Embed Size (px)
Citation preview

ALIGNING A RAW IMAGE TO A REAL TIME COORDINATE
SYSTEM ON THE WEB
Aniket PhatakUNI: avp2110

TOPICS COVERED
Image Search Engine Results now Focus on GIS image registration The Technique and its advantages Internal working Sample Results Applicable to other areas like face
recognition etc. Future scope

IMAGE SEARCH ENGINE RESULTS NOW

CURRENT IMAGE SEARCH TECHNIQUE Image search is a complex and costly task Hence, present web search engines query
the title or the metadata of the image to get results faster.
Adversarial attack is the huge problem associated with above technique
Hence, we need to devise some algorithm that can some significant pixels in image for image comparison
Focus now is on Web-based georeferencing.
GEOGRAPHIC IMAGES ON WEB
Google Earth and corresponding maps.google.com has set high standards for all web applications and websites dealing with high resolution/high accuracy geographical feature content. It can be used using APIs.
The programming environment of Flex SDK and corresponding scripting language Actionscript v3.0 embedded in Adobe Flash CS3 has enabled the use of Google Maps library in Flash Applications.
Required for this:- High Internet speeds Geo-referencing

HOLISTIC VIEW OF PROCESS
Using Principal Component Analysis(PCA) technique, the most similar image from the database is selected.
Now some specific significant pixels named Control Point Pairs(CPPs) are selected for image registration automatically.
Next time, for image registration and georeferencing on any other server, we just need to pass these CPPs instead of whole image.

INTRODUCTION
Aligning a raw image with a real world map coordinate system.
Raw Image Real World Map

LAYERS ON IMAGES

GEO-REFERENCING PROCESS
Spatial datasets from different sources need to be accurately aligned geographically in order to be viewed or analyzed together

GEOREFERENCING PROCESS
Georeferencing is one of the vital research areas of GIS data integration literature. Geospatial information needs to be extracted from multiple sources in a very consistent and precise way. The typical Georeferencing process includes:
Identifying a set of control point pairs that link locations on a raster image with corresponding locations on a correctly positioned vector dataset.
Calculating a transformation function from a raster image to the vector map based on the Control Point Pairs (CPPs).
Transforming and re-sampling the image.

SYSTEM DIAGRAM

ISSUES
Manually Finding CPPs is
Time consuming
Tedious
Sometimes impossible
Must know a priori approximate location
Distorted and Transformed images makes it even
harder to identify the location.

SOLUTION
AUTOMATED GEO-REFERENCING
Requires no pre knowledge of the image’s placement
in the road network.
Necessitates only a few points from the image.
Tolerates point location distortion , missing points
and spurious points
Provides high performance and scalability

IMAGE ENHANCEMENT
Process by which an image is manipulated to increase the amount of information perceivable by the human eye.
Inputs: neighborhood pixels, intensity, gray level values .
Outputs: enhanced (smoothened) image . Algorithms : delta-connected components,
symmetric neighborhood filters .

IMAGE SEGMENTATION
Process of partitioning the image into non
overlapping regions according to gray level,
texture etc
Single priority queue

IMAGE REGISTRATION
Process of overlaying two or more images of the same scene taken at different times, from different from different view points.
Geometric alignment of images. Correlation function used for feature matching. Comprises of:1. Feature detection.2. Feature matching.3. Transformations.

IMAGE REGISTRATION
INPUT IMAGEDATABASE REFRENCE IMAGE
Image Registration Algo

IMAGE REGISTRATION AND TRANSFORMATIONS
AFFINE TRANSFORM PIECEWISE LINEAR
LWM TRANSFORM PROJECTIVETRANSFORM
INPUT IMAGE
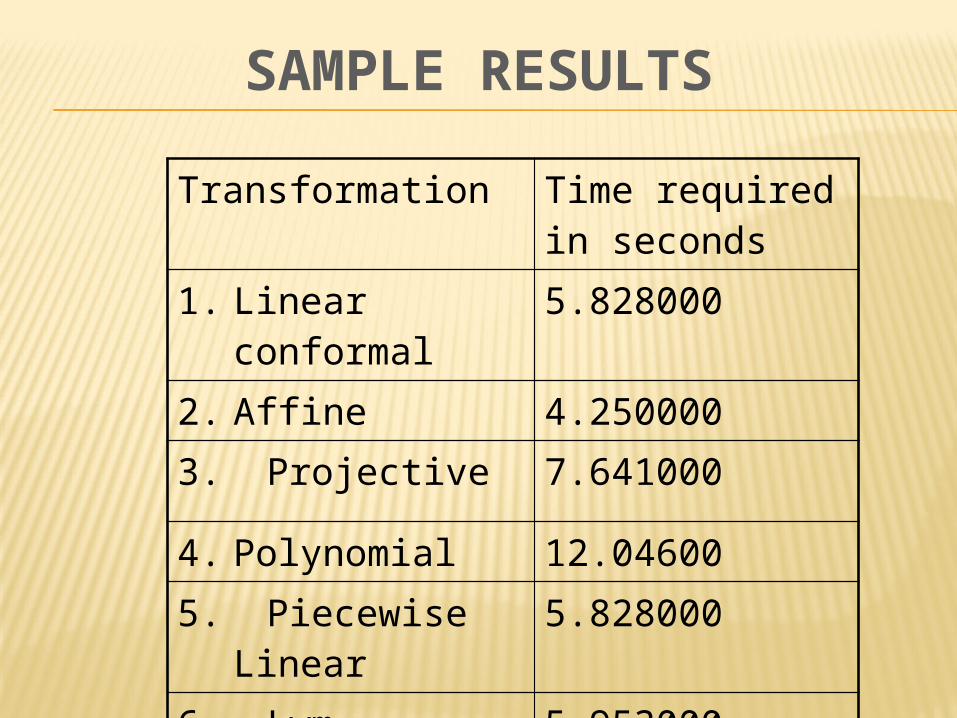
Transformation Time required in seconds
1. Linear conformal 5.828000
2. Affine 4.250000
3. Projective 7.641000
4. Polynomial 12.04600
5. Piecewise Linear 5.828000
6. Lwm 5.953000
SAMPLE RESULTS

LIMITATIONS
Only spatial datasets from different sources are
considered.
A minimum of 4 control points in image is
required for matching.
Pattern matching is currently only being done on
point data.
FUTURE SCOPE
Easily extended to other image matching
applications like face recognition etc.
Natural Disaster management.
Implementing GIS Applications and Pattern
Matching for paleontological classification of
ammonitic suture.
Housing Stock surveys.

CONCLUSION
An image search engine can use this algorithm to avoid storing
various copies of same image location.
It can register images from different sources and align them
without actually comparing them pixel by pixel each time which
is time consuming and costly process.
Easily scalable architecture and more suitable for distributed
environment where network bandwidth is precious.
Removes manual human intervention and thereby any
possibility of human error in image matching.

THANK YOU





























