Embed Size (px)
Citation preview
การทดสอบการสน
เรยบเรยงโดย เจมธง ปรารถนารกษ
สาขาวชา วศวกรรมเครองกล
กลาวน า การเคลอนทไปมาของวตถรอบจดสมดลในชวงหนง ไมวาการเคลอนทนนจะเกดขนใน
แบบซ าตวเองหรอไมกตาม เราเรยกการเคลอนทนวา การสน (Vibration) หรอการแกวง (Oscillation) เชน การแกวงไป–มาของชงชา หรอลกตมนาฬกา การเคลอนทของลกสบในเครองยนต เปนตน การสนของวตถตางๆ ทเกดขน มทงทกอใหเกดประโยชนและทท าใหเกดโทษ ดงนน การศกษาเรองการสนทางวศวกรรม เปนการศกษา เพอใหวศวกรมความเขาใจถง การสนทเกดขนวามลกษณะเฉพาะอยางไร มวธการหลกเลยงปองกน รวมถงการวดและควบคมการสนทเกดไดอยางไรบาง โดยทวไปจะแบงการสนสะเทอนออกเปน 2 กรณ คอการสนแบบอสระ (Free Vibration)
และการสนแบบบงคบ (Force Vibration) ส าหรบในการทดลองนกศกษาจะไดศกษาระบบทประกอบดวย มวล-สปรง-ตวหนวง โดยนกศกษาจะไดเหนพฤตกรรมของระบบเมอเกดการสน การท าการวด และการควบคมการสน ซงนกศกษาจะตองมความรพนฐานในรายวชาการสนทางวศวกรรม เพอสามารถค านวณและวเคราะหการสนทเกดขนได
การสนของระบบหนงล าดบขนความเสร ปรากฏการณการสนสะเทอนจะเกยวของกบการเปลยนรปไปมาระหวางพลงงาน ส าหรบ
ระบบทมการสนสะเทอนนนจะมองคประกอบส าคญ คอ องคประกอบทสะสมพลงงานศกย องคประกอบทสะสมพลงงานจลน และองคประกอบทหนวงใหพลงงานของระบบลดลง ซงการเปลยนรปไปมาของพลงงาน จะท าใหเกดการเคลอนทและการเคลอนทนจะกอใหเกดการสนสะเทอนขน กลาวคอ เมอมการสะสมพลงงานศกยขนในระบบ พลงงานน จะถกเปลยนเปนพลงงานจลน ซงอยในลกษณะการเคลอนทของมวลในระบบ และการเคลอนทนจะกอใหเกดการสะสมพลงงานศกยขนอก เปนเชนนไปเรอยๆ สวนองคประกอบทหนวงพลงงาน ของระบบนน กจะเปลยนพลงงานศกยและพลงงานจลนของระบบใหอยในรปอน เชน เสยง หรอความรอน เปนตน จนในทสดพลงงานของระบบหมดไป นอกเสยจากวามสงใดสงหนงมากระท า หรอกระตนใหการสนสะเทอนยงคงมอย
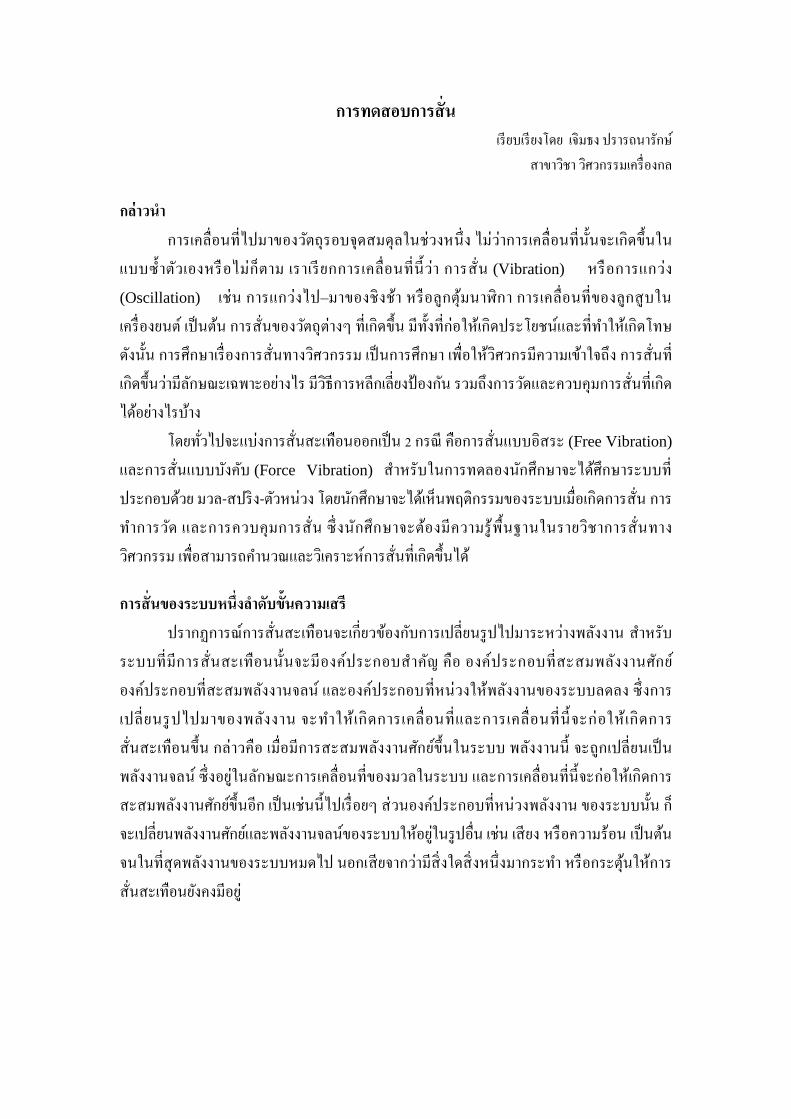
รปท 1 ก. แบบจ าลองของระบบเชงกลทมการสนสะเทอน ข. แผนภาพวตถอสระของมวล
แบบจ าลองของระบบดงรปท 1 สามารถเขยนเปนสมการเคลอนท (Equation of Motion) ได
0mx cx kx (1)
ความถธรรมชาต (Natural Frequency, n ) ของระบบทมการสนอสระ มคา
n
k
m (2)
และนยามให อตราสวนความหนวง (Damping Ratio, ) เปน
2 c
C C
Cmk (3)
สมการการเคลอนทจะมผลเฉลยของสมการในรป stx t Ce ดงนนสมการท (2.1) สามารถเขยนใหมได คอ
2 22 0st
n ns s Ce (4)
ดงนนผลเฉลยของสมการการเคลอนท จะอยในรป
2 2( 1) ( 1)
1 2( ) n nt tx t C e C e
(5)
ลกษณะการสนของระบบจะขนอยกบคาอตราสวนความหนวง
1. เมอ >1 2 2( 1) ( 1)
1 2( ) n nt tx t C e C e
(6)
2. เมอ = 1 1 2( ) ntx t C C t e
(7)
3. เมอ < 1 2 2( 1 ) ( 1 )
1 2( ) n ni t i tx t C e C e
(8)
ก ข

หรอจดใหอยในรป ( ) sin( )nt
dx t Xe t
(9)
รปท 2 ผลการเคลอนทของมวล
เมอระบบมการเคลอนทแบบมความหนวง โดยท 1 ความถของการสนจะเปนความถของการสนหนวง (Frequency of Damped Oscillation) หรอ
21d n (10)
จากรปท 2 ผลการตอบสนองจะเปนการลดลงอยางลอการทม (Logarithmic Decrement) เราสามารถหาคาอตราสวนความหนวงไดจากความสมพนธดงน
21
2ln
1
n
n
X
X
(11)
การสนสะเทอนแบบบงคบ
ระบบทมการสนสะเทอน โดยทวไปจะมแรงกระท า แรงเหลานมกจะเปนฟงกชนกบเวลา ซงอาจจะอยในระบบตางๆ เชน แรงกระแทก (Impact) แรงแบบสม (Random) หรอ แรงแบบฮารโมนกส เปนตน ส าหรบแรงแบบฮารโมนกสนถอวาเปนแรงพลวตทพบเหนไดมาก ซงมกจะพบแรงลกษณะนในเครองจกร หรอกลไกทมการหมน
โดยปกตแลว การตอบสนองของระบบ จะประกอบไปดวย สองสวน คอ การตอบสนองชวคร (Transient Response) และการตอบสนองในสภาวะคงตว (Steady-State Response) ซงจะคงอยตลอดเทาทมแรงกระท า เนองจากการตอบสนองชวครจะหายไปเมอเวลาผานไปพอสมควร การตอบสนองจะคงอยเพยงการตอบสนองในสภาวะคงตวของระบบ
( )mx cx kx f t (12)

การสนอนเนองมาจากการสนของฐาน
รปท 3 แบบจ าลองของระบบทมการสนสะเทอนอนเนองมาจากการสนของฐาน
เมอฐานเกดการสนดวยฟงกชน cosx X t (13)
ผลการตอบสนองของระบบทสภาวะคงตวคอ cos( )x X t (14)
ขนาดของการสน คอ
2 2
2 2 2 2
1 4
(1 ) 4
X r
X r r
(15)
โดยท / nr (16)
ผลการตอบสนองของระบบเนองจากการสนของฐาน แสดงดงรป 4
รปท 4 กราฟการตอบสนองของระบบเนองจากการสนของฐาน

การสนอนเนองมาจากการเสยดลในการหมน การหมนรอบแกนของวตถทมมวลหากขาดความสมดลในการหมนจะกอใหเกดการสนสะเทอนขน เชน การหมนของเพลาขอเหวยงในเครองยนต เปนตน ดงรปท 4 สมมตใหมวลดงกลาวแทนดวย m และให M แทนมวลรวมของระบบ r เปนระยะเยองศนย ของมวล m ทเคลอนทรอบแกนดวยความเรวเชงมม หากการเคลอนทของระบบมเฉพาะในแนวดง แรงทกระท ากบระบบและการตอบสนองในรปไรมตของระบบทสภาวะคงตว คอ
2 sinf t m r t (17)
และ
2
22 2
/
1 / 2 /
n
cn n
MX
m r
(18)
และความตางเฟส คอ
1
2
2 /tan
1 /
n
n
(19)
รปท 5 แบบจ าลองของระบบทมการสนสะเทอนอนเนองมาจากการเสยดลในการหมน
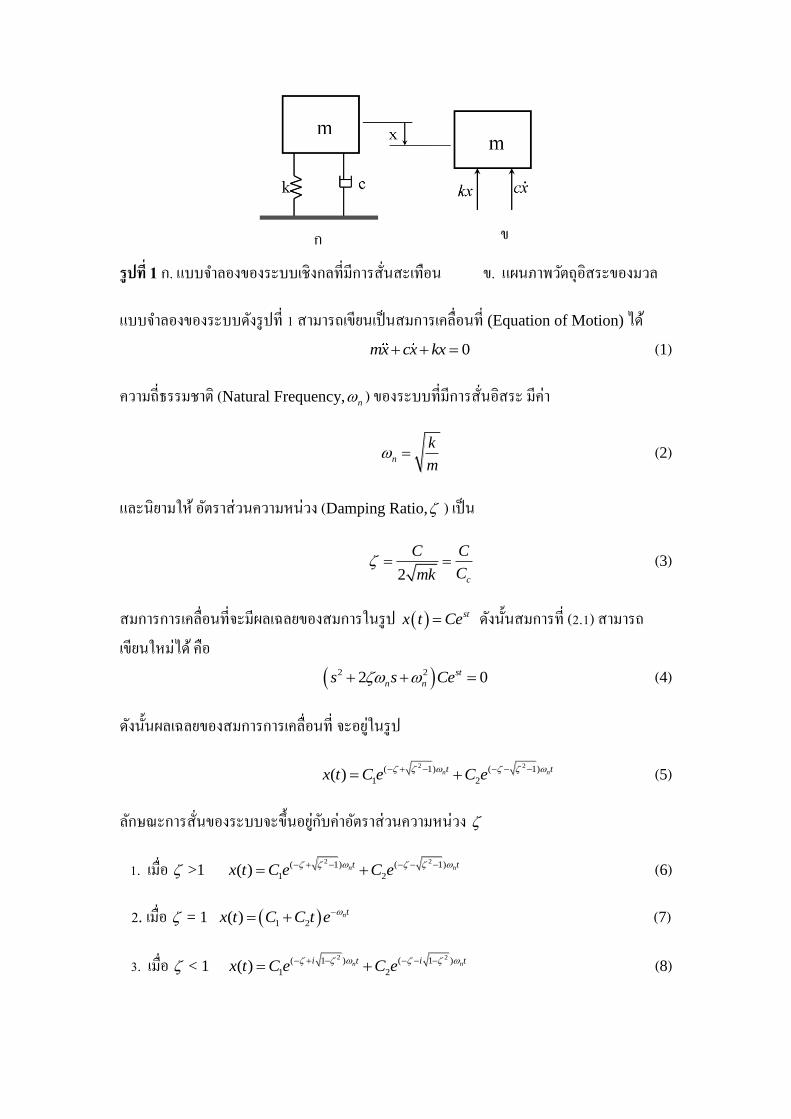
ผลการตอบสนองของระบบเนองจากการสนของฐานและการเสยดลในการหมน แสดงดงรป 6
รปท 6 กราฟการตอบสนองของระบบเนองจากการทหมนไมสมดล
อปกรณซบการสนสะเทอนแบบไมมความหนวง (Undamped Vibration Absorber) เมอระบบทางกลท างานดวยความถทใกลเคยงกบความถวกฤต ขนาดของการสนจะมากขนเรอยๆ และมากทสดทความถเดยวกบความถธรรมชาต ปรากฏการณเชนน เรยกวา ปรากฏการณการเกดเรโซแนนซ (Resonance) ซงการสนสะเทอนเหลานจะท าใหเกดความเสยหายตอระบบได ส าหรบระบบทมหนงล าดบขนความเสร (Degree of Freedom) จะมคาความถวกฤตอยคาหนง ซงคาความถวกฤตดงกลาวมกจะเปนความถเดยวกบความถธรรมชาตของระบบ ตามปกตเมอท าการตดตงอปกรณซบการสนสะเทอนทมความถธรรมชาตเทากบความถธรรมชาตของระบบ ณ. ต าแหนงความถวกฤต การสนของระบบจะมขนาดเทากบศนย และการตดตงอปกรณซบการสนจะท าใหระบบดงกลาว กลายเปนระบบสองล าดบขนความเสร ซงจะมความถวกฤตเกดขนใหมสองความถ โดยความถดงกลาวจะมคาหนงสงและอกคาหนงต ากวาคาความถวกฤตเดม

รปท 7 ก. แบบจ าลองของระบบทตดตงอปกรณซบการสนซงอยภายใตแรงกระท าแบบฮารโมนกส ข. แผนภาพวตถอสระของมวลหลก
ค. แผนภาพวตถอสระของมวลซบการสน
จากรปท 7 พจารณาแผนภาพวตถอสระของมวลทงสองในรปท 7 ข. และ ค. จะไดสมการการเคลอนทของมวลหลกและมวลซบการสน ดงสมการท 20 และ 21 ตามล าดบ
sina a fMx cx kx k x x F t (20) 0a a a am x k x x (21)
และสมการผลการตอบสนองของระบบทสภาวะคงตว ภายใตแรงกระท าแบบฮารโมนกส ของมวลหลก คอ
2
22 2 2
a
a a a a a a
k mx
F k M k m m k j c k m
(22)
รปท 8 กราฟแสดงความสมพนธของการสนของระบบทตดตงอปกรณซบการสนแบบไม มความหนวงกบอตราสวนความถ
ก ข
ค

เครองมอทดสอบ
1. เครองมอทใชในการทดสอบ แสดงในรปท 8 เปนภาพของ Cussons P5000 (ใชในการทดลองท 1-4) เปนอปกรณส าหรบทดสอบ Free and forced Vibration with Damping ของระบบ mass-spring-damper ทมหนงล าดบขนความเสร โดยมคณสมบตทวไปดงน
● ความถธรรมชาตโดยประมาณ 1 Hz
● แอมพลจดในการสนสงสด 25 mm
● อตราการสวนความหนวงสงสด 1.3
1. Vibration Mass 9. Paper Drive
2. Air-Bearing Guide 10. Bass Plate
3. Frame 11. Driving Motor
4. Spring 12. Gear Box
5. Copper Plate 13. Eccentric
6. Electromagnet 14. Air Pressure regulator and filter
7. Stylus 15. Rotating out-of-balance mass
8. Teledeltos Paper 16. Control Unit
รปท 9 Cussons P5000 Apparatus for Free and Force vibration with damping

2. ชดปฏบตการการสนสะเทอนของ TecQuipment ชด TM16 The Universal Vibration
Apparatus ซงจะใชในการทดลองท 5 และ 6 ซงเปนการศกษาเรองการสนของระบบทมความหนวง การสนพองและการใชอปกรณซบการสน โดยทวไปมคณสมบตดงน
● ความถธรรมชาตของคานเปลา ประมาณ 42 Hz
● ความถธรรมชาตของคานทตดตงตวก าเนดการสน ประมาณ 23 Hz
● อตราสวนความหนวง ประมาณ 0.0055
1. Trunnion Mounting 2. Precision Motor Speed Control
3. Rectangular Section Beam 4. Lateral Movement Mounting
5. Micrometer Support 6. Contactor
7. Dashpot
รปท 10 TecQuipment TM16Universal Vibration Apparatus

การทดลองท 1 Free Vibration without Damping
วตถประสงค - เพอหาคาความถธรรมชาต (Natural Frequency)
- เพอหาคาความแขงสปรง (Spring Stiffness)
ขนตอนการทดลอง 1. ปรบต าแหนงเยองศนยท Frame ให Amplitude เปนศนย ปดสวตซท Control Unit
2. เปดวาลวปมลม ปรบแรงดนลมท Pressure Regulator ประมาณ 1 bar
3. ดน Vibrating Mass ใหชดดานใดดานหนง จากนนปลอยมวลพรอมจบเวลา 4. นบจ านวนรอบการเคลอนทของมวล จนกวาไมสามารถสงเกตได หรอเวลาผานไป 45
วนาท จงหยด
5. บนทกผลของมวล เวลา และจ านวนรอบ
6. ใสมวล Out of Balance Mass และท าการทดลองซ าตามขอ 3-5
7. เพมมวลขนาด 0.5, 1.0, 1.5, 2.0, 2.5 kg และท าการทดลองซ าตามขอ 3-5
การวเคราะหผล จงวเคราะหกราฟความสมพนธระหวาง 2
n กบ 1/m พรอมทงอภปราย
หมายเหต
ทกครงทมการเพมมวลจะตองปรบแรงดนลมใหไดประมาณ 1 bar
การทดลองท 2 Free Vibration with damping
วตถประสงค เพอหาคา Damping Ratio ของระบบ
ขนตอนการทดลอง 1. ปรบตงเยองศนยให Amplitude เทากบ 0
2. เลอกมวลทจะทดลองใสลงใน Vibrating Mass ปรบความดนลมประมาณ 1 bar
3. ตดตง Stylus ทสวนปลายของ Vibrating Mass
4. ใสกระดาษบนทกทลกกลง หมนกระดาษวาง Stylus ลงบนกระดาษบนทก
5. ท าสญลกษณทปลาย Stylus แตะกระดาษเมอมวลอยทจดสมดล
6. ดน Vibrating mass ใหชดดานใดดานหนง ท าสญลกษณทปลาย Stylus ซงทจดนเปนต าแหนงท Amplitude มคาสงสด
7. เปดสวตซ Control Unit ปรบคา Damping Current

8. ปลอยมวลใหเคลอนท พรอมกบเปดมอเตอรหมนกระดาษและกดปม Write บนControl
Unit คางไวทนท ใหไดจ านวนการเคลอนท 1.5-2 รอบ ปดสวตชและปลอยปม Write
ทนท
9. ท าสญลกษณทจดสมดลอกครงเมอมวลหยดนงแลว 10. เปลยนคา Damping Current และท าการทดลองซ าตามขอ 5-9
การวเคราะหผล
น าบนทกการขจดของการเคลอนทมาหาคา Damping Ratio
ขอควรระวง การตงคา Damping Current ท 3 amp หรอมากกวา ในขณะท าการทดลองไมควรทง ไวนานเกน 5 นาท เนองจากจะท าให Electromagnetic Coil รอนจนเกนไป
การทดลองท 3 Forced Vibration excited by Oscillating the Support
วตถประสงค เพอใหเขาใจถงพฤตกรรมของระบบทเกดการสนเนองจากฐานเปน
ตวกระตนและวเคราะหผลได
ขนตอนการทดลอง 1. ปรบต าแหนงเยองศนย ให Amplitude มคาตามทก าหนด
2. เลอกมวลท าการทดลอง ใสลงใน Vibrating mass ปรบแรงดนลมใหเทากบ 1 bar
3. ตดตง Stylus ทสวนปลายของ Vibrating mass
4. ใสกระดาษบนทกขอมลทลกกลงหมนกระดาษวาง Stylus ลงบนกระดาษ
5. เปดสวตชท Control Unit ปรบคา Damping Current ตามตองการ
6. สบสวตช “Drive” ไปท Frame ปรบความเรวมอเตอรตามทก าหนด
7. ปลอยมวลใหเคลอนทไปเรอย ๆ จนกระทงคงท เปดสวตช หมนกระดาษ พรอมกบกดปม write ใหไดการเคลอนท ประมาณ 1 รอบคลน แลวจงหยดการบนทก
8. วดความเรวมอเตอรโดยใช Tachometer
9. เปลยนความเรวของมอเตอร แลวท าการทดลองซ าตามขอ 7-8 และบนทกผลลงในตาราง
การวเคราะหผล
บนทกการเคลอนทมา plot กราฟ ระหวาง X
X และ
n

การทดลองท 4 Forced Vibration excited by rotating out-of-balance force
วตถประสงค เพอใหเขาใจถงพฤตกรรมของระบบทเกดการสนเนองจาก out-of-balance
force และวเคราะหผลได
ขนตอนการทดลอง 1. ปรบต าแหนงเยองศนย ให Amplitude มคาเทากบ 0
2. ใสชด Out of Balance Mass ลงใน Vibrating Mass ปรบความดนลมใหเทากบ 1 bar
3. ตดตง stylus และใสกระดาษบนทกขอมลทลกกลงหมนกระดาษ
4. เปดสวตช Control Unit ปรบคา Damping Current ทตองการ
5. สบสวตช “Drive” ไปท Out-of-balance แลวจงท าการปรบความถของมอเตอร
6. ปลอยมวลใหเคลอนทไปเรอย ๆ จนกระทงคงท เปดสวตช หมนกระดาษ พรอมกบกดปม write ใหไดการเคลอนท ประมาณ 1 รอบคลน แลวจงหยดการบนทก
7. วดความเรวมอเตอรโดยใช Tachometer
8. เปลยนความเรวของมอเตอร แลวท าการทดลองซ าตามขอ 6-7 และบนทกผลลงในตาราง
การวเคราะหผล
น าบนทกการเคลอนท มาท าการ plot กราฟความสมพนธ c
XM
m r กบ
n
หมายเหต
ส าหรบการทดลองท 3 และ 4 ในการเลอกความถของ force ใหใชความถในชวง 0.5n – 2.5n โดยท n เปนความถธรรมชาตของมวลทน ามาทดลอง
การทดลองท 5 Damped Transverse Vibration of Beam
วตถประสงค เพอศกษาการสนของระบบทมความหนวง เมอความถของแรงกระตนมการ
เปลยนแปลง
ขนตอนการทดลอง 1. ปรบ Micrometer ใหแตะกบหนาสมผสทต าแหนงสมดล และบนทกคาท Micrometer
เปนคาอางอง
2. ลดระดบสวนปลายของ Micrometer ลงประมาณ 15 มลลเมตร
3. เปดสวตซท Control Unit เพอเปดเครอง

4. ปรบความเรวมอเตอรตามทก าหนด และคอยๆ ปรบระดบสวนปลายของ Micrometer ขน
อกครง จนสวนปลายของ Micrometer สมผสกบหนาสมผส Stroboscope จะเรม
กระพรบ จนกระทง การกระพรบของ Stroboscope คงท อานคาจาก Micrometer และ
บนทกผล
การวเคราะหผล
น าผลการทดลอง มา Plot กราฟความสมพนธระหวางn
กบ X พรอมทงอภปราย
การทดลองท 6 Undamped Vibration Absorber
วตถประสงค เพอใหเขาใจถงการลดการสนของระบบโดยใช อปกรณดดซบการ สนสะเทอน และสามารถค านวณต าแหนงของมวลได
ขนตอนการทดลอง ตอนท 1 1. ตดตงมวลทก าหนด กบคานจากนน ปรบความเรวมอเตอร จน amplitude การสนของ คานมคามากทสด บนทกคาความเรวรอบ
2. ตดตงมวลซบการสน และปรบระยะหางของมวลดดซบการสน จน Amplitude การ สนของคานมคานอยทสด วดระยะหางของมวลดดซบการสน แลวบนทกผล
3. เปลยนน าหนกของมวลทก าหนด แลวท าซ าขนตอนท 1-2
การวเคราะหผล
น าคา ทไดจากการทดลอง plot กราฟความสมพนธ ระหวางความถ f กบระยะ l
เปรยบเทยบกบคาทางทฤษฎทไดจาก สมการความสมพนธ 3
1 3
2
EIf
ml
ขนตอนการทดลอง ตอนท 2
1. เลอกน าหนกมวลทตองการตดตงกบคาน
2. ปรบความเรวของมอเตอร ไปท 5,6,7,...,45 Hz พรอมทง อานคา Amplitude การสน จาก Micrometer และบนทกผล ตามล าดบ
3. ตดตงอปกรณซบการสน ตดตงมวลซบการสน และปรบระยะหางของมวลดดซบการ
สน จน Amplitude การสนของคานมคานอยทสด วดระยะหางของมวลดดซบการสน แลวบนทกผล
4. ท าการทดลองตาม ขอท 2 ซ า

การวเคราะหผล
น าคาผลการทดลองจากขอ 2 และ 4 มา plot กราฟความสมพนธของความถ และ Amplitude การสน
เอกสารอางอง
1. กนตธร ช านประศาสน., “พนฐานการสนทางวศวกรรม”,2545
2. Cussons Technology, Instruction Manual:P5000 Apparatus for Free and Forced
Vibration with Damping
3. Rao,S.S.,”Mechanical Vibration,”3nd
ed., Addison-Wesley, 1995
4. TechQuipment, Instruction Manual:TM16 Universal Vibration Apparatus

ตารางบนทกผลการทดลอง การทดลองท 1 Free vibration without damping ตารางท 1 แสดงผลการทดลอง Free vibration without damping
มวล จ านวนรอบ เวลา Fn n 2
n มวล 1
m
(กโลกรม) (รอบ) (วนาท) (Hz) (rad/s) (กโลกรม) mb 15
mb+0.5 15 mb+1.0 15 mb+1.5 15 mb+2.0 15 mb+2.5 15 mb+ mc 15
จาก n k m ----> 2
n k m ----> 2
nk m ……………….. (*) ส าหรบแสดงการค านวณหาคา mb และ mc

การทดลองท 2 Free vibration with damping มวล ( m ) kg คา stiffness ของ spring , k = _____________ (จากการทดลองท 1) 1. Damping current 0.1 Amp (แทรกรปการเคลอนท) 2. Damping current 0.2 Amp (แทรกรปการเคลอนท) 3. Damping current 0.4 Amp (แทรกรปการเคลอนท) 4. Damping current 0.6 Amp (แทรกรปการเคลอนท)
เมอ 1
22
2ln
1
X
X
และ
2
C
m k
ตารางท 2 แสดงผลการทดลอง Free vibration with damping
Current 1X 2X
1
2
lnX
X
C
(Amp) (mm) (mm) (kg/s) 0.1 0.2
0.4
0.6
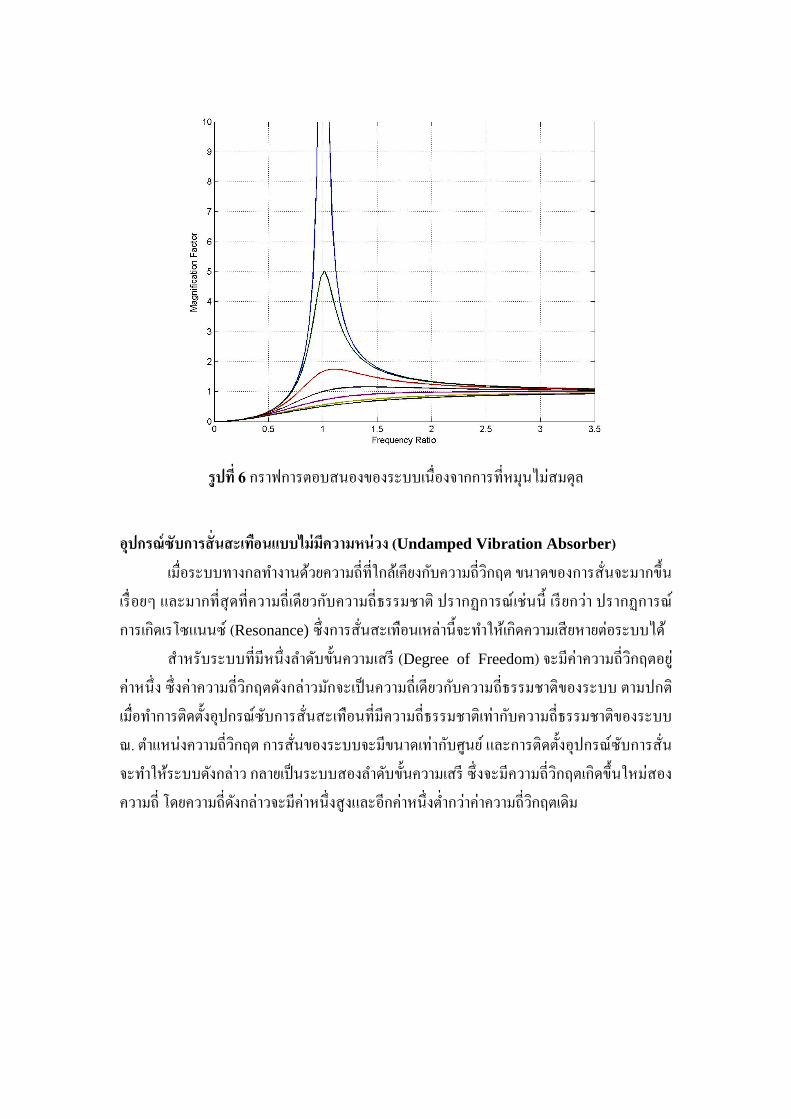
การทดลองท 3 Forced vibration excited by oscillating the support มวล kg ( n =………………. rad/s : จากการทดลองท 1)
Damping current 0.4 Amp ( =…………..…: จากการค านวณการทดลองท 2) Flame Amplitude (X') mm.
X คอ ระยะการเคลอนท , r คอ frequency ratio 1. ความเรวรอบมอเตอร rpm (แทรกรปการเคลอนท) 2. ความเรวรอบมอเตอร rpm (แทรกรปการเคลอนท) 3. ความเรวรอบมอเตอร rpm (แทรกรปการเคลอนท) 4. ความเรวรอบมอเตอร rpm (แทรกรปการเคลอนท) ตารางท 3 แสดงผลการทดลอง Forced vibration excited by oscillating the support
(ก าหนด) Speed Motor Speed/20 Freq.
n
r
X X/X'
(rpm) (rpm) (Hz) (rad/s) (mm) 400 500 600 700 1300 1400 1500

การทดลองท 4 Forced vibration excited by rotating out–of balance force มวล ( M ) = kg ( n =………………. rad/s : จากการทดลองท 1)
Damping current Amp ( =………………: จากการค านวณการทดลองท 2) Constant of Apparatus
- Rotating out-of-balance mass um = 0.305 kg - Radius of rotation of center of mass of out-of-balance mass ur = 35 mm. - X คอ ระยะการเคลอนท 1. Frequency _____________ Hz (แทรกรปการเคลอนท) 2. Frequency _____________ Hz (แทรกรปการเคลอนท) 3. Frequency _____________ Hz (แทรกรปการเคลอนท) 4. Frequency _____________ Hz (แทรกรปการเคลอนท) 5. Frequency _____________ Hz (แทรกรปการเคลอนท) 6. Frequency _____________ Hz (แทรกรปการเคลอนท) 7. Frequency _____________ Hz (แทรกรปการเคลอนท)
จ านวนรอบการหมน เวลา Freq.
n
r
X u u
MX
m r
(รอบ) (วนาท) (Hz) (rad/s) (mm) 15 15 15 15 15 15 15

การทดลองท 5 Transverse Vibration of Beam and Adding Mass ตอนท 1 nF = ______________ Hz ตารางบนทกผลการทดลอง
Motor speed (rev/min)
Frequency (Hz)
Freq. ratio
(n
)
Amplitude (mm)
(LabVIEW)
500 600 700 800 900
1000 1100 1200 1300
1500 1600 1800 2000 2200 2400

ตอนท 2 nF = ______________ Hz ตารางบนทกผลการตอบสนองของระบบทมการตดตงมวลเพม ____________ kg
Motor speed (rev/min)
Frequency (Hz)
Freq. ratio
(n
)
Amplitude (mm)
(LabVIEW)
500 600 700 800 900
1000 1200
1400 1500 1600 1800 2000 2200 2400

การทดลองท 6 Undamped Vibration Absorber ตารางบนทกผลการตอบสนองของระบบทตดตง Absorber
ความเรวรอบทออกแบบ rpm nF (1) = ______________Hz nF (2) = ______________Hz
Motor speed (rev/min)
Frequency (Hz)
Amplitude (mm)
micrometer
Amplitude (mm)
(LabVIEW)
500 600 700 800 900 950
1000
ความเรวรอบทออกแบบ
1500 1600 1800 2000 2200 2400



![บทที่ี3 - eng.sut.ac.theng.sut.ac.th/me/meold/2_2552/425307/Chapter_3[1].pdf · ส วน ประกอบของอากาศและเชื้ือเพลิงิ((ต](https://img.dokumen.tips/doc/110x75/5e79325bf0033d535b7284d5/aaaaaa3-engsutacthengsutacthmemeold22552425307chapter31pdf.jpg)

























