v, v y w, u y w
g) (u v) (u w)
65) Sea V= 4, el conjunto S1=(1,2,3,6), (4,-1,3,6), (5,1,6,12) y el conjunto
S2=(1,-1,1,1), (2,-1,4,5). Encuentre una base para la intersección de los
subespacios generados por los dos conjuntos dados.





























