Embed Size (px)
Citation preview

© Andy Wellings, 2004
Concurrent and Real-Time Programming in
Java
Electronic copies of course foils available via http://www-course.cs.york.ac.uk/crt
Course book: “Concurrent and Real-Time Programming in Java” Andy Wellings, Wiley, 2004 (£20.99 from Amazon)
Real-Time Specification for Java (RTSJ) Versions 1.0.1 is available from http://www.rtj.org
© Andy Wellings, 2004
Books
RTSJ Version 0.9 RTSJ Version 1.0.1

© Andy Wellings, 2004
Other books
RTSJ Version 0.9RTSJ Version 1.0

© Andy Wellings, 2004
Practicals
Start week 3 Demonstrators:

© Andy Wellings, 2004
Thursday 14.15

© Andy Wellings, 2004
Thursday 15.15

© Andy Wellings, 2004
Prerequisites
You should already:
be a competent programmer in an imperative programming language like C, Pascal, Ada, C++, C# etc
be able to program in sequential Java
have a good understanding of Operating System Principles, in particular the mechanisms needed to support concurrency, e.g. processes, semaphores, etc

© Andy Wellings, 2004
Overall Technical Aims of the Course
To understand the basic requirements of concurrent and real-time systems
To understand how these requirements have influenced the design of Java and the Real-Time Specification for Java
To be able to program advanced concurrent real-time Java systems

© Andy Wellings, 2004
Course Contents I
Introduction to Course, Concurrent and Real-Time
Programming
Concurrent Programming in Java
Communication and Synchronization
Motivation for, and an overview of, the RTSJ
Memory Management
Clocks and Time
Scheduling and Schedulable Objects
Asynchronous Events and Handlers

© Andy Wellings, 2004
Course Contents II
Real-Time Threads
Asynchronous Transfer of Control
Resource Control
Schedulability Analysis
Conclusions
© Andy Wellings, 2004
Concurrent Programming
The name given to programming notation and techniques for expressing potential parallelism and solving the resulting synchronization and communication problems
Implementation of parallelism is a topic in computer systems (hardware and software) that is essentially independent of concurrent programming
Concurrent programming is important because it provides an abstract setting in which to study parallelism without getting bogged down in the implementation details

© Andy Wellings, 2004
Why we need it
To fully utilise the processor
10-7
10-6
10-5
10-4
10-3
10-2
10-1
102
101
10-8
10-9
Res
pons
e ti
me
in s
econ
ds
100 human tape
floppy
CD
memory
processor

© Andy Wellings, 2004
Parallelism Between CPU and I/O Devices
CPU I/O Device
Initiate I/OOperation Process I/O
Request
Signal Completion
Interrupt I/ORoutine I/O Finished
Continue withOutstanding Requests

© Andy Wellings, 2004
Why we need it
To allow the expression of potential parallelism so that more than one computer can be used to solve the problem
Consider trying to find the way through a maze

Sequential Maze Search

Concurrent Maze Search

© Andy Wellings, 2004
Why we need it
To model the parallelism in the real world
Virtually all real-time systems are inherently concurrent — devices operate in parallel in the real world
This is, perhaps, the main reason to use concurrency

Air Traffic Control

© Andy Wellings, 2004
Why we need it Alternative: use sequential programming techniques The programmer must construct the system as the
cyclic execution of a program sequence to handle the various concurrent activities
This complicates the programmer's task and involves considerations of structures which are irrelevant to the control of the activities in hand
The resulting programs will be more obscure and inelegant
Decomposition of the problem is more complex Parallel execution of the program on more than one
processor is more difficult to achieve The placement of code to deal with faults is more
problematic

© Andy Wellings, 2004
Terminology
A concurrent program is a collection of autonomous sequential processes, executing (logically) in parallel
Each process has a single thread of control The actual implementation (i.e. execution) of a
collection of processes usually takes one of three forms.
Multiprogramming processes multiplex their executions on a single processor
Multiprocessing processes multiplex their executions on a multiprocessor
system where there is access to shared memory
Distributed Processing processes multiplex their executions on several processors
which do not share memory

© Andy Wellings, 2004
What is a real-time system?
A real-time system is any information processing system which has to respond to externally generated input stimuli within a finite and specified period
the correctness depends not only on the logical result but also the time it was delivered
failure to respond is as bad as the wrong response!
The computer is a component in a larger engineering system => EMBEDDED COMPUTER SYSTEM
99% of all processors are for the embedded systems market

© Andy Wellings, 2004
Terminology Hard real-time — systems where it is absolutely imperative
that responses occur within the required deadline. E.g. Flight control systems.
Soft real-time — systems where deadlines are important but which will still function correctly if deadlines are occasionally missed. E.g. Data acquisition system.
Firm real-time — systems which are soft real-time but in which there is no benefit from late delivery of service.
A system may have all hard, soft and real real-time subsystemsMany systems may have a cost function associated with missing each deadline

© Andy Wellings, 2004
A simple fluid control system
Pipe
Flow meter
Valve
Interface
ComputerTime
Input flowreading
Processing
Output valveangle

© Andy Wellings, 2004
A Grain-Roasting Plant
Fuel Tank
Furnace
Bin
Pipe
fuel
grain

© Andy Wellings, 2004
A Process Control System
ProcessControl
Computer
ChemicalsandMaterials
ValveTemperatureTransducer
StirrerFinishedProducts
PLANT

© Andy Wellings, 2004
A Production Control System
ProductionControlSystem
Parts
Machine Tools Manipulators Conveyor Belt
FinishedProducts
© Andy Wellings, 2004
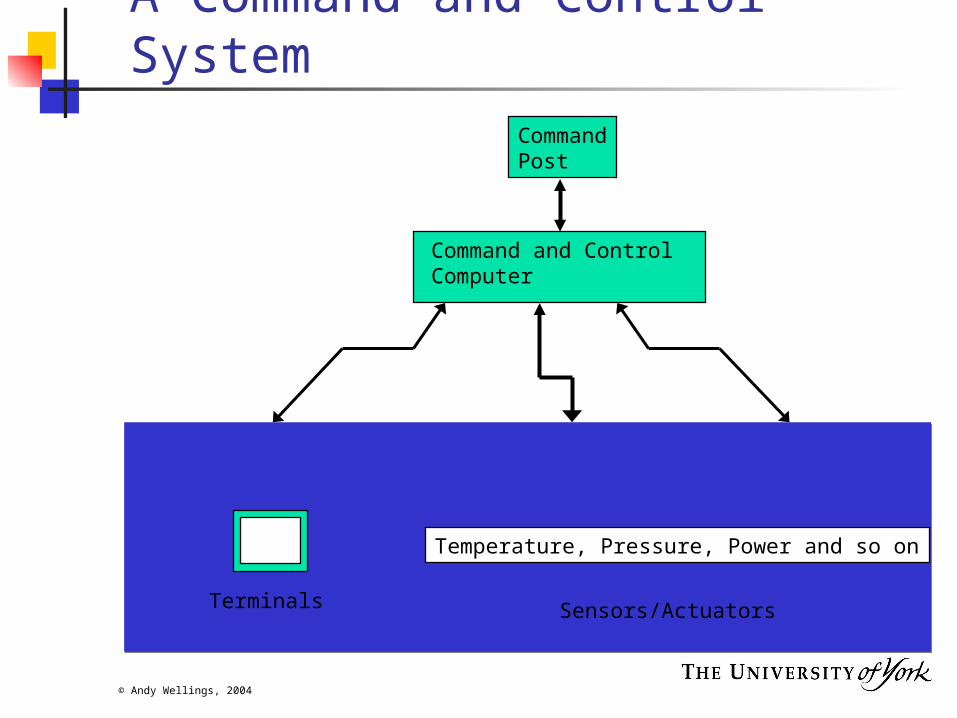
A Command and Control System
Temperature, Pressure, Power and so on
Terminals
Command and ControlComputer
CommandPost
Sensors/Actuators

© Andy Wellings, 2004
A Typical Embedded System
Algorithms forDigital Control
Data Logging
Data Retrievaland Display
OperatorInterface
InterfaceEngineeringSystem
RemoteMonitoring System
Real-TimeClock
Database
Operator’sConsole
Display Devices
Real-Time Computer

© Andy Wellings, 2004
Characteristics of a RTS
Large and complex — vary from a few hundred lines of assembler or C to 20 million lines of Ada estimated for the Space Station Freedom
Concurrent control of separate system components — devices operate in parallel in the real-world; better to model this parallelism by concurrent entities in the program
Facilities to interact with special purpose hardware — need to be able to program devices in a reliable and abstract way
© Andy Wellings, 2004
Characteristics of a RTS
Extreme reliability and safe — embedded systems typically control the environment in which they operate; failure to control can result in loss of life, damage to environment or economic loss
Guaranteed response times — we need to be able to predict with confidence the worst case response times for systems; efficiency is important but predictability is essential

© Andy Wellings, 2004
Real-time Programming Languages
Assembly languages Sequential systems implementation languages —
e.g. RTL/2, Coral 66, Jovial, C. Both normally require operating system support. High-level concurrent languages. Impetus from the
software crisis. e.g. Ada, Chill, Modula-2, Mesa, Java. No operating system support! We will focus on Java and the Real-Time
Specification for Java See Burns, Wellings, Real-Time Systems and
Programming Languages, 3rd Edition, 2001, Addison Wesley for a general discussion on other languages and operating systems

© Andy Wellings, 2004
Java Architecture
Real-time Operating System
JVM
JBC
Standalone
JVM
JBC
Hardware JVM
JBC
© Andy Wellings, 2004
Summary I
The motivations for concurrent programming have been presented: fully utilize the processor allow parallel execution model real world parallelism
Two main classes of real-time systems have been identified: hard real-time systems soft real-time systems
© Andy Wellings, 2004
Summary II
The basic characteristics of a real-time or embedded computer system are: largeness and complexity, manipulation of real numbers, extreme reliability and safety, concurrent control of separate system components, real-time control, interaction with hardware interfaces, efficient implementation.

© Andy Wellings, 2004
Further Reading
Chapter 1 of Burns and Wellings, “Real-Time Systems and Programming Languages”, 3rd Edition, 2001 (in library)