Embed Size (px)
Citation preview

2012 년도 한국철도학회 추계학술대회 논문집 KSR2012A033
흡인제어식 초고속 자기부상열차용 Prototype초전도 하이브리드
자기부상시스템 개발
Development of Prototype Superconducting-hybrid Magnetic Levitation System for High-speed EMS Maglev
이창영*†, 조정민*, 이진호*, 한영재*, 황영진**, 고태국**
Chang Young Lee*†, Jung Min Jo*, Jin Ho Lee*, Young Jae Han*, Young Jin Hwang**, Tae Kuk Ko**
Abstract This paper deals with the development of a prototype superconducting-hybrid magnetic levitation system for high-speed EMS Maglev. The electromagnet was designed to interface with the existing propulsion system used in the German high-speed Maglev. The rating levitation force of the magnet was designed to correspond to the weight of the magnet at a 20 mm levitation gap. Electromagnetic forces were simulated and compared with the test results in order to verify the design feasibility of the levitation system. The system was successfully demonstrated up to the vehicle running speed of 500 km/h. Operating tests revealed that the HTS-EM was fully operational in zero-power control mode. And the operability of the system was finally verified in this study. Keywords : Electromagnet, EMS, Maglev, Superconductor 초 록 본 논문은 흡인제어식 초고속 자기부상열차에 적용하기 위하여 기존 상전도 전자석보다 부상력을 증가시킬 수 있는 초전도 하이브리드 자기 부상 시스템의 개발을 다루고 있다. 설계 사양은 독일의 초고속 자기부상열차에 사용된 상전도 전자석의 형상 사양을 기반으로 하였으며, 시스템의 부상공극은 20 mm로 설계하였다. 설계 형상에 대한 FEM 해석을 통해 전자석의 성능을 추정하고 시작품을 제작하였다. 시작품에 사용된 초전도 코일은 1세대 고온 초전도체인 BSCCO 선재를 사용 하였으며, 액체질소에 의한 냉각 방식을 적용하였다. 500km/h 주행 속도를 모의할 수 있는 시험 장치를 통해 부상력, 부상제어 특성 등 시작품의 성능 평가를 수행하였다. 평가 결과에 따라 설계 및 운전의 타당성을 입증하였다.
주요어 : 전자석, 흡인제어부상, 자기부상열차, 초전도
1. 서 론 초고속 자기부상열차는 바퀴식 철도의 주행 한계를 극복할 수 있는 미래 첨단 교통
수단이지만, 기존 바퀴식 철도 대비 높은 궤도건설비용은 실용화의 확대에 제약이 되고 있다.
중국 상하이 영업노선으로 운행중인 독일의 초고속 자기부상열차는 흡인제어식(Electromagnetic
† 교신저자: 한국철도기술연구원([email protected])
* 한국철도기술연구원
** 연세대학교 공과대학 전기전자공학과

Suspension : EMS) 부상기술을 특징으로 하고 있다. 상전도 전자석을 이용하기 때문에 차량과
궤도 사이는 8~10 mm 의 공극을 유지하며 부상 및 추진이 되도록 설계 되어 있다. 그러나
부상공극이 좁기 때문에 정밀한 궤도시공을 필요로 하며, 이 때문에 바퀴식 고속철도에 비해
궤도건설비용이 높아진다. 부상 공극을 크게 하면 궤도 시공 정밀도 기준을 완화시킬 수
있으나, 기자력이 큰 전자석이 필요하며 기존 상전도 코일만으로는 부피 및 허용 전류등의
문제로 기자력을 높이는데 한계가 있다.
초전도 하이브리드 자기부상시스템은 초전도 하이브리드 전자석(Superconducting Hybrid
Electromagnet : SH-EM)을 이용한 자기부상시스템으로서, 종래 상전도 전자석 보다 전자석의
기자력을 크게 할 수 있기 때문에 부상 공극을 크게 하면서도 충분한 부상력을 얻을 수 있는
특징이 있다. 본 논문에서는 흡인제어식 초고속 자기부상열차에 적용할 목적으로 Prototype 의
초전도 하이브리드 부상 시스템의 설계 및 제작, 그리고 시운전 결과를 소개 하고자 한다.
2. 본 론
2.1 흡인제어식 초전도 하이브리드 자기부상 시스템 개요
2.1.1 흡인제어식 초고속 자기부상열차 개요
Fig. 1 은 독일의 흡인제어식 초고속 자기부상열차(Transrapid07)의 추진, 부상 및 부상 전자석의
구조와 성능을 나타내고 있다. 차량의 추진은 선형동기전동기방식으로서, 지상 궤도에 설치된 3상
코일에 흐르는 전류의 크기와 주파수를 제어하여 추진력과 속도를 제어한다. 차량의 부상과
안내를 위하여 차량대차의 측면 및 하부에 각각 안내 및 부상전자석이 설치된다. 전자석에
흐르는 전류로서 전자석과 궤도사이의 흡인력을 제어하여 간격을 유지한다. 부상전자석은
차량의 부상뿐 아니라 선형동기전동기 추진 시스템의 계자극으로 사용되며 N-S 가 교대로
반복된 6개의 자극이 하나의 전자석을 구성한다. 8~10 mm 의 부상 공극으로 최고 450 km/h 의
주행이 가능하다[1-2].
2.1.2 부상 시스템 구조 및 운전 방법
Fig. 2는 초전도 하이브리드 부상 전자석의 구조 및 부상 제어 운전 개략도이다. 자기부상에
필요한 전자석의 기자력은 초전도 코일의 DC 전류로서 발생시키며, 구리코일에 흐르는 전류
를 제어하여 부상을 유지시킨다. 전자석의 초전도 코일은 1 Hz 미만의 DC 전류원으로 운전한
다. 목표 부상 공극에서 부상력을 내기 위한 기자력은 초전도 코일이 담당한다. 부상제어시스
템은 공극 센서와 제어기, 쵸퍼 회로로 구성된다. 제어기에 설정된 부상공극 값과 공극 센서
에 의해 검출된 값의 차이에 따라 제어 코일에 흐르는 DC전류를 제어함으로써 부상을 유지한
다[3].

Fig. 1 Levitation principle of Transrapid 07 Fig. 2 Operational principle of prototype SH-EM
2.2 부상전자석 설계
2.2.1 부상력 해석
전자석의 주요 설계 치수는 Table 1 과 같다. 철심 자극 단면적 및 피치는 각각 129 mm × 129 mm, 258 mm 로서, Transrapid07 의 상전도 전자석과 동일하게 하였다. 또한 추진
시스템과의 인터페이스를 고려하여 Transrapid07 과 동일한 궤도 형상을 적용하였다.
이상적인 U 형 전자석 모델에 있어서 부상력(흡인력)은 아래 식 (1), (2)와 같다. 여기서,
는 진공의 투자율, S는 전자석 극 단면적, 그리고 B는 궤도와 전자석 사이 공극에서의 평균
자속밀도이다. 공극 자속 밀도는 전자석 코일의 권수(N)와 운전전류(I)의 곱으로 나타나는 기
자력과 부상공극(z)의 크기에 따라 결정된다[4-5].
][0
2
NSBFm
= (1) ][20 TzNiB m
= (2)
그러나 실제 공극 자속밀도의 계산에는 코일 및 공극 주변에서의 누설자속과 철심에서의 자
속 포화를 고려해야 하며 또한 궤도의 슬롯 형상 때문에 공극에서의 자속밀도 분포는 일정하
지 않다. 따라서 Fig. 3과 같이 전자석 모델에 대한 FEM 해석으로 공극에서의 평균자속밀도를
추정하여 부상력을 계산하고, 해석 결과로부터 전자석의 요구 기자력 사양을 도출하였다.
Table 1 Dimensional specification of prototype SH-EM
Dimensional Parameters Dimension
Guideway (Thickness Ⅹ Width)
Slot size for LSM Cable
Size of pole face
Pole pitch
91.5 mm Ⅹ 129 mm
30 mm Ⅹ 28 mm Ⅹ 129 mm
129 mm Ⅹ 129 mm
258 mm

(a) 2-D Magnetic field distribution of electromagnet (b) Levitation force vs. mmf
Fig. 3 Levitation force analysis for SH-EM
2.2.2 전자석 설계 및 제작
전자석의 최대 설계 하중은 1.1kN로 하고, 20 mm의 부상 공극에서 운전 하는 것을 설계 목
표로 하였다. 공극센서의 최대 검지 공극을 고려하여 초기 정지 공극은 23 mm 로 설정하였다.
제어코일은 5 mm2의 구리권선을 양 극에 나누어 총 300 턴으로 설계하였다. 정지 상태에서 운
전 공극으로 부상시키기 위해 필요한 기자력은 제어코일로 발생시킨다. 운전공극에 도달하기
위한 제어코일의 단시간(2~3초) 운전전류는 최대 50 A로 제한하고 15 kA-T의 기동 기자력을
낼 수 있도록 하였다. 부상상태에서의 상시 제어전류는 2.5 A이내로 하였다.
Fig. 4는 초전도 코일의 설계 형상이다. 초전도 코일은 1세대 고온초전도체인 Bi-2223 선재를
사용하였으며, 직렬 연결된 4개의 더블 팬케익 코일로 설계하였다. 초전도 코일은 원통형 냉
각조 내에 설치되며, 액체질소로 냉각시켜 초전도 상태를 유지할 수 있도록 하였다. 초전도
코일의 권수는 냉각조의 최대 외경을 고려하여 각 코일당 90 턴씩, 총 360 턴으로 하였다. 제
작 완료한 전자석 시작품은 Fig. 5와 같다.
Fig. 4 Design of superconducting coil and cryostat Fig. 5 Fabrication of prototype SH-EM
2.3 시운전 평가
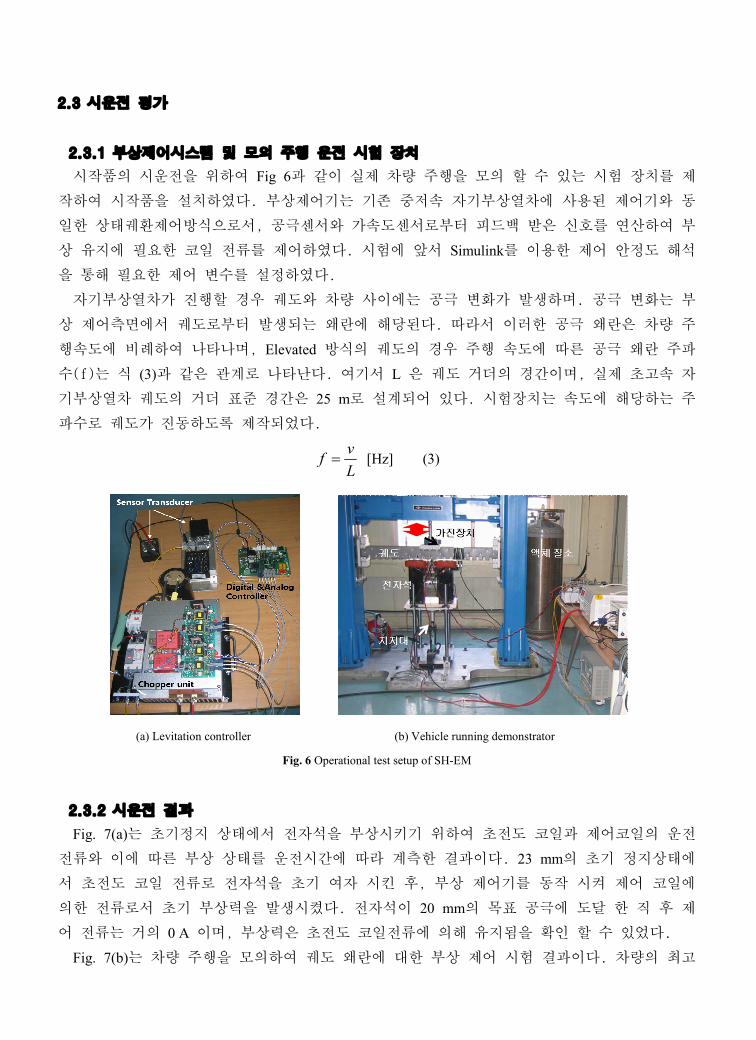
2.3.1 부상제어시스템 및 모의 주행 운전 시험 장치
시작품의 시운전을 위하여 Fig 6과 같이 실제 차량 주행을 모의 할 수 있는 시험 장치를 제
작하여 시작품을 설치하였다. 부상제어기는 기존 중저속 자기부상열차에 사용된 제어기와 동
일한 상태궤환제어방식으로서, 공극센서와 가속도센서로부터 피드백 받은 신호를 연산하여 부
상 유지에 필요한 코일 전류를 제어하였다. 시험에 앞서 Simulink를 이용한 제어 안정도 해석
을 통해 필요한 제어 변수를 설정하였다.
자기부상열차가 진행할 경우 궤도와 차량 사이에는 공극 변화가 발생하며. 공극 변화는 부
상 제어측면에서 궤도로부터 발생되는 왜란에 해당된다. 따라서 이러한 공극 왜란은 차량 주
행속도에 비례하여 나타나며, Elevated 방식의 궤도의 경우 주행 속도에 따른 공극 왜란 주파
수(f)는 식 (3)과 같은 관계로 나타난다. 여기서 L 은 궤도 거더의 경간이며, 실제 초고속 자
기부상열차 궤도의 거더 표준 경간은 25 m로 설계되어 있다. 시험장치는 속도에 해당하는 주
파수로 궤도가 진동하도록 제작되었다.
Lvf = [Hz] (3)
(a) Levitation controller (b) Vehicle running demonstrator
Fig. 6 Operational test setup of SH-EM
2.3.2 시운전 결과
Fig. 7(a)는 초기정지 상태에서 전자석을 부상시키기 위하여 초전도 코일과 제어코일의 운전
전류와 이에 따른 부상 상태를 운전시간에 따라 계측한 결과이다. 23 mm의 초기 정지상태에
서 초전도 코일 전류로 전자석을 초기 여자 시킨 후, 부상 제어기를 동작 시켜 제어 코일에
의한 전류로서 초기 부상력을 발생시켰다. 전자석이 20 mm의 목표 공극에 도달 한 직 후 제
어 전류는 거의 0 A 이며, 부상력은 초전도 코일전류에 의해 유지됨을 확인 할 수 있었다.
Fig. 7(b)는 차량 주행을 모의하여 궤도 왜란에 대한 부상 제어 시험 결과이다. 차량의 최고

주행 모의 속도를 500km/h로 가정하고, 속도에 해당하는 5.5 Hz의 주파수로 궤도를 진동시키
고 부상제어를 수행하였다. 실험 결과, 고속 주행 상태에서도 충분히 부상 제어가 가능함을
확인할 수 있었다. 다만, 제어 전류 변화에 따라 초전도 코일의 DC 운전 전류에도 영향을 주
기 때문에 향후 초전도 코일을 위한 전원장치에 대한 검토가 필요할 것으로 판단된다.
Fig. 7 Operating sequence to demonstrate initial levitation Fig. 8 Operation under the vehicle’s running conditions(500km/h)
3. 결 론
시운전 평가를 통하여 초고속 자기부상열차용으로 초전도 하이브리드 부상 시스템의 설계
및 운전 타당성을 확인 할 수 있었다. 그러나 실제 차량에 적용하기 위해서는 다극 구조의 전
자석 설계가 필요하며, 또한 초전도 코일을 지속적으로 운전하기 위한 냉각시스템에 대해서도
검토되어야만 할 것이다. 이는 후속 연구과제로 수행할 계획이다.
참고문헌
[1] James H. Lever (1998) Technical Assessment of Maglev System Concepts, Cold Regions Research &
Engineering Lab., US Army Corps of Engineers, Special Report 98-12. [2] G. Bohn and G. Steinmetz (1984) The Electromagnet Levitation and Guidance Technology of the
Transrapid Test Facility Emsland, IEEE Trans. on Magn. Mag-20(5), pp. 1666-1671. [3] S. Kalsi, M. Proise, T. Schultheiss and B. Dawkins (1995) Iron-core superconducting magnet design and
test results for maglev application, IEEE Trans.on Appl. Supercond., 5(2) pp. 964–967 [4] P.K.Sinha (1987) Electromagnetic Suspension-Dynamics&Control. Peter Peregrinus Ltd., London, Ch. 4. [5] Roger Goodall (2008) Generalized design models for EMS maglev, Proc.20th Conf. Magnetically
Levitated Systems and Linear Drives, San Diego, No. 007.





























