Upload
others
View
15
Download
0
Embed Size (px)
Citation preview
Sergey G. Glebov, Oleg M. Kiselev, Nikolai N. TarkhanovNonlinear Equations with Small Parameter
De Gruyter Series in NonlinearAnalysis and Applications
Editor in ChiefJürgen Appell, Würzburg, Germany
EditorsCatherine Bandle, Basel, SwitzerlandAlain Bensoussan, Richardson, Texas, USAAvner Friedman, Columbus, Ohio, USAMikio Kato, Nagano, JapanWojciech Kryszewski, Torun, PolandUmberto Mosco, Worcester, Massachusetts, USALouis Nirenberg, New York, USASimeon Reich, Haifa, IsraelAlfonso Vignoli, Rome, ItalyKatrin Wendland, Freiburg, Germany
Volume 23/1
Sergey G. GlebovOleg M. KiselevNikolai N. Tarkhanov
Nonlinear Equationswith Small Parameter
Volume 1: Oscillations and Resonances
Mathematics Subject Classification 201034–02, 34A34, 34C15, 34D05, 34D20, 34E05, 34E10, 34E15, 34E20, 70K30
AuthorsProf. Dr. Sergey Glebov Prof. Dr. Nikolai TarkhanovChair of Mathematics Universität PotsdamUfa State Petroleum Institut für MathematikTechnological University Am Neuen Palais 10Faculty of General Scientific Discipline 14469 PotsdamKosmonavtov St. 1 GermanyUfa 450062 [email protected] [email protected]
Prof. Dr. Oleg M. KiselevRussian Academy of SciencesUFA Scientific CentreInstitute of MathematicsChernyshevsky str. 112Ufa 450008Russian [email protected]
ISBN 978-3-11-033554-5e-ISBN (PDF) 978-3-11-033568-2e-ISBN (EPUB) 978-3-11-038272-3Set-ISBN 978-3-11-033569-9ISSN 0941-813X
Library of Congress Cataloging-in-Publication DataA CIP catalog record for this book has been applied for at the Library of Congress.
Bibliographic information published by the Deutsche NationalbibliothekThe Deutsche Nationalbibliothek lists this publication in the Deutsche Nationalbibliografie; detailedbibliographic data are available on the Internet at http://dnb.dnb.de.
© 2017 Walter de Gruyter GmbH, Berlin/BostonTypesetting: Integra Software Services Pvt. Ltd.Printing and binding: CPI books GmbH, Leck@ Printed on acid-free paperPrinted in Germany
www.degruyter.com
PrefaceThe book presents new methods of construction of global asymptotics of solutions tononlinear equations with small parameter. They allow one to match asymptotics ofvarious properties with each other in transition regions and to get unified formulasfor connection of characteristic parameters of approximate solutions.
This approach underlies modern asymptotic methods and gives a deep insightinto crucial nonlinear phenomena of natural sciences. These are beginnings of chaosin dynamical systems, incipient solitary and shock waves, oscillatory processes incrystals, engineering constructions and quantum systems. Apart from independentinterest, the approximate solutions serve as a foolproof basis for testing numericalalgorithms.
The book is naturally divided into two volumes. In the first volume we discussasymptotic methods mostly by the example of ordinary differential equations. Thesecond volume is devoted to applications of asymptotic methods in partial differentialequations.
Prerequisites for reading this book are some acquaintance with the elementarytheory of ordinary differential equations and a good knowledge of classical analysis.The main concepts and methods will be comprehensible for graduate students ofphysics and engineering sciences.
We use and present many ideas going back to diverse mathematicians. We tried todescribe the historical development to the best of our knowledge. However, we haveprobably failed at many instances.
This book grew out of the results of a joint project “Nonlinear differential equa-tions with small parameter” of the authors supported by the German Research Society(DFG) and Russian Foundation for Basic Research (RFFI) in 2007–2014 and partiallyby Russian Scientific Foundation (14-11-00078) in 2014–2016. O.M. Kiselev was alsograteful to his wife Irina for her support while working on this book. The help of allthese institutions, friends and colleagues was invaluable.
ContentsIntroduction XV
1 Asymptotic expansions and series 11.1 Definitions of Asymptotic Series and Examples 11.1.1 An Example of Divergent Series 11.1.2 Order Operators 41.1.3 Calibration Sequence. Asymptotic Series 51.1.4 Problems 81.2 Summation of Asymptotic Series 91.2.1 Asymptotic Representation of Functions 91.2.2 Theorem on the Uniqueness of Asymptotic Expansion 101.2.3 Theorem on Existence of a Function with the Given
Asymptotic Expansion 111.2.4 Problems 121.3 Laplace Method and Gamma Function 131.3.1 Asymptotic Expansion of Integral when Subintegral Function
Exponent Does Not Contain Extrema 131.3.2 Asymptotic Expansion of Integral, When Integrand Exponent
Contains Extrema 131.3.3 Derivation of Integral Formula for Gamma Function 151.3.4 Moivre–Stirling Formula 171.3.5 Problems 171.4 Fresnel Integral and Stationary Phase Method 171.4.1 Riemann Lemma 181.4.2 Fresnel Integral Formulae 181.4.3 Large Values of Argument 191.4.4 Method of Stationary Phase 211.4.5 Problems 231.5 Airy Function and Its Asymptotic Expansion 241.5.1 Airy’s Equation 241.5.2 An Integral Representation of General Solution for Airy
Equation 241.5.3 Asymptotic Expansion for the Airy Function as
z → –∞ 281.5.4 Saddle-Point Method and the Airy Function Asymptotic
Expansion as z →∞ 291.5.5 Problem 301.6 Functions of Parabolic Cylinder 301.6.1 Parabolic Cylinder Equation 301.6.2 Integral Representation 31
VIII Contents
1.6.3 Connection Formulae at Different Values of Parameter 331.6.4 Values at Origin of Coordinates 341.6.5 Problems 351.7 WKB Method 351.7.1 Application of WKBMethod for Ordinary Differential Equation
of the Second Order 351.7.2 Justification of Constructed Asymptotic Expansion 381.7.3 Quasi-Classical Asymptotic Expansion and Transition
Points 411.7.4 Essentially Singular Points of Differential Equation and the
Stokes Phenomenon 421.7.5 Problems 43
2 Asymptotic methods for solving nonlinear equations 442.1 Fast Oscillating Asymptotic Expansions for Weak Nonlinear Case 442.1.1 Asymptotic Substitution 452.1.2 Equations for Leading-Order Term and First-Order Correction
Term 462.1.3 Equation for the nth Term of Formal Series and Domain of
Validity 482.1.4 Justification of Asymptotic Series 492.1.5 Problems 522.2 Boundary Layer Method 522.2.1 Asymptotic Solution 532.2.2 Boundary Layer 542.2.3 Justification of Asymptotic Solution 572.2.4 Problems 592.3 Catastrophes and Regular Expansions 592.3.1 A Formal Series with Respect to Powers of Small
Parameter 602.3.2 Justification of Asymptotic Series 622.3.3 Non-analytic Perturbation 642.3.4 Matching of the Asymptotic Series for the Root of Cubic
Equation 652.3.5 Compound Asymptotic Expansion for Root of Cubic
Equation 662.3.6 Problems 672.4 Weierstrass Function 672.4.1 Differential Equation 672.4.2 Doubly Periodicity 682.4.3 A Representation by Series 692.4.4 Evenness 70
Contents IX
2.4.5 Liouville’s Theorem 702.4.6 Problem 712.5 Jacobi Elliptic Functions 712.5.1 Sin-Amplitude Function 712.5.2 Periodicity 722.5.3 Jacobi Elliptic Functions 732.5.4 Regular Expansion in the Neighbourhood of Zero Value of
Argument 752.5.5 Regular Expansion in the Neighbourhood of Zero Value of
Parameter 752.5.6 Regular Expansion in the Neighbourhood of k = 1 762.5.7 Problems 772.6 Uniform Asymptotic Behaviour of Jacobi-sn Near a Singular Point. The Lost
Formula from Handbooks for Elliptic Functions 772.6.1 The Asymptotic Behaviour of the Period 782.6.2 Asymptotic Behaviour on a Regular Part of Trajectory 802.6.3 Asymptotic Behaviour Near Turning Point 822.6.4 Uniform Asymptotic Expansion 832.7 Mathieu’s and Lame’s Functions 842.7.1 Hill’s Equation and Floquet’s Theory 842.7.2 Examples 862.7.3 Mathieu Functions 872.7.4 Construction of Mathieu’s Functions 882.7.5 Lindeman form of Mathieu’s Equation 902.7.6 Special Case of Lame’s Equation 902.7.7 Degenerate Case 922.7.8 Problems 92
3 Perturbation of nonlinear oscillations 933.1 Regular Perturbation Theory for Nonlinear Oscillations 953.1.1 Properties of Solutions for Unperturbed Equation 953.1.2 Formal Asymptotic Expansion for Solution 963.1.3 Solution of Nonlinear Equation for Primary Term 973.1.4 Homogeneous Linearized Equation 973.1.5 Non-homogeneous Linearized Equation 993.1.6 First Correction for Perturbation Theory 1003.1.7 Second Correction in Formula (3.8) 1013.1.8 Causes Leading to the Growing of Corrections 1013.1.9 Problems 1023.2 Fast and Slow Variables 1023.2.1 Two-Scaling Method 1023.2.2 Isochronous Oscillations 104
X Contents
3.2.3 An Averaging of Isochronous Oscillations 1053.2.4 Transcendent Equation for Parameter 1073.2.5 Equations for Parameters of Averaging 1083.2.6 Problems 1093.3 Krylov–Bogolyubov Method 1093.3.1 Asymptotical Substitution 1113.3.2 Formula for Leading-Order Term of Asymptotic
Expansion 1123.3.3 Solution of Linearized Equation 1133.3.4 Periodic Solution for the First Correction 1153.3.5 Problems 1183.4 Higher-Order Terms in Krylov–Bogolyubov Method 1183.4.1 Second Correction of Perturbation Theory 1183.4.2 Periodic Solution of Equation for nth Correction 1223.5 Interval of Validity for Krylov–Bogolyubov’s Ansatz 1233.5.1 Small Neighbourhoods of a Centre 1233.5.2 Neighbourhood of Separatrix and Saddle 1243.5.3 Asymptotic Solution of a Cauchy Problem 124
4 Nonlinear oscillator in potential well 1284.1 Nonlinear Oscillator Near Separatrix 1314.1.1 Change to Simple Form 1324.1.2 Qualitative Behaviour and Numerical Analysis 1344.2 Asymptotic Solution Close to Separatrix 1354.2.1 Construction of Germ Asymptotic Expansion 1354.2.2 Behaviour of Correction Terms in the Neighbourhood of the
Separatrix 1364.2.3 Asymptotic Expansion Near Saddle Point 1404.2.4 Asymptotic Solution in the Neighbourhood of Lower
Separatrix 1414.2.5 Parameters of Equation and Cantor Set 1444.3 Oscillations with External Force into Potential Well 1454.3.1 An Asymptotic Problem of a Capture 1484.4 Non-resonant Regions of Parameter 1494.4.1 An Equation for Averaged Action 1494.4.2 The Substitution of Krylov–Bogolyubov 1514.4.3 Linearized Equation 1524.4.4 Construction of the First Correction Term 1544.4.5 Construction of the Second Correction Term 1564.4.6 Resonances in Higher-Order Correction Terms 1594.5 Asymptotics in Resonant Regions 1594.5.1 Formal Derivation of Nonlinear Resonance Equation 159
Contents XI
4.5.2 Inner Asymptotic Expansion 1614.5.3 Capture into Resonance 1624.5.4 Asymptotic Solutions of the Equation of Nonlinear
Resonance 1644.5.5 Matching of Asymptotic Expansions 1674.5.6 Asymptotic Solution of the Capture Problem 168
5 Autoresonances in nonlinear systems 1705.1 Problems of Autoresonance 1705.1.1 The Arising of Autoresonance 1705.1.2 Autoresonant Asymptotic Expansions and Scattering
Problem 1715.1.3 Cut-Off of a Resonant Growth 1725.2 Threshold of Amplitude for Autoresonant Pumping 1735.2.1 Autoresonant Solution 1735.2.2 Asymptotic Substitution 1745.2.3 Stability of Autoresonant Solution 1755.3 Capture Into Autoresonance 1765.3.1 Setting of the Problem for Trajectories of Large
Amplitude 1765.3.2 Numeric Results and Instability 1765.3.3 Oscillations Far from the Capture 1775.4 A Searching of Suitable Asymptotic Expansion 1815.4.1 Asymptotic Expansion Towards Bifurcation 1815.4.2 Asymptotic Expansion in Bottleneck 1845.4.3 Connection Formulas for Perturbed System 1915.5 A Thin Manifold of a Captured Trajectories 1935.5.1 Slowly Varying Equilibrium Points 1935.5.2 A Rough Conservation Law 1945.5.3 Breaking Up of Separatrix 1945.6 Asymptotic Solution of the Capture Problem 1955.6.1 Matching to Bottleneck Asymptotic Expansion 1965.6.2 Numerical investigations 1965.6.3 Asymptotics and Numeric Points View 1985.7 Capture into Parametric Resonance 2005.7.1 Numeric Analysis 2015.7.2 Qualitative Analysis 2015.8 WKB Solution Before the Capture 2045.8.1 The WKB Solution Closed to Zero 2045.8.2 Constructing of the WKB Solution for Nonlinear Equation
(5.40) 2065.9 The Painlevé Layer 207
XII Contents
5.9.1 The Asymptotic Expansion in the Painlevé Layer 2085.9.2 Matching with the WKB Asymptotic Expansion 2115.10 The Captured WKB Asymptotic Solution 2125.10.1 Slowly Varying Solutions 2125.10.2 WKB Asymptotic Expansion Close to the Slowly Varying
Centres 213
6 Asymptotics for loss of stability 2186.1 Hard Loss of Stability in Painlevé-2 Equation 2186.1.1 Naive Statement of the Problem 2206.1.2 Matched Asymptotics for the Solution 2216.1.3 The Outer Algebraic Asymptotics 2246.1.4 The Domain of Validity of the Algebraic Asymptotic
Solution 2256.2 The Inner Asymptotics 2266.2.1 First Inner Expansion 2266.2.2 Second Inner Expansion 2286.2.3 Dynamics in the Internal Layer 2316.2.4 The Asymptotics of the Inner Expansions as 4→∞ 2316.3 Fast Oscillating Asymptotics 2366.3.1 The Krylov–Bogolyubov Approximation 2366.3.2 Degeneration of the Fast Oscillating Asymptotics 2386.3.3 The Domain of Validity of the Fast Oscillating
Asymptotics 2416.3.4 The Matching of the Fast Oscillating Asymptotic Solution
and the Inner Asymptotics 2456.4 An Asymptotic Solution Slowly Crossing the Separatrix Near
a Saddle-Centre Bifurcation Point 2466.4.1 Typical Problems for the Autoresonance 2476.4.2 Three Types of Algebraic Solutions 2476.5 Expansions in Bifurcation Layer 2496.5.1 Initial Interval 2496.5.2 The Bifurcation Layer in the Case of Bounded k 2636.5.3 The Intermediate Expansion for Large k 2726.6 Fast Oscillating Asymptotic Expansion 2756.6.1 Family of the Fast Oscillating Solutions 2766.6.2 The Confluent Asymptotic Solution 2806.6.3 The Domain of Validity of Confluent Asymptotic Solution as
t → t∗ – 0 2806.6.4 Matching of the Asymptotics 2846.6.5 Asymptotic Behaviours 2856.7 Dissipation Is Cause for Halt of Resonant Growth 288
Contents XIII
6.7.1 Setting of the Problem 2896.7.2 Asymptotics of Autoresonant Growth Under
Dissipation 2906.7.3 Stability of Autoresonant Growth 2936.7.4 Vicinity of the Break of Autoresonant Growth 2946.8 Break of Autoresonant Growth 2956.8.1 Fast Motion 3006.8.2 Formal Approach to Answer 3016.9 Open Problems 3056.9.1 Hierarchy of Equations in Transition and Painlevé
Equations 305
7 Systems of coupled oscillators 3097.1 The Autoresonance Threshold into System of Weakly Coupled Oscillators 3097.1.1 Statement of the Problem and Result 3107.1.2 Asymptotic Reduction to the System of Primary Resonance
Equations 3107.1.3 Algebraic Asymptotic Solutions 3117.1.4 Neighbourhoods of Equilibrium Positions 3167.2 Forced Nonlinear Resonance in a System of Coupled Oscillators 3207.2.1 Results 3217.2.2 Formal Constructions for : ≪ 1 3227.2.3 Analysis of Asymptotic Solution for + ≫ 1 326Bibliography 329Index 337
IntroductionMathematical equations arising from natural sciences contain parameters, e. g., thePlanck constant ℏ. This is a small parameter, while using the Fourier transform ina group of variables leads to equations including covariables that are to be treatedas large parameters. Analysis on manifolds with singularities motivates the study ofproblems containing both small and large parameters. On resolving a singularity andfreezing the “coefficients” one arrives at characteristic equations that include bothdistance to the singularity and covariables along its smooth strata.
On substituting + = 1/% for a large parameter + one passes to a small parameter %,and conversely. However, the formal substitution leads often to a confusion in in-terpreting the nature of the original problem. Unless otherwise stated, we focus ourattention on problems with small parameter. Generally speaking, one gains from in-troducing a small parameter, for its presence gives rise to a special ansatz for thesolution. Even if the equation contains no small parameter it deserves to create it.
In mathematics one uses asymptotic methods where it is impossible to solve theproblem explicitly by precise methods and where no numerical methods are applic-able. The purpose of the book is to guide the reader from the foundation of asymptoticmethods up to modern investigations using asymptotics and perturbation theory innonlinear equations. The exposition is based on inductive reasoning, i. e., simple pro-gression fromparticular instances to broader generalizations. The authors believe thata comprehensive primer elaborated in detail deserves often several theorems.
We study a nonlinear equation f (x, %) = 0 with small parameter % > 0, wheref : X × [0, %0) → Y is a continuous mapping of metric spaces. Continuous solutionsto this equation are curves x : (0, %0)→X in themetric spaceX . If a solution x = x(%)has a limit x0 ∈ X as % → 0, then f (x0, 0) = 0. The equation f (x, 0) is referred to asunperturbed, while f (x, %) = 0 is called its perturbation. The perturbation f (x, %) = 0 issaid to be regular if any solution x = x(%) converges in X as %→ 0. Otherwise the per-turbation is called singular. For instance, the equation x2 = % is regularly perturbed,while %x2 = 1 is obviously a singular perturbation. For regular perturbations, the for-mula x(%) = x0 + o(1) gives an approximate solution to f (x, %) = 0 for small % > 0, whereo(1)→ 0 in the metric of X as %→ 0.
In applications, X is often a function space. Then, the perturbation regularitysupposes automatically that any solution x = x(%) to f (x, %) = 0 converges in the normofX as %→ 0, e. g., uniformly in the corresponding variable. By the very definition, aperturbation f (x, %) = 0 is regular if there is no curve x = x(%) satisfying this equation.
If both X and Y are normed spaces, more advanced analysis is possible, whichinvokes differential calculus. Assume f is differentiable in X × {0}. One looks for asolution to f (x, %) = 0 of the form x(%) = x0 + x1% + o(%) for small % > 0, where x0 and x1are fixed elements of X . On substituting the ansatz into the equation one obtains
f (x0, 0) + (f x(x0, 0)x1 + f % (x0, 0)) % + o(%) = 0
XVI Introduction
for all % ∈ (0, %0). Equating the coefficients of the same powers of % on both sides yields{{{ f (x0, 0) = 0,f x(x0, 0)x1 = – f % (x0, 0). (0.1)By the implicit function theorem, if the unperturbed equation f (x0, 0) = 0 has a solu-tion x0 ∈ X such that the linear map f x(x0, 0) : X → Y is invertible, then there isprecisely one curve x = x(%) defined in a small interval I around % = 0 and satisfy-ing f (x(%), %) = 0 for % ∈ I and x(0) = x0. Moreover, the curve is differentiable at % = 0.Hence it follows that the perturbation is regular, and the formula x(%) = x0+x(0)%+o(%)provides an approximate solution to f (x, %) = 0 for small % > 0.
If the unperturbed equation f (x0, 0) = 0 has no solutions while the perturbedf (x, %) = 0 has at least one, then the perturbation is singular. As one example wemention the solutions x(%) = ±1/√% to %x2 = 1 for % > 0, both diverging to ±∞as % → 0. Since a singularly perturbed problem possesses a solution for all % > 0small enough, one can choose any sufficiently small % > 0 and an approximate solu-tion of the form x(%) = x0 + o(1) valid for % ≤ % < %0, where o(1) → 0 in X as% → %. On the other hand, to construct an approximate solution x(%) to the per-turbed equation on a small interval (0, %) with % < % < %0, one applies a family T(%)of transformations Z →X , such that f (T(%)z, %) = 0 reduces to a regularly perturbedequation for z ∈ Z , the parameter % running in the interval (0, %). If z(%) = z0 + o(1) isan approximate solution to the equation f (T(%)z, %) = 0 for small % > 0, then the curvex(%) = T(%)(z0 + o(1)) provides an approximate solution to f (x, %) = 0 for % ∈ (0, %).Even if the equation f (x, %) = 0 has a unique solution for any parameter value in(%, %), this is no longer true for approximate solutions. Therefore, the asymptoticsolutions x(%) and x(%) should be matched in the common interval (%, %), whichgives a deeper insight into asymptotic analysis. Basically this means the rearrangingof the Taylor expansion of x(%) around % = %.
In applied sciences, it perhaps suffices to find only one or at most two terms ofthe approximate solution x(%) = x0 + x1% + o(%) to the equation f (x, %) = 0 for small %.However, one encounters familiar counter evidence, too. Since one fails to constructan explicit solution to f (x, %) = 0, it makes sense to search for an element
x(%) =∞∑n=0
xn%n (0.2)
in X which satisfies the equation approximately. Under certain hypotheses on f oneobtains
f ( ∞∑n=0
xn%n, %) = ∞∑n=0
fn%n, (0.3)
Introduction XVII
where the coefficients f0 = f (x0, 0) and fn = f x(x0, 0)xn + yn(x0, . . . , xn–1) with n ≥ 1are explicitly determined by f . Series (0.2) is called a formal asymptotic solution of theequation f (x, %) = 0 if all coefficients fn vanish. This reduces to the system{{{ f (x0, 0) = 0,f x(x0, 0)xn = – yn(x0, . . . , xn–1)for all n = 1, 2, . . ., which generalizes eq. (0.1).
In the singular perturbation theory, series (0.2) is said to be an outer asymptoticexpansion. This designation stems from hydrodynamics where one considers steadyflow of small viscosity fluid about a streamlined body. One might expect that the par-tial sums of series (0.2) approximate well the true solution x(%) for small % > 0. In otherwords, series (0.2) is an asymptotic series of x(%) as % → 0. It should be noted that noconvergence of the series is assumed, let alone for % bounded from zero.
Most asymptotic methods are very flexible and it is usually impossible to formu-late a single theoremwhich contains all possible application of the givenmethod. Anyattempt to generalize it would lead towards restricting potential. In this book, we tryto say as much as possible in any concrete situation. Hence, the choice of materials isquite arbitrary and it is subject to the experience of the authors.
Chapter 1 contains a traditional introduction into asymptotic analysis based onsimple, preferably exactly solvable, examples. Chapter 2 presents a short discussion ofasymptotic methods for nonlinear ordinary differential equations. This chapter givesalso asymptotics of elliptic, Lamé and Mathieu functions, which are often used asleading-order terms of asymptotic solutions to more general nonlinear differentialequations.
Chapter 3 focuses on asymptotic solutions to nonlinear nonautonomous equa-tions of order 2. The methods of perturbation theory are well motivated by celestialmechanics, let alone Newton’s second law of motion. Basically the approach containstwo steps including appropriate choice of slow and fast variables and the study ofoscillations first in the slow variable and then in the fast one.
While the material of the first three chapters is traditional, the study of Chapter 4and the subsequent chapters is relevant to the own research of the authors. Chapter 4develops perturbation theory to describe the behaviour of trajectories in a small neigh-bourhood of a separatrix, which applies to the problem of capture into a resonance ina potential hole. Chapters 5, 6 and 7 are about autoresonances in nonlinear systems.The autoresonance is nowadays thought of as universal phenomenon which occurs ina broad range of oscillating physical systems.
Series (0.2) need not converge even for analytic data of the problem unless theperturbation is regular. In case the data are analytic one can use analytic continuationin the parameter % to obtain a solution on the whole interval [0, %0). Otherwise one hasto show the asymptotic character of the series to make use of the formal solution givenby series (0.2). There is no efficient way to do this in general but some tricky recipes
XVIII Introduction
for very particular classes of problems. On using eq. (0.3) one tries to minimize thediscrepancy f (SN(%), %) of the Nth partial sum SN(%) of series (0.2). If x = x(%) is a truesolution to the equation f (x, %) = 0 for all nonzero % < %0 and
rN(%) = x(%) – SN(%)
the error term for N = 0, 1, . . ., then the asymptoticity of series (0.2) means thatrN = O(%N+1) as % → 0. Even if ‖f (rN , %)‖Y ≤ c %N+1 with c a constant independent of% and N, it is not possible to deduce from this that rN = O(%N+1). To this end, one needscertain continuity of the inverse mapping f –1 : Y → X × (0, %0). Generically suchstability theorems do fail. As eq. (0.3) suggests, perturbation theory reduces nonlinearequations with small parameter to linear ones provided that one succeeds in findinga good substitution for the solution of the corresponding unperturbed problem.
1 Asymptotic expansions and seriesIn this chapter we explain basic ideas of constructions for asymptotic approximations.The framework of this chapter is the study of examples and definitions of asymptoticnotations.
Main aims of this chapter are as follows:– Show naturalness of appearance of asymptotic series.– Give definitions for basic statements of asymptotic analysis.– Explain the regularity property of asymptotic series and combined asymptotic
series.
This chapter is based on lectures for students of applied mathematics. We considerexamples in detail but some technical calculations are not presented. The reader canperform such evaluations with the help of computer algebra systems. Problems givenin the end of sections are directed to the comprehension and deepening of obtainedknowledge.
Below we discuss asymptotic expansions of integrals by Laplace method, station-ary phase method. These methods are often used to study asymptotic behaviours ofsolutions for linear differential equations. At last we explain Wentzel, Kramers andBrilluen (WKB) approximation for solutions of ordinary differential equations. In thischapter we study– asymptotic expansions of Fresnel integral;– asymptotic expansions of solutions for Airy equation; and– asymptotic expansions of solutions for parabolic cylinder equation.
These solutions often appeared in studies of solutions for weak nonlinear equations.They play the role of a leading-order term of asymptotic expansions.
Here we show how the asymptotic methods work in well-known cases. This helpstudents to understand how to apply asymptotic methods to special functions.
1.1 Definitions of Asymptotic Series and Examples
In this section we present an example with divergent series. It is shown that this seriesis convenient to be used for the study of the integral for large values of parameter. Wegive definitions of calibration sequence and asymptotic series.
1.1.1 An Example of Divergent Series
Consider an example that is connected with the study of properties for Fresnel sin-integral as large values of argument:
DOI 10.1515/9783110335682-001
2 1 Asymptotic expansions and series
I(x) =∞∫x
sin(y2)dy. (1.1)
This integral often appears in applications and is a miracle of asymptotic theory.Integral (1.1) is convergent for all real values of x. We split an interval of integration
into intervals where sin(y2) is a function of fixed sign. Present the integral as a sum ofintegral over these intervals. It gives a sum of alternating series with decaying terms.Leibniz condition gives a convergence of the series.
The integrand is simple, but it is not possible to evaluate the integral by element-ary functions. Direct evaluations of integral are difficult due to fast oscillations ofintegrand as x →∞.
To estimate the integral for large values of x it is convenient to use integration byparts:
∞∫x
sin(y2)dy = –∞∫x
d cos(y2)2y
= cos(x2)
2x–∞∫x
d sin(y2)4y3
= cos(x2)
2x
+ sin(x2)
4x3+∞∫x
3d cos(y2)8y5
.
The order of value of integral for the last term is estimated:∞∫x 3d cos(y2)8y5 ≤ 34 ∞∫x sin(y2)y5 dy ≤ 34 ∞∫x dyy5 ≤ Cx4 ,where C = const > 0.
It gives a formula: ∞∫x sin(y2)dy – cos(x2)2x – sin(x2)4x3 ≤ Cx4 ,as x →∞.
We can improve this formula. For this purpose we integrate by parts step by step.The consequent integration of eq. (1.1) by parts gives a sum of two series:
∞∫x
sin(y2)dy ∼ cos(x2)2x
∞∑n=0
(–1)n 3 × 5 × 7 × ⋅ ⋅ ⋅ × (4n – 1)22n ∗ x4n
+ sin(x2)
4x3∞∑n=0
(–1)n 3 × 5 × 7 × ⋅ ⋅ ⋅ × (4n + 1)22nx4n
. (1.2)
The reader can note that these series are not suitable for calculation of the integral.Both series are diverging sequences for all real values of x. It is a reason of equivalencesign ∼.
1.1 Definitions of Asymptotic Series and Examples 3
Mathematicians of eighteenth century such as Leonhard Euler, Isaac Newton, Io-han Leibnitz, mechanics, astronomers and astrologists used segments of divergentseries in calculations. Examples with divergent series were known. A divergence ofseries in Stirling formula for factorial approximation was mentioned in the letterof Bayes [12]. Using divergent series became impossible after reconsideration of basisof analysis by Karl Gauss and Augustin Cauchy [24]. It was found that many obtainedresults required re-thinking. For example, these results are Moivre-Stirling formula forthe factorial approximation [29, 143] and formula for the harmonic sequence obtainedby Euler [33].
Henri Poincare tried to understand the celestial mechanics and to explain it math-ematically in the end of nineteenth century. He found that segments of divergent seriesgive good approximations that are well compatible with reviewings. The example ofthis application was detecting of Neptune by Le Verrier’s calculations. Poincare’s ef-forts gave an idea of asymptotic series and allowed him to formulate basis of newcelestial mechanics [138].
Series in eq. (1.2) have two important properties.First, a ratio of consequent to antecedent tends to zero for any n as x →∞. Denote
terms of the first series by an and terms of the second series by bn. Then:
an+1an
= –(4n + 1)(4n + 3)4x4
= 0, x →∞;bn+1bn
= –(4n + 5)(4n + 7)4x4
= 0, x →∞.Second, if we use segments with length N, ∀N ∈ N of series it gives the followingestimation:∞∫x sin(y2)dx – cos(x2)2x N∑n=0(–1)N 3 × 5 × 7 × ⋅ ⋅ ⋅ × (4n – 1)22nx4n
– sin(x2)
4x3N∑n=0
(–1)N 3 × 5 × 7 × ⋅ ⋅ ⋅ × (4n + 1)22nx4n
< cNx4N+2 , (1.3)where cN > 0. Index N means that value cN depends on the length of segment. Whatis more cN → ∞ as N → ∞. Nevertheless, the order of removed terms with respect tox is less than the order of the highest term in the segment of series.
Perturbation theory series in celestial mechanics have the same properties.It means:– these series are divergent for any small values of perturbation parameter;– any consequent term is essentially less than the antecedent term.
Poincare used these two properties to determine an asymptotic series.
4 1 Asymptotic expansions and series
1.1.2 Order Operators
The example from previous section contains all main ideas of asymptotic analysis.Here we discuss basic definitions.
Definition 1. Function f (x) is o-big with respect to 6(x) as x → x0, if ∃c, : ∈ ℝ such that|x – x0| < : as ∀x:
|f (x)| < c|6(x)|.
The notation is
f (x) = O(6(x)), x → x0.It means that function f (x) has an order of 6(x) as x → x0.Example 1.
cos(x) = O(1), ∀x ∈ ℝ;log(x) = O(x – 1), x → 1;sin(x)x2
= O(x–2), x →∞.It is important to note
sin(x)x2
= O(x–2), 1x2
̸= O (sin(x)x2
) , x →∞.However, if we remove nulls for function sin(x) it gives
1x2
= O (cos(x)x2
) , x → x0 ∀x0 ̸= 0n, n ∈ ℤ.Another definition is convenient for using functions of different order.
Definition 2. Function f (x) is o-small with respect to 6(x) as x → x0, iflimx→x0
f (x)6(x) = 0, x → x0.
The notation is
f (x) = o(6(x)), x → x0.
1.1 Definitions of Asymptotic Series and Examples 5
Example 2.
sin(x2) = o(x), x → 0;x = o(√x), x → 0.
Finally, if one function can be approximated by another one it is convenient to use anasymptotic equivalence:
Definition 3. Functions f (x) and 6(x) are asymptotic equivalent as x → x0 if:limx→x0
f (x)6(x) = 1.
The notation is
f (x) ∼ 6(x), x → x0.Example 3.
∞∫x
sin(x3)dx ∼ cos(x3)3x2
, x →∞.1.1.3 Calibration Sequence. Asymptotic Series
The definition of asymptotic equivalence allows to rewrite formulae from Section 1.1in more elegant form:
∞∫x
sin(y2)dy ∼ cos(x2)2x
+ sin(x2)
4x3, x →∞.
It is important to know the order of approximation. In this case we can use moreinformational formula:
∞∫x
sin(y2)dy = cos(x2)
2x+ sin(x
2)4x3
+ O(x–4),
as x →∞.To obtain an approximation that is accurate to any order x–N we use:
∞∫x
sin(y2)dy = cos(x2)
2x
N∑n=0
(–1)N 3 × 5 × 7 × ⋅ ⋅ ⋅ × (4n – 1)22nx4n
+ sin(x2)
4x3N∑n=0
(–1)N 3 × 5 × 7 × ⋅ ⋅ ⋅ × (4n + 1)22nx4n
+ O(x–4N–2).
6 1 Asymptotic expansions and series
In these formulae we use the inverse powers of x. It is easy to note
x–(n+1) = o(x–n), x →∞.Definition 4. Sequence of functions 6n(x) is called calibration one as x → x0 when therelation is valid:
6n+1(x) = o(6n(x)), x → x0.We can use calibration sequence 6n(x) = x–n for series in formula (1.2). Each con-sequent term has an order that is less than antecedent term. Series of this type areoften used for a function approximation:
Definition 5. Series of the form
∞∑n=1
anfn(x)
is called a formal asymptotic series as x → x0, where fn(x) = (O(6n(x)) and 6n(x) is acalibration sequence.
An asymptotic series as x →∞ for function (1.1) has form (1.4). It allows to write:∞∫x
sin(y2)dy ∼ cos(x2)2x
∞∑n=0
(–1)n 3 × 5 × 7 × ⋅ ⋅ ⋅ × (4n – 1)22nx4n
+ sin(x2)
4x3∞∑n=0
(–1)n 3 × 5 × 7 × ⋅ ⋅ ⋅ × (4n + 1)22nx4n
. (1.4)
It is important to understand difference between asymptotic series and convergentseries. An idea about an asymptotic series at x0 theorizes an idea about a convergentseries in the neighbourhood of point x0. But a convergent series can be applied to awide domain. Consider an example. This is Maclaurin series
ex =∞∑x=0
xn
n!
that is convergent for ∀x ∈ ℝ. But this series has an asymptotic property as x → 0 only.We can write a convergent series for function (1.1). That series is convergent for
any values of x. The well-known formula of analysis∞∫
–∞sin(y2)dy = √0
2
1.1 Definitions of Asymptotic Series and Examples 7
gives∞∫x
sin(y2)dy = √02–
x∫0
sin(y2)dy.
The integrand from right-hand side can be expanded into Maclaurin series andintegrated term by term. It gives a convergent series for any values of x
∞∫x
sin(y2)dy = √02–
∞∑n=0
(–1)n x4n+3
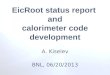
(4n + 3) × (2n + 1)! . (1.5)To use this formula for large values of x it is necessary to use many terms. Estimatea number of terms in segment of series to evaluate the value of integral accurately to10–2 as x = 10. This series is the alternating one. If absolute values of terms decay,then a residue term is estimated by the first neglected term. To estimate the residuewe find a number N so that following conditions are valid. First, absolute values ofterms of series monotonically decay. Second, each term is less than 0.01. When x = 10a number N satisfies
104N+3
(4N + 3) × (2N + 1)! ≤ 10–2or
104N+5 ≤ (4N + 3) × (2N + 1)!Taking the logarithm and simple evaluations give
log(4N + 3) +2N+1∑k=1
log(k) – (4N + 5) log(10) ≥ 1.This inequality is valid as N > 135.– To obtain an accuracy that is better than 0.01 at x = 10 one should summore than
135 terms of series (1.5).– To obtain the same accuracy at x = 10 one term of asymptotic series is sufficient
(see eq. (1.2)).
However, asymptotic series are suitable for evaluations of exact values. Evaluate aminimum error that can be obtained by using a segment of asymptotic series. Theaccuracy becomes better for as long as the absolute value of each next following termof asymptotic series is less or equal than the absolute amount of previous term. Whenx = 10 we have
3 × 5 × ⋅ ⋅ ⋅ × (4n + 1)104n+3
≤ 3 × 5 × ⋅ ⋅ ⋅ × (4n + 5)104n+5
or
(4n + 5) ≤ 102, n ≤ 23.
8 1 Asymptotic expansions and series
x
Approximations for the integral of fast-oscillating function
–4
–3
–2
–1
0
1
2
3
4
1 2 3 4 5 6 7 8 9 10
Sum of 200 terms of Maclaurin seriesSum of 4 terms of asymptotic series
Figure 1.1. Approximations of the integral by Maclaurin and asymptotic series.
– Let x = 10. A segment of asymptotic series (1.4) with N = 24 terms gives amaximum accuracy for integral (1.1).
– The error is estimated by 10–23.
For large values of x, maximum accuracy is obtained for large number of terms in theasymptotic series. It is shown on fig. 1.1.
1.1.4 Problems
1. Construct an asymptotic series and demonstrate a calibrate sequence for anintegral
I3(x) =∞∫x
sin(y3/3)dy, x →∞.2. Obtain a convergent series for I3(x). Compare numbers of terms into asymptotic
and convergent series that are sufficient for the evaluation of I3(10) with an errorless or equal than 0.01.
3. Evaluate a minimum error that can be obtained for I3(10) by an asymptotic series.
1.2 Summation of Asymptotic Series 9
4. Solve problems 1–3 for an integral
In(x) =∞∫x
sin(yn/n)dy, x →∞.5. Is a sequence xk sin(1/x), x → 0 a calibrate one?1.2 Summation of Asymptotic Series
Asymptotic series are not convergent. But they are useful for the representation ofsmooth functions. An asymptotic series can be an asymptotic expansion for functionof certain class. This is a basic idea for applications of asymptotic series for solutionsof equations.
1.2.1 Asymptotic Representation of Functions
In this section, we show that an asymptotic expansion does not determine a uniquefunction. This statement is based on the fact that any calibrate sequence does notdescribe a set of continuous functions. The calibrate sequence is not a basic set. Wecan add function 8(x) to calibrate sequence 6k(x). This new function satisfies
8(x) = o(6k(x)), ∀k ∈ ℕ, x → x0.Below we consider the most simple cases.
Example 4. We take a calibrate sequence xk on the interval x ∈ (0, x0), x0 > 0. ThenTaylor series of function exp(x) as x → 0 is an asymptotic series. But the same seriesis an asymptotic expansion for function exp(–1/x2). It means
exp(x) + exp(–1/x) ∼ ∞∑k=0
xk
k!, x → 0.
– The reason of this phenomenon is as follows: function exp(–1/x) as x > 0,x → 0 decays faster than any function of the calibrate sequence xk. The asymp-totic expansion of this function with respect to sequence xk has zero coefficients.It leads to a sum exp(x) + exp(–1/x) that has the same coefficients with respect tothe sequence xk.
Consider any calibrate sequence 6k(x) as x > 0 and x → 0. We suppose that a certainfunction is represented by
f (x) ∼ ∞∑k=0
ak6k(x), x → 0.
10 1 Asymptotic expansions and series
Definition 6. A set of functions with the given asymptotic expansion is called anasymptotic sum of series.
Example 5. Let log–k(x), k ∈ ℕ, be a calibrate sequence as x → 0. Then all analyticalfunctions in the neighbourhood of x = 0 are equivalent with respect to this calibratesequence.
1.2.2 Theorem on the Uniqueness of Asymptotic Expansion
Let function f (x) have a certain asymptotic expansion with a calibrate sequence6k(x) as
f (x) ∼ ∞∑k=0
ak6k(x), x → 0.Show that this asymptotic expansion is unique for the function.
Let another asymptotic expansion for f (x) exist:
f (x) ∼ ∞∑k=0
bk6k(x), x →∞.Then
f (x) – f (x) ∼ ∞∑k=0
ak6k(x) –∞∑k=0
bk6k(x), x →∞.The following relation
n∑k=0
ak6k(x) –n∑
k=0bk6k(x) = o(6n(x)), x →∞.
is valid for ∀n ∈ ℕ.For n = 0 we have
a060(x) – b060(x) = o(60(x)), x →∞.If a0 and b0 are constant, then a0 = b0. The induction for n = 1, 2, . . . givesan = bn, ∀n ∈ ℕ. The following statement is valid.Theorem 1. The asymptotic expansion for a function is unique with respect to the givencalibrate sequence.
1.2 Summation of Asymptotic Series 11
1.2.3 Theorem on Existence of a Function with the Given Asymptotic Expansion
Asymptotic series are not convergent. It is difficult to expect that there exists a func-tion with the given asymptotic series. Consider calibrate sequence xk, k ∈ ℕ, in theneighbourhood of x = 0. Let the following formal asymptotic series be
∞∑k=0
akxk, x > 0, x → 0. (1.6)
It is possible to construct a regular function for the given sequence {ak}∞k=0 andasymptotic series (see, e. g. [65]). It means for ∀N ∈ ℕ
f (x) –N∑k=0
akxk = o(xN), x > 0, x → 0.
This function can be constructed due to the function exp(–1/x) decays faster than anypower of x as x > 0, x → 0. This property allows to construct a function with the givenasymptotic series. But the function is represented in the form of convergent series.
Consider a series
a0 + a1x +∞∑k=2
akxk (1 – exp(– 1
2k|ak|x)) . (1.7)
It is easy to see that this series is asymptotically equivalent to eq. (1.6). Each termof eq. (1.7) differs from the term of eq. (1.6) by exp(–1/(2|ak|x)). This value is o(xk),∀k ∈ ℕ, x > 0, x → 0.
Now let’s show that series (1.7) is convergent. A relation 1–exp(–1/x) < 1/x is validas 0 < x < 1. The left-hand side is less than unity and the right-hand side is greater thanunity. To obtain a convergence of series we use a convergence of majorizing series:∞∑k=2 akxk(1 – exp(– 12k|ak|x) <
<∞∑k=2
|ak|xk 12k|ak|x
=∞∑k=2
xk–1
2k.
The majorizing series is convergent for all values of |x| < 2. It gives that the right-handside series is convergent for 0 < x < 2. Then the function
f (x) = a0 + a1x +∞∑k=2
akxk (1 – exp(– 1
2k|ak|x))
12 1 Asymptotic expansions and series
has an asymptotic series as x > 0, x → 0 of the formf (x) ∼ ∞∑
k=0akx
k.
Theorem 2. There exists a function with the given asymptotic series (1.6).
Example 1.2.1. Let us consider an asymptotic series
∞∑n=1
n!logn(x)
, x →∞and functions
f (x, k) =[log(log(x))]+k∑
n=1
n!logn(x)
, (k + 1) ∈ ℕ,where [log(log(x))] is integer part of log(log(x)).
It is easy to see
f (x, 0) ∼ ∞∑n=1
n!logn(x)
, x →∞,f (x, 1) ∼ ∞∑
n=1
n!logn(x)
, x →∞and
f (x, 0) + g ( 1x) ∼ f (x, 1), x →∞,
where g(y) is an analytic function in small neighbourhood of y = 0.
1.2.4 Problems
1. Find equivalent functions for asymptotic series with a calibrate sequence
x1–1/k, k ∈ ℕ, x → 0.2. Find equivalent functions for asymptotic series with a calibrate sequence
x–k, k ∈ ℕ, x →∞.
1.3 Laplace Method and Gamma Function 13
3. Find equivalent functions for asymptotic series with a calibrate sequence
logk(x), k ∈ ℕ, x →∞.1.3 Laplace Method and Gamma Function
Laplacemethod is one of fundamental techniques of asymptotic analysis. Thismethodis used for calculating asymptotic expansions of integrals where an integrand con-tains an exponent function:
F(+) =b∫a
f (x)e–+S(x)dx, +→∞. (1.8)Here f (x), S(x) ∈ C∞[a, b]. Integrals of such type often appear in studies of solutionsfor differential equations.
1.3.1 Asymptotic Expansion of Integral when Subintegral Function ExponentDoes Not Contain Extrema
The simplest case is when exponent into subintegral function (1.8) does not containextrema. It means S(x) ̸= 0, x ∈ [a, b]. We can perform integration by parts
F(+) =b∫a
f (x)e–+S(x)dx = – 1+f (x)S(x)e
–+S(x)ba + 1+ b∫a ddx ( f (x)S(x)) e–+S(x)dx.
If S(a) < S(b), then
F(+) ∼ 1+ f (a)S(a)e–+S(a).In other case:
F(+) ∼ – 1+ f (b)S(b)e–+S(b).One can perform integration by parts for residual integral one more time. It givescorrection term in asymptotic expansion of F(+).
1.3.2 Asymptotic Expansion of Integral, When Integrand Exponent ContainsExtrema
Integration by parts is not applied when an integration interval contains a stationarypoint of S(x).
14 1 Asymptotic expansions and series
We consider a simple case when maximum point of S(x) is inside the interval ofintegration. Denote a maximum point of function S(x) by xm ∈ (a, b). Let us supposeS(xm) ̸= 0. Select an integral over the small neighbourhood xm, x ∈ [xm – $, xm + $]:
F(+) = ∫x∈L
f (x)e–+S(x)dx +xm+$∫xm–$
f (x)e–+S(x)dx,
L = [a, xm – $] ∪ [xm + $, b].Asymptotic expansion of integral over a domain out of neighbourhood of stationarypoint xm can be evaluated by using integration by parts. Consider the method to ob-tain an asymptotic expansion of integral over the small neighbourhood of stationarypoint xm:
I(+) =xm+$∫xm–$
f (x)e–+S(x)dx.
It is convenient to change an index of exponent to –(y2 + +S(xm)). Denote
y2 = +(S(x) – S(xm)).
This transformation x → y is one-to-one correspondence in the small neighbourhoodof xm because xm is a non-degenerate maximum, then S(xm) > 0. This change ofvariables leads to
y = √+√S(xm)2
(x – xm)√1 + S(xm)3S(xm) (x – xm) + O((x – xm)2).I(+) = 1√+√ 2S(xm) D∫–D f (xm +√ 2S(xm) y√+ + O(y2+ )) × e–y2 (1 + O( y√+)) dy,
where D ∼ $√2/S(xm)/√+.Expand function f into Taylor series and substitute a segment. It gives
I(+) ∼ 1√+√ 2S(xm) f (xm)e–+S(xm) ∞∫–∞ e–y2dy.Using a well-known formula:
∞∫–∞
e–y2dy = √0,
we obtain the following theorem for asymptotics of integrals by Laplace method.
1.3 Laplace Method and Gamma Function 15
Theorem 3. Let f (x) and S(x) be from C∞[a, b] and S(xm) = 0, S(xm) > 0, xm ∈ (a, b),then
b∫a
f (x)e–+S(x)dx ∼ 1√+√ 20S(xm) f (xm)e–+S(xm). (1.9)1.3.3 Derivation of Integral Formula for Gamma Function
Let us construct an integral formula for gamma function. Denote an independentvariable by z and an unknown function by A(z). The equation for G(z) looks like theformula for factorial:
A(z + 1) = zA(z). (1.10)
For natural argument n ∈ ℕ the solution of eq. (1.10) has a property A(n + 1) ≡ n!.Our aim is to find a solution of eq. (1.10) for real value z. This equation is not
solvable in terms of elementary functions. Below we will derive well-known integ-ral formula for the gamma function and study its asymptotic behaviour by Laplacemethod.
We construct solution of eq. (1.10) in the form of Laplace integral:
A(z) =∞∫
–∞Ã(p) exp(–pz)dp.
The right-hand side of eq. (1.10) can be written in the form of
zA(z) = z∞∫
–∞Ã(p) exp(–pz)dp
= –Ã(p) exp(–pz)p=∞p=–∞ + ∞∫–∞ dÃ(p)dp exp(–pz)dp. (1.11)
This formula is valid when limits for outside the integral term exist.Suppose
limp→–∞ A(p) exp(–pz) – limp→∞ A(p) exp(–pz) = 0.
We can check this property when a solution is obtained.The left-hand side of eq. (1.10) can be written in the form of
A(z + 1) =∞∫
–∞Ã(p) exp(–pz) exp(–p)dp.
16 1 Asymptotic expansions and series
Equation (1.10) for direct image of gamma function is
Ã(p) exp(–p) = dÃ(p)dp
.
This equation can be solved easily by means of separating variables:
dÃÃ
= exp(–p)dp,
or
à = –C exp(– exp(–p)), where parameter C does not depend on p.
Let us check a property outside the integral terms in eq. (1.11), when z > 0.
limp→–∞ exp(– exp(–p)) exp(–pz) = 0;
limp→+∞ exp(– exp(–p)) exp(–pz) = 0.
It is easy to obtain an expression for an inverse image when the Laplace direct imagewas constructed:
A(z) = C∞∫
–∞exp(– exp(–p)) exp(–pz)dp.
This formula can be rewritten in short form. Change the variable of integrationt = exp(–p). It leads to
A(z) = C∞∫0
exp(–t)t(z–1)dt.
– A special solution such as C = const and
A(1) = C∞∫0
exp(–t)dt = 1
is called gamma function.Now we can write well-known integral representation for gamma function:
A(z) =∞∫0
exp(–t)t(z–1)dt. (1.12)
To check that function (1.12) satisfies eq. (1.10) one can evaluate the integral from right-hand side of eq. (1.12) through integration by parts:
A(z) = tz
zexp(–t)
t=∞t=0 + 1z ∞∫0 exp(–t)tzdt = 1zA(z + 1).
1.4 Fresnel Integral and Stationary Phase Method 17
The integral representation for gamma function allows to evaluate an asymptotic ex-pansion for gamma function as z → ∞. It is clear that this asymptotic expansion atz + 1 = n is equivalent to Moivre–Stirling formula for the asymptotic expansion offactorial.
1.3.4 Moivre–Stirling Formula
Let us evaluate an asymptotic expansion of gamma function as z →∞. It is convenientto use Laplace method. Rewrite a subintegral function in exponential form:
A(z + 1) =∞∫0
ez log(t)–tdt = |& = t/z| = zez log(z)∞∫0
d&e–z(&–log(& ))d& .
A maximum point for the index of exponent of integral is determined by
(& – log(& )) = 0, 1 – 1& = 0, &s = 1.
The asymptotic expansion of Laplace integral gives Moivre–Stirling formula or moreoften one says Stirling’s approximation:
A(z + 1) ∼ z1+z ez√20√z ,or
A(z + 1) ∼ √20z ( ze)z .
1.3.5 Problems
1. Obtain an asymptotic expansion of A(z) in the neighbourhood of z = 0 and –z ∈ ℕ.2. Calculate an asymptotic expansion of integral
2∫–2
e–+(x3/3+ax)dx, +→∞, a ∈ [–1, 1].
Find a domain of validity with respect to a.
1.4 Fresnel Integral and Stationary Phase Method
In this section we obtain formulae for Cos and Sin Fresnel integral. It is shown thatFresnel integral is a solution of differential equations of the first order. We obtain for-mulae for Fresnel integral for large value of argument. It is shown that Fresnel integralis a basis for formulae of stationary phase method.
18 1 Asymptotic expansions and series
1.4.1 Riemann Lemma
Asymptotic expansions of integrals with parameter play an important role in studiesof asymptotic expansions of solutions for differential equations. Integral of Fouriertype is one of them:
F(+) =b∫a
f (x) exp(i+x)dx.
A statement on asymptotic behaviour of integrals of any function f (x) that is integrableover [a, b] is called Riemann lemma.
Lemma 1 (Riemann lemma). Suppose f (x) ∈ L1(a, b), thenb∫a
f (x) exp(i+x)dx = o(1), +→∞.The proof of Riemann lemma is based on an approximation of integrable functions bypiecewise constant functions. Integral of piecewise constant function can be changedby a sum of integrals over segments where function is constant. Each integral in thesum is the integral of exponent. After integration each term has an order of +–1. Arequired evaluation can be obtained as a limit when a number of terms tend to infinity.
1.4.2 Fresnel Integral Formulae
The following functions are called Fresnel Cos and Sin integrals:
C(x) =x∫0
cos(t2)dt, S(x) =x∫0
sin(t2)dt.
These integrals play an important role in mathematical physics. They can be usedin the fields from diffraction theory to classical mechanics. An importance of theseintegrals depends on simplicity of these formulae. This is a general conception. Thesimplest formula is more important for applications.
Fresnel integrals can be represented by Taylor series. To obtain these formulae weexpand subintegral functions into Taylor series and integrate them term by term. Ityields
C(x) =∞∑n=0
(–1)n x4n+1
(2n)! 4n,
S(x) =∞∑n=0
(–1)n x4n+3
(2n + 1)! (4n + 3).
These series are convergent for ∀x ∈ ℂ. Fresnel integrals are entire odd functions.
1.4 Fresnel Integral and Stationary Phase Method 19
1.4.3 Large Values of Argument
First of all consider properties of Fresnel integrals for large real value of argument.Subintegral function is an alternating quantity. The integral is a sum of alternatingquantity series of area. This area is proportional to the period of integrand. The periodof oscillations tends to zero with t →∞. It leads tomembers of series that tend to zero.Liouville condition gives a convergence of series. Integrals C(x) and S(x) are boundedwith x →∞.
Evaluate a limit
C =∞∫0
cos(t2)dt.
Change variable z = t2, then
C =∞∫0
cos(t2)dt =∞∫0
cos(z)2√z dz.
It is convenient to write cos(z) = (eiz + e–iz)/2. This formula allows one to represent theintegral in the form of sum of integrals of exponents separately.
Consider an integral over close contour 𝛾 = 𝛾1 ∩𝛾2 ∩𝛾3. Here 𝛾2 is a quarter of circlewith radius R (These contours are shown on Fig. 1.2):
limR→∞( R∫
0
eiz
2√z dz +√R 0/2∫0
exp(iR exp(i6)) exp(i6/2)2
d6 +0∫iR
eiz
2√z dz) = 0.A limit for each integral exists with R→∞. It yields:
∞∫0
eiz
2√z dz = – limR→∞√R 0/2∫0
exp(iR exp(i6)) exp(i6/2)2
d6 –0∫
i∞eiz
2√z dz.R
R
γ2γ1
γ3(p)
(p)
Figure 1.2. Integral over contour line 𝛾 = 𝛾1 ∩ 𝛾2 ∩ 𝛾3 equalszero because integrand is holomorphic inside 𝛾.
20 1 Asymptotic expansions and series
Let us change variables in the latter integral iz = –y:
–0∫
i∞eiz
2√z dz = i√–i ∞∫0
e–y
2√ydy = √22 (1 + i) ∞∫0
e–y
2√ydy=√22(1 + i)
∞∫0
e–t2dt =
√24(1 + i)
∞∫–∞
e–t2dt =
√24(1 + i)√0
Consider a singular integral:
limR→∞√R 0/2∫
0
exp(iR exp(i6)) exp(i6/2)2
d6
= limR→∞
√R2
0/2∫0
exp(i(6/2 + R cos(6))) exp(–R sin(6))d6.
For ∀6 ∈ (0,0/2] the integrand is exponentially small with respect to R as R → ∞.Let’s show that a limit equals zero. We present the integral as a sum of two integrals.The first one is integral over 6 ∈ (0,R–3/4] and the second one is integral over 6 ∈(R–3/4,0/2]. Substitute integrals under limit. It yields
limR→∞√R 0/2∫
0
exp(iR exp(i6)) exp(i6/2)2
d6
≤ const limR→∞
14√R + const limR→∞√R exp(–R sin(1/ 4√R3)) = 0.
It gives
∞∫0
eiz
2√z dz = √24 (1 + i)√0.Similar calculations lead to
∞∫0
e–iz
2√z dz = √24 (1 – i)√0.Then
limx→∞C(x) =
√204
.
1.4 Fresnel Integral and Stationary Phase Method 21
A similar formula is valid for Fresnel’s Sin integral:
limx→∞ S(x) =
√204
.
1.4.4 Method of Stationary Phase
Here we show an applying of Fresnel’s integrals in studies of integrals Fourier of typefor fast oscillating functions. Consider an integral
F(+) =b∫a
f (x) cos(+K(x))dx.
We suppose that f (x) is a smooth function on a segment [a, b]. Function K(x) has onenon-degenerated stationary point xs. It means K(xs) = 0 and K(xs) ̸= 0.
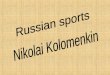
Let us discuss properties of F(+) as + → ∞. We consider a case when K ≡ x2,f (x) ≡ 1/ cosh(x+1). Figure 1.3 shows that the largest addition term to the integral goesfrom the neighbourhood of stationary point. The cause of it is a smaller frequency ofoscillations in the neighbourhood of stationary point.
Represent the integral as a sum of three integrals:
F(+) =xs–$∫a
f (x) cos(+K(x))dx +b∫
xs+$
f (x) cos(+K(x))dx
+xs+$∫xs–$
f (x) cos(+K(x))dx.
Inte
gran
d
x
Neighbourhood of stationary point
–1–0.8–0.6–0.4–0.2
00.20.40.60.8
1
–3 –2 –1 0 1 2 3
Figure 1.3. The integral is an alternating quantity series of areas for integrand cos(20x2)/ cosh(x + 1).We use + = 20 and xs = 0. It is easy to see that the largest addition term to the integral goes from theneighbourhood of stationary point. On the other side a maximum of integrand is about x = –1.
22 1 Asymptotic expansions and series
The first and the second integrals do not contain the stationary point of functionK(x).Integration by parts gives the following estimations as +→∞:
xs–$∫a
f (x) cos(+K(x))dx = f (x)+K(x) sin(+K(x))x=xs–$x=a
– 1+
xs–$∫a
( f (x)K(x)) sin(+K(x))dx.The term outside the integral has an order of +–1 at x = a. To estimate the term outsidethe integral at x = xs – $ and residual integral we use a condition K(xs) = 0. An orderof term outside the integral depends on a parameter $. Suppose $ = +–!, where ! > 0.Then
xs–$∫a
f (x) cos(+K(x))dx = O(+–1) + O(+!–1) + O(+2!–1).
The same evaluations allow to estimate the integral over x ∈ [xs + $, b].Consider an integral over a small interval in the neighbourhood of stationary
point. Change a variable in the integral +K(xs)(x – xs)2 = sgn(K(xs))y2. Supposesgn(K(xs)) = 1, then dy = √+|K(xs)|dx. Represent integrands in the form of Taylorseries with a residual term of Lagrange form:
xs+$∫xs–$
f (x) cos(+K(x))dx =
+1/2–!|K(xs)|∫
– +1/2–!
|K(xs)|
(f (xs) + f ((f )√+|K(xs)|)× cos(+K(xs) + y2 + y3√+|K(xs)|3K((K)) dy√+|K(xs)| .
Here (f and (K are parameters from [xs – $, xs + $]. Direct calculations give
xs+$∫xs–$
f (x) cos(+K(x))dx =
+1/2–!|K(xs)|∫
– +1/2–!
|K(xs)|
f (xs) cos(+K(xs) + y2)dy√+|K(xs)|+
+ O(+–1/2–!).
Suppose ! = 1/8, it yields
F(+) ∼ f (xs)√+|K(xs)| ∞∫–∞ cos(+K(xs) + y2)dy
1.4 Fresnel Integral and Stationary Phase Method 23
orb∫a
f (x) cos(+K(x))dx ∼ 1√+ f (xs)√ 20|K(xs)| (cos(+K(xs)) – sin(+K(xs))),as sgn(K(xs)) = 1.
In a case with sgn(K(xs)) = –1, the same evaluations giveb∫a
f (x) cos(+K(x))dx ∼ 1√+ f (xs)√ 20|K(xs)| (cos(+K(xs)) + sin(+K(xs))).Formulae for an integral with function sin are easy to obtain by means of reductionformulas. There are two formulae for integrals with oscillating exponent:
b∫a
f (x) exp(i+K(x))dx ∼ 1√+ f (xs)√ 20|K(xs)| exp(i+K(xs) + i0/4),as sgn(K(xs)) = 1.
In a case with sgn(K(xs)) = –1, similar manipulations giveb∫a
f (x) exp(i+K(x))dx ∼ 1√+ f (xs)√ 20|K(xs)| exp(i+K(xs) – i0/4).We obtain a formula for asymptotic of the integral by method of stationary phase:
b∫a
f (x) exp(i+K(x))dx ∼ 1√+ f (xs)√ 20|K(xs)| exp(i+K(xs) + sgn(K(xs)i0/4). (1.13)1.4.5 Problems
1. Evaluate an asymptotic expansion of Bessel function:
J-(z) =12i0 exp(i(- + 1)0/4)∫
M
exp( iz2(x – 1
x)) dx
x-+1,
where contourM is on a real axis. The contour goes around point x = 0 via a halfcircle of small radius in upper half plane.
2. Evaluate an asymptotic expansion of Pearcey [133]:∫ℝexp(i("4/8 – x"2/2/3 + y"))d", x →∞, y→∞.
24 1 Asymptotic expansions and series
1.5 Airy Function and Its Asymptotic Expansion
Here we discuss Airy function as a special solution of differential equation. We re-duce an integral formula for the function and study properties of the function for largevalues of argument.
1.5.1 Airy’s Equation
Airy’s equation is following ordinary differential equation of second order:
u – zu = 0. (1.14)
General solution of this equation oscillates as z < 0 and exponentially grows as z > 0.It is easy to explain such properties if one studies an equation with fixed parameterinstead of the varying parameter z. Solutions of equation
v – Zv = 0, Z = const, (1.15)are essentially dependent from a sign of parameter Z. The solutions oscillate with afrequency √–Z when Z < 0. Otherwise when Z > 0 there are two linear independentsolutions, one of them grows exponentially and another one decays exponentially.It is reasonable to expect the same behaviour for a solution of Airy equation on theintervals z < 0 and z > 0.
Airy equation is often used as a model for mathematical simulation to describe atransition from light zone to shadow zone in wave optics and other problems.
1.5.2 An Integral Representation of General Solution for Airy Equation
A solution of Airy equation can be represented in an integral of Laplace type. Let usconsider:
u(z) = ∫𝛾ũ(p) exp(pz)dp.
Here 𝛾 is an unknown contour of integration. We choose this contour according to twoconditions. The first condition is that the integral should be convergent. The secondone is that the integral does not equal to zero. The contour will be determined afterobtaining an explicit form for ũ(z). Substitute the formula for u(z) into Airy’s equation.We suppose that a differentiation is possible under the integral sign:∫
𝛾p2ũ exp(pz)dp – z∫
𝛾ũ exp(pz)dp = 0.
It is convenient to remove a factor z via integration by parts:
z∫𝛾ũ exp(pz)dp = ũ exp(pz)|𝛾+𝛾– – ∫𝛾 ũ exp(pz)dp.
1.5 Airy Function and Its Asymptotic Expansion 25
Points 𝛾± are initial and end one of integration contour. We suppose that a sum ofterms outside the integral equals to zero. It is possible when the contour is close orfunction ũ(p) exp(pz) equals to zero at these points. It yields∫
𝛾(p2ũ + ũ) exp(pz)dp = 0.
The integral equals to zero when an expression in brackets equals to zero. It followsthat
p2ũ + ũ = 0.This equation can be easily integrated:
dũũ
= –p2dp.
or
ũ = C exp(–p3/3).
It leads to an integral expression:
u(z) = C∫𝛾exp(pz – p3/3)dp.
Now we know an explicit form of integrand. Let us choose a contour of integration.The integrand is holomorphic in complex plane. On Cauchy theorem an integral overa closed contour inside the bounded domain of complex plane equals zero. Therefore,to obtain non-trivial solution for Airy’s equation we choose a contour going throughinfinity. It is important to find a direction to infinity on the complex plane.
The integral is convergent whenR(p3) < 0 as p→∞. It means the contour shouldgo to infinity inside sectors –0/6 < arg(p) < 0/6, 0/2 < arg(p) < 50/6 and 70/6 < arg(p) <100/6. A contour of integration can be shrank to a point when both branches go toinfinity through one sector. Such integrals equal to zero. To represent a non-trivialsolution we choose contours that are going to infinity through two different sectors(see Figure 1.4).
Consider the integral over contour 𝛾3. This contour is equivalent to an integralover image axis. Then
u(z) = Ci∞∫
–i∞exp(pz – p3/3)dp.
Change a variable of integration p = ik. It yields
u(z) = iC∞∫
–∞exp(i(kz + k3/3))dk.
26 1 Asymptotic expansions and series
γ3γ2γ1 (p)
(p)
Figure 1.4. Curves 𝛾1, 𝛾2, 𝛾3 are contours ofintegration that lead to non-trivial Laplaceintegrals.
The image part sin(kz + k3/3) of integrand is an odd function with respect to k. Theintegral of it equals to zero. The real part cos(kz+k3/3) of integrand is evenwith respectto k. It yields
u(z) = 2iC∞∫0
cos(kz + k3/3)dk.
Show that the integral is convergent. Represent it as a sum of integrals:
u(z) = 2iC√|z|+1∫0
cos(kz + k3/3)dk + 2iC∞∫
√|z|+1cos(kz + k3/3)dk.
The first integral is bounded for z ∈ ℝ and z ̸= 0. Consider the second one:I(z) = 2iC
∞∫√|z|+1
cos(kz + k3/3)dk.
Integrate it by parts:
I(z) = 2iC∞∫
√|z|+1cos(kz + k3/3)dk = 2iC cos(kz + k
3/3)z + k2
k=∞k=√|z|+1+ 2iC
∞∫√|z|+1
2k(z + k2)2
sin(kz + k3/3)dk.
1.5 Airy Function and Its Asymptotic Expansion 27
The last integral is absolutely convergent. The term out of integral equals zero atk =∞. It gives that the integral I(z) is bounded and the integral u(z) is bounded too.
Let us choose C = 1/2i0. As a result we obtain a formula for Airy’s function:
Ai(z) = 10
∞∫0
cos(kz + k3/3)dk.
This function is a solution of the Cauchy problem for Airy’s equation with an initialcondition:
u(0) = 10
∞∫0
cos(k3/3)dk, u(0) = 0.
A value of the Airy function at z = 0 is represented by gamma function:
10
∞∫0
cos(k3/3)dk = 10
∞∫–∞
(exp(ik3/3))dk.
Denote k3/3 = t. It gives k2dk = dt or dk = dt/(3t)2/3, then
120
∞∫–∞
exp(ik3/3)dk = 12032/3
∞∫–∞
exp(it)t2/3
dt.
Now the integral with respect to t can be represented as an integral over an imaginaryaxis: 4 = it, then
u(0) = 12032/3
i∞∫–i∞
exp(–4)(i4)2/3
d(i4) = i0(3i)2/3
i∞∫0
exp(–4)42/3
d4,
or
u(0) = –10(3)2/3
i∞∫0
exp(–4)42/3
d4 = –10(3)2/3
A(1/3).
Another linear independent solution with respect to Ai(z) is obtained from a sum ofintegrals over the contours 𝛾1 and 𝛾2:
u(z) =C∫𝛾1exp(pz – p3/3)dp + C∫
𝛾2exp(pz – p3/3)dp = 2C
∞∫0
exp(pz – p3/3)dp
+ C–i∞∫0
exp(pz – p3/3)dp + Ci∞∫0
exp(pz – p3/3)dp.
28 1 Asymptotic expansions and series
Let us change a variable of integration in second and third integrals from the right-hand side of this formula p = ik. As a result we get
u(z) = 2C∞∫0
exp(pz – p3/3)dp + 2C∞∫0
sin(kz + k3/3)dk.
The Airy Bi(z) integral is
Bi(z) = 10
∞∫0
( exp(pz – p3/3) + sin(pz + p3/3))dp.1.5.3 Asymptotic Expansion for the Airy Function as z → –∞Asymptotic expansion for the Airy function as z → –∞ can be evaluated bythe method of stationary phase. To obtain the expansion one should select a fastoscillating exponent from integrand:
Ai(z) = 10
∞∫0
cos(kz + k3/3)dk = |k = √–z*|=√–z0
∞∫0
cos((–z)3/2(–* + *3/3)d*.
We write cosine via oscillating exponents:
Ai(z) = 10√–z2
∞∫0
exp(i(–z)3/2(* – *3/3))d*
+ 10√–z2
∞∫0
exp(–i(–z)3/2(* – *3/3))d*.
Stationary point of the phase is
(–* + *3/3) = 0 – 1+ *2 = 0, *s = ±1.The point *s = 1 lies in the domain of integration. A formula for asymptotic expansionof integrals gives
Ai(z) ∼ 10 √–z2 14√–z3√202 exp(2i(–z)3/2/3 – i0/4)+ 10
√–z2
14√–z3√202 exp(–2i(–z)3/2/3 + i0/4),
1.5 Airy Function and Its Asymptotic Expansion 29
or
Ai(z) ∼ 14√–z√0 cos(2(–z)3/2/3 – 0/4), z → –∞. (1.16)When z → ∞ the integral for the Airy function does not contain stationary points.Therefore, one can integrate them by parts:
Ai(z) =√z0
∞∫0
cos(z3/2(* + *3/3))d* = √z0 sin(z3/2(* + *3/3))z3/2(1 + *2) ∞0– 10√z ∞∫
0
–2* sin(z3/2(* + *3/3))(1 + *2)2 d* = ⋅ ⋅ ⋅ = o(z–n/2), ∀n ∈ ℕ, z →∞.
It means, the Airy function is less than any negative power of z as z →∞.1.5.4 Saddle-Point Method and the Airy Function Asymptotic Expansion as z →∞An asymptotic expansion of the Airy function can be evaluated using the Cauchytheorem on integrals of holomorphic functions and Laplace method. This method iscalled saddle-point method. This method can be applied for integrals of the followingtype:
F(+) = ∫L
f (z)e–+S(z)dz, +→∞.The contour of integration can be deformed when an integrand is holomorphic inthe neighbourhood of L . Due to the Cauchy theorem the value of integral does notchange.
Let us construct a contour of integration so that the exponential function decaysas soon as possible. It allows to simplify calculations.
It is sufficient to change integration path in shape so that it goes through saddlepoint. This point is an extrema point for function S(z) in complex plane. This way isused to obtain the Airy function expansion as z →∞.
It is convenient to rewrite an integral representation for the Airy function in theform of integral of oscillating exponent:
Ai(z) = 10
∞∫0
cos(kz + k3/3)dk = 120
∞∫–∞
ei(kz+k3/3)dk.
We select a large parameter in exponent:
Ai(z) =√z20
∞∫–∞
eiz3/2(*+*3/3)d*.
30 1 Asymptotic expansions and series
The extrema point of this exponent isdSdz
= 0, 1 + *2 = 0, *s = ±i,as k = ±i√z.
A real part of exponent of integrand is positive when a contour of integrationmoves to low half part of complex plane. The index of exponent iz3/2S(–i) = 2z3/2/3is positive at *s = –i. The real part of index of exponent is negative iz3/2S(i) = –2z3/2/3when a contour of integration moves to upper half part of complex plane.
To evaluate the integral expansion we shift an integration parameter k = i√z + '.It yields
Ai(z) = e–2z3/2/3
20
∞∫–∞
e–√z'2+i'3/3d'.
Formula (1.9) yields
Ai(z) ∼ e–2z3/2/32√0 4√z , z →∞. (1.17)
1.5.5 Problem
– Construct an asymptotic expansion for the Airy function in complex plane alonghalf lines z = Rei!, R→∞, ! ∈ [0, 20).
1.6 Functions of Parabolic Cylinder
In this section we derive an integral representation for solutions of parabolic cylin-der equation and show connection formulae for parabolic cylinder functions withdifferent values of parameter.
1.6.1 Parabolic Cylinder Equation
A canonical form of parabolic cylinder equation is
y – (x24+ a)y = 0. (1.18)
Here x is an independent variable and a is a parameter. This equation with a frozenlarge coefficient x → X = const has two independent solutions. The first solutiongrows with respect to x and the second one decays for large value of x.
Parabolic cylinder equation can be written in another form:
y + (x24– a)y = 0.
1.6 Functions of Parabolic Cylinder 31
Solutions for this equation oscillate at large real values of x. Equation of the first formtransfers to the second form through substitution:
x → x exp(i0/4), a→ –ia.Below we study solutions for parabolic cylinder equation written in the first form.Solutions of equation of the second form can be obtained by the given substitution.
Parabolic cylinder equation was obtained by separating variables method. Thisform of equation is related to a system of cylinder coordinates with the parabola inthe bottom. It was found that parabolic cylinder equation plays an important role inquantummechanics, oscillation theory and studies of the Painlevé equation.
1.6.2 Integral Representation
To obtain an integral representation for the solution of parabolic cylinder equation, itis convenient to change a required function:
y = exp(–x2/4)u.
Substitute this formula into equation (1.18). It gives an equation for u:
u – xu – ( 12+ a)u = 0.
This equation is more convenient because it contains the first order of independentvariable. It allows to obtain the first-order equation for the Laplace image and tointegrate it.
We construct a solution u in the form of
u(x) = ∫𝛾exp(kx)ũ(k)dk.
This formula contains an unknown Laplace image ũ(k) and unknown contour ofintegration in complex plane k.
We carry out formal calculations and suppose that they are valid. We justify allmanipulations when Laplace image ũ and contour 𝛾 of integration are determined.
Evaluate formulae for the first and the second derivatives with respect to x:
ddx∫𝛾exp(kx)ũ(k)dk = ∫
𝛾k exp(kx)ũ(k)dk.
d2
dx2∫𝛾exp(kx)ũ(k)dk = ∫
𝛾k2 exp(kx)ũ(k)dk.
32 1 Asymptotic expansions and series
Substitute these formulae for equation and bring all terms under integral sign:∫𝛾(k2ũ(k) – xkũ(k) – ( 1
2+ a)ũ(k)) exp(kx)dk = 0.
All terms besides –xkũ(k) in round brackets only depend on variable k. Transform theintegral of this term by parts to remove a variable x:
–∫𝛾(xkũ(k)) exp(kx)dk = –kũ(k) exp(kx)
𝛾+𝛾– + ∫𝛾 (ũ(k) + kũ(k)) exp(kx)dk,where 𝛾± are initial and finishing points for contour 𝛾. We suppose that contour 𝛾 issuch that a sum of integral terms equals to zero. It yields:∫
𝛾(k2ũ(k) + ũ(k) + kũ(k) – ( 1
2+ a)ũ(k)) exp(kx)dk = 0.
The integral equals zero when an integrand equals zero. This condition gives adifferential equation:
k2ũ(k) + kũ(k) + ( 12– a)ũ(k) = 0.
Solution of this equation is ∫ dũũ
= ∫ –k2 + (a – 12)k
dk,
or
ũ = C exp(–k22) ka–1/2.
The solution can be represented in the form of
y = C exp(–x2/4)∫𝛾exp(kx – k2
2)ka–1/2dk.
Let us choose the contour of integration. The integrand has a singular point at x = 0 asa < 1/2. Determine a domain where the index of exponent has a negative real part. Letk = .+i+, thenR(–k2) = +2– . 2. It givesR(–k2) < 0 as +2 < . 2. Any contour that containspoint at infinity and goes through the sector 30/4 < arg(k) < 50/4 from infinity andgoes back through –0/4 < arg(k) < 0/4 can be considered as 𝛾. This contour does notinclude point k = 0. The Cauchy theorem states that these contours are equivalentlyaccurate to a loop around k = 0 that goes from infinity point under I(k) = 0 axis andgoes back over I(k) = 0 axis. Denote a loop on Figure 1.5 by 𝛾.
1.6 Functions of Parabolic Cylinder 33
γ(p)
(p)
Figure 1.5. An integration over loop 𝛾. The contour indents the point of branching z = 0 and goesunder and over a cross-cut R(z) < 0 that connects the point of branching z = 0 and infinity point.
A point x = 0 is a pole of n + 1th order as a = –n + 1/2, n ∈ N andy(x) = C exp(–x2/4)∫
𝛾exp(kx – k2
2)k–ndk
= C exp(x2/4)∫𝛾exp( – x2
2+ kx – k
2
2)k–ndk
= C exp(x2/4) resx=0( exp( – 1
2(x – k)2)k–n)
= C(–1)n exp(x2/4)
n!dn
dxnexp(–x2/2).
It is convenient to multiply the solution by A(1/2 – a) to withdraw the n! in the lastformula. So we determine a parabolic cylinder function by classical notations [1]
U(a, x) = D–a+1/2(x) =A(1/2 – a)
20i exp(–x2/4)∫
𝛾exp(kx – k2
2)ka–1/2dk
and
Dn(x) = (–1)n exp(x2/4) d
n
dxnexp(–x2/2).
1.6.3 Connection Formulae at Different Values of Parameter
Let us consider properties of the functions when (a+1/2) ∈ ℕ. For such values of para-meter the function is represented by two multipliers: one of them is an integral overthe loop and another one is a A(1/2 – a). On Cauchy’s theorem the integral over suchloop is equal to zero. But the gamma function has a pole of the first order. Therefore,we get the indetermination infinity times zero. To find an answer we need additionalstudies. It is convenient to use connection formulae of parabolic cylinder functions fordifferent values of parameter a.
A formula is valid: ∫𝛾
ddk( exp(kx – k2
2)ka–1/2)dk = 0.
34 1 Asymptotic expansions and series
Then ∫𝛾(x exp(kx – k2
2)ka–1/2 – k exp(kx – k2
2)ka–1/2
+ (a – 1/2) exp(kx – k22)ka–3/2)dk = 0.
Represent the integral as a sum of two integrals. Multiply it by a factorA(1/2 – a) exp(x2/4)/(20i). It yields [162]
xU(a, x) – A(1/2 – a)A(1/2 – (a + 1))U(a + 1, x) +(a – 1/2)A(1/2 – a)A(1/2 – (a – 1)) U(a – 1, x) = 0.
Using a property of gamma function we obtain
xU(a, x) – (1/2 – a)U(a + 1, x) – U(a – 1, x) = 0.
This formula allows one to calculate values of parabolic cylinder functions as(a + 1/2) ∈N.1.6.4 Values at Origin of Coordinates
To connect an integral formula for parabolic cylinder function with its Taylor expan-sion in the neighbourhood of x = 0, we evaluate the value of integral as a > –1/2. Forthe given value of parameter a the integral over a loop is represented as an integralover a small radius circle around the origin of coordinates and upper and lower sidesof crosscut. The argument of integration variable is different for upper and lower sidesof crosscut:
U(a, 0) = A(1/2 – a)20i ∫𝛾 exp( – k22 )ka–1/2dk
=k = |k| exp(i arg(k)), |k| = 1, arg(k) = ±i0
= A(1/2 – a)20i 2i sin(0(a – 1/2))
∞∫0
exp(–12/2)1a–1/2d1 =12/2 = +
= 2a/2–1/4 A(1/2 – a)0 sin(0(a – 1/2))∞∫0
exp(–+)+a/2–3/4d+
= 2a/2–1/4 A(1/2 – a)0 sin(0(a – 1/2))A(a2 + 34) = 2a/2–1/4 A( a2 + 34)A(a – 12) ;
1.7 WKB Method 35
Here we use A(1 – z)A(z) sin(0z) = 0. Similar evaluations for derivatives give
U(a, 0) = A(1/2 – a)20i ∫𝛾 exp( – k22 )k(a+1)–1/2dk
= 2a/2+1/4A( a2 + 54)A(a – 12) .
1.6.5 Problems
1. Obtain an asymptotic expansion of U(a, x) as x →∞ and a ∈ ℝ.2. Define an interval of validity for asymptotic expansion of the above problem for
large a.3. Discuss the asymptotic expansion for x ∈ ℂ as |x|→∞ and a→∞.1.7 WKB Method
This methodwas created for construction of fast oscillating asymptotic expansions forlinear ordinary differential equations. Later it was modified for linear partial differen-tial equations. It allows one to construct a quasi-classical approximation for solutionsof Schroödinger equation [111]. It was also developed in studies of diffraction of shotwaves.
WKB method is called in honour of Wentzel, Kramers and Brilluen. They used aspecialmethod for construction of an asymptotic expansion of fast oscillating solutionfor Schrödinger equation [21, 101, 159]. But similar approach was applied earlier byLiouville and Green in 1837 [56, 106]. Sometimes mathematicians call this method asLiouville–Green method [132].
1.7.1 Application of WKB Method for Ordinary Differential Equationof the Second Order
WKB method can be used for construction of fast oscillating solutions for differentialequations of certain order. An application for system of equations is developed in Ref.[158]. In this section, we demonstrate main ideas of WKBmethod to solve an equationof the second order.
Consider a differential equation of the second order with a small parameter :2under the second derivative
:2u + q(x)u = 0. (1.19)
36 1 Asymptotic expansions and series
We use a square of small parameter for convenience only. Change a variable x to fastvariable . = (x – X)/:, where X is a fixed real point. The equation takes a form of
d2ud. 2 + q(X + :. )u = 0.
Let : = 0 . In this case the equation has two linear independent oscillating solutionsas q(X) > 0 and exponentially growing and decaying solutions as q(X) < 0. It is easy toobtain for q(X) > 0:
u ∼ c1 exp(i√q(X).) + c2 exp(i√q(X).) , c1,2 ∈ ℝ.This formula is an approximation in the small neighbourhood of X with respect to x.
To construct approximations that are uniformly suitable for a bounded interval ofindependent variable x we suppose:– first, q(x) > 0, this allows us to consider oscillating solutions of eq. (1.19) only;– second, the function q(x) is infinitely smooth.
The infinite smoothness is important for construction of asymptotic series for lin-ear independent solutions of eq. (1.19). To construct a segment of series, the finitesmoothness for the function is sufficient.
We construct an asymptotic approximation of solution for eq. (1.19) in the form of
u = exp(iS(x)/:)A(x).
Substitute this formula into the equation. Some calculations give
–(S)2 exp(iS(x)/:) + iS exp(iS(x)/:)A + 2i:SA exp(iS(x)/:)+ :2 exp(iS(x)/:)A + q(t) exp(iS(x)/:)A = 0.
We can remove the exponent. It yields
–(S)2 + q(x) + :(iSA + 2SA) + :2A = 0.
Relations under :0 and :1 give two equations:
S = ±√q(x) and SA + 2SA = 0.These equations are easily integrable:
S = ±∫√q(x)dx, A = 14√q(x) .
1.7 WKB Method 37
The function is called WKB approximation:
u0(x, :) =exp( i: ∫√q(x)dt)
4√q(x) ,which satisfies eq. (1.19) up to :2 terms:
:2u0 + q(x)u0 = :2exp( i: ∫√q(x)dx) (4qq – 5(q)2)
16 4√q9 .The formula for u0 is WKB approximation.
Let us construct a whole asymptotic expansion for solution
u ∼ exp( i: ∫√q(x)dx)4√q(x) (1 + ∞∑n=1 :nAn(x)) . (1.20)Substitute the series into equation and collect terms at similar powers of parameter :.It leads to a recurrent system of equations for coefficients An:
iA1 = (4qq – 5(q)2)32√q5 ;
iAn =(4An–1qq – 5(q)2An–1 + 8qqAn–1 – 16q2An–1)
32√q5 , n > 1.The equation for An is easily integrable. It is possible to construct a series with respectto powers of :.
Coefficients of this series have singularities at x0, where q(x0) = 0. The order ofthe singularities grows with the growth of number of correction term. For this causethe constructed series is not valid in the small neighbourhood of point x0.
Suppose that function q(x) has a null of the kth order at x0. It means q(x) = O((x – x0)k). Then the coefficient A1 has a singularity of 1 + k/2 order at this point.Integration gives the order of nth correction term of asymptotic series:
An = O((x – x0)–(nk)/2–n).
The condition of validity for series (1.20) is
:An(x)An–1(x)
= o(1), :→ 0.
38 1 Asymptotic expansions and series
The constructed asymptotic series is valid as :–2k+2 (x – x0) ≫.
The similar calculations give an asymptotic expansion for the term with complexconjugate exponent. The general solution has an asymptotic expansion:
u ∼ C1 exp( i: ∫√q(x)dx)4√q(x) (1 +∑∞n=1 :nAn(x))+ C2
exp(– i: ∫√q(x)dx)4√q(x) (1 +∑∞n=1 :nAn(x)) . (1.21)
Remark 1. WKB formulae can be used for constructing non-oscillating asymptoticseries as q(x) < 0. An asymptotic formula for the decaying solution is essentially lessthan a measure of inaccuracy for asymptotic formula for exponentially growing solu-tion. Therefore, in this case, the formula with growing asymptotic expansion is usedfor asymptotic approximations. The formula for general solution (1.21) has no sensewithout additional arguments, when q(x) < 0.
1.7.2 Justification of Constructed Asymptotic Expansion
The whole asymptotic series (1.20) is not usually used. Instead of them a segment ofseries is taken into account for approximation. Denote by
uN =exp( i: ∫√q(x)dx)
4√q(x) (1 + N∑n=1 :nAn(x)) .To show that the formula gives one an asymptotic approximation for the solutions, weconstruct a solution in the form of
u = uN + :N+1v.
Substitute the solution into original differential equation. It gives an equation for aresidue term v:
:2v + q(x)v = :2FN .Here
FN = –AN
4√q(x)e i: ∫ 4√q(x)dx.Rewrite the second-order differential equation as a system of the first-order equations:( :v1
:v2) = ( 0 1
–q(x) 0)( v1
v2) + :2 ( 0
FN(x)) .
1.7 WKB Method 39
An asymptotic solution for differential equation gives a fundamental solution forhomogeneous system up to :2 order:
R(x, :) =( exp(iS/:)4√q exp(–iS/:)4√q(4iSq – :q) exp(iS/:)4 4√q5 (–4iSq – :q) exp(–iS/:)4 4√q5 ) .
A determinant of matrix is det(R) = –2i.We construct a solution in the form of
v = RB, B = (B1(x, :),B2(x, :))T ,
where B is an unknown function.Substituting u into the system of equations yields
:RB = :2IB + :2FN , where :2I = QR – :R.Here
Q = ( 0 1–q(x) 0
) .It is easy to obtain the Volterra integral equation for vector B:
B = :x∫x1
R–1IBdy + :x∫x1
R–1FNdy,
where x1 is a constant such that q(x1) > 0. Inverse matrix R–1 is easily constructed
R–1(x, :) =(–i (4iSq + :q) exp(–iS/:)8 4√q5 –iexp(–iS/:)2 4√q–i (4iS
q – :q) exp(iS/:)8 4√q5 iexp(iS/:)2 4√q ) .
Denote a norm in a space of continuous functions by || ∙ ||. Let q(x0) = 0 and supposethat q(x) > 0 as x > x0. Suppose that the integral equation has a solution in the spaceof continuous vector functions. Then it is easy to obtain inequality for ∀x > x0:
||B|| ≤ : x∫x1
D||B||dy + :PN ,
where D,PN = const, so that D > ||R–1(x)I(x)|| and PN > ||FN(x)|| as ∀x > x0.
40 1 Asymptotic expansions and series
The known Grönwall’s lemma gives that ||B|| is bounded on an interval x ∈(x0, c:–1) as ∀c > 0. The residue term satisfies :N+1v = O(:N+1) when x changes onconsidered interval.
Show that WKB asymptotic expansion is an approximation for the solution on theinterval :–1/(k+2)|x – x0| ≫ 1.
Estimate an order of ||FN || in the small neighbourhood of x0:
||FN || ≤ O((x – x0)–k/4)||AN || ≤ O((x – x0)–k/2– Nk2 –N–2).An upper estimation for ||R–1|| is
||R–1|| = O((x – x0)–k/4) + O(:(x – x0)–
k4 –1).
An estimation for :2I = QR – :R is
||:2I|| = O(:2 (
14√q 14√q
4iq3/2 – :q4√q5 –4iq3/2 – :q4√q5 )
)≤ :2O((x – x0)–k/4–1) + :3O((x – x0)–k/4–2).
Consider a sequence
B0 = :x∫x1
R–1FNdy,
Bn+1 = :x∫x1
R–1IBndy + :x∫x1
R–1FNdy.
The sequence {Bn}∞n=0 belongs to a space of bounded differentiable vector functionsas :–
2k+2 |x – x0| ≫ 1. Estimate the norm of difference between two nearest-neighbour
elements of sequence
||Bn+1 – Bn|| ≤ : x∫x1
||R–1I(Bn – Bn–1)||dy
≤ :||Bn – Bn–1|| x∫x1
||R–1||||I||dy ≤ :||Bn – Bn–1||C× x∫x1
((y – x0)–k/4) + :(y – x0)–
k4 –1)((y – x0)
–k/4–1) + :(y – x0)–k/4–2)dy≤ :||Bn – Bn–1||C1((x – x0)–k/2) + :(x – x0)– k2 –1 + :2(x – x0)–k/2–2)≪ (:1+ 2k+2 (–k/2) + :2+ 2k+2 (–k/2–1) + :3+ 2k+2 (–k/4–2))C2||Bn – Bn–1||.
1.7 WKB Method 41
It yields
||Bn+1 – Bn|| ≪ C2||Bn – Bn–1||, :– 2k+2 |x – x0| ≫ 1, :→ 0.The sequence converges for the given interval of x.
The main result of this section is
v = o(:N AN4√q ) , :– 2k+2 |x – x0| ≫