Embed Size (px)
Citation preview
1
AUTOMOBILSKI MEHATRONIČKI SUSTAVIOvjes automobila
Joško Petrić
Šk. god. 2018/19.
Uvod
• Ovjes: engl. Suspension, njem. Radaufhängung, Federung ili Vertikaldynamik
• Opružno i prigušno (amortizirajuće) djelovanje ovjesa automobila djeluje uglavnom
na njegovo vertikalno gibanje.
• Ovjes povezuje vozilo (putnički i prtljažni prostor, pogon i prijenos) s kotačima i
podlogom.
• Podvozje – elementi i sklopovi preko kojih vozilo ostvaruje kontakt s cestom (kotači,
vodilice kotača, opruge, amortizeri, poprečni stabilizatori, upravljački sustav i radna
kočnica. (Nap.: osobna vozila imaju samonosivu karoseriju, nemaju šasiju te
podvozje općenito nije dio šasije.
Uvod
Zadaci ovjesa:
• Osigurati kontinuirani kontakt kotača i podloge bez obzira na uvjete
• Osigurati sigurnost i udobnost
• Voditi kotače sa što manjim otporom i trošenjem guma
• Smanjiti buku i vibracije
Uvod
3 kriterija ocjene ovjesa: udobnost – „držanje” ceste – nošenje tereta
• Udobnost - opterećenje putnika i tereta njihanjem, „izolacija” vibracija
• Držanje ceste - raspodjela sila prema cesti kako se mijenjaju faktoriopterećenja kotača
• Nošenje tereta zahtijeva tvrđi ovjes radi manje osjetljivosti na promjene težine.
Ta svojstva su u velikoj mjeri suprostavljena, a osim toga potrebno je voditiračuna i o cijeni, ugradbenom prostoru, eventualno potrošnji energije (za aktivneovjese).
Elementi i koncepcije sustava ovjesa
Osnovni elementi sustava ovjesa su vodilice kotača, opruge, prigušivači
(amortizeri) i stabilizatori.
• Vodilice kotača – spone, ostvaruju spoj kotača sa karoserijom, te prenose statičke i dinamičke sile.
• Stabilizatori - spajaju lijevi i desni kotač utječući na naginjanje vozila (anti-roll bar), te na ponašanje u zavoju (podupravljanje ili predupravljanje).
• Opruge
• Prigušivači (amortizeri)
Koncepcije sustava ovjesa
Koncepcije sustava ovjesa kotača:
• Krute osovine
• Polukrute osovine
• Nezavisni ovjes
2
Koncepcije sustava ovjesa
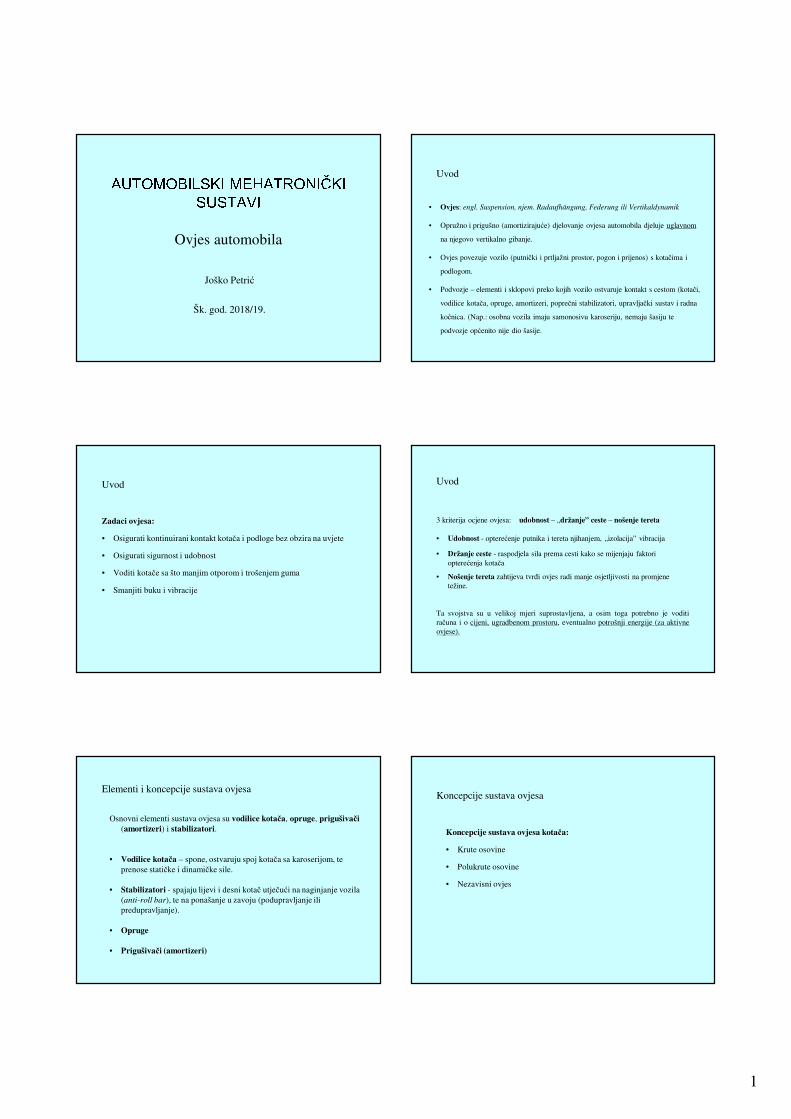
Krute osovine: spajaju lijevi i desni kotač, a vezana je s karoserijom preko opruga. Progibom jednog kotača cijela osovina se naginje, pa se mijenja nagib oba kotača.
S lisnatim oprugama:
Nap.: često je kod starijih vozila i dijela
gospodarskih vozila u jednom kućištu
diferencijal i poluvratila (pogonski most)
te su povezani s karoserijom pomoću
lisnatih opruga.
Velike su neovješene mase,
što je loše za udobnost i sigurnost.
Koncepcije sustava ovjesa
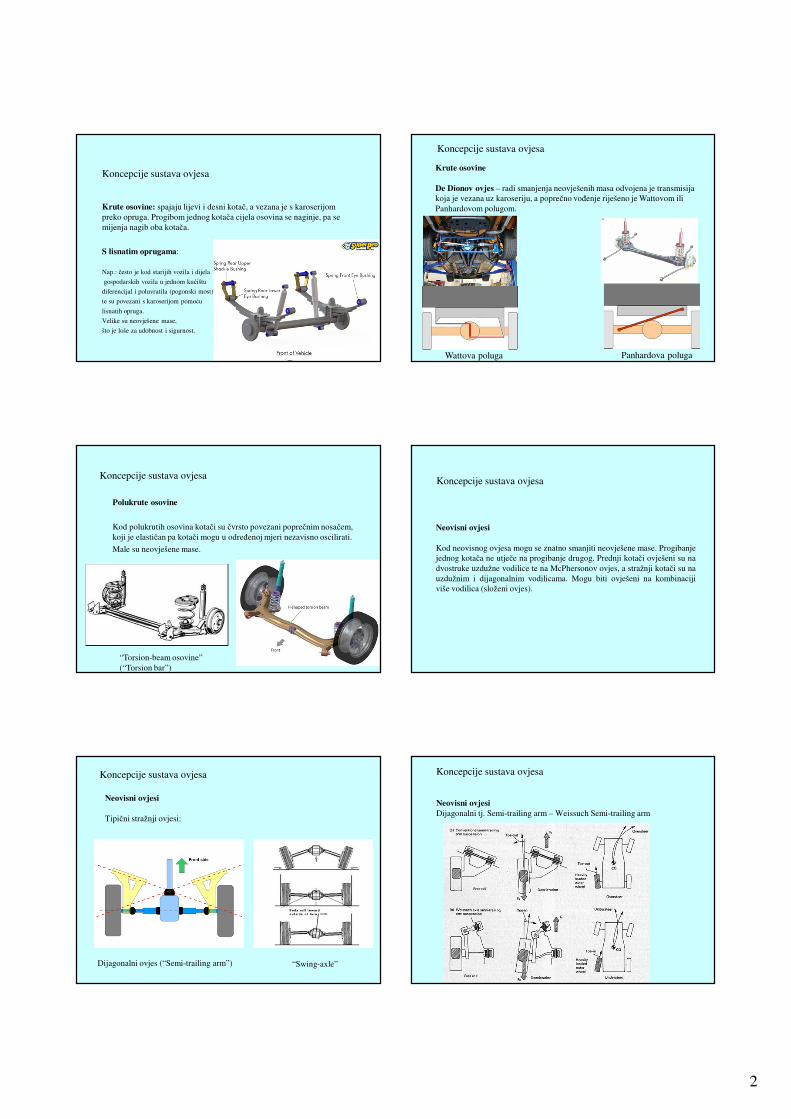
Panhardova polugaWattova poluga
Krute osovine
De Dionov ovjes – radi smanjenja neovješenih masa odvojena je transmisija koja je vezana uz karoseriju, a poprečno vođenje riješeno je Wattovom ili Panhardovom polugom.
Koncepcije sustava ovjesa
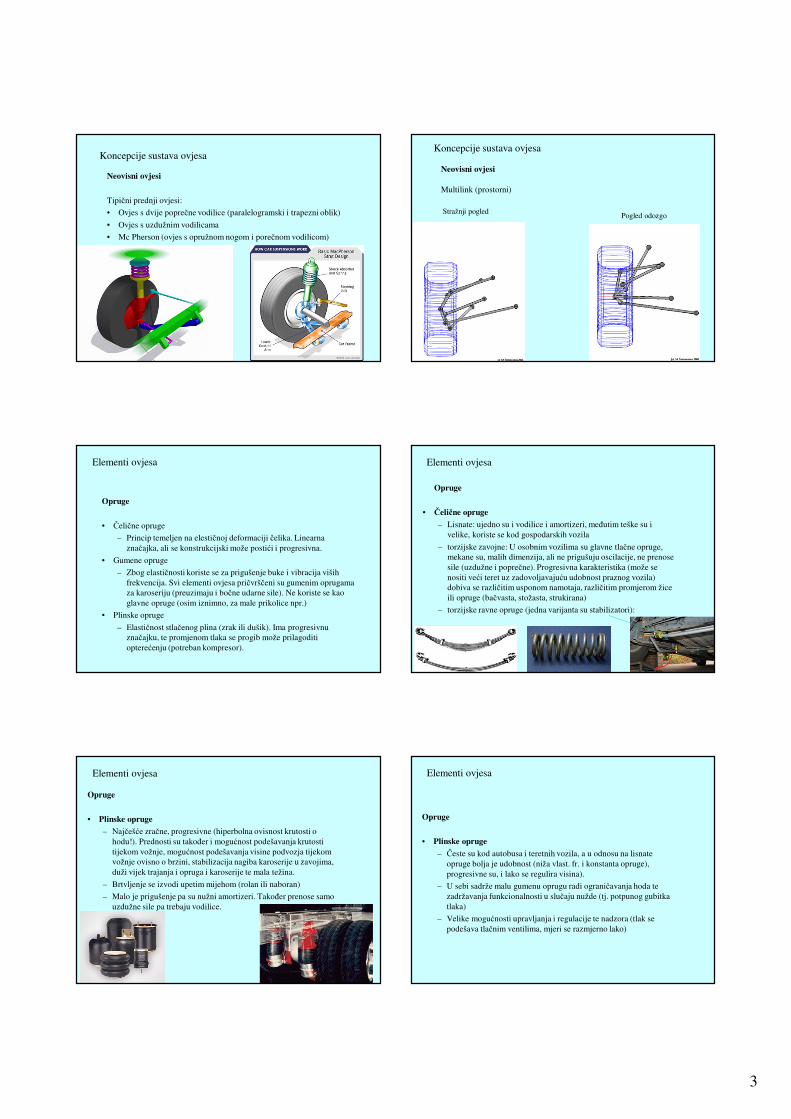
Polukrute osovine
Kod polukrutih osovina kotači su čvrsto povezani poprečnim nosačem, koji je elastičan pa kotači mogu u određenoj mjeri nezavisno oscilirati.
Male su neovješene mase.
“Torsion-beam osovine” (“Torsion bar”)
Koncepcije sustava ovjesa
Neovisni ovjesi
Kod neovisnog ovjesa mogu se znatno smanjiti neovješene mase. Progibanjejednog kotača ne utječe na progibanje drugog. Prednji kotači ovješeni su nadvostruke uzdužne vodilice te na McPhersonov ovjes, a stražnji kotači su nauzdužnim i dijagonalnim vodilicama. Mogu biti ovješeni na kombinacijiviše vodilica (složeni ovjes).
Koncepcije sustava ovjesa
Neovisni ovjesi
Tipični stražnji ovjesi:
“Swing-axle”Dijagonalni ovjes (“Semi-trailing arm”)
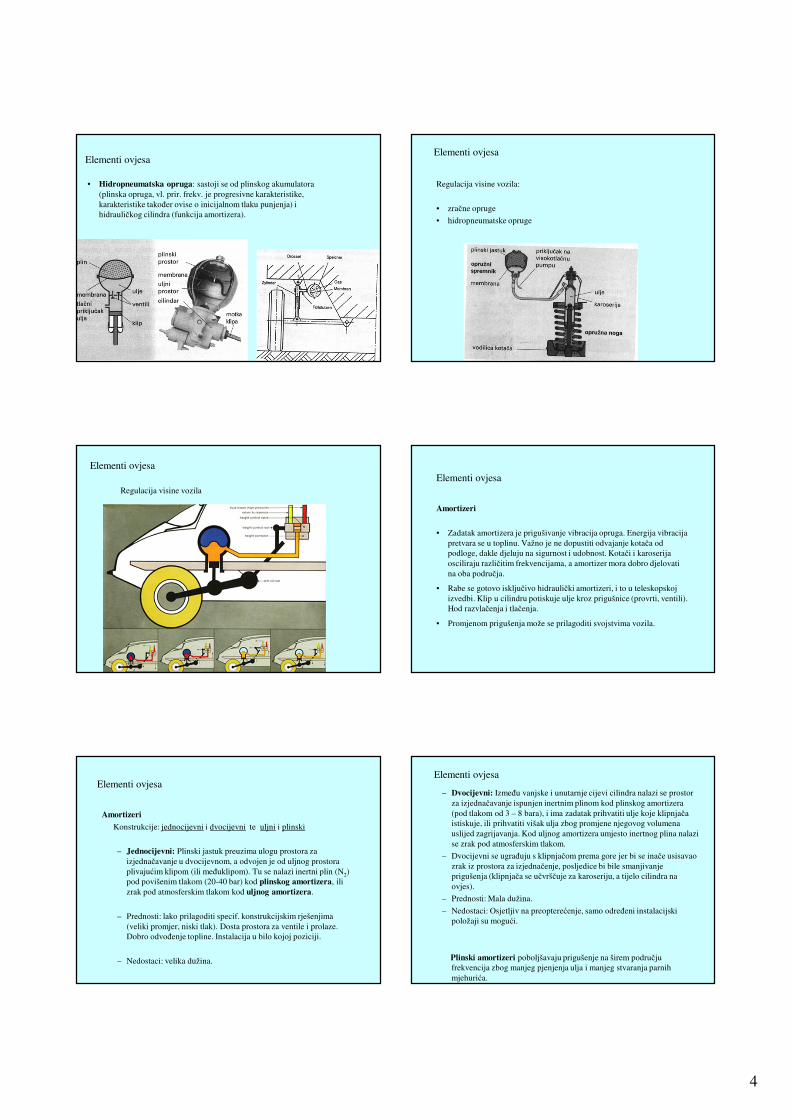
Koncepcije sustava ovjesa
Neovisni ovjesi
Dijagonalni tj. Semi-trailing arm – Weissuch Semi-trailing arm
3
Koncepcije sustava ovjesa
Neovisni ovjesi
Tipični prednji ovjesi:
• Ovjes s dvije poprečne vodilice (paralelogramski i trapezni oblik)
• Ovjes s uzdužnim vodilicama
• Mc Pherson (ovjes s opružnom nogom i porečnom vodilicom)
Koncepcije sustava ovjesa
Stražnji pogledPogled odozgo
Neovisni ovjesi
Multilink (prostorni)
Elementi ovjesa
Opruge
• Čelične opruge
– Princip temeljen na elestičnoj deformaciji čelika. Linearna značajka, ali se konstrukcijski može postići i progresivna.
• Gumene opruge
– Zbog elastičnosti koriste se za prigušenje buke i vibracija viših frekvencija. Svi elementi ovjesa pričvrščeni su gumenim oprugama za karoseriju (preuzimaju i bočne udarne sile). Ne koriste se kao glavne opruge (osim iznimno, za male prikolice npr.)
• Plinske opruge
– Elastičnost stlačenog plina (zrak ili dušik). Ima progresivnu značajku, te promjenom tlaka se progib može prilagoditi opterećenju (potreban kompresor).
Elementi ovjesa
Opruge
• Čelične opruge
– Lisnate: ujedno su i vodilice i amortizeri, međutim teške su i velike, koriste se kod gospodarskih vozila
– torzijske zavojne: U osobnim vozilima su glavne tlačne opruge, mekane su, malih dimenzija, ali ne prigušuju oscilacije, ne prenose sile (uzdužne i poprečne). Progresivna karakteristika (može se nositi veći teret uz zadovoljavajuću udobnost praznog vozila) dobiva se različitim usponom namotaja, različitim promjerom žice ili opruge (bačvasta, stožasta, strukirana)
– torzijske ravne opruge (jedna varijanta su stabilizatori):
Elementi ovjesa
Opruge
• Plinske opruge
– Najčešće zračne, progresivne (hiperbolna ovisnost krutosti o hodu!). Prednosti su također i mogućnost podešavanja krutosti tijekom vožnje, mogućnost podešavanja visine podvozja tijekom vožnje ovisno o brzini, stabilizacija nagiba karoserije u zavojima, duži vijek trajanja i opruga i karoserije te mala težina.
– Brtvljenje se izvodi upetim mijehom (rolan ili naboran)
– Malo je prigušenje pa su nužni amortizeri. Također prenose samo uzdužne sile pa trebaju vodilice.
Elementi ovjesa
Opruge
• Plinske opruge
– Česte su kod autobusa i teretnih vozila, a u odnosu na lisnate opruge bolja je udobnost (niža vlast. fr. i konstanta opruge), progresivne su, i lako se regulira visina).
– U sebi sadrže malu gumenu oprugu radi ograničavanja hoda te zadržavanja funkcionalnosti u slučaju nužde (tj. potpunog gubitka tlaka)
– Velike mogućnosti upravljanja i regulacije te nadzora (tlak se podešava tlačnim ventilima, mjeri se razmjerno lako)
4
Elementi ovjesa
• Hidropneumatska opruga: sastoji se od plinskog akumulatora (plinska opruga, vl. prir. frekv. je progresivne karakteristike,karakteristike također ovise o inicijalnom tlaku punjenja) i hidrauličkog cilindra (funkcija amortizera).
Elementi ovjesa
Regulacija visine vozila:
• zračne opruge
• hidropneumatske opruge
Elementi ovjesa
Regulacija visine vozila
Elementi ovjesa
Amortizeri
• Zadatak amortizera je prigušivanje vibracija opruga. Energija vibracija pretvara se u toplinu. Važno je ne dopustiti odvajanje kotača od podloge, dakle djeluju na sigurnost i udobnost. Kotači i karoserija osciliraju različitim frekvencijama, a amortizer mora dobro djelovati na oba područja.
• Rabe se gotovo isključivo hidraulički amortizeri, i to u teleskopskoj izvedbi. Klip u cilindru potiskuje ulje kroz prigušnice (provrti, ventili). Hod razvlačenja i tlačenja.
• Promjenom prigušenja može se prilagoditi svojstvima vozila.
Elementi ovjesa
Amortizeri
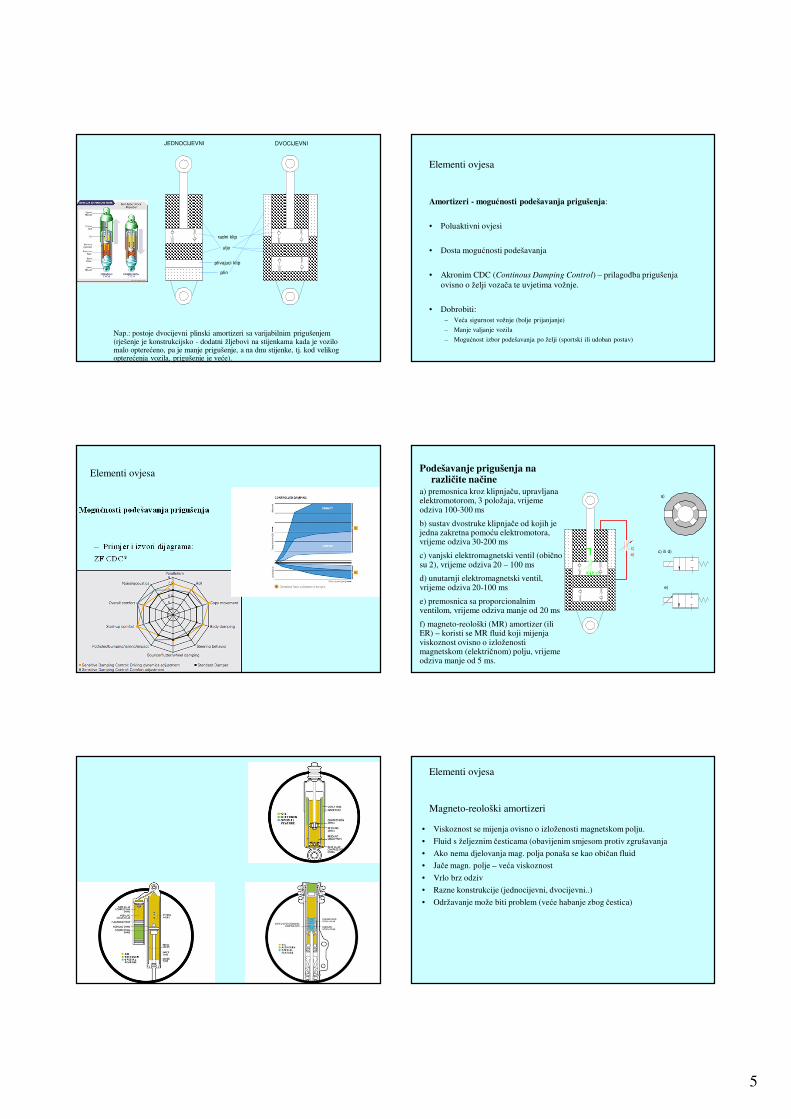
Konstrukcije: jednocijevni i dvocijevni te uljni i plinski
– Jednocijevni: Plinski jastuk preuzima ulogu prostora za izjednačavanje u dvocijevnom, a odvojen je od uljnog prostora plivajućim klipom (ili međuklipom). Tu se nalazi inertni plin (N2) pod povišenim tlakom (20-40 bar) kod plinskog amortizera, ili zrak pod atmosferskim tlakom kod uljnog amortizera.
– Prednosti: lako prilagoditi specif. konstrukcijskim rješenjima (veliki promjer, niski tlak). Dosta prostora za ventile i prolaze. Dobro odvođenje topline. Instalacija u bilo kojoj poziciji.
– Nedostaci: velika dužina.
Elementi ovjesa
– Dvocijevni: Između vanjske i unutarnje cijevi cilindra nalazi se prostor za izjednačavanje ispunjen inertnim plinom kod plinskog amortizera (pod tlakom od 3 – 8 bara), i ima zadatak prihvatiti ulje koje klipnjača istiskuje, ili prihvatiti višak ulja zbog promjene njegovog volumena uslijed zagrijavanja. Kod uljnog amortizera umjesto inertnog plina nalazi se zrak pod atmosferskim tlakom.
– Dvocijevni se ugrađuju s klipnjačom prema gore jer bi se inače usisavao zrak iz prostora za izjednačenje, posljedice bi bile smanjivanje prigušenja (klipnjača se učvrščuje za karoseriju, a tijelo cilindra na ovjes).
– Prednosti: Mala dužina.
– Nedostaci: Osjetljiv na preopterećenje, samo određeni instalacijski položaji su mogući.
Plinski amortizeri poboljšavaju prigušenje na širem području frekvencija zbog manjeg pjenjenja ulja i manjeg stvaranja parnih mjehurića.
5
Nap.: postoje dvocijevni plinski amortizeri sa varijabilnim prigušenjem (rješenje je konstrukcijsko - dodatni žljebovi na stijenkama kada je vozilo malo opterećeno, pa je manje prigušenje, a na dnu stijenke, tj. kod velikog opterećenja vozila, prigušenje je veće).
ulje
plin
plivajuci klip
radni klip
JEDNOCIJEVNI DVOCIJEVNI
Elementi ovjesa
Amortizeri - mogućnosti podešavanja prigušenja:
• Poluaktivni ovjesi
• Dosta mogućnosti podešavanja
• Akronim CDC (Continous Damping Control) – prilagodba prigušenja ovisno o želji vozača te uvjetima vožnje.
• Dobrobiti: – Veća sigurnost vožnje (bolje prijanjanje)
– Manje valjanje vozila
– Mogućnost izbor podešavanja po želji (sportski ili udoban postav)
Elementi ovjesa
Mogućnosti podešavanja prigušenja
– Primjer i izvori dijagrama:
ZF CDC®
Podešavanje prigušenja na različite načine
a) premosnica kroz klipnjaču, upravljana elektromotorom, 3 položaja, vrijeme odziva 100-300 ms
b) sustav dvostruke klipnjače od kojih je jedna zakretna pomoću elektromotora, vrijeme odziva 30-200 ms
c) vanjski elektromagnetski ventil (obično su 2), vrijeme odziva 20 – 100 ms
d) unutarnji elektromagnetski ventil, vrijeme odziva 20-100 ms
e) premosnica sa proporcionalnim ventilom, vrijeme odziva manje od 20 ms
f) magneto-reološki (MR) amortizer (ili ER) – koristi se MR fluid koji mijenja viskoznost ovisno o izloženosti magnetskom (električnom) polju, vrijeme odziva manje od 5 ms.
c) ili d)
e)
b)a) d)
c)
e)
a)
Elementi ovjesa
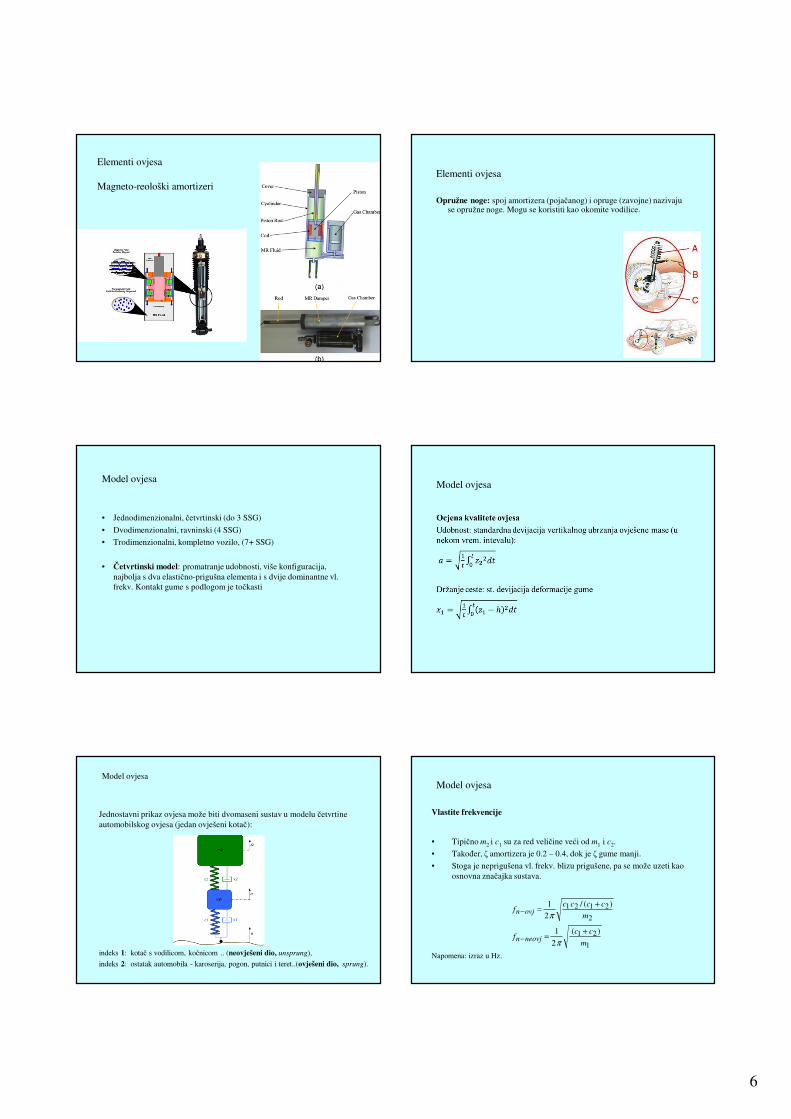
Magneto-reološki amortizeri
• Viskoznost se mijenja ovisno o izloženosti magnetskom polju.
• Fluid s željeznim česticama (obavijenim smjesom protiv zgrušavanja
• Ako nema djelovanja mag. polja ponaša se kao običan fluid
• Jače magn. polje – veća viskoznost
• Vrlo brz odziv
• Razne konstrukcije (jednocijevni, dvocijevni..)
• Održavanje može biti problem (veće habanje zbog čestica)
6
Elementi ovjesa
Magneto-reološki amortizeriElementi ovjesa
Opružne noge: spoj amortizera (pojačanog) i opruge (zavojne) nazivaju se opružne noge. Mogu se koristiti kao okomite vodilice.
Model ovjesa
• Jednodimenzionalni, četvrtinski (do 3 SSG)
• Dvodimenzionalni, ravninski (4 SSG)
• Trodimenzionalni, kompletno vozilo, (7+ SSG)
• Četvrtinski model: promatranje udobnosti, više konfiguracija, najbolja s dva elastično-prigušna elementa i s dvije dominantne vl. frekv. Kontakt gume s podlogom je točkasti
Model ovjesa
Model ovjesa
Jednostavni prikaz ovjesa može biti dvomaseni sustav u modelu četvrtineautomobilskog ovjesa (jedan ovješeni kotač):
indeks 1: kotač s vodilicom, kočnicom .. (neovješeni dio, unsprung),
indeks 2: ostatak automobila - karoserija, pogon, putnici i teret..(ovješeni dio, sprung).
Model ovjesa
Vlastite frekvencije
• Tipično m2 i c1 su za red veličine veći od m1 i c2.
• Također, ζ amortizera je 0.2 – 0.4, dok je ζ gume manji.
• Stoga je neprigušena vl. frekv. blizu prigušene, pa se može uzeti kaoosnovna značajka sustava.
Napomena: izraz u Hz.1
21
2
2121
)(
2
1
)(/
2
1
m
ccf
m
ccccf
neovjn
ovjn
+=
+=
−
−
π
π
7
Model ovjesa Model ovjesa
Model ovjesa
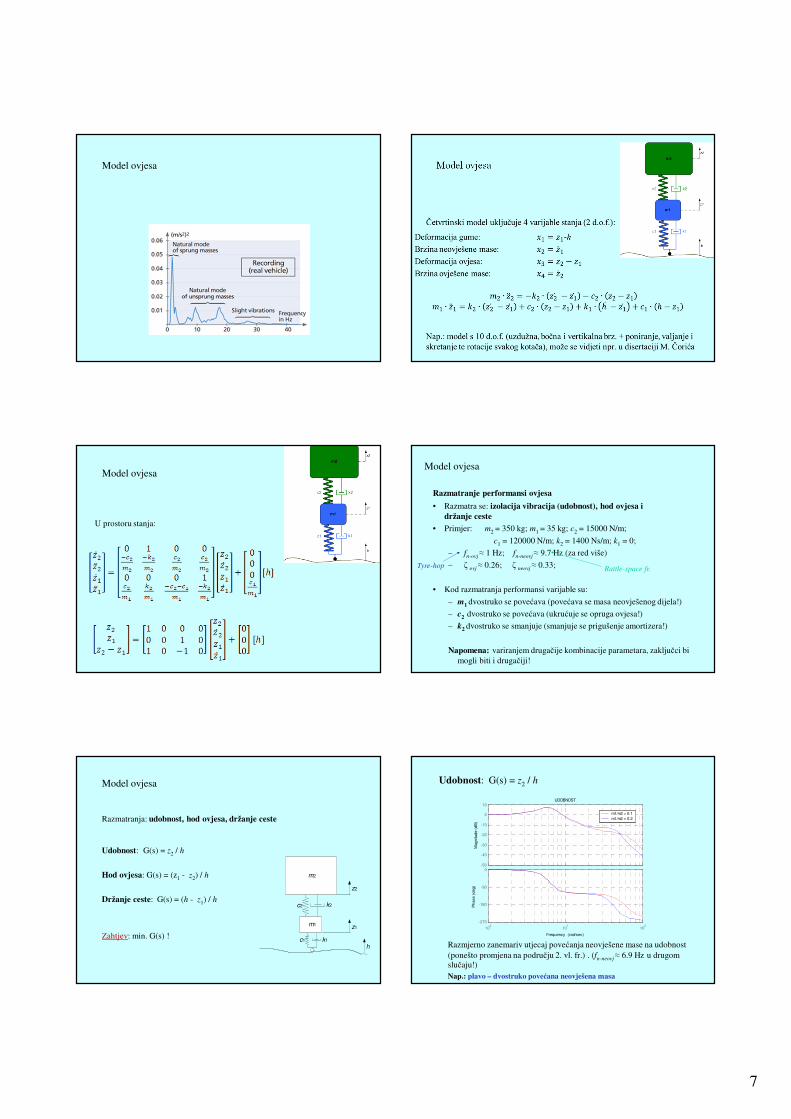
U prostoru stanja:
Model ovjesa
Razmatranje performansi ovjesa
• Razmatra se: izolacija vibracija (udobnost), hod ovjesa i
držanje ceste
• Primjer: m2 = 350 kg; m1 = 35 kg; c2 = 15000 N/m;
c1 = 120000 N/m; k2 = 1400 Ns/m; k1 = 0;
– fn-ovj≈ 1 Hz; fn-neovj≈ 9.7 Hz (za red više)
– ζ ovj ≈ 0.26; ζ neovj≈ 0.33;
• Kod razmatranja performansi varijable su:
– m1 dvostruko se povećava (povećava se masa neovješenog dijela!)
– c2 dvostruko se povećava (ukrućuje se opruga ovjesa!)
– k2 dvostruko se smanjuje (smanjuje se prigušenje amortizera!)
Napomena: variranjem drugačije kombinacije parametara, zaključci bi mogli biti i drugačiji!
Tyre-hop Rattle-space fr.
Model ovjesa
Razmatranja: udobnost, hod ovjesa, držanje ceste
Udobnost: G(s) = z2 / h
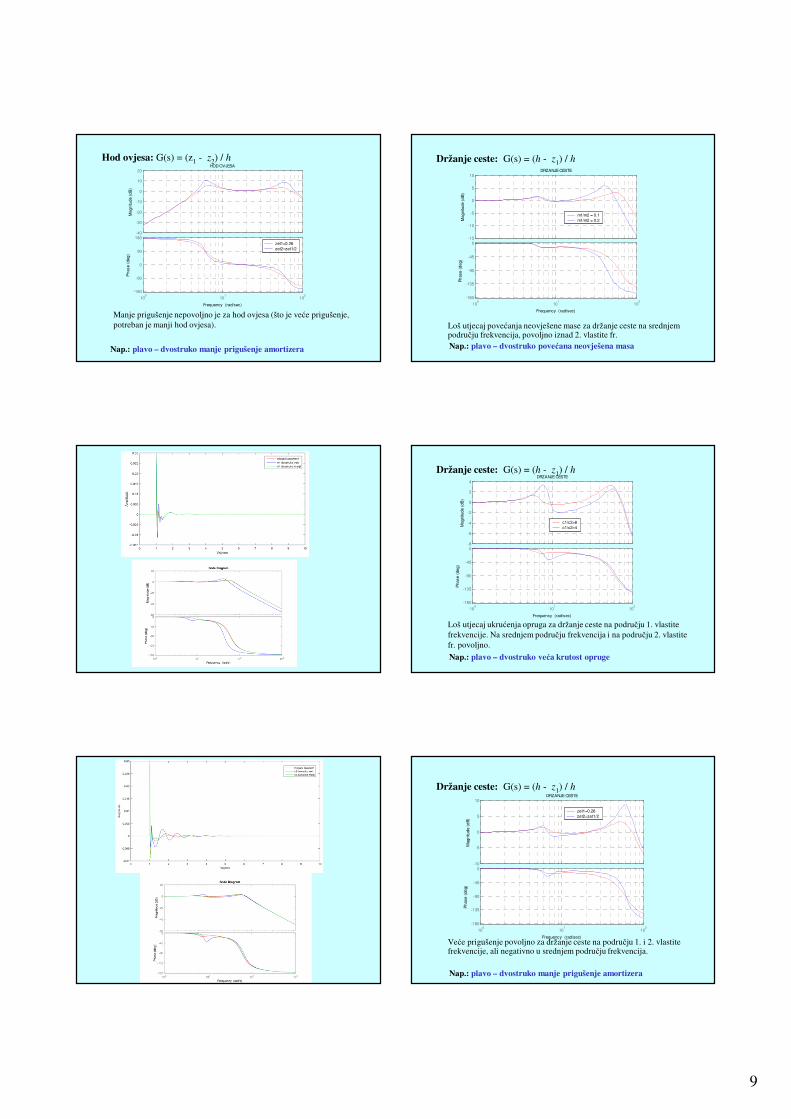
Hod ovjesa: G(s) = (z1 - z2) / h
Držanje ceste: G(s) = (h - z1) / h
Zahtjev: min. G(s) !h
z1
z2
m2
m1
c2
c1 k1
k2
Udobnost: G(s) = z2 / h
Razmjerno zanemariv utjecaj povećanja neovješene mase na udobnost (ponešto promjena na području 2. vl. fr.) . (fn-neovj≈ 6.9 Hz u drugom slučaju!)Nap.: plavo – dvostruko povećana neovješena masa
-50
-40
-30
-20
-10
0
10
Mag
nitu
de (
dB
)
100
101
102
-270
-180
-90
0
Ph
ase
(d
eg
)
m1/m2 = 0.1
m1/m2 = 0.2
UDOBNOST
Frequency (rad/sec)
8
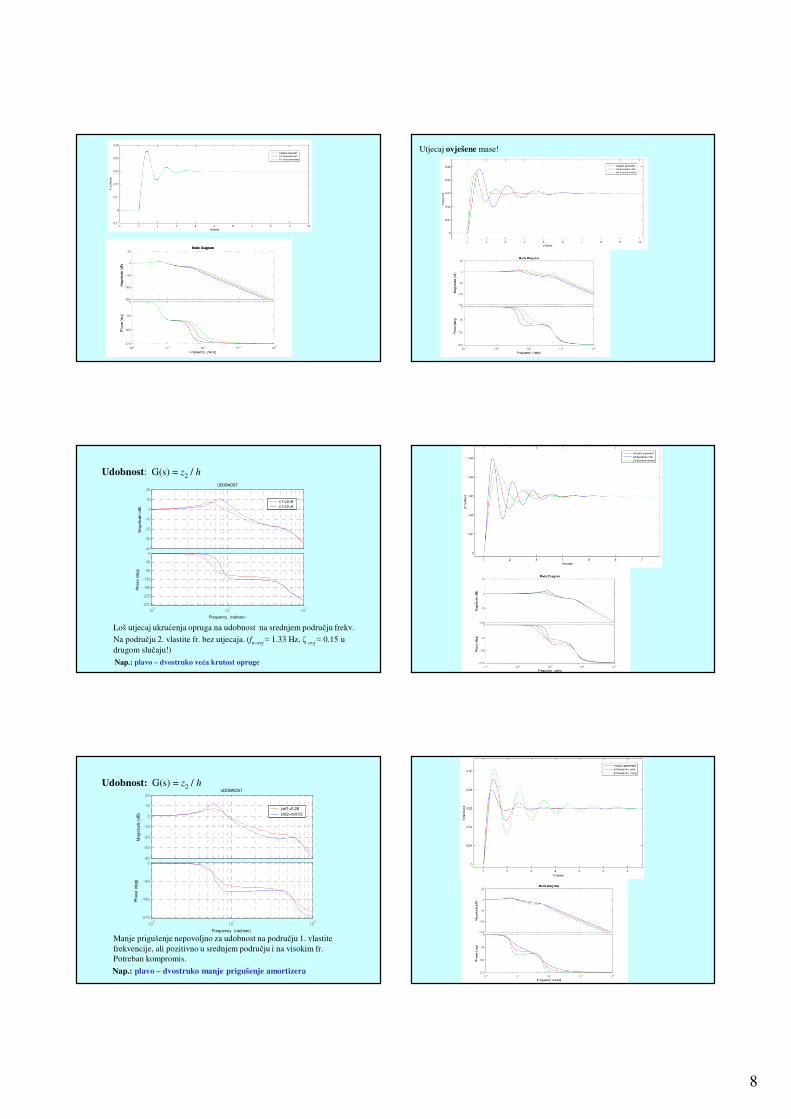
Utjecaj ovješene mase!
Udobnost: G(s) = z2 / h
Loš utjecaj ukrućenja opruga na udobnost na srednjem području frekv.
Na području 2. vlastite fr. bez utjecaja. (fn-ovj≈ 1.33 Hz, ζ ovj ≈ 0.15 u drugom slučaju!)
Nap.: plavo – dvostruko veća krutost opruge
-40
-30
-20
-10
0
10
20
Mag
nitu
de
(d
B)
100
101
102
-270
-225
-180
-135
-90
-45
0
Ph
ase
(deg
)
c1/c2=8
c1/c2=4
UDOBNOST
Frequency (rad/sec)
Udobnost: G(s) = z2 / h
Manje prigušenje nepovoljno za udobnost na području 1. vlastite frekvencije, ali pozitivno u srednjem području i na visokim fr. Potreban kompromis.
Nap.: plavo – dvostruko manje prigušenje amortizera
-40
-30
-20
-10
0
10
20
Magn
itude
(d
B)
100
101
102
-270
-180
-90
0
Ph
ase
(d
eg)
zet1=0.26
zet2=zet1/2
UDOBNOST
Frequency (rad/sec)
9
Hod ovjesa: G(s) = (z1 - z2) / h
Manje prigušenje nepovoljno je za hod ovjesa (što je veće prigušenje, potreban je manji hod ovjesa).
Nap.: plavo – dvostruko manje prigušenje amortizera
-40
-30
-20
-10
0
10
20
Magn
itud
e (
dB
)
100
101
102
-180
-90
0
90
180
Phase (
deg)
zet1=0.26
zet2=zet1/2
HOD OVJESA
Frequency (rad/sec)
Držanje ceste: G(s) = (h - z1) / h
Loš utjecaj povećanja neovješene mase za držanje ceste na srednjem području frekvencija, povoljno iznad 2. vlastite fr.Nap.: plavo – dvostruko povećana neovješena masa
-15
-10
-5
0
5
10
Magn
itude
(d
B)
100
101
102
-180
-135
-90
-45
0
Ph
ase
(d
eg)
m1/m2 = 0.1
m1/m2 = 0.2
DRZANJE CESTE
Frequency (rad/sec)
Držanje ceste: G(s) = (h - z1) / h
Loš utjecaj ukrućenja opruga za držanje ceste na području 1. vlastite frekvencije. Na srednjem području frekvencija i na području 2. vlastite fr. povoljno.
Nap.: plavo – dvostruko veća krutost opruge
-8
-6
-4
-2
0
2
4
Magn
itud
e (
dB
)
100
101
102
-180
-135
-90
-45
0
Phase (
deg)
c1/c2=8
c1/c2=4
DRZANJE CESTE
Frequency (rad/sec)
Držanje ceste: G(s) = (h - z1) / h
Veće prigušenje povoljno za držanje ceste na području 1. i 2. vlastite frekvencije, ali negativno u srednjem području frekvencija.
Nap.: plavo – dvostruko manje prigušenje amortizera
-10
-5
0
5
10
Mag
nitu
de (
dB
)
100
101
102
-180
-135
-90
-45
0
Ph
ase
(de
g)
zet1=0.26
zet2=zet1/2
DRZANJE CESTE
Frequency (rad/sec)
10
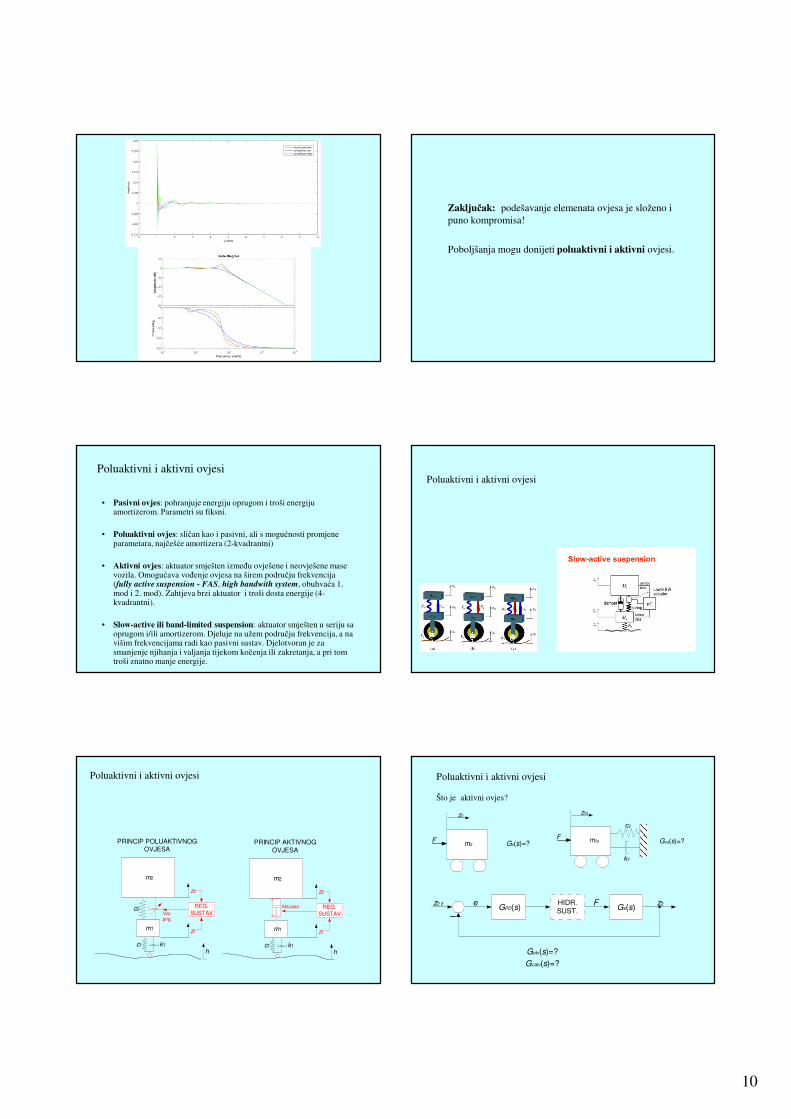
Zaključak: podešavanje elemenata ovjesa je složeno i puno kompromisa!
Poboljšanja mogu donijeti poluaktivni i aktivni ovjesi.
Poluaktivni i aktivni ovjesi
• Pasivni ovjes: pohranjuje energiju oprugom i troši energiju amortizerom. Parametri su fiksni.
• Poluaktivni ovjes: sličan kao i pasivni, ali s mogućnosti promjene parametara, najčešće amortizera (2-kvadrantni)
• Aktivni ovjes: aktuator smješten između ovješene i neovješene mase vozila. Omogućava vođenje ovjesa na širem području frekvencija (fully active suspension - FAS, high bandwith system, obuhvaća 1. mod i 2. mod). Zahtjeva brzi aktuator i troši dosta energije (4-kvadrantni).
• Slow-active ili band-limited suspension: aktuator smješten u seriju sa oprugom i/ili amortizerom. Djeluje na užem području frekvencija, a na višim frekvencijama radi kao pasivni sustav. Djelotvoran je za smanjenje njihanja i valjanja tijekom kočenja ili zakretanja, a pri tom troši znatno manje energije.
Poluaktivni i aktivni ovjesi
Poluaktivni i aktivni ovjesi
h
z1
z2
m2
m1
c2
c1 k1
REG.
SUSTAV
PRINCIP POLUAKTIVNOGOVJESA
h
z1
z2
m2
m1
c1 k1
REG.
SUSTAV
PRINCIP AKTIVNOG
OVJESA
Var.prig.
Aktuator
F
z2
m2 Gs(s)=?F
z2a
m2a Gsa(s)=?
c2
k2
HIDR.SUST. Gs(s)GPD(s)
Fe z2z2 ž
Gzatv(s)=?
Gotv(s)=?
Poluaktivni i aktivni ovjesi
Što je aktivni ovjes?
11
Poluaktivni i aktivni ovjesi
Vrste aktivnog ovjesa:
SV
Poluaktivni i aktivni ovjesi
Jedna druga klasifikacija:
Dakle: i u aktivnom ovjesu u principu imamo elemente pasivnog ovjesa, a da li je on SB ili HB prvenstveno će ovisiti o mogućnostima aktuatora i povezanog kontrolnog sustava. Bitni su ciljevi ovjesa!
Poluaktivni i aktivni ovjesi
„Skyhook” princip vođenja aktivnog ovjesa
=
Poluaktivni i aktivni ovjesi
„Skyhook” princip vođenja aktivnog ovjesa
Poluaktivni i aktivni ovjesi
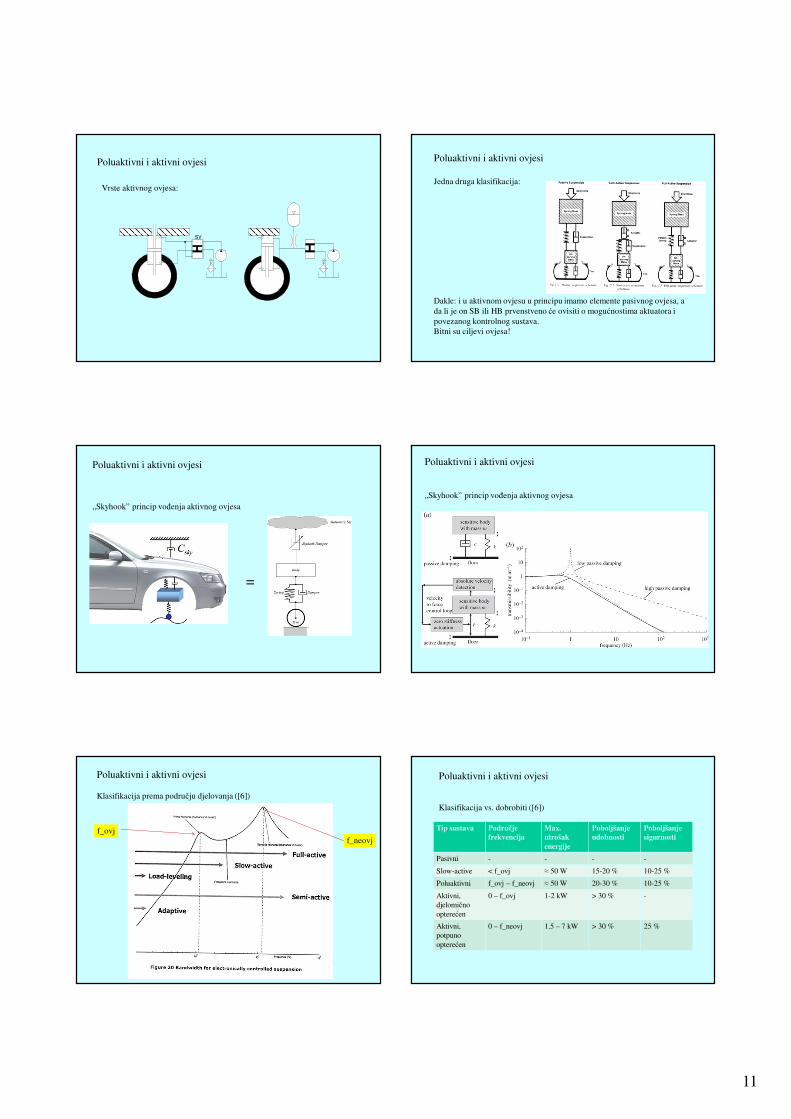
Klasifikacija prema području djelovanja ([6])
f_ovjf_neovj
Poluaktivni i aktivni ovjesi
Klasifikacija vs. dobrobiti ([6])
Tip sustava Područje
frekvencija
Max.
utrošak
energije
Poboljšanje
udobnosti
Poboljšanje
sigurnosti
Pasivni - - - -
Slow-active < f_ovj ≈ 50 W 15-20 % 10-25 %
Poluaktivni f_ovj – f_neovj ≈ 50 W 20-30 % 10-25 %
Aktivni, djelomično opterećen
0 – f_ovj 1-2 kW > 30 % -
Aktivni,potpunoopterećen
0 – f_neovj 1.5 – 7 kW > 30 % 25 %
12
Poluaktivni i aktivni ovjesi
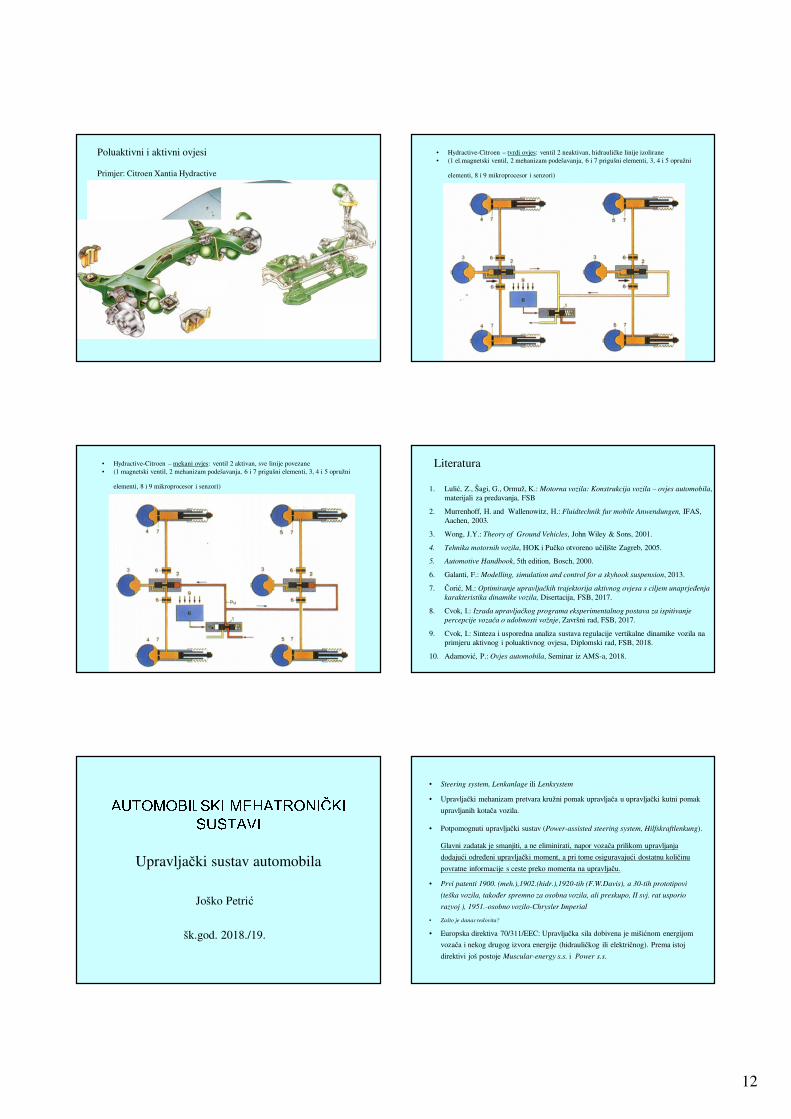
Primjer: Citroen Xantia Hydractive
• Hydractive-Citroen – tvrdi ovjes: ventil 2 neaktivan, hidrauličke linije izolirane • (1 el.magnetski ventil, 2 mehanizam podešavanja, 6 i 7 prigušni elementi, 3, 4 i 5 opružni
elementi, 8 i 9 mikroprocesor i senzori)
• Hydractive-Citroen – mekani ovjes: ventil 2 aktivan, sve linije povezane • (1 magnetski ventil, 2 mehanizam podešavanja, 6 i 7 prigušni elementi, 3, 4 i 5 opružni
elementi, 8 i 9 mikroprocesor i senzori)
Literatura
1. Lulić, Z., Šagi, G., Ormuž, K.: Motorna vozila: Konstrukcija vozila – ovjes automobila, materijali za predavanja, FSB
2. Murrenhoff, H. and Wallenowitz, H.: Fluidtechnik fur mobile Anwendungen, IFAS, Aachen, 2003.
3. Wong, J.Y.: Theory of Ground Vehicles, John Wiley & Sons, 2001.
4. Tehnika motornih vozila, HOK i Pučko otvoreno učilište Zagreb, 2005.
5. Automotive Handbook, 5th edition, Bosch, 2000.
6. Galanti, F.: Modelling, simulation and control for a skyhook suspension, 2013.
7. Čorić, M.: Optimiranje upravljačkih trajektorija aktivnog ovjesa s ciljem unaprjeđenja
karakteristika dinamike vozila, Disertacija, FSB, 2017.
8. Cvok, I.: Izrada upravljačkog programa eksperimentalnog postava za ispitivanje
percepcije vozača o udobnosti vožnje, Završni rad, FSB, 2017.
9. Cvok, I.: Sinteza i usporedna analiza sustava regulacije vertikalne dinamike vozila na primjeru aktivnog i poluaktivnog ovjesa, Diplomski rad, FSB, 2018.
10. Adamović, P.: Ovjes automobila, Seminar iz AMS-a, 2018.
AUTOMOBILSKI MEHATRONIČKISUSTAVIUpravljački sustav automobila
Joško Petrić
šk.god. 2018./19.
• Steering system, Lenkanlage ili Lenksystem
• Upravljački mehanizam pretvara kružni pomak upravljača u upravljački kutni pomak
upravljanih kotača vozila.
• Potpomognuti upravljački sustav (Power-assisted steering system, Hilfskraftlenkung).
Glavni zadatak je smanjiti, a ne eliminirati, napor vozača prilikom upravljanja
dodajući određeni upravljački moment, a pri tome osiguravajući dostatnu količinu
povratne informacije s ceste preko momenta na upravljaču.
• Prvi patenti 1900. (meh.),1902.(hidr.),1920-tih (F.W.Davis), a 30-tih prototipovi
(teška vozila, također spremno za osobna vozila, ali preskupo, II svj. rat usporio
razvoj ), 1951.-osobno vozilo-Chrysler Imperial
• Zašto je danas redovita?
• Europska direktiva 70/311/EEC: Upravljačka sila dobivena je mišićnom energijom
vozača i nekog drugog izvora energije (hidrauličkog ili električnog). Prema istoj
direktivi još postoje Muscular-energy s.s. i Power s.s.
13
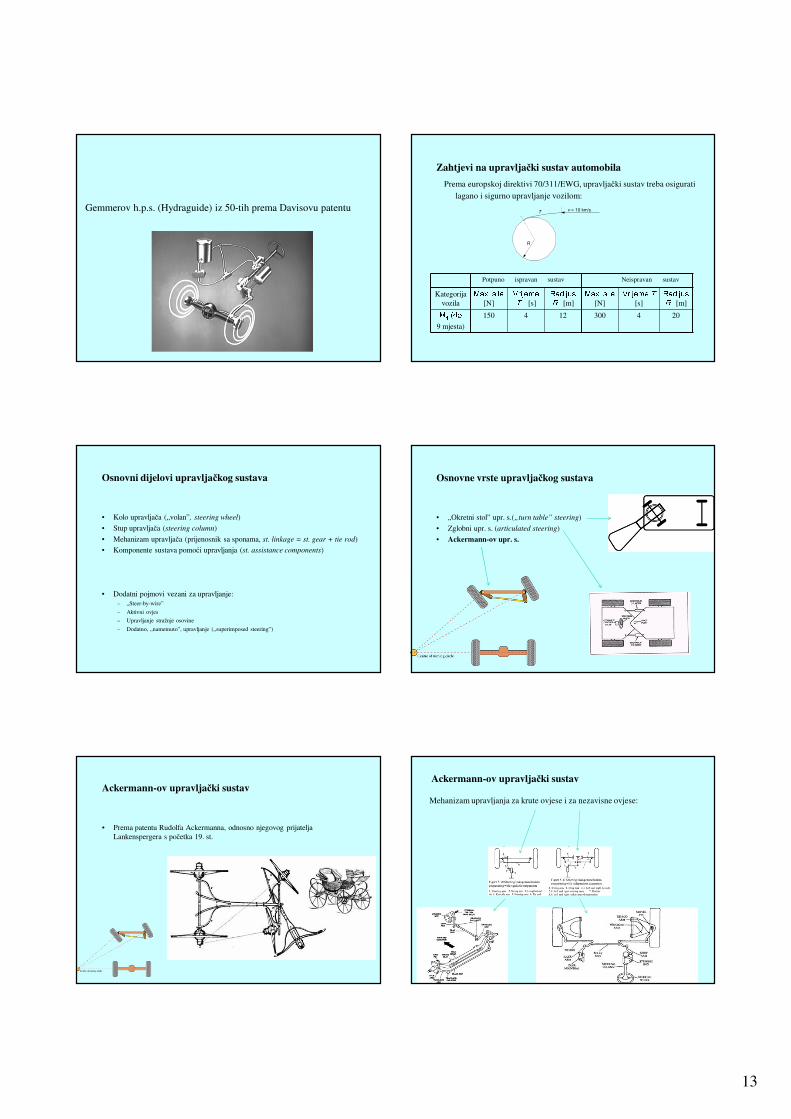
Gemmerov h.p.s. (Hydraguide) iz 50-tih prema Davisovu patentu
Zahtjevi na upravljački sustav automobila
Prema europskoj direktivi 70/311/EWG, upravljački sustav treba osigurati
lagano i sigurno upravljanje vozilom:
R
v = 10 km/sT
Potpuno ispravan sustav Neispravan sustav
Kategorija vozila
Max sila[N]
Vrijeme T [s]Radijus R [m]
Max sila[N]
Vrijeme T[s]
Radijus R [m]M1 (do 9 mjesta)
150 4 12 300 4 20
Osnovni dijelovi upravljačkog sustava
• Kolo upravljača („volan”, steering wheel)
• Stup upravljača (steering column)
• Mehanizam upravljača (prijenosnik sa sponama, st. linkage = st. gear + tie rod)
• Komponente sustava pomoći upravljanja (st. assistance components)
• Dodatni pojmovi vezani za upravljanje: – „Steer-by-wire”
– Aktivni ovjes
– Upravljanje stražnje osovine
– Dodatno, „nametnuto”, upravljanje („superimposed steering”)
Osnovne vrste upravljačkog sustava
• „Okretni stol” upr. s.(„turn table” steering)
• Zglobni upr. s. (articulated steering)
• Ackermann-ov upr. s.
Ackermann-ov upravljački sustav
• Prema patentu Rudolfa Ackermanna, odnosno njegovog prijatelja Lankenspergera s početka 19. st.
Ackermann-ov upravljački sustav
Mehanizam upravljanja za krute ovjese i za nezavisne ovjese:
14
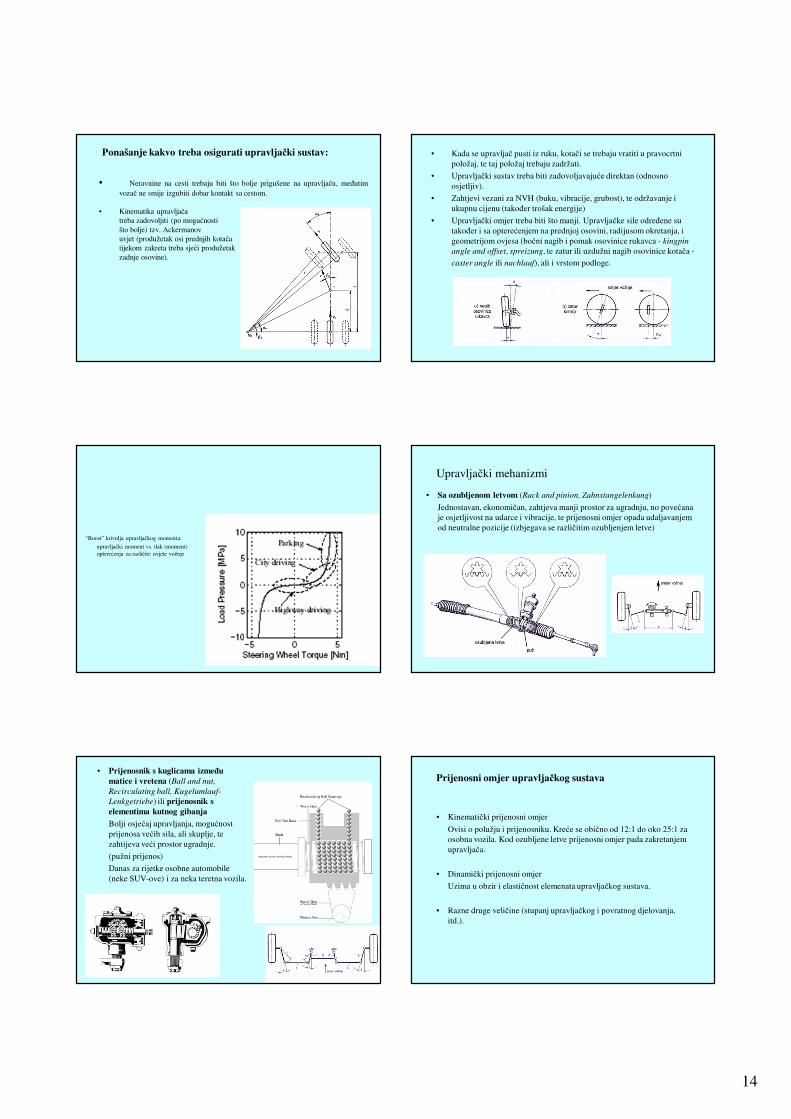
Ponašanje kakvo treba osigurati upravljački sustav:
• Neravnine na cesti trebaju biti što bolje prigušene na upravljaču, međutimvozač ne smije izgubiti dobar kontakt sa cestom.
• Kinematika upravljača treba zadovoljiti (po mogućnosti što bolje) tzv. Ackermanov uvjet (produžetak osi prednjih kotača tijekom zakreta treba sjeći produžetak zadnje osovine).
• Kada se upravljač pusti iz ruku, kotači se trebaju vratiti u pravocrtni položaj, te taj položaj trebaju zadržati.
• Upravljački sustav treba biti zadovoljavajuće direktan (odnosno osjetljiv).
• Zahtjevi vezani za NVH (buku, vibracije, grubost), te održavanje i ukupnu cijenu (također trošak energije)
• Upravljački omjer treba biti što manji. Upravljačke sile određene su također i sa opterećenjem na prednjoj osovini, radijusom okretanja, i geometrijom ovjesa (bočni nagib i pomak osovinice rukavca - kingpin
angle and offset, spreizung, te zatur ili uzdužni nagib osovinice kotača -
caster angle ili nachlauf), ali i vrstom podloge.
“Boost” krivulja upravljačkog momenta:
upravljački moment vs. tlak (moment) opterećenja za različite uvjete vožnje
Upravljački mehanizmi
• Sa ozubljenom letvom (Rack and pinion, Zahnstangelenkung)
Jednostavan, ekonomičan, zahtjeva manji prostor za ugradnju, no povećana je osjetljivost na udarce i vibracije, te prijenosni omjer opada udaljavanjem od neutralne pozicije (izbjegava se različitim ozubljenjem letve)
• Prijenosnik s kuglicama između
matice i vretena (Ball and nut,
Recirculating ball, Kugelumlauf-
Lenkgetriebe) ili prijenosnik s
elementima kutnog gibanja
Bolji osjećaj upravljanja, mogućnost prijenosa većih sila, ali skuplje, te zahtijeva veći prostor ugradnje.
(pužni prijenos)
Danas za rijetke osobne automobile (neke SUV-ove) i za neka teretna vozila.
Prijenosni omjer upravljačkog sustava
• Kinematički prijenosni omjer
Ovisi o polužju i prijenosniku. Kreće se obično od 12:1 do oko 25:1 za osobna vozila. Kod ozubljene letve prijenosni omjer pada zakretanjem upravljača.
• Dinamički prijenosni omjer
Uzima u obzir i elastičnost elemenata upravljačkog sustava.
• Razne druge veličine (stupanj upravljačkog i povratnog djelovanja, itd.).
15
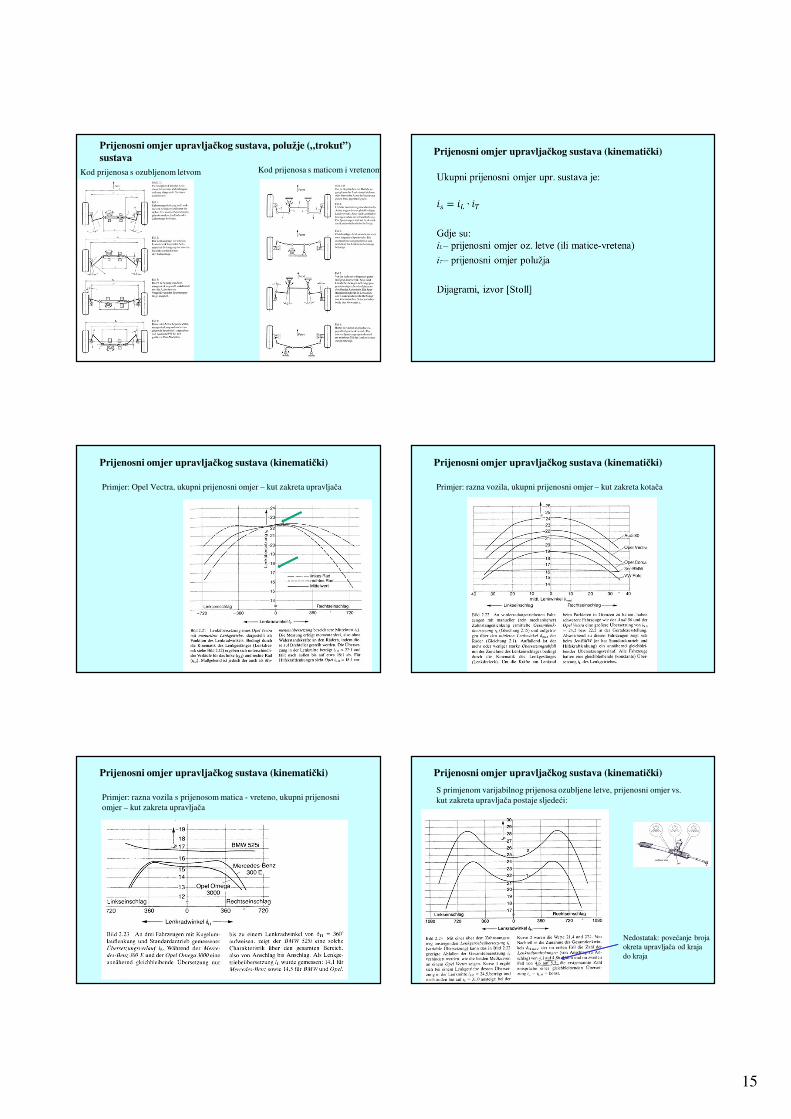
Prijenosni omjer upravljačkog sustava, polužje („trokut”)
sustava
Kod prijenosa s ozubljenom letvom Kod prijenosa s maticom i vretenom
Prijenosni omjer upravljačkog sustava (kinematički)
Prijenosni omjer upravljačkog sustava (kinematički)
Primjer: Opel Vectra, ukupni prijenosni omjer – kut zakreta upravljača
Prijenosni omjer upravljačkog sustava (kinematički)
Primjer: razna vozila, ukupni prijenosni omjer – kut zakreta kotača
Prijenosni omjer upravljačkog sustava (kinematički)
Primjer: razna vozila s prijenosom matica - vreteno, ukupni prijenosni omjer – kut zakreta upravljača
Prijenosni omjer upravljačkog sustava (kinematički)
S primjenom varijabilnog prijenosa ozubljene letve, prijenosni omjer vs. kut zakreta upravljača postaje sljedeći:
Nedostatak: povećanje broja okreta upravljača od kraja do kraja
16
Ukratko, upravljački sustav treba zadovoljiti slijedeće:
• sigurnost – aktivna i pasivna
• funkcionalnost – udobnost, prigušenje vibracija i udaraca i «handling»
• ekonomičnost – cijena sustava, ugradnje i održavanja, te potrošnja energije
• mogućnost aktivnog upravljanja
• Važne napomene:
zakretanje upravljačem – oko 15 % vožnje
upravljački sustav troši oko 2 – 6 % energije
Vrste potpomognutih upravljačkih sustava:
• hidraulički (HPS)
• elektro-hidraulički (EHPS)
• električni (EPS)
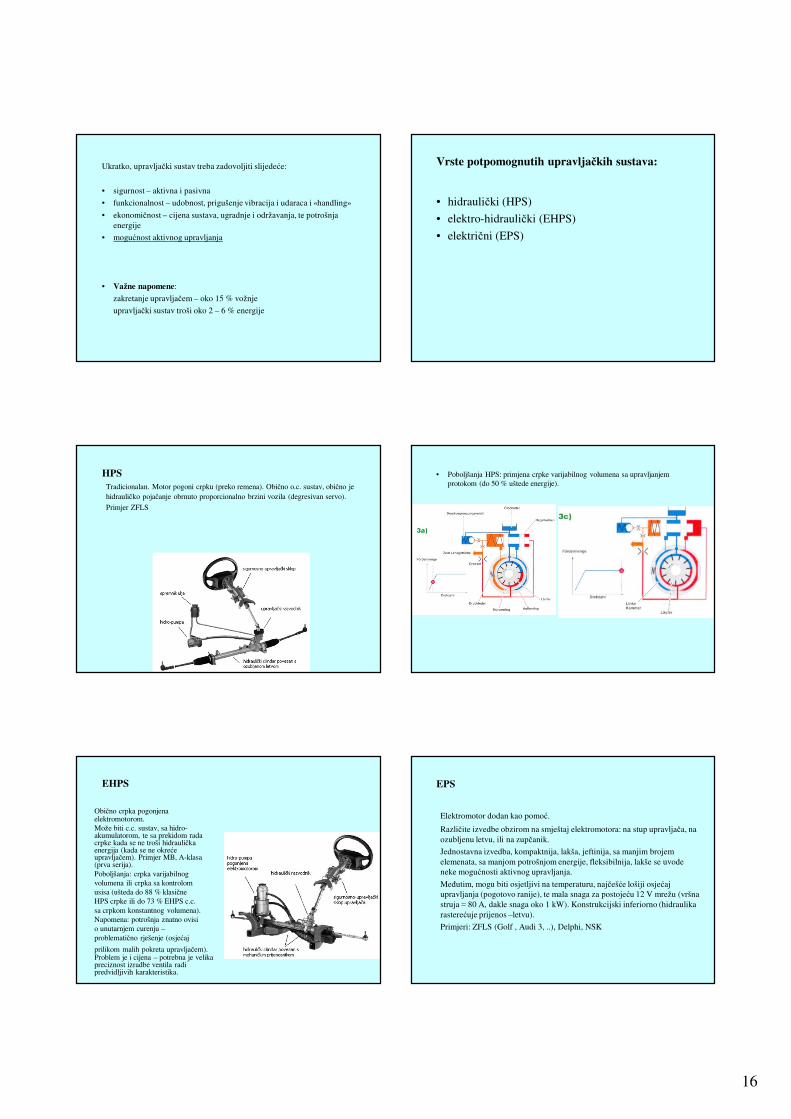
HPS
Tradicionalan. Motor pogoni crpku (preko remena). Obično o.c. sustav, obično je hidrauličko pojačanje obrnuto proporcionalno brzini vozila (degresivan servo).
Primjer ZFLS
• Poboljšanja HPS: primjena crpke varijabilnog volumena sa upravljanjem protokom (do 50 % uštede energije).
EHPS
Obično crpka pogonjena elektromotorom. Može biti c.c. sustav, sa hidro-akumulatorom, te sa prekidom rada crpke kada se ne troši hidraulička energija (kada se ne okreće upravljačem). Primjer MB, A-klasa (prva serija).Poboljšanja: crpka varijabilnog volumena ili crpka sa kontrolom usisa (ušteda do 88 % klasične HPS crpke ili do 73 % EHPS c.c. sa crpkom konstantnog volumena). Napomena: potrošnja znatno ovisi o unutarnjem curenju –problematično rješenje (osjećaj
prilikom malih pokreta upravljačem).Problem je i cijena – potrebna je velika preciznost izradbe ventila radi predvidljivih karakteristika.
EPS
Elektromotor dodan kao pomoć.
Različite izvedbe obzirom na smještaj elektromotora: na stup upravljača, na ozubljenu letvu, ili na zupčanik.
Jednostavna izvedba, kompaktnija, lakša, jeftinija, sa manjim brojem elemenata, sa manjom potrošnjom energije, fleksibilnija, lakše se uvode neke mogućnosti aktivnog upravljanja.
Međutim, mogu biti osjetljivi na temperaturu, najčešće lošiji osjećaj upravljanja (pogotovo ranije), te mala snaga za postojeću 12 V mrežu (vršna struja ≈ 80 A, dakle snaga oko 1 kW). Konstrukcijski inferiorno (hidraulika rasterećuje prijenos –letvu).
Primjeri: ZFLS (Golf , Audi 3, ..), Delphi, NSK
17
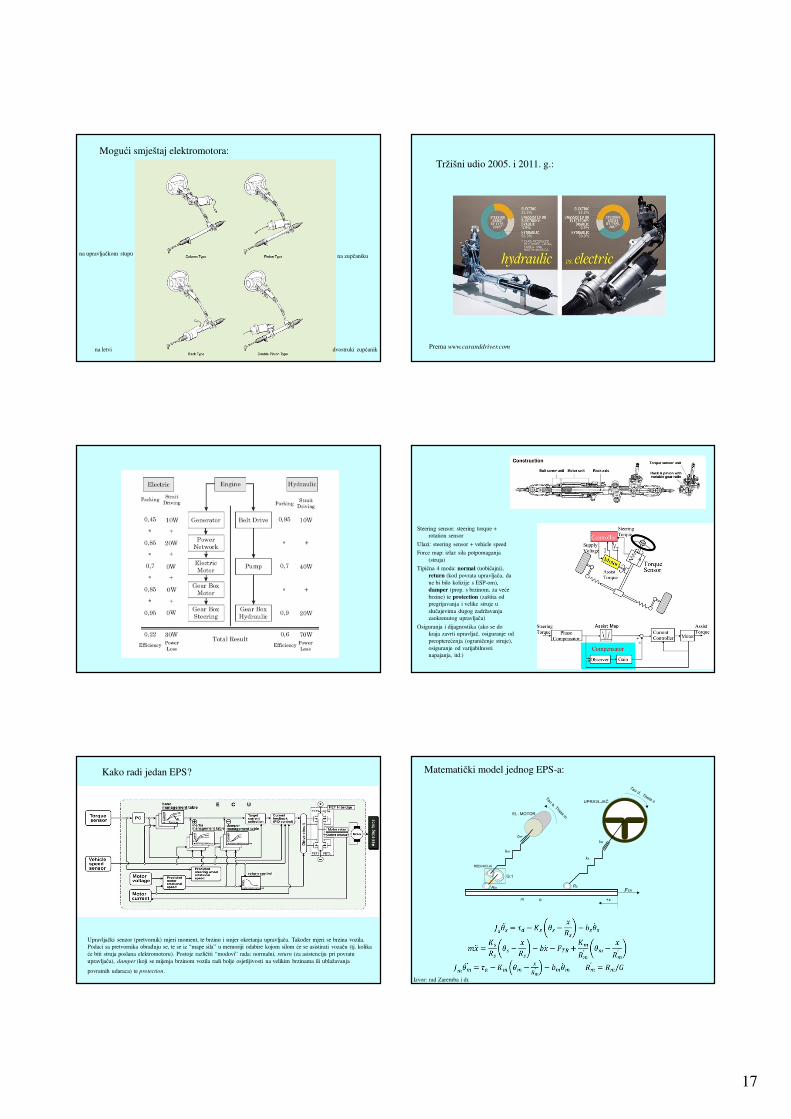
Mogući smještaj elektromotora:
na letvi dvostruki zupčanik
na zupčanikuna upravljačkom stupu
Tržišni udio 2005. i 2011. g.:
Prema www.caranddriver.com
Steering sensor: steering torque + rotation sensor
Ulazi: steering sensor + vehicle speed
Force map: izlaz sila potpomaganja (struja)
Tipična 4 moda: normal (uobičajni), return (kod povrata upravljača, da ne bi bilo kolizije s ESP-om), damper (prop. s brzinom, za veće brzine) te protection (zaštita od pregrijavanja i velike struje u slučajevima dugog zadržavanja zaokrenutog upravljača)
Osiguranja i dijagnostika (ako se do kraja zavrti upravljač, osiguranje od preopterećenja (ograničenje struje), osiguranje od varijabilnosti napajanja, itd.)
Kako radi jedan EPS?
Upravljački senzor (pretvornik) mjeri moment, te brzinu i smjer okretanja upravljača. Također mjeri se brzina vozila. Podaci sa pretvornika obrađuju se, te se iz “mape sila” u memoriji odabire kojom silom će se asistirati vozaču (tj. kolika će biti struja poslana elektromotoru). Postoje različiti “modovi” rada: normalni, return (za asistenciju pri povratu upravljača), damper (koji se mijenja brzinom vozila radi bolje osjetljivosti na velikim brzinama ili ublažavanja
povratnih udaraca) te protection.
Matematički model jednog EPS-a:
FTR
+x
Tau d, Theta sTau a, Theta m
UPRAVLJAČ
EL. MOTOR
REDUKCIJA
bm
km
ks
bs
G:1
Rm Rs
m b
Izvor: rad Zaremba i dr.
18
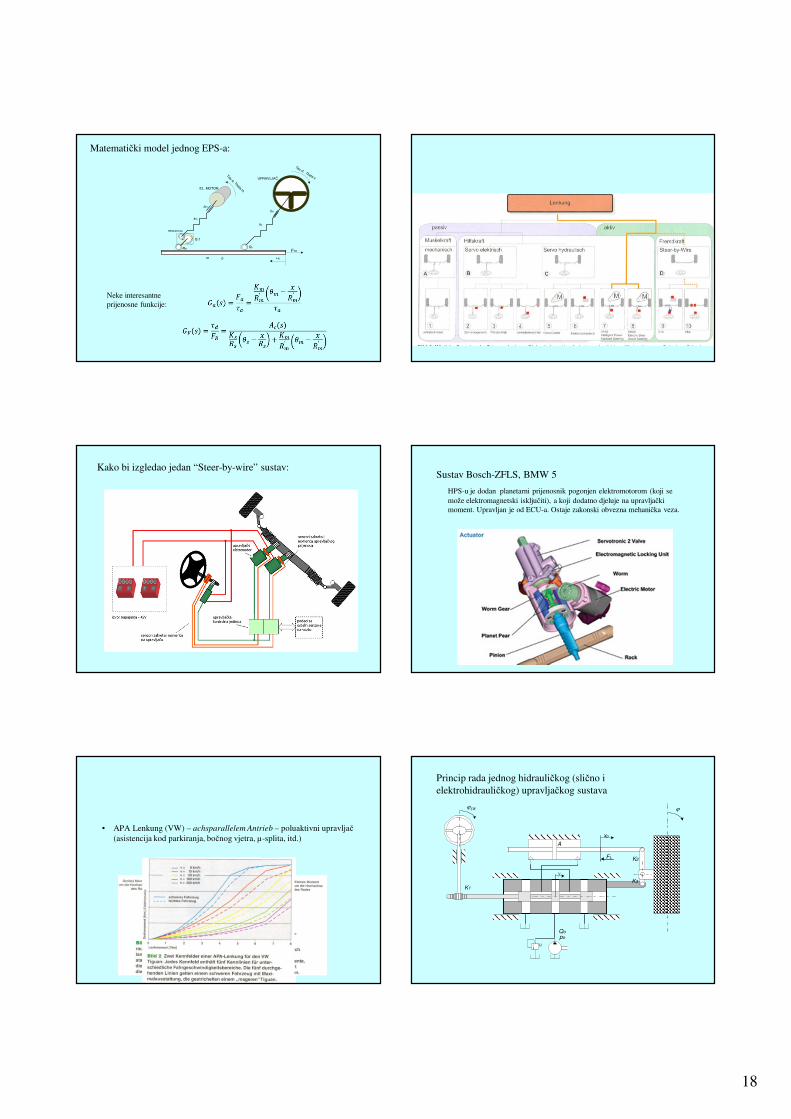
Matematički model jednog EPS-a:
FTR
+x
Tau d, Theta sTau a, Theta m
UPRAVLJAČ
EL. MOTOR
REDUKCIJA
bm
km
ks
bs
G:1
Rm Rs
m b
Neke interesantne prijenosne funkcije:
Kako bi izgledao jedan “Steer-by-wire” sustav:Sustav Bosch-ZFLS, BMW 5
HPS-u je dodan planetarni prijenosnik pogonjen elektromotorom (koji se može elektromagnetski isključiti), a koji dodatno djeluje na upravljački moment. Upravljan je od ECU-a. Ostaje zakonski obvezna mehanička veza.
• APA Lenkung (VW) – achsparallelem Antrieb – poluaktivni upravljač (asistencija kod parkiranja, bočnog vjetra, µ-splita, itd.)
Princip rada jednog hidrauličkog (slično i elektrohidrauličkog) upravljačkog sustava
y
FL
xp
A
ϕSWϕ
K1
K2
K3
po
Qo
19
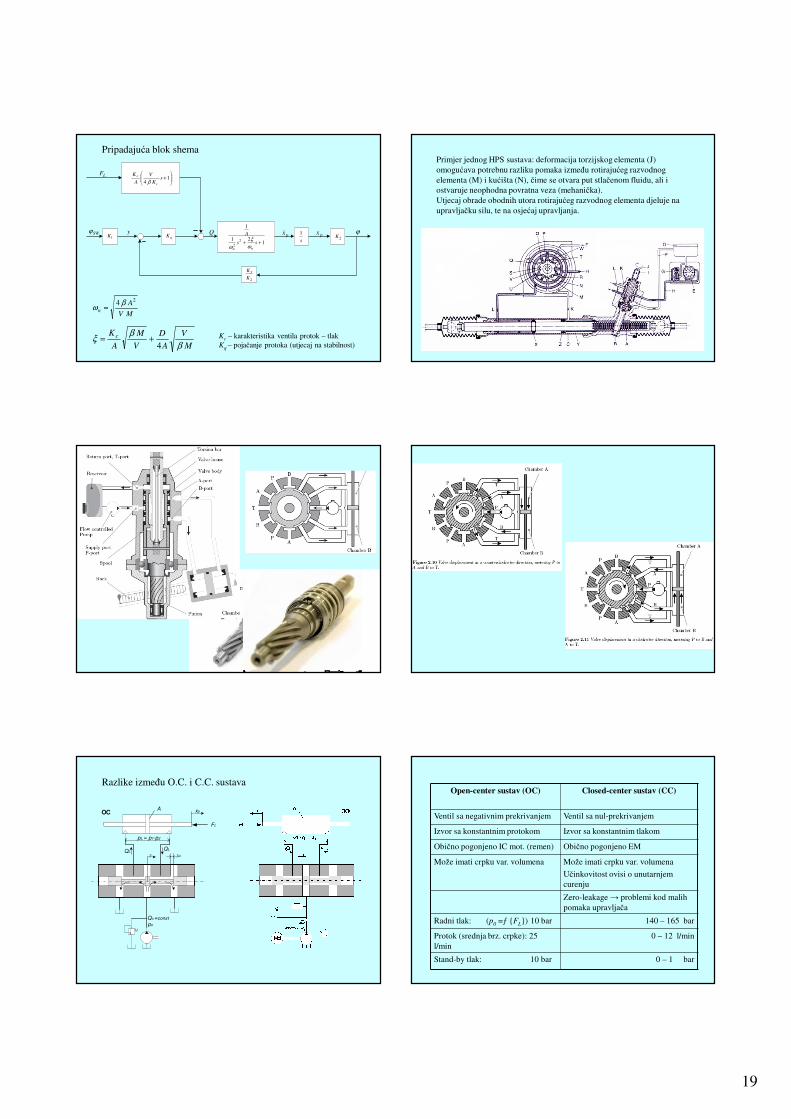
Pripadajuća blok shema
121
1
22
++ ss
A
nnω
ξ
ωs
1qK
2K1K
2
3
K
K
SWϕ ϕ
LF
pxypx&Q
+1
4s
K
V
A
K
c
c
β
MV
An
24 βω =
M
V
A
D
V
M
A
K c
β
βξ
4+= Kc – karakteristika ventila protok – tlak
Kq – pojačanje protoka (utjecaj na stabilnost)
Primjer jednog HPS sustava: deformacija torzijskog elementa (J) omogućava potrebnu razliku pomaka između rotirajućeg razvodnog elementa (M) i kućišta (N), čime se otvara put stlačenom fluidu, ali i ostvaruje neophodna povratna veza (mehanička). Utjecaj obrade obodnih utora rotirajućeg razvodnog elementa djeluje na upravljačku silu, te na osjećaj upravljanja.
Razlike između O.C. i C.C. sustava
y yo
pL = p1-p2
FL
po
Qo =const
QLQL
xpA
OC
Open-center sustav (OC) Closed-center sustav (CC)
Ventil sa negativnim prekrivanjem Ventil sa nul-prekrivanjem
Izvor sa konstantnim protokom Izvor sa konstantnim tlakom
Obično pogonjeno IC mot. (remen) Obično pogonjeno EM
Može imati crpku var. volumena Može imati crpku var. volumena
Učinkovitost ovisi o unutarnjem curenju
Zero-leakage → problemi kod malih pomaka upravljača
Radni tlak: (p0 =ƒ {FL}) 10 bar 140 – 165 bar
Protok (srednja brz. crpke): 25 l/min
0 – 12 l/min
Stand-by tlak: 10 bar 0 – 1 bar
20
Literatura
Harrer, M. & Pfeffer, P.: Steering Handbook, Springer 2017.
Ivanic, I.: Hidraulički potpomognuti mehanizam osobnog vozila, Diplomski rad, FSB 2003.
Petrić, J.: Analysis of Electro-Hydraulic Car Steering Systems, 7. Innovative Automotive Technology, Bled, 2005.
Stoll, H.: Fahrwerktechnik: Lenkanlagen und Hilfskraftlenkungen, Vogel Buchverlag, Würzburg, 1992.
Nied-Menninger, T. and Faßbender, A.: Hydraulische oder elektrische Servolenkung für neue Kraftfahrzeuge, 1. Internationales Fluidtechniches Kolloquium, Aachen, 1998.
Müller, S. and Bootz, A.: Future electrohydraulic power-steering systems for full steer-by-wire functionality, 4. International Fluid Power Conference, Dresden, 2004.
Rösth, M.: Hydraulic Power Steering System Desgn in Road Vehicles, Ph.D. Thesis, University of Linköping, 2007.
Avak, B.: Modeling and control of a Superimposed Steering System, M.Sc. thesis, Georgia Inst. of Tech. , 2004.
Zaremba, A. And Davis, R.I.: Dynamic analysis and stability of a power assist steering system, Proc. Of the ACC, 1995.
Lulić, Z., Šagi, G., Ormuž, K.: Motorna vozila: Konstrukcija vozila – ovjes automobila, materijali za predavanja, FSB
Automotive Handbook, 5th edition, Bosch, 2000.








