Embed Size (px)
Citation preview
UNIVERSIDAD DE SEVILLA
ESCUELA SUPERIOR DE INGENIEROS
Departamento de Matemática Aplicada II
Métodos de asignación de los costes de limpieza
de un río y del reparto de agua
Carlos Albert García
PROYECTO FINAL DE CARRERA
Tutora: Dra. Encarnación Algaba Durán
Sevilla, Diciembre 2012


Índice
Sumario............................................................................................................................vi
Capítulo 1..........................................................................................................................2Teoría de Juegos Cooperativos..........................................................................................2
1.1 Introducción.............................................................................................................21.2 Juegos Cooperativos................................................................................................31.3 Conceptos de solución de juegos cooperativos.....................................................12
1.3.1 El core............................................................................................................121.3.2 Valores en juegos cooperativos......................................................................17 1.3.2.1 El valor de Shapley...................................................................................20 1.3.2.2 El valor Shapley ponderado....................................................................23
1.4 Conceptos básicos sobre grafos.............................................................................24
Capítulo 2........................................................................................................................282.1 Introducción...........................................................................................................282.2 El modelo..............................................................................................................322.3 Caracterización de los métodos LRS, UES y DES.................................................37
2.3.1 Caracterización del método LRS....................................................................372.3.2 Caracterización del método UES....................................................................402.3.3 Caracterización del método DES....................................................................47
2.4 Problemas con estructura tipo línea.......................................................................542.4.1 Introducción....................................................................................................552.4.2 El modelo.......................................................................................................562.4.3 Caracterización del método LRS....................................................................582.4.4 Caracterización del método UES....................................................................602.4.5 Observación sobre el método DES.................................................................65
2.5 Comentarios...........................................................................................................652.5.1 Reconsideraciones a los métodos LRS y UES................................................652.5.2 Axiomatización sin aditividad........................................................................65
Capítulo 3........................................................................................................................683.1 Introducción...........................................................................................................683.2 El modelo..............................................................................................................713.3 Caracterización......................................................................................................723.4 Otros resultados.....................................................................................................76

Capítulo 4........................................................................................................................804.1 Introducción...........................................................................................................804.2 Israel: Río y Puerto Kishon, mar mediterráneo.....................................................81
4.2.1 Objetivo de la Aplicación...............................................................................854.2.2 Modelado del problema..................................................................................864.2.3 Resolución analítica.......................................................................................87 4.2.3.1 Resolución usando el método LRS..........................................................88 4.2.3.2 Resolución usando el método UES..........................................................89 4.2.3.3 Resolución usando el método DES..........................................................92 4.2.3.4 Resolución a través de la utilización de un sistema de pesos...................94 4.2.3.5 Resolución usando el ratio de biodegradabilidad. Sistema de pesos.......994.2.4 Comentarios de las soluciones obtenidas.....................................................1044.2.5 Alcance del proyecto....................................................................................107
4.3 Restauración del entorno ecológico del lago Bai Yang Dian..............................1134.3.1 Una breve reseña..........................................................................................1134.3.2 Soluciones analíticas....................................................................................1164.3.3 Comentarios..................................................................................................121
Capítulo 5......................................................................................................................1245.1 Introducción.........................................................................................................1245.2 El problema de reparto de agua en un río............................................................1275.3 Caracterización de las reglas de reparto secuencial............................................1295.4 Propiedades.........................................................................................................1335.5 Aplicación...........................................................................................................135
5.5.1 Presentación del problema............................................................................1355.5.2 Métodos de reparto secuencial: resolución analítica....................................136 5.5.2.1 Método de reparto proporcional (PRO)..................................................136 5.5.2.2 Método de reparto de beneficios equitativos (CEA)..............................138 5.5.2.3 Método de reparto de pérdidas equitativas (CEL)..................................139 5.5.2.4 Método de reparto de la regla del Talmud (TAL)...................................1415.5.3 Análisis de sensibilidad................................................................................143 5.5.3.1 Análisis de sensibilidad: Demanda incrementada..................................144 5.5.3.2 Análisis de sensibilidad: Dotación incrementada...................................1475.5.4 Comparación de los métodos secuenciales con sus alternativas..................150

5.5.4.1 Comparación con los problemas de reparto de Ambec y Sprumont .....150 5.5.4.2 Comparación con los problemas de bancarrota sin dotación.................1515.5.5 Análisis de resultados, discusión y conclusiones.........................................152
5.6 Estado del arte: Líneas actuales de negociación.................................................1545.6.1 Introducción..................................................................................................1545.6.2 Problemas de ríos con funciones de beneficio cóncavas..............................1565.6.3 Soluciones analíticas....................................................................................163 5.6.3.1 La solución incremental aguas abajo......................................................163 5.6.3.2 La solución incremental aguas arriba.....................................................164 5.6.3.3 La solución aguas abajo.........................................................................166 5.6.3.4 La solución aguas arriba.........................................................................1685.6.4 Comparaciones y conclusiones de las cuatro soluciones.............................172
Referencias....................................................................................................................176


Sumario
Este proyecto final de carrera es un documento basado en la conocida teoría de
juegos cooperativos y ha sido titulado “Métodos de asignación de los costes de
limpieza de un río y del reparto de agua”. Ha sido realizado bajo la dirección de Dª.
Encarnación Algaba Durán, en el Departamento de Matemática Aplicada II de la
Universidad de Sevilla.
Como es bien sabido, la teoría de juegos cooperativos es muy extensa y su
campo de aplicación encierra gran variedad de ejemplos. En este proyecto nos vamos a
centrar especialmente en dos aplicaciones. La primera va a consistir en el reparto de los
costes de limpieza de los contaminantes de un río, entre una serie de agentes que están
instalados en el curso de la red fluvial y que contribuyen a la contaminación del
afluente. No nos centraremos en las distintas formas de eliminar los residuos frente a un
tipo de contaminación u otra. Vamos a focalizar en el reparto del coste total que
conlleva la operación de limpieza de contaminantes, entre el conjunto de agentes
involucrados, para una serie de casos y siguiendo métodos diferentes. Resolveremos
este problema para estructuras típicas de un río cualquiera, la estructura tipo árbol y
particularizaremos, por su especial interés, en la de tipo línea.
En el segundo bloque del proyecto nos centraremos en el reparto del agua de un
río entre una serie de poblaciones que están instaladas en su curso que demandan una
cierta cantidad de agua para cubrir las necesidades de la población, ya sean de tipo
doméstico, destinadas a regadío o a uso industrial. En particular, estudiaremos el caso
en el que la demanda total es superior al recurso procedente del río. Es en este caso,
cuando la teoría de juegos cooperativos juega un papel primordial, para establecer un

reparto del recurso de la forma más justa posible, con el objetivo de garantizar la mejor
calidad de vida para todos los habitantes.
A continuación, describimos los diferentes aspectos a tratar en cada uno de los
cinco capítulos del presente proyecto.
En el Capítulo 1 introducimos las bases de la teoría de juegos cooperativos con
diferentes ejemplos orientativos. Destacamos los conceptos de solución que vamos a
tratar y que son el core, el valor de Shapley y el valor de Shapley ponderado. Al final
del capítulo mencionamos algunos conceptos sobre la teoría de grafos que van a ser
útiles para la mejor comprensión de éstos cuando aparezcan más adelante.
El Capítulo 2 tiene una gran relevancia dentro del proyecto. Primero veremos
una reseña sobre la situación actual en las disputas de negociación entre agentes,
explicando de forma breve cuales son las principales doctrinas o teorías que se usan. En
esta parte, nos centraremos en el estudio teórico de tres métodos de reparto. El primero
denominado Local Responsability Sharing o método LRS. El segundo método es
conocido como Upstream Equal Sharing o método UES. Por último, describiremos el
método denominado Downstream Equal Sharing o método DES. En la primera parte del
capítulo desarrollaremos el modelo del problema planteado, así como la caracterización
axiomática de cada uno de los métodos para el tipo de estructura de un río conocido
como tipo árbol. En la segunda parte del capítulo analizaremos un caso particular de
interés, la estructura de río más simple, denominada estructura tipo línea. Al igual que
realizamos con la estructura tipo árbol, para la de tipo línea estableceremos el mismo
esquema, un modelo específico y la caracterización axiomática de cada uno de los
métodos mencionados anteriormente.
En el Capítulo 3 analizaremos teóricamente un nuevo método que se diferencia
de los métodos introducidos en el Capítulo 2. Primero describiremos un modelo
específico con la correspondiente axiomatización del método. A partir de un sistema de
pesos, la asignación del vector de costes es computada fácilmente. En la última parte del
capítulo, introducimos el concepto de ratio de biodegradabilidad.
El Capítulo 4 es un tema dedicado a aplicaciones prácticas. De hecho,
analizaremos dos ejemplos reales usando los métodos anteriores. La primera aplicación
va a consistir en realizar el reparto o asignación de los costes de limpieza de
contaminantes de un río fuertemente afectado en la actualidad: el río Kishon donde la
estructura de dicho afluente es de tipo línea. Así pues, en esta aplicación vamos a
establecer un modelo aproximado del río y aplicaremos los métodos LRS, UES, DES,
sistema de pesos y el concepto de ratio de biodegradabilidad computando finalmente la
asignación de costes. La segunda aplicación considerada es un ejemplo sobre un
proyecto a cargo del Asian Development Bank (ADB) en China, con estructura tipo
árbol. El objetivo del proyecto es restaurar el entorno ecológico de un lago muy
contaminado, el lago Bai Yang Dian en la provincia de Hebei, al norte de China. Para
esta aplicación utilizaremos nuevamente todos lo métodos estudiados hasta el momento.
Al final, dada la filosofía de nuestro problema, destacaremos los métodos LRS y sistema
de pesos como los más eficientes en el reparto de costes.
En el Capítulo 5 trataremos el reparto del agua entre una serie de agentes
situados a lo largo del cauce de un río, bajo el supuesto que la oferta de agua
proporcionada por el afluente sea inferior a la cantidad de recurso demandado por las
poblaciones destinado a cubrir todas sus necesidades. Para ello, usaremos las reglas de
reparto secuencial. Así, en este capítulo, primero estudiaremos los fundamentos teóricos
sobre las reglas de reparto secuencial y nos centraremos en cuatro métodos: método de
reparto proporcional (PRO), método de reparto de beneficios equitativos (CEA), método
de reparto de pérdidas equitativas (CEL) y método de reparto de la regla del Talmud
(TAL). Analizaremos cada uno de ellos, así como las ventajas e inconvenientes que
poseen unos frente a los otros ya que, como veremos, el método CEL favorece a los
agentes que más demandan, el método CEA a los que menos necesitan y el método TAL
se encuentra en una situación intermedia. Por su parte, el método PRO asigna un reparto
proporcional a cada agente. Todo esto quedará reflejado en una aplicación ejemplo.
Finalmente, se realiza una revisión sobre el estado del arte, es decir, las líneas más
recientes o actuales sobre la negociación entre agentes en el reparto del agua de un río.


Capítulo 1
Teoría de Juegos Cooperativos
1.1 Introducción
La Teoría de Juegos es una rama de las matemáticas relativamente moderna que
estudia problemas de decisión en los que interaccionan varios decisores. Aunque la
teoría de juegos fue fundada por von Neumann (1928), algunos matemáticos como
Zermelo (1913) o Borel (1921) ya anticiparon las bases de esta disciplina.
Concretamente, el punto de partida para la Teoría de Juegos fue la publicación del
tratado Theory of Games and Economic Behavior (1944) por el propio von Neumann
junto con el economista Morgenstern.
Todo el trabajo posterior que se ha llevado a cabo en Teoría de Juegos está
fuertemente influenciado por esta obra, en la que se definen las bases de lo que hoy en
día es conocida como Teoría de Juegos clásica. Ya en los años cincuenta, Nash
profundiza en la Teoría de Juegos estableciendo algunos de los conceptos más
importantes para una gama más amplia de juegos, y en los años setenta, investigadores
como Selten y Harsanyi (1994) desarrollan los conceptos que permitirán la aplicación
con éxito de la Teoría de Juegos a la economía y otras disciplinas. En la actualidad, los
métodos de esta disciplina se aplican con éxito a un gran número de campos como la
economía, la biología, la sociología o las ciencias políticas. El gran impacto que la

Teoría de Juegos ha tenido sobre la Economía queda reflejado en el hecho de que se le
haya concedido el Premio Nobel de economía a tres de los matemáticos que fundaron
las bases de la Teoría de Juegos aplicada a la economía: Nash, Selten y Harsanyi.
La Teoría de Juegos distingue dos modelos de juegos en su planteamiento. En los
juegos no cooperativos o competitivos, cada jugador busca su máximo beneficio,
prohibiéndose expresamente cualquier tipo de acuerdos previos entre jugadores. Esta
rama de la Teoría de Juegos estudia las diferentes estrategias que pueden emplear cada
uno de los jugadores, y en los juegos de esta categoría existe una función de pagos
asociada a cada jugador, la cual depende de las diferentes estrategias que se empleen.
En los juegos cooperativos, los jugadores disponen de mecanismos que les permiten
tomar acuerdos vinculantes previos al juego. Esto es, los jugadores pueden cooperar
formando coaliciones de jugadores con el fin de obtener mayores beneficios. En un
juego cooperativo no es necesario analizar las estrategias de los jugadores, puesto que
éstos actuarán de la forma que consigan mayor beneficio. El problema central es el
reparto de beneficios entre los jugadores que forman la coalición. Dado que los
jugadores han cooperado entre sí para obtener el máximo beneficio, el reparto de ese
beneficio ha de darse entre todos los jugadores que formaron la coalición. El objetivo
principal de la Teoría de Juegos Cooperativos es analizar la importancia o influencia
que ha tenido cada jugador en la obtención de ese beneficio, para proponer un reparto de
beneficios adecuado.
1.2 Juegos Cooperativos
Como ya comentamos en el apartado anterior, los Juegos Cooperativos se
caracterizan por el hecho de que los jugadores pueden cooperar entre ellos para buscar
un beneficio común. Una cuestión importante en la Teoría de Juegos Cooperativos es
que en el momento en que varios jugadores deciden cooperar en algún sentido, debe
formarse una coalición entre estos jugadores. Los jugadores de esta coalición, en el
momento en que se forma, actuarán buscando el máximo beneficio posible para la
coalición. Una coalición puede estar formada por cualquier grupo de jugadores de
cualquier tamaño. El pago de esta coalición, esto es, los beneficios que la coalición
obtendrá del juego, será función de la coalición, y deberá ser repartido al finalizar el
juego entre los jugadores que forman la coalición. Este pago será representado por un

número. Cuando cualquier reparto del pago entre los jugadores es posible, hablamos de
un juego de Utilidad Transferible o abreviadamente juego UT.
Definición 1.1 Un juego cooperativo de utilidad transferible en forma coalicional o
en forma de función característica está formado por:
- Un conjunto finito de jugadores denotado por N= {1,2, …, n }.
- Una función característica v :2N → R que asocia a cada subconjunto S de N (o
coalición) un número real v ( S ) (valor de la coalición), siendo v (∅ )=0.
Por tanto, denotaremos a un juego cooperativo UT como ( N , v ) donde tanto N
como v deben estar especificados. Notar que la única restricción que imponemos a la
función característica es que a la coalición formada por el conjunto vacío de jugadores
le asignemos un pago nulo.
Ejemplo 1.1 Tres empresas de una localidad deciden acudir a los servicios de una
consultora energética para poder reducir sus gastos anuales sobre consumo de
electricidad. La empresa consultora ofrece un descuento adicional si acuden a ella al
menos tres empresas de tal forma que el coste de cada una de las posibilidades lo vamos
a representar en la siguiente tabla
COALICIÓN COSTE (miles de €)
{1} 10
{2} 10
{3} 10
{1,2} 20
{1,3} 20
{2,3} 20
{1,2,3} 24
Tabla 1.1

Esta situación puede modelarse mediante un juego cooperativo de utilidad
transferible ( N ,v ), donde N={1,2,3 } y la función característica v del juego viene
expresada por:
v ( {1 } )=v ( {2 } )=v ( {3 } )=0 ,
v ( {1,2 } )=v ( {1,3 } )=v ( {2,3 } )=0 ,
v ( {1,2,3 })=6.
Comentemos algunos detalles de este ejemplo. Es un juego cooperativo porque los
distintos jugadores no compiten entre ellos, sino que están dispuestos a cooperar para
obtener un beneficio común. En realidad lo que buscan es que la consulta energética
salga lo más barata posible. Por otro lado, es importante entender que la función v no
representa el gasto, sino el beneficio que los jugadores obtienen, en este caso, el ahorro
que conseguirán compartiendo la consulta, respecto al coste que tendría cada una de
forma individual. Y por último, señalar también que en ningún momento la función
característica v define cómo han de repartirse esos beneficios. En este caso parece
lógico que el reparto razonable sería que cada uno pagase 8.000€, repartiendo los
beneficios entre los tres de manera equitativa, pero vamos a ver que no siempre es tan
sencillo con el siguiente ejemplo.
Ejemplo 1.2 Consideremos el mismo caso del ejemplo anterior. En este caso, vamos a
suponer que las empresas son muy distintas unas de otras y, además, los dueños de la
empresa 1 y la consultora energética mantienen una relación de amistad ofreciéndole
siempre un descuento adicional a dicha empresa. Así pues, los costes se reflejan en la
siguiente tabla

COALICIÓN COSTE (miles de €)
{1} 10
{2} 11
{3} 14
{1,2} 20
{1,3} 21.6
{2,3} 25
{1,2,3} 32
Tabla 1.2
Esta situación puede modelarse nuevamente mediante un juego cooperativo de
utilidad transferible ( N , v ), donde N={1,2,3 } y la función característica v del juego
viene expresada por
v ( {1 } )=v ( {2 } )=v ( {3 } )=0 ,
v ( {1,2 } )=1 v ( {1,3 } )=2.4 v ( {2,3 })=0 ,
v ( {1,2,3 })=3.
Vemos que ahora el caso no es tan sencillo. Suponiendo que las tres empresas
cooperen y decidan asistir a la consultora de manera conjunta, ¿cuál sería el reparto de
beneficios óptimo? Si, como en el ejemplo anterior, repartimos los beneficios entre los
tres, cada uno obtendría un beneficio de 1000€ pero, ¿Por qué deberían cooperar 1 y 3
con 2 para llevarse un beneficio de 1000€, cuando si cooperan ellos solos se llevarían
2400€ a repartir entre los dos? En este caso, la empresa 2 debe acudir a la consultora de
forma independiente obteniendo un beneficio nulo. ¿Debe la empresa 2 ceder en el
reparto de beneficios para que las empresas 1 y 3 prefieran cooperar con él, para así
llevarse al menos algo de beneficio? Como queda claro en este ejemplo, no solo la
función característica v no fija un reparto de pagos entre los jugadores de una coalición,
sino que el mayor problema de este tipo de juegos es precisamente el reparto de pagos
entre los miembros de una coalición.

Normalmente, las propiedades que tenga la función característica v
correspondiente a un juego cooperativo ( N ,v ) son las que cualifican y dan nombre al
juego. Así, dependiendo de las propiedades de sus funciones características, tenemos
una gran variedad de juegos cooperativos.
Definición 1.2 Se dice que un juego ( N ,v ) es monótono si ∀ S ,T ⊆N , con S⊆T , se
verifica que
v ( S ) ≤ v (T ) .
Es decir, un juego cooperativo es monótono cuando al crecer el número de
jugadores que forman una coalición el beneficio o pago de esta coalición no disminuye.
No hay jugadores que resten beneficios, o que hagan a la coalición obtener menos
beneficio. En la mayoría de aplicaciones de la Teoría de Juegos se les exige a los juegos
ser monótonos.
Definición 1.3 Se dice que un juego ( N ,v ) es superaditivo si ∀S ,T ⊆N , con S ∩T=∅
, se verifica que
v ( S )+v (T ) ≤ v ( S∪T ) .
Es decir, si dos coaliciones disjuntas deciden unirse para formar una coalición
mayor, el beneficio de la nueva coalición será igual o superior que la suma de los
beneficios de las coaliciones originales.
Si la desigualdad de la definición anterior se da en sentido opuesto se dice que el
juego es subaditivo. Por tanto, un juego ( N ,v ) es subaditivo si ∀ S ,T ⊆N , con
S ∩T=∅ , se verifica que
v ( S )+v (T ) ≥ v ( S∪T ) .

Definición 1.4 Se dice que un juego ( N ,v ) es convexo si ∀S ,T ⊆N , se verifica que
v ( S )+v (T ) ≤ v ( S∪T )+v (S∩T ) .
De forma más intuitiva esta inecuación se expresa de la forma
v ( S∪T )≥ v (S )+v (T )−v ( S ∩T ) .
Si la desigualdad se da en sentido opuesto se dice que el juego es cóncavo. Es
decir, un juego es cóncavo si
v ( S∪T )≤ v (S )+v (T )−v ( S ∩T ) .
Definición 1.5 Se dice que un juego ( N ,v ) es 0-normalizado si se verifica que
v ( {i } )=0 ,∀ i∈ N .
Nótese que en los juegos 0-normalizados, los jugadores están obligados a cooperar entre
ellos, porque solos obtendrán un beneficio nulo.
Presentamos a continuación dos familias de juegos muy importantes dentro de los
juegos cooperativos UT, los juegos de unanimidad y los juegos de identidad. En
general, denotamos por Γ N al conjunto de todos los juegos cooperativos de utilidad
transferible sobre N ; es decir,
Γ N={( N ,v ): v :2N → R , v (∅ )=0 } .
En este conjunto Γ N se introducen las siguientes operaciones

+: Γ N × Γ N → Γ N , ( v ,w ) → v+w ,
•: R × Γ N → Γ N , (α ,v ) → α ⋅v .
Definidas para cualquier S⊆N por
( v+w ) (S )=v (S )+w (S )( v+w ) (S )=v (S )+w (S ) .
Con respecto a estas operaciones, la terna ( Γ N ,+, • ) constituye un espacio
vectorial (2N−1 )-dimensional. Una base de este espacio vectorial está formada por el
conjunto
{uT∈Γ N :T⊆N ,T ≠∅ }.
Siendo, para cadaS⊆N , uT ( S ) definido por
uT ( S )={ 1 , si T⊆ S ,0 , en otro caso .
Estos juegos uT se denominan juegos de unanimidad. Los juegos de
unanimidad no constituyen la única base del espacio vectorial Γ N, siendo otra base la
formada por los llamados juegos de identidad, denotados, para cada T⊆N , T ≠∅ , por
δT y definidos, para cada S⊆N , por
δT (S )={ 1, siT=S ,0 , enotrocaso .
Como hemos comentado, un juego de utilidad transferible o juego UT se
caracteriza porque cualquier reparto del beneficio total de la coalición entre los
jugadores que la forman está permitido. Por tanto, al analizar un juego cooperativo, un
objetivo podría ser conocer las estrategias que deben tomar los diferentes jugadores, y
conocer el beneficio que obtendría cada jugador si decidiese formar una coalición con
otros jugadores. Este objetivo es demasiado ambicioso para cualquier juego que

pretenda modelar un problema de la vida real. En los problemas que se suelen modelar
mediante la teoría de juegos, intervienen muchos factores en la toma de decisiones, es
decir, en las coaliciones que se forman y en cómo se reparten finalmente los beneficios.
Estas decisiones dependen de variables como la capacidad de negociación, la habilidad
de los jugadores, o las presiones de tipo social. Por tanto, es muy difícil modelar
exactamente cada relación, cada afinidad de cada jugador con el resto, para encontrar un
modelo completo de una negociación.
A la hora de buscar resultados posibles, debe hacerse un reparto del pago total
v ( N ) entre los jugadores. El pago a cada jugador puede representarse mediante una
función x que a cada jugador del conjunto N le asigne un número real que represente el
pago que obtendrá ese jugador en el juego. Esta función puede expresarse mediante el
vector de pagos x=( x1 , x2 , …,x N ) donde x i representa el pago al jugador i.
A la hora de usar los juegos cooperativos UT para modelar situaciones de la vida
real, existen una serie de restricciones lógicas para el vector de pagos:
Para que los jugadores acepten la distribución de beneficios propuesta por el
vector de pagos, tienen que recibir un pago superior al que recibirían si jugasen solos.
Este es el llamado principio de individualidad racional:
x i≥ v ( {i } ) ,∀ i=1,2 ,…,n .
Una coalición o conjunto de jugadores que pudiese obtener un pago cooperando,
también exigirá de un vector de pagos un beneficio mayor al que obtendría formando la
coalición. De manera análoga al principio de individualidad racional, tenemos la
condición de racionalidad de grupo o, también llamada, condición de optimalidad de
Pareto:
∑i∈ S
x i=x (S ) ≥ v ( S ) .
Suponiendo que todos los jugadores llegan a un acuerdo, formando la gran
coalición N , el beneficio total de esa gran coalición viene representado por v ( N ). Si al

finalizar el juego reciben el vector de pagosx=( x1 , x2 , …, x N ), este vector de pagos
satisface el principio de eficiencia cuando
∑i∈N
x i=v ( N ) .
Este principio impone que, si se forma la gran coalición N , el beneficio de la
misma será repartido en su totalidad por los miembros que la forman.
Los vectores x∈ RN que cumplen el principio de eficiencia son llamados vectores
de pagos eficientes o pre-imputaciones para el juego( N ,v ).
Podemos por tanto definir el conjunto de pre-imputaciones de un juego ( N ,v )
como el conjunto de vectores de distribución de pagos
PI ( N , v )= {( x1 , x2 ,…, xn )∈Rn : x ( N )=v ( N ) },
dondex (N )=∑i∈N
xi.
Como vemos, el conjunto de pre-imputaciones no es más que el conjunto de todos
los vectores de pagos que cumplen el principio de eficiencia. Si además de este
principio, imponemos que los vectores de pagos cumplan el principio de individualidad
racional, obtenemos el conjunto de imputaciones de un juego ( N ,v )
I ( N , v )={( x1 , x2 ,…,xn )∈PI ( N , v ) : x i≥ v ( {i } ) ,∀ i=1 , …, n}
¿ {(( x1 , x2 , …, xn )∈Rn : x ( N )=v ( N ) , ) x i≥ v ( {i } ) ,∀ i=1 , …, n}.
Se dice que el juego ( N ,v ) es esencial si se verifica que I ( N , v ) ≠∅ .

1.3 Conceptos de solución de juegos cooperativos
Introducidos ya algunos conceptos propios de los juegos cooperativos, podemos
preguntarnos ahora cuál de todos los posibles vectores de pagos será aceptado por todos
los jugadores. Existen dos tipos de conceptos de solución en juegos cooperativos. Los
conceptos de solución de tipo conjunto, que limitan un conjunto de posibles valores
exigiéndole algunas propiedades, y los conceptos de solución de tipo puntual, que eligen
entre todos los posibles vectores de pago uno solo. Presentaremos a continuación uno de
los conceptos más importantes dentro de la Teoría de Juegos, el core, que es un
concepto de solución de tipo conjunto. Posteriormente, estudiaremos dos de los
conceptos de solución de tipo puntual más interesantes y utilizados en Teoría de Juegos
Cooperativos: los valores de Shapley y de Shapley ponderado.
1.3.1 El core
Aunque en un juego UT todos los vectores de pago posibles podrían ser aceptados,
suelen imponerse a las posibles soluciones algunas restricciones razonables. Si le
exigimos al vector de pagos que cumpla el principio de eficiencia, el conjunto de
posibles soluciones se reduce al conjunto de pre-imputaciones. Atendiendo a esta idea,
en las soluciones de tipo conjunto se define una solución o concepto de solución sobre
una colección no vacía de juegos como una aplicación ψ que asocia a cada juego
cooperativo ( N , v ) de dicha colección un subconjunto ψ (v ) del conjunto de pre-
imputaciones.
Dentro de los diversos conceptos de solución en la Teoría de Juegos, uno de los
más importantes es el core. Sea ( N ,v ) un juego cooperativo, donde N= {1,2, …,n }, y v
la función característica que describe el juego. Como hemos dicho, se desea extraer un
subconjunto, del conjunto de pre-imputaciones, de vectores de pagos que los jugadores
estén dispuestos a aceptar. Si, además de exigirle que cumplan el principio de eficiencia,
requerimos a los vectores de pago que cumplan el principio de racionalidad individual,
hablamos de extraer un subconjunto de vectores del conjunto de imputaciones I .
Podemos extender el principio de racionalidad individual mediante el principio de

racionalidad coalicional, llegando entonces al concepto de core de un juego
cooperativo.
Definición 1.6 El core de un juego ( N , v )es el conjunto de vectores de pagos
C ( N , v )={( x1 , x2 , …,xn )∈Rn : x ( N )=v ( N ) , x (S ) ≥ v ( S ) , ∀S⊆N } .
El core, por tanto, es el conjunto de vectores de pagos que ofrece a cada coalición
que puede formarse sobre N un beneficio, al menos, igual que el que esta coalición
puede conseguir por sí misma. Por tanto, los elementos del core son aceptables para
todas las coalicionesS⊆N . Intuitivamente, vemos que esto es una solución para el
juego( N , v ). Un reparto de pagos que satisface a todos los jugadores y a todas las
posibles coaliciones. El core de un juego cooperativo satisface, además, interesantes
propiedades matemáticas. Aunque no profundizaremos en ellas, nombramos aquí las
propiedades del core de un juego( N ,v ).:
Sea ( N ,v ) un juego cooperativo. El conjunto C ( N , v ) es cerrado, acotado y
convexo.
Esta idea del core de un juego fue introducida por Gillies (1953), y pueden darse
ejemplos de juegos en los que el core es vacío. Por lo tanto, para esos juegos, no se
podría obtener un vector de pagos con el que todos los jugadores o posibles coaliciones
se viesen beneficiados. No obstante, hay clases de juegos cooperativos de utilidad
transferible para los que el core es no vacío. Dentro de estas clases, se destaca el
conjunto de juegos convexos.
Dado que el core nos da una solución para un juego cooperativo, y que existen
juegos con el core vacío, es un objetivo importante de la Teoría de Juegos Cooperativos
caracterizar los juegos cooperativos con el core no vacío. A este respecto, Shapley
(1967) introdujo el concepto de coaliciones equilibradas y de juego equilibrado.
Definición 1.7 Dado un juego( N ,v ), una colección ( S1 , S2, …, Sm ) de subconjuntos de N
, distintos y no vacíos, se dice que es equilibrada sobre N si existen números positivos
α 1 , α 2 ,…,α m (denominados pesos) tales que, para todo i∈N ,
∑{ j∈S }
α j=1 .

Si, para cualquier colección equilibrada sobre N , se verifica que
∑j=1
m
α j v ( S j ) ≤ v (N ) ,
entonces se dice que el juego ( N ,v ) es equilibrado.
Bondareva (1963) y Shapley (1967) demostraron que la clase de juegos
equilibrados coincide con la clase de juegos con core no vacío.
Un juego ( N ,v ) se dice totalmente equilibrado si los subjuegos ( S , v S ) son
equilibrados para toda S⊆N , S ≠∅ . Aquí, se entiende por subjuego inducido ( S , v S )
aquel cuya función característica viene determinada por
vS (T )=v (T ) ,∀T ⊆S .
Ejemplo 1.3 Tres empresas papeleras tienen que limpiar el río donde van a parar sus
vertidos. Si cooperan las tres juntas con una única empresa limpiadora, se ahorran
400.000€. Si cooperan las empresas 1 y 2 por separado se ahorran 100.000€, si
cooperan 1 y 3 se ahorran 200.000€ y, finalmente, si cooperan 2 y 3 se ahorran
300.000€ Si dos de los jugadores cooperan para realizar el trabajo, el que se queda fuera
no gana nada. Esta situación puede modelarse mediante un juego cooperativo, con la
siguiente función característica. Los resultados se van a expresar en miles de euros.
v ( {1 } )=v ( {2 } )=v ( {3 } )=0 ,
v ( {1,2 } )=100 v ( {1,3 } )=200 v ( {2,3 } )=300 ,
v ( {1,2,3 })=400.
Finalmente las tres emperesas deciden cooperar juntos para ahorrarse 400.000€,
pero no se ponen de acuerdo en cómo repartir los beneficios. ¿Cómo deberían repartirse
los beneficios las tres empresas? Justificar la respuesta.
Se debe verificar que x1+ x2+x3=400.

El core, en general, no nos dará un reparto único válido, pero sí acotará los
posibles valores que se podrían tomar sin que ningún jugador se viese perjudicado por la
elección.
Pertenecen al core de este juego los puntos ( x1 , x2 , x3 ) que satisfagan las siguientes
restricciones:
x1+ x2+x3=400, (principio de eficiencia)
x1≥ 0 , x2 ≥ 0 , x3 ≥0, (racionalidad individual)
x1+ x2 ≥ 0 , x2+x3≥ 0 , x3+x1≥ 0, (racionalidad coalicional)
Si representamos gráficamente esas restricciones
Figura 1.1
Como vemos, el core corresponde a los puntos que caen dentro de la región
rallada. En este caso, hablamos de un core no vacío y no puntual.
Si modificamos el ejemplo con la siguiente función característica
v ( {1 } )=v ( {2 } )=v ({3 } )=0
v ( {1,2 } )=200 v ( {1,3 } )=300 v ( {2,3 } )=300
v ( {1,2,3 })=400.
(0,0,400)(0,400,0)
(400,0,0)
1 3 200x x 1 2 100x x
2 3 300x x

El resultado es
Figura 1.2
Con lo cual el core incluye un sólo punto, que será la solución al problema.
Reformulando las condiciones queda:
x1+ x2+x3=400 ,
x1+ x3=300→ x2=100 ,
x1+ x2=200→ x3=200 ,
x2+ x3=300→ x1=100.
Y ese es precisamente el punto que forma el core. El vector de pagos sería
x=(100,100,200 ). Cualquier pago superior a un jugador implicaría que los otros dos se
reparten menos beneficio, e incumpliría el principio de racionalidad coalicional.
Si modificamos una última vez la función característica, podemos ver un ejemplo
de juegos con core vacío.
v ( {1 } )=v ( {2 } )=v ( {3 } )=0 ,
v ( {1,2 } )=300 v ( {1,3 } )=300 v ( {2,3 } )=300 ,
v ( {1,2,3 })=400.
(0,0,400)(0,400,0)
(400,0,0)
1 3 300x x 1 2 200x x
2 3 300x x

Figura 1.3
A partir de la representación gráfica del problema vemos que el core no incluye
ningún punto. Es decir, no hay ningún posible reparto de beneficios que satisfaga a
todos los jugadores. Observando la función característica, era de esperar. Las
coaliciones formadas por dos jugadores cualesquiera obtienen un beneficio de 300.
Dada la simetría entre jugadores, lo más justo, de formarse la gran coalición N , sería
repartir los beneficios en partes iguales, dando un beneficio de 133.33 para cada uno. La
suma de dos jugadores sería 266.66, y no llegaría a los 300 de beneficio de la coalición
formada por dos jugadores. De manera que no hay reparto posible en la gran coalición
que cumpla el principio de racionalidad coalicional, resultando el core vacío.
Como vemos, el core nos limita el conjunto de vectores de pagos que podemos
elegir como solución a nuestro problema, de manera que todos los jugadores acepten el
pago obtenido, pero no nos da, en general, una solución única. El caso más corriente
será el de un core no vacío pero no puntual. Ya comentamos anteriormente que el core
era un concepto de solución de tipo conjunto. En nuestro estudio nos centraremos a
partir de ahora en conceptos de solución de tipo puntual, como los que veremos a
continuación.
1.3.2 Valores en juegos cooperativos
(0,0,400)(0,400,0)
(400,0,0)
1 3 300x x 1 2 300x x
2 3 300x x

El core es uno de los conceptos más importantes de Teoría de Juegos, porque
limita el conjunto de posibles soluciones a un conjunto de vectores de pago que
cumplen una serie de restricciones razonables. Sin embargo, en la práctica, muchas
veces nos interesa conocer una solución concreta, un punto que nos sirva como posible
reparto de pagos de una función característica v. Para abordar este problema se han
definido varias reglas de reparto que eligen un único reparto de pagos. Por ejemplo, el
nucleolus, que fue introducido por Schmeidler (1969), es una regla que toma una
solución incluida dentro del core, siempre que éste no sea vacío. Existen otras reglas de
reparto que son completamente independientes del core, tanto en su definición, como en
el hecho de que no siempre pertenecen al core. Dentro de estas reglas estudiaremos las
dos más utilizadas, el valor de Shapley y el valor de Shapley ponderado.
Para ello, definiremos las soluciones de tipo puntual y algunas propiedades que
pueden cumplir las distintas soluciones de un juego UT.
Definición 1.8 Una solución sobre Γ N es una aplicación
ϕ : Γ N → Rn ,
que a cada juego ( N ,v )∈Γ N le hace corresponder un vector de Rn, donde la componente
i-ésima del vector representa el pago que recibe el jugador i.
Algunas propiedades que puede cumplir una solución son:
Eficiencia.
Una solución ϕ : Γ N → Rn es eficiente si para todo juego ( N ,v )∈Γ N, se
tiene que
∑i=1
n
ϕi ( N , v )=v (N ).
Simetría. Se dice que dos jugadores i , j∈N son simétricos si

v ( S∪ {i } )=v ( S∪ { j } ),
para cualquier coalición S⊆N ¿{i , j¿ }.
Una solución ϕ : Γ N → Rn es simétrica si para todo juego ( N ,v )∈Γ N y para
todo par de jugadores i , j∈N , simétricos en( N ,v ), se tiene que
ϕ i ( N ,v )=ϕ j ( N ,v ).
Jugador nulo.
Se dice que i∈N es un jugador nulo si v ( S∪ {i } )=v ( S ), para cualquier
coaliciónS⊆N ¿{i¿}.
Una solución ϕ : Γ N → Rn satisface la propiedad de jugador nulo si para
todo juego ( N ,v )∈Γ N y para todo jugador nulo en ( N , v ) ,i∈N se tiene
que f i ( N , v )=0.
Aditividad. Una solución ϕ : Γ N → Rn es aditiva si para todo par de juegos
( N ,v )∈Γ N y ( N , w )∈Γ N , se tiene que
ϕ ( N , v+w )=ϕ ( N ,v )+ϕ (N , w ) .
Positividad. Si para cualquier juego monótono ( N , v )∈Γ0 se tiene que
ϕ ( N , v )≥ 0.
Una coalición S se dice una coalición de socios en el juego( N ,v )∈Γ0 si
v ( R∪T )=v ( R ) , para todo T⊂S ,T ≠ S y R⊂N ¿ .
Compañerismo. Si dada una coalición de socios S en ( N ,v )∈Γ0, entonces
para todo i∈S,
ϕi ( N ,v )=ϕi(S ,(∑j∈ Sϕ j ( N , v ) uS)).

Una coalición de socios S se comporta como si fuera un único jugador
de tal forma que cualquier coalición no aumenta su utilidad si se une a
una sub coalición propia de S. El axioma de compañerismo lo que nos
indica es que la utilidad total que consiguen en el juego ( N , v ) los miembros de
cada coalición de socios, P , j∈S , (N , v ) , se la reparten los jugadores de S del
mismo modo que si jugasen el juego de unanimidad uS entre ellos solos.
Una coalición de socios S se comporta como si fuera un único jugador, de tal
forma que cualquier coalición no aumenta su utilidad si se une a una sub-coalición
propia de S. El axioma de compañerismo nos indica que la utilidad total que consiguen
en el juego ( N , v ) los miembros de cada coalición de socios, ∑j∈ S
ϕ j ( N ,v ), se la reparten
los jugadores de S del mismo modo que si jugasen el juego de unanimidad uS , entre
ellos solos.
Una vez definidas estas propiedades, ya podemos presentar el valor de Shapley y
el de Shapley ponderado, mediante sus caracterizaciones axiomáticas.
1.3.2.1 El valor de Shapley
El valor de Shapley es el concepto de solución más utilizado dentro de los juegos
cooperativos de utilidad transferible. Shapley analizó los juegos cooperativos intentando
contestar a la siguiente cuestión: dada la función característica de un juego, ¿cuál es el
pago esperado para un jugador determinado? En este concepto de solución, se trata de
buscar un reparto de pagos único que cumpla una serie de propiedades o axiomas
previamente establecidos. Shapley (1953) partió de cuatro axiomas o suposiciones que,
según él, debería cumplir el reparto de pagos óptimo, y demostró que sólo una
asignación de pagos cumplía todos los axiomas, siendo esta asignación el valor de
Shapley. Es importante destacar que el valor de Shapley es un concepto de solución
independiente del core, y al no exigirle que cumpla el principio de racionalidad
coalicional, no siempre es una solución que pertenezca al core. Sin embargo, para los
juegos convexos, el valor de Shapley sí pertenece al core del juego.
Para introducir el valor de Shapley utilizaremos la caracterización axiomática
original de Shapley (1953).

Teorema 1.1 La única solución f definida en N que satisface las propiedades de
aditividad, jugador nulo, simetría y eficiencia es el valor de Shapley. Dado un juego
( , )N v , esta solución asigna a cada jugador i N el número real
ϕi ( N , v )=∑S⊆ N
q (S ) (v (S )−v (S ¿{i¿}) ) ,
dondeq ( S )= (s−1 ) ! (n−s )!n !
y s=|S|, n=|N| representan el número de jugadores que hay
en las coaliciones S y N .
La demostración de este teorema se encuentra en Shapley (1953). Se puede
observar que el valor de Shapley está determinado, de forma exclusiva y a priori, por la
función característica del juego.
El valor de Shapley tiene distintas interpretaciones. Puede interpretarse como la
contribución marginal esperada de cada jugador al entrar en una coalición al azar. En
efecto, el factor v ( S )−v (S ¿{i¿}) es la contribución marginal efectiva de i al
incorporarse aS ¿{i¿}, mientras que el factor q ( S ) es la probabilidad de que a i le toque
incorporarse precisamente a S ¿ {i¿} y no a otra coalición. Shapley justificó este valor
bajo la suposición de que un jugador se uniría a una coalición de tamaño s, siendo los
distintos tamaños equiprobables, y una vez fijado un tamaño, se uniría a una coalición
determinada de ese tamaño también de manera equiprobable. El factor q ( S ) es el que
implementa esa suposición en la expresión del valor de Shapley.
Otra manera de interpretar el valor de Shapley es la siguiente. Se supone que los
jugadores forman la gran coalición incorporándose de uno en uno, en un orden
aleatorio. De esta forma, cada jugador consigue la cantidad con la que él contribuye a la
coalición ya formada cuando se incorpora. El valor de Shapley distribuye a cada
jugador la cantidad esperada que él obtiene por este procedimiento, suponiendo que la
gran coalición de n jugadores puede formarse, de manera equiprobable, en todos los
órdenes posibles.
Ejemplo 1.4 Calcularemos el valor de Shapley para el juego definido en el Ejemplo 1.3.
Recordemos que, en este caso, N= {1,2,3 } y el juego v venía dado por

v ( {1 } )=v ( {2 } )=v ( {3 } )=0 ,
v ( {1,2 } )=100 v ( {1,3 } )=200 v ( {2,3 } )=300 ,
v ( {1,2,3 })=400.
El conjunto 2N es
2N= {∅ , {1 } , {2 } , {3 } , {12 }, {13 } , {23 }, {123 }} .
Las coaliciones a las que pertenece cada jugador son
S (1 )= {{1 } , {1,2 } , {1,3 }, {1,2,3 }}
S (2 )= {{2 }, {1,2 } , {2,3 }, {1,2,3 }}
S (3 )= {{3 } , {1,3 }, {2,3 } , {1,2,3 }}
Los coeficientes q ( S ) valdrán
q (1 )=0 !2 !3!
=13
,
q (2 )=1 !1!3!
=16
,
q (3 )=2!0 !3 !
=13
.
Calculemos ahora el pago esperado para cada jugador:
ϕ1 (N , v )=q (1 ) [ v ( {1 } )−v (∅ ) ]+q (2 ) [v ( {1,2 } )−v (2 ) ]+q (2 ) [v ( {1,3 } )−v (3 ) ]+q (3 ) [ v ( {1,2,3 })−v (2,3 ) ]=13
[ 0 ]+ 16
[ 100 ]+ 16
[ 200 ] 13
[ 400−300 ]=83.33.
ϕ2 ( N , v )=q (1 ) [ v ( {2 })−v (∅ ) ]+q (2 ) [v ( {1,2 } )−v (1 ) ]+q (2 ) [v ( {2,3 } )−v (3 ) ]+q (3 ) [ v ( {1,2,3 } )−v (1,3 ) ]=13
[ 0 ]+ 16
[ 100 ]+ 16
[ 300 ] 13
[ 400−200 ]=133.33 .

ϕ3 ( N ,v )=q (1 ) [ v ( {3 } )−v (∅ ) ]+q (2 ) [ v ( {1,3 })−v (1 ) ]+q (2 ) [ v ( {2,3 } )−v (2 ) ]+q (3 ) [ v ( {1,2,3 } )−v (1,2 ) ]=13
[ 0 ]+ 16
[ 200 ]+ 16
[ 300 ] 13
[ 400−100 ]=183.33 .
Por lo tanto, el valor de Shapley para el juego sería
ϕ ( N ,v )=(83.33 ;133.33 ;183.33 ).
Como vemos, el valor de Shapley cumple la propiedad de eficiencia
∑i∈N
ϕi (N , v )=v ( N )=400.
En este ejemplo, hemos aplicado la expresión del valor de Shapley directamente,
por ser un ejemplo muy sencillo. Cuando se calcula el valor de Shapley en juegos
monótonos, el sumatorio se restringe a coaliciones S con valor no nulo, puesto que las
coaliciones con valor nulo tendrán un término [ v ( S )−v (S ¿{i¿}) ] igual a cero.
1.3.2.2 El valor Shapley ponderado
La propiedad de simetría es uno de los principales axiomas que caracteriza el
valor de Shapley, sin embargo en ocasiones no parece razonable exigir esta propiedad.
Pensemos por ejemplo que no siempre los esfuerzos de los jugadores son iguales a la
hora de formar una coalición o bien que a menudo los jugadores tienen diferentes
habilidades lo que supone que inicialmente partan de una situación no simétrica.
También podemos pensar en situaciones no simétricas cuando cada jugador representa a
su vez a otros agentes pudiendo ser el número o el tipo de agentes representados por
cada jugador distinto. Shapley (1953) en su tesis ya introdujo los valores de Shapley
ponderados, y a partir de este momento muchos otros han desarrollado estudios de
valores no simétricos, Owen (1968, 1972), Kalai y Samet (1987) y Hart y Mas-Colell
(1989).
Definición 1.9 El valor de Shapley ponderado con sistema de ponderaciones p= ( λ , Σ )
al que denotaremos ϕ p es un valor definido para cada juego de unanimidad
uS ( S )con S⊆N , de la siguiente forma. Sea k=max { j : S j∩ S≠∅ },

( ϕp ) i ( N , uS )={ λi
∑j∈S ∩S j
λ j
, Si i∈S∩Sk ,
0 , En otro caso .
La partición ordenada Σ divide a los jugadores en distintos niveles de forma que
los jugadores que están en el nivel más alto se reparten la unidad proporcionalmente a
sus pesos, mientras que el resto de los jugadores no obtiene ninguna utilidad.
Dado que el conjunto de juegos de unanimidad uS ( S ) , S⊆N ,con S ≠∅son una
base para Γ tenemos que,
( ϕp ) i ( N ,v )=∑S⊆N
cs (ϕ p )i ( N ,uS ).
Se deduce fácilmente que si λ i=λ j , para todo i≠ j y∑ ¿ { N } entonces el valor de
Shapley ponderado es, en particular, el valor de Shapley.
Kalai y Samet (1987) axiomatizaron el valor de Shapley ponderado utilizando
propiedades de eficiencia, jugador nulo, aditividad, positividad y compañerismo.
Teorema 1.2 Un valor ϕ en Γ satisface los axiomas de Eficiencia, Jugador Nulo,
Aditividad, Positivismo y Compañerismo si y sólo si existe un sistema de ponderaciones
p tal que ϕ = ϕ P.
1.4 Conceptos básicos sobre grafos
Vamos a definir algunos conceptos básicos sobre Teoría de Grafos que se van a
emplear a lo largo de todo el proyecto.
Un grafo G es un par ordenado G= (V , E ), donde
V es un conjunto de vértices o nodos.
E es un conjunto de aristas o arcos, que relacionan estos nodos.
Se llama orden del grafo G a su número de vértices, V. El grado de un vértice o
nodo a es igual al número de arcos de E que se encuentran en él. Un bucle es una arista
que relaciona al mismo nodo; es decir, una arista donde el nodo inicial y el nodo final
coinciden.

Grafo no dirigido
Un grafo no dirigido o grafo propiamente dicho es un grafo G= (V , E )donde:
V ≠∅ .
E⊆ {x∈ P (V ):|x|=2 } donde P (V ) es un conjunto de pares no ordenados de
elementos de V.
Un par no ordenado es un conjunto de la forma {a , b }, de manera que
{a ,b }={b ,a }. Para los grafos, estos conjuntos pertenecen al conjunto potencia de V de
cardinalidad 2, el cual se denota por P (V ).
Grafo dirigido
Un grafo dirigido es un grafo G= (V , E ) donde:
V ≠∅
E⊆ {(a , b )∈V ×V : a≠ b } es un conjunto de pares ordenados de elementos
de V.
Dada una arista {a , b }, a es su nodo inicial y b su nodo final. Por definición, los
grafos dirigidos no contienen bucles.
Camino. En Teoría de Grafos se llama camino a una secuencia de vértices
dentro de un grafo, tal que exista una arista entre cada vértice y el siguiente. Se dice que

dos vértices están conectados si existe un camino que vaya de uno a otro, de lo contrario
estarán desconectados. Dos vértices pueden estar conectados por varios caminos. El
número de aristas dentro de un camino es su longitud.
Árbol. En teoría de grafos, un árbol es un grafo en el que cualesquiera dos
vértices están conectados por exactamente un camino.
Trayectoria. Una trayectoria se define como un viaje a través de los nodos que
aparecen en la secuencia, y que se origina en el nodo inicial del primer eje y finaliza en
el nodo terminal del último eje de la secuencia.
Grafo conexo. En teoría de grafos, un grafo G se dice conexo, si para cualquier
par de vértices a y b en G, existe al menos una trayectoria (una sucesión de vértices
adyacentes que no repita vértices) de a a b.


Capítulo 2
El reparto de un río contaminado
2.1 Introducción
Sea un número de agentes (por ejemplo empresas, municipios o países)
conectados entre sí por un río. Algunos de estos agentes están ubicados aguas arriba,
otros lo están aguas abajo. Los agentes situados aguas arriba contaminan toda la red del
río. Para limpiar todo esta contaminación se incurre en unos costes que son repartidos
entre los agentes. Para asignar estos costes, hay que tener en cuenta las relaciones aguas
arriba y aguas abajo entre los agentes ya que la contaminación de los agentes aguas
arriba afecta a los costes de limpieza aguas abajo. Por norma general, es muy difícil
cuantificar el coste que los agentes aguas arriba le imponen a los agentes aguas abajo.
Por otra parte, los derechos de propiedad sobre el flujo de un río no están bien
definidos. Nosotros vamos a modelar el problema como un problema de reparto de
costes con estructura de árbol con un nodo especial (al que denominaremos lago). Se
van a proponer tres métodos de reparto de costes para el problema:

o El método de Responsabilidad Local (Local Responsability Sharing)
(LRS).
o El método de reparto equitativo aguas arriba (Upstream Equal Sharing)
(UES).
o El método de reparto equitativo aguas abajo (Downstream Equal
Sharing) (DES).
Los dos primeros métodos son una generalización de los que se usaron para el
reparto de costes de contaminación introducidos por Ni y Wang (2006). El tercer
método es una generalización del valor propuesto por Littlechild y Owen (1973) para el
conocido problema sobre las tasas de aterrizaje en un aeropuerto. Mostraremos la
caracterización axiomática de los tres métodos. Para ello se introducen tres juegos
diferentes para el problema:
El juego autónomo (Stand-alone).
El juego orientado aguas arriba (Usptream-oriented).
El juego orientado aguas abajo (Downsptream-oriented).
Veremos cómo cada uno de los tres métodos propuestos coinciden con el valor de
Shapley de sus respectivos juegos. Además, probaremos que todos están en el core de
los juegos correspondientes.
Existen gran cantidad de ejemplos sobre la relevancia de establecer un reparto
adecuado de los costes de limpieza de contaminantes en la red fluvial de un río. En el
mundo, aproximadamente el 40% de los ríos son compartidos por dos o más países. Por
ejemplo el Ganges-Brahmaputra es un río internacional que pasa por la India,
Bangladesh y Nepal. Otro ejemplo conocido puede ser los Grandes Lagos que lo forman
un grupo de cinco grandes lagos entre Norte América y Canadá. En muchos de estos
ejemplos, la contaminación del agua ha dado lugar a conflictos y disputas entre
naciones. Un caso específico fue la disputa ocurrida entre Canadá y Estados Unidos
respecto a los Grandes Lagos. Por norma general, para hacer frente al problema en
muchos casos se requiere la acción internacional.
Sin embargo, en el caso de que fuera fácil llegar a un acuerdo sobre qué agentes
deben soportar los costes de limpieza de contaminantes, es difícil encontrar una
solución “aceptable” sobre el reparto de los costes. La principal dificultad es que, en la

mayoría de los casos, es muy difícil cuantificar con precisión la contribución de cada
agente en la contaminación del río.
A pesar de estas dificultades, actualmente es posible medir los costes incurridos
para mantener o limpiar la red del río. Una vez que estos costes están determinados,
necesitan ser repartidos entre los agentes. Este reparto debe llevarse a cabo de la manera
más justa y equitativa de acuerdo a ciertos principios de justicia distributiva.
En este capítulo, vamos a estudiar el reparto de la contaminación de la red de un
río. Para ello, asumimos que existe un número finito de agentes conectados a la red
fluvial. Para simplificar, supondremos que la red del río tiene una estructura tipo árbol.
Además, en cada nodo de la red hay un coste asociado a un agente. En la estructura
existe un agente especial, denominado lago al que también se le asigna un coste. El lago
juega un papel muy importante ya que crea la estructura tipo árbol.
Modelamos el problema como uno de reparto de costes con una estructura tipo
árbol con un nodo en común. Nuestro análisis depende de la relación aguas arriba-aguas
abajo entre los agentes de la red. Investigaremos la implicación de las dos teorías que
más se usan en disputas internacionales (en el contexto del problema del reparto de
costes de la red de un río contaminado):
La teoría de la soberanía territorial absoluta (Absolute Territorial Sovereignty)
(ATS)
La teoría de la integridad territorial no limitada Unlimited Territorial Integrity)
(UTI).
La teoría ATS dice que un país tiene la absoluta soberanía sobre cualquier río
situado sobre su área. La teoría UTI afirma que un país no puede alterar las condiciones
naturales dentro de su propio territorio, si ello implica perjudicar a un país vecino.
Siguiendo Ni y Wang (2006) introducimos algunos axiomas basados en las dos
teorías principales (ATS y UTI). Posteriormente, se define un juego basado en el
concepto de estructura de permisión introducido por Gilles, Owen y van den Brink
(1992).
Posteriormente describimos los métodos antes mencionados. Concretamente, el
método LRS asigna costes a los agentes basándose únicamente en sus costes autónomos,
es decir, en sus costes locales. El método UES asigna costes a los agentes basándose en
sus costes autónomos más un reparto equitativo (Upstream Symmetry) de los costes a

los agentes situados aguas abajo. El método DES asigna costes a los agentes basándose
en la suposición por la cual cada agente que está produciendo contaminación tiene el
mismo impacto sobre los agentes situados aguas abajo. Según esto, el coste de cada
agente queda repartido de forma equitativa para los agentes situados aguas abajo.
Se muestra que el método LRS está caracterizado por los axiomas de Aditividad,
Costes no nulos y Eficiencia. El método UES queda caracterizado por Aditividad,
Independencia de los costes aguas arriba, Simetría aguas arriba, Independencia de los
costes irrelevantes y Eficiencia. El método DES se caracteriza por los axiomas de
Aditividad, Independencia de los costes aguas abajo, Mismo impacto aguas abajo,
Independencia de los costes irrelevantes y Eficiencia.
Recordando cada uno de estos axiomas, Aditividad es un axioma clásico que ha
formado parte de la literatura del reparto de costes. Costes no nulos afirma que, si un
agente no impone costes externos, no se le debe penalizar. La Independencia de los
costes aguas arriba afirma que los agentes situados aguas abajo no deben soportar
ningún coste de los agentes aguas arriba siempre que ellos no sean responsables. La
Independencia de los costes irrelevantes indica que un agente no debe soportar ningún
coste del cual no sea responsable. Para entender el axioma Mismo impacto aguas abajo
se considera el siguiente escenario: Si asignamos agua de inundación a lo largo de toda
la red fluvial, queremos que el impacto (o responsabilidad) negativo sea asignado de
forma equitativa para todos los agentes aguas abajo. Este axioma requiere que un agente
aguas arriba tenga el mismo impacto que otro situado aguas abajo (es decir, que tengan
el mismo reparto de costes).
Por su interés, vamos a estudiar la relación de los tres métodos propuestos con el
valor de Shapley (Shapley, 1953). Para este propósito, vamos a considerar los tres
juegos diferentes antes mencionados: el juego autónomo (Stand-alone), el juego
orientado aguas arriba (Usptream-oriented) y el juego orientado aguas abajo
(Downsptream-oriented), mostrando que el valor de Shapley de cada juego coincide con
los métodos introducidos anteriormente.
Señalamos que los juegos orientados aguas arriba y aguas abajo guardan una
estrecha relación con el concepto de estructura de permisión introducido por Gilles,
Owen y van den Brink (1992). En un juego con estructura de permisión, algunos
agentes tienen el poder de veto sobre las acciones de otros agentes. En otras palabras,
algunos agentes necesitan el permiso de otro o más integrantes antes de que puedan
actuar o cooperar. En el problema de reparto de costes en la contaminación de la red

fluvial de un río, asumiremos que los agentes aguas arriba necesitan el permiso de los
agentes situados aguas abajo para poder emitir sus contaminantes. Esta relación entre
agentes aguas arriba y aguas abajo en la red del río conduce de forma natural a la
estructuras de permisión. Aplicaremos las soluciones propuestas en este capitulo a un
problema real.
La distribución de este capítulo va a ser la siguiente. En la Sección 2
describimos el modelo del problema de reparto de costes con una estructura tipo árbol y
propondremos los tres métodos de solución que han sido comentados anteriormente. En
la Sección 3 del capítulo se procederá a la caracterización de cada uno de los tres
métodos incluyendo sus relaciones con el valor de Shapley y el core. Finalmente,
particularizamos lo anteriormente estudiado al caso de estructura tipo línea, por su
especial interés.
2.2 El modelo
Consideremos una red fluvial en la que están ubicados una serie de agentes,
N= {1,2, …, n }, y un agente especial, L, al que denominaremos lago. Los agentes están
conectados entre sí por una serie de enlaces. Aguas arriba, cada agente vierte una
determinada cantidad de contaminantes a la red. Vamos a asumir que cada agente
necesita el permiso o la aprobación del agente situado inmediatamente aguas abajo
hacia el lago para poder verter sus contaminantes a la red. La red fluvial necesita ser
limpiada de cualquier tipo de contaminación. Supondremos los costes de limpieza de
cada enlace del río, así como loss del propio lago conocidos.
Sea N∪ { L } un conjunto de agentes y E un conjunto de enlaces sobre N∪ { L }.
Tenemos pues el grafo G=( N∪ {L } , E ) , con estructura tipo árbol, es decir, G es un
grafo sin ciclos. La función de costes asociada al grafo G viene dada por
C : E∪ { L } → R+¿ ¿ donde C ( ei )=c i es el coste de limpieza del enlace e i∈ E que está
asociado con el agente i ,i=1,2 , …, n y C ( L ) el coste asociado a L. El coste total de
todos los enlaces viene dado por C ( E )=∑i∈N
ci. Así, el problema de reparto del coste
asociado a un río contaminado es una terna ( N ∪ { L } ,G , C ). Una solución al problema
( N ∪ { L } ,G , C ) es un vector x=( x1 ,…,xn , x L)∈R+¿n+1¿ tal que ∑i
x i=C ( E )+C ( L ), donde

x i es el reparto del coste asignado al agente i∈ ( N∪ { L } ). Un método consiste en un
reparto de x que asigne a cada problema ( N∪ { L } ,G , C ) una solución x ( N∪ {L } ,G,C ).
Notar que dado el grafo G con estructura tipo árbol, las relaciones aguas arriba-
aguas abajo entre los agentes, están únicamente determinadas por el nodo L. Además
para cualquier agente, existe un único camino que conecta a los sucesivos agentes aguas
abajo con el nodo L.
En la literatura sobre estructuras de permisión, van den Brink y Gilles (1996)
consideraron situaciones en las cuales algunos agentes necesitaban permiso antes de que
pudiesen participar en actividades cooperativas. De hecho, se representa por una
asignación P : N∪ {L } →2N∪ { L }. Se asumió que los agentes j∈P (i ) tienen la aprobación
de los agentes i∈ N∪ {L } para tomar parte en las actividades cooperativas (que, en este
caso, es la emisión de contaminantes). El conjunto de todos los permisos de estructura
sobre N∪ { L } se denota por PN∪ { L }.
En la red fluvial de nuestro problema, la estructura geométrica de G proporciona
la estructura de permisión de forma natural. Dados ( N ∪ { L } ,G ,C ), el árbol G
proporciona la siguiente estructura de permisión: P : N∪ {L } →2N∪ { L },
P (i )={ j } ,
{existe un camino desde jhasta Ltal que i seael agente inmediatamente aguasabajo de j }
Asumiremos que todos los agentes j∈P (i ) necesitan la aprobación del agente
i∈ N∪ {L } para verter sus contaminantes. Naturalmente, las relaciones aguas arriba-
aguas abajo entre los agentes de la red fluvial es acíclica, es decir, ningún agente puede
ser su agente aguas arriba o aguas abajo. De esta forma, podremos centrarnos
únicamente en las estructuras de permisión acíclicas.
Ejemplo 2.1
Figura 1
Para este ejemplo tenemos la siguiente estructura de permisión P.
P (1 )=∅ , P (2 )= {1 }, P (3 )=∅ , P (4 )= {3 }, P (5 )= {2,4 } , P ( L )= {5 }.
El cierre transitivo de la estructura de permisión P∈PN∪ { L } es una estructura de
permisión P∈PN∪ { L } tal que para cada i∈ N∪{L} tenemos j∈ P (i ) si y sólo si existen
unos h1 , …, hm en N ∪ { L } tal que h1=i , hk +1∈ P ( hk ) para 1 ≤ k≤ m−1, y hm= j . Los
agentes de P ( i ) son los llamados agentes aguas arriba de i en G. Definimos para cada
S⊆N , P (S )=U i∈ S P (i ).
Así pues, es fácil comprobar que
P (1 )=∅ , P (2 )= {1 }, P (3 )=∅ , P (4 )= {3 },
P (5 )= {1,2,3,4 } , P ( L )= {1,2,3,4,5 } .
P−1 (1 )= {2,5 , L } , P−1 (2 )= {5 , L } , P−1 (3 )={4,5 , L },
P−1 (4 )= {5 , L } , P−1 (5 )= {L }, P−1 ( L )=∅ .
Bajo la estructura de permisión P∈PN∪ { L }, para cualquier coalición dada de
agentes S⊆N∪ ( L ), podemos definir tres tipos de coaliciones diferentes de agentes que
están relacionados con S.
1. El autónomo homólogo de S es él mismo.
2. El homólogo orientado aguas arriba de S es la coalición
σ ( S )=S∪ P−1 ( S ) .
3. El homólogo orientado aguas abajo de S es la coalición
α (S )=S∪ P ( S ) .

Notar que las dos coaliciones anteriores corresponden a la parte soberana y el
conjunto de autorizaciones de una coalición según van den Brink y Gilles (1996).
Basándonos en el principio ATS, la teoría de responsabilidad local requiere que cada
agente soporte su coste autónomo. Esto define el siguiente método de reparto de
responsabilidad local (LRS).
Definición 2.1 Para cualquier C∈R+¿n+1¿, el método de reparto de responsabilidad local
(LRS) viene dado por:
x iLRS (C )=ci , i=1 ,…, n , L .
Por otro lado, acorde con el principio UTI, se pueden proponer dos teorías de
responsabilidad, que darán lugar a los siguientes métodos en el reparto de costes. El
primero requiere que los agentes aguas arriba compartan la misma responsabilidad de
los costes pertenecientes a los agentes aguas abajo y, en consecuencia, definimos el
método de mismo reparto aguas arriba (UES).
Definición 2.2 Para cualquier C∈R+¿n+1 ¿, el método de mismo reparto aguas arriba
(UES) viene dado por:
φ iUES (C )= ∑
j∈ σ ( {i} )
c j
|α ( { j })|, i=1 , …,n , L .
donde |α ( { j } )| es el número de agentes en α ( { j } ).
Alternativamente, si asumimos que todos los agentes aguas abajo están
igualmente afectados por el efecto de los agentes aguas arriba, tenemos el método
denominado mismo reparto aguas abajo (Downstream Equal Sharing) (DES).
Definición 2.3 Para cualquier C∈R+¿n+1¿, el método de mismo reparto aguas abajo
(DES) viene dado por
φ iDES (C )= ∑
j∈α ({i })
c j
|σ ( { j } )|,i=1 ,…,n , L .

Para proporcionar un análisis paralelo teórico-práctico sobre cada uno de los tres
métodos, definimos tres juegos diferentes basados sobre diferentes formaciones de
coaliciones. Así, para cualquier problema ( N ∪ { L } ,G ,C ) definimos los tres juegos
siguientes
El juego autónomo (Stand-alone).
El juego orientado aguas arriba (Usptream-oriented).
El juego orientado aguas abajo (Downsptream-oriented).
Definición 2.4 Sea ( N∪ { L } ,G , C ) y P (G ) la estructura de permisión inducida por G.
Definimos el juego autónomo Ls . a . (C ) por
Ls . a . (C ) (S )=C (S ) , S⊆N ∪ {L },
donde C ( S )=∑i∈S
c i .
Definición 2.5 Sea ( N∪ { L } ,G , C ) y P (G ) la estructura de permisión inducida por G.
Definimos el juego orientado aguas arriba LU (C ) como
LU (C ) (S )=C ( σ (S ) ) , S⊆N∪ { L }.
Definición 2.6 Sea ( N∪ { L } ,G , C ) y P (G ) la estructura de permisión inducida por G.
Definimos el juego orientado aguas abajo LD (C ) como
LD (C ) (S )=C ( α (S ) ) , S⊆N∪ { L } .
Ejemplo 2.2Los juegos orientado aguas arriba y aguas abajo obtenidos a partir de la
estructura del ejemplo anterior están dados a continuación:
El juego orientado aguas arriba LU (C ):

LU (C ) (1 )=C (1,2,5 , L ) ,LU (C ) (2 )=C (2,5 , L ) , LU (C ) (3 )=C (3,4,5 , L ) ,
LU (C ) (4 )=C ( 4,5 , L ) , LU (C ) (5 )=C (5 , L ) , LU (C ) ( L )=C (L ) ,
LU (C ) (1,2 )=C (1,2,5 , L ) , LU (C ) (1,3 )=C (1,2,3,4,5, L ) ,
LU (C ) (2,3 )=C (2,3,4,5, L ) , LU (C ) (2,4 )=C (2,4,5 , L ) , LU (C ) (2,5 )=C (2,5 , L ) ,
LU (C ) (1,2,3 )=C (1,2,3,4,5 , L ) ,LU (C ) (1,2,4 )=C (1,2,4,5 , L ) ,
LU (C ) (1,2,5 )=C (1,2,5 , L ) ,LU (C ) (1,3,4 )=C (1,2,3,4,5 , L ) ,
LU (C ) (1,2,3,4 )=C (1,2,3,4,5 , L ) , LU (C ) (1,3,4,5 )=C (1,2,3,4,5 , L ) ,
LU (C ) (1,2,3,4,5 )=C (1,2,3,4,5 , L ) , LU (C ) (1,2,3,4,5 , L )=C (1,2,3,4,5 ,L ) .
El juego orientado aguas abajo LD (C ):
LD (C ) (1 )=C (1 ) , LD (C ) (2 )=C (1,2 ) , LD (C ) (3 )=C (3 ) , LD (C ) (4 )=C (3,4 ) ,
LD (C ) (5 )=C (1,2,3,4,5 ) , LD (C ) (L )=C (1,2,3,4,5 , L ),
LD (C ) (1,2 )=C (1,2 ) , LD (C ) (1,3 )=C (1,3 ) , LD (C ) (1,4 )=C (1,3,4 ) ,
LD (C ) (1,5 )=C (1,2,3,4,5 ) , LD (C ) (1 , L )=C (1,2,5 , L ) , LD (C ) (3 , L )=C (3,4,5 , L ) ,
LD (C ) (2,5 ,L )=C (1,2,3,4,5 , L ) , LD (C ) (1,2,3 )=C (1,2,3 ) ,
LD (C ) (1,2,3 , L )=C (1,2,3,4,5 ,L ) , LD (C ) (1,2,5 )=C (1,2,3,4,5 ) ,
LD (C ) (1,2,3,4 )=C (1,2,3,4 ) , LD (C ) (1,3,4,5 , L )=C (1,2,3,4,5 , L ) ,
LD (C ) (1,2,3,4,5 )=C (1,2,3,4,5 ) , LD (C ) (1,2,3,4,5 , L )=C (1,2,3,4,5 , L ) .
Es bien sabido que para un juego dado, el valor de Shapley no tiene por qué
pertenecer al core del juego, incluso si el core es distinto al vacío. Además, para un
juego cóncavo, el core es siempre distinto del vacío y, el valor de Shapley pertenece al
core.
Un juego es cóncavo si el coste marginal de un agente representa una mejora en
la coalición a la que se une, es decir, que el coste de la coalición sea menor con ese
agente que sin él. Formalmente, un juego C ( ∙ ) es cóncavo si
C ( S∪ i )−C ( S )≤ C (T∪ i )−C (T ) ,∀ S⊆T⊆N , i∉T .
En el siguiente punto veremos que los tres juegos definidos anteriormente son
todos cóncavoss. Así, sus respectivos valores de Shapley están en el core de sus juegos

correspondientes. Lo más importante es que podremos demostrar que los tres métodos
propuestos en el capítulo, coinciden con el valor de Shapley de los tres juegos
introducidos.
2.3 Caracterización de los métodos LRS, UES y DES
2.3.1 Caracterización del método LRS
Para caracterizar el método LRS, necesitamos los siguientes axiomas.
Aditividad. Para cualquier C1=(c11 , …, cn
1 , cL1 )∈R
+¿n+1 yC2=(c12 ,… ,cn
2 ,cL2 )∈ R+¿n+1 ¿¿
tenemos
x j (C1+C2 )=x j (C1 )+x j (C2 ) , para todo j∈N∪ { L } .
Aditividad es un axioma clásico en la teoría de juegos cooperativos (Shapley
1953) así, como en la literatura del reparto de costes (Moulin, 2002). Aditividad no
tiene contenido normativo, sin embargo, para nuestro problema de reparto de costes
podemos tomar la siguiente interpretación.
Imaginar que cada agente (o firma) i∈ ( N∪ { L }) tiene dos divisiones de costes,
c i1 , ci
2, respectivamente y están localizados a lo largo de dos diferentes redes fluviales.
Así pues, aditividad afirma que es lo mismo si nosotros asignamos el vector de costes
totales o los dos vectores de costes por separado para después sumarlos.
Costes no ciegos (No Blind Cost). Para cualquier i∈ N∪ {L } y cualquier C∈R+¿n+1 ,¿ si
c i=0 , entonces x i (C )=0.
El axioma de costes no ciegos establece que si un agente no contamina el
ambiente, el agente no tiene ningún coste de limpieza de contaminantes.
Eficiencia. Para cualquier C∈R+¿n+1¿ se verifica
∑j=1
n+1
x j=∑j=1
n+1
c j .

Eficiencia requiere que el reparto de costes de los agentes sume los costes
totales.
Teorema 2.1 El método de reparto de responsabilidad local (LRS) es el único método
que satisface Aditividad, Costes no ciegos y Eficiencia. Además coincide con el valor de
Shapley en el juego stand-alone (autónomo) del problema y la solución está en el core
del juego.
Demostración.
Paso 1. Es claro que el método LRS satisface los tres axiomas principales.
Vamos a comprobar que dicho método es el único que satisface estos tres axiomas.
Consideremos C k=(0 , …, 0,1,0 ,…,0 ) donde 1 representa la k-ésima componente
del vector n+1 dimensional C k ,k=1,2 , …,n+1. Por el axioma de costes ciegos,
x j (Ck )=0 , si j≠ k . Por eficiencia tenemos que
∑j=1
n+1
x j (Ck )=¿xk (C k )=∑
j=1
n+1
c jk=1 .¿
Así, x j (C k )=1 , si j=k y x j (C k )=0 , si j≠ k .
Notar que el vector de costes C k , (k=1,2 , …,n+1 ) forma una base de Rn+1.
Luego para cualquier C∈R+¿n+1¿ podemos escribir C=∑k=1
n+1
ck ∙C k=( c1 , c2 , …,cn , cL ) . El
axioma de aditividad implica que
x j (C )=x j(∑k=1
n+1
ck ∙ Ck )¿ x j(∑k=1
n+1
ck ∙ x j (Ck ))¿0+…+0+c j+0+…+0
¿c j

¿ x jLRS (C ) ,
para todo j∈N∪ { L } .
Paso 2. Para cualquierC∈R+¿n+1¿ y cualquier i∈ N∪ {L }, es obvio que la
contribución marginal del agente i en el juego Ls . a . (C ) es
Ls . a . (C ) ( S∪ {i } )−Ls . a . (C ) (S )=ci , para todo S⊂N∪ {L }¿ {i¿}. Sea s=|S| el tamaño de S,
el valor de Shapley del juego Ls . a . (C ) para el agente i es
φ i ( L s .a . (C ) )= ∑0 ≤ s≤n
s ! (n−s )!(n+1 )! ∑
S⊂ N ¿,|S|=s( Ls . a. (C ) (S∪ {i } )−Ls .a . (C ) (S ) )
¿ ∑0 ≤ s≤ n
s ! (n−s) !( n+1 )! ∑
S⊂N ¿ ,|S|=sci
¿c i ∙( ∑0≤s≤ n
s! (n−s ) !(n+1 ) !
× n!s ! (n−s )! )
¿c i ∙( ∑0 ≤s ≤ n
1n+1 )
¿c i
¿ x iLRS (C ),
para todo i∈N∪ {L }.
Paso 3. Para demostrar que el valor de Shapley está en el core, basta con mostrar que el
juego Ls . a . (C ) es cóncavo, es decir, que para todo i∈ N∪ {L } y todo S , T⊆N ¿ si S⊆T ,
entonces
Ls . a . (C ) ( S∪ {i } )−Ls . a . (C ) (S ) ≤ Ls . a . (C ) (T∪ {i } )−Ls .a . (C ) (T ) .
Pero ambos lados de la inecuación son igual a c i. Así, el juego Ls . a . (C ) es
cóncavo. ⎕
2.3.2 Caracterización del método UES

En este apartado, vamos a ver la caracterización del método de igual reparto
aguas arriba o método UES. Comprobaremos que la solución coincide con el valor de
Shapley del juego orientado aguas arriba generado desde el problema. Además, la
solución obtenida está en el core.
Recordar que, dado una función de coste C=(c1 , c2 , …, cn ,c L), el juego asociado
orientado aguas arriba queda definido por
LU (C ) (S )=C ( σ (S ) )= ∑j∈σ ( S )
c j , S⊆N∪ { L } ,
donde σ ( S )=S∪ P−1 ( S ) .
Asumimos que LU (C ) (∅ )=0. Notar que
LU (C ) ( N ∪ {L })=C (σ ( N∪ {L }))=C ( N ∪ {L } ) .
Rescribimos el método UES a continuación
φ iUES (C )= ∑
j∈ σ ( S)
c j
|α ( { j } )|,i=1, …, n , L.
donde |α ( { j } )| es el número de elementos en α ( { j } ), y α ( { j } )= { j }∪ P ( { j } ). En adelante, en
ocasiones notaremos { j } por j.
Vamos a introducir los siguientes axiomas.
Independencia de los costes aguas arriba. Para cualesquiera i∈ N∪ {L },
C , C '∈ R+¿n+1¿ tal que c l=cl' , l∈ P−1 (i ), tenemos x j (C )=x j (C ' ) , para todo j∈ P−1 ( i ).
Este axioma está basado en la idea de responsabilidad aguas abajo, e incluye la
versión de responsabilidad de la teoría sobre la integridad territorial no limitada (UTI).
Esta dice que el reparto del coste de un agente sólo depende de sus costes de
contaminación, así como de todos los costes aguas abajo, pero no sobre los costes que
se produzcan aguas arriba sobre los que no tiene ninguna responsabilidad.

Simetría aguas arriba. Para cualquieri∈ N∪ {L }, para todo j , k∈α ( {i } )= {i }∪ P (i ),
tenemos
x j (0 , …, 0 , c i , 0 , …, 0 )=xk (0 , …, 0 , c i , 0 , …, 0 ) .
La simetría aguas arriba requiere que todos los agentes situados aguas arriba
tienen la misma responsabilidad sobre los costes asociados aguas abajo. En cuanto a los
costes asociados aguas abajo, vamos a tratar con igualdad a todos los agentes aguas
arriba, porque asumiremos que la contaminación generada no es fácil de eliminar y,
además, es muy difícil ponderar la contribución a la contaminación de cada agente
situado aguas arriba, en los costes asociados aguas abajo. Así pues, el axioma implica
que cualquier agente, sin importar la lejanía con los agente aguas abajo, es responsable
de sus despojos.
Independencia de los costes irrelevantes. Para cualquieri∈N∪ {L }, para todo
j∈N∪ { L }¿( P ( i )∪σ ( {i } )¿), tenemos
x j (0 , …, 0 , c i ,0 , …, 0 )=0.
Este axioma establece que al coste de un agente i, si existe otro jugador j el cual
es irrelevante para dicho agente en su relación aguas arriba y aguas abajo y, además, no
emite ningún contaminante (o lo que es lo mismo, que no impone ningún coste), éste no
debe soportar ningún coste de limpieza.
Teorema 2.2 El método UES es el único que satisface Aditividad, Independencia de los
costes asociado aguas arriba, Simetría aguas arriba, Independencia de los costes
irrelevantes y Eficiencia. Además, éste coincide con el valor de Shapley del juego
orientado aguas arriba asociado al problema y está en el core del juego.
Demostración. La prueba se divide en tres etapas.
Paso 1. Primero veremos que el valor de Shapley, ϕ, del juego orientado aguas
arriba, LU (C ), coincide con el método UES, φ iUES.
Por definición de juego orientado aguas arriba, para cualquier

C k (0 ,…, 0,1,0 , …, 0 ) ,
donde 1 representa la k-ésima componente del vector n+1 dimensional C k. El juego
correspondiente orientado aguas arriba viene dado por
LU (Ck ) ( S )=0 , si S⊂N∪ { L }¿ ( {k } ) .
LU (Ck ) ( S )=1, enotro caso .
Claramente, todos los agentes en N ∪ { L }¿ ( {k } ) son nulos y, además, todos ellos
son simétricos en α ( {k } ). Así, el valor de Shapley del juego LU (Ck ) viene dado por
ϕi (LU ( Ck ))={ 1|α ( {k } )|
, i∈α ( {k } ) ,
0 , en ot ro caso ,
para todo i∈N∪ {L }.
El vector de costes, C k , ( k∈ {1 ,…, n , L } ) , forma una base de Rn+1, para cualquier
C∈R+¿n+1¿, entonces puede ser únicamente escrito como C= ∑k∈ N∪ { L }
ck ∙ Ck. Por definición
de juego orientado aguas arriba, para ∅ ≠ S⊆N∪ {L } tenemos
LU (C ) (S )= ∑j∈σ ( S )
c j
¿ ∑j∈σ ( S) ( ∑
k∈N ∪ {L }[ ck ∙ C k ] j)
¿ ∑k∈N∪ { L }
ck ∙( ∑j∈σ ( S )[Ck ] j)
¿ ∑j∈σ ( S)
ck ∙ LU (CK ) (S ) .
Donde [C k ] j es la componente j-ésima del vector C. Como el valor de Shapley satisface
aditividad se tiene
φ i ( LU (C ))= ∑k∈ N∪ { L }
ck ∙ x iSh ( LU (C k ))
¿ ∑k∈N∪ { L }¿ ({i })
0+ ∑k∈ σ ( {i} )
ck
|α ( {k } )|¿φ i
UES (C ) .
Para todoi∈ N∪ {L }.
Paso 2. Vamos a mostrar que el método UES es el único que satisface
aditividad, independencia de los costes asociado aguas arriba, simetría aguas arriba,
independencia de los costes irrelevantes y eficiencia.
Primero demostraremos que φUES satisface los cinco axiomas. Aditividad es
trivial. Si φUES satisface independencia de los costes aguas arriba, para cualquier
i∈ N∪ {L } y cualquier C , C '∈ R+¿n+1¿ tal que c l=cl' , l∈ P−1 (i ) entonces para todo
j∈ P−1 ( i ) tenemos
φ iUES (C )= ∑
l∈σ ({ j} )
c j
|α ( {l } )|
¿ ∑l∈ { j}∪ P−1 ( j )
c j
|α ( {l } )|
¿ ∑l∈ { j}∪ P−1 ( j )
c j '
|α ( {l } )|¿φ j
UES (C ' ) ,
ya que si j∈ P−1 ( i ) entonces P−1 ( j )⊆ P−1 (i ) .
Para ver que φUES satisface simetría aguas arriba, para cualquier i∈ N∪ {L }, para
todo j , k∈α ( {l } )= {i }∪ P ( i ) tenemos
φ iUES (0 , .. , 0 , ci ,0 , …, 0 )= ∑
l∈σ ( { j })
c j
|α ( {l })|
¿ ∑l∈ { j}∪ P−1 ( j )
cl
|α ( {l } )|

¿ci
|α ( i )|
¿ ∑l∈ { j}∪P−1 (k )
c l
|α ( {l } )|
¿ ∑l∈σ ({k })
c l
|α ( {l } )|¿φk
UES (0 , .. ,0 , ci , 0 ,…,0 ) .
Vamos a ver ahora que φUES satisface la independencia de los costes irrelevantes.
Como j∈N∪ { L }¿( P ( i )∪σ ( {i } )¿) tenemos que i∉ P−1 ( j ). Por otra parte, si i∈ P−1 ( j )
implica j∈σ (i ). Así, si C=(0 , …,0 , c i ,0 , …,0 ) entonces c l=0 , para todo
l∈ { j }∪ P−1 ( j )=σ ( j ). Así, tenemos
ϕ jUE S (C )= ∑
l∈σ ( { j })
c l
|α ( {l } )|=0.
Finalmente, en el paso 2 vamos a mostrar que φUES es el valor de Shapley del
juego orientado aguas arriba. Como el valor de Shapley satisface eficiencia, φUES
también lo satisface.
Ahora vamos a ver que el método UES es el único que satisface estos cinco
axiomas. Supongamos que un método de reparto de costes φ satisface los cinco
axiomas. Fijemos arbitrariamente una estructura de árbol que contenga n+1 nodos. Para
cualquier k∈ {1,2 , …,n , L }, sea C k=(0 , …, 0,1,0 ,…,0 ) donde uno es la componente k-
ésima del vector de dimensión n+1, C k. Por la independencia de los costes aguas arriba,
φ j (Ck )=0 , para todo j∈ P−1 (k ). Por la independencia de los costes irrelevantes,
φ j (Ck )=0 , para todo j∈N∪ { L }¿( P (k )∪σ ({k })¿). Por la simetría aguas arriba,
φ j (Ck )=φ j ' (C k )= β ≥ 0 , para todo j , j'∈α ( {k }). Por eficiencia tenemos
∑j∈ N∪ { L }
φ j ( Ck )=¿
¿ ∑j∈ P−1 ( k )
φ j (Ck )+ ∑j∈ {k }∪ P (k )
φ j ( Ck )+ ∑j∈N ∪ {L }¿(P ( k )∪ {k }∪ P−1 ( k )¿)
φ j (C k )

¿0+ ∑j∈α ( {k })
β+0
¿ β ×|α ( {k } )|¿1.
Por lo tanto,
{φ j (Ck )= 1
|α ( {k } )|, si j∈α ( {k }) ,
φ j (Ck )=0 , enotro caso .
De nuevo, cualquier C∈R+¿n+1¿ puede ser únicamente escrito como
C=(c1 , …, cn , cL )= ∑k∈N∪ { L }
ck ∙Ck. Por aditividad tenemos
φ i (C )=φ i( ∑k∈ N∪ { L }
ck ∙C k )¿ ∑
k∈ N∪ { L }ck ∙ φi (C k )
¿ ∑k∈N∪ { L }¿(P ( i)∪α ({i })¿)
0+ ∑k∈ P ( i)
0+ ∑k∈ α ( {i} )
ck
|α ( {k } )|¿φ i
UES (C ) ,
para todo i∈N∪ {L }.
Paso 3. En este paso, vamos a demostrar que el valor de Shapley está en el core.
Para ello, basta con probar que el juego orientado aguas arriba LU (C ) es cóncavo. Así,
para todo i∈ N∪ {L }, todo S , T⊆ ( N∪ { L } )¿{i¿ }y S⊆T , tenemos
LU (C ) (S∪ {i })−LU (C ) (S )≥ LU (C ) (T∪ {i } )−LU (C ) (T ) .
Suponiendo que S⊆T e i∉T . Considerar
H SU=σ (S∪ {i } )¿ (S ) y HT
U=σ (T∪ {i } )¿ (T ) . Afirmamos que HTU ⊆H S
U. En efecto,

H SU=σ (S∪ {i } )¿ (S )
¿ S∪ {i }∪ P−1 (S )∪ P−1 ( i )¿(S∪ P−1 ( S )¿)
¿ {i }∪ P−1 (i )¿ (S∪ P−1 ( S )¿) ,
además se verifica
HTU= {i }∪ P−1 (i ) ¿(T ∪ P−1 (T )¿),
y, se tiene que
T∪ P−1 (T )⊇ S∪ P−1 (S ) .
Luego,
HTU ⊆H S
U .
Por lo tanto,
LU (C ) (S∪ {i })−LU (C ) (S )= ∑j∈ ( S∪ i )
c j−∑j∈ (S )
c j
¿ ∑j∈H S
U
c j
≥ ∑j∈HT
U
c j
¿ ∑j∈ ( T∪ i)
c j−∑j∈ (T )
c j
¿ LU (C ) (T∪ {i } )−LU (C ) (T ) .
⎕
2.3.3 Caracterización del método DES
Pasamos ahora a ver el método de igual reparto aguas abajo o método DES y
vamos a demostrar que dicho método coincide con el valor de Shapley del juego
orientado aguas abajo y que, además, está en el core.
Recordando que para una función de coste dada C=(c1 , c2 ,…, cn ,c L), el juego
orientado aguas abajo viene definido por

LD (C ) (S )=C ( α (S ) )= ∑j∈α (S )
c j , S⊆N∪ {L } ,
donde α (S )=S∪ P ( S )=S∪(U j∈ S P ( i ) ) .
Asumimos que LD (C ) (∅ )=0. Notar también que
LD (C ) ( N∪ {L })=C (α ( N ∪ { L } ) )=C ( N∪ {L }) .
Recordar que
ϕiDES (C )= ∑
j∈α ( i)
c j
|σ ( { j } )|, i=1 , …, n , L .
Donde σ ( { j } )= { j }∪ P−1 ( j ) .
Para caracterizar el método DES, necesitamos definir dos axiomas adicionales
Independencia de los costes aguas abajo. Para cualquier i∈ N∪ {L } y cualesquiera
C , C '∈ R+¿n+1¿ tal que c l=cl' , l∈ P−1 (i ), tenemos x j (C )=x j (C ' ) , para todo j∈ P (i ).
El axioma de independencia de los costes aguas abajo afirma que un agente aguas
arriba no tiene el control sobre los agentes situados aguas abajo por lo que tampoco
tiene la responsabilidad de sus costes. Este axioma se podría entender mejor en
contextos de control de inundación. En este caso, un agente situado aguas arriba no
tiene responsabilidad sobre las precipitaciones de la región aguas abajo, que pueden
causar inundaciones.
Mismo impacto aguas abajo. Para cualquier i∈ N∪ {L }, para todo
j , k∈σ ( {i })={i }∪ P−1 ( i ), tenemos
x j (0 , …, 0 , c i , 0 , …, 0 )=xk (0 , …, 0 , c i , 0 , …, 0 ) .
El método DES requiere que todo agente situado aguas abajo, sea igualmente
afectado por otro agente situado aguas arriba, el cual debe tener permiso de todos sus
agentes aguas abajo de acuerdo con la estructura de permisión. En contraste con la
simetría aguas arriba, el método DES trata a todos los agentes situados aguas abajo con
igualdad, refiriéndonos a términos de responsabilidad para unos costes aguas arriba
dados. De nuevos este axioma se podría entender mejor si considerásemos el problema
del control de las inundaciones. En este caso, se requiere que la inundación deba ser
distribuida por igual entre todos los agentes situados aguas abajo. Además, este axioma
implica que cualquier agente, sin importar su distancia con los agentes situados aguas
arriba, sea afectado por igual. Esta es una forma alternativa a la teoría de
responsabilidad derivada de la teoría sobre la integridad territorial no limitada o teoría
UTI.
Se presenta a continuación una caracterización con estas propiedades del método
introducido.
Teorema 2.3 El método DES es el único método que satisface Aditividad,
Independencia de los costes aguas abajo, Mismo impacto aguas abajo, Independencia
de los costes irrelevantes y eficiencia. Además, éste coincide con el valor de Shapley del
juego orientado aguas abajo que está en el core del juego.
Demostración. La prueba de este teorema es similar al Teorema 2.2.
Análogamente, el proceso lo vamos a dividir en tres pasos.
Paso 1. Primero, veremos que el valor de Shapley del juego orientado aguas
abajo coincide con el método DES, ϕ DES (C ).
Por la definición del juego orientado aguas abajo, para cualquier
C k (0 ,…, 0,1,0 , …, 0 ) ,
donde 1 representa la k-ésima componente del vector n+1 dimensional C k. El juego
correspondiente orientado aguas abajo viene dado por
LD ( Ck ) ( S )=0 , si S⊂N∪ { L }¿ ( {k } ) ,
LD ( Ck ) ( S )=1 , enotro caso .

Claramente, todos los agentes en N∪ { L }¿ ( {k } ) son nulos y todos ellos son
simétricos en α ( {k } ). Así el valor de Shapley del juego LD ( Ck ) viene dado por
ϕi (LD (Ck ))={ 1|σ ( {k })|
, i∈σ ( {k }) ,
0 , en otro caso .
Para todo i∈ N∪ {L }.
El vector de costes, C k , ( k∈ {1 ,…, n , L } ) , forma una base de Rn+1, para cualquier
C∈R+¿n+1¿, puede ser únicamente escrito como C= ∑k∈ N∪ { L }
ck ∙ C k. Por la definición del
juego orientado aguas abajo, para ∅ ≠ S⊆N∪ {L } tenemos
LD (C ) (S )= ∑j∈ α ( S )
c j
¿ ∑j∈α ( S ) ( ∑
k∈N ∪ { L }[ck ∙ C k ] j)
¿ ∑k∈ N∪ { L }
ck ∙( ∑j∈α ( S )[Ck ] j)
¿ ∑j∈σ ( S)
ck ∙ LD (CK ) ( S ) ,
donde [C k ] j es la componente j-ésima del vector C. Como el valor de Shapley verifica
aditividad tenemos
ϕi ( LD (C ) )= ∑k∈N∪ {L }
ck ∙ x iSh (LD ( Ck ))
¿ ∑k∈ N∪ { L }¿ ({i })
0+ ∑k∈ α ( {i })
ck
|σ ( {k } )|¿ϕi
DES (C ) ,
para todoi∈ N∪ {L }.

Paso 2. Vamos a mostrar que el método UES es el único que satisface los cinco
axiomas.
Aditividad es trivial. Si ϕ DES satisface independencia de los costes aguas abajo,
para cualesquiera i∈ N∪ {L } y C ,C '∈ R+¿n+1¿ tal que c l=cl' , l∈ P (i ) entonces para todo
j∈ P ( i ) tenemos
ϕiDES (C )= ∑
l∈α ( { j })
c j
|σ ( {l } )|
¿ ∑l∈ { j}∪ P ( j )
c j
|σ ( {l } )|
¿ ∑l∈ { j}∪P ( j )
c j '
|σ ( {l } )|¿ϕ i
DES (C ' ) ,
ya que j∈ P (i )implica que P ( j )⊆ P ( i) .
Para ver que ϕ DES satisface la igualdad en el impacto aguas abajo, para cualquier
i∈ N∪ {L }, para todo j , k∈σ (i )={i }∪ P−1 ( i ) tenemos
ϕ iDES ( 0 ,.. , 0 , c i , 0 , …, 0 )= ∑
l∈ α ( { j })
c j
|σ ( {l })|
¿ ∑l∈ { j}∪ P ( j )
c l
|σ ( {l } )|
¿ci
|σ ( {i } )|
¿ ∑l∈ { j}∪ P ( k )
c l
|σ ( {l } )|
¿ ∑l∈α ({ k })
c l
|σ ( {l } )|¿ϕk
DES ( 0 ,.. , 0 , ci , 0 , …, 0 ).
Vamos a ver ahora que ϕ DES satisface la independencia de los costes irrelevantes.
Para cualesquiera i∈ N∪ {L }, C=(0 , …,0 , c i ,0 , …,0 ) y j∈N∪ { L }¿( P (i )∪σ ( {i } )¿)

tenemos
ϕ jDES (C )=0.
Ahora probamos que el método DES es el único que satisface estos cinco
axiomas. Supongamos que un método de reparto de coste ϕ satisface los cinco axiomas.
Fijemos arbitrariamente una estructura tipo árbol que contenga n+1 nodos. Para
cualesquiera k∈ {1,2 ,…,n , L }, sea C k=(0 ,…, 0,1,0 , …, 0 ) donde uno es la componente
k-ésima del vector de dimensión n+1, C k. Por la independencia de los costes aguas
abajo, ϕ j (C k )=0 , para todo j∈ P (k ). Por la independencia de los costes irrelevantes,
ϕ j (C k )=0 , para todo j∈N∪ { L }¿( P (k )∪σ ( {k })¿)=N∪ {L }¿( P (k )∪ {k }∪ P−1 (k )¿). Por
la igualdad del impacto aguas abajo, ϕ j (Ck )=ϕ j ' (C k )=β ≥ 0 , para todo
j , j'∈σ ( {k } )=P−1 (k )∪ {k }. Por eficiencia tenemos
∑j∈N∪ { L }
ϕ j (C k )=¿
¿ ∑j∈ P (k )
ϕ j (C k )+ ∑j∈ { k }∪ P−1 (k )
ϕ j (Ck )+ ∑j∈N ∪ { L }¿(P ( k )∪ {k }∪ P−1 ( k ) ¿)
ϕ j (Ck )
¿0+ ∑j∈σ ( {k })
β+0
¿ β|σ ( {k })|¿1.
Por lo tanto,
{ϕ j (C k )= 1|σ ( {k })|
, si j∈σ (k ) ,
ϕ j ( Ck )=0 , en otrocaso .
Cualquier C∈R+¿n+1¿ puede ser únicamente escrito como
C=(c1 , …, cn , cL )= ∑k∈N∪ { L }
ck ∙Ck. Por aditividad tenemos

ϕi (C )=ϕi( ∑k∈N∪ {L }
ck ∙C k )¿ ∑
k∈ N∪ { L }ck ∙ ϕ i ( Ck )
¿ ∑k∈N∪ { L }¿(P−1 (i)∪α ( {i}) ¿)
ck ∙ ϕi (Ck )+ ∑k∈ P−1 ( i)
ck ∙ ϕi (C k )+ ∑k∈α ({i })
ck ∙ ϕi (Ck )
¿ ∑k∈α ({ i})
ck
|σ ( {k } )|¿ϕi
DES (C ),
para todo i∈N∪ {L }.
Paso 3. En este paso vamos a demostrar que el valor de Shapley está en el core.
Para ello, basta con probar que el juego orientado aguas abajo LD (C ) es cóncavo. Así,
para todo i∈ N∪ {L }, todo S , T⊆ ( N∪ { L } )¿{i¿ }y S⊆T , tenemos
LD (C ) (S∪ {i } )−LD (C ) ( S )≥ LD (C ) (T ∪ {i })−LD (C ) (T ) .
Sean
H SD=α (S∪ {i })¿ ( S )=S∪ {i }∪ P ( S )∪ P (i ) ¿(S∪ P (S )¿),
y
HTD=α (T∪ {i } )¿ (T )=T∪ {i }∪ P (T )∪ P (i ) ¿(T ∪ P ( S )¿) ,
Tenemos
H SD=S∪ {i }∪ P (S )∪ P ( i ) ¿(S∪ P (S )¿)={i }∪ P ( i )¿(S∪ P (S )¿) ,
y
HTD=T ∪ {i }∪ P (T )∪ P ( i ) ¿(T∪ P ( S )¿)= {i }∪ P ( i ) ¿(T∪ P (T )¿) .
Luego,

T∪ P (T )⊇ S∪ P ( S ) .
Teniendo pues
HTD⊆H S
D .
Por lo tanto,
LD (C ) (S∪ {i } )−LD (C ) ( S )= ∑j∈α ( S∪ {i })
c j− ∑j∈α ( S)
c j
¿ ∑j∈H S
D
c j
≥ ∑j∈HT
D
c j
¿ ∑j∈α ( T∪ {i })
c j− ∑j∈ ( αT )
c j
¿ LD (C ) (T∪ {i } )−LD (C ) (T ) . ⎕
2.4 Problemas con estructura tipo línea
Hasta ahora hemos visto tres métodos para tratar el problema de reparto de los
costes de limpieza de un río, entre una serie de agentes instalados en su cauce. Este río
tenía una estructura tipo árbol como ya se ha comentado a lo largo del capítulo. En la
práctica, la mayoría de los ríos existentes en el mundo tienen una estructura
denominada tipo línea, sin bifurcaciones, que es un caso de especial interés dentro de las
estructuras tipo árbol.
En esta sección, nos vamos a centrar en particularizar los conceptos anteriores
para caracterizar, en este caso, cada uno de los tres métodos que hemos visto hasta el
momento. Esto se aplicará posteriormente, en el Capítulo 4 del proyecto donde veremos
una aplicación sobre el río Kishon.
2.4.1 Introducción
Existen 148 ríos en todo el mundo que pasan por dos países, 30 atraviesan tres, 9
recorren cuatro y 13 van a lo largo de cinco o más (ver Ambec y Sprumont (2002);
Barret (1994)). Estos ríos proporcionan a las personas de los distintos países el uso del
agua como recurso pero puede existir contaminación, en el caso de que el afluente lleve
agentes contaminantes. Este mismo problema también ocurre en distintas regiones del
mismo país y que son atravesadas por un río. Notar, por ejemplo, que un río al que se le
eleva la temperatura un par de grados a causa de la contaminación, puede presentar
ventajas y desventajas para las personas que viven en su curso.
Desde el lado del beneficio, Ambec y Sprumont (2002) desarrollaron un modelo
para estudiar cómo unos agentes (que pueden ser ciudades, regiones o países) que viven
a lo largo de un río comparten el recurso del agua. Ellos se basaron en las dos
principales doctrinas nombradas anteriormente, ATS y UTI.
La búsqueda sobre el reparto de costes de contaminación está basada en Ambec
y Sprumont (2002), sin embargo, nuestro problema es diferente y debemos mirar las
doctrinas ATS y UTI, desde una perspectiva diferente. Existe una relación dual entre
derechos y responsabilidades. Consideramos las responsabilidades como contrapartidas
de los derechos. Por lo tanto, debemos interpretar las doctrinas ATS y UTI en términos
de responsabilidad en la asignación de los costes de contaminación.
Así pues, la doctrina ATS, generalizada para nuestro contexto, puede entenderse
como una declaración según la cual, la persona que vive en el segmento j-ésimo tiene
absoluto poder de contaminar en dicho segmento lo que desee si y sólo si se
compromete a pagar todos los costes necesarios para la limpieza de los elementos
contaminantes que ha producido. Análogamente, la segunda doctrina UTI también
extiende su objetivo sobre las responsabilidades de los que contaminan. Según esta
doctrina, las personas del segmento j tienen el derecho de poder contaminar en dicho
segmento, así como todos los que contaminan aguas arriba deben pagar el coste de
limpieza de contaminantes.
Para poder definir el problema, primero debemos ver cuál es la cantidad del
importe de los costes de limpieza que se va a dividir entre los agentes responsables de la
contaminación. Para ello, asumimos que cada segmento usa la forma más eficiente para
eliminar las sustancias contaminantes. Así, los costes de limpieza de todos los
segmentos están en su nivel más bajo determinado por los requisitos ambientales
correspondientes.

2.4.2 El modelo
Consideremos un río divido en n segmentos numerados i =1,2,…,n siendo 1 el
punto más alto y n el más bajo. Hay n empresas situadas a lo largo del río, cada una de
ellas está establecida en su segmento. Así, la empresa número tres estará en el segmento
tercero. Asumiremos que cada empresa genera un tipo de contaminante que debe ser
evitado a la hora de arrojarlo al río. En cada segmento i (i=1,2,…,n) la autoridad
medioambiental establece una norma sobre el grado de contaminación que cada agente i
requiere gastando ci para limpiar la contaminación en el segmento i y por lo tanto,
conseguir alterar de forma mínima todo el ecosistema. Queremos encontrar un método
para asignar los costes totales de limpieza de contaminantes (c1+c2+…+cn ) entre todas
las empresas. Desde el punto de vista de la responsabilidad, el problema de la
asignación de coste se puede entender como la división del coste total entre las n
empresas ya que son las responsables de la contaminación del río.
Formalmente N= {1, …, n } es un número finito de agentes (por ejemplo,
empresas industriales). El vector C=( c1 ,…,cn )∈ R+¿n¿ representa los costes de
contaminación, donde ci representa el coste imputado al agente i ∈N . El problema de
reparto de los costes de contaminación viene dado por (N,C). Cuando el número de
agentes es fijo (N fijo) el problema pasa a conocer el vector C. Una solución al
problema (N,C) es el vector x=( x1 , …, xn )∈R+¿n¿ tal que ∑i
x i=∑i
c i, donde xi es el
reparto de coste asignado al agente i. El método consiste en una aplicación x que asigna
a cada problema (N,C) una solución x(N,C).
Definición 2.7 Para cualquier C∈R+¿n¿, el método LRS viene dado por
x iLRS (C )=ci, i=1,…,n.
Definición 2.8 Para cualquier C∈R+¿n¿, el método UES viene dado por
x iUES (C )=1
ic i+
1i+1
ci+1+…+ 1n
cn, i=1,…,n.

Con el objetivo de proporcionar un análisis teórico para cada uno de los dos
métodos (es decir, su conexión con el valor de Shapley y el core) vamos a definir los
dos juegos siguientes basados en los principio LR y DR, respectivamente.
Sea N= {1, …,n } el grupo de agentes, suponemos que cada agente mantiene su
posición fija. Sea S⊂N cualquier coalición formada a partir de las n industrias.
Denotaremos min S el elemento más pequeño de S, es decir, la fábrica aguas más arriba
de la coalición S.
Bajo el principio LR, cada miembro de S es responsable únicamente de los
costes de limpieza de contaminantes en su propio segmento y, la responsabilidad total
de la coalición S es simplemente la suma de las responsabilidades locales de cada
miembro. Así, para cualquier C∈R+¿n¿ el coste total de la coalición S se puede escribir
como
vC ( S )=∑i∈S
c i.
Por otra parte, bajo el principio DR, cada miembro de S tiene la responsabilidad
de los costes de limpieza de contaminantes no sólo de su propio segmento sino además
de todos los costes asociados a los agentes de los segmentos aguas abajo. Así, para
cualquier C∈R+¿n¿ el coste total de la coalición S se puede escribir como
wC ( S )= ∑i=minS
n
c i.
Asumimos que vC (∅ )=wC (∅ )=0. Ahora, para cualquier C∈R+¿n¿, hemos
generado dos juegos, ( N ,vc ) y ( N ,w c) , respectivamente. En los dos puntos siguientes
del capítulo, nos vamos a centrar en la asignación de costes de acuerdo a los métodos
LRS y UES. Veremos como ambos métodos coinciden con el valor de Shapley de los
juegos ( N ,vc ) y ( N ,w c) , respectivamente y, ambos están en el core del juego
correspondiente.

2.4.3 Caracterización del método LRS
En esta sección, primero proporcionaremos la caracterización axiomática del
método LRS. Posteriormente, investigaremos su relación con el valor de Shapley, así
como con el core del juego ( N ,vc ).
Teorema 2.4 El método LRS es el único que satisface Aditividad, costes no ciegos y
Eficiencia.
Demostración. Sabemos que el método LRS satisface los tres axiomas anteriores. A
continuación se va a demostrar que dicho método es el único capaz de hacerlo.
Consideremos C k=(0 , …, 0,1,0 , …, 0 ) donde 1 es la k-ésima componente del vector n-
dimensional C k, para k=1,2 ,…,n. Por el axioma de costes no ciegos, si j ≠ k, x j (Ck )=0.
Por Eficiencia, tenemos lo siguiente
∑j=1
n
x j (Ck )= xk (C k )=∑
j=1
n
c jk=1.
Así, x j (C k )=1 , si j=k ,
x j (C k )=0 , si j ≠ k .
Notar que los vectores de costes, C k , (k=1,2 , …,n ) forman una base de Rn. Así,
para cualquier C∈R+¿n¿, podemos escribir C=∑k=1
n
ck ∙C k=( c1 , c2 , …,cn ). Además,
Aditividad implica que
x j (C )=x j(∑k=1
n
ck ∙ Ck ) ¿∑
k=1
n
ck ∙ x j (Ck )
¿0+…+0+c j+0+…+0
¿c j

¿ x jLRS (C ),
para todo j ϵ N .
⎕
Nota. El método LRS indica que a todas las empresas se le realiza un trato justo, en el
sentido de no imponer coste alguno a dicha empresa si no tiene toda la responsabilidad
local. Además, los costes de distribución son anónimos, incluso si la empresa cambia su
localización, el reparto de costes no cambia. Estas dos características junto a los
axiomas de Aditividad y Eficiencia nos recuerdan que existen conexiones entre el
método LRS y el valor de Shapley de ciertos juegos inducidos por el problema. En
realidad, la siguiente proposición nos muestra que la solución LRS coincide con el valor
de Shapley ϕ del juego ( N , vC ) para todo C∈R+¿n¿.
Recordando que valor de Shapley de un juego ( N ,v ) se definía como
ϕi (v )= ∑0≤ s ≤ n−1
s ! (n−s−1 ) !n ! ( ∑
S⊂N ¿,|S|=sv ( S∪ {i } )−v (S )) .
Tenemos la siguiente proposición.
Proposición 2.1 Para todo C∈R+¿n¿ y vC tenemos x iLRS (C )=ϕi ( vC ) , para todoi∈N
Demostración. Para cualquier C∈R+¿n¿ y cualquier i∈ N , la contribución marginal de
la empresa i es vC ( S∪ {i } )−vC ( S )=c i , para todo S⊂N ¿{i¿} (incluyendo el vacío). Sea
s=|S| el tamaño de S, entonces el valor de Shapley del juego ( N ,vC ) de la empresa i es
ϕi (vC )= ∑0 ≤s ≤ n−1
s ! (n−s−1 ) !n ! ( ∑
S⊂ N ¿ ,|S|=svC (S∪ {i } )−vC (S ))
¿ ∑0≤ s≤ n−1
s ! (n−s−1 )!n ! ( ∑
S⊂ N ¿ ,|S|= sc i)
¿c i( ∑0 ≤ s≤n−1
s ! ( n−s−1 )!n!
(n−1 ) !s ! (n−s−1 ) ! )
¿c i( ∑0 ≤ s ≤n−1
1n )

¿c i
¿ x iLRS (C ) ,
para todo i∈N . ⎕
Por otra parte, la siguiente proposición nos muestra que el valor de Shapley, y
por lo tanto la solución del método LRS, están en el core del juego ( N ,vC ) .
Proposición 2.2 Para todo C∈R+¿n¿, el valor de Shapley del juego ( N , vC ) está en el
core, es decir, para cualquier S⊂N , ∑i∈ S
ϕi ( vC )=∑i∈ S
x iLRS (C ) ≤ vC (S ).
Demostración. Para ello debemos probar que el juego ( N ,vC ) es cóncavo, es decir, que
para todo i∈N , todo S ,T⊂N ¿, si S⊂T , entonces
vC ( S∪ {i } )−vC ( S ) ≥ vC (T∪ {i } )−vC (T ) .
Por definición del juego, ambos miembros de la expresión anterior son iguales a
c i. Así, el juego ( N , vC ) es cóncavo.
⎕
2.4.4 Caracterización del método UES
En esta sección, primero vamos a demostrar la caracterización axiomática del
método UES. Luego, nos vamos a centrar en la relación con el valor de Shapley y el
core. Para comenzar, vamos a ver el siguiente teorema.
Teorema 2.5 El método UES es el único que satisface Aditividad, Independecia de los
Coste aguas arriba, Simetría aguas arriba y Eficiencia.
Demostración. Es fácil de comprobar que el método UES satisface los cuatro axiomas.
Vamos a demostrar que es el único método que satisface los cuatro axiomas.

Para cualquier k=1,2 , …,n consideramos C k=(0 ,…, 0,1,0 , …, 0 ) donde 1 es la
k-ésima componente del vector de orden n, C k. Según el axioma de Independencia de
los costes aguas arriba, x j (Ck )=x j (0 , …, 0 )=0 , para todo j>k. Por el axioma de
Simetría aguas arriba, x j (Ck )=x j ' (Ck )=α , para todo j , j ' ≤ k donde α es algún número
no negativo. Por el axioma de Eficiencia tenemos
∑j=1
n
x j (Ck )=kα=1.
Así, x j (C k )=1k
, si j≤ k , x j (C k )=0 , si j>k.
A partir del vector de costes, C k , (k=1,2 , …,n ), formamos una base de Rn, para
cualquier C∈R+¿n¿, que puede ser escrita como C=∑k=1
n
ck ∙C k=( c1 , c2 , …,cn ). Luego el
axioma de Aditividad implica que, para todo jϵN ,
x j (C )=x j(∑k=1
n
ck ∙Ck )¿∑
k=1
n
ck ∙ x j (Ck )
¿ 1j
c j+1
j+1c j+1+…+ 1
ncn
¿ x jUES (C ) .
⎕
Nota. La solución UES requiere que, para el coste de la componente i-ésima c i (1<i ≤ n ),
todos los agentes aguas arriba deben soportar la misma responsabilidad para ese coste.
Por ejemplo, todas las empresas tienen el mismo reparto (1/n ) de cn. Si hay una empresa
j que no necesita pagar ningún coste de limpieza del agua en el segmento j, de acuerdo a
la norma de supervisión medioambiental local (es decir, para esta empresa c j=0), se
podría argumentar que esta empresa no debería entrar en el reparto de los costes de
limpieza del río. Esto parece cuestionar la imparcialidad de la asignación de costos
sugerida por el método UES. Sin embargo, la empresa j afirma que la contaminación
causada provoca un impacto social sobre las casas aguas abajo incluso si pasan los test
de limpieza de las autoridades locales. Si el principio DR es aceptado como una pauta
para dividir los costes totales de contaminación, se deben tomar algunas
responsabilidades para los costes de limpieza aguas abajo.
La siguiente proposición nos muestra que, bajo el principio DR, el método UES
divide el coste total de limpieza de contaminantes en el río de la misma forma sugerida
por el valor de Shapley.
Proposición 2.3 Para todo C∈R+¿n y wC¿ definido anteriormente, tenemos
x iUES (C )=ϕi (wC ) ,i∈N .
Demostración. Considerar C k=(0 , …,0,1,0 , …, 0 ) , donde 1 es la k-ésima componente
del vector de dimensión n, C k ,k=1,2 , …,n. El juego correspondiente a
C k , (k=1,2 , …,n ) viene dado por
wCk
( S )=0 , si min S>k ,
wCk
( S )=1 , en otro caso.
Claramente, para el juego (N ,wCk ), todos los agentes i >k son nulos y todos los agentes
i≤ k son simétricos. Así, el valor de Shapley del juego (N , wCk ) es
ϕi (wCk )=0 , si i >k,
ϕi (wCk )=1k
, en otro caso.
Notar que para cualquier C∈R+¿n¿, escribimos C=∑k=1
n
ck ∙C k. Por la definición
del juego (N ,wCk ), tenemos, para todo ∅ ≠ S⊂N ,
wC ( S )= ∑j=min S
n
c j

¿ ∑j=min S
n
(∑k=1
n
[ ck ∙ C k ] j)¿∑
k=1
n
ck ( ∑j=min S
n
[Ck ] j)¿∑
k=1
n
ck wCk
( S ) .
Donde [ C ] j es la componente j-ésima del vector C. Por el axioma de Aditividad y
teniendo en cuenta la expresión anterior, tenemos
ϕi (wC )=∑k=1
n
ck ϕi (wCk )
¿ 1i
c i+1
i+1c i+1+…+1
ncn
¿ x iUES (C ) ,
para todo i∈N . ⎕
La siguiente proposición muestra que el valor de Shapley del juego (N ,wCk ), es
decir, la solución del método UES, es una asignación del core.
Proposición 2.4 Para todo C∈R+¿n¿, el valor de Shapley del juego (N ,wCk ) está en el
core, es decir, para cualquier S⊂N ,∑i∈ S
ϕ i ( wC )=∑i∈S
xiUES (S ) ≤ wC (S ) .
Demostración. Para ello, tenemos que mostrar que el juego (N ,wCk ) es cóncavo. Para
cualesquiera S , T⊂N , S⊆T , i∉T , se denota por
∆1=wC ( S∪ {i } )−wC (S ),
∆2=wC (T ∪ {i })−wC (T ) ,
∆3=wC ( S∪ {i } )−wC (T∪ {i } ) ,
∆4=wC (S )−wC (T ).

Claramente, la concavidad del juego (N ,wCk ) es equivalente a ∆1−∆2≥ 0 o
∆3−∆4 ≥ 0.
Puesto que S⊂T⊂N ¿, tenemos min S ≥ minT . Luego, para cualquier i∈ N ,i∉T
existen tres posibilidades:
1. i≤ min T ≤ min S ,
2. min T< i≤ min S,
3. min T<min S≤ i.
Ahora, vamos a comprobar la concavidad del juego(N ,wCk ) en cada uno de los
tres casos:
Caso 1. Suponemos que i≤ min T ≤ min S. En este caso,
min T∪ {i }=¿min S∪ {i }=i. Por la definición de wC, tenemos ∆3=0 y ∆4 ≤0 . Por
lo tanto, ∆3−∆4 ≥ 0 .
Caso 2. Suponemos que min T< i≤ min S. En este caso,
min T∪ {i }=¿min T ,i=min S∪ {i }≤ min S . Por la definición de wC, tenemos
∆1≥ 0 y ∆2=0 . Por lo tanto, ∆1−∆2≥ 0 .
Caso 3. Suponemos que min T<min S ≤ i. En este caso,
min T∪ {i }=¿min T ,min S∪ {i }=min S. Por la definición de wC, tenemos ∆1=0 y
∆2=0. Por lo tanto, ∆1−∆2=0 .
Resumiendo, hemos visto que para cualesquiera S , T⊂N , S⊆T , i∉T ,
wC ( S∪ {i } )−wC (S ) ≥ wC (T∪ {i } )−wC (T ) ,
Así, el juego (N ,wCk ) es cóncavo. ⎕
Nota 4. Al igual que en la Nota 2, las Proposiciones 3 y 4 muestran que el método UES
y el valor de Shapley de un cierto juego, presentas ciertas similitudes en sus propiedades
y, como en la asignación del core, cumplen con el axioma independiente, en el
problema de reparto de la contaminación del río se acepta el principio DR. Por otro
lado, el método UES trata a las empresas aguas arriba de forma “injusta”. Por ejemplo,
la empresa 1 tiene un coste asignado generalmente mucho mayor que el coste local c1.
Discutimos que la asignación del método UES puede estar justificada por la teoría del
equilibrio de localización de Tiebout (1956) donde se dice que las personas
voluntariamente eligen la mejor situación para cubrir sus necesidades incluso si pudiese
acarrear un alto coste. Lo mismo se verifica para las empresas. Por ejemplo, las
tecnología (producción) de las empresas aguas arriba deben operar con agua más limpia
y ellas están dispuestas a pagar grandes cantidades de dinero en el reparto de los costes
de limpieza de contaminantes.
2.4.5 Observación sobre el método DES
Cuando aplicamos el método DES al caso de la estructura tipo línea, éste
coincide con el famoso problema sobre las tasas de aterrizaje en un aeropuerto dado
por Littlechild (1974), y Littlechild y Owen (1973).
2.5 Comentarios
2.5.1 Reconsideraciones a los métodos LRS y UES
La primera observación respecto al método LRS es que para cualquier C∈R+¿n¿,
el juego vC es de tipo aditivo o no esencial. Un juego UT, v es no esencial si existen
números α i∈ R ,i∈N , tal que v ( S )=∑i∈S
α i para todo S⊆N . A partir de ahora, dado vC ,
denotaremos un juego UT no esencial por α=( α1 , …, αn )∈R❑n . Claramente, cualquier
juego vC de un río contaminado es un juego no esencial con α i=c i ,i∈N y,
reversiblemente, cualquier juego no esencial con valores no negativos puede ser
obtenido como un juegovC de un río contaminado.

2.5.2 Axiomatización sin aditividad
Se pueden mostrar formas alternativas para la caracterización de los métodos
LRS y UES. Consideremos primero el método UES. Young (1984) caracterizó el valor
de Shapley en la clase de todos los juegos UT por los axiomas de eficiencia, simetría y
fuerte monotonicidad, pero sin el uso del axioma de aditividad.
Van den Brink (2004) mostró que este axioma también caracteriza el valor de
Shapley para la clase de juegos de subasta ya que ningún método de asignación de
costes dado por x (C )=f (wC ) satisface independencia de los costes aguas arriba cuando
f cumple fuerte monotonicidad e independencia de los costes aguas arriba
xUES (C )=ϕ ( wC ). Además, esto proporciona la caracterización axiomática del método
UES sin aditividad. Para ello, se define una nueva propiedad denominada simetría de
costes.
Simetría de costes. Para cualquier i∈ N yC∈ R+¿n¿ se tiene que x j (C )=xk (C )
para todo j , k ≤i cuando c j=0 para todo j<i.
Aunque el método LRS también satisface independencia de los costes aguas
arriba, en la sección no se usó este axioma para la caracterización del método LRS. Así
pues, nosotros hemos usado cuatro axiomas para caracterizar el método UES pero sólo
tres para el método LRS. Sin embargo, se puede caracterizar el método LRS
sustituyendo el axioma de costes no ciegos por la propiedad de simetría de costes.
Con todo esto, se pueden demostrar los siguientes teoremas.
Teorema 2.6 El método UES es el único que satisface eficiencia, simetría de
costes e independencia de los costes aguas arriba.
Teorema 2.7 El método LRS es el único que satisface eficiencia, simetría de
costes e independencia de los costes aguas abajo.


Capítulo 3
El reparto de un río contaminado
usando tasas medioambientales
3.1 Introducción
En los capítulos anteriores hemos considerado una red fluvial dividida en n
segmentos. En cada segmento hemos supuesto un agente que arroja algún tipo de
residuo al río. La autoridad medioambiental debe repartir el coste total de limpieza de la
red portadora de agua entre todos los agentes instalados en su curso.

En este capítulo vamos a proponer nuevas reglas, para distribuir los costes de
limpieza entre todos los agentes. Además, de forma análoga al capítulo anterior,
veremos la caracterización axiomática de estas reglas usando propiedades basadas en las
tasas o impuestos del agua.
La contaminación del aire y del agua fueron el foco inicial que muchas políticas
medioambientales introdujeron en los países de la OECD (Organization for Economic
Co-operation and Development) en la década de los 70. Esto supuso una motivación
para la percepción por la cual, el medio natural se iba degradando cada vez con mayor
rapidez, dando lugar a adversas consecuencias para el medioambiente y la salud del ser
humano.
Un número de países (entre ellos España, Australia o Francia) se apuntaron a
gestionar los recursos de agua y la descarga de contaminantes en común. Un importante
desarrollo en este área fue la creación de la directiva en el marco del agua de la Unión
Europea que logró integrar estos principios en los ríos situados en el área de los
distintos países europeos en 2009. Debido a la integración de estas políticas, se aclaró la
relación entre el uso del agua y la contaminación de ésta, cuyo objetivo trataba de
mejorar la eficiencia de los recursos. Por ejemplo, por ellos se permiten la comparación
entre los costes de limpieza del agua, aguas abajo antes de que se suministre, con los
costes de la desalentadora contaminación aguas arriba. Esta política también facilita los
costes de recuperación. Cuando las autoridades tienen acceso al coste de tratamiento de
agua para las operaciones de suministro, esto les da diversa información sobre los costes
de la contaminación aguas arriba. Ellos pueden usar una estimación y ver qué
contaminante debe ser eliminado. La gestión de los ríos también facilita la asignación de
agua entre los distintos usos, así como el control de todas las transferencias internas.
Gómez-Rúa (2008) desarrolla un modelo para estudiar el problema desde el
punto de vista teórico. En él se considera un río divido en n segmentos. Hay n agentes
situados a lo largo del río generando residuos. Se proponen algunas reglas para repartir
el coste de limpieza total entre todos los agentes. Además, para cada regla se propone la
caracterización axiomática usando las propiedades basadas en los impuestos sobre el
agua.
En este capítulo vamos a proponer alguna regla para repartir el coste total de
limpieza entre todos los agentes siguiendo los estudios de Gómez-Rúa (2008). Además,
proporcionaremos la caracterización axiomática usando propiedades basadas en las
tasas de agua.

Pensamos que los axiomas de Eficiencia, Independencia de los costes aguas
arriba e independencia de los costes irrelevantes son unas propiedades muy interesantes
o atractivas. Sin embargo, vamos a introducir una nueva propiedad en este contexto que
tiene en cuenta las ideas proporcionadas por los dos últimos axiomas. Llamaremos a
esta propiedad Independencia de los costes sin responsabilidad, y asegura que el reparto
de los costes de los agentes sólo depende de sus propios residuos, así como, de todos los
costes aguas abajo, pero no sobre los costes asociados con algún otro segmento del cual
no se tiene ninguna responsabilidad.
El axioma de Aditividad ha sido usado en diversas situaciones. Por ejemplo, en
juegos cooperativos con utilidad transferible, el valor de Shapley (Shapley (1953)) que
es considerado como el valor más importante en esta clase de juegos, es caracterizado
con esta propiedad. Moulin (1987) y Chun (1988) usaron mucho este axioma en
problemas de superávit de asignación respectivamente. Este axioma también fue usado
en los problemas de reparto de costes (Moulin (2002)). Moulin y Sprumont (2005) se
centraron en la regla de aditividad para problemas de reparto de coste con demanda. En
problemas de minimización de costes Bergantiños y Vidal-Puga (2007) caracterizaron
una regla y proporcionaron una detallada discusión de esta propiedad.
Algunas veces, los residuos arrojados al río son biodegradables y su
contaminación acaba desapareciendo con el tiempo. Algunos ejemplos son restos de
comida orgánica, residuos de los bosques, de las granjas, etc. En muchos casos es
posible conocer el rango de biodegradación de los residuos, denominado δ . Así pues,
parece razonable afirmar que el coste que un agente debe pagar para la limpieza de un
área contaminada depende de este índice. Vamos a introducir una nueva propiedad en
este contexto denominada ratio de biodegradación.
En muchos países existen muchas alternativas en el diseño de las tasas de agua.
Además, en muchos casos, existe una diferencia entre los ratios aplicados a los usos
domésticos y los ratios aplicados a los usos industriales. Por lo tanto, hay una
componente variable que depende de diversos factores como puede ser el volumen de
agua consumida, la carga de contaminación, la población del municipio, el tipo de
residuo, etc. Este es el caso de Australia, Canadá, Finlandia, Francia, Alemania, Suecia,
España, Corea, USA,… entre muchos otros (Gago et al. (2006), OECD (2006)).
La última parte del capítulo trata con una aproximación de un juego teórico. En
el artículo de Gómez-Rúa (2008), también se introduce un juego UT y vamos a probar

que una de las reglas que se van a proponer, coincide con el valor de Shapley ponderado
de ese juego. Generalizaremos este resultado al nuevo contexto.
Así pues el capítulo se distribuye de la siguiente forma. En la Sección 2 vamos a
introducir el modelo. En la Sección 3 procederemos a la caracterización axiomática de
las reglas propuestas. En la Sección 4 vamos a introducir el ratio de biodegradabilidad.
Finalmente, probaremos que una de las reglas introducidas coincide con el valor de
Shapley ponderado de un juego cooperativo particular.
3.2 El modelo
Vamos a seguir el modelo presentado por Dong et al. (2007). Consideremos
pues, una red fluvial en la que se instalan una serie de agentes, N= {1,2, …, n }, y un
agente especial, L, denominado lago. Los agentes están conectados los unos a los otros
mediante una serie de enlaces. Los agentes situados aguas arriba vierten una cierta
cantidad de contaminantes a la red. El río contaminado necesita ser limpiado. El coste
de limpieza de cada enlace y del agente lago son conocidos y deben ser repartidos entre
todos los jugadores.
Sea N '=N ∪ {L } el grupo formado por una serie de agentes y sea E una serie de
enlaces sobre N’, asumiremos que E tiene una estructura en forma de árbol, es decir, que
todos los agentes conectados por E no formen ningún ciclo.
La función de coste (del árbol E) es C : N∪ { L }→ R+¿¿ donde para cada
i∈N ,C ( i)=c i denota el coste asociado al agente i (por ejemplo, el coste asociado al
enlace entre el agente i y su sucesor hacia L) y C ( L ) es el coste asociado a L.
Denotaremos
C ( N )=∑i∈N
c i .
Dado el árbol E, las relaciones aguas arriba y aguas abajo entre los agentes,
queda únicamente determinada por el nodo L. También, para cada agente, hay una única
forma de conectar un secuencia de agentes aguas abajo sucesivamente a L.
Ahora vamos a introducir alguna notación relacionada con la estructura del
grafo. Dado ( N ' , E ,C ), Definimos los siguientes conjuntos.
U (i )≔ { j∈N :existenh1, h2 , …, hm enN ' tal queh1=i , hk+1U ( hk ) paratodo 1≤ k ≤ m−1 y hm= j }.
Los agentes de U ( i ) se denominan agentes aguas arriba de i en E.
D (i )≔ { j∈N ' : i∈U ( j ) }.
Los agentes de D ( i ) se denominan agentes aguas abajo de i en E.
Dados i , j∈N ' definimos un conjunto
d ( i , j )≔ {l∈N ' : l es elúnico camino de i hacia j }. La distancia geodésica desde i hasta j es
el cardinal de d ( i , j ), es decir, |d ( i , j )|.
3.3 Caracterización
Recordemos que Dong et al. (2007) caracterizaron el método UES con cinco
axiomas: Aditividad, Eficiencia, Independencia de los costes aguas arriba,
Independencia de los costes irrelevantes y Simetría aguas arriba. Este último asegura
que todos los agentes situados aguas arriba tienen la misma responsabilidad para unos
costes dados de contaminación aguas abajo. Sin embargo, existen situaciones donde este
axioma no puede ser aplicado. En Gómez-Rúa (2008) nos podemos adentrar más en este
asunto.
La propiedad de independencia de los costes irrelevantes asegura que para el
coste de un agente i, cualquier otro agente que no pertenezca a su área aguas arriba o
aguas abajo y que no vierta ningún contaminante no debe soportar ningún coste de
limpieza.
En esta sección vamos a caracterizar el conjunto de reglas que satisfacen tres
propiedades: Eficiencia, Aditividad y una nueva propiedad que recoge las ideas de
independencia de los costes aguas arriba e independencia de los costes irrelevantes. A
esta propiedad se le denominará Independencia de los costes sin responsabilidad.
Vamos a recordar e introducir formalmente los tres axiomas.
Aditividad. Para cualesquiera C1=(c11 , …,cn
1 )∈ R+¿n +1¿ y C2=(c12 ,…,cn
2)∈ R+¿n +1¿
tenemos x j (C1+C2 )=x j (C1 )+x j (C2 ) , para toda j∈N ' .

Eficiencia. Eficiencia requiere que el reparto de costes de todos los agentes sumen
el coste total.
∑j=1
n
x j=∑j=1
n
c j.
Independencia de los costes sin responsabilidad. Sean i∈ N ' y C , C '∈R+¿n+1¿
talque c j=c j' para todo j∈D (i )∪ {i }, entonces, x i (C )=xi ( C' ) .
Aditividad, Eficiencia e Independencia de los costes sin responsabilidad
aseguran que el reparto de costes de un agente sólo depende de su propia
contaminación, así como, de todos los costes aguas abajo, pero no sobre los costes
asociados con algún otro segmento. Es decir, si la contaminación causada por el agente i
no alcanza ese segmento, entonces dicho agente no debe soportar ningún coste de
limpieza para ese tramo.
Ahora vamos a pasar a presentar la familia de reglas que satisfacen los tres
axiomas anteriores. Estas reglas dividen el coste de cada segmento j (c j ) entre los
agentes responsables de ello (i∈U ( j )∪ { j } ) proporcionalmente al vector p j' ∈R+¿n+1. ¿
Teorema 3.1 Una regla x satisface los axiomas de Eficiencia, Aditividad e
Independencia de los costes sin responsabilidad si y sólo si para cada j=1 ,…,n , L
existe un sistemas de pesos ( pij )i∈N '∈R+¿n+1¿ tal que pi
j=0 cuando i∈ N ' ¿(U ( j )∪ { j }¿),
∑i∈N '
p ij=1 y
x i (C )=∑j∈N '
pij c j ,
para todoC∈R+¿n+1¿ y todo i∈ N ' .
Demostración. Para ello debemos probar que x satisface los tres axiomas:

Veamos primero que x satisface Eficiencia.
∑i∈N '
x i (C )=∑i∈N '
∑j∈N '
pij c j=( ∑j∈N '
c j)(∑i∈N 'p i
j)=∑j∈N '
c j .
Comprobamos que x satisface Aditividad.
Sean C , C '∈ R+¿n+1¿ e i∈ N ', así
x i (C+C ' )=∑j∈ N '
x ij (C+C ' )
¿ ∑j∈ N '
pij (c j+c j ' )
¿ ∑j∈ N '
pij c j+∑
j∈N '
pij c j '
¿ x i (C )+x i (C ' ) .
La regla x satisface Independencia de los costes sin responsabilidad.
Sean C ,C '∈R+¿n+1¿ e i∈N 'tal que c j=c j ' para todo j∈D ( i )∪ {i }. Ya que pij=0 , cuando
i∈ N ' ¿(U ( j )∪ { j }¿)
x i (C )=∑j∈N '
pij c j= ∑
j∈D ( i)∪ {i}pi
j c j= ∑j∈D ( i)∪ {i }
pij c j '=∑
j∈N 'pi
j c j '=xi (C ' ) .
Ahora vamos a demostrar el recíproco. Para ello, asumimos que x es una
solución que cumple eficiencia, aditividad e independencia de los costes sin
responsabilidad. Para cada j∈N ' , sea 1 j=( y1 ,…, yn , yL )∈ R+¿n +1¿ tal que y j=1 e y j=0
cuando i≠ j. Vamos a definir p j=x (1 j ).
Sea xP la regla inducida por el sistemas de pesos ( p j )i∈N '. Probaremos que x=x p
en algunos casos, que fueron demostrados por Bergantiños y Vidal-Puga (2004).

Caso 1. Sea ( p j )i∈ N ' un sistema de pesos.Ya que x satisface Eficiencia,
∑i∈N '
x i (1 j )=1. Por la definición de solución x i (1 j )∈R+¿n+1 ¿. Sean i , j∈N ' tal que
i∈ N ' ¿(U ( j )∪ { j }¿). Debido a que x satisface la independencia de los costes sin
responsabilidad, x i (1 j )=x i (0 , …,0 ). Ya que x i (0 , …, 0 )∈R+¿n+1¿ y ∑l∈N '
xl (0 ,…,0 )=0,
x i (0 , …, 0 )=0.
Caso 2. Sea c j∈Q+¿¿ (un número racional positivo), entonces
x i ( 0 ,… ,c j ,…,0 )=c j x i (0 , …, 1 ,… ,0 ) .Sea c j=1/q, donde q∈N . Por aditividad
x i (0 , …, 1 ,…,0 )=∑k=1
x i(0 , …, 1q
,…, 0)=q xi(0 , …, 1q
,…,0). Así,
x i(0 ,…, 1q
, …, 0)= x i (0 ,…,1 ,…,0 )q
=c j x i (0 , …,1 , …, 0 ) .
Sea c j∈Q+ ¿¿, decimos que c j=pq . Por aditividad,
x i(0 ,…, pq
, …,0)=p xi(0 ,…, 1q
, …, 0) .
Que junto a la expresión anterior.
x i(0 ,…, pq
, …,0)= pq
x i (0 ,…,1 , …, 0 ) .
Caso 3. Sea c j∈R ¿ (un número irracional positivo), entonces
x i ( 0 ,… ,c j ,…,0 )=c j x i (0 , …, 1 ,… ,0 ) . Sea c j∈R ¿. Entonces existe {b l }l=1∞ tal que
b l∈Q+¿,bl <c j ¿ y liml → ∞bl=c j.
Sea l∈N . Debido a que x ( 0 , …,c j−b l ,…, 0 )∈R+¿n+1¿ y
∑i∈N '
x i (0 , …, c j−bl , …,0 )=c j−bl,

0 ≤ xi (0 ,…, c j−bl ,…,0 ) ≤c j−bl .
Por aditividad,
x i ( 0 ,… ,c j ,…, 0 )=x i (0 , …, c j−bl , …,0 )+x i ( 0 , …,b l , …, 0 ) ,
0 ≤ xi (0 , …,c j ,…, 0 )−x i (0 ,…, bl ,…, 0 ) ≤c j−bl .
Ya que b l∈Q+¿¿,
x i ( 0 ,… ,b l , …, 0 )=bl x i (0 , …, 1 , …,0 ).
0 ≤ xi (0 , …, c j , …, 0 )−bl x i (0 , …,1 , …, 0 ) ≤ c j−b l .
Así,
0≤ liml→ ∞
[ x i (0 , …,c j ,…,0 )−b l xi (0 ,… ,1 ,…,0 ) ] ≤ liml→ ∞
[c j−bl ] ,
0≤ xi (0 , …, c j ,…,0 )−cl x i (0 , …, 1 , …,0 )≤ 0 ,
x i ( 0 ,… ,c j ,…,0 )=c j x i (0 , …, 1 ,… ,0 ) .
Caso 4. Dado i∈ N ' y C∈R+¿n+1¿, x i ( c1 ,…, cn, c L)=∑j∈N '
xi (0 , …, 0 , c j , 0 , …,0 )
Debido a que x ip ( c1 ,…, cn ,c L)=∑
j∈N '
p ij c j y por los Casos 2 y 3
x i ( 0 ,… ,c j ,…,0 )=c j x i (0 , …, 1 ,… ,0 )=c j pij , para todo j∈N ' y todo c j∈R+¿❑¿, esta
claro que x=x p .
⎕
3.4 Otros resultados
En esta sección vamos a proporcionar la caracterización de las nuevas reglas,
añadiendo una propiedad diferente basada en las tasas medioambientales reales. Esta
propiedad es una generalización de la introducida en Gómez-Rúa (2008).
Como ya se ha comentado a lo largo del capítulo, en muchos casos no todos los
agentes arrojan el mismo tipo de residuos. Además, si los residuos son biodegradables,

su contaminación desaparecerá con el paso del tiempo. En muchas ocasiones es posible
conocer el grado de biodegradabilidad mediante el índice δ . Si esto ocurre, los costes
que los agentes pagan por la contaminación de un área deben depender de este ratio.
Vamos ahora a introducir una nueva propiedad siguiendo esta línea.
Ratio de biodegradación (BR). Dado j∈N ' , para cualquier i , k∈ (U ( j )∪ { j } ) tal que
|d (i , j )|≥|d (k , j )|,
x i ( 0 ,… ,0 , c j , 0 ,…, 0 )=δ|d (i , j)|−|d ( k , j )|xk (0 , …,0 , c j ,0 , …,0 ) .
Asumiremos que 0≤ δ ≤ 1. Notar que un valor de δ=0 , significa que el residuo
del agente i sólo afecta a su propia área. En este caso, el ratio de biodegradación indica
que cada agente paga el coste correspondiente a su propia área, llamándolo x i (C )=ci ,
para todo C , i∈ N '. Por otro lado, un valor de δ=1 , significa que los residuos no son
biodegradables. En este caso, el axioma de ratio de biodegradación coincide con la
simetría aguas arriba.
En el siguiente teorema vamos a estudiar los efectos de añadir el ratio de
biodegradación a las propiedades en el Teorema 1
Teorema 3.2 Una regla x satisface los axiomas de Eficiencia, Aditividad,
Independencia de los costes sin responsabilidad y ratio de biodegradación si y sólo si
para cada j=1 ,…,n , L existe un sistema de pesos ( pij )i∈N '∈R+¿n+1¿ tal que pi
j=0 cuando
i∈ N ' ¿(U ( j )∪ { j }¿),∑i∈N
p ij=δ|d (i , j)|−|d ( k , j)| pk
j , para cualquier i∈U ( j ) , k∈U ( j )∪ { j } tal
que |d ( i , j )|≥|d (k , j )|,∑i∈N '
p ij=1 y
x i (C )=∑j∈N
p ij c j ,
para todoC∈R+¿n+1¿ y todo i∈ N ' .

Demostración. Para ello, debemos probar que x satisface el ratio de biodegradación.
Sean i , j , k∈N ' tal que i∈U ( j ) , k∈U ( j )∪ { j } y |d ( i , j )|≥|d (k , j )|. Sea
(0 ,…,c j , …, 0 )∈R+¿n+1¿. Entonces
x i ( 0 ,… ,c j ,…,0 )=∑l∈N
p il cl=p i
j c j=δ|d (i , j)| p jj c j
¿δ|d (i , j )|δ|d (i , j )|−|d (k , j)| p jj c j=δ|d (i , j)|−|d ( k , j )| pk
j c j
¿δ|d (i , j )|−|d (k , j)| xk (0 ,…, c j , …, 0 ) .
Ahora vamos a demostrar el recíproco. Para ello, asumimos que x es una
solución que cumple eficiencia, aditividad, independencia de los costes sin
responsabilidad y ratio de biodegradación. Por el Teorema 1, para cada j=1 ,…, n , L
existe un sistema de pesos ( pij )i∈ N '∈R+¿n+1¿ tal que pi
j=0 cuando i∈ N ' ¿(U ( j )∪ { j }¿),
∑i∈N '
p ij=1 y x i (C )=∑
j∈N 'pi
j c j , para todo C∈R+¿n+1 ¿ y todo i∈ N ' . Vamos ahora a
demostrar que pij=δ|d (i , j )|−|d (k , j)| pk
j, para cualquier i∈U ( j ) , k∈U ( j )∪ { j } tal que
|d (i , j )|≥|d (k , j )|.
Para probar el Teorema, p j=x (1 j ). Debido a que x satisface el ratio de
biodegradación,
pij=x i (1 j )=δ|d ( i , j )|x j (1J )=δ|d ( k , j )|δ|d (i , j )|−|d (k , j )| x j ( 1J )
¿δ|d (i , j )|−|d (k , j)| xk (1J )=δ|d ( i , j )|−|d (k , j )| pkj .
⎕

Capítulo 4
Aplicaciones
4.1 Introducción

En este capítulo nos vamos a centrar en la parte más práctica del proyecto. Hasta
ahora hemos visto tres capítulos muy teóricos en los cuales se han presentado diferentes
formas de abordar el problema de reparto de costes de limpieza de los contaminantes de
un río. Ahora vamos a ver dos aplicaciones sobre casos reales. En cada una de ellas,
vamos a poner en práctica todos los conocimientos adquiridos hasta el momento.
En el primer caso, realizaremos una aplicación real basada en la limpieza del río
Kishon. Veremos y analizaremos los distintos métodos de reparto aplicados a una
estructura tipo línea.
En el segundo caso, consideraremos un ejemplo sobre un proyecto a cargo del
Asian Development Bank (ADB) en China. El objetivo del proyecto asignado es
restaurar el entorno ecológico de un lago muy contaminado, el Bai Yang Dian en la
provincia de Hebei, al norte de China. Esta aplicación tiene una estructura tipo árbol.
4.2 Israel: Río y Puerto Kishon, mar mediterráneo.
Vamos a presentar uno de los mayores desafíos a nivel mundial, en lo que a
rehabilitación de los ríos se refiere. Así, el río Kishon es conocido por ser el río más
contaminado de Israel. Dicho afluente, con algo más de 70 kilómetros de largo, ocupa
una superficie de 1.100 kilómetros cuadrados. Nace en el Valle de Jezreel y desemboca
al mar en la bahía Haifa. Dado que corre por el principal centro industrial del país, el río
se ha convertido en un gran recipiente de contaminantes tóxicos procedentes de las
refinerías de petróleo, las industrias
petroquímicas y las plantas de
pesticidas de Haifa. Los análisis
que se han realizado de los
sedimentos del río han mostrado
altas concentraciones de metales
pesados, originados en los
efluentes industriales que han sido
arrojados al río durante décadas.
La contaminación era tan
mala que el personal de la Armada

de Israel que se había entrenado en el río durante los años 1970 y 1980 provocó que un
número desproporcionado de ellos desarrollaran cáncer con el paso del tiempo. Como
resultado, 92 buzos serán compensados por los gastos relacionados con las
enfermedades que se pueden conectar a las toxinas de Kishon. A continuación se
muestra una tabla con la composición del agua en distintos puntos de la bahía de Haifa
en una muestra tomada en el año 1998.
Parámetro estación Rompeolas Club náutico Astillero
Muro de
piedra
Dique flotante
Muelle pesquero entrada
Muelle pesquero
pHConductividad eléctricamS/cmN H3mq /lTotal N, mg/lN O3, mq/lSST, mg/lDOB, mg/lDOC, mg/lDetergentes, mg/lAceites, mg/l
3.2838.418.423.7403063900.71
3.8543.114.319.427.6192960
0.89<1
2.8232.619.726.449.11677
1500.86
5
2.343121
31.361.91778
1950.94
2
4.9644.213.320.21813<5580.8<1
2.1523.317.933.158.81672
1980.88
4
3.4836.619.525.637.62249
1050.94<1
Hace varios años se detectó contaminación por efluentes industriales ácidos y
descomposición de desechos agrícolas y municipales, los cuales provocaron demasiada
corrosión en los navíos de pesca y las instalaciones de acero del puerto y del astillero.
Durante 1997-2000, la corrosión se incrementó debido a la extrema acidez llegando a
niveles de pH en el rango de 2 a 4, al elevado contenido y actividad de H2S (1 a 4 mg/l)
y otros factores corrosivos.
El estado de deterioro del Río Kishon se debatió por primera vez en la Knéset
en 1978. Si bien, el llamado a un proyecto de rehabilitación y a la aplicación de
estrictas medidas para cesar la descarga de sustancias contaminantes al río puede
remontarse a ese año, desde entonces no se han realizado progresos significativos. Los
esfuerzos se han centrado principalmente en aumentar la supervisión, la inspección y
la aplicación de la ley, y en recopilar información actualizada sobre descargas de
efluentes. En los últimos años se cavaron túneles superficiales a lo largo de las orillas
del río que se cubrieron con láminas de polietileno selladas para depositar en ellos
temporalmente grandes cantidades de sedimentos extraídos del río, hasta que se
encuentre una solución permanente para el tratamiento de estos sedimentos. Aguas
arriba, antes de que el Kishon entre en la zona industrial de Haifa, una franja de tres

kilómetros se ha transformado en un hermoso lugar. Aquí, en la zona de Kiriat Tivón,
que anida entre los valles de Jezreel y Zevulún, una descuidada sección del río se ha
convertido en un parque público, como se puede apreciar en la siguiente fotografía.
Este primer parque fue inaugurado en el 2001 junto a una bahía de pescadores. En el
futuro se pretende agregar secciones adicionales para formar finalmente un único
parque a lo largo de todo el curso del río.
Debido a la complejidad del proceso de rehabilitación, un requisito previo
esencial es una comprensión más clara del ecosistema del río Kishon y de la bahía de
Haifa. Con tal propósito, la Asociación Ambiental Regional de Haifa en cooperación con
el Ministerio de Calidad Ambiental inició una investigación sobre la capacidad de
arrastre de la bahía de Haifa y del río Kishon. El estudio, que fue financiado por el
Banco de Inversiones Europeo e implementado por un consorcio de compañías
israelíes y danesas, desarrolló un enfoque integrativo de la descarga de efluentes en la
zona que toma en cuenta no solamente la cantidad y calidad de los efluentes
industriales y de alcantarillado, sino también el destino de dichos contaminantes en el
entorno marino. Basándose en dicho estudio, se desarrollaron nuevas normas para la
descarga de aguas servidas y efluentes industriales en la zona de la bahía de Haifa.
Pero, ¿pueden estos esfuerzos garantizar la rehabilitación total de la severa
contaminación del río Kishon? La respuesta a esta pregunta es que no, pero si es

verdad que se está avanzando en buena dirección para conseguir este propósito. La
mayor esperanza la ofrece la Autoridad del Río Kishon creada en 1994. Esta autoridad
se dedica a rehabilitar el río y transformarlo en una atracción regional. El esquema de
rehabilitación habla de suspender todas las descargas de aguas servidas, extracción y
tratamiento de los sedimentos, mejora del paisaje a las orillas del río, protección de
inundaciones y equipamiento de instalaciones recreativas, deportivas y turísticas.
Hasta ahora, se han completado un estudio ecológico global sobre el Kishon y un plan
maestro. La planta de tratamiento de aguas servidas de Haifa ha sido mejorada y una
comisión interministerial para determinar la calidad del agua y establecer normas de la
descarga de efluentes presentó sus recomendaciones. Asimismo, se trazaron planes
para cesar el arrojo de efluentes industriales al río hasta finales de 2011. Es de esperar
que los esfuerzos del pasado se combinen con los esfuerzos del presente para
proporcionar también a este río una nueva vida.
Con el propósito de la rehabilitación total, el gabinete aprobó en Julio de 2011
un reforma de 220 millones de NIS (unos 62 millones de dólares aproximadamente)
destinados a la limpieza del río Kishon en Haifa. El proyecto de tres años de duración
fue presentado por el ministro de Medio Ambiente, Gilad Erdan.
Dicho estudio incluye la desviación de las secciones del río y el dragado de las
piscinas de lodo a una profundidad de 2,5 metros de largo de un tramo de siete
kilómetros. El lodo, como ya se ha indicado, contiene metales pesados, fósforo, cadmio
y arsénico, que se han acumulado durante décadas. La nueva tecnología será utilizada
para purificar el área cercana al lugar de trabajo, y así poder conseguir un parque
continuo a lo largo del río rehabilitado.
La propuesta de Erdan incluye 60 millones de NIS de asignación por el
Ministerio de Hacienda para financiar parte del proyecto, con el argumento de que el
gobierno tiene la responsabilidad histórica de la contaminación del río Kishon, ya que
las fábricas contaminantes fueron propiedad del gobierno durante años. El Ministerio de
Hacienda se opuso a la asignación, insistiendo en que el Ministerio de Protección del
Medio Ambiente debe financiar el proyecto de su presupuesto actual. El gabinete
finalmente resolvió la controversia al decidir que los cuatro cuerpos a compartir la
financiación serían el Ministerio de Finanzas, el Ministerio de Protección del Medio
Ambiente, el Ministerio de Agricultura, y la Autoridad de los ríos.

A pesar de que el gobierno acepta la decisión, los conflictos permanecen. Tanto
el Ministerio de Protección del Medio Ambiente como las autoridades locales
reconocen la necesidad de rehabilitar el río Kishon y están preparados para ayudar a
financiar el proyecto. El Ministerio dice, sin embargo, que Haifa Chemicals es la única
empresa que se niega a poner el dinero que se le exige, 28 millones de NIS, y que la
compañía está ofreciendo sólo la décima parte del importe. Un comité de expertos
independiente, encargado por el Ministerio de Protección del Medio Ambiente,
recomienda la limpieza del río Kishon sobre la base del perfil de la contaminación se
encuentra, que incluye los derivados de combustibles y metales pesados, que son
característicos de la contaminación por derivados del petróleo, y esto no es un negocio
de Productos Químicos de Haifa. La compañía es la responsable de un insignificante
2,8% de la contaminación y se notificó al ministerio hace seis meses que se trataba de
compartir el costo de la limpieza sobre la base de la proporción de la contaminación,
determinada por el comité de expertos, e incluso financiar una mayor proporción del
costo del proyecto de limpieza, con base en la parte proporcional de la empresa de la
financiación total.
Cuando el proyecto esté terminado, el río Kishon será diferente. Va a estar más
limpio, el lecho del río se descontaminará y se hará más profundo para evitar las
inundaciones de la Krayot, y, además, su curso será modificado; Una franja de 1,5
kilómetros de refinerías de petróleo se desviará a un canal alternativo de medio punto
que, básicamente, dan la vuelta al sitio donde se realizará el dragado de lodos vertidos y
descontaminados, con extensos tratamientos biológicos. Los microorganismos
eliminarán las toxinas. Este es el plan de la División de Agua y Ríos del Ministerio de
Protección del Medio Ambiente. El dragado y descontaminación se llevará a cabo por
una empresa que será elegida mediante licitación internacional.
El gabinete también aprobó un plan para los suelos contaminados en la década
de 1990 que se almacena en piscinas temporales a lo largo de las orillas del río Kishon.
280.000 metros cúbicos de lodos tóxicos fueron dragados en el momento, la mayoría
de los cuales nunca han sido descontaminados. 150.000 metros cúbicos de estos lodos
serán descontaminados.
4.2.1 Objetivo de la Aplicación

A continuación, vamos a describir brevemente cual es el objetivo de esta
aplicación basada sobre el río Kishon. Empezaremos con una descripción del modelo
que vamos a usar. Utilizaremos una estructura de tipo línea la cual estará dividida en
varios segmentos, en cada uno de los cuales se situará un agente.
Una vez detallado el modelo procederemos a resolver el problema de forma
analítica usando los distintos métodos que hemos estudiado a lo largo de todo el
proyecto. Primero resolveremos la aplicación siguiendo el método LRS (Local
Responsability Sharing). Después veremos la aplicación desde el punto de vista del
método UES (Upstream Equal Sharing). El tercer método que vamos a usar es el DES
(Downstream Equal Sharing). También veremos la resolución del río Kishon utilizando
métodos de reparto que hacen uso de sistemas de pesos, tal como se describe en el tercer
capítulo. Para finalizar introduciremos el concepto de ratio de biodegradabilidad en el
método de reparto de los costes de contaminantes usando un sistema de pesos.
Una vez vistos todos los métodos anteriores con sus correspondientes soluciones
procederemos al análisis y comparación de los resultados, estableciendo cuando se debe
usar un método y no otro, a qué agentes le puede interesar uno y a cuales otros etc.
Por último, explicaremos el alcance de esta aplicación para la gran mayoría de
problemas de reparto de costes sobre ríos.
4.2.2 Modelado del problema
A continuación presentamos el modelo del problema. Para ello disponemos de la
siguiente representación.

Como se puede apreciar en la imagen, hemos asociado al río Kishon una
estructura tipo línea. Dicha estructura se ha divido en seis segmentos donde, en cada
uno de ellos se encuentra localizado un agente. Así pues, tenemos un conjunto de seis
agentes instalados en el curso del río, siendo el agente uno el situado aguas más arriba y
el agente seis el más cercano a la Bahía de Haifa.
Estos agentes representan varias industrias que son diferentes entre sí. Así, el
agente dos es una industria de productos químicos. Los agentes uno, tres y seis se
pueden agrupar en un conjunto de industrias petroquímicas. Por último, los agentes
cuatro y cinco son dos refinerías de petróleo.
Para cada agente aparecen dos variables c i , xi , siendo la primera de ellas el coste
de limpieza asociado al segmento i. La segunda variable representa la asignación del
reparto del coste correspondiente para el agente i. Dicha variable será la solución
proporcionada por los distintos métodos que se van a usar.
La operación de rehabilitación del río representa una suma total de 220 millones
de NIS. De este total, 60 millones de NIS quedan asignados a los cuatro ministerios ya
comentados: el Ministerio de Finanzas, el Ministerio de Protección del Medio

Ambiente, el Ministerio de Agricultura, y la Autoridad de los ríos. Los 160 millones de
NIS restantes van a ser los destinados a repartir entre todos los agentes que contribuyen
a la contaminación del río.
Notar que en la representación gráfica sólo aparecen las empresas que realizan
vertidos contaminantes al río sin tener en cuenta aquellas empresas “limpias” que no
suponen daño alguno para el río.
En el siguiente punto, se va a proceder a la resolución analítica del problema
para cada uno de los distintos métodos que se han indicado anteriormente. La resolución
consiste, básicamente en la obtención del vector de costes asignados que, como ya se ha
indicado, representa el valor, en millones de NIS, que cada empresa debe soportar para
realizar la operación de rehabilitación del río. Debido a la complejidad del ejemplo, se
van a estimar los datos de partida de la forma más lógica y admisible posible. Así, para
resolver la aplicación a través de los métodos LRS, UES y DES se va a suponer un
vector de costes de limpieza de todos los segmentos que forman la estructura del río. De
forma análoga, para los otros dos métodos restantes se va a asumir una matriz de pesos
cuadrada de orden seis y una matriz sobre ratios de biodegradabilidad para la resolución
del último método. Como ya veremos más adelante, a partir de la matriz de ratios de
biodegradación se obtendrá la matriz de pesos correspondiente y, una vez realizado esto,
procederemos de forma análoga a la realizada en el cuarto método.
4.2.3 Resolución analítica
Pasamos ahora a la resolución analítica de cada uno de los cuatro métodos ya
propuestos describiendo detenidamente como se han realizado cada uno por separado
hasta conseguir la asignación del vector de costes donde aparece la cantidad, en
millones de NIS, que cada agente debe afrontar para la rehabilitación del río.
4.2.3.1 Resolución usando el método LRS
Comenzamos con el método Local Responsability Sharing o método LRS. Este
método es el más simple de todos ya que implica una matemática muy sencilla. Como

consecuencia de esto, puede provocar una resolución en la asignación lejana a la
realidad, dando lugar a un posible reparto injusto entre todos los agentes.
Como ya indicamos anteriormente, los datos de partida van a ser estimados de la
forma más lógica y admisible posible. De esta forma, se supone conocido el siguiente
vector de costes de limpieza de contaminantes.
Agente
C i
(Coste de limpieza del
segmento correspondiente, en
millones de NIS)
%
(Respecto los 160 millones de
NIS)
1 40 25
2 6 3,7
3 40 25
4 17 10,625
5 17 10,625
6 40 25
Total 160 100
Así pues, C ( i )= (40,6,40,17,17,40 ) .
Como podemos apreciar en la tabla anterior, las empresas que más intervienen
en la contaminación del río son las industrias petroquímicas cuyos vertidos son los que
más hacen variar la composición de las aguas del río Kishon. Por esta razón el coste de
limpieza de su segmento es el más elevado, siendo 40 los millones necesarios para
limpiar los segmentos de río asociados a los agentes unos, tres y seis. El segundo tipo de
empresas que más contamina el río son las refinerías de petróleo. En este caso, se le han
asociado unos costes de 17 millones de NIS para la limpieza de los segmentos
correspondientes a los agentes cuatro y cinco. Ya por último, el agente dos,
correspondiente a la industria de los agente químicos es el que menos repercute sobre la
variación en el entorno medioambiental del río. Con este motivo, la asignación del coste
de limpieza de los contaminantes de su segmento es de 6 millones de NIS.
La resolución y, por lo tanto, la obtención del vector de asignación de costes
para el método LRS es muy sencilla. Para realizarla únicamente hay que tener en cuenta
que dicho método consiste en la asignación del coste de cada agente, es decir, se basa
única y exclusivamente en lo que cada agente ensucia o contamina. En otras palabras, la
asignación a cada agente corresponde a los costes de limpieza que cada agente debe
aportar para la rehabilitación del río.
Con este pretexto obtenemos la siguiente tabla de solución.
Agente
Asignación de coste
x iLRS
(millones de NIS)
1 40
2 6
3 40
4 17
5 17
6 40
Total 160
Por lo tanto, el vector solución de asignación es
X LRS=(40,6,40,17,17,40 ) .
Así pues, los agentes uno, tres y seis deben afrontar un pago cada uno de ellos de
40 millones de NIS, los agentes cuatro y cinco deben pagar 17 millones de NIS cada
uno y, finalmente, el agente dos debe aportar 6 millones de NIS.
4.2.3.2 Resolución usando el método UES
El segundo método de resolución es el Upstream Equal Sharing o método UES.
Este proceso también se construye a partir de una matemática sencilla. Como ya vimos
en el Capítulo 2, el método UES asigna costes a los agentes basándose en los costes
autónomos (que eran los únicos en los que se basaba el método LRS, los costes de
limpieza del segmento) más el reparto equitativo de los costes a los agentes situados
aguas abajo. En otras palabras, sea el agente tres con su correspondiente coste de
limpieza del segmento tres. Usar el método UES implica decir que el segmento tres está
contaminado de igual forma por los agentes situados aguas arriba que, en este caso,

serían los agentes uno y dos. Análogamente, la contaminación del segmento número
cuatro de nuestro ejemplo estará producida por los agentes uno, dos, tres y cuatro con
una implicación del 25% cada uno de ellos. Estos conceptos se consideran para cada
uno de los agentes de la red fluvial.
La expresión formal del método UES sería la siguiente:
x iUES (C )=1
ic i+
1i+1
ci+1+…+ 1n
cn, i=1,…,n.
Los datos de partida del proceso van a ser los mismos que para el caso anterior.
Así pues, se vuelven a usar las mimas estimaciones para el vector de costes de limpieza
de cada segmento:
Agente
C i
(Coste de limpieza del
segmento correspondiente, en
millones de NIS)
%
(Respecto los 160 millones de
NIS)
1 40 25
2 6 3,7
3 40 25
4 17 10,625
5 17 10,625
6 40 25
Total 160 100
Así pues, C ( i )= (40,6,40,17,17,40 ) .
Una vez que tengamos el vector de costes C (i ), ya somos capaces de desarrollar
el método UES y conseguir la asignación del vector de costes para cada agente. De esta
forma:
x1UES=C1+
C2
2+
C3
3+
C4
4+
C5
5+
C6
6=70,65 millones de NIS ,

x2UES=
C2
2+
C3
3+
C4
4+
C5
5+
C6
6=30,65 millones de NIS ,
x3UES=
C3
3+
C4
4+
C 5
5+
C6
6=27,65 millones de NIS ,
x4UES=
C4
4+
C5
5+
C6
6=14,31 millones de NIS ,
x5UES=
C5
5+
C6
6=10,01 millones de NIS ,
x6UES=
C6
6=6,67 millones de NIS .
Obteniendo la siguiente tabla solución:
Agente
Asignación de coste
x iUES
(millones de NIS)
1 70,65
2 30,65
3 27,65
4 14,31
5 10,01
6 6,67
Total 160
Por lo tanto el vector solución de asignación es
XUES=(70,65;30,65 ;27,65 ;14,31;10,01 ;6,67 ) .
Como se puede apreciar, este vector solución implica una asignación tanto
mayor cuando el agente este situado aguas más arriba, es decir, las empresas aguas
abajo tienen un coste aplicado mucho menor que las industrias situadas aguas arriba.

Este razonamiento esta acorde a las bases sobre las que se establece el método UES.
Así, el mayor costo asignado le pertenece al agente número uno ya que para todos los
segmentos del río aguas abajo (del segmento dos al seis) queda implicado de forma
equitativa.
4.2.3.3 Resolución usando el método DES
El tercer método de resolución es el Downstream Equal Sharing o método DES.
Este proceso también se construye a partir de una matemática sencilla. Como ya se
estudió en el Capítulo 2, el método DES asigna costes a los agentes basándose en los
costes autónomos (que eran los únicos en los que se basaba el método LRS, los costes de
limpieza del segmento) más el reparto equitativo de los costes a los agentes situados
aguas arriba. En otras palabras, sea el agente tres con su correspondiente coste de
limpieza del segmento tres. Usar el método DES implica decir que el segmento tres está
afectando de igual forma a los agentes situados aguas abajo que, en este caso, serían los
agentes cuatro, cinco y seis. Análogamente, la contaminación del segmento número
cuatro de nuestro ejemplo estará producida por los agentes cinco y seis con una
implicación del 33% cada uno de ellos. Estos conceptos se consideran para cada uno de
los agentes de la red fluvial.
La escritura formal del método DES sería la siguiente:
ϕ iDES (C )= ∑
j∈α ( {i })
c j
|σ ( { j })|, i=1 , …,n .
Los datos de partida del proceso van a ser los mismos que para el caso anterior.
Así pues, se vuelven a usar las mimas estimaciones para el vector de costes de limpieza
de cada segmento:
Agente
C i
(Coste de limpieza del
segmento correspondiente, en
millones de NIS)
%
(Respecto los 160 millones de
NIS)
1 40 25
2 6 3,7
3 40 25
4 17 10,625
5 17 10,625
6 40 25
Total 160 100
Así pues, C ( i )= (40,6,40,17,17,40 ) .
Una vez que tengamos el vector de costes C (i ), ya somos capaces de desarrollar
el método DES y conseguir la asignación del vector de costes para cada agente. De esta
forma:
x1DES=
C1
6=6,67millonesde NIS ,
x2DES=
C1
6+
C2
5=7,87 millones de NIS ,
x3DES=
C1
6+
C2
5+
C3
4=17,87 millonesde NIS ,
x4DES=
C1
6+
C2
5+
C3
4+
C4
3=23,53 millones de NIS ,
x5DES=
C1
6+
C2
5+
C 3
4+
C4
3+
C5
2=32,03 millonesde NIS ,
x6DES=
C1
6+
C2
5+
C3
4+
C4
3+
C5
2+C6=72,03 millones de NIS .
Obteniendo la siguiente tabla solución:
Agente
Asignación de coste
x iDES
(millones de NIS)

1 6,67
2 7,87
3 17,87
4 23,53
5 32,02
6 72,02
Total 160
Por lo tanto, el vector solución de asignación es
X DES=(6,67 ;7,87 ;17,87 ;23,53 ;32,02;72,02 )
Como se puede apreciar, este vector solución implica una asignación tanto
mayor cuando el agente esté situado aguas más abajo, es decir, las empresas aguas
arriba tienen un coste aplicado mucho menor que las industrias situadas aguas arriba.
Este razonamiento esta acorde a las bases sobre las que se establece el métodos DES.
Así, el mayor costo asignado le pertenece al agente número seis ya que para todos los
segmentos del río aguas arriba (del segmento uno al cinco) queda implicado de forma
equitativa.
4.2.3.4 Resolución a través de la utilización de un sistema de pesos
Vamos a ver ahora el cuarto método de resolución para nuestra aplicación. Este
método, junto al siguiente son completamente diferentes a los tres vistos hasta el
momento. Estos procesos se basan en la obtención de un sistema de pesos a través del
cual podremos calcular el vector solución de asignación.
Pasamos a estudiar detenidamente todos los pasos necesarios para obtener el
vector solución. Para ello, utilizamos la estructura, tipo línea, que hemos usado en los
casos anteriores y que representamos a continuación:

Los datos de partida necesarios para desarrollar el proceso ahora son dos
conjuntos. El primero de ellos, es el mismo que hemos visto en los métodos anteriores,
el vector de costes de limpieza de los distintos segmentos de río. Al igual que antes,
dicho vector ha sido estimado de la forma más lógica y admisible posible. De esta
forma, volvemos a tener el siguiente conjunto de datos:
Agente
C i
(Coste de limpieza del
segmento correspondiente, en
millones de NIS)
%
(Respecto los 160 millones de
NIS)
1 40 25
2 6 3,7
3 40 25

4 17 10,625
5 17 10,625
6 40 25
Total 160 100
Así pues, C ( i )= (40,6,40,17,17,40 ) .
El segundo conjunto de datos necesario para el desarrollo del método es un
sistema de pesos, ( pij ). Dicho sistema de pesos está formado por una matriz cuadrada de
orden n, donde n representa el número de agentes instalados en el curso del río que, para
nuestro caso es seis. Así pues, nuestro sistema de pesos va a consistir en una matriz
cuadrada de orden seis.
Expliquemos ahora el sentido físico de cada variable que forma la matriz. Como
ya hemos indicado, al disponer de una matriz cuadrada de orden seis, vamos a trabajar
con un total de 36 pesos o variables. De forma genérica, la variable pij representa el
peso de la contaminación del segmento j, debida única y exclusivamente al agente i. De
esta forma, un valor de p13=0,05 significa que el 5% de la contaminación sufrida en el
segmento tres es causada exclusivamente por el agente uno.
Debido a la elevada complejidad que supondría disponer de cada uno de los 36
pesos necesarios, se ha realizado una estimación sobre los posibles pesos a lo largo de
toda la red fluvial.
De esta forma, hemos conseguido un sistema de pesos que viene representado
por la siguiente matriz:
( pij )=(
1,00 0,00 0,000,12 0,86 0,000,05 0,10 0,85
0,00 0,00 0,000,00 0,00 0,000,00 0,00 0,00
0,03 0,03 0,090,02 0,03 0,040,01 0,01 0,01
0,85 0,00 0,000,08 0,87 0,000,02 0,02 0,93
) .
Donde la primera fila representa la repercusión de cada agente sobre la
contaminación del segmento uno. Así, podemos afirmar que la contaminación sufrida en

el segmento uno es debida 100% al agente uno. La suma total de la fila representa el
100% de la contaminación de dicho segmento. El razonamiento para las demás filas es
totalmente análogo. Si queremos ver el significado por columnas, para la primera
columna de la matriz se puede apreciar que el 100% de la contaminación del segmento
uno recae sobre su propio agente, el 12% de la contaminación del segundo segmento, el
5% de la contaminación del tercer segmento, el 3% del cuarto, el 2% del quinto y el 1%
del sexto, todos ellos recaen sobre el agente uno. El razonamiento para el resto de las
columnas se realizaría de forma análoga.
Notar que el sistema de pesos tiene varios elementos nulos, de hecho, la matriz
es triangular inferior. Esta asignación es totalmente razonable ya que, como el sentido
de la corriente de agua es siempre el mismo, (el agua siempre va río abajo) los vertidos
de cualquier agente no pueden contaminar segmentos situados aguas arriba. Es decir, los
vertidos del agente tres, por ejemplo, nunca podrán afectar a los segmentos unos o dos,
lógicamente.
Hay que tener en cuenta que la complejidad de este método, tanto la resolución
matemática como la propia obtención de datos crece de forma exponencial cuanto
mayor sea el número de agentes situados a lo largo del curso del rio. Por ejemplo si en
lugar de trabajar con 6 agentes (y por lo tanto 36 variables en el sistema de pesos)
trabajásemos con 10, necesitaríamos un total de 100 variables para poder definir nuestro
sistema de pesos. Si es verdad que, a pesar de la mayor complejidad, hoy en día no
representa mucha dificultad pues, este método se puede implementar fácilmente en
cualquier programa de resolución numérica como Matlab, por ejemplo.
Una vez obtenidos los dos conjuntos de datos de partida, ya podemos calcular el
vector solución de asignación de costes. Para ello, simplemente tenemos que realizar la
multiplicación matricial entre el vector de costes dato y el sistema de pesos, es decir
X (i )=C (i ) ∙( p ij ) .
De esta forma:
X1=(C 1∙ p11)+(C2 ∙ p1
2 )+(C3 ∙ p13 )+(C4 ∙ p1
4 )+(C5 ∙ p15 )+(C6 ∙ p1
6 )=¿ 43,97 millones de NIS ,
X2=(C 1∙ p21)+(C2 ∙ p2
2 )+(C3 ∙ p23 )+(C4 ∙ p2
4 )+(C5 ∙ p25 )+(C6 ∙ p2
6)=¿10,58 millones de NIS ,

X3=(C 1∙ p31 )+(C2∙ p3
2 )+(C3 ∙ p33 )+(C4 ∙ p3
4 )+(C5 ∙ p35 )+(C6 ∙ p3
6 )=¿36,61 millonesde NIS ,
X 4=(C1 ∙ p41 )+(C2∙ p4
2 )+(C 3∙ p43 )+ (C4 ∙ p4
4 )+(C 5 ∙ p45 )+(C6 ∙ p4
6 )=¿16,61 millones de NIS ,
X5=(C 1∙ p51 )+(C2∙ p5
2 )+(C3 ∙ p53 )+(C4 ∙ p5
4 )+(C5 ∙ p55 )+(C6 ∙ p5
6 )=¿15,59 millones de NIS ,
X L=(C1 ∙ p61 )+(C2 ∙ p6
2 )+(C3 ∙ p63 )+(C4 ∙ p6
4 )+(C5 ∙ p65 )+(C6 ∙ p6
6 )=¿37,2millones de NIS .
Obteniendo la siguiente tabla solución:
Agente
Asignación de coste
x i
(millones de NIS)
1 43,97
2 10,58
3 36,61
4 16,61
5 15,59
6 37,2
Total 160
Por lo tanto, el vector solución de asignación es
X pij
= (43,97 ;10,58 ;36,61;16,61 ;15,59;37,2 ) .
Este vector, nos ofrece una nueva solución cuya asignación depende de los
valores de las variables que forman nuestro sistema de pesos.
4.2.3.5 Resolución usando el ratio de biodegradabilidad. Sistema de pesos
Pasamos ahora a estudiar el último método de resolución para nuestra aplicación
sobre el río Kishon. En este proceso, se va a obtener el vector de asignación asociado a
nuestra aplicación teniendo en cuenta los efectos de aplicar el ratio de biodegradación δ
. Dicho concepto se introdujo en el Capítulo 4 del presente proyecto como una solución
alternativa introducida por Gómez-Rúa (2008).
El ratio de biodegradabilidad es un factor acotado entre cero y la unidad. La
limitación inferior se interpreta como un contaminante biodegradable, es decir que
desaparece por completo con el paso del tiempo. La limitación superior implicará que el
contaminante no es biodegradable.
En realidad, este método podría no haberse considerado como un cuarto proceso
de resolución. Dicho método puede ser entendido como una modificación del cuarto
donde, a partir de un sistema de pesos y unas consideraciones sobre la matriz asociada
al ratio de biodegradabilidad, vamos a obtener un sistema de pesos modificado con el
que, finalmente, obtendremos el vector solución de asignación.
Así pues, el primer conjunto de datos necesario va a ser el mismo que para cada
proceso ya visto. El vector de costes de limpieza de cada tramo de la red fluvial es:
Agente
C i
(Coste de limpieza del
segmento correspondiente, en
millones de NIS)
%
(Respecto los 160 millones de
NIS)
1 40 25
2 6 3,7
3 40 25
4 17 10,625
5 17 10,625
6 40 25
Total 160 100
Con lo que, C ( i )= (40,6,40,17,17,40 ) .
Para continuar, vamos a considerar la modificación del sistema de pesos
asociado al caso anterior, es decir, las modificaciones oportunas al tener en cuenta los
efectos producidos por una matriz que definiremos más adelante sobre los diferentes
tipos de contaminantes con distintos ratios de biodegradabilidad.
Rescribimos el sistema de pesos del tercer caso que era:
( pij )=(
1,00 0,00 0,000,12 0,86 0,000,05 0,10 0,85
0,00 0,00 0,000,00 0,00 0,000,00 0,00 0,00
0,03 0,03 0,090,02 0,03 0,040,01 0,01 0,01
0,85 0,00 0,000,08 0,87 0,000,02 0,02 0,93
) .
Donde el significado de cada una de las variables quedo definido en el punto
anterior.
El siguiente paso consiste en definir la matriz de biodegradación, δ j−i . Al igual
que la matriz del sistema de pesos, va a consistir en una matriz cuadrada de orden n,
siendo n el número de agentes que contribuyen a la contaminación de la red fluvial. Por
lo tanto, vamos a volver a tener un total de 36 variables nuevas asociadas a cada agente
y a cada segmento. Para cualquier variable δ j−i, su significado físico es “el ratio de
biodegradabilidad asociado al segmento j por el agente i”.
Debido a la gran complejidad para poder determinar dicha matriz de
biodegradabilidad, hemos asumido la siguiente solución admisible.
(δ j−i )=(1,00 0,00 0,001,00 0,50 0,001,00 0,50 1,00
0,00 0,00 0,000,00 0,00 0,000,00 0,00 0,00
1,00 0,50 1,001,00 0,50 1,001,00 0,50 1,00
0,80 0,00 0,000,80 0,80 0,000,80 0,80 1,00
) .

Como podemos apreciar, la matriz de ratios de biodegradabilidad tiene una
forma un poco característica. Esta matriz, como se muestra arriba, es triangular inferior
por los mismos motivos que lo era el sistema de pesos ya que, como el sentido de la
corriente del agua es siempre el mismo, (el agua siempre va río abajo) los vertidos de
cualquier agente no pueden contaminar segmentos situados aguas arriba. Cada columna
de la matriz está asociada a un agente mientras que cada fila representa un segmento.
Por ese motivo, los elementos de cada columna (distinto de cero) tienen el mismo valor.
Así, por ejemplo, los valores de la columna uno representan que la contaminación
vertida por el agente uno a la red fluvial no es biodegradable. La explicación para el
resto de las columnas es totalmente análoga. Debido a que todas las empresas no son del
mismo tipo, aparecen valores distintos en la matriz. Hemos considerado tres grupos
diferentes de empresas. Para las industrias petroquímicas (correspondientes a las
columnas una, tres y seis) hemos considerado un ratio de biodegradabilidad igual a la
unidad, es decir, no son biodegradables. Por otra parte, las refinerías de petróleo
(correspondientes con las columnas cuatro y cinco) tienen un ratio de biodegradabilidad
de 0,8. Por último, hemos considerado un ratio de biodegradabilidad de 0,5 para las
industrias químicas.
Una vez que disponemos de la matriz de ratios de biodegradación, podemos
calcular un sistema de pesos modificado (pero no definitivo) mediante la siguiente
relación,
( pij )¿=δ j−i ∙( p i
j ) .
Operando
obtenemos
Así pues,
( pij )¿=(
1,00 0,00 0,001,06 0,43 0,001,11 0,53 0,85
0,00 0,00 0,000,00 0,00 0,000,00 0,00 0,00
1,13 0,55 0,921,15 0,58 0,951,16 0,59 0,96
0,68 0,00 0,000,74 0,70 0,000,76 0,72 0,93
).Este sistema de pesos no es el definitivo ya que no cumple una de las
propiedades características de un sistema de pesos, la suma por filas ha de ser la unidad
en cada una de ellas. De este modo, volvemos a realizar una modificación al sistema de
pesos ponderando cada una de las filas obteniendo finalmente:
( pij )
¿∗¿=(1,00 0,00 0,000,71 0,29 0,000,45 0,21 0,34
0,00 0,00 0,000,00 0,00 0,000,00 0,00 0,00
0,34 0,17 0,280,28 0,14 0,230,22 0,12 0,19
0,21 0,00 0,000,18 0,17 0,000,15 0,14 0,18
).¿
Una vez tengamos el sistema de pesos modificado definitivo, ya podemos
calcular el vector solución de asignación de costes. Para ello, simplemente tenemos que
realizar la multiplicación matricial entre el vector de costes dato y el sistema de pesos,
es decir,
X (i )=C (i ) ∙ ( p ij )¿∗¿ .¿
De esta forma,

Obteniendo la siguiente tabla solución:
Agente
Asignación de coste
x iBR
(millones de NIS)
1 82,60
2 20,21
3 29,87
4 12,63
5 8,49
6 7,20
Total 160
Por lo tanto, el vector solución de asignación es
X B R=(82,60 ;20,21;29,87 ;12,63 ;8,49 ;7,20 ) .
Este vector, nos ofrece una nueva solución cuya asignación depende de los valores de
las variables que forman nuestro sistema de pesos considerando los efectos asociados al
ratio de biodegradabilidad.

4.2.4 Comentarios de las soluciones obtenidas
Hasta ahora hemos visto cinco formas diferentes de realizar el reparto de los
costes de limpieza entre todos los agentes instalados en el curso de un río y que
intervienen en la contaminación del mismo.
Primero hemos estudiado el método LRS (Local Responsability Sharing). Dicho
método se basaba en hacer responsables a cada agente de su propia contaminación. El
segundo método estudiado fue el UES (Upstream Equal Sharing). En esta alternativa,
para un segmento cualquiera, se le asociaba un coste al agente teniendo en cuenta un
reparto equitativo entre todos las industrias aguas arriba. El tercer método estudiado fue
el DES (Upstream Equal Sharing). Es un método muy similar al anterior. Ahora, para
un segmento cualquiera, se le asocia un coste al agente teniendo en cuenta un reparto
equitativo entre todos las industrias aguas abajo. En el cuarto método introdujimos el
concepto de sistema de pesos y lo aplicamos para obtener un reparto en la asignación de
costes. Por último, hemos estudiado un método basado en la creación de un sistema de
pesos a partir de consideraciones tomadas según el ratio de biodegradabilidad, concepto
creado para diferenciar de algún modo los distintos tipos de residuos que se vierten al
río.
Presentamos a continuación una tabla resumen donde aparecen todas las
asignaciones asociadas a cada método de reparto propuesto.
Agentes
contaminantes
LRS
Coste
repartidos
(MNIS)
UES
Coste
repartidos
(MNIS)
DES
Coste
repartidos
(MNIS)
S. Pesos
Coste
repartidos
(MNIS)
BR
Coste
repartidos
(MNIS)
1 40 70,65 6,67 43,97 82,60
2 6 30,65 7,87 10,58 20,21
3 40 27,65 17,87 36,61 29,87
4 17 14,31 23,53 16,61 12,63
5 17 10,01 32,02 15,59 8,49
6 40 6,67 72,02 37,2 7,20
Total 160 160 160 160 160

Comentemos ahora los resultados de cada proceso viendo qué agentes pueden
estar interesados en cada uno de ellos y a quienes les podría perjudicar en exceso.
Empecemos con el método LRS. Como indicamos en la resolución, este método
es el más simple pues a cada agente le asignamos única y exclusivamente un coste que
sólo considera la cantidad que vierte al río. La ventaja de este método es que podemos
obtener rápidamente un reparto para cada uno de los agentes que contaminan el río. La
desventaja principal es que, si consideramos este método, no estamos teniendo en
cuenta la porción de río que contamina cada agente. De esta forma, si suponemos un
caso donde dos agentes, uno situado en la zona más alta del río y otro en la zona media
del mismo, que contaminan por igual, la aplicación de este método implicaría el mismo
reparto para cada uno de los dos agentes. Sin embargo, como se puede apreciar, el
agente situado aguas más arriba del río esta contaminando muchos más territorio que el
agente situado en una zona intermedia. Por tanto, este reparto puede beneficiar a los
agentes situados aguas más arriba mientras que a los agentes situados en las zonas mas
bajas del río se le asignarían unos costes más elevados de los que realmente les
pertenecen.
El segundo método es el método UES. En este método, ya empezamos a tener en
cuenta la porción de río que cada agente contamina. La forma por la cual empezamos a
tener en cuenta dicho aspecto es la más simple posible. Así, la asignación del coste
asociado a cualquier agente dependerá del reparto equitativo de la limpieza de su
segmento entre él y todos los agentes situados aguas abajo. Por ejemplo, el coste
asignado al agente tres será la tercera parte del coste de limpieza del tercer segmento
(pues a dicho segmento le llega contaminación de los agentes uno, dos y tres) más la
cuarta parte del coste de limpieza del cuarto segmento más… así sucesivamente hasta
llegar al agente situado aguas más abajo. Este método, ofrece un reparto más justo para
nuestro caso donde se penalizan más a los agentes situados aguas arriba con unos costes
asociados más altos de los producidos mientras que, por otro lado, se benefician los
agentes situados en las zonas más bajas.
El tercer método es el método DES. En este método también tenemos en cuenta
la porción de río que cada agente contamina. La forma por la cual se tiene en cuenta
dicho aspecto es igual al caso anterior. Así, la asignación del coste asociado a cualquier
agente dependerá del reparto equitativo de la limpieza de su segmento entre él y todos
los agentes situados aguas arriba. Por ejemplo, el coste asignado al agente tres será la

sexta parte del coste de limpieza del primer segmento más la quinta parte del coste de
limpieza del segundo segmento más la cuarta parte del coste de limpieza del tercer
segmento.. Para nuestro caso, se penalizarán más a los agentes situados aguas abajo con
unos costes asociados más altos de los producidos mientras que, por otro lado, se
benefician los agentes situados en las zonas más altas.
El cuarto método es el basado en la creación de un sistema de pesos para la
obtención del vector solución de asignación. Por lo tanto, este método puede ser
considerado una mejora del anterior donde ya no se limita a imponer un reparto
equitativo en la contaminación de cada segmento a manos de los agentes situados aguas
arriba. Ahora, en cambio, este reparto de pesos viene determinado por una matriz de
pesos donde se tiene en cuenta la proporción o el peso, en cada segmento, ocasionado
por cada agente. Es decir, en esta matriz aparece la información necesaria para saber la
repercusión de cada agente en la contaminación de cada segmento. La solución obtenida
será pues más precisa que la proporcionada por el caso anterior aunque hay que tener en
cuenta que todo depende de la toma de datos y, por lo tanto, de la obtención de la matriz
de pesos. Así, una matriz de pesos muy imprecisa proporcionará una solución en el
reparto injusta mientras que una matriz muy cercana a la realidad proporcionará un
mejor reparto. La solución obtenida en nuestro caso penaliza ligeramente a los agentes
situados aguas arriba mientras que beneficia un poco al resto de empresas.
Por último, el quinto método de resolución, como indicamos anteriormente,
puede ser considerado como una modificación del anterior. En este caso, se tiene en
cuenta la influencia de considerar empresas de distintos tipos, cuyos vertidos no tienen
por qué afectar de la misma forma en el territorio ya que, habrá empresas que
contaminen más que otras. Con este pretexto, definimos la matriz de ratios de
biodegradación que, junto con una matriz de pesos como la del cuarto método se
utilizan para obtener una matriz de pesos finales donde la información que aparece es la
misma que para el caso anterior con la diferencia de que, en ésta se han tenido en cuenta
los efectos asociados al ratio de biodegradación. La precisión de los resultados
dependerá, por tanto, de la precisión de los datos tanto para la matriz del sistema de
pesos como la correspondiente al ratio de biodegradabilidad.
Por tanto, todos los métodos tienen ventajas y desventajas ya que los términos de
precisión y complejidad siguen distintas trayectorias y, por ello, un método muy
sencillo de computar será bastante impreciso mientras que un método de gran
complejidad (matemática o simplemente en la toma de datos) de ejecución tendrá mayor

precisión. La solución de compromiso es una opción intermedia que en nuestro caso,
podría ser la segunda o cuarta opción dependiendo siempre de la aplicación a tratar y de
la toma de datos. Notar que la mejor aplicación para el tercer método es en problemas
de reparto de costes de inundación ya que nuestra aplicación se centra en el reparto de
los costes de limpieza de contaminación de un río, dicho método no debe tenerse en
cuenta pues no representará nunca una solución justa en la asignación de los diversos
costes.
4.2.5 Alcance del proyecto
A lo largo del proyecto hemos estudiado el reparto en estructuras tipo árbol. En
particular, nos hemos centrado en, la estructura tipo línea y la estructura en forma de Y,
que disponía de un nodo especial al que denominamos nodo lago. En la actualidad, se
han desarrollado métodos para tratar una gran diversidad de estructuras con hasta
múltiples ramificaciones. En el proyecto no se han profundizado en este tipo de
estructuras ya que nos hemos centrado en la resolución del problema de reparto de los
costes de limpieza de un río contaminado. Por este motivo hemos realizado una
búsqueda que recopila diversa información sobre los ríos más contaminados del planeta.
Vamos a ver como la estructura de la gran mayoría de esos río son tipo línea
justificando la resolución de nuestra aplicación sobre el río Kishon con una estructura
tipo línea.
Comentemos brevemente las características principales de alguno de los ríos
más contaminados del planeta.
El primer río del que nos ocupamos es el río Ganges. El río nace en el Himalaya
occidental, en el estado indio de Uttarakhand, y tras 2510 km de recorrido desemboca
formando, con el río Brahmaputra el mayor delta del mundo, el delta del Ganges, en el
golfo de Bengala. La polución del río Ganges se ha incrementado de forma alarmante en
los últimos años. Los productos que lo contaminan incluyen restos de las cremaciones
humanas, esqueletos de animales, aguas residuales y desperdicios de las fábricas. A esto
hay que añadirle incluso de que no es extraño encontrar cadáveres enteros de personas y
animales flotando en sus aguas. Han existido diversos intentos de limpiar el Ganges
pero, hasta el momento, todos han fracasado o han ocasionado problemas mayores. Su
trazado geográfico se aprecia en la siguiente imagen donde su estructura se puede
modelar como una de tipo línea.

A continuación nos ocupamos del río Colorado. El río Colorado cruza el suroeste de
los Estados Unidos y noroeste de México. Su longitud es aproximadamente de 2333 km.
Irriga gran parte de las llanuras desérticas de los estados de Colorado, Utah, Arizona,
Nevada, California, Baja California y Sonora, estos dos últimos en México. Nace al pie
de las Montañas Rocosas en el estado de Colorado. Este río esta contaminado por
diferentes factores, algunos de ellos son hidrocarburos, desechos de cloaca y desechos
de refrigerantes. También esta ligeramente contaminado por derrames de petróleo. Otra
causa, aunque muy extraña, es el exceso de sal. Por último, otro problema es también la
minería de potasio y otros químicos contaminantes. Su estructura se puede modelar
como tipo línea tal como se puede apreciar en la siguiente imagen.
Otro caso interesante es el río Lerma. El río Lerma es un largo río de México, el
más largo de los ríos interiores. Se origina en los manantiales de Almoloya del Río, en
el estado de México, atraviesa hacia el noroeste del Valle de Toluca, y desagua en el
lago de Chapala. Tiene una longitud de 708 km y drena una cuenca de 47 116 km. El

Río Lerma ha sido materia de exhaustivas investigaciones, algunas de ellas realizadas
por especialistas, quienes reconocieron la existencia de metales pesados como el plomo.
Además, se detectaron grandes cantidades de desechos fecales de distintos tipos de
ganado. También se encontró grandes cantidades de hidrocarburos, metales pesados,
fertilizantes pesticidas bases y compuestos orgánicos. En la siguiente imagen aparece el
emplazamiento geográfico del río.
Otro de los ríos más
contaminados del
mundo es el río Bogotá. El
río Bogotá es uno de los ríos
más importantes del departamento de Cundinamarca, a pesar de no ser un río navegable
ni especialmente caudaloso, es uno de los afluentes del Magdalena. La cuenca del
Bogotá alberga cerca de nueve millones de personas, incluidos los ocho millones y
medio de habitantes de la ciudad de Bogotá. Tiene una longitud aproximada de 380 km.
Si bien el río Bogotá no es el más contaminado del mundo, sí tiene muy altos niveles de
sustancias contaminantes y a su paso por la ciudad de Bogotá es un río muerto. Entre los
contaminantes que lleva su curso están el cadmio, el cromo, el mercurio, el zinc, el
arsénico y el plomo. El punto máximo de contaminación del río está en sectores de
Bogotá donde el nivel de residuos sólidos puede alcanzar hasta 400 mg/L. Este río
vuelve a tener una estructura tipo línea como se puede apreciar en la siguiente imagen.

El siguiente río del que vamos a hablar es el río Salween. El río Salween es un
río bastante largo que discurre por el Sureste Asiático. Nace al este del Tíbet, fluyendo
generalmente hacia el sur durante casi 2400 km a través de la provincia de Yunnan,
China, y al este de Birmania, desembocando en el golfo de Martaban del mar de
Andamán en Mawlamyaing. Este rio está contaminado por sustancias tóxicas como el
azufre y también de desechos de cloaca. Otras sustancias contaminantes de este río son
los desechos materiales de las fábricas y de las industrias textiles. El rio Salween es el
único que supera en contaminación al rio de la plata. A continuación vemos un mapa de
su situación geográfica.
El último río del que vamos a hablar es el río Amarillo. El río Amarillo es, con
5464 km, el segundo curso fluvial más largo de China, sólo superado por el Yangtsé, y
el sexto de la Tierra. El río Amarillo está sufriendo una seria contaminación. El 60 por
ciento de sus aguas es utilizado en actividades humanas y económicas. Sabiendo que el
límite reconocido internacionalmente es de un coeficiente del 40 por ciento para el
uso de las aguas de ríos, el río Amarillo está altamente contaminado por desechos
orgánicos y humanos, lo que hace que el afluente tome ese color amarillento.

Toda la información relacionada con el río Kishon ha sido obtenida de
diferentes fuentes. A continuación se exponen los enlaces consultados.
Información para la Sección 4.2
http://translate.google.es/translate?hl=es&sl=en&u=http://www.explainthatstuff.com/
waterpollution.html&ei=Ke40T62EBIiu8AOC9L2fAg&sa=X&oi=translate&ct=result&resnum=8&ved=0CGUQ7gEwBw&prev=/
search%3Fq%3Driver%2Bpolluted,%2Bcleaner%2Bcost%26hl%3Des%26client%3Dfirefox-a%26rls%3Dorg.mozilla:es-
ES:official%26channel%3Dnp%26biw%3D1920%26bih%3D866%26prmd%3Dimvns
http://en.wikipedia.org/wiki/Kishon_River
http://translate.google.es/translate?hl=es&sl=en&u=http://en.wikipedia.org/wiki/Kishon_River&ei=Sfc0T9HHCoXT-
gbbotX0AQ&sa=X&oi=translate&ct=result&resnum=1&ved=0CD0Q7gEwAA&prev=/search%3Fq%3Dkishon%2Briver%26hl
%3Des%26client%3Dfirefox-a%26hs%3Dgs9%26rls%3Dorg.mozilla:es-ES:official%26channel%3Dnp%26prmd%3Dimvns
http://translate.google.es/translate?hl=es&sl=en&u=http://www.biblewalks.com/Sites/KishonRiver.html&ei=Sfc0T9HHCoXT-
gbbotX0AQ&sa=X&oi=translate&ct=result&resnum=2&ved=0CEYQ7gEwAQ&prev=/search%3Fq%3Dkishon%2Briver%26hl
%3Des%26client%3Dfirefox-a%26hs%3Dgs9%26rls%3Dorg.mozilla:es-ES:official%26channel%3Dnp%26prmd%3Dimvns
http://translate.google.es/translate?hl=es&sl=en&u=http://www.israel21c.org/environment/kishon-river-from-poison-to-
pristine&ei=Sfc0T9HHCoXT-gbbotX0AQ&sa=X&oi=translate&ct=result&resnum=7&ved=0CGEQ7gEwBg&prev=/search%3Fq
%3Dkishon%2Briver%26hl%3Des%26client%3Dfirefox-a%26hs%3Dgs9%26rls%3Dorg.mozilla:es-ES:official%26channel%3Dnp
%26prmd%3Dimvns
http://translate.google.es/translate?hl=es&sl=en&u=http://www.haaretz.com/print-edition/news/kishon-river-clean-up-project-
lacking-funding-1.407500&ei=9Pg0T6-
dN8Gq8QOAvsiXCQ&sa=X&oi=translate&ct=result&resnum=2&ved=0CEEQ7gEwAQ&prev=/search%3Fq%3Dkishon%2Briver
%26hl%3Des%26client%3Dfirefox-a%26sa%3DX%26rls%3Dorg.mozilla:es-ES:official%26channel%3Dnp%26biw
%3D1920%26bih%3D866%26tbs%3Dqdr:m%26prmd%3Dimvns
http://www.deisrael.com/contentid-52.html
Información para la Sección 4.2.5:
http://stylusa.com.over-blog.es/article-30374971.html

4.3 Restauración del entorno ecológico del lago Bai Yang Dian
El propósito de esta sección esaplicar de nuevo los métodos de reparto de costes
propuestos anteriormente a un problema del mundo real. Para ello, consideraremos un
ejemplo sobre un proyecto a cargo del Asian Development Bank (ADB) en China. El
objetivo del proyecto asignado es restaurar el entorno ecológico de un lago muy
contaminado, el Bai Yang Dian en la provincia de Hebei, al norte de China.
En este ejemplo, aplicaremos nuestros modelos de reparto de costes sobre una
estructura tipo árbol a problemas sobre grafos acíclicos. Esta consideración es
importante porque en muchas aplicaciones del mundo real los agentes no pueden ser
conectados por una estructura tipo árbol pero, raramente no puede ser conectado en los
grafos de este tipo (acíclicos). Por ejemplo, en la red fluvial, un agente situado aguas
arriba puede disponer de dos canales del río que fluye hacia el lago. Con mayor
importancia, en un grafo acíclico, no tenemos la necesidad de crear el nodo especial
denominado Lago pues este ya no es necesario. En realidad, todo lo que necesitamos
está bien definido por las relaciones aguas arriba y aguas abajo. Para los grafos
acíclicos, estas relaciones están bien especificadas.
4.3.1 Una breve reseña

La actuación del ADB pretende proporcionar una ayuda a los municipios y
países locales en el reparto de los costes de limpieza de la contaminación del lago en la
provincia de Hebei, al norte de China. La responsabilidad puede ser propiamente
distribuida entre todos los gobiernos locales una vez que el coste sea asignado.
Específicamente, el interés del proyecto pretende conservar el medioambiente en
la zona del lago de China. Este lago solía ser muy grande pero debido a la explotación
de agua que ha sufrido por parte de los afluentes y del propio lago, esta ha permanecido
casi seco desde 1980 hasta 1987. Después de esto, el lago fue víctima de severas sequías
y el Ministerio Chino sobre los recursos de agua tuvo que intervenir ordenando a los
gobiernos locales a descargar agua de reservorios aguas arriba con el objetivo de
mantenerlo.
El siguiente diagrama muestra la estructura geográfica del proyecto.
Figura 2
En la figura, los nodos 1 y 3 son reservorios y los nodos 2,4 y 5 son ciudades. El
nodo L es el lago Bai Yang Dian.
Además de la sequía de agua, el lago sufre una seria contaminación. Con un
rápido crecimiento económico de las áreas perimetrales, particularmente con el aumento
de la industria del cuero, se incrementa la generación de potencia y la fabricación de
papel. Los residuos generados por estas industrias no reciben un tratamiento necesario
siendo arrojados directamente a los ríos o incluso a los lagos.
En 2003, el lago estaba seriamente contaminado, los peces morían por la
contaminación del agua, atrayendo la atención de los medios causando grandes críticas.
Ante esta situación, el gobierno desplazo 150 millones de metros cúbicos de agua
procedentes de los reservorios 1 y 3 para poder diluir los contaminantes. Sin embargo,

en lugar de obtener una mejora del lago, más peces seguían apareciendo muertos porque
la corriente de agua de la rama formada por los nodos 1,2,5 arrastró gran parte de los
residuos estancados hacia el lago, dañándolo más todavía. Si no se hubiese realizado
esta acción, los residuos del nodo 2 hubiesen sido absorbidos por la tierra dañando esta
y no el lago.
Sin embargo, si el gobierno usa únicamente el agua procedente del reservorio
situado en el nodo 3, no sería una buena solución ya que es relativamente pequeño y
solo puede abastecer al municipio de Baoding, nodo 4 del diagrama. Además, en el
ramal 1-2-5 tiene jurisdicción el municipio de Shijiazhuang, luego el uso de agua no
puede ser controlado por el nodo 4.
Con todos estos hechos, el gobierno de Baoding (situado sobre el nodo 4)
propuso un proyecto de enlace para conectar los dos reservorios de los nodos 1 y 3 y así
el reservorio 1 podría ser usado para diluir la contaminación del lago y satisfacer por
completo la demanda de agua al mismo tiempo.
El coste del proyecto ascendería a 24 millones de dólares. Sin embargo los
beneficios ayudarían a disminuir la contaminación del lago con el agua procedente del
ramal 1-3-4-5, así como ofrecer una mayor garantía del abastecimiento de agua a la
ciudad de Baoding. Si el canal de enlace no se fabricase, otra alternativa podría ser la
construcción de una planta de tratamiento de aguas en el nodo 2 lo que pararía la
contaminación del lago por el ramal 1-2-5. Sin embargo, la construcción de esta planta
es costosa (mucho mayor que la construcción del canal de enlace) y, lógicamente, la
ciudad situada sobre el nodo 2 no quiere soportar estos costes de la EDAR.
Para resolver el problema de reparto de costes del lago se deben considerar las
siguientes recomendaciones. El proyecto del canal de enlace que conecta los reservorios
1 y 3 debe ser construido y sus costes de construcción deben ser tratados como costes de
limpieza de contaminantes y estos deben ser repartidos entre todas las ciudades que
están involucradas. Además, los costes asociados con todos los canales del río, así
como, los costes de limpieza del lago deben ser repartidos entre todos los agentes de la
red fluvial.
De aquí, el problema puede ser modelado como un problema de reparto de
costes sobre un grafo acíclico. En este problema, tenemos una estructura de permisión P
tal que,

P (1 )=∅ , P (2 )= {1 }, P (3 )={1 } ,
P (4 )= {3 }, P (5 )={2,4 }, P ( L )={5 } .
Los juegos autónomos son los siguientes,
P (1 )=∅ , P (2 )= {1 }, P (3 )={1 } ,
P (4 )= {1,3 } , P (5 )={1,2,3,4 }, P (L )={1,2,3,4,5 } .
P−1 (1 )= {2,3,4,5 , L }, P−1 (2 )= {5 , L } , P−1 (3 )= {4,5 , L },
P−1 (4 )= {5 , L } , P−1 (5 )= {L }, P−1 ( L )={∅ }.
Además del juego autónomo, podemos definir los dos juegos siguientes. Notar
que en estos juegos algunos valores de las coaliciones, no van a aparecer en la lista pero
pueden ser deducidos fácilmente.
El juego orientado aguas arriba LU (C )
LU (C ) (1 )=C (1,2,3,4,5 , L ) , LU (C ) (2 )=C (2,5, L ) , LU (C ) (3 )=C (3,4,5 , L ) ,
LU (C ) (4 )=C ( 4,5 , L ) , LU (C ) (5 )=C (5 , L ) , LU (C ) ( L )=C (L ) ,
LU (C ) (1,2 )=C (1,2,3,4,5 , L ) , LU (C ) (1,3 )=C (1,2,3,4,5, L ) ,
LU (C ) (2,3 )=C (2,3,4,5 , L ) , , LU (C ) (2,5 )=C (2,5 , L ) ,
LU (C ) (1,2,3 )=C (1,2,3,4,5 , L ) ,LU (C ) (1,2,4 )=C (1,2,4,5 , L ) ,
LU (C ) (1,2,3,4 )=C (1,2,3,4,5 , L ) , LU (C ) (1,2,3,4,5 )=C (1,2,3,4,5 , L ) .
El juego orientado aguas abajo LD (C )
LD (C ) (1 )=C (1 ) , LD (C ) (2 )=C (1,2 ) , LD (C ) (3 )=C (1,3 ) , LD (C ) (4 )=C (1,3,4 ) ,
LD (C ) (5 )=C (1,2,3,4,5 ) , LD (C ) (L )=C (1,2,3,4,5 , L ) ,
LD (C ) (1,2 )=C (1,2 ) , LD (C ) (1,5 )=C (1,2,3,4,5 ) , LD (C ) (1 , L )=C (1,2,3,4,5 , L ) ,
LD (C ) (1,2,4 )=C (1,2,3,4 ) , LD (C ) (2,3,5 )=C (1,2,3,4,5 ) ,

LD (C ) (3,4,5 )=C (1,2,3,4,5 ) , LD (C ) (3,5 , L )=C (1,2,3,4,5, L ) ,
LD (C ) (1,2,3,4 )=C (1,2,3,4 ) , LD (C ) (1,2,3,4,5 , L )=C (1,2,3,4,5 , L ).
4.3.2 Soluciones analíticas
Para resolver el problema de reparto de costes descrito, vamos a proponer cuatro
métodos. Por simplicidad, asumiremos que los siguientes costes, todos ellos en millones
de dólares, vienen determinados para la red fluvial.
c12=1 , c13=24 ,C1=c12+c13=25 , C2=c25=3 ,
C3=c34=1 ,C 4=c45=2, C5=c5 L=1 ,C L=20.
El método LRS proporciona la siguiente solución (en millones de euros).
x1LRS=C1=25 ,
x2LRS=3 ,
x3LRS=1 ,
x4LRS=2 ,
x5LRS=1 ,
xLLRS=20.
El método UES proporciona la siguiente solución (en millones de euros).
x1UES= ∑
{1,2,3,4,5 , L }
c j
α ( j )=c12+c13+
C2
2+
C3
2+
C4
3+
C5
5+
CL
6
¿25+ 32+ 1
2+2
3+ 1
5+ 20
6
¿ 1565
=31,2.
x2UES= ∑
{2,5 ,L }
c j
α ( j )=
C2
2+
C5
5+
C L
6=3
2+ 1
5+20
6= 151
30=5,03.

x3UES= ∑
{3,4,5 , L}
c j
α ( j )=
C3
2+
C 4
3+
C5
5+
CL
6=1
2+ 3
2+ 1
5+ 20
6=47
10=4,7.
x4UES= ∑
{ 4,5 , L }
c j
α ( j )=
C4
3+
C5
5+
CL
6=2
3+ 1
5+ 20
6=21
5=4,2.
x5UES=∑
{5 , L }
c j
α ( j )=
C5
5+
CL
6=1
5+ 20
6=53
15=3,53 ,
xLUES=∑
{ L }
c j
α ( j )=
CL
6=20
6= 10
3=3,33.
Se puede comprobar fácilmente que
x1+ x2+x3+x4+x5+x L=52.
El método DES proporciona la siguiente solución (en millones de euros).
x1DES=∑
l∈ {1}
C j
σ ( j )=
c12
4+
c13
5=1
4+ 24
5=101
20=5,05.
x2DES= ∑
l∈ {1,2}
C j
σ ( j )=
c12
4+
C2
4=1
4+ 3
3=5
4=1,25.
x3DES= ∑
l∈ {1,3 }
C j
σ ( j )=
c13
5+
C 3
4=24
5+ 1
4=101
20=5,05.
x4DES= ∑
l∈ {1,3,4 }
C j
σ ( j )=
c13
5+
C3
4+
C4
3=24
5+ 1
4+ 2
3=343
60=5,72.
x5DES= ∑
l∈ {1,2,3,4,5 }
C j
σ ( j )
¿c12
4+
c13
5+
C2
3+
C3
4+
C4
3+
C5
2
¿ 14+ 24
5+ 3
3+ 1
4+ 2
3+ 1
2

¿ 11215
=7,47.
xLDES= ∑
l∈ {1,2,3,4,5, L }
C j
σ ( j )
¿c12
4+
c13
5+
C2
3+
C3
4+
C4
3+
C5
2+CL
¿ 14+ 24
5+ 3
3+ 1
4+ 2
3+ 1
2+20
¿ 41215
=27,47.
Es fácil de comprobar que
x1+ x2+x3+x4+x5+x L=52.
Pasamos a estudiar el método que usa el sistema de pesos. Vamos a resolverlo de
forma análoga a la comentada en la aplicación anterior. El vector de costes de limpieza
de cada tramo de la red fluvial esta dada por
Agente
C i
(Coste de limpieza del
segmento correspondiente, en
millones de €)
1 25
2 3
3 1
4 2
5 1
6 20
Total 52
Con lo que, C=(20,3,1,2,1,20 ) .
El sistema de pesos viene representado por la siguiente matriz,

( pij )=(
1,00 0,00 0,000,1 0,9 0,000,1 0,00 0,9
0,00 0,00 0,000,00 0,00 0,000,00 0,00 0,00
0,1 0,00 0,10,05 0,1 0,050,05 0,05 0,05
0,8 0,00 0,000,1 0,7 0,00
0,05 0,05 0,75).
Donde el significado de las variables es exactamente el mismo que el comentado
anteriormente. Una vez que disponemos del vector de costes asociados y del sistema de
pesos ya podemos calcular el vector solución de asignación de costes. Para ello,
simplemente tenemos que realizar la multiplicación matricial entre el vector de costes
dato y el sistema de pesos, es decir
X ( i )=C (i ) ∙( p ij )
De esta forma,
X1pi
j
=(C1 ∙ p11 )+ (C 2∙ p1
2)+(C3∙ p13 )+(C4 ∙ p1
4 )+ (C 5∙ p15 )+(C6 ∙ p1
6 )=¿26,65 millones de euros ,
X2pi
j
=(C1 ∙ p21 )+ (C 2 ∙ p2
2 )+(C3 ∙ p23 )+(C4 ∙ p2
4 )+ (C5 ∙ p25 )+(C6 ∙ p2
6 )=¿3,8 millones de euros ,
X3pi
j
=(C1 ∙ p31 )+(C2 ∙ p3
2 )+(C3 ∙ p33 )+(C4∙ p3
4 )+(C5 ∙ p35 )+(C6 ∙ p3
6 )=¿2,15 millones de euros ,
X 4pi
j
=(C1 ∙ p41 )+(C2 ∙ p4
2 )+(C3 ∙ p43 )+(C4 ∙ p4
4 )+(C5 ∙ p45 )+(C6 ∙ p4
6 )=¿2,7 millones deeuros ,
X5pi
j
=(C1 ∙ p51 )+(C2 ∙ p5
2 )+(C 3 ∙ p53 )+(C4∙ p5
4 )+(C 5∙ p55 )+(C6 ∙ p5
6 )=¿1,7 millones deeuros ,
X Lpi
j
=(C1 ∙ p61 )+(C2∙ p6
2 )+(C3 ∙ p63 )+(C4 ∙ p6
4 )+(C5 ∙ p65 )+ (C6 ∙ p6
6 )=¿15 millones deeuros .
Obteniendo la siguiente tabla solución,

Agente
Asignación de coste
C i
(millones de €)
1 26,65
2 3,8
3 2,15
4 2,7
5 1,7
6 15
Total 52
Por lo tanto, el vector solución de asignación es
X pij
= (26,65;3,8 ;2,15 ;2,7 ;1,7 ;15 ) .
Este vector nos ofrece una nueva solución cuya asignación depende de los
valores de las variables que forman nuestro sistema de pesos.
4.3.3 Comentarios
En esta aplicación, hemos analizado cuatro formas diferentes de realizar el
reparto de los costes de limpieza entre todos los agentes instalados en el curso de un río
y que intervienen en la contaminación del mismo.
Primero hemos estudiadoel método LRS (Local Responsability Sharing). Dicho
método se basaba en hacer responsables a cada agente de su propia contaminación. El
segundo método estudiado fue el UES (Upstream Equal Sharing). En esta alternativa,
para un segmento cualquiera, se le asociaba un coste al agente teniendo en cuenta un
reparto equitativo entre todos las industrias aguas arriba. El tercer método estudiado fue
el DES (Upstream Equal Sharing). Es un método muy similar al anterior. Ahora, para
un segmento cualquiera, se le asocia un coste al agente teniendo en cuenta un reparto
equitativo entre todos las industrias aguas abajo. En el último método usamos el

concepto de sistema de pesos y lo aplicamos para obtener un reparto en la asignación de
costes.
Vamos a representar una tabla resumen donde aparezcan todos los repartos
asociados a cada método de reparto. De esta forma hemos obtenido
Agentes
contaminantes
LRS
Coste
repartidos
(MNIS)
UES
Coste
repartidos
(MNIS)
DES
Coste
repartidos
(MNIS)
S. Pesos
Coste
repartidos
(MNIS)
1 25 31,2 5,05 26,65
2 3 5,03 1,25 3,8
3 1 4,7 5,05 2,15
4 2 4,2 5,72 2,7
5 1 3,53 7,47 1,7
6 20 3,33 27,47 15
Total 52 52 52 52
Comentamos ahora los resultados de cada proceso viendo que agentes pueden
estar interesados en cada uno de ellos y a quien le podría perjudicar en exceso.
Las conclusiones serían las mismas que para la aplicación del río Kishon. Todos
lo métodos tienen ventajas y desventajas, ya que los términos de precisión y
complejidad siguen distintas trayectorias y por lo tanto un método muy sencillo de
realizar será bastante impreciso mientras que un método con gran complejidad
(matemática o simplemente en la toma de datos) de ejecución tendrá mayor precisión.
La solución de compromiso es una opción intermedia que en nuestro caso podrían ser la
segunda o cuarta opción dependiendo siempre de la aplicación a tratar. Generalmente,
los agentes situados aguas arriba prefieren el método DES mientras que los agente
situados aguas abajo eligen el método UES. Algunos agentes, situados en un lugar
intermedio, pueden decantarse por el método LRS.
En la práctica, el método que debe ser usado depende más bien del contexto del
problema. Por ejemplo, en la asignación de los costes de contaminación, debemos usar
el método UES. Alternativamente, en problemas para solventar costes relacionados con
las inundaciones de agua, debemos usar el método DES. Esto se debe a que, en el caso
anterior, los agentes situados aguas arriba no pueden soportar una gran cantidad de agua

la cual supone un gran peligro para los agentes situados aguas abajo. Esto tiene que
realizarse de una manera equitativa. En otros casos, si a algunos agentes le son
asignados un coste mayor que a otros, estos agentes deben librarse tarde o temprano del
agua inundada. De hecho, la asignación de la inundación al último agente aguas abajo es
totalmente inaceptable.
Para finalizar con este capítulo vamos a hacer un comentario. Como se puede
apreciar, para la resolución de la segunda aplicación no hemos aplicado el concepto de
ratio de biodegradabilidad ya que, tras intentarlo de varias formas no conseguimos
ningún reparto capaz de asignar la cantidad total del coste incurrido. Esto es así, debido
a que ésta es una aplicación un poco específica donde se puede dividir la estructura en
un conjunto de agentes donde algunos de ellos son ficticios, ya que no vierten ningún
residuo a la red fluvial. En realidad los únicos emisores de vertidos son los agentes
situados en los nodos dos y cuatro por lo que la matriz de ratio de biodegradabilidad
sería nula menos 5 variables distintas de cero. Así pues, podemos concluir que dicho
método lo aplicamos siempre y cuando el conjunto de agentes situados a lo largo de la
red fluvial viertan una cierta cantidad de residuo como pasaba por ejemplo en la primera
aplicación.

Capítulo 5
Asignación del agua de un río
mediante reglas de reparto
secuencial
5.1 Introducción
En este capítulo, nos vamos a centrar en la redistribución de un recurso entre una
serie de agentes que reclaman una cierta cantidad del mismo para cubrir sus
necesidades. El conjunto de agentes va a estar localizado de forma lineal y ordenada. Un
conocido ejemplo de esta situación particular es el conocido problema de reparto del
agua de un río. Aprovechándonos de la ordenación lineal en la situación de los agentes,
vamos a transformar el problema original de reparto de un río en otro tipo de problema
formado por una secuencia de pequeños problemas de reparto entre dos agentes. Esta
actuación se traduce en la transformación matemática hacia un tipo de problema
equivalente denominado problema de bancarrota y pueden ser resueltos usando todas
las reglas asociadas a este tipo de problemas. Vamos a proponer una clase de
soluciones, que denominaremos reglas de reparto secuencial, resolviendo el problema

de reparto de un río. Nuestras suposiciones abarcan la literatura de bancarrota para
establecer con una estructura secuencial de agentes el reparto de un recurso cualquiera.
En este capítulo, primero vamos a caracterizar una clase de reglas de reparto
secuencial. Además, analizamos estas reglas de reparto secuencial basadas en cuatro
reglas clásicas de los problemas de bancarrota, estableciendo sus propiedades y
comparándolos con algunas de las soluciones típicas de los problemas de reparto de un
río.
Vamos a analizar la redistribución de un recurso entre una serie de agentes que
reclaman una cierta cantidad, estando ordenados de forma lineal. Un ejemplo típico es
el problema de reparto del agua de un río (Ambec y Sprumont (2002), Parrachino et al.
(2006), Carraro et al. (2007)). En los problemas de reparto de un río, los agentes vienen
representados por ciudades (o demandantes de agua), ordenados de forma lineal a lo
largo de un río. Sobre el territorio de cada agente el nivel de agua se ve incrementado
por la aportación de los afluentes y de la lluvia sobre el territorio. Esto da lugar a la
dotación del agente al flujo del río. Además, cada ciudad reclama una cantidad de agua
para cubrir sus necesidades. Estas cantidades pueden estar establecidas por cualquiera
de los principales principios en el reparto de agua. Los dos principios más usados son
los que ya hemos visto hasta el momento. Por un lado, tenemos el principio ATS
(Absolute Territorial Sovereignty) y por otro tenemos el ATI (Absolute Territorial
Integrity). Aunque estos principios extremos no se usan con frecuencia, la cantidad de
recurso que requiere cada agente es muchas veces superior a los que aporta.
En este ejemplo, la redistribución del recurso de agua puede ser deseada, por
ejemplo, cuando algunos agentes tienen grandes aportaciones pero demandan muy poca
cantidad de recurso. Tenemos en cuenta la ordenación lineal de los agentes para
determinar la redistribución, usando aproximaciones axiomáticas. Aplicando dos
requerimientos muy naturales, el orden de los agentes nos permite transformar el
problema de reparto de un río en una secuencia de problemas de reparto formada
únicamente por dos agentes. Los problemas reducidos de reparto de un río son
matemáticamente equivales a los problemas de bancarrota (Aumann anda Maschler
(1985), Young (1987) Moulin (2002)). Así pues, podemos usar reglas de reparto
basadas en la literatura de los problemas de bancarrota para resolver estos problemas
reducidos de reparto de un río. En cada uno de estos problemas de reparto reducidos, el
derecho de agua está asignado al agente y al conjunto de sus vecinos aguas abajo. Al
igual que en los problemas de bancarrota, vamos a proponer unas clases de soluciones, a

la que vamos a denominar reglas de reparto secuencial, basadas en las exigencias de los
agentes. Las reglas de reparto secuencial están construidas por la aplicación recursiva de
las reglas de bancarrota a una secuencia de problemas de reparto de un río reducidos.
En los problemas de bancarrota, el recurso puede dividirse perfectamente y va a
ser repartido sobre un conjunto de agentes con exigencias superpuestas. Una solución a
los problemas de bancarrota es una regla de reparto basada en las exigencias de recurso
de cada agente. Vamos a analizar varias aproximaciones axiomáticas para la
construcción de las reglas de reparto.
En un problema de reparto de un río, los agentes van a estar ordenados
linealmente, caracterizados por una dotación inicial de recurso y una demanda para
cubrir sus necesidades. Las demandas pueden ser mayores o menores a las dotaciones.
Al igual que en los problemas de bancarrota, vamos a asumir escasez de recurso. Los
problemas de reparto de un río se diferencian de los problemas de bancarrota en dos
aspectos fundamentales. El primero de ellos es que existe una diferencia en la posición
de los agentes. En el problema estándar de bancarrota, todos los agentes tienen la misma
posición. En los problemas de reparto de un río, los agentes están ordenados
linealmente, reflejando la dirección de la corriente fluvial. Por lo tanto, las demandas de
los agentes tienen una estructura secuencial, uniendo los problemas de reparto de un río
a los problemas de bancarrota con prioridad de orden. El segundo aspecto es que existe
una diferencia en el estado inicial del recurso. En los problemas de bancarrota,
inicialmente el recurso está totalmente separado de los agentes. En los problemas de
reparto de un río, los agentes inicialmente tienen una dotación de recurso. Esta dotación
de recurso enlaza nuestras aproximaciones a la reasignación de problemas. Ambas
diferencias son muy importantes a la hora de construir la clase de reglas de reparto
secuencial.
Hay dos motivos o razones para resolver los problemas de reparto de un río
usando las reglas de bancarrota. El primero de ellos es el que hemos indicado
anteriormente. Ambos tipos de problemas tienen muchas cosas en común. Debido a que
las propiedades de los problemas de bancarrota están muy bien definidas, estas reglas
son buenas candidatas para ser aplicadas a los problemas de reparto de un río. La
segunda razón está basada en las actuales prácticas en la asignación de agua. Muchas
disputas entre dos agentes sobre los derechos de agua se resuelven usando varias reglas
de bancarrota, por ejemplo las reglas de mismo reparto para cada agente o de reparto
proporcional en base a cualquier criterio. Frecuentemente, estas soluciones están

explícitamente propuestas por terceras partes pero estas son también un resultado de las
negociaciones entre agentes. En este capítulo, vamos a mostrar una extensión lógica de
las reglas de reparto para los problemas de reparto de un río con más de dos agentes.
Así pues, primero vamos a extender las aproximaciones de la literatura de
bancarrota para establecer una estructura secuencial de los agentes y del recurso a
repartir. Después vamos a proporcionar fundamentos axiomáticos para una clase de
solución de los problemas de reparto de un río que satisfacen ciertas propiedades.
5.2 El problema de reparto de agua en un río
Consideremos un conjunto N ordenado de agentes, con n>2, localizados a lo
largo del río, con el agente 1 el situado aguas más arriba y el agente n el situado aguas
más abajo. Un agente cualquiera i está situado aguas arriba de j si se cumple que i< j.
Denotaremos U i= { j∈ N : j<i } al conjunto de agentes aguas arriba de i, y llamaremos
Di= { j∈N : j>i } al conjunto de agentes aguas abajo de i. Sobre el territorio de i, las
lluvias o las entradas procedentes de los afluentes incrementan el flujo del río total por
e i≥ 0 ;e=( e1 , …, en ) . Las entradas del río e i pueden ser consideradas como la dotación
de i. Esto no implica que el agente i tenga derecho de propiedad de e i . Los derechos
están asignados en un solución del problema de reparto del río, como se ha discutido
anteriormente. Además de la entrada al río e i, cada agente está caracterizado por una
demanda de agua c i ≥0 ;c=(c1 , …,cn ) de la corriente del río. Nosotros no imponemos
que porción de la demanda de un agente viene directamente de e1 ,e2 , …,en.
Toda está información es suficiente para definir nuestro problema de reparto de
agua de río.
Definición 5.1 (El problema de reparto de un río). Un problema de reparto de un río
está compuesto por la triada w= ⟨ N ,e , c ⟩ , con N un conjunto ordenado de un
número finito de agentes, e∈ R+¿n yc∈ R+¿n¿ ¿.
Para establecer la configuración de los problemas de reparto de un río vamos a usar
la siguiente representación gráfica.

Figura 5.1 El problema de reparto de un río para 4 agentes
Notar que en la Figura 5.1, los nodos representan a los agentes y las flechas
indican los flujos de agua. El agua sobre el territorio del agente i viene definida por
Ei=ei+ ∑j∈U i
( e j−x j ) .
Donde x=( x1 , …, xn ) es el vector de asignación de los derechos del agua. Esta es la
suma de todas las entradas del río sobre el territorio del agente i y el agua del río aguas
arriba no asignada. Para el problema de reparto del río vamos a realizar las siguientes
suposiciones.
Suposición 5.1 El agente n siempre va a demandar más agua que la que él tiene
disponible, es decir, cn>En.
Esta suposición implica que cn>en, y por tanto, se asegura que se va a disputar el
agua del río. Sin esta suposición, el agente n podría satisfacer su demanda
completamente y, por tanto, no existiría ningún problema.
Denotaremos Ω al conjunto de problemas de reparto del río que satisfacen la
suposición 5.1. Las reglas de reparto asignarán los derechos del agua a cada agente.

Definición 5.2 (Regla de reparto). Una regla de reparto es una aplicación F:Ω → R+¿n¿
que asigna a cada problema de reparto de un río w∈Ω un vector de asignación de
los derechos de agua x=( x1 , …,xn ) , x∈R+¿n ,¿ tal que
a) ∑i∈N
x i=∑i∈N
e i ,
b) 0≤ xi ≤ ci ,
c) x i≤ e i+ ∑j∈U i
e j ,∀ i∈N .
La asignación de los derechos de agua del agente i es F i (w )=x i. El primer
requerimiento de la regla de reparto es eficiencia, es decir, los derechos del agua no
quedan sin asignar. El segundo requerimiento implica que la asignación destinada a
cada agente esté siempre acotada por un valor máximo y cero. Para finalizar, la última
restricción representa la limitación de viabilidad.
5.3 Caracterización de las reglas de reparto secuencial
Las soluciones procedentes de la literatura de bancarrota no pueden ser
directamente aplicadas a los problemas de reparto de un río. El orden lineal de los
agentes situados a lo largo del río y la uni-direccionalidad del flujo del agua nos
permite, sin embargo, representar el problema del reparto del río como una secuencia de
problemas de reparto reducidos formados cada uno de ellos únicamente por dos agentes.
Estos problemas de reparto reducidos son matemáticamente equivalentes a los
problemas de bancarrota. Esto lleva a la definición de los problemas de reparto y a la
caracterización de una clase de reglas de reparto secuencial usando estas definiciones.
Únicamente n sobrepasa la demanda de materia. Para cada problema de reparto de
un río w= ⟨ N ,e , c ⟩ , y cada problema relacionado w '= ⟨ N , e ' , c ' ⟩ tal que
e '=(e1 ,…,en−1 , en' ) y c '=(c1, …, cn−1 , cn
' ) , con en' =0 y cn
' =cn−en, tenemos que
F i (w )=F i ( w ' ) ,∀ i∈N .
Esta propiedad nos indica que la asignación de agua, aguas arriba no debe estar
afectada por la parte de la demanda del agente n que puede estar satisfecho con la

dotación del agente n. En otras palabras, únicamente el agente n sobrepasa la demanda
cn−en. Este hecho, es un leve requerimiento ya que n no está confrontada con ninguna
demanda procedente de los agentes aguas abajo. Además, no hay ninguna alternativa de
uso para en de su asignación a n; la dotación en esta destinada al agente n. De esta
forma, parece natural que en se use para satisfacer parcialmente a cn.
Sin ventajas en las mezclas aguas abajo. Para cada problema de reparto de un río
w= ⟨ N ,e , c ⟩ , y cada problema relacionado w '= ⟨ N , e ' , c ' ⟩ tal que N '=N ¿ {n¿} y
e '=(e1 ,…,en−2 , en−1' ) con c '=(c1 ,…,cn−2 , cn−1
' ) y en−1' =en−1+en y cn−1
' =cn−1+cn,
tenemos que F i (w )=F i ( w ' ) ,∀ i<n−1.
Esta propiedad permite la posibilidad que los agentes n y n-1 consoliden sus
demandas y dotaciones y se presenten conjuntamente como un demandante único. El
axioma indica que la asignación de los agentes situados aguas arriba no está afectada
por este comportamiento.
Estas dos definiciones que acabamos de ver, de forma conjunta proporcionan
que el flujo del río aguas abajo se usa primero para satisfacer las demandas de los
agentes situados aguas abajo. Únicamente las demandas en exceso del flujo del río
aguas abajo pueden afectar a la asignación de agua de los agentes situados aguas arriba.
Así pues, las soluciones que podemos usar para el exceso de demanda aguas abajo, que
denotaremos como c Di, vienen dadas por la siguiente expresión.
c Di=∑j∈Di
(c j−e j ).
Consecuentemente, la dotación correspondiente aguas abajo es eDi=0.
Únicamente n sobrepasa la demanda de materia y Sin ventajas en las mezclas aguas
abajo son el primer paso para aproximar el problema de reparto del río usando las reglas
de bancarrota, asumiendo que los agentes situados aguas abajo no pueden demandar
algo que ya poseen.
Usando la expresión anterior, los dos axiomas llevan directamente a la
representación del problema de reparto del río w como una secuencia ( w1 ,…, wn ) de
problemas de reparto del río reducidos w i.

Definición 5.3 (Problema de reparto de un río reducido). Un problema de reparto de
un río reducido esta compuesto por la triada w i=⟨ N i , E i , Ci ⟩, con dos agentes
N i= {i , Di }, quienes tienen unas demandas C i={c i , cDi }, en un recurso Ei.
Notar que, en un abuso de notación, vamos a llamar al segundo agente del
problema de reparto de un río reducido como Di. Este conjunto de agentes son tratados
como un demandante único. En cada problema de reparto reducido w i, el flujo del río
disponible Ei es distribuido o repartido entre i y Di. Pasamos ahora a ver el siguiente
teorema sobre la disputa del agua.
Teorema 5.1 En cada problema de reparto reducido las sumas de las demandas excede
siempre a la cantidad de agua disponible: Ei<c i+c Di∀ i∈N
El Teorema 5.1 asegura que un problema de reparto de un río reducido es un
problema de reparto, de acuerdo con la Definición 5.1, compuesto por dos agentes y sin
ninguna dotación de agua, aguas abajo. Así pues, una regla de reparto asigna a cada
problema de reparto reducido w i , un vector de asignación de los derechos del agua
x=( x i , x Di )=Ei.
Un problema de reparto reducido es matemáticamente equivalente al problema de
bancarrota. De esta forma, las reglas de bancarrota pueden ser aplicadas a cualquier
problema de reparto reducido. Para poder resolver un problema de reparto de un río, las
reglas de bancarrota son aplicadas a la secuencia ( w1 ,…, wn ) de problemas reducidos.
Debido a la expresión Ei, el problema reducido y sus soluciones dependen unas de otras.
Ya que E1=e1 , por definición, w1 es el único problema reducido cuyas salidas no
dependen de las salidas de otros problemas reducidos. Su solución (la asignación x1 al
agente 1) determina E2 con la formulación correspondiente y proporcionando la
solución w2, etc. Así, la secuencia de problemas reducidos puede ser resulto
recursivamente en el orden lineal de los agentes situados a lo largo del curso del río.
Todo esto queda reflejado en la siguiente proposición.

Proposición 5.1 Para cada problema de reparto de un riow= ⟨ N ,e , c ⟩ y
sucorrespondiente secuencia de problemas de reparto reducidos ( w1 ,…, wn ), tenemos
que F i (w )=F i ( wi )∀ i∈N .
Los derechos de agua asignados a cada agente, son igual para la solución del
problema de reparto de un río y para la resolución recursiva de la secuencia de los
distintos problemas de reparto reducidos. Dado el vector de demandas y dotaciones, la
asignación del agente i es independiente del número de agentes en Di, la distribución de
sus demandas (c i+1, …, cn ) y la distribución de sus dotaciones (e i+1 , …,en); únicamente
depende de las demandas agregadas ∑j∈Di
c j y las dotaciones de materia ∑j∈Di
e j.
Antes de aplicar estas reglas en un ejemplo, vamos a ver cuatro reglas de reparto
secuencial, basadas en cuatro reglas básicas de la literatura de bancarrota. Estas cuatro
reglas clásicas son la regla proporcional, la limitación por premios iguales, la limitación
por pérdidas iguales y la regla del Talmud.
Regla proporcional (PRO). Para cada problema de reparto de un río reducido
w i=⟨ N i , E i , Ci ⟩∈Ω, existe un valor λ>0, tal que x iPRO= λc i y xDi
PRO= λ cDi.
PRO asigna a cada agente un reparto del recurso proporcional a la demanda del
agente.
Limitación de premios iguales (CEA). Para cada problema de reparto de un río
reducido w i=⟨ N i ,E i , Ci ⟩∈Ω, existe un valor λ>0, tal que x iCEA=min (c i , λ ) y
xDiCEA=min (cDi , λ ).
CEA asigna a cada agente un reparto equitativo de un recurso, sujeto a que
ningún agente reciba más de lo que demanda.
Limitación de pérdidas iguales (CEL). Para cada problema de reparto de un río
reducido w i=⟨ N i , E i , Ci ⟩∈Ω, existe un valor λ>0, tal que x iCEL=max (0 , ci−λ ) y
xDiCEL=max (0 , cDi−λ ).

CEL asigna a cada agente un reparto de un recurso tal que sus pérdidas
comparadas a sus demandas sean iguales, sujeto a que ningún agente reciba un reparto
negativo.
Regla del Talmud (TAL). Para cada problema de reparto de un río reducido
w i=⟨ N i , E i ,Ci ⟩∈Ω, existe un valor λ>0, tal que
x iTAL={min {1
2 c i , λ}, si E i≤12 ( c i+cDi ) ,
ci−min {12
c i , λ},en otro caso .
xDiTAL={min {1
2 c Di , λ}, si Ei ≤12 (c i+c Di) ,
ci−min {12
c Di , λ}, enotro caso .
La regla TAL asigna a cada agente su reparto no impugnado del recurso
dividiéndolo en dos partes iguales.
5.4 Propiedades
Estudiamos ahora algunas propiedades que se van a dar en los problemas de
reparto reducidos. Estas propiedades van a ser las demandas monótonas, el recurso
monótono, la invariancia de escala y la consistencia.
Demandas monótonas. Para cada problema de reparto de un río w= ⟨ N ,e , c ⟩, cada
i∈N , y cada problema relacionado w '=⟨ N , e , (ci' , c i )⟩ tal que c i
'>c i , tenemos
F i (w ' )≥ F i ( w ).
Esta propiedad indica que para un agente i, su reparto no debe empeorar si su
demanda se ve incrementada por cualquier motivo.

Recurso monótono. Para cada problema de reparto de un río w= ⟨ N ,e , c ⟩, cada
i∈N , y cada problema relacionado w '=⟨ N , (e i' , ei ) , c ⟩ tal que e i
'>e i , tenemos
F ( w ' ) ≥ F (w ).
Esta propiedad nos dice que la asignación de un agente no debe empeorar
cuando un agente cuenta con una dotación mayor por cualquier motivo.
Invariancia de escala. Para cada problema de reparto de un río w= ⟨ N ,e , c ⟩, cada
i∈N , todo λ>0 y cada problema relacionado w '=⟨ N , λ e , λc ⟩ , tenemos F ( w ' )= λF (w )
.
Esta propiedad nos dice que escalando las dotaciones y las demandas de todos
los agentes, esta acción no afectará a la solución de ninguno de los agentes.
Consistencia. Para cada problema de reparto de un río w= ⟨ N ,e , c ⟩, cada
i , j∈N ,i ≠ j , y cada problema relacionado w '=⟨ N ' , e ' , c ' ⟩ tal que
N '=N ¿ { j¿}, c '=c ¿ {c j¿}, y e'=(e1' ,…,e j−1
' , e j+1' , …,en
' ) , con e ' factible y eficiente tal
que ∑i≤ k
(e i'−e i )≤0 , ∀ k< j y ∑
k∈N '(ek
' −ek )=e j−x j, tenemos F i (w )=F i ( w ' ).
Vemos ahora la siguiente proposición.
Proposición 5.2 Las siguientes relaciones entre las propiedades de los problemas de
bancarrota y sus correspondientes reglas de reparto secuencial se satisfacen
a) Si una regla de bancarrota satisface las demandas monótonas, su
correspondiente regla de reparto secuencial satisface las demandas monótonas.
b) Si una regla de bancarrota satisface el recurso monótono, su correspondiente
regla de reparto secuencial satisface el recurso monótono.
c) Si una regla de bancarrota satisface invariancia de escala, su correspondiente
regla de reparto secuencial satisface invariancia de escala.

d) Si una regla de bancarrota satisface las demandas monótonas y recurso
monótono, entonces existe un vector e ' tal que su correspondiente regla de
reparto secuencial satisface consistencia.
Debido a que PRO, CEA, CEL y TAL satisfacen Demandas monótonas, Recurso
monótono e Invariancia de escala, esta proposición lleva inmediatamente al siguiente
corolario.
Corolario 5.1 Las reglas de reparto secuencial basadas en PRO, CEA, CEL y TAL
satisfacen Demandas monótonas, Recurso monótono, Invariancia de escala y
Consistencia.
5.5 Aplicación
5.5.1 Presentación del problema
Vamos a pasar a ver una aplicación donde podamos ilustrar todos los conceptos
teóricos que hemos visto hasta ahora a lo largo del capítulo. En esta sección,
presentamos un problema ejemplo sobre el reparto del agua de un río que atraviesa
cierto número de ciudades que demandan cantidades diferentes de agua. Así, vamos a
presentar el siguiente ejemplo. Sea un río que desea satisfacer la demanda de cuatro
ciudades instaladas en su curso, siendo la ciudad 1 la situada aguas más arriba y la
ciudad 4 la situada aguas más abajo. Cada una de las ciudades reclama una cierta
demanda de agua para cubrir sus necesidades y que viene representada por el siguiente
vector de demanda c= (50,10,20,90 ). La suma de todas las demandas representa un total
de 170 unidades de agua. Además, a cada municipio o nodo de nuestro problema le
debemos añadir su dotación que nos es más que la suma de las cantidades de agua de los
distintos afluentes que pueda tener el río más la cantidad de agua procedente de las
lluvias en los distintos periodos del año. La dotación de cada agente va estar
representada por el siguiente vector e=(80,10,10,10 ). La suma de las cantidades de agua
disponibles para el reparto es de 110 unidades de
agua.
En la siguiente imagen
representamos de manera esquemática la
situación que vamos a utilizar para resolver nuestro
problema de reparto de agua de un río entre una

serie de agentes. El problema se centra básicamente en repartir las 110 unidades de agua
de la manera más justa posible ante una demanda 60 unidades superior a la oferta, es
decir, que no hay agua para que todos los agentes puedan cubrir el 100% de sus
necesidades.
Primero nos centramos en resolver el problema de forma analítica usando los
cuatro métodos que hemos visto en este capítulo. Estos métodos son el PRO, el CEA, el
CEL y el TAL. Vamos a ver como realizan el reparto cada uno de ellos. Después de ver
los cuatro métodos por separado vamos a realizar dos análisis de sensibilidad. Primero
veremos como afecta la asignación de cada uno de los cuatro métodos cuando se realiza
un incremento de la cantidad de demanda de recurso por un agente, es decir, como varía
la asignación al incrementar la demanda de un agente cualquiera. El segundo análisis de
sensibilidad va a consistir en ver cómo varía la asignación de cada uno de los cuatro
métodos al incrementar la oferta de un agente una cierta cantidad. Una vez realizados
los análisis de sensibilidad pasaremos a comparar los métodos de reparto que hemos
visto a lo largo del capítulo. Para finalizar, realizaremos una serie de discusiones y
conclusiones sobre todos los resultados obtenidos en los distintos estudios.
5.5.2 Métodos de reparto secuencial: resolución analítica
Pasamos ahora a ver como se van a resolver cada uno de los cuatro métodos de
reparto secuencial que se han propuesto a lo largo del capítulo. Estos métodos son el
PRO, el CEA, el CEL y el TAL. Vamos a centrarnos en cada uno de ellos de manera
individual, viendo cuales son los criterios que usan para establecer un buen reparto.
5.5.2.1 Método de reparto proporcional (PRO)

El método PRO asigna a cada agente un reparto del recurso proporcional a la
demanda del agente. Así, los agentes que más demandan tendrán una asignación mayor
pero, a todos ellos se le va a asignar la misma cantidad proporcional. Es un método muy
sencillo matemáticamente aunque, como ya se ha comentado, establece un reparto
únicamente usando como criterio la creación de la variable lambda.
Para cada problema de reparto de un río reducido, w i=⟨ N i , E i , Ci ⟩∈Ω, el método
PRO establece que existe un valor λ>0, tal que x iPRO= λ c i y xDi
PRO= λ cDi. Donde el valor
de lambda viene dado por la siguiente expresión λ=Ei
c i+cDi .
Para desarrollar tanto este método como los demás, nos centramos en la
siguiente tabla explicando paso a paso la obtención de cada término.
i ei ci Ei cDi xiPRO xDi
PRO PiPRO
1 80 50 A B D E F
2 10 10 G H J K L
3 10 20 M N O P Q
4 10 90 R S U V W
Vamos a explicar el significado de cada una de las columnas de la tabla anterior
antes dela obtención de todos los valores necesarios. La primera columna representa la
ciudad, es decir, la fila 1 se refiere a la ciudad situada aguas más arriba mientras que la
ciudad 4 es la situada agua más abajo. La segunda columna muestra la dotación que
cada ciudad puede aportar. En la tercera columna aparecen las demandas de cada una
de las ciudades. Las tres primeras columnas son los datos de nuestro problema, a partir
de ellos, debemos ser capaces de obtener el resto de los valores de la tabla. La cuarta
columna representa la cantidad de agua disponible en cada nodo. Esta variable ya se ha
explicado anteriormente y su obtención se realiza a través de la expresión Ei. Notar que,
al igual que comentamos antes, para el agente 1, E1=e1=80 por ser el situado aguas
más arriba. La quinta columna representa el exceso de demanda aguas abajo de cada
nodo. Para la obtención de esta variable hacemos uso de la expresión de c j que ya
hemos visto antes en el desarrollo teórico del capítulo. La variable lambda, como
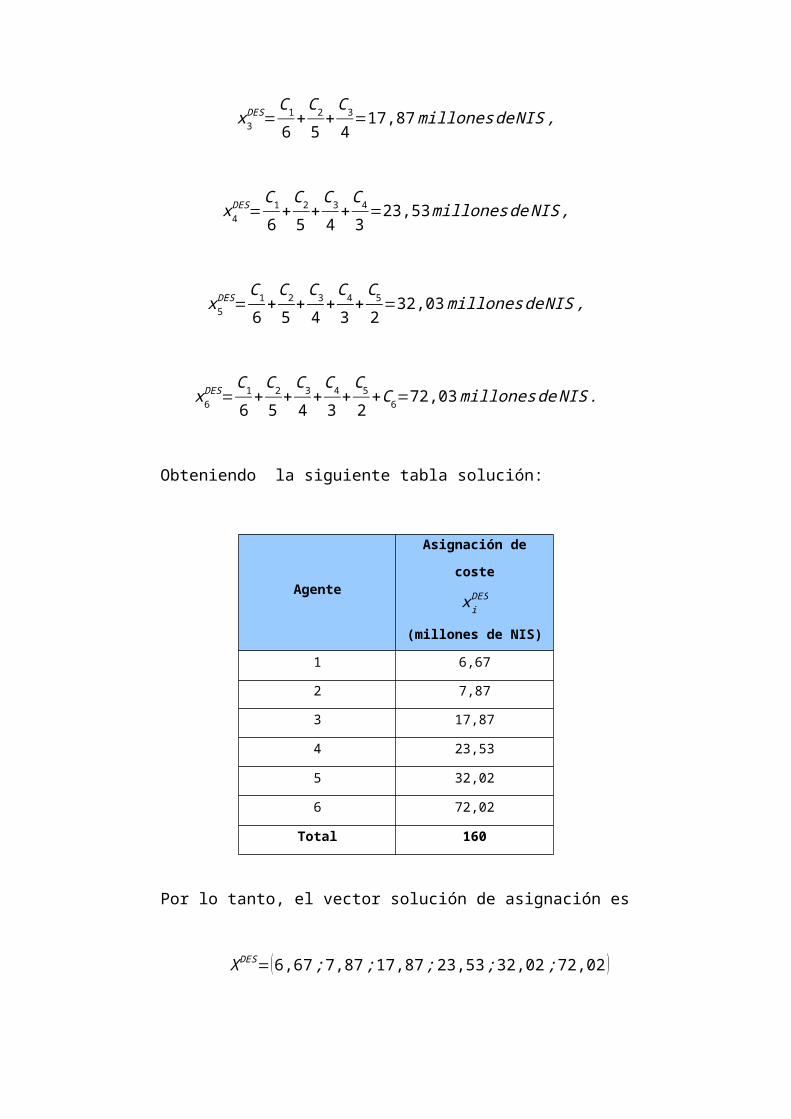
comentamos antes, viene dada por la expresión λ=Ei
c i+cDi . La sexta y séptima
columnas representan la cantidad de agua asignada a cada ciudad y la asignación de
agua aguas abajo, respectivamente. Esta variables, para el caso de la resolución del
método PRO vienen dadas por las siguiente expresiones x iPRO= λc i y xDi
PRO= λ cDi. Por
último, en la octava columna se representa (en tanto por uno) la porción de demanda
que queda cubierta con la asignación a cada una de las ciudades, es decir, Pi=x i
ci .
Una vez explicadas todas las variables de la tabla, procedemos a calcular cada
una de las variables mediante el método PRO.
E1=80 λ1=80
50+90=0,57 x1=28,5 xD 1=51,3 P1=0,57
E2=61,5 λ2=61,5
10+90=0,62 x2=6,2 xD 2=55,8 P2=0,62
E3=65,3 λ3=65,3100
=0,65 x3=13 xD 3=52 P3=0,65
E4=62,3 λ4=62,390
=0,69 x4=62,1 xD 4=−−¿ P4=0,69
Trasladando todos los valores a la tabla tenemos,
i ei ci Ei cDi λ xiPRO xDi
PRO PiPRO
1 80 50 80 90 0,57 28,5 51,3 0,57
2 10 10 61,5 90 0,62 6,2 55,8 0,62
3 10 20 65,3 80 0,65 13 52 0,65
4 10 90 62,3 - 0,65 62,1 - 0,65
Notar que la suma de las asignaciones proporcionadas por el método PRO
coincide con la cantidad de oferta del nivel de agua, es decir, unas 110 unidades de
agua.

5.5.2.2 Método de reparto de beneficios equitativos (CEA)
El método CEA es un método basado en la igualdad pero respetando siempre los
limites superiores máximos que podemos alcanzar con cada agente. Lo que se hace con
este método es repartir de forma equitativa toda la oferta, entre todo el conjunto de
agentes del problema de reparto reducido, sin sobrepasar en ningún caso la cantidad
demandada por cada agente. Si realizando esta actuación sobra recurso, porque puede
ocurrir que haya agentes que demanden menos cantidad que la partición equitativa de la
demanda, el sobrante se vuelve a repartir entre todos los agentes que aún no hayan
llegado al nivel máximo de su demanda.
Para este método vamos a utilizar la siguiente tabla,
i ei ci Ei cDi xiCEA xDi
CEA PiCEA
1 80 50 A B C D E
2 10 10 F G H I J
3 10 20 K L M N O
4 10 90 P Q R S T
El vector de demandas es c= (50 ;10 ;20 ;90 ) y la suma de la cantidad de oferta
que disponemos es de 110 unidades de agua. Dividimos la cantidad de oferta entre los
cuatro agentes, siendo la asignación teórica de 27,5 unidades de agua. Realizamos la
primera asignación, teniendo en cuenta la máxima demanda posible de cada agente,
obteniendo x=(27,5 ;10 ;20 ;27,5 ). Aún faltan por asignar un total de 25 unidades de
agua que repartido entre los dos agentes que aún no han llegado a su limite superior
caben a 12,5 u.a. por agente. De esta forma la asignación final es la siguiente
x=[ 40 ;10 ;20 ;40 ]. Los demás valores de la tabla son
Agente 1 2 3 4
E 80 50 50 60
c D 90 90 80 --
xD 40 40 50 --
P 0,8 1,00 1,00 0,44
La tabla con todos los resultados reflejados quedaría de la siguiente forma,

i ei ci Ei cDi xiCEA xDi
CEA PiCEA
1 80 50 80 90 40 40 0,8
2 10 10 50 90 10 40 1,00
3 10 20 50 80 20 50 1,00
4 10 90 60 -- 40 -- 0,44
Notar que la suma de las asignaciones proporcionadas por el método CEA
coincide con la cantidad de oferta del nivel de agua, es decir, 110 unidades de agua.
5.5.2.3 Método de reparto de pérdidas equitativas (CEL)
El método CEL tiene el mismo espíritu que el método CEA con la diferencia de
que este se centra en las pérdidas que incurren los demandantes. De esta forma, el
método CEL consiste en asignar la misma cantidad de pérdidas a todos los demandantes
sujetos a que ninguno de ellos reciba una cantidad negativa. Este método consiste
básicamente en tomar el sumatorio de la demanda total, ver la cantidad de recurso que
falta por cubrir con la cantidad de oferta disponible. Esa cantidad necesitada se divide
entre los cuatro agentes y se le resta a su demanda máxima. Si alguna es inferior a cero,
se le asignará cero y producirá un nuevo sobrante que se asignará en la siguiente
iteración. El método finalizará cuando no sobre demanda por restar. De esta forma
vamos a tener la siguiente tabla,
i ei ci Ei cDi xiCEL xDi
CEL PiCEL
1 80 50 A B C D E
2 10 10 F G H I J
3 10 20 K L M N O
4 10 90 P Q R S T
Como se puede comprobar tiene exactamente la mima estructura que la tabla que
usamos con el método CEA.
Para resolver el problema, lo primero es calcular la suma de demandas de
nuestro problema c= (50 ;10 ;20 ;90 ). Esta cantidad es de 170 unidades de agua. Por
otra parte, la oferta de nuestro problema es de 110 unidades de agua. Por lo tanto,

tenemos un exceso de demanda de 60 unidades de agua. Dicho exceso, se va a repartir
entre los cuatro agentes, resultando un exceso por agente de 15 unidades de agua. La
primera asignación se realiza restando a cada agente 15 unidades de la demanda
máxima permitida. Si esta cantidad es inferior a cero se le asignará el limite inferior, es
decir, cero unidades de agua. La primera asignación proporciona el vector
x=(35 ;0 ;5 ;75 ) en el que tenemos un exceso de demanda de tan solo 5 unidades de
agua. Esta cantidad se va a repartir entre los tres agentes que aún no han alcanzado su
límite inferior. De esta forma, para la segunda iteración se restan 5 unidades de agua
entre los tres agentes proporcionando un reparto final de x=(33,33 ;0 ;3,33 ;73,33 ).
Dicho reparto, ya no tiene ninguna unidad de exceso de demanda. Las demás variables
se han calculado de forma análoga al caso anterior, obteniendo los siguientes resultados.
Agente 1 2 3 4
E 80 56,67 66,67 73,34
c D 90 90 80 --
xD 46,67 56,67 63,34 --
P 0,66 0 0,16 0,81
La tabla con todos los resultados reflejados quedaría de la siguiente forma,
i ei ci Ei cDi xiCEA xDi
CEA PiCEA
1 80 50 80 90 33,33 46,67 0,66
2 10 10 56,67 90 0 56,67 0,00
3 10 20 66,67 80 3,33 63,34 0,16
4 10 90 73,34 -- 73,33 -- 0,81
Notar que el sumatorio de las asignaciones proporcionadas por el método CEL
coincide con la cantidad de oferta del nivel de agua, es decir, unas 110 unidades de
agua.
5.5.2.4 Método de reparto de la regla del Talmud (TAL)
Pasamos ahora a ver el último de los cuatro métodos que vamos a usar para resolver
nuestro problema de reparto de un río. El método TAL define dos regímenes basados en

las semisumas de las demandas. Si dicha cantidad es inferior a la cantidad a repartir, se
aplica el método CEA. En caso contrario, cada agente recibe la mitad de su demanda y
se aplica el método CEL a la cantidad sobrante. Notar que estamos usando la mitad de
las demandas y no la demanda entera. De esta forma vamos a tener la siguiente tabla,
i ei ci Ei cDi xiCEL xDi
CEL PiCEL
1 80 50 A B C D E
2 10 10 F G H I J
3 10 20 K L M N O
4 10 90 P Q R S T
Como podemos comprobar, tiene exactamente la mima estructura que las tablas
que hemos usado en los métodos CEA y CEL. Para resolver nuestro problema, lo
primero que debemos hacer es comprobar que nuestra oferta es mayor a la semisuma de
las demandas. Así, para nuestro caso tenemos una oferta de 110 unidades de agua
mientras que la semisuma de las demandas es de 85 unidades de agua. Por lo tanto se
cumple que la oferta sea mayor que la semisuma de las demandas. Aplicamos entonces
el método CEA a un vector formado por la mitad de la demanda c= (25;5 ;10 ;45 ).
Como ya hemos visto, tenemos una oferta de 110 unidades de agua que repartida entre
los cuatro agentes corresponde a 27,5 unidades de agua por agente. Realizando la
asignación mediante el método CEA obtenemos x1=(25 ;5 ;10;27.5 ). Dado que el
sumatorio de la semi-demanda es de 85 y la primera asignación otorga 67,5 unidades de
agua, tenemos un sobrante de 85-67,5=17,5 unidades de agua que, cediéndolas al único
agente que aún no ha llegado a su limitación máxima de demanda, obtenemos una
asignación final de x1=(25 ;5 ;10; 45 ).
En este primer paso, hemos asignado ya 85 unidades de agua de las 110
correspondientes. Ahora debemos aplicar el método CEL pero, ¿qué cantidad de
pérdidas debemos considerar? La semisuma de las demandas suman 85 unidades de
agua, luego nos falta aún por asignar 110-85=25 unidades más. Así pues, la cantidad de
pérdidas que debemos considerar para que la segunda semisuma de las demandas sea 25
unidades de agua es de 85-25=60 unidades de agua en pérdidas. Aplicamos entonces el
método CEL con 60 unidades de agua en pérdidas. Para ello, repartimos estas pérdidas
entre todos los agentes, es decir, cada agente acarrea unas pérdidas de 15 unidades de

agua cada uno. Realizando la primera asignación obtenemos x2=(10 ;0 ;0 ;30 ). El
sumatorio de esta asignación es de 40 unidades de agua, por lo que tenemos un sobrante
de 40-25=15 unidades de agua. Repartiendo estas 15 unidades de agua entre los dos
agentes que aún no han llegado a su límite inferior, obtenemos finalmente la siguiente
asignación x2=(2.5 ;0 ;0 ;22,5 ).
Para concluir, sólo queda sumar las dos asignaciones obtenidas por este método
x=x1+x2=(25 ,5 , 10 ,45 )+ (2.5,0,0,22 .5 )=(27.5 , 5 ,10 ,67.5 ). Las demás variables se han
calculado de forma análoga a los casos vistos anteriormente.
Agente 1 2 3 4
E 80 62,5 67,5 67,5
c D 90 90 80 --
xD 52,5 57,5 57,5 --
P 0,34 0,50 0,50 0,75
La tabla con todos los resultados reflejados quedaría de la siguiente forma,
i ei ci Ei cDi xiTAL xDi
TAL PiTAL
1 80 50 80 90 27,5 52,5 0,34
2 10 10 62,5 90 5 57,5 0,50
3 10 20 67,5 80 10 57,5 0,50
4 10 90 67,5 -- 67,5 -- 0,75
Notar que la suma de las asignaciones proporcionadas por el método TAL,
coincide con la cantidad de oferta del nivel de agua, es decir, 110 unidades de agua.
5.5.3 Análisis de sensibilidad
Una vez visto la resolución del problema de reparto de agua de un río entre un
conjunto de agentes situados a lo largo de su curso, pasamos ahora a ver dos análisis de

sensibilidad aplicados a cada uno de los métodos introducidos hasta ahora. El primero
de los análisis va a consistir en incrementar la demanda de uno de los agentes que
participan en el reparto. De esta forma, en el primer caso incrementaremos la demanda
del agente dos en veinte unidades de agua, es decir, c2 va a pasar de valer 10 unidades a
30 unidades de agua. Estableceremos el reparto de acuerdo a los cuatro métodos ante
esta variación en la demanda y comprobaremos que se cumple la propiedad de
Demandas monótonas introducida en la parte teórica del capítulo. El segundo análisis
de sensibilidad que realizamos va a consistir en la variación en la dotación de un agente
cualquiera que participa en el reparto. De esta forma, resolveremos el problema de
reparto utilizando los cuatro métodos al incrementar la dotación proporcionada por el
agente dos. Así, e2 va a pasar de valer 10 unidades a 30 unidades de agua. Además,
podremos comprobar que se cumple la propiedad de recurso monótono que
introducimos anteriormente.
Notar que, para la representación de los resultados, se van a presentar
únicamente las tablas ya que la resolución de cada método es totalmente análoga a la
que hemos explicado en la sección anterior.
5.5.3.1 Análisis de sensibilidad: Demanda incrementada
Método PRO
i ei ci Ei λ cDi xiPRO xDi
PRO PiPRO
1 80 50 80 0,5 110 25 55 0,5
2 10 30 65 0,54 90 16 48,6 0,54
3 10 20 59 0,59 80 12 47,2 0,59
4 10 90 57 0,63 -- 57 -- 0,63
Caso BaseDemanda
incrementada
Incremento
producido
x1 28,5 25 -3,5

x2 6,2 16 +9,8
x3 13 12 -1,0
x4 62,1 57 -5,1
p1 0,57 0,5 -0,07
p2 0,62 0,54 -0,08
p3 0,65 0,59 -0,06
p4 0,65 0,63 -0,02
Notar que las asignaciones son unidades de agua, el resto son tantos por uno.
Método CEA
i ei ci Ei cDi xiCEA xDi
CEA PiCEA
1 80 50 80 110 30 50 0,60
2 10 30 60 90 30 70 1,00
3 10 20 80 80 20 80 1,00
4 10 90 90 -- 30 -- 0,33
Caso BaseDemanda
incrementada
Incremento
producido
x1 40 30 -10,0
x2 10 30 +20,0
x3 20 20 +0,00
x4 40 30 -10,0
p1 0,8 0,60 -0,20
p2 1,00 1,00 +0,00
p3 1,00 1,00 +0,00
p4 0,44 0,33 -0,11
Método CEL
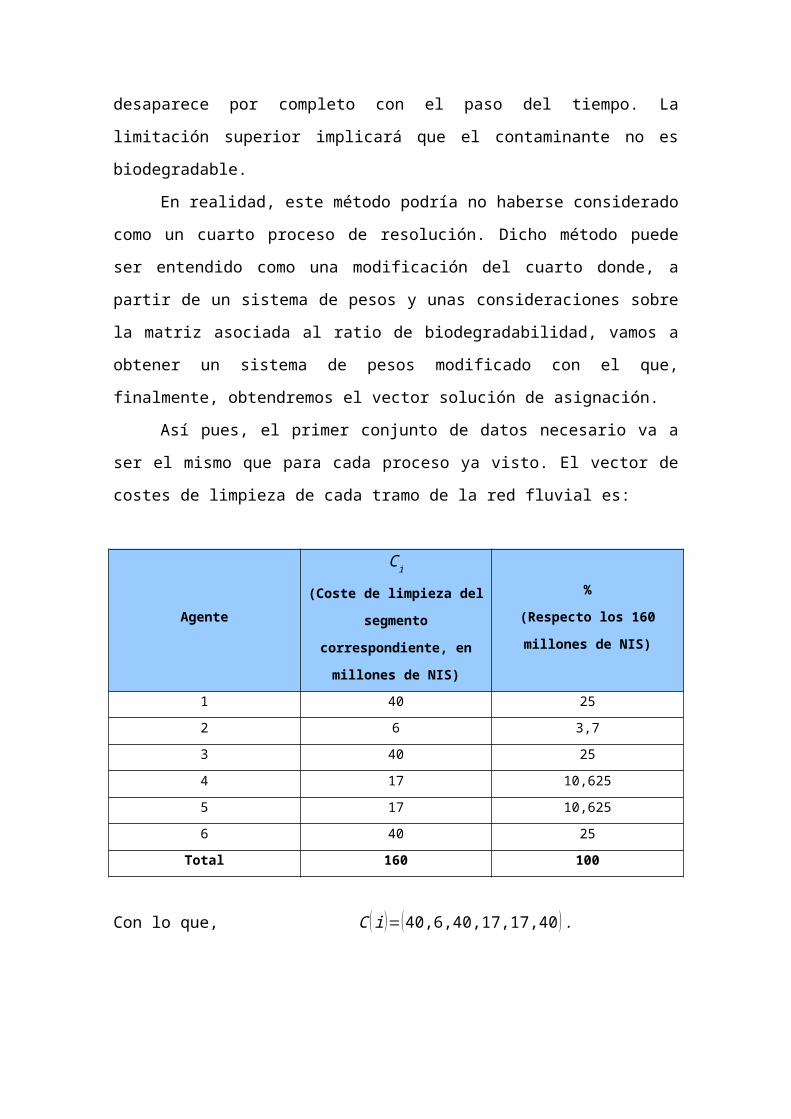
i ei ci Ei cDi xiCEL xDi
CEL PiCEL
1 80 50 80 110 30 50 0,60
2 10 30 60 90 10 50 0,33
3 10 20 60 80 0 60 0,00
4 10 90 70 -- 70 -- 0,78
Caso BaseDemanda
incrementada
Incremento
producido
x1 33,33 30 -3,33
x2 0 10 +10,0
x3 3,33 0 -3,33
x4 73,33 70 -3,33
p1 0,66 0,60 -0,06
p2 0,00 0,33 +0,33
p3 0,16 0,00 -016
p4 0,81 0,78 -0,03
Notar que las asignaciones son unidades de agua, el resto son tantos por uno.
Método TAL
i ei ci Ei cDi xiTAL xDi
TAL PiTAL
1 80 50 80 110 25 55 0,50
2 10 30 65 90 15 60 0,50
3 10 20 70 80 10 60 0,50
4 10 90 70 -- 60 -- 0,67
Caso BaseDemanda
incrementada
Incremento
producido
x1 27,5 25 -2,5
x2 5 15 +10,0

x3 10 10 +0,0
x4 67,5 60 -7,5
p1 0,34 0,50 +0,16
p2 0,50 0,50 +0,00
p3 0,50 0,50 +0,00
p4 0,75 0,67 -0,08
Notar que las asignaciones son unidades de agua, el resto son tantos por uno.
Como se puede apreciar en todos los casos el sumatorio de la cuantía total
asignada es exactamente la misma que la asignación en el caso base, es decir, de 110
unidades de agua ya que la cantidad de oferta no se ha visto modificada.
Además, podemos comprobar como se cumple la propiedad sobre las Demandas
monótonas ya que, en todos los casos, el porcentaje de agua asignada al agente dos se ve
incrementado al aumentar la cantidad demandada por él mismo.
5.5.3.2 Análisis de sensibilidad: Dotación incrementada
Método PRO
i ei ci Ei λ cDi xiPRO xDi
PRO PiPRO
1 80 50 80 0,67 70 33,33 46,9 0,67
2 30 10 76,67 0,77 90 7,67 69,3 0,77
3 10 20 79 0,79 80 15,8 63,2 0,79
4 10 90 73 0,81 -- 73 -- 0,81
Caso BaseDotación
incrementada
x1 28,5 33,33
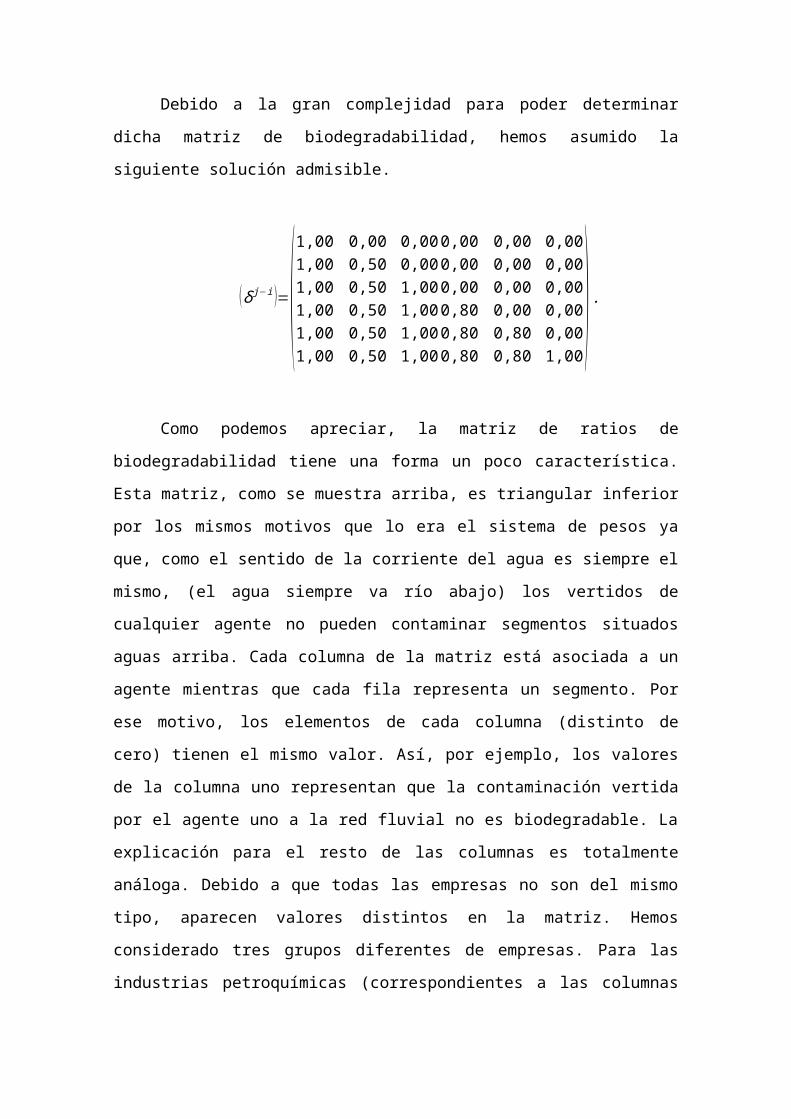
x2 6,2 7,67
x3 13 15,8
x4 62,1 73
p1 0,57 0,67
p2 0,62 0,77
p3 0,65 0,79
p4 0,65 0,81
Notar que las asignaciones son unidades de agua, el resto son tantos por uno.
Método CEA
i ei ci Ei cDi xiCEA xDi
CEA PiCEA
1 80 50 80 70 50 30 1,00
2 30 10 60 90 10 50 1,00
3 10 20 60 80 20 60 1,00
4 10 90 70 -- 50 -- 0,55
Caso BaseDotación
incrementada
x1 40 50
x2 10 10
x3 20 20
x4 40 50
p1 0,8 1,00
p2 1,00 1,00
p3 1,00 1,00
p4 0,44 0,55
Método CEL

i ei ci Ei cDi xiCEL xDi
CEL PiCEL
1 80 50 80 70 40 40 0,80
2 30 10 70 90 0 70 0,00
3 10 20 80 80 10 70 0,50
4 10 90 80 -- 80 -- 0,89
Caso BaseDotación
incrementada
x1 33,33 40
x2 0 0
x3 3,33 10
x4 73,33 80
p1 0,66 0,80
p2 0,00 0,00
p3 0,16 0,50
p4 0,81 0,89
Notar que las asignaciones son unidades de agua, el resto son tantos por uno.
Método TAL
i ei ci Ei cDi xiTAL xDi
TAL PiTAL
1 80 50 80 70 37,5 42,5 0,75
2 30 10 72,5 90 5 67,5 0,50
3 10 20 77,5 80 10 67,5 0,50
4 10 90 77,5 -- 77,5 -- 0,86
Caso BaseDotación
incrementada
x1 27,5 37,5
x2 5 5
x3 10 10

x4 67,5 77,5
p1 0,34 0,75
p2 0,50 0,50
p3 0,50 0,50
p4 0,75 0,86
Notar que las asignaciones son unidades de agua, el resto son tantos por uno.
Como se puede apreciar en todos los casos la suma de la cuantía total asignada
ya no es la misma que en el caso base. Ahora, ya que la dotación del agente dos ha sido
incrementada en veinte unidades, todas las asignaciones propuestas ya no suman 110
unidades de agua sino 130. Este es el motivo por el cual se ha suprimido la última
columna de la comparación entre el caso base y el caso de la dotación incrementada.
Además, podemos comprobar como se cumple la propiedad sobre el Recurso
monótono ya que en todos los casos el agente dos que ha tenido un incremento de la
dotación nunca se ve afectado por un reparto inferior que en el caso base, siendo
siempre su asignación mayor o igual.
5.5.4 Comparación de los métodos secuenciales con sus alternativas
En esta sección vamos a comparar nuestra solución con un par de alternativas
que pueden ser aplicadas para resolver los problemas de reparto de agua de un río. La
primera comparación la vamos a realizar con la propuesta por Ambec y Sprumont
(2002). La segunda comparación va a ser únicamente importante para el caso especial
donde toda la dotación del agua del río que se va a repartir viene a cargo del agente uno
mientras que el resto de los agentes no tiene dotación alguna. En este caso, las reglas de
bancarrota pueden ser aplicadas de forma directa, mientras se mantenga el tratamiento
de las dotaciones y el orden lineal de los agentes.
Aunque estas alternativas poseen una serie de ventajas, en esta sección veremos
las desventajas frente a las soluciones mostradas en este capítulo. En el primer caso, esta
solución va a favorecer notablemente a los agentes situados aguas abajo mientras que en
el segundo caso, esa solución es únicamente válida para un caso especial de los
problemas de reparto de agua de un río.

5.5.4.1 Comparación con los problemas de reparto de Ambec y Sprumont
Ambec y Sprumont propusieron en 2002 una solución axiomática basada en las
teorías ATS y ATI. Estos dos principios son usados como un límite inferior y superior en
la aspiración sobre el bienestar de una coalición de agentes. Ambec y Sprumont (2002)
demostraron que hay una única distribución de beneficio tal que proporciona una
solución de compromiso entre estos dos principios. El agua queda asignada de tal
manera que el bienestar de cada agente sea igual a su contribución marginal a la
coalición compuesta por todos los agentes aguas arriba.
La comparación de los problemas de reparto secuencial con la solución
propuesta por Ambec y Sprumont (2002) no es sencilla ya que su solución se basa en
términos de bienestar mientras que la literatura de bancarrota proporciona una solución
en términos de recurso distribuido. La comparación es posible únicamente si asumimos
que los beneficios son lineales al uso del agua. En este caso, la solución propuesta por
Ambec y Sprumont (2002) cae en la clase de problemas de reparto secuencial. De
hecho, es un caso extremo de este tipo de problemas con x i=e i ,∀ i∈N . La solución
asigna a cada agente el derecho de su propia dotación. Obviamente, esta solución es
independiente del vector de demandas ya que Ambec y Sprumont (2002) no consideran
demandas en su modelo.
Esta alternativa puede ser un compromiso atractivo entre las teorías ATS y ATI
pero nos vamos a cuestionar su aplicabilidad por dos razones. La primera es que Ambec
y Sprumont (2002) encontraron una solución al problema de reparto de un río usando
una combinación de límites inferiores y superiores del bienestar. De esta forma, se
asume que los agentes situados aguas arriba no aspiran a un nivel de bienestar más alto
que el que se pueden asegurar ellos mismos. La segunda razón es que la solución
proporcionada por Ambec y Sprumont (2002) asigna todas las ganancias procedentes de
la cooperación a los agentes situados aguas abajo sin que sea muy convincente.
5.5.4.2 Comparación con los problemas de bancarrota sin dotación
Si todo el agua que se va a repartir entre un serie de agentes se origina en la
cabeza del río, es decir, e i=0 ∀ i>1, y el orden de los agentes no se considera, entonces

las reglas de bancarrota pueden ser directamente aplicadas a esta clase tan especial de
problemas de reparto de un río.
Como primer comentario, esta aproximación parece no estar relacionada con las
reglas de reparto secuencial. Hay una serie de reglas, sin embargo, para estas
aproximaciones aplicadas a las reglas de reparto secuencial. Esta clase de reglas
incluyen a todas las de bancarrota que satisfacen ventajas de la fusión o la división
(O`Neill (1982), Thomson (2003)). La regla PRO es una de las reglas de bancarrota
perteneciente a esta clase. Así, la solución proporcionada por la aplicación de la regla de
reparto secuencial basada en PRO corresponde con la solución dada por este método
PRO aplicada a los problemas de reparto de un río. Esto queda reflejado en la siguiente
proposición.
Proposición 5.3 La regla de reparto secuencial basada en el método PRO satisface la
siguiente propiedad. Si e i=0 , ∀ i>1 , entonces piPRO=
e1
∑j∈N
c j
,∀ i∈ N .
Esta proposición nos indica que para esta clase de problemas de reparto de un
río, las propiedades que caracterizan al método PRO, también lo hacen para su
correspondiente regla de reparto secuencial. Consecuentemente, cada agente recibe la
misma proporción de su demanda. De esta forma, las diferencias entre las soluciones
inducidas por PRO y su correspondiente regla de reparto secuencial vienen dadas por la
distribución de las demandas sobre los agentes. Estas diferencias no son como resultado
del orden lineal de los agentes.
Este resultado implica que la solución proporcional de un problema de
bancarrota iguala la solución proporcional a una secuencia de problemas de bancarrota
reducidos. Por lo tanto, esta clase de problemas de reparto de un río son una
generalización de los problemas de bancarrota. Notar, sin embargo, que desde la
perspectiva del reparto de un río esta clase de problemas reflejan un caso muy especial
debido a la específica suposición sobre el abastecimiento del agua del río.
5.5.5 Análisis de resultados, discusión y conclusiones
Empezamos analizando las distintas soluciones que nos han proporcionado cada
uno de los métodos usados en el problema de reparto del agua de un río. Para ello,

representamos en la siguiente tabla todas las soluciones obtenidas.
PRO CEA CEL TAL
x1 28,5 40 33,33 27,5
x2 6,2 10 0 5
x3 13 20 3,33 10
x4 62,1 40 73,33 67,5
p1 0,57 0,8 0,66 0,34
p2 0,62 1,00 0,00 0,50
p3 0,65 1,00 0,16 0,50
p4 0,65 0,44 0,81 0,75
Como podemos apreciar en la tabla anterior, mostramos cuatro soluciones
diferentes dadas por cada uno de los métodos anteriores. De esta forma, el método PRO
se centra en realizar un reparto en el cual todos los agentes cubran un porcentaje de su
demanda muy similar unos de otros. Así, aplicando el método PRO y con dotaciones de
partida se consigue que cada agente, independientemente de su demanda, cubra
aproximadamente el sesenta por ciento de su demanda. El segundo método que
resolvimos fue el CEA. Este método intenta repartir a cada agente la misma cantidad de
agua hasta llegar al límite máximo de cada agente. Para nuestro caso, como el límite de
los agentes dos y tres es inferior al de los agente uno y cuatro, su demanda se satisface
por completo a consta de perjudicar la del último agente. El tercer método es el CEL.
Este método restaba una cantidad constante a cada agente procedente del reparto de la
cantidad de agua que faltaba para cumplir con toda la demanda, sin que la asignación
sea nunca negativa. De esta forma y dado los límites de cada agente, los agentes que
menos demandan son los que menos perciben mientras que los agentes que más
demandan son los que más agua reciben. En nuestro caso, el agente dos se queda sin
reparto alguno, el agente tres cubre muy poca parte de su demanda pero, sin embargo
los agentes uno y cuatro cubren gran parte de su demanda, en especial el agente cuatro
que es el que más agua demanda de todo el conjunto de agentes. El último de los
métodos que aplicamos fue el método TAL. Este método es el más complejo de todos y
posiblemente es el que de un reparto más “justo” frente a sus alternativas. Con este

método todos los agentes cubren un buen porcentaje de su demanda siendo el menos
beneficiado el agente uno al no llegar a un cuarenta por ciento de su demanda.
Un tema sobre el que podemos discutir es cuando un problema reducido de
reparto de un río, aunque matemáticamente equivale a un problema de bancarrota,
pueda ser de hecho interpretado como tal. La respuesta de esta cuestión depende de la
interpretación de Ei, el recurso que va a ser distribuido entre i y Di. En los problemas de
bancarrota, el recurso está separado de los agentes. En un problema reducido de reparto
de un río, Ei es el flujo de agua disponible al agente i. Si no se consideran las demandas,
la dotación podría ser interpretada como la propiedad de derechos, es decir, la dotación
de cada agente es la cantidad de agua de la que dispone.
En nuestra interpretación, la superposición de las demandas implica que las
dotaciones no representen derechos de propiedad. Así, una regla de reparto necesita ser
introducida como un derecho. El flujo disponible del agente i, Ei , no se interpreta como
un derecho de propiedad, pero si como un recurso cuyo nivel puede influenciar la
solución del reparto del agua de un río, dependiendo de la regla de reparto usada. En
este caso, Ei es separada de los agentes y, por lo tanto, un problema reducido de reparto
de un río es completamente equivalente al problema de bancarrota. Aunque esta
interpretación proporciona un apoyo adicional al uso de reglas de reparto secuencial, no
podemos afirmar que esta interpretación sea más convincente que las alternativas.
En este capítulo hemos analizado los problemas de reparto de un río con un
orden lineal de los agentes quienes poseen una dotación y demanda de recurso. Hemos
construido una clase de reglas de reparto secuencial mediante la transformación del
problema de reparto del río a una secuencia de problemas reducidos de reparto de un
río. Estos problemas reducidos son matemáticamente equivalentes a los problemas de
bancarrota y, por lo tanto, pueden ser resueltos usando las reglas de bancarrota.
Los resultados de este capítulo pueden ser perfectamente adaptados a
aplicaciones sobre la negociación en reparto del agua de un río a nivel nacional o
internacional. La suposición a seguir es estar de acuerdo en una regla de reparto que
asigne el derecho de agua a cada uno de los agentes.
5.6 Estado del arte: Líneas actuales de negociación
En esta última sección, vamos a exponer las líneas más novedosas de
negociación en este contexto basada en la teoría de juegos cooperativos. Para ello,

consideraremos el problema del reparto de agua entre unos agentes situados a lo largo
de un río. Cada agente, tiene preferencias cuasi-lineales sobre el agua del río y el dinero,
donde el beneficio sobre el consumo de una cantidad de agua viene proporcionado por
una función de beneficio continua y cóncava. Una solución eficiente del problema
repartirá el agua del río entre todos los agentes sin malgastar dinero. Introducimos
varios axiomas para caracterizar cuatro soluciones distintas.
5.6.1 Introducción
Consideramos el problema de reparto del agua entre varios agentes, que pueden
ser pueblos, ciudades, industrias, etc., ubicados a lo largo de un río. Dado que el número
de agentes involucrados en el reparto del agua de un río es normalmente pequeño y que,
los intercambios de agua son escasos, el comercio de agua del río tiene lugar por la
firma de contratos entre las partes involucradas. Estos contratos directamente
especifican la cantidad de agua a repartir, así como, la cantidad de dinero que debe ser
pagada por el agua. El objetivo de la teoría de juegos cooperativos es el de proporcionar
el resultado de la elección de un agente, que depende de decisiones tomadas por otros,
siendo los agentes que toman decisiones, los encargados de firmar contratos vinculantes
bilaterales o multilaterales para hacer cumplir dicha cooperación. Por este motivo, la
teoría de juegos cooperativos es una de las principales herramientas usadas para el
modelado de problemas hidráulicos.
Ambec y Sprumont (2002) presentaron un modelo en el que una serie de agentes
están situados a lo largo de un río simple, de un sólo flujo desde aguas arriba hasta
aguas abajo. Cada agente, suponemos que tiene preferencias cuasi-lineales sobre el
agua del río y el dinero, donde el beneficio del consumo de una cantidad de agua viene
dado por una función de beneficio diferencial, estrictamente creciente y estrictamente
cóncava. La asignación de reparto del agua entre todos los agentes es eficiente cuando
ésta maximiza la suma total de beneficio. A fin de mantener una asignación de agua
eficiente, los agentes pueden ser compensados cada uno por el pago de transferencias
monetarias. Cada asignación de agua y transferencia proporciona una distribución de
bienestar, donde la utilidad de un agente es equivalente a su beneficio del consumo de
agua más su transferencia monetaria, que puede ser negativa. Mediante la derivación de
un juego cooperativo a partir de su modelo, Ambec y Sprumont (2002) encontraron la
forma de cómo el agua del río debe asignarse a los agentes y proponen que las

transferencias monetarias se deben realizar a fin de lograr una distribución justa del
bienestar. Ellos propusieron la solución incremental aguas abajo como la distribución
de bienestar que satisface tanto los límites inferiores como los limites superiores de la
aspiración. Dicha solución, puede ser considerada como el vector de contribución
marginal de su juego cooperativo correspondiente al orden de los agentes ubicados a lo
largo del río, desde aguas arriba hasta aguas abajo.
Ambec y Ehlers (2008), Khmelnitskaya (2010), van den Brink, van der Laan y
Moes (2010) y Wang (2011) generalizaron el modelo de Ambec y Sprumont (2002) de
una forma específica. Ambec y Ehlers (2008) permitieron que la función de beneficio de
cada agente fuese diferenciable y estrictamente cóncava, pero no necesariamente
incremental. Khmelnitskaya (2010) consideró ríos con estructura de tipo árbol
permitiendo múltiples salidas o deltas. Van den Brink, van der Laan y Moes (2010)
estudiaron ríos con múltiples salidas y propusieron una nueva clase de solución basada
en la distribución de agua según el principio conocido como Territorial Integration of
all Basin States (TIBS). Finalmente, Wang (2011) propuso una solución al modelo
original tipo línea en donde el comercio de agua está restringido a parejas de agentes
vecinos.
En este apartado, primero, vamos a tomar la suposición de Ambec y Ehlers
(2008) sobre que la función de beneficio únicamente se le exija continuidad y
concavidad. La segunda consideración consiste en caracterizar dos soluciones existentes
mediante el modelo de flujo único, introduciendo algunos axiomas. La última
consideración es proponer y caracterizar dos nuevas soluciones para el modelo de flujo
único usando nuevos axiomas.
En contraste con los documentos mencionados anteriormente, en este apartado
evitamos el desvío de modelar la situación del río como un juego cooperativo. En su
lugar, vamos a imponer inmediatamente axiomas sobre la clase de todos los problemas
de distribución del agua del río. Esto tiene como principal ventaja que los axiomas que
proponemos directamente pueden ser interpretados en términos de asignación de agua
(Beneficio).
Mientras que la mayoría de los axiomas utilizados en la literatura también
derivan de los principios de distribución de agua, ellos son axiomas sobre juegos
cooperativos y no problemas de asignación de agua. Esto a menudo induce a error
cuando se trata de interpretar los axiomas de juego cooperativos en términos de
asignación de agua.

5.6.2 Problemas de ríos con funciones de beneficio cóncavas
En el trabajo “Sharing a river”, Ambec y Sprumont (2002) consideraron el
problema de encontrar una distribución justa del bienestar resultante a la asignación de
flujos de agua a lo largo de un río internacional a los agentes situados en su cauce. Sea
N= {1, …,n } un conjunto de agentes, que supusieron países, a lo largo del río,
numerados sucesivamente desde aguas arriba hasta aguas abajo, y sea e i≥ 0 las entradas
de agua sobre el territorio del agente i, i=1 , …, n. Para cada agente i, se va a suponer
una función de utilidad cuasi-lineal asignada a cada pareja ( x i ,t i ) con x i∈R+¿¿ una
cantidad de agua asignada a i y t i∈R+¿¿ una compensación monetaria a i, la utilidad
vi ( x i ,t i )=b i ( x i )+t i,
donde b i : R+¿→ R ¿ es una función continua dando un beneficio b i ( x i ) al agente i del
consumo x i de agua. En lo siguiente, denotaremos una situación del río por la terna
( N ,e ,b ), donde N es el conjunto de agentes, e∈ R+¿n¿ es el vector de las entradas no
negativas y b=(b i) i∈N es el conjunto de las funciones de beneficio.
Por la uni-direccionalidad del flujo de agua desde aguas arriba hasta aguas abajo,
a cada agente se le puede asignar la entrada de agua a su territorio y su agente aguas
arriba, pero la entrada de agua de algunos agentes aguas abajo no puede ser asignada a
este agente. De esta forma, una asignación de agua x∈ R+¿n¿ asigna una cantidad de agua
x i al agente i ,i=1 , …, n, bajo la restricción
1. ∑i=1
j
x i ≤∑i=1
j
ei , j=1 ,…, n.
Es decir, x∈ R+¿n¿ es una asignación de agua si, para cada agente j, la suma de las
asignaciones de agua x1 , …, x j es como máximo igual a la suma de las entradas e1 ,…, e j
. Los rendimientos totales de bienestar de una asignación de agua x son ∑i=1
n
bi ( x i ). Un
esquema de compensación t∈ Rn proporciona una compensación monetaria t i al agente
i ,i=1 , …, n, bajo la restricción

∑i=1
n
t i ≤0 .
Como se mencionó anteriormente, una pareja ( x ,t ) de una asignación de agua x y
un esquema de compensación t proporcionan utilidades v ( x i ,t i ) dado por la expresión
anterior para cada i=1 ,…,n. Una pareja ( x ,t ) es Pareto eficiente si no se malgasta ni
agua ni dinero, es decir, ( x ,t ) es Pareto eficiente si y sólo si x∈ Rn maximiza el
beneficio del problema Dado por
max∑i=1
n
b i ( x i ) s .t .∑i=1
j
x i ≤∑i=1
j
ei , j=1 , …, n y x i≥ 0 , i=1 ,…, n ,
y el esquema de compensación t∈ Rn está en el balance del presupuesto: ∑i=1
n
t i=0.
En Ambec y Sprumont (2002) se asume que cada función de beneficio es una
función incremental y estrictamente cóncava, que es diferenciable para cada x i>0 , cuya
derivada tiende a infinito cuando x i tiende a cero. Bajo esta suposición, el problema de
maximización anterior tiene una única solución x¿. Decimos que z∈ Rn , es una
distribución de beneficio si existe una pareja Pareto eficiente ( x¿ , t ) tal que
z i=b i ( x i¿)+ ti , i=1 ,…,n .
Así, una distribución de bienestar z distribuye el máximo beneficio disponible
entre todos los agentes de la asignación x i¿ al agente i ,i=1 ,…,n, e implementando un
balance en el presupuesto monetario del esquema de compensación t. Inversamente, se
puede apreciar que para la asignación optima x¿ , cada balance del presupuesto del
esquema de compensación t, induce a una distribución de bienestar.
En Ambec y Sprumont (2002) el problema de encontrar un balance del
presupuesto del esquema de compensación “justo” o, equivalentemente una justa
distribución del beneficio, está modelada por un juego cooperativo de utilidad
transferible. Así, se propone una solución para el juego cooperativo tomando en
cuenta dos principios para un reparto justo de bienestar dados en Kilgour y Dinar

(1995). Estos principios son los que ya hemos visto a lo largo de todo el proyecto y que
vamos a recordar ahora. El principio ATS (Absolute Territorial Sovereignty) consideraba
que cada país no tiene limitaciones sobre el uso de sus propios recursos naturales.
Para un río internacional estas leyes sobre la doctrina de Harmon, declaran que un país
tiene absoluta soberanía sobre las entradas a un río situado en su propio territorio y
así, cada agente es el dueño legal de sus propias entradas de agua. Este principio,
favorece los países situados aguas arriba mediante la implantación que, para cada
j=1 ,…, n, la coalición {1 , …, j } del primer país j aguas arriba tiene derecho a usar las
entradas totales de agua en sus propios territorios sin tener en cuenta las
consecuencias que puedan tener para los países agua abajo. Por otra parte, el principio
de Territorial Integration of all Basin States (TIBS) favorece a los países aguas abajo
declarando que todas las entradas de agua pertenecen a todos los países juntos, sin
importar en que parte del río se tome. Esto convierte a todos los países dueños legales
de todas las entradas de agua, sin considerar a su propia contribución de flujo.
Teniendo en cuenta la uni-direccionalidad de flujo de agua desde aguas arriba hasta
aguas abajo, la interpretación del principio TIBS viene dada por el principio de
Unlimited Territorial Integrity (UTI), puntualizando que, sin restricciones usadas por un
país en sus propios recursos naturales, se permite únicamente si no causa daño alguno
a la soberanía de otros países. Este principio implica que un país j tiene derecho a usar
todas las entradas de agua situadas en su propio territorio y en los territorios de todos
sus países situados aguas arriba. Como consecuencia, esto lleva a situaciones de
conflicto en el sentido de que la entrada e i al territorio del país i , tiene derecho hacia
cada país j ≥ i.
Como se argumenta en Ambec y Sprumont (2002), la doctrina Harmon implica
estabilidad en el sentido que para cada i y cada j ≥ i el bienestar total que el conjunto de
los países consecutivos {i ,i+1 , …, j } , entiende que una pareja de Pareto eficiente ( x¿ , t )
debe ser al menos igual a la suma de beneficios que esos países pueden garantizar por si
mismos, mediante la asignación óptima de sus propias entradas e i ,…, e j. En el caso
j=i , esta noción de estabilidad se reduce a racionalidad individual, imponiendo que el
pago de un país i debe ser al menos igual al beneficio b i (e i ) de la entrada de agua en su
propio territorio. Sea i=1 y j ≥ i, la estabilidad implica estabilidad aguas arriba,
significando que para cada conjunto de países consecutivos situados aguas arriba

{1 ,…, j }, j=1 ,…, n, el total de beneficio del primer país j aguas arriba en la pareja
de Pareto eficiente ( x¿ , t ) debe ser al menos igual al máximo que estos países puedan
garantizar por sí mismos, mediante la resolución del siguiente problema de
maximización del beneficio
max∑i=1
n
b i ( x i ) s .t .∑i=1
k
x i ≤∑i=1
k
ei , k=1 ,…, j y x i ≥0 , i=1 , …, j .
Bajo la suposición tomada sobre la función de beneficio en Ambec y Sprumont
(2002), para cada j este problema de maximización tiene una única solución. Vamos a
llamar esta solución como x j=( x1j ,…, x j
j ) y el beneficio total correspondiente por
v j=∑i=1
j
bi ( xij ). Notar que x i
n=x i¿ , i=1 ,…,n y vn∑
i=1
n
b i (x i¿ ). Esto lleva a que la estabilidad
aguas arriba requiera que ∑i=1
j
zi ≥ v j , para cada j=1 ,…, n.
Por un lado, basándose en el principio UTI favoreciendo a los países aguas
abajo, Ambec y Sprumont (2002) impusieron la condición que para cada coalición
aguas arriba {1 , …, j }, j=1 ,…,n, el beneficio total de estos países esta limitado como
mucho por su nivel de aspiración, siendo el máximo beneficio que ellos pueden obtener
la distribución de sus propias entradas de agua. Así, el propio nivel de aspiración
requiere que para cada j el beneficio total ∑i=1
j
zi del primer país j situado aguas arriba es
al menos igual al beneficio obtenido de resolver el problema de maximización de
beneficio, es decir, ∑i=1
j
zi ≤ v j para cada j=1 ,…, n. Esto proporciona que los
requerimientos de la estabilidad aguas arriba y la propiedad del nivel de aspiración
juntos necesiten que ∑i=1
j
z i=v j para cada j=1 ,…, n, y así, determinar la única
distribución de beneficio z i=v i−v i−1 ,i=1, …, n, con v0 definido como igual a cero. La
correspondiente solución incremental aguas abajo asignan a cada problema de río
( N ,e ,b ), la distribución de beneficio d ( N ,e ,b )∈Rn dada por
d i ( N ,e , b )=vi−v i−1 , i=1 ,…,n .

Aunque esta distribución de beneficio quede determinada por los requerimientos
de estabilidad aguas arriba y por la propiedad del nivel de aspiración, es también estable
para cada coalición {i ,i+1 , …, j } ,1 ≤i ≤ j≤ n de agentes consecutivos.
Ambec y Ehlers (2008) generalizaron el juego básico de un río descrito
anteriormente por la permisión de saciar o satisfacer a los agentes. Esto significa que
ellos debilitan la consideración sobre los beneficios en Ambec y Sprumont (2002)
mediante la eliminación de requerimientos para que la función de beneficios vaya
estrictamente incrementándose. Ellos asumieron para cada función de beneficio
b i : R+¿→ R ,¿ una función estrictamente cóncava, diferenciable para cada x i>0 , cuya
derivada tiende a infinito cuando x i tiende a cero. Bajo esta suposición, es posible que
para algunos puntos c i>0, llamados puntos de saciedad del agente i, el beneficio va
incrementándose desde x i=0 hasta c i, alcanzando su máximo valor en c i, y decreciendo
para x i>c i. La existencia de puntos de saciedad tiene una seria consecuencia para el
correspondiente juego cooperativo. Sin el punto de saciedad, únicamente las coaliciones
de agentes consecutivos pueden operar, con el objetivo de maximizar su beneficio de
unión mediante la asignación óptima de sus propias entradas de agua entre cada una de
ellas (bajo el principio ATS, diciendo que los agentes en cada coalición tienen el
derecho de usar sus propias entradas de agua). Una coalición no consecutiva de dos
subconjuntos de agentes no pueden nunca transferir agua desde la parte aguas arriba
hasta la parte aguas abajo ya que la función incremental de beneficio podría hacer que
toda el agua enviada desde los agentes aguas arriba hasta los agentes aguas abajo sea
tomada por los agentes situados en una posición intermedia. A cambio, bajo la débil
suposición de Ambec y Ehlers (2008), podría ser rentable para una coalición de agentes
no consecutivos el transferir aguas desde aguas arriba hacia aguas abajo cuando todos
los agentes situados en una posición intermedia tienen un punto de saciedad. Aunque
algunos de estos flujos puedan tomarse por los agentes en situación intermedia, estos
agentes únicamente podrán coger agua de los puntos de saciedad. Cuando el flujo es
demasiado grande, una parte será destinada a los agentes aguas abajo, posibilitando la
cooperación entre las dos partes de la coalición. Este fenómeno podría causar
externalidades positivas sobre los agentes situados entre las dos partes de la coalición no
consecutiva. Como resultado, en el correspondiente juego cooperativo, la ganancia que
puede ser obtenido por la coalición depende del comportamiento del resto de los
agentes, dando lugar a un modelo más complicado, denominado juego con función
particionada. Sin embargo, parece claro que para cada j, la coalición aguas arriba
{1 ,…, j } tiene externalidades libres, es decir, el máximo beneficio que cada coalición
puede obtener por la asignación de sus propias entradas de agua óptimamente repartidas
entre ellas mismas, no depende del comportamiento de los agentes después de j, y ese
máximo nivel de bienestar viene dado por los valores v j , j=1 , …,n, de la solución de
problemas donde se maximiza el beneficio anterior. Así, la solución incremental aguas
abajo d ( N , e , b ) queda bien definida para los problemas de rio ( N ,e ,b ) con puntos de
saciedad, y en Ambec y Ehlers (2008) se muestra que también para situaciones de rio
con agentes saciables esta solución está únicamente determinada por el requerimiento
de la estabilidad aguas arriba y la propiedad de nivel de aspiración. Aunque ellos
modelaron el problema del río con agentes de saciedad como un juego en una función
partitiva, algunas veces caracterizan una solución la cual únicamente usa los niveles de
beneficio que pueden ser obtenidos por coaliciones consecutivas que contengan al
agente 1. Estos niveles son externalidades libres. Bajo la suposición de e i≤ ci para cada
i, la solución es también estable para cada coalición {i ,i+1 , …, j } ,1 ≤i ≤ j≤ n, de agentes
consecutivos.
Vamos a debilitar las suposiciones de Ambec y Ehlers (2008), y Ambec y
Sprumont (2002), mediante la imposición a la función de beneficio de ser cóncava en
lugar de estrictamente cóncava.
Suposición 5.2 En una situación de río (N , e , b), cada función de beneficio b i : R+¿→ R ¿
es cóncava y continua para x i>0.
La suposición dice que b i puede no estar decreciendo, pero además permite que
exista un intervalo [c i , c i ] , c i ≥ ci tal que b i este incrementándose para x i<c i, constante
para x i∈ [c i ,ci ], y decreciendo cuando x i>ci. En el último caso, el punto c i es el punto
de saciedad del agente i. El agente i alcanza su mayor beneficio en c i. Todo el nivel del
consumo de agua entre c i y c i también alcanza su máximo beneficio, pero el consumo
de agua mayor a c i proporciona un menor beneficio. Asignamos que para c i=0 y c i=∞
(significando que b i es constante para x i≥ c i≥ 0). En particular, esta asigna a
b i ( x i )=bi (0 ) , para cada x i≥ 0.

Bajo esta suposición, el problema de maximización anterior no tiene por qué
tener una única solución, aunque sigue estando bien definido. Sea X j un conjunto de
soluciones del problema de maximización para un país j, j=1 ,…, n, para cada solución
x j∈X j tenemos que v j=∑i=1
j
bi ( xij ) y para cada xn∈ Xn, la pareja de presupuesto ( xn ,t )
proporciona una distribución de beneficio
z i=b i (x in )+ ti , i=1 ,…, n ,
Con la suma de las cuotas igual a el beneficio total de Pareto eficiente
vn=∑i=1
n
bi (x in ).
Bajo esta suposición, el correspondiente juego cooperativo no esta bien definido
a menos que hagamos una suposición adicional sobre el consumo de agua de agentes
que tengan una función de beneficio cóncava pero no estrictamente cóncava.
Consideremos de nuevo una coalición no consecutiva formada por partes consecutivas
aguas arriba y partes consecutivas aguas abajo. Si algún agente j situado entre estas dos
partes tiene una función de beneficio con un punto de saciedad c j y un punto c j>c j tal
que su beneficio sea constante entre c j y c j y decreciendo a partir de ese punto, entonces
el juego cooperativo no está bien definido sin una suposición adicional sobre el
consumo de agua del agente j en caso de flujo de agua enviado desde aguas arriba hasta
aguas abajo llegando a ser tan grande que la disponibilidad de agua del agente j exceda
su punto de saciedad c j. En lugar de hacer tal suposición impondremos más adelante
axiomas relacionados directamente a la situación de río ( N . e , b ) y a partir de estos
obtendremos soluciones únicas para un problema de distribución de bienestar sin
modelar la situación del río como un juego cooperativo. Haciendo esto no
necesitaremos una suposición adicional.
5.6.3 Soluciones analíticas
Vamos a estudiar cuatro soluciones para este tipo de problemas. Para cada una
de ellas se van a definir una serie de axiomas (nueve en total) para poder caracterizar las
cuatro soluciones.

5.6.3.1 La solución incremental aguas abajo
El primer resultado es que en la clase W N de problemas de río ( N ,e , b ) la
solución incremental aguas abajo d esta caracterizada por los cuatro axiomas que se van
a definir a continuación:
Eficiencia. Para cualquier problema de río ( N ,e , b ) tenemos que
∑i∈N
f i ( N , e ,b )=vn (e ,b ).
Disminución de las propiedades compartidas. Para cualquier problema de río
( N ,e ,b ) tenemos que f i ( N , e ,b )≥ bi (0 ) para todo i∈N .
Nivel de propiedad débil en la aspiración. Para cualquier problema de río ( N ,e , b )
tenemos que f i ( N , e , b )≤ maxx i ≤∑
j∈Ne j
bi ( xi ) para todo i∈N .
Independencia de los beneficios aguas abajo. Para cada pareja de problemas de río
( N ,e ,b ) y ( N , e , b ' ) tal que b j=( b' ) j , para todo j ≤ i, tenemos que
f i ( N ,e , b )=f i ( N , e , b ' ).
Teorema 5.2 Una solución f en la clase W Nde problemas de ríos es igual a la solución
incremental aguas abajo d si y sólo si f satisface eficiencia, disminución de las
propiedades compartidas, nivel de propiedad débil en la aspiración e independencia de
los beneficios aguas abajo.
El axioma de independencia es usado en el Teorema 5.2 y en su caracterización.
Notar que la solución está totalmente determinada por los niveles de bienestar obtenidos
mediante la resolución de problemas de maximización de beneficio y que estos
problemas están bien definidos cuando la función de beneficios satisface la suposición
de la Sección 3. Así pues, no tenemos necesidad de tomar una suposición adicional
correspondiente a agentes con una función de beneficio cóncava pero no estrictamente
cóncava.
5.6.3.2 La solución incremental aguas arriba

Como se vio en la sección anterior, la propiedad del nivel de aspiración pone un
límite superior sobre la cuota total a los miembros de una coalición aguas arriba
{1 ,…, j } , j=1 ,…,n. Además, acorde a la solución incremental aguas abajo todas las
ganancias en beneficios obtenidas cuando algunas de las entradas a los territorios de las
coaliciones aguas arribas {1 , …, j }, quedan asignadas a sus agentes aguas abajo i ,i> j,
yendo desde los agentes aguas abajo en el sentido que una coalición aguas arribas es
únicamente compensada por su pérdida de beneficio total. Alternativamente, van der
Brink, van der Laan y Vasil’ev (2007) introdujeron la solución incremental aguas
arriba. De acorde a esta solución todas las ganancias en beneficios que ocurren cuando
algunas de las entradas a los territorios de una coalición aguas arriba {1 , …, j } están
asignadas a sus agentes aguas abajo i ,i> j, que van desde los agentes aguas arriba
teniendo en cuenta que la cuota total a la coalición aguas abajo { j+1 ,…,n } es
exactamente igual al beneficio total que ellos pueden lograr mediante la asignación de
sus propias entradas óptimamente repartidas entre ellos. En van den Brink, van der Laan
y Moes (2010) unaxioma denominada justa-TIBS es introducido, junto a eficiencia,
proporciona la solución incremental aguas abajo y las solución incremental aguas arriba
en los casos extremos.
Para definir la solución incremental aguas arriba, vamos a considerar para cada
j=1 ,…, n, el problema de maximización de bienestar
max∑i= j
n
b i ( x i ) s .t .∑i= j
k
x i ≤∑i= j
k
ei , k=1 , …, n y x i ≥0 , i= j ,…, n .
Es decir, para el agente j el óptimo del problema de maximización asigna las
entradas e j , …, en entre todos los agentes en la coalición { j , j+1 ,…,n }, dado la uni-
direccionalidad del flujo. Bajo la suposición de la sección tres, estos problemas de
maximización no tienen una solución única aunque estén bien definidos. Para una
solución y j=( y jj , …, yn
j ) del problema de maximización para el agente j, llamaremos
w j (e , b )=∑i= j
n
b i ( yij ) como el máximo beneficio que los agentes en { j , j+1 ,…,n } pueden
obtener mediante la distribución de sus propias entradas. Notar que para j=1 el
problema de maximización actual es equivalente al problema anterior, ya que
w1 (e , b )=vn (e , b ) es el beneficio total máximo que puede ser obtenido cuando se

asignan todas las entradas de forma óptima entre todos los agentes. Para cada solución
y1 el balance presupuestado de la pareja ( y1 , t ) proporciona una distribución de
beneficio
z i=b i ( yi1 )+ ti , i=1 ,…, n .
Con la suma de las cuotas igual al beneficio total Pareto eficiente
w1 (e , b )=∑i= j
n
bi ( y i1 ).
La solución incremental aguas arriba asigna a cada agente i su contribución
marginal al beneficio cuando los agentes entran posteriormente desde los agentes
situados aguas más abajo hasta los agentes emplazados aguas más arriba. Así, la
solución incremental aguas arriba asigna a cada situación de río ( N ,e ,b ) la distribución
de beneficio u ( N , e , b )∈Rn dada por
ui ( N , e ,b )=wi (e , b )−w i+1 (e ,b ) , i=1 , …,n .
Con wn+1 (e , b )=0.
El siguiente teorema, en la clases W N de problemas de río ( N , e , b ) , la solución
incremental aguas arriba u está caracterizada por los siguientes cuatro axiomas.
Eficiencia. Para cualquier problema de río ( N ,e , b ) , tenemos que
∑i∈N
f i ( N , e ,b )=vn (e ,b ).
Disminución de las propiedades compartidas. Para cualquier problema de río
( N ,e ,b ) , tenemos que f i ( N , e , b )≥ bi (0 ) , para todo i∈ N .
Propiedad de sequía. Para cualquier problema de río ( N ,e , b ) con e j=0, para todo
j ≤ i, tenemos que f i ( N , e , b )≤ bi (0 ).
Independencia de las entradas aguas arriba. Para cada pareja de problemas de río
( N ,e ,b ) y ( N ,e , b ' ) tal que e j=e ' j para todo j ≥ i, tenemos que f i ( N ,e , b )= f i ( N , e ,b ' ).

Teorema 5.3 Una solución f de la clase W Nde problemas de río es igual a la solución
incremental aguas arriba u si y sólo si satisface los axiomas de eficiencia, disminución
de las propiedades compartidas, la propiedad de sequía y la independencia de los flujos
aguas arriba.
Notar que la solución está completamente determinada por los niveles de
bienestar, obtenidos mediante la resolución de los problemas de maximización. Así,
según la definición de la solución incremental aguas arriba satisface estabilidad para
cada coalición aguas abajo {i ,i+1 , …, n }. Al igual que la solución incremental aguas
abajo, esta también cumple los requerimientos de estabilidad para cada coalición de
agentes consecutivos, tal como aparece en los documentos de van den Brink, van der
Laan y Vasil’ev (2007).
5.6.3.3 La solución aguas abajo
Como se ha mencionado antes, las soluciones incrementales aguas arriba y aguas
abajo satisfacen estabilidad para cada coalición de agentes consecutivos y, por tanto,
ambas están acorde a la doctrina de Harmon afirmando que cada agente es el dueño
legal de su propia entrada de agua. Bajo esta doctrina la solución incremental aguas
abajo favorece a los agentes situados aguas abajo en todo lo posible. La solución
incremental aguas arriba favorece pues a todos los agentes situados aguas arriba.
Como se discutió anteriormente, la doctrina Harmon entraba en conflicto con el
principio TIBS el cual toma a todos los agentes como dueños legales de todas las
entradas de agua. Por ejemplo, de acorde con el principio TIBS todos los agentes tienen
derecho a obtener un reparto de las entradas de agua e i en el territorio del agente uno.
Siguiendo el principio TIBS en su forma más extrema, un posible argumento
comprende que la mayoría de los agentes situados aguas abajo tienen derecho a recibir
todas las entradas de agua. Bajo esta condición, los agentes aguas arriba tienen la
posibilidad de “comprar” agua para compensar a la mayoría de los agentes situados
aguas abajo por su pérdida de agua. Teniendo en cuenta este punto de vista sobre los
derechos del agua, vamos a definir la solución aguas abajo s, la cual asigna a una
situación de rio (N , e , b)∈W N la distribución de beneficio s ( N , e , b )dada por
si ( N ,e , b )=wi (e , b )−w i+1 ( e , b ) , i=1 ,…,n .
Donde wn+1 (e , b )=0 y w j (e , b )=∑i= j
n
b i ( yij ) , j=1 , …, n con y j=( y j
j , …, ynj ) una
solución del problema de maximización de beneficio,
max∑i= j
n
b i ( x i ) s .t .∑i= j
k
x i ≤∑i= j
k
ei , k= j ,…, n y xi ≥ 0 ,i= j , …,n .
Hablemos de las diferencias entre los dos últimos problemas de maximización.
En el primero, los agentes en una coalición aguas abajo { j , j+1 ,…,n } pueden
únicamente consumir su propia entrada de agua, mientras que en el último, dichos
agentes pueden usar sus propias entradas de agua y también todas las entradas de agua
en su territorio de cualquier agente aguas arriba. Así, para una coalición { j , j+1 ,…,n } el
problema de maximización actual optimaliza la asignación de entradas e1 ,…, en entre
los agentes en la coalición, dada la uni-direccionalidad del flujo de agua. Notar que para
j=1 el problema de maximización es de nuevo igual al problema que le precede. Así
pues, w1 (e , b )=vn (e , b ) es el beneficio total máximo que puede ser obtenido cuando la
asignación de todas las entradas ha sido optimizada entre todos los agentes. Debido a
que ∑i=1
n
s i ( N ,e ,b )=w 1 (e ,b )=vn (e , b ), también la solución aguas abajo distribuye el
máximo beneficio total alcanzable entre todos los agentes y así, esta solución es también
eficiente.
Resulta que la solución aguas abajo puede ser caracterizada, análogamente a
como se hizo con la solución incremental aguas abajo en el Teorema 5.2, pero ahora la
independencia de los beneficios aguas abajo es remplazada por la independencia de los
beneficios aguas arriba.
En el siguiente teorema, en las clases W N de problemas de río ( N ,e , b ) la
solución aguas abajo s esta caracterizada por los siguientes cuatro axiomas.
Eficiencia. Para cualquier problema de río ( N ,e , b ) tenemos que
∑i∈N
f i ( N , e ,b )=vn (e ,b ).
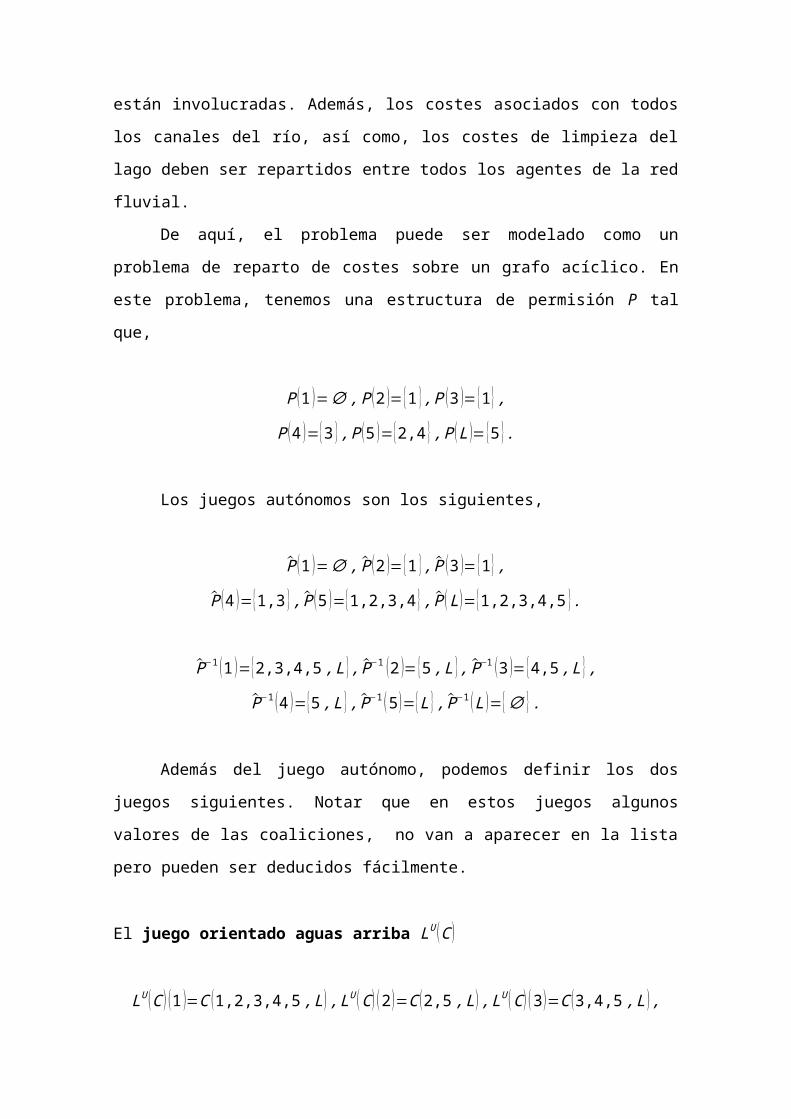
Disminución de las propiedades compartidas. Para cualquier problema de río
( N ,e ,b ) tenemos que f i ( N , e , b )≥ bi (0 ) , para todo i∈ N .
Nivel de propiedad débil en la aspiración. Para cualquier problema de río ( N ,e , b )
tenemos que f i ( N , e , b )≤ maxx i ≤∑
j∈Ne j
bi ( xi ) , para todo i∈N .
Independencia de los beneficios aguas arriba. Para cada pareja de problemas de río
( N ,e ,b ) y ( N ,e , b ' ) tal que b j=( b' ) j para todo j ≥ i, tenemos que f i ( N , e , b )=f i ( N ,e , b ' )
.
Teorema 5.4 Una solución f en la clase W Nde problemas de ríos es igual a la
solución aguas abajo si y sólo si f satisface eficiencia, disminución de las propiedades
compartidas, nivel de propiedad débil en la aspiración e independencia de los
beneficios aguas arriba.
Notar que en los problemas de maximización de beneficio, los agentes en la
coalición aguas abajo { j , …,n } tienen derecho a obtener el agua total de la entrada ∑i∈N
ei.
Cuando alguna cantidad de agua es asignada a otros agentes, de acorde con la solución
aguas abajo la mayoría de los agentes situados aguas abajo están completamente
compensados por sus pérdidas de beneficios mediante la compensación económica de
los otros agentes. Esto es una interpretación extrema del principio TIBS.
Consecuentemente, la solución aguas abajo nos satisface estabilidad aguas arriba y, por
lo tanto, viola la doctrina de Harmon: claramente todos los derechos de agua les son
otorgados a la mayoría de los agentes situados aguas abajo.
5.6.3.4 La solución aguas arriba
Como se ha visto en puntos anteriores, la solución incremental aguas arriba
favorece a los agentes situados aguas arriba en todo lo posible bajo la restricción de
estabilidad para las coaliciones aguas abajo. Al igual que la solución aguas abajo
homóloga, ahora vamos a introducir la solución aguas arriba r la cual favorece a los
agentes aguas arriba tanto como sea posible dada la uni-direccionalidad del flujo de

agua. Esto toma parte en el principio de Harmon en su forma más extrema mediante el
requerimiento de los agentes desde aguas arriba hasta aguas abajo en recibir el mayor
beneficio adicional alcanzable de sus entradas de agua dado que las entradas de sus
agentes aguas arriba han sido también distribuidas.
Para definir la solución aguas arriba, primero vamos a reconsiderar la
distribución de beneficio acorde con la solución incremental aguas arriba. Esta solución,
proporciona una cuota un ( N , e , b )=wn (e ,b ) al último agente n, donde wn ( e , b ) es el
máximo beneficio que el agente n puede lograr por el consumo de únicamente sus
propias entradas de agua. Después, el agente n−1 recibe
un−1 ( N ,e ,b )=wn−1 (e , b )−wn (e ,b ), donde wn−1 (e ,b ) es el beneficio total que los agentes
n−1 y n pueden conjuntamente conseguir mediante la distribución de sus aguas
óptimamente. De esta forma el agente n−1 recibe su contribución marginal al beneficio
total desde su entrada de agua en−1 hasta la entrada de agua en, teniendo en cuenta todas
las entradas situadas aguas arriba igual a cero. En general el agente i recibe su
contribución marginal al beneficio total de su entrada de agua e i a las entradas situadas
aguas abajo e j , j>i, teniendo en cuenta todas las entradas situadas aguas arriba e j , j>i,
igual a cero.
Al igual que hicimos con la solución incremental aguas arriba, la solución aguas
arriba puede ser definida de otra manera, empezando con el agente 1. Cuando todas las
entradas son cero, cada agente tiene una cuota b i (0 ) , i=1 , …, n. Ahora, sea la mayor
entrada aguas arriba e1 de tal forma que esté distribuida óptimamente entre todos los
agentes. Así, el agente uno recibe además de b1 (0 ) una cuota igual a la contribución
marginal del beneficio total cuando distribuyendo sus entradas e1 óptimamente entre
todos los agentes y asumiendo todas las demás entradas igual a cero, es decir, la
solución aguas arriba r proporciona al agente uno un pago r1 ( N , e , b )= v1 ( e , b ), donde
v1 (e ,b )=b1 (0 )+∑j=1
n
(b j ( y j1 )−b j (0 ))=b1 ( y1
1 )+∑j=2
n
(b j ( y j1)−b j (0 ) ) .
Con y1=( y11 , …, yn
1 ) una solución del problema de maximización de beneficio
max∑j=1
n
b j ( x j ) s .t .∑j=1
n
x j≤ e1 , x j ≥0 , j=1 , …,n .

A continuación, las entradas e1 y e2 están distribuidas óptimamente sobre todos
los agentes asumiendo todas las demás entradas igual a cero, y el agente dos recibe su
pago inicial b2 (0 ) más el beneficio total adicional que la distribución de su entrada e2
genera al beneficio obtenido de e1. Consecuentemente, para el agente i todas las
entradas e j , j ≤i están distribuidas óptimamente sobre todos los agentes asumiendo
todas las entradas a los agentes situados aguas abajo j>i,igual a cero, y el agente i
recibe su cuota inicial b i (0 ) , más el beneficio total adicional que la distribución de su
entrada e i genera al beneficio obtenido desde e i hasta e i−1. En general, la solución aguas
arriba r asigna a la situación del río ( N ,e , b )∈W N , la distribución de beneficio
r ( N , e ,b ) dada por
r i ( N ,e ,b )= v i (e , b )−v i−1 ( e ,b ) , i=1 ,… ,n .
Donde v0 (e ,b )=0 y vi (e ,b )=∑j=1
i
b j ( y ji )+ ∑
j=n+1
n
(b j ( y ji )−b j (0 ) ), i=1 , …, n , con
y i=( y1i ,…, yn
i ) una solución del problema de maximización de beneficio
max∑j=1
n
b j ( x j ) s .t .{ ∑j=1
n
x j≤∑j=1
i
e j ,
∑j=1
k
x j ≤∑j=1
k
e j , k=1 , …,i−1
x j≥ 0 , j=1, …, n .
Notar que este problema de maximización optimiza la distribución de entrada de
agua de los agentes en {1 ,…,i } sobre todos los agentes, teniendo en cuenta que para
cada agente k<i el consumo total de los primeros k agentes es al menos igual a la suma
de sus propias entradas. Los pagos de la distribución de beneficio r ( N , e , b ) puede ser
también escrita como
ri ( N , e , b )= v i (e ,b )−v i−1 ( e , b )
¿∑j=1
i
b j ( y ji )+ ∑
j=i+1
n
(b j ( y ji )−b j (0 ) )−(∑j=1
i−1
b j ( y ji−1)+∑
j=1
n
(b j ( y ji−1 )−b j ( 0 ) ))

¿bi (0 )+∑j=i
n
(b j ( y ji )−b j ( y j
i−1 )) ,i=1 ,…, n .
Para j=n, el problema de maximización anterior vuelve a ser igual al problema
inicial, siendo vn (e , b )=vn ( e ,b ) , el beneficio total máximo que puede ser obtenido
cuando se asigna todas las entradas de agua entre los agentes. Debido a que
∑i=1
n
ri ( N , e ,b )=vn (e ,b )=vn (e , b ), también la solución aguas arriba distribuye el bienestar
total máximo alcanzable que los agentes pueden conseguir juntos y, por lo tanto también
se considera una solución eficiente. Resulta que la solución aguas arriba puede ser
caracterizada de forma similar a como se realizó en la solución incremental aguas arriba
mediante los axiomas de eficiencia y de la disminución de propiedades compartidas,
pero ahora se van a cambiar un par de propiedades. La propiedad de sequía va a ser
sustituida por la propiedad de no contribución y el axioma de independencia de las
entradas aguas arriba se va a remplazar por la independencia de las entradas aguas
abajo.
El siguiente teorema establece que en la clase W N de problemas de río ( N ,e , b )
la solución aguas abajo s esta caracterizada por los siguientes cuatro axiomas.
Eficiencia. Para cualquier problema de río ( N ,e , b ) tenemos que
∑i∈N
f i ( N , e ,b )=vn (e ,b ).
Disminución de las propiedades compartidas. Para cualquier problema de río
( N ,e ,b ) tenemos que f i ( N , e , b )≥ bi (0 ) , para todo i∈ N .
La propiedad de no contribución. Para cualquier problema de río ( N ,e , b ) donde
i∈N con e i=0, tenemos que f i ( N ,e , b )≤ bi (0 ).
Independencia de los beneficios aguas abajo. Para cada pareja de problemas de río
( N ,e ,b ) y ( N ,e , b ' ) tal que b j=( b' ) j para todo j ≤ i, tenemos que f i ( N , e , b )=f i ( N ,e , b ' )
.

Teorema 5.5 Una solución f en la clase W Nde problemas de ríos es igual a la solución
aguas arriba r si y sólo si f satisface eficiencia, disminución de las propiedades
compartidas, la propiedad de no contribución y la independencia de las entradas aguas
abajo.
Acorde a la solución aguas arriba, cada coalición aguas arriba {1 , …, j } recibe el
beneficio total que puede ser alcanzado mediante la asignación óptima de las entradas
de agua a cada coalición sobre todos los agentes. Claramente, el bienestar de una
solución del correspondiente problema de maximización anterior, es al menos tan alto
como el bienestar de una solución del problema de maximización inicial de beneficio en
donde las entradas de una coalición {1 , …, j } están distribuidas óptimamente entre ellas.
Así pues, la solución aguas arriba ciertamente satisface estabilidad para las coaliciones
aguas arriba y, además, también satisface el principio de Harmon para las coaliciones
aguas arriba. Sin embargo, la solución aguas arriba no suele satisfacer estabilidad por lo
general. Por ejemplo, el agente n recibe un beneficio marginal de vn (e , b )− vn−1 (e ,b ),
siendo la diferencia entre el beneficio total de los consumos de agua yn e yn−1. No se
puede decir nada sobre esta diferencia y el beneficio bn ( en ) que el agente n puede
obtener mediante el consumo de su propia agua. Además, es posible que ocurra que
rn ( N ,e , b )<bn ( en ), violando la racionalidad individual y, por tanto, estabilidad. Sin
embargo, podríamos decir que para cada coalición {i ,i+1 , …, j } de agentes consecutivos
la solución aguas arriba refleja una débil similitud al principio de Harmon en el sentido
de que cada coalición recibe lo máximo posible bajo la limitación del pago total a sus
coaliciones aguas arriba, siendo igual al bienestar total máximo alcanzable de todos los
países que pueden estar involucrados en la asignación de sus entradas e1 ,…, e i−1.
5.6.4 Comparaciones y conclusiones de las cuatro soluciones
Hemos considerado el problema del reparto de agua entre agentes situados a lo
largo de un río. Hemos adaptado el modelo de Ambec y Sprumont (2002) mediante una
débil suposición de la función de beneficio de los agentes. Usando nueve axiomas
diferentes hemos sido capaces de caracterizar cuatro soluciones para este modelo. La
solución incremental aguas abajo, originalmente sugerida por Ambec y Sprumont
(2002), puede ser caracterizada por eficiencia, disminución de las propiedades
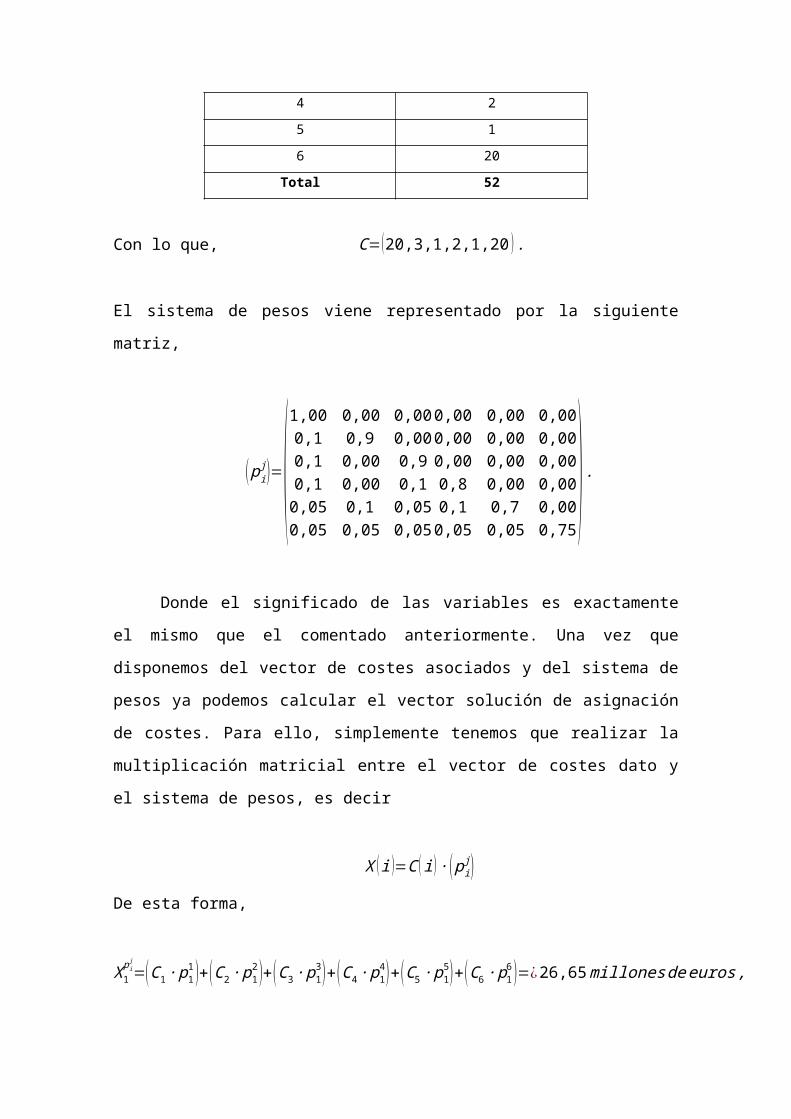
compartidas, nivel de propiedad débil en la aspiración y la independencia de los
beneficios aguas abajo. La solución incremental aguas arriba, originalmente sugerida
por van der Brink, van der Laan y Vasil’ev (2007), puede ser caracterizada por
eficiencia, disminución de las propiedades compartidas, la propiedad de sequía y la
independencia de las entradas aguas arriba. La nueva solución aguas abajo puede ser
caracterizada por eficiencia, disminución de las propiedades compartidas, nivel de
propiedad débil en la aspiración y la independencia de los beneficios aguas arriba. Por
último, la nueva solución aguas arriba puede ser caracterizada por eficiencia,
disminución de las propiedades compartidas, la propiedad de no contribución y la in-
dependencia de las entradas aguas abajo.
La taxonomía se muestra en la siguiente tabla (donde, para cada solución, los
cuatro “si” en negrita proporcionan la axiomatización de la respectiva solución.
Como se puede apreciar en la tabla, ninguna de las cuatro soluciones satisface
simultáneamente la propiedad de nivel débil de aspiración y la independencia de las
entradas aguas arriba. Análogamente ninguna de las cuatro soluciones satisface a la vez
la propiedad de no contribución y la independencia de beneficios aguas abajo. Además,
la independencia de los beneficios aguas abajo queda únicamente satisfecha por la
solución incremental aguas abajo y la independencia de entradas aguas arriba es
satisfecha sólo por la solución incremental aguas arriba.
Ante los axiomas elegidos, parece que la independencia de los beneficios aguas
abajo, proporcionan una baja compensación a los países situados aguas arriba,
comparados con la independencia de las entradas aguas arriba. Las otras dos

propiedades de independencia son satisfechas por dos soluciones. La independencia de
los beneficios aguas arriba queda satisfecha por la solución aguas abajo y la solución
incremental aguas arriba, la independencia de las entradas aguas abajo queda satisfecha
por la solución aguas abajo y la solución incremental aguas abajo.
Finalmente, consideremos un caso donde aplicamos las cuatro soluciones a
un caso particular, donde cada agente tiene un beneficio marginal constante de más de
un punto de saciedad y un beneficio marginal de cero para lo posterior. En este caso,
únicamente la solución incremental aguas abajo y la solución aguas abajo pueden ser
implementadas sin transferencia monetaria entre los agentes. Esto significa que, cuando
los países situados a lo largo de un río internacional que únicamente demandan el agua
del río y que no están dispuestos a transferir dinero a cada uno, de las cuatro soluciones
presentadas en este capítulo sólo pueden usarse dos.

Referencias
[1] Aadland D. and Kolpin V. (1998), Shared irrigation costs: An empirical and axiomatic
analysis, Mathematical Social Sciences 849, 203-218.
[2] Aczel, J. (1996), Function Equations and Their Applications, Academic Press, New
York.
[3] Ansink, E., and H-P. Weikard (2011), “Sequential sharing rules for river sharing
problems”, Social Choice and Welfare, forthcoming.
[4] Ambec, S., and L. Ehlers (2008), “Sharing a river among satiable agents”, Games
and Economic Behavior 64, 35-50.
[5] Ambec, S. and Sprumont, Y. (2002). “Sharing a River.” Journal of Economic Theory
107, 453-462.
[6] Barret, S. (1994) “Conflict and cooperation in managing international water
resources,” Working Paper 1303, World Bank, Washington.
[7] Bergantiños, G. and Vidal-Puga, J.J. (2004) "Additive rules in bankruptcy problems
and other related problems", Mathematical Social Sciences, 47, 87-101.
[8] Bergantiños, G. and Vidal-Puga, J.J. (2007) "Additivity in minimum cost spanning
tree problems", Journal of Mathematical Economics, 45, (1-2), 38-42.
[9] Berge, C. (1962), The Theory of Graphs and its applications, Methuen & Co-John
Wiley & Sons, London - New York, 1962.
[10] Bird, C.C. (1976), On cost allocation for a spanning tree: a game theoretic
approach, Networks 6, 335-350.

[11] Bollobas, B. (1988), Modern Graph Theory, Springer-Verlag, New York.
[12] Boyd, J. (2003). “Water pollution taxes: A good ideal doomed to failure.”
Discussion paper 03-20, Research for the Future, Washington.
[13] Brink, R. van den and Gilles, R. P. (1996), Axiomatizations of the Conjunctive
Permission Value for Games with Permission Structures, Games and Economic
Behavior 12, 113-126.
[14] Brink, R.van den, ''An Axiomatization of the Disjunctive Permission Value for
Games with a Permission Structure'' (1997), International Journal of Game
Theory 26, 27-43.
[15] Brink, R. van den (2004), Null or Zero Players: The Difference between the
Shapley Value and the Egalitarian Solution, Tinbergen Discussion Paper TI 2004-
127/1, Tinbergen Institute, VU University, Amsterdam.
[16] Brink, R. van den, G. van der Laan, and V.A. Vasil'ev (2007), “Component effcient
solutions in line-graph games with applications”, Economic Theory 33, 349-364.
[17] Brink, R. van den, and G. van der Laan. (2008), “Comment on Sharing a polluted
river”.
[18] Brink, R. van den, G. van der Laan, and N. Moes (2010), “Fair agreements for
sharinginternational rivers with multiple springs and externalities”, Tinbergen
Discussion Paper TI 2010-096/1, Tinbergen Institute, VU University, Amsterdam.
[19] Brink, R. van den, Estévez-Fernández, A., van der Laan G., and Moes N. (2011),
“Indepence Axioms for water allocation”
[20] Canterbury, E.R. and Marvasti, A. (1992), “The Coase theorem as a negative
externality.” Journal of Economic Issues 26, 1179-1189.
[21] Chun, Y. (1988), "The proportional solution for rights problems", Mathematical
Social Sciences 15, 231-246.
[22] Coase, R. (1960) “The problem of social cost.” Journal of Law and Economics 1,
1-14.
[23] Debing Ni, and Yuntong Wang. (2006), Sharing a polluted river. School of
Management, University of Electronic Science and Technology of China,
Chengdu, Shicguan and the Departament of Economics, University of Windsor,
Windsor, ON, Canada N9B 3P4.

[24] Diestel, R. (2000), Graph Theory, 2nd ed., Springer, New York.
[25] Dinar, A., M.W. Rosegrant, and R. Meinzen-Dick (1997), “Water allocation
mechanisms: Principles and examples”, Policy Research Working Paper 1779,
World Bank, Washington D.C.
[26] Dutta, B. and Ray, D. (1989), A concept of egalitarianism under participation
constraints, Econometrica 57, 615-635.
[27] Gómez-Rúa, M. (2008), "Sharing a polluted river through environmental taxes".
RGEA WP. Second revision in Investigaciones Económicas.
[28] Faulhaber, G. (1975), “Cross-subsidization: Pricing in public enterprises.”
American Economic Review 65, 966-977.
[29] Graham, D.A., Marshall, C. and Richard, J.F (1990), “Differential payments within
a bidder coalition and the Shapley value”, American Economic Review 80, 493-
510.
[30] Granot D, and Huberman G. (1981), Minimal cost spanning tree games,
Mathematical Programming 21, 1-18.
[31] Granot D, and Huberman G. (1984), On the core and nucleolus of minimal cost
spanning tree games, Mathematical Programming 29, 323-347.
[32] Godana, B. (1985), “Africa’s shared water resources.” France Printer, London.
[33] González-Díaz J., García-Jurado I., Fiestras-Janeiro G, An Introductory Course on
Mathematical Game Theory (2010) Amer Mathematical Society.
[34] Gilles, R.P., G. Owen, and R. van den Brink, ''Games with Permission Structures:
the Conjunctive Approach'' (1992), International Journal of Game Theory 20,
277-293.
[35] Harary, F. (1969) Graph theory, Addison-Wesley, Reading, Mass..
[36] Kalai E. and Samet D. (1987) "On weighted Shapley values" International Journal
of Game Theory 16, 205-222.
[37] Khmelnitskaya, A.B. (2010), “Values for rooted-tree and sink-tree digraph games
and sharing a river”, Theory and Decision 69, 657-669.
[38] Kilgour, D.M., and A. Dinar (1995), “Are stable agreements for sharing
international river water now possible?”, Policy Research Working Paper 1474,
World Bank, Washington D.C.
[39] Kilgour, M., and Dinar A. (1996), “Are stable agreements for sharing international
river waters now possible?” Working Paper 1474, World Bank, Washington .
[40] Koster, M., Molina, E., Sprumont, Y., and Tijs, S. H. (2001), Sharing the cost of a
network: core and core allocations, International Journal of Game Theory 30,
567-599.
[41] Littlechild, S., and Owen, G. (1973), A Simple Expression for the Shapley Value in
a Special Case, Management Science 20, 370-372.
[42] Littlechild, S. (1974), A Simple Expression for the Nucleolus in a Special Case,
International Journal of Game Theory 3, 21-30.
[43] Littlechild S., and Thompson G. (1977), Aircraft landing fees: a game theoretic
approach, The Bell Journal of Economics 8, 186-204.
[44] Moulin, H. (1987) "Equal or proportional division of a surplus, and other
methods" International Journal of Game Theory 19, 161-186.
[45] Moulin, H. (1988). Axioms of Cooperative Decision Making, Cambridge University
Press.
[46] Moulin, H. (2002), Axiomatic cost and surplus sharing, in: Arrow, K.J., Sen, A.K.,
and Suzumura, K. (Eds.), Handbook of Social Choice and Welfare, Volume 1,
North-Holland, Amsterdam.
[47] Moulin, H. (2003), “Fair Division and Collective Welfare”, MIT Press.
[48] Moulin, H. and Sprumont, Y. (2005) "On demand responsiveness in additive cost
sharing", Journal of Economic Theory 125, 1-35.
[49] OECD (2004), Sustainable Development in OECD Countries: Getting the Policies
Right, OECD, Paris.
[50] OECD (2006), Database on Economic Instruments, OECD, Paris.
http://www2.oecd.org/ecoinst/queries/index.htm
[51] OECD (2008a) "Costs of Inaction on Key Environmental Challenges". OECD, Paris.
[52] OECD (2008b) "Freshwater", OECD Environmental Outlook to 2030. OECD, Paris.
[53] Parrachino, I., A. Dinar, and F. Patrone (2006), “Cooperative game theory and its
application to natural, environmental and water resource issues: 3. Application
to water resources”, World Bank Policy Research Working Paper 4074, World
Bank, Washington D.C.
[54] Pérez J., Jimeno J.L, Cerdá E. Teoría de Juegos (2003), Pearson Education.

[55] Rodríguez, J., (2003), Teoría de Grafos, Kariña Editores, Mérida.
[56] Sánchez E., (1999), Juegos cooperativos que describen modelos en los que el
orden es inherente al problema.
[57] Shapley, L.S. (1953) “A Value for n-Person Games.” In Contributions to the
Theory of Games II. edited by H. W. Kuhn and A. W. Tucker. Annals of
Mathematics Studies 28, 307-17.
[58] Shapley, L.S. (1953), "Additive and non-additive set functions" Ph.D. Thesis.
Princeton University.
[59] Tiebout, C. (1956) “A Pure Theory of Local Expenditures.” Journal of Political
Economy 64, 416-24. [60] Wang, Y. (2011), “Trading water along a river”, Mathematical Social Sciences 61,
124-130.
[61] Willian, T. (2002), “Axiomatic and game-theoretic analysis of bankruptcy and
taxation problems: a survey”, Department of Economics, University of Rochester,
Rochester, New York, NY 14627, USA.