Embed Size (px)
Citation preview
ce Science 138 (2008) 84–100www.elsevier.com/locate/cis
Advances in Colloid and Interfa
Wetting on axially-patterned heterogeneous surfaces
M.A. Rodríguez-Valverde ⁎, F.J. Montes Ruiz-Cabello, M.A. Cabrerizo-Vilchez
Biocolloid and Fluid Physics Group, Department of Applied Physics, University of Granada, Campus of Fuentenueva; E-18071 Granada, Spain
Available online 27 December 2007
Abstract
Contact angle variability, leading to errors in interpretation, arises from various sources. Contact angle hysteresis (history-dependent wetting)and contact angle multiplicity (corrugation of three-phase contact line) are irrespectively the most frequent causes of this uncertainty. Secondaryeffects also derived from the distribution of chemical defects on solid surfaces, and so due to the existence of boundaries, are the known “stick/jump-slip” phenomena. Currently, the underlying mechanisms in contact angle hysteresis and their connection to “stick/jump-slip” effects and theprediction of thermodynamic contact angle are not fully understood. In this study, axial models of smooth heterogeneous surface were chosen inorder to mitigate contact angle multiplicity. For each axial pattern, advancing, receding and equilibrium contact angles were predicted from thelocal minima location of the system free energy. A heuristic model, based on the local Young equation for spherical drops on patch-wise axialpatterns, was fruitfully tested from the results of free-energy minimization. Despite the very simplistic surface model chosen in this study, itallowed clarifying concepts usually misleading in wetting phenomena.© 2007 Elsevier B.V. All rights reserved.
Keywords: Contact angle; Hysteresis; Stick-jump-slip; Heterogeneity; Axial pattern
Contents
1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 852. Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
2.1. Spherical sessile drop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 862.2. Axially-patterned heterogeneity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 862.3. “Stick/jump-slip” phenomena. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 882.4. The local Young equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 892.5. Equilibrium contact angle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
3. Methods . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 903.1. Free-energy minimization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 903.2. Heuristic model for patch-wise patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
3.2.1. Advancing mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 913.2.2. Receding mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4. Results. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 924.1. Step pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 924.2. Square pattern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 934.3. Periodic patch-wise pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 934.4. Periodic continuous pattern. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5. Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 956. Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
⁎ Corresponding author. Tel.: +34 958 24 00 25; fax: +34 958 24 32 14.E-mail address: [email protected] (M.A. Rodríguez-Valverde).
0001-8686/$ - see front matter © 2007 Elsevier B.V. All rights reserved.doi:10.1016/j.cis.2007.12.002
85M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
Notation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98Acknowledgements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
1. Introduction
There are many applications where wetting plays an importantrole, such as coatings (paints, inks…), waterproofing, detergencyand adhesive industries [1]. Contact angle is used as measure ofthe wettability of a solid surface by a liquid [2] and to obtaininformation about the surface energy of materials [3]. However,there are still many open questions about themeasurement and theinterpretation of contact angle [4,5] due to phenomena such asContact Angle Multiplicity (CAM) [6–8] and Contact AngleHysteresis (CAH) [9–11].
Variability in contact angle is mainly caused by CAM andCAH, regardless. Experimentally, for a solid–liquid–vapor (SLV)system, a limited range of contact angles can be observed either asalong the three-phase contact line (CAM) or according to how thesystem reached the “equilibrium” state (CAH). The main dif-ference between both phenomena is that the first one appears in aparticular configuration of the system whereas the second one, indifferent configurations of the same thermodynamic state (e.g.temperature, volume and chemical potential), i.e. wetting is ahistory-dependent phenomenon. In addition, CAM provides abounded, uncountable set of contact angles due to the continuityof distorted contact lines and CAH involves a finite countable set,instead. Owing to these ever-present phenomena, the contactangle values frequently become meaningless concerning surfaceenergetics [4,5].
The identification of the thermodynamic contact angle (anglecorresponding to the global energy minimum of the SLV system)within the range of observable contact angles, is the main chal-lenge for Surface Thermodynamics [12–14]. Thereby, experi-mentally accessible contact angles are also referred to as apparentcontact angles (θapp). The existence of more than one apparentcontact angle can be caused either as by the corrugation of three-phase contact lines (CAM) or by their irreversible movementduring liquid spreading (CAH) [12]. Both phenomena becomeobservable at different scales. Frequently, CAH and CAM areobserved at once (e.g. drop on a tilted plate [15]) and consequentlythey are not clearly distinguished in literature, so that many morestudies have been mainly addressed to understand CAH [16–18].
The presence of topographic and/or chemical defects onsolid surfaces is assumed to be the origin of CAH [19–21].Hence, CAH is an indicator of the imperfection degree of thesubstrates and it is a characteristic of all real materials. Attemptsto understand CAH began many years ago [22–25], although itis not fully understood as yet.
Some authors reported that CAH actually depends on thespecific distribution of surface defects as regards to wetting lines[26]. Furthermore, boundaries between surface domains ofdifferent chemistry or elevation can cause several observableeffects on the three-phase contact line such as corrugation (CAM)[6,7,20] and “pinning” [27,28]. Consequently, the orientation ofthe three-phase contact line regarding the heterogeneity bound-
aries is critical for the reinforcement or the mitigation of CAH,CAM and pinning as well [26,29], according to the measuringscale used. Indeed, analysis of CAH should take into account thedetails of heterogeneity pattern and the shape of liquid–vaporinterface. Generally, CAH is examined from the minimization ofsystem free energy in order to determine the different (meso)-equilibrium states [14]. However, global-system free energyminimizations are mathematically difficult because of theproblem of analytical representation of the liquid–vapor interfaceof deformed menisci or non-axisymmetric drops [30–32].
The main motivation of this theoretical study is to examineexclusively CAH and pinning effects on particular heteroge-neous pattern and liquid–vapor interface shape, which jointlymagnify CAH and eliminate CAM. The chosen pattern consistsin an axial distribution (alternating concentric circular bands) ofsurface energy and as a result, the “natural” model of liquid–vapor interface in absence of gravity is the spherical cap [24,33].This free surface model is more realistic and experimentallyaccomplishable than those ones used by other authors [34–37].Quantitative measures of CAH and pinning/depinning featurescan be extracted from a suitable minimization of system freeenergy, known the surface defect pattern and drop volume [10].
2. Theory
From an energy description, CAH requires two conditions: theexistence of multiple local minima in the system free energy,referred to as metastable equilibrium states ormetastates [23,38];and the dependence of the location and the number of thesemetastates on liquid volume [36]. In absence of CAM, a liquidmeniscus in contact with a heterogeneous substrate will reach avalue of contact angle within of a finite discrete range. Hence, asan example, values of apparent contact angle measured duringspreading or condensation of drops differ from those of eva-porating drops, even for identical liquid volumes [39]. Further-more, in the case of finite-size menisci (drops), the amplitude anddensity of the mentioned spectrum of contact angles will changeas the liquid volume. Therefore, fluctuations in the experimentallyaccessible metastates, as the liquid volume varies, will illustratethe existence of CAH.
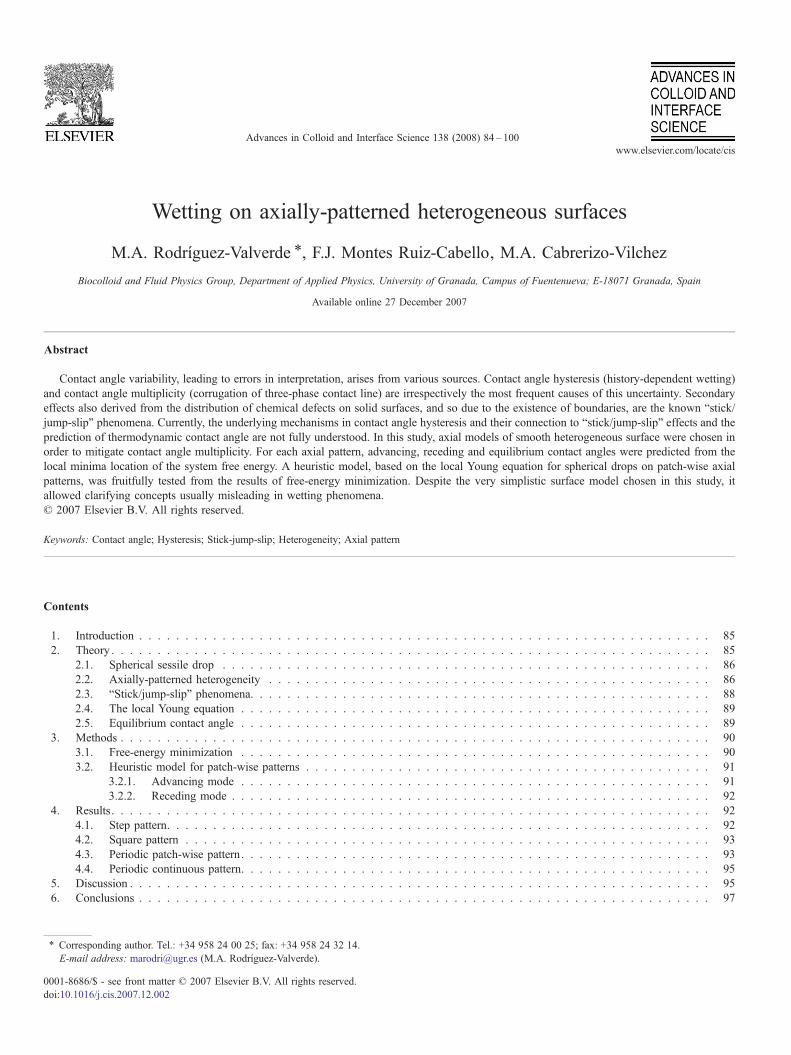
For a given SLV system and a fixed volume, three distinctivemetastates can be identified in the free energy curve (Fig. 1). Thesemetastates correspond to the maximum contact angle θadv(advancing contact angle, ACA), the minimum contact angle θrec(receding contact angle, RCA) and the contact angle of globalminimum energy θeq (equilibrium contact angle, ECA). Measure-ments of ACA and RCA are accomplished from the incipientrelative movement of advancing and receding contact lines,respectively [40–42]. Otherwise, ECA or thermodynamic contactangle, is hardly observable in controlled experiments. Theoretically,the apparent contact angles associated to each mentioned metastatecan be accordingly estimated from the free-energy minimization.
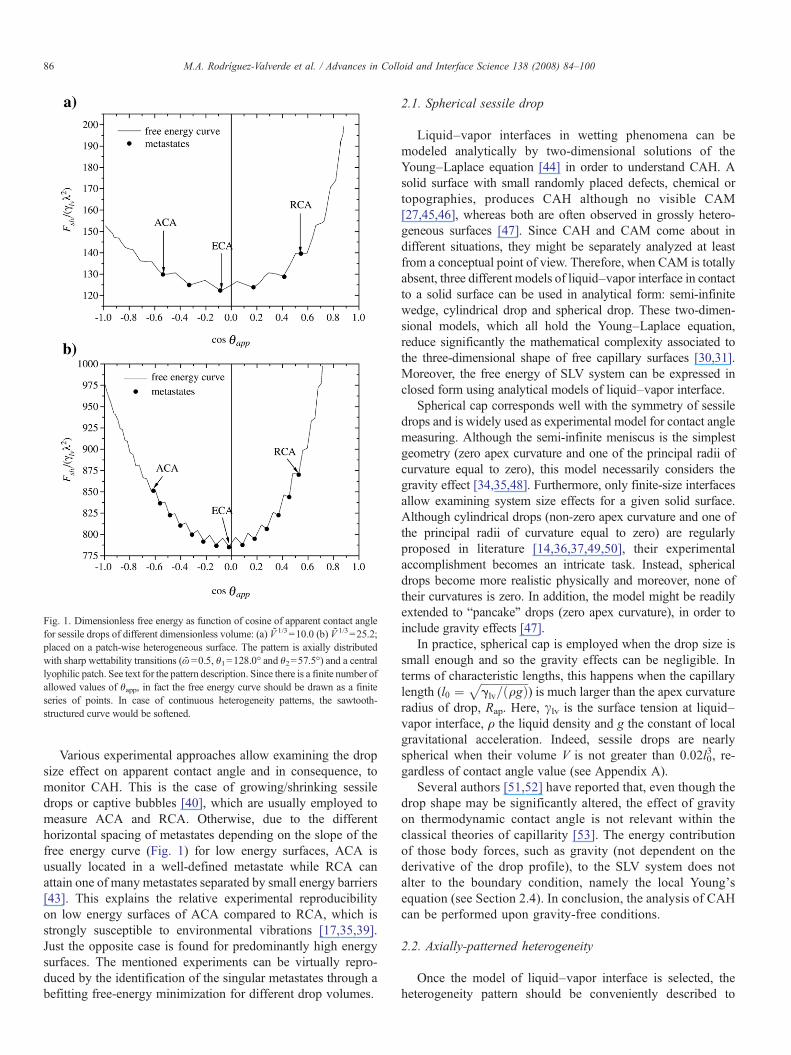
Fig. 1. Dimensionless free energy as function of cosine of apparent contact anglefor sessile drops of different dimensionless volume: (a) V 1/3=10.0 (b) V 1/3=25.2;placed on a patch-wise heterogeneous surface. The pattern is axially distributedwith sharp wettability transitions (ω=0.5, θ1=128.0° and θ2=57.5°) and a centrallyophilic patch. See text for the pattern description. Since there is a finite number ofallowed values of θapp, in fact the free energy curve should be drawn as a finiteseries of points. In case of continuous heterogeneity patterns, the sawtooth-structured curve would be softened.
86 M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
Various experimental approaches allow examining the dropsize effect on apparent contact angle and in consequence, tomonitor CAH. This is the case of growing/shrinking sessiledrops or captive bubbles [40], which are usually employed tomeasure ACA and RCA. Otherwise, due to the differenthorizontal spacing of metastates depending on the slope of thefree energy curve (Fig. 1) for low energy surfaces, ACA isusually located in a well-defined metastate while RCA canattain one of many metastates separated by small energy barriers[43]. This explains the relative experimental reproducibilityon low energy surfaces of ACA compared to RCA, which isstrongly susceptible to environmental vibrations [17,35,39].Just the opposite case is found for predominantly high energysurfaces. The mentioned experiments can be virtually repro-duced by the identification of the singular metastates through abefitting free-energy minimization for different drop volumes.
2.1. Spherical sessile drop
Liquid–vapor interfaces in wetting phenomena can bemodeled analytically by two-dimensional solutions of theYoung–Laplace equation [44] in order to understand CAH. Asolid surface with small randomly placed defects, chemical ortopographies, produces CAH although no visible CAM[27,45,46], whereas both are often observed in grossly hetero-geneous surfaces [47]. Since CAH and CAM come about indifferent situations, they might be separately analyzed at leastfrom a conceptual point of view. Therefore, when CAM is totallyabsent, three different models of liquid–vapor interface in contactto a solid surface can be used in analytical form: semi-infinitewedge, cylindrical drop and spherical drop. These two-dimen-sional models, which all hold the Young–Laplace equation,reduce significantly the mathematical complexity associated tothe three-dimensional shape of free capillary surfaces [30,31].Moreover, the free energy of SLV system can be expressed inclosed form using analytical models of liquid–vapor interface.
Spherical cap corresponds well with the symmetry of sessiledrops and is widely used as experimental model for contact anglemeasuring. Although the semi-infinite meniscus is the simplestgeometry (zero apex curvature and one of the principal radii ofcurvature equal to zero), this model necessarily considers thegravity effect [34,35,48]. Furthermore, only finite-size interfacesallow examining system size effects for a given solid surface.Although cylindrical drops (non-zero apex curvature and one ofthe principal radii of curvature equal to zero) are regularlyproposed in literature [14,36,37,49,50], their experimentalaccomplishment becomes an intricate task. Instead, sphericaldrops become more realistic physically and moreover, none oftheir curvatures is zero. In addition, the model might be readilyextended to “pancake” drops (zero apex curvature), in order toinclude gravity effects [47].
In practice, spherical cap is employed when the drop size issmall enough and so the gravity effects can be negligible. Interms of characteristic lengths, this happens when the capillarylength (l0 ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiglv= qgð Þp
) is much larger than the apex curvatureradius of drop, Rap. Here, γlv is the surface tension at liquid–vapor interface, ρ the liquid density and g the constant of localgravitational acceleration. Indeed, sessile drops are nearlyspherical when their volume V is not greater than 0.02l0
3, re-gardless of contact angle value (see Appendix A).
Several authors [51,52] have reported that, even though thedrop shape may be significantly altered, the effect of gravityon thermodynamic contact angle is not relevant within theclassical theories of capillarity [53]. The energy contributionof those body forces, such as gravity (not dependent on thederivative of the drop profile), to the SLV system does notalter to the boundary condition, namely the local Young'sequation (see Section 2.4). In conclusion, the analysis of CAHcan be performed upon gravity-free conditions.
2.2. Axially-patterned heterogeneity
Once the model of liquid–vapor interface is selected, theheterogeneity pattern should be conveniently described to
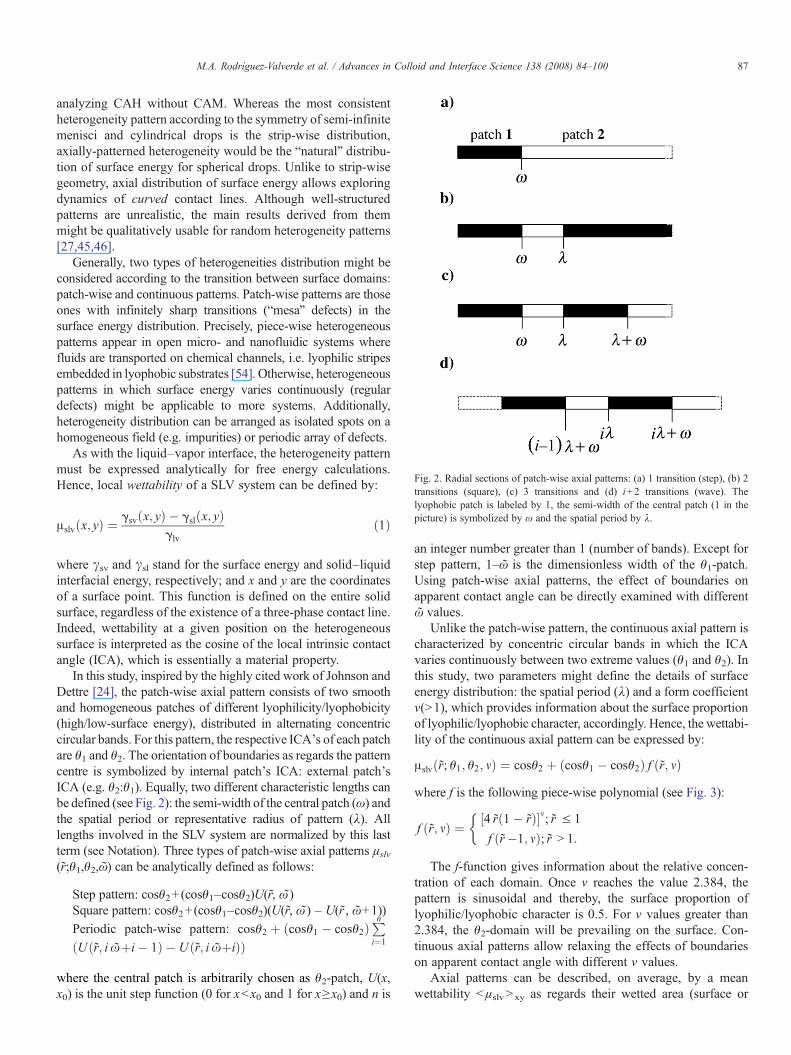
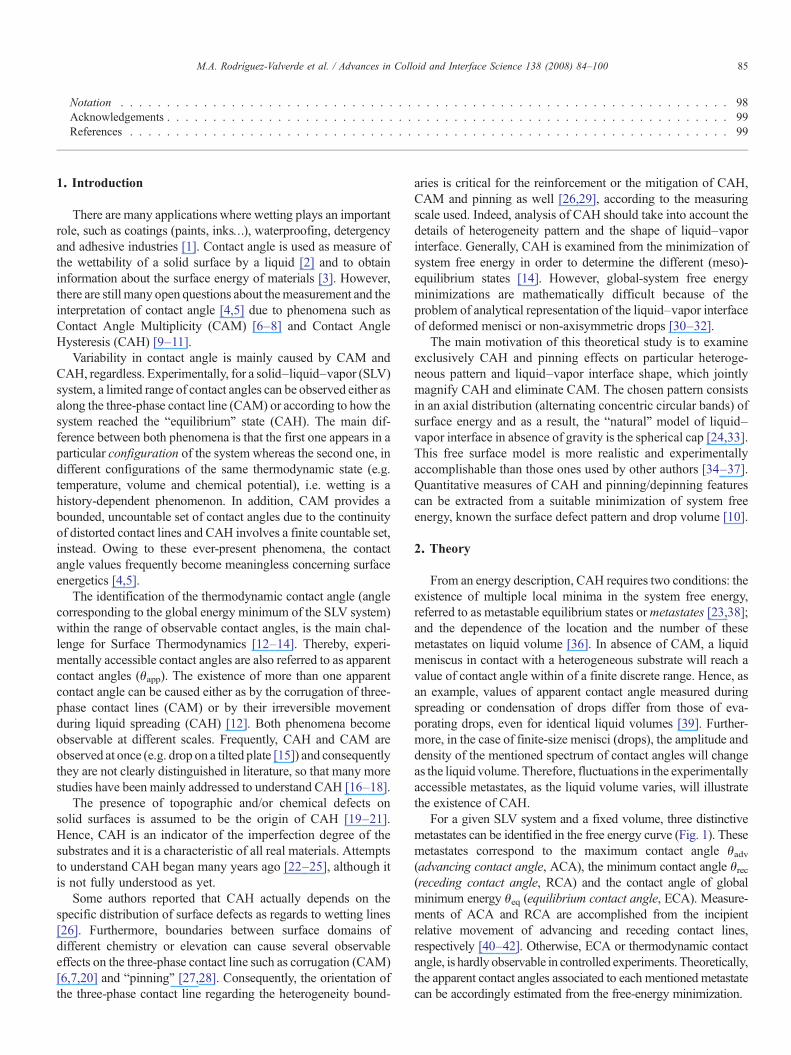
Fig. 2. Radial sections of patch-wise axial patterns: (a) 1 transition (step), (b) 2transitions (square), (c) 3 transitions and (d) i+2 transitions (wave). Thelyophobic patch is labeled by 1, the semi-width of the central patch (1 in thepicture) is symbolized by ω and the spatial period by λ.
87M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
analyzing CAH without CAM. Whereas the most consistentheterogeneity pattern according to the symmetry of semi-infinitemenisci and cylindrical drops is the strip-wise distribution,axially-patterned heterogeneity would be the “natural” distribu-tion of surface energy for spherical drops. Unlike to strip-wisegeometry, axial distribution of surface energy allows exploringdynamics of curved contact lines. Although well-structuredpatterns are unrealistic, the main results derived from themmight be qualitatively usable for random heterogeneity patterns[27,45,46].
Generally, two types of heterogeneities distribution might beconsidered according to the transition between surface domains:patch-wise and continuous patterns. Patch-wise patterns are thoseones with infinitely sharp transitions (“mesa” defects) in thesurface energy distribution. Precisely, piece-wise heterogeneouspatterns appear in open micro- and nanofluidic systems wherefluids are transported on chemical channels, i.e. lyophilic stripesembedded in lyophobic substrates [54]. Otherwise, heterogeneouspatterns in which surface energy varies continuously (regulardefects) might be applicable to more systems. Additionally,heterogeneity distribution can be arranged as isolated spots on ahomogeneous field (e.g. impurities) or periodic array of defects.
As with the liquid–vapor interface, the heterogeneity patternmust be expressed analytically for free energy calculations.Hence, local wettability of a SLV system can be defined by:
μslv x; yð Þ ¼ gsv x; yð Þ � gsl x; yð Þglv
ð1Þ
where γsv and γsl stand for the surface energy and solid–liquidinterfacial energy, respectively; and x and y are the coordinatesof a surface point. This function is defined on the entire solidsurface, regardless of the existence of a three-phase contact line.Indeed, wettability at a given position on the heterogeneoussurface is interpreted as the cosine of the local intrinsic contactangle (ICA), which is essentially a material property.
In this study, inspired by the highly cited work of Johnson andDettre [24], the patch-wise axial pattern consists of two smoothand homogeneous patches of different lyophilicity/lyophobicity(high/low-surface energy), distributed in alternating concentriccircular bands. For this pattern, the respective ICA's of each patchare θ1 and θ2. The orientation of boundaries as regards the patterncentre is symbolized by internal patch's ICA: external patch'sICA (e.g. θ2:θ1). Equally, two different characteristic lengths canbe defined (see Fig. 2): the semi-width of the central patch (ω) andthe spatial period or representative radius of pattern (λ). Alllengths involved in the SLV system are normalized by this lastterm (see Notation). Three types of patch-wise axial patterns µslv(r;θ1,θ2,ω) can be analytically defined as follows:
Step pattern: cosθ2+(cosθ1–cosθ2)U(r, ω )Square pattern: cosθ2+(cosθ1–cosθ2)(U(r, ω ) – U(r , ω+1))
Periodic patch-wise pattern: cosθ2 þ ðcosθ1 � cosθ2ÞPni¼1ðUðr; i xþi� 1Þ � Uðr; i xþiÞÞ
where the central patch is arbitrarily chosen as θ2-patch, U(x,x0) is the unit step function (0 for xbx0 and 1 for x≥x0) and n is
an integer number greater than 1 (number of bands). Except forstep pattern, 1–ω is the dimensionless width of the θ1-patch.Using patch-wise axial patterns, the effect of boundaries onapparent contact angle can be directly examined with differentω values.
Unlike the patch-wise pattern, the continuous axial pattern ischaracterized by concentric circular bands in which the ICAvaries continuously between two extreme values (θ1 and θ2). Inthis study, two parameters might define the details of surfaceenergy distribution: the spatial period (λ) and a form coefficientν(N1), which provides information about the surface proportionof lyophilic/lyophobic character, accordingly. Hence, the wettabi-lity of the continuous axial pattern can be expressed by:
μslv r; θ1; θ2; mð Þ ¼ cosθ2 þ cosθ1 � cosθ2ð Þ f r; mð Þwhere f is the following piece-wise polynomial (see Fig. 3):
f r; mð Þ ¼ 4 r 1� rð Þ½ �m; r V 1
f r�1; mð Þ; r N 1:
�
The f-function gives information about the relative concen-tration of each domain. Once ν reaches the value 2.384, thepattern is sinusoidal and thereby, the surface proportion oflyophilic/lyophobic character is 0.5. For ν values greater than2.384, the θ2-domain will be prevailing on the surface. Con-tinuous axial patterns allow relaxing the effects of boundarieson apparent contact angle with different ν values.
Axial patterns can be described, on average, by a meanwettability bµslvN xy as regards their wetted area (surface or
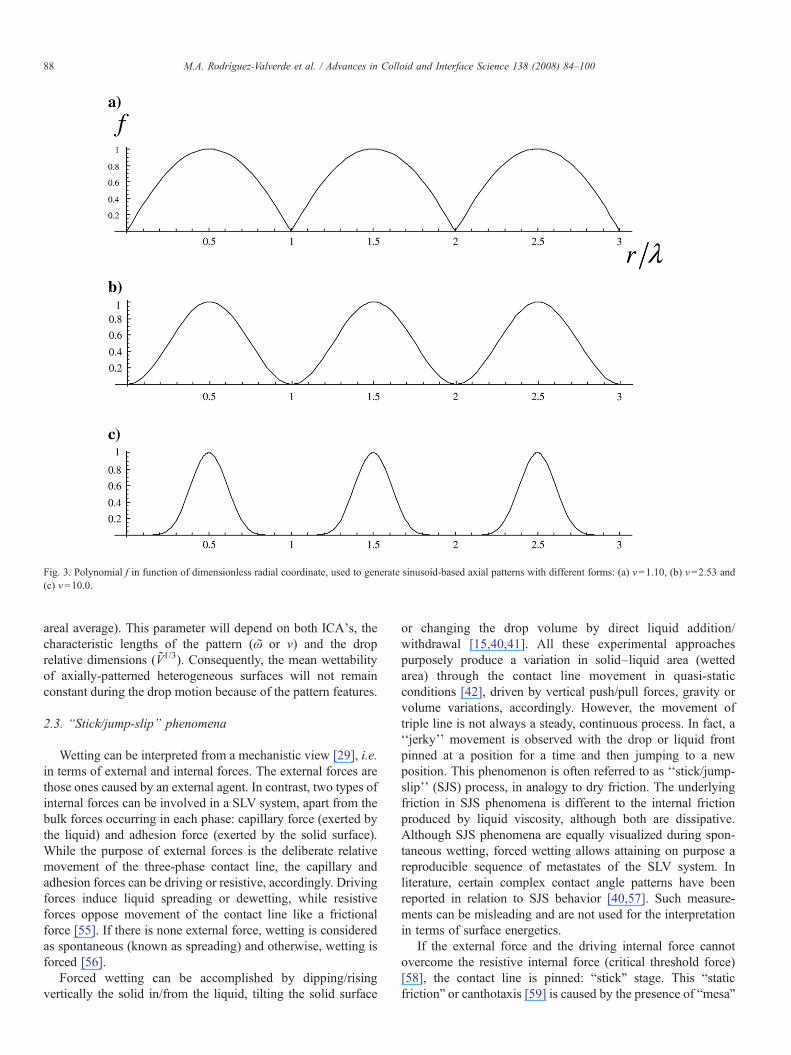
Fig. 3. Polynomial f in function of dimensionless radial coordinate, used to generate sinusoid-based axial patterns with different forms: (a) ν=1.10, (b) ν=2.53 and(c) ν=10.0.
88 M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
areal average). This parameter will depend on both ICA's, thecharacteristic lengths of the pattern (ω or ν) and the droprelative dimensions (V1/3). Consequently, the mean wettabilityof axially-patterned heterogeneous surfaces will not remainconstant during the drop motion because of the pattern features.
2.3. “Stick/jump-slip” phenomena
Wetting can be interpreted from a mechanistic view [29], i.e.in terms of external and internal forces. The external forces arethose ones caused by an external agent. In contrast, two types ofinternal forces can be involved in a SLV system, apart from thebulk forces occurring in each phase: capillary force (exerted bythe liquid) and adhesion force (exerted by the solid surface).While the purpose of external forces is the deliberate relativemovement of the three-phase contact line, the capillary andadhesion forces can be driving or resistive, accordingly. Drivingforces induce liquid spreading or dewetting, while resistiveforces oppose movement of the contact line like a frictionalforce [55]. If there is none external force, wetting is consideredas spontaneous (known as spreading) and otherwise, wetting isforced [56].
Forced wetting can be accomplished by dipping/risingvertically the solid in/from the liquid, tilting the solid surface
or changing the drop volume by direct liquid addition/withdrawal [15,40,41]. All these experimental approachespurposely produce a variation in solid–liquid area (wettedarea) through the contact line movement in quasi-staticconditions [42], driven by vertical push/pull forces, gravity orvolume variations, accordingly. However, the movement oftriple line is not always a steady, continuous process. In fact, a‘‘jerky’’ movement is observed with the drop or liquid frontpinned at a position for a time and then jumping to a newposition. This phenomenon is often referred to as ‘‘stick/jump-slip’’ (SJS) process, in analogy to dry friction. The underlyingfriction in SJS phenomena is different to the internal frictionproduced by liquid viscosity, although both are dissipative.Although SJS phenomena are equally visualized during spon-taneous wetting, forced wetting allows attaining on purpose areproducible sequence of metastates of the SLV system. Inliterature, certain complex contact angle patterns have beenreported in relation to SJS behavior [40,57]. Such measure-ments can be misleading and are not used for the interpretationin terms of surface energetics.
If the external force and the driving internal force cannotovercome the resistive internal force (critical threshold force)[58], the contact line is pinned: “stick” stage. This “staticfriction” or canthotaxis [59] is caused by the presence of “mesa”

89M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
defects, and the critical threshold force will be proportional tothe defect strength (wettability contrast). The transition from apinned to a moving contact line is called depinning and sub-sequently, the contact line usually moves in a “slip” stage afterthe stick stage.
Regardless of the action of external forces, if the resistiveforces vanish in favor of the driving force, the contact lineperforms a sudden jump: “jump” stage. The jump magnitude isproportional to the wettability contrast, although unlike to the“stick” stage, the contact line leap is equally observed on“mesa” and regular defects as well. Afterwards this jump, a“slip” stage is usually expected according to the size, strengthand density of defects.
All SJS phenomena can be justified from energeticalarguments [16]. For the particular case of sessile drop, anincrease or decrease of drop volume modifies the form of thefree-energy curve (Fig. 1) and so, the positions and number ofmetastates [13]. Consequently, when an axisymmetric drop is ina metastable position and its volume changes, a new metastate(i.e. metastable configuration) is attained in the new thermo-dynamic state. If the transition between metastates is reversibleand the contact radius remains constant, the drop holds a stickstage with the new volume. If the transition is reversible and theapparent contact angle remains constant, a slip stage isobserved. Otherwise, if the transition is irreversible or bothcontact radius and contact angle change, the drop undergoes ajump. The significance of this jump draws to claim a moredetailed explanation.
Owing to their local minimum condition, all metastates areseparated by energy barriers (local maxima) [43,60,61].According to Fig. 1, there is an energy barrier between eachtwo adjacent metastate positions. This local maximum isinterpreted as an unstable equilibrium position, since if thedrop's contact line were slightly disturbed the driving forces(due to adhesion and/or capillarity) would tend to displace theSLV system suddenly to the adjacent metastate position. Thisirreversible transition is observed as an unexpected jump of thecontact line.
Drops with CAM, whose triple lines consist of pinned andunpinned regions, can overcome more than one metastate due tothe sudden liberation of elastic energy stored by the liquid–vapor interface deformation [19]. In fact, when the SLV systemexhibits CAM, a notable feature of contact lines is theiranomalous elasticity, like a spring with surface tension asrestoring force [25]. Depending on the size, density and strengthof surface defects, a jump stage might be followed by stick, slipor another jump, accordingly. Hydrodynamics effects and theenvironment vibrational energy can reinforce the chaotic jerkymotion of drop contact lines.
2.4. The local Young equation
The local Young equation represents the equality betweenthe apparent contact angle and the ICA at each point of thethree-phase contact line, unless that contact line pinning [27,28]or line tension effects [62] were considered. Using either asmechanistic approaches [52] or calculus variational derivations
[51], provided that the triple line is not pinned at some locationon the substrate, the local Young equation is derived as a“natural” boundary condition:
cosθapp ¼ μslv xc; ycð Þ ð2Þwhere (xc, yc) is any surface point of the contact line. Indeed,ICA is also referred to as local Young contact angle becauseeach surface chemical domain is an ideal solid surface atmesoscopic scale. The local Young Eq. (2) can explain SJSphenomena [16], as mentioned in Section 3.2. However, thelocal Young equation is associated to whatever metastate of theSLV system, instead of to the global equilibrium state. Althoughthe local Young equation is necessary condition for the globalequilibrium since it was derived from the local extremumcondition of energy (critical point), it is not sufficient condition.The local Young equation is always fulfilled far from sharpboundaries. Otherwise, the local Young equation is notapplicable at sharp boundaries where the contact line is partiallyor entirely pinned according to the boundary orientation [6]. Inthe case of sharp boundaries oriented obliquely to the wettingfront, the requirement of mathematical continuity for theinterfacial curvature (i.e. the rate of change of slope iseverywhere finite) apparently violates the local Young equationover each boundary due to the discontinuity in the ICA [32].Indeed, this result is the violation of the assumption of mode-rately curved interfaces upon which the classical Laplace–Young and Young equations are based [44]. Line tension relaxesthis violation because it tends to flatten out the contortions ofthe contact line. In continuous heterogeneity patterns, themoderate distortion of the liquid–vapor interface imposed bythe local Young equation is propagated to the apparent contactangle and in consequence, CAM is observed. However, whenthe heterogeneity fluctuations oscillate with a characteristiclength much smaller than the drop size, macroscopically thelocal Young equation is not hold since the interfacial distortionlength, of the same order than the heterogeneity scale, becomesexperimentally indiscernible.
2.5. Equilibrium contact angle
Thermodynamic contact angle (ECA) is hardly measured ina reproducible manner. Close to the global energy minimum, theenergy barriers become generally higher and the neighbormetastates exhibit similar values of energy [34,35,63], as shownin Fig. 1. Furthermore, free energy curves and accordingly, thedistribution (density, positions) of the mentioned barriersdepend on the geometry of the liquid–vapor interface [63].This would partially explain the discrepancies reported in theliterature between meniscus-based methods (e.g. Wilhelmybalance) and drop-based techniques [41,64], and furthermore,between sessile drop and captive bubble methods [16,39,65].Nevertheless, the estimation of ECA is essential for themeaningful interpretation of contact angle measurements [5,66].Several methods were suggested in the literature to calculateECA, although their use becomes a controversial issue yet. Forheterogeneous surfaces, the average of the values of ACA andRCA [4] or of both cosines [67] has been repeatedly proposed.

90 M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
Kamusewitz et al. [68,69] suggested, as estimate of the Youngcontact angle of homogeneous rough surfaces (i.e. ECA of anideal solid surface), the extrapolated value of the apparentcontact angle at null hysteresis using the best-fit straight lines ofACA and RCA in terms of the difference of both. Recently,some authors have reported that thermodynamic contact anglecan be experimentally accessible through the vibration-inducedrelaxation of the SLV system [60,70,71]. Nevertheless, theCassie equation [72] is currently the equation just involvingECA for smooth heterogeneous surfaces.
The Cassie equation predicts the ECA from the ICA's andthe characteristic lengths of the heterogeneity pattern, for dropsizes much greater than heterogeneity scale or evenly hetero-geneous surfaces. Although the Cassie equation does not takeinto account the metastates of the solid surface introduced byheterogeneity, it is in fact a proof of the thermodynamicsignificance of ECA. Hence, for a patch-wise axial pattern asdescribed in Section 2.2, the Cassie equation reads:
cosθeq ¼ 1� xð Þcosθ1 þ xcosθ2 ð3Þwhich is equally valid for strip-wise patterns with sharp bandsperpendicular to the liquid spreading direction andwith theθ2-bandof width ω [34]. Since the Cassie equation is only applicable whenthe liquid volume is much greater than the characteristic size of theheterogeneity (V1/3≫1), the Cassie equation might be rewritten interms of mean wettability, as follows:
cosθeq ¼ limffiffiffiV
3p
≫1
hμslvixy: ð4Þ
Although the mean wettability is involved in Eq. (4), it is notclear that ECA is determined by the wetted solid area for anyliquid volume or characteristic size of heterogeneity this way.
According to Eq. (2), the apparent contact angles are deter-mined exclusively by the wettability of the surface at the dropcontact line. The mean wettability over the solid surface area isuseful in describing the uniformity of heterogeneous surfaces.Hence, for non-uniformly heterogeneous patterns like axialones, the mean wettability changes as the solid–liquid areaduring the forced wetting while in the limit V1/3≫1, its valuecoincides to the wettability averaged over the three-phase line.Furthermore, if the mean wettability changes as the solid–liquidarea, the metastates will likely change in position and number.Although contact lines and not contact areas are important fordetermining apparent contact angle [46,73,74], the variation orconstancy of the mean wettability bµslvN xy generally allowsgathering about the existence of CAH.
Truly equilibrium drops placed on a piece-wise axial patternshould always attain a stick stage. As above mentioned inSection 2.4, the local Young equation is fulfilled far from sharpboundaries. Since ECA value must be between RCA and ACAvalues and these angles coincide with the ICA's of a two-patchpattern, a drop upon thermodynamic equilibrium should benecessarily pinned in a θ2:θ1 boundary (θ2bθ1). Instead, atruly-equilibrium drop on continuous axial patterns sustains adefinite position between the centers of two adjacent patches.Consequently, according to the local Young equation, the valueof ECA will match a local ICA of the continuous pattern.
Nevertheless, this coincidence is actually a built-in artifact ofthe axial pattern. Generally, in systems with CAM, ECA is notan observable contact angle but it is an unlocated, effectivecontact angle.
3. Methods
3.1. Free-energy minimization
The present energetical approach does not assume explicitlythe validity of the local Young Eq. (2), because it emerges asresult. Johnson and Dettre assumed three hypothesis in theirwork [24], aside from gravity-free environment: drop sizemuch greater than separation of patches (V1/3≫1), patch-wisepatterns and that the contact line was constrained betweenhydrophilic-hydrophobic patches. The last assumption impli-citly involved the validity of the local Young equation, aspointed out in Section 5. Instead, in the current study, thecalculations were performed for any V1/3 value, patch-wise andcontinuous heterogeneity patterns and without any constraint onthe three-phase contact line.
No considerations about hydrodynamics of contact line andbarrier energies were taken into account in this study. In fact, forlow capillary numbers [42], the viscous deformation is assumedto be negligible. By the other hand, even though the inter-pretation of CAH in terms of energy barriers can be generallyinstructive [24,43,61], energy barriers should be proportional tothe total length of the triple line [29]. In this work, no cal-culations of energy barriers between two different configura-tions of drop were performed.
The dimensionless free energy Fslv of a SLV system formed bya spherical drop of dimensionless volume V and apparent contactangle θapp, placed on an axially heterogeneous pattern with meanwettability bµslvN xy, according to Eq. (A.3), is expressed by:
Fslv θapp� � ¼ ffiffiffiffiffiffi
9π3p ffiffiffiffiffi
V23p 2� hμslvixy 1þ cosθapp
� �ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� cosθapp� �
2þ cosθapp� �23
q : ð5Þ
Once expressed the free energy in terms of apparent contactangle, it was analytically evaluated for different drop-substratecombinations (i.e. drop volume and characteristic lengths ofpattern). Next, the respective metastates of each case werefound using a local minima location on the free-energy curve.This minimization was numerically performed using theMathematica® command FindMinimum which employs quasi-Newton methods [75]. Within the set of metastates, the singularmetastates (ACA, RCA and ECA) were identified according tothe definitions mentioned in Section 1. This identificationassumed implicitly that there was no internal energy in the SLVsystem and in consequence, the possible jump stages did nottake place till they were inevitable.
As the drop volume was gradually increased, ACA waslocated at those metastates where the drop contact radiusremained constant or increased, from a minimum contributionof energy (no internal energy). Namely, the minimum energymetastate was selected between those metastates for which thecontact radius was fixed or increased, accordingly. Conversely,
91M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
RCA was located at those minimum energy metastates wherecontact radius did not increase for decreasing volumes. Finally,ECA was straightforwardly found at the global minimum ofenergy. For each drop volume, all output values were recordedin a datafile for displaying.
3.2. Heuristic model for patch-wise patterns
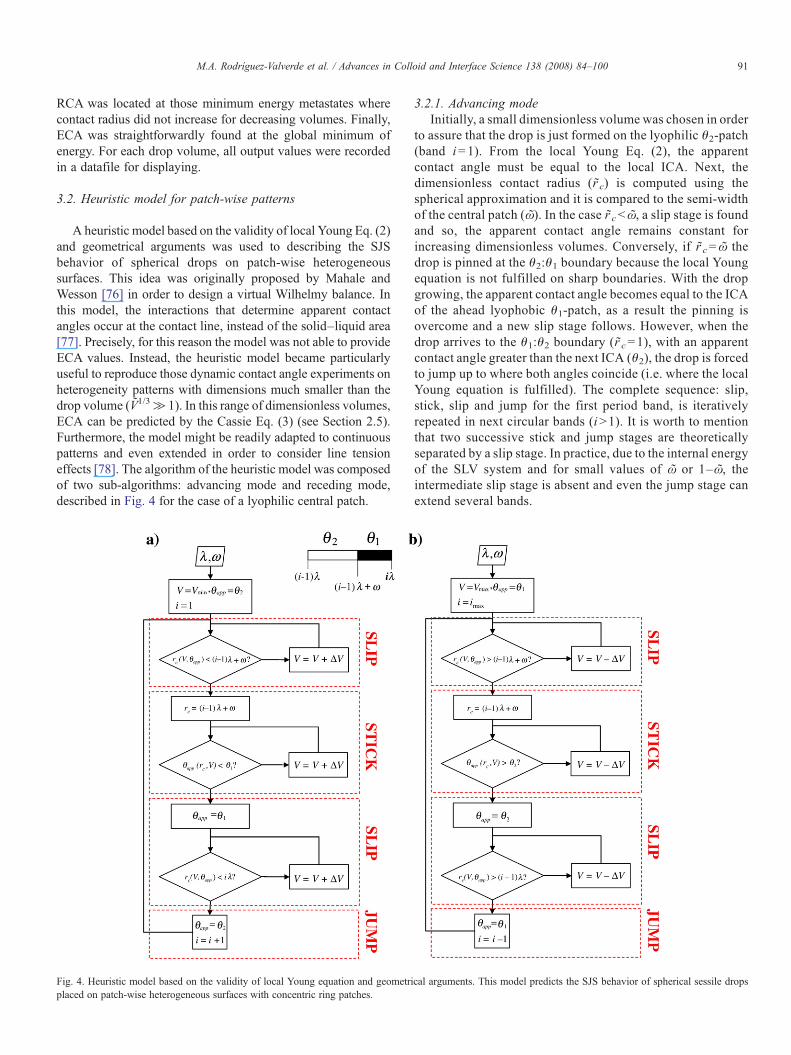
A heuristic model based on the validity of local Young Eq. (2)and geometrical arguments was used to describing the SJSbehavior of spherical drops on patch-wise heterogeneoussurfaces. This idea was originally proposed by Mahale andWesson [76] in order to design a virtual Wilhelmy balance. Inthis model, the interactions that determine apparent contactangles occur at the contact line, instead of the solid–liquid area[77]. Precisely, for this reason the model was not able to provideECA values. Instead, the heuristic model became particularlyuseful to reproduce those dynamic contact angle experiments onheterogeneity patterns with dimensions much smaller than thedrop volume (V1/3≫1). In this range of dimensionless volumes,ECA can be predicted by the Cassie Eq. (3) (see Section 2.5).Furthermore, the model might be readily adapted to continuouspatterns and even extended in order to consider line tensioneffects [78]. The algorithm of the heuristic model was composedof two sub-algorithms: advancing mode and receding mode,described in Fig. 4 for the case of a lyophilic central patch.
Fig. 4. Heuristic model based on the validity of local Young equation and geometriplaced on patch-wise heterogeneous surfaces with concentric ring patches.
3.2.1. Advancing modeInitially, a small dimensionless volume was chosen in order
to assure that the drop is just formed on the lyophilic θ2-patch(band i=1). From the local Young Eq. (2), the apparentcontact angle must be equal to the local ICA. Next, thedimensionless contact radius (r c) is computed using thespherical approximation and it is compared to the semi-widthof the central patch (ω). In the case r cb ω, a slip stage is foundand so, the apparent contact angle remains constant forincreasing dimensionless volumes. Conversely, if r c= ω thedrop is pinned at the θ2:θ1 boundary because the local Youngequation is not fulfilled on sharp boundaries. With the dropgrowing, the apparent contact angle becomes equal to the ICAof the ahead lyophobic θ1-patch, as a result the pinning isovercome and a new slip stage follows. However, when thedrop arrives to the θ1:θ2 boundary (r c=1), with an apparentcontact angle greater than the next ICA (θ2), the drop is forcedto jump up to where both angles coincide (i.e. where the localYoung equation is fulfilled). The complete sequence: slip,stick, slip and jump for the first period band, is iterativelyrepeated in next circular bands (iN1). It is worth to mentionthat two successive stick and jump stages are theoreticallyseparated by a slip stage. In practice, due to the internal energyof the SLV system and for small values of ω or 1–ω, theintermediate slip stage is absent and even the jump stage canextend several bands.
cal arguments. This model predicts the SJS behavior of spherical sessile drops
92 M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
3.2.2. Receding modeFrom the maximum dimensionless volume reached in
advancing mode (band imax), receding mode begins. In general,a slip stage occurs during the drop shrinking if the drop beginsto recede far from any boundary, regardless of the departurepatch. The calculations are performed similarly to advancingmode. However, in receding mode, the jump stage happenswhen the drop is on a θ1:θ2 boundary and in consequence, theapparent contact angle is equal to θ2. The stick stage appearswhen the drop, in receding mode, rests just on a θ2:θ1 boundarywith an apparent contact angle greater than θ2. The recedingmode is finished once the dimensionless volume reaches theinitial value of the advancing mode.
4. Results
In this work, four different axial patterns were studied: threepatch-wise surface energy distributions (step, square andperiodic array) and one sinusoid-based pattern. The extremevalues of ICAwere fixed to θ1=128.0° and θ2=57.5° in order to
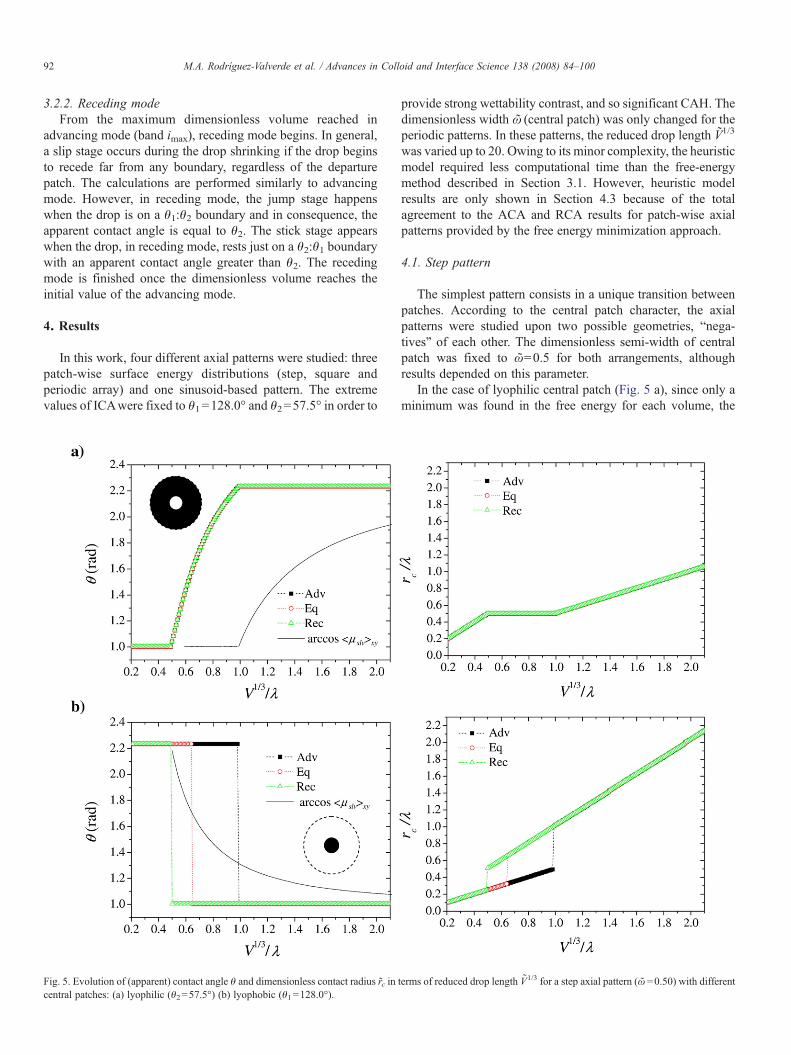
Fig. 5. Evolution of (apparent) contact angle θ and dimensionless contact radius rc incentral patches: (a) lyophilic (θ2=57.5°) (b) lyophobic (θ1=128.0°).
provide strong wettability contrast, and so significant CAH. Thedimensionless width ω (central patch) was only changed for theperiodic patterns. In these patterns, the reduced drop length V1/3
was varied up to 20. Owing to its minor complexity, the heuristicmodel required less computational time than the free-energymethod described in Section 3.1. However, heuristic modelresults are only shown in Section 4.3 because of the totalagreement to the ACA and RCA results for patch-wise axialpatterns provided by the free energy minimization approach.
4.1. Step pattern
The simplest pattern consists in a unique transition betweenpatches. According to the central patch character, the axialpatterns were studied upon two possible geometries, “nega-tives” of each other. The dimensionless semi-width of centralpatch was fixed to ω=0.5 for both arrangements, althoughresults depended on this parameter.
In the case of lyophilic central patch (Fig. 5 a), since only aminimum was found in the free energy for each volume, the
terms of reduced drop length V1/3 for a step axial pattern (ω =0.50) with different
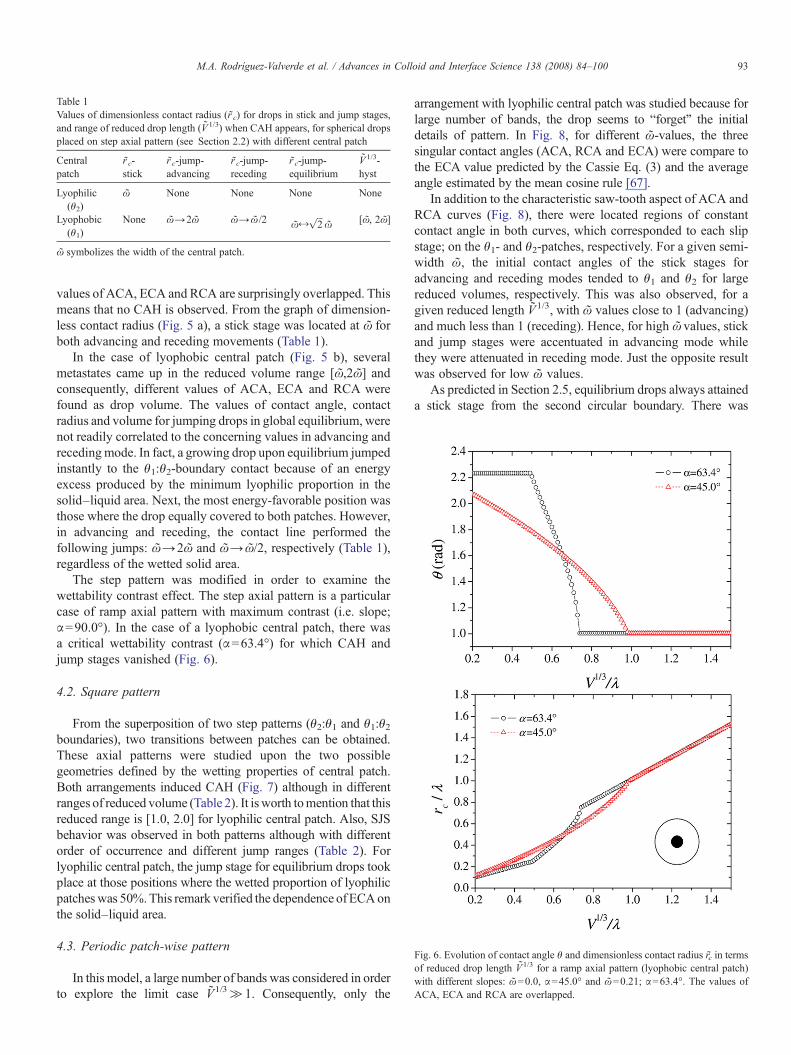
Table 1Values of dimensionless contact radius (r c) for drops in stick and jump stages,and range of reduced drop length (V 1/3) when CAH appears, for spherical dropsplaced on step axial pattern (see Section 2.2) with different central patch
Centralpatch
r c-stick
r c-jump-advancing
r c-jump-receding
r c-jump-equilibrium
V 1/3-hyst
Lyophilic(θ2)
ω None None None None
Lyophobic(θ1)
None ω→2ω ω→ ω/2 x Xffiffiffi2
px [ω, 2ω]
ω symbolizes the width of the central patch.
Fig. 6. Evolution of contact angle θ and dimensionless contact radius rc in termsof reduced drop length V1/3 for a ramp axial pattern (lyophobic central patch)with different slopes: ω=0.0, α=45.0° and ω=0.21; α=63.4°. The values ofACA, ECA and RCA are overlapped.
93M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
values of ACA, ECA and RCA are surprisingly overlapped. Thismeans that no CAH is observed. From the graph of dimension-less contact radius (Fig. 5 a), a stick stage was located at ω forboth advancing and receding movements (Table 1).
In the case of lyophobic central patch (Fig. 5 b), severalmetastates came up in the reduced volume range [ω,2ω] andconsequently, different values of ACA, ECA and RCA werefound as drop volume. The values of contact angle, contactradius and volume for jumping drops in global equilibrium, werenot readily correlated to the concerning values in advancing andrecedingmode. In fact, a growing drop upon equilibrium jumpedinstantly to the θ1:θ2-boundary contact because of an energyexcess produced by the minimum lyophilic proportion in thesolid–liquid area. Next, the most energy-favorable position wasthose where the drop equally covered to both patches. However,in advancing and receding, the contact line performed thefollowing jumps: ω→2ω and ω→ ω/2, respectively (Table 1),regardless of the wetted solid area.
The step pattern was modified in order to examine thewettability contrast effect. The step axial pattern is a particularcase of ramp axial pattern with maximum contrast (i.e. slope;α=90.0°). In the case of a lyophobic central patch, there wasa critical wettability contrast (α=63.4°) for which CAH andjump stages vanished (Fig. 6).
4.2. Square pattern
From the superposition of two step patterns (θ2:θ1 and θ1:θ2boundaries), two transitions between patches can be obtained.These axial patterns were studied upon the two possiblegeometries defined by the wetting properties of central patch.Both arrangements induced CAH (Fig. 7) although in differentranges of reduced volume (Table 2). It isworth tomention that thisreduced range is [1.0, 2.0] for lyophilic central patch. Also, SJSbehavior was observed in both patterns although with differentorder of occurrence and different jump ranges (Table 2). Forlyophilic central patch, the jump stage for equilibrium drops tookplace at those positions where the wetted proportion of lyophilicpatcheswas 50%.This remark verified the dependence of ECAonthe solid–liquid area.
4.3. Periodic patch-wise pattern
In this model, a large number of bands was considered in orderto explore the limit case V1/3≫1. Consequently, only the
arrangement with lyophilic central patch was studied because forlarge number of bands, the drop seems to “forget” the initialdetails of pattern. In Fig. 8, for different ω-values, the threesingular contact angles (ACA, RCA and ECA) were compare tothe ECA value predicted by the Cassie Eq. (3) and the averageangle estimated by the mean cosine rule [67].
In addition to the characteristic saw-tooth aspect of ACA andRCA curves (Fig. 8), there were located regions of constantcontact angle in both curves, which corresponded to each slipstage; on the θ1- and θ2-patches, respectively. For a given semi-width ω, the initial contact angles of the stick stages foradvancing and receding modes tended to θ1 and θ2 for largereduced volumes, respectively. This was also observed, for agiven reduced length V1/3, with ω values close to 1 (advancing)and much less than 1 (receding). Hence, for high ω values, stickand jump stages were accentuated in advancing mode whilethey were attenuated in receding mode. Just the opposite resultwas observed for low ω values.
As predicted in Section 2.5, equilibrium drops always attaineda stick stage from the second circular boundary. There was
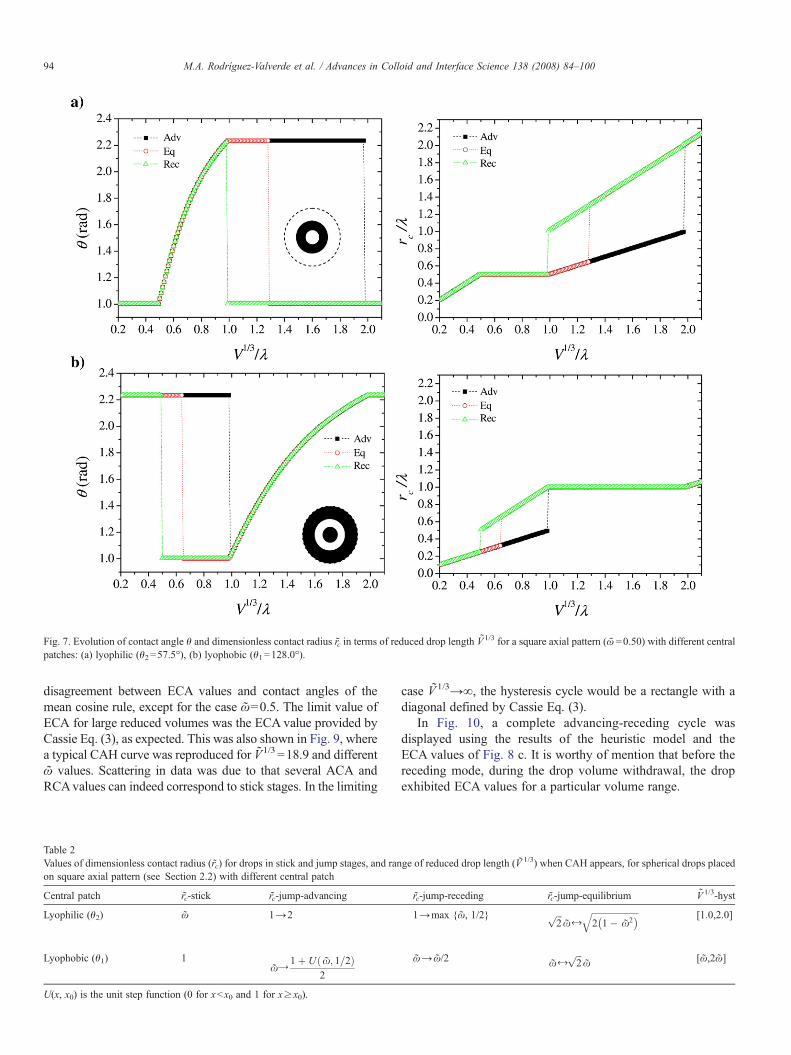
Fig. 7. Evolution of contact angle θ and dimensionless contact radius rc in terms of reduced drop length V 1/3 for a square axial pattern (ω =0.50) with different centralpatches: (a) lyophilic (θ2=57.5°), (b) lyophobic (θ1=128.0°).
94 M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
disagreement between ECA values and contact angles of themean cosine rule, except for the case ω=0.5. The limit value ofECA for large reduced volumes was the ECA value provided byCassie Eq. (3), as expected. This was also shown in Fig. 9, wherea typical CAH curve was reproduced for V1/3 =18.9 and differentω values. Scattering in data was due to that several ACA andRCAvalues can indeed correspond to stick stages. In the limiting
Table 2Values of dimensionless contact radius (rc) for drops in stick and jump stages, and ranon square axial pattern (see Section 2.2) with different central patch
Central patch rc-stick rc-jump-advancing
Lyophilic (θ2) ω 1→2
Lyophobic (θ1) 1xY
1þ U x; 1=2ð Þ2
U(x, x0) is the unit step function (0 for xbx0 and 1 for x≥x0).
case V 1/3→∞, the hysteresis cycle would be a rectangle with adiagonal defined by Cassie Eq. (3).
In Fig. 10, a complete advancing-receding cycle wasdisplayed using the results of the heuristic model and theECA values of Fig. 8 c. It is worthy of mention that before thereceding mode, during the drop volume withdrawal, the dropexhibited ECA values for a particular volume range.
ge of reduced drop length (V 1/3) when CAH appears, for spherical drops placed
rc-jump-receding rc-jump-equilibrium V 1/3-hyst
1→max {ω, 1/2} ffiffiffi2
px X
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi2 1� x2� �q [1.0,2.0]
ω→ ω/2 x Xffiffiffi2
px [ω,2ω]
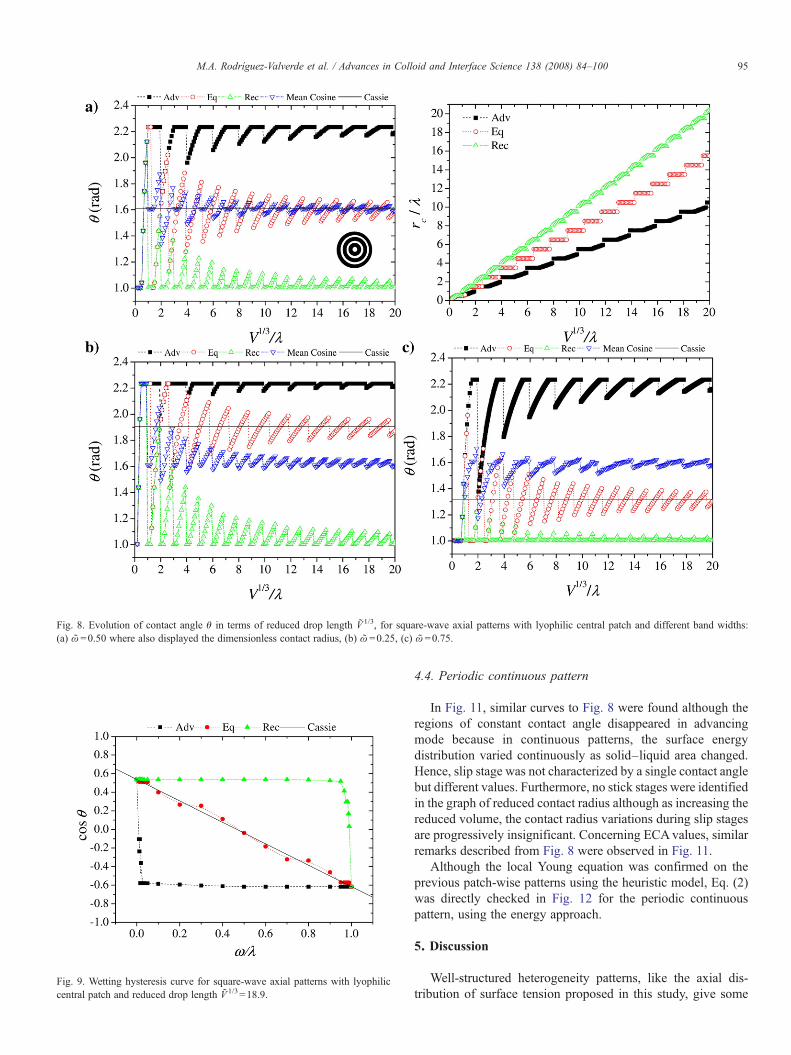
Fig. 8. Evolution of contact angle θ in terms of reduced drop length V1/3, for square-wave axial patterns with lyophilic central patch and different band widths:(a) ω =0.50 where also displayed the dimensionless contact radius, (b) ω =0.25, (c) ω =0.75.
Fig. 9. Wetting hysteresis curve for square-wave axial patterns with lyophiliccentral patch and reduced drop length V 1/3=18.9.
95M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
4.4. Periodic continuous pattern
In Fig. 11, similar curves to Fig. 8 were found although theregions of constant contact angle disappeared in advancingmode because in continuous patterns, the surface energydistribution varied continuously as solid–liquid area changed.Hence, slip stage was not characterized by a single contact anglebut different values. Furthermore, no stick stages were identifiedin the graph of reduced contact radius although as increasing thereduced volume, the contact radius variations during slip stagesare progressively insignificant. Concerning ECAvalues, similarremarks described from Fig. 8 were observed in Fig. 11.
Although the local Young equation was confirmed on theprevious patch-wise patterns using the heuristic model, Eq. (2)was directly checked in Fig. 12 for the periodic continuouspattern, using the energy approach.
5. Discussion
Well-structured heterogeneity patterns, like the axial dis-tribution of surface tension proposed in this study, give some
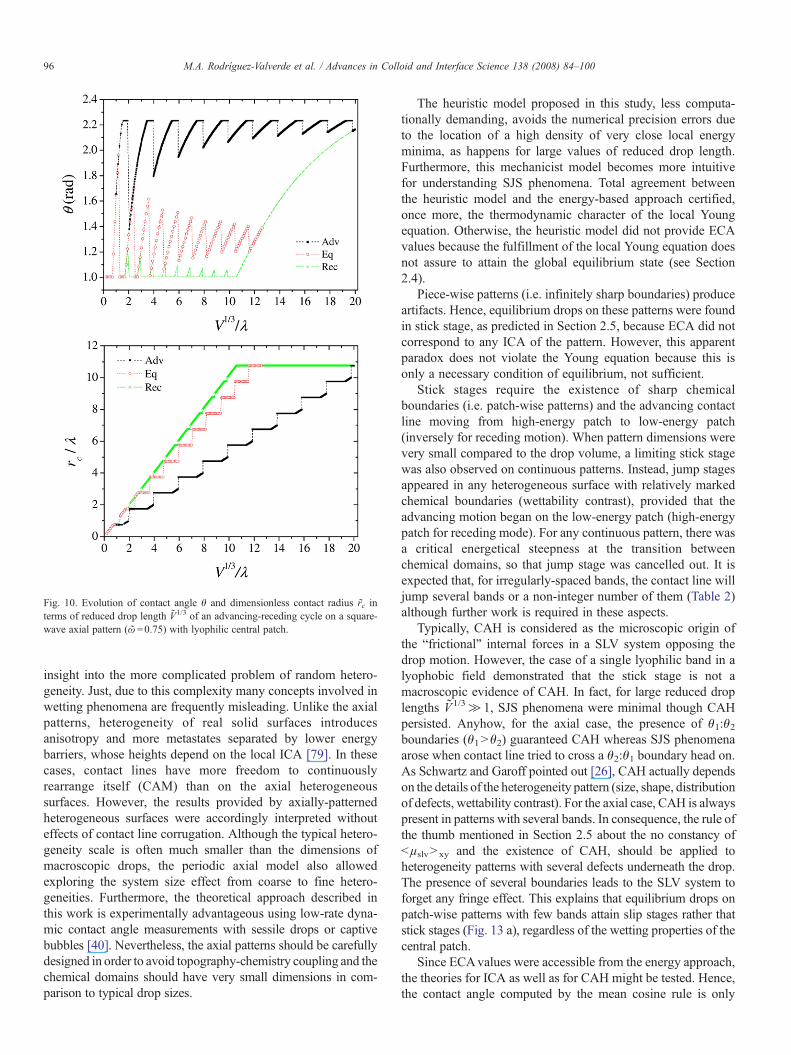
Fig. 10. Evolution of contact angle θ and dimensionless contact radius rc interms of reduced drop length V1/3 of an advancing-receding cycle on a square-wave axial pattern (ω =0.75) with lyophilic central patch.
96 M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
insight into the more complicated problem of random hetero-geneity. Just, due to this complexity many concepts involved inwetting phenomena are frequently misleading. Unlike the axialpatterns, heterogeneity of real solid surfaces introducesanisotropy and more metastates separated by lower energybarriers, whose heights depend on the local ICA [79]. In thesecases, contact lines have more freedom to continuouslyrearrange itself (CAM) than on the axial heterogeneoussurfaces. However, the results provided by axially-patternedheterogeneous surfaces were accordingly interpreted withouteffects of contact line corrugation. Although the typical hetero-geneity scale is often much smaller than the dimensions ofmacroscopic drops, the periodic axial model also allowedexploring the system size effect from coarse to fine hetero-geneities. Furthermore, the theoretical approach described inthis work is experimentally advantageous using low-rate dyna-mic contact angle measurements with sessile drops or captivebubbles [40]. Nevertheless, the axial patterns should be carefullydesigned in order to avoid topography-chemistry coupling and thechemical domains should have very small dimensions in com-parison to typical drop sizes.
The heuristic model proposed in this study, less computa-tionally demanding, avoids the numerical precision errors dueto the location of a high density of very close local energyminima, as happens for large values of reduced drop length.Furthermore, this mechanicist model becomes more intuitivefor understanding SJS phenomena. Total agreement betweenthe heuristic model and the energy-based approach certified,once more, the thermodynamic character of the local Youngequation. Otherwise, the heuristic model did not provide ECAvalues because the fulfillment of the local Young equation doesnot assure to attain the global equilibrium state (see Section2.4).
Piece-wise patterns (i.e. infinitely sharp boundaries) produceartifacts. Hence, equilibrium drops on these patterns were foundin stick stage, as predicted in Section 2.5, because ECA did notcorrespond to any ICA of the pattern. However, this apparentparadox does not violate the Young equation because this isonly a necessary condition of equilibrium, not sufficient.
Stick stages require the existence of sharp chemicalboundaries (i.e. patch-wise patterns) and the advancing contactline moving from high-energy patch to low-energy patch(inversely for receding motion). When pattern dimensions werevery small compared to the drop volume, a limiting stick stagewas also observed on continuous patterns. Instead, jump stagesappeared in any heterogeneous surface with relatively markedchemical boundaries (wettability contrast), provided that theadvancing motion began on the low-energy patch (high-energypatch for receding mode). For any continuous pattern, there wasa critical energetical steepness at the transition betweenchemical domains, so that jump stage was cancelled out. It isexpected that, for irregularly-spaced bands, the contact line willjump several bands or a non-integer number of them (Table 2)although further work is required in these aspects.
Typically, CAH is considered as the microscopic origin ofthe “frictional” internal forces in a SLV system opposing thedrop motion. However, the case of a single lyophilic band in alyophobic field demonstrated that the stick stage is not amacroscopic evidence of CAH. In fact, for large reduced droplengths V1/3≫1, SJS phenomena were minimal though CAHpersisted. Anyhow, for the axial case, the presence of θ1:θ2boundaries (θ1Nθ2) guaranteed CAH whereas SJS phenomenaarose when contact line tried to cross a θ2:θ1 boundary head on.As Schwartz and Garoff pointed out [26], CAH actually dependson the details of the heterogeneity pattern (size, shape, distributionof defects, wettability contrast). For the axial case, CAH is alwayspresent in patterns with several bands. In consequence, the rule ofthe thumb mentioned in Section 2.5 about the no constancy ofbµslvN xy and the existence of CAH, should be applied toheterogeneity patterns with several defects underneath the drop.The presence of several boundaries leads to the SLV system toforget any fringe effect. This explains that equilibrium drops onpatch-wise patterns with few bands attain slip stages rather thatstick stages (Fig. 13 a), regardless of the wetting properties of thecentral patch.
Since ECAvalues were accessible from the energy approach,the theories for ICA as well as for CAH might be tested. Hence,the contact angle computed by the mean cosine rule is only
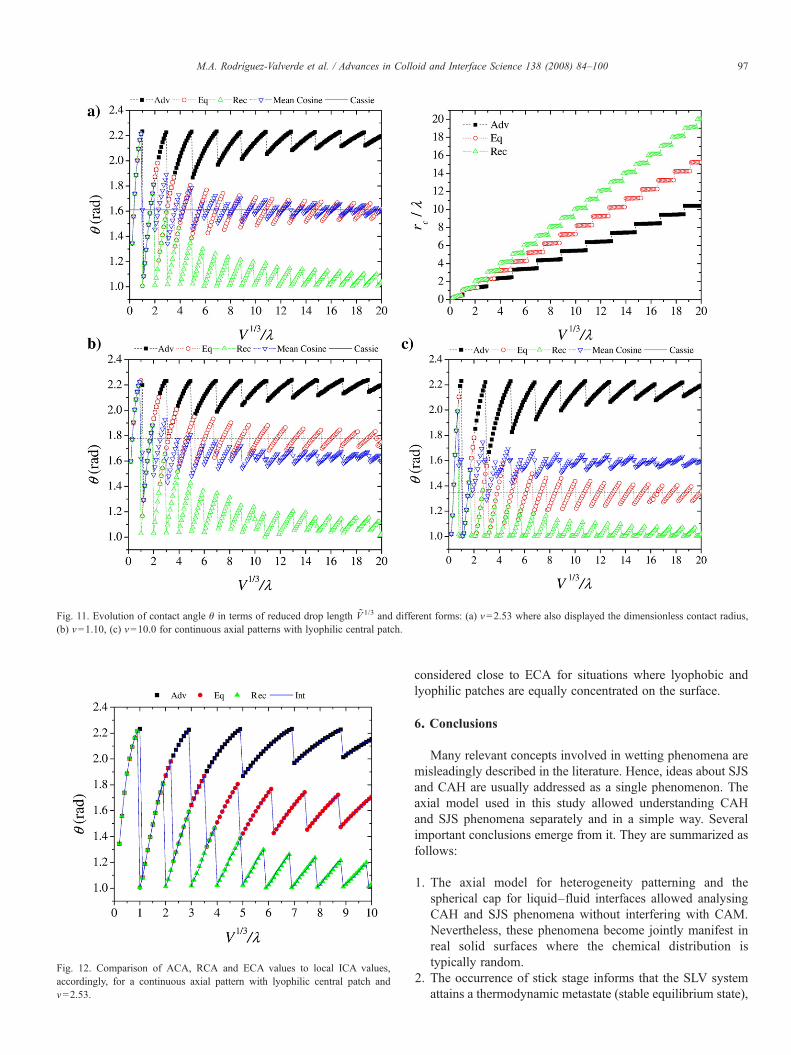
Fig. 11. Evolution of contact angle θ in terms of reduced drop length V 1/3 and different forms: (a) ν=2.53 where also displayed the dimensionless contact radius,(b) ν=1.10, (c) ν=10.0 for continuous axial patterns with lyophilic central patch.
Fig. 12. Comparison of ACA, RCA and ECA values to local ICA values,accordingly, for a continuous axial pattern with lyophilic central patch andν=2.53.
97M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
considered close to ECA for situations where lyophobic andlyophilic patches are equally concentrated on the surface.
6. Conclusions
Many relevant concepts involved in wetting phenomena aremisleadingly described in the literature. Hence, ideas about SJSand CAH are usually addressed as a single phenomenon. Theaxial model used in this study allowed understanding CAHand SJS phenomena separately and in a simple way. Severalimportant conclusions emerge from it. They are summarized asfollows:
1. The axial model for heterogeneity patterning and thespherical cap for liquid–fluid interfaces allowed analysingCAH and SJS phenomena without interfering with CAM.Nevertheless, these phenomena become jointly manifest inreal solid surfaces where the chemical distribution istypically random.
2. The occurrence of stick stage informs that the SLV systemattains a thermodynamic metastate (stable equilibrium state),
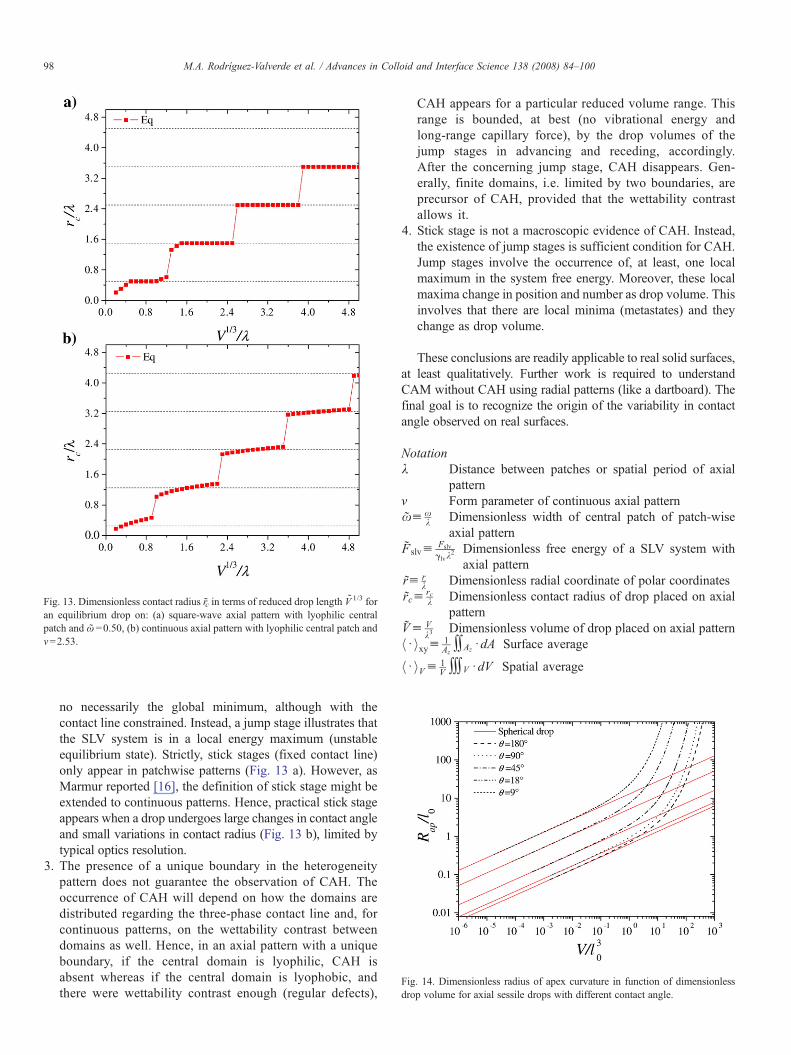
Fig. 13. Dimensionless contact radius rc in terms of reduced drop length V 1/3 foran equilibrium drop on: (a) square-wave axial pattern with lyophilic centralpatch and ω =0.50, (b) continuous axial pattern with lyophilic central patch andν=2.53.
Fig. 14. Dimensionless radius of apex curvature in function of dimensionlessdrop volume for axial sessile drops with different contact angle.
98 M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
no necessarily the global minimum, although with thecontact line constrained. Instead, a jump stage illustrates thatthe SLV system is in a local energy maximum (unstableequilibrium state). Strictly, stick stages (fixed contact line)only appear in patchwise patterns (Fig. 13 a). However, asMarmur reported [16], the definition of stick stage might beextended to continuous patterns. Hence, practical stick stageappears when a drop undergoes large changes in contact angleand small variations in contact radius (Fig. 13 b), limited bytypical optics resolution.
3. The presence of a unique boundary in the heterogeneitypattern does not guarantee the observation of CAH. Theoccurrence of CAH will depend on how the domains aredistributed regarding the three-phase contact line and, forcontinuous patterns, on the wettability contrast betweendomains as well. Hence, in an axial pattern with a uniqueboundary, if the central domain is lyophilic, CAH isabsent whereas if the central domain is lyophobic, andthere were wettability contrast enough (regular defects),
CAH appears for a particular reduced volume range. Thisrange is bounded, at best (no vibrational energy andlong-range capillary force), by the drop volumes of thejump stages in advancing and receding, accordingly.After the concerning jump stage, CAH disappears. Gen-erally, finite domains, i.e. limited by two boundaries, areprecursor of CAH, provided that the wettability contrastallows it.
4. Stick stage is not a macroscopic evidence of CAH. Instead,the existence of jump stages is sufficient condition for CAH.Jump stages involve the occurrence of, at least, one localmaximum in the system free energy. Moreover, these localmaxima change in position and number as drop volume. Thisinvolves that there are local minima (metastates) and theychange as drop volume.
These conclusions are readily applicable to real solid surfaces,at least qualitatively. Further work is required to understandCAM without CAH using radial patterns (like a dartboard). Thefinal goal is to recognize the origin of the variability in contactangle observed on real surfaces.
Notation
λ Distance between patches or spatial period of axialpatternν Form parameter of continuous axial patternxu x
k Dimensionless width of central patch of patch-wiseaxial pattern
Fslvu Fslv
glvk2 Dimensionless free energy of a SLV system withaxial pattern
ru rk Dimensionless radial coordinate of polar coordinates
rcu rck Dimensionless contact radius of drop placed on axial
patternVu V
k3Dimensionless volume of drop placed on axial pattern
hd ixyu 1Az∬Az d dA Surface average
hd iVu 1V ∭V d dV Spatial average

99M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
Acknowledgements
This work was supported by the “Ministerio Español deEducación y Ciencia” (project MAT2004-06872-C03-01 andcontract “Ramón y Cajal” 18-08-463B-750) and the EuropeanSocial Fund (ESF). We thank P. Gea-Jódar for his valuable andstimulating discussions.
Appendix A. Free energy of spherical drop on smoothheterogeneous surface
Strictly speaking, a spherical drop exhibits a finite radius ofapex curvature (Rapb∞) just in absence of gravity (l0→∞).However, in practice, this geometrical model might be usedupon more realistic conditions. Fig. 14 was built ad hoc from acompilation of numerical solutions of the Young–Laplaceequation for axisymmetric sessile drops. From this graph,the application limits of spherical cap approximation canbe determined. Hence, an axisymmetric drop which holdsV≤0.02l0
3, may be considered as a spherical cap. For any othercase with finite Rap values, the drop shape is only known fromthe numerical resolution of the Young–Laplace equation. It isworth to highlight that using spherical drop model, the freeenergy of a SLV system can be expressed in closed form andconsequently, the energy minimization can be performedstraightforward.
The Helmholtz free energy of a sessile drop of a pure liquidplaced over a smooth heterogeneous surface (SLV system) ingravity-free environment reads:
Fslv ¼ glv Alv � Aslhμslvixy� �
ðA:1Þ
where γlv stands for the surface tension, Alv the liquid–vaporarea, Asl the solid–liquid area and bµslvN xy the mean wettabilityover Asl domain. The expression (A.1) only contains those termsthat depend on the possible configurations of a drop withconstant volume (V) placed on a heterogeneous surface in asaturated atmosphere. Consequently, the total solid surfaceenergy (γsvAs) as well as the known Gibbs term – ΔP0V, whereΔP0 is the pressure difference along the liquid–vapor interface,are ignored in Eq. (A.1). This pressure is the Lagrange multiplierincluded in the system energy minimization for taking intoaccount the volume constraint. Moreover, even though smallsizes of drop are considered, the line tension contribution [62]has been neglected in the total energy of the system.
The aim is to express the system free energy in terms of meanwettability, drop volume and apparent contact angle. Aftersphere algebra, the solid–liquid and liquid–vapor areas of thespherical drop with volume V and apparent contact angle θappare given by:
Asl ¼ 1þ cosθapp� � ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
9πV 2
cosθapp þ 2� �2
1� cosθapp� �3
s
Alv ¼ 2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi9πV2
cosθapp þ 2� �2
1� cosθapp� �3
s8>>>>><>>>>>:
ðA:2Þ
Finally, the free energy given by Eq. (A.1) is rewritten fromboth areas of Eq. (A.2):
Fslv ¼ glvffiffiffiffiffiffi9π3
p ffiffiffiffiffiffiV23
p 2� hμslvixy 1þ cosθapp� �
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1� cosθapp� �
2þ cosθapp� �23
q : ðA:3Þ
Since a SLV system under “equilibrium” can only attain afinite number of values of θapp due to CAH, the free energy(A.3) is actually a discontinuous function.
References
[1] Good RJ. Contact-Angle, Wetting, and Adhesion - a Critical-Review.J Adhes Sci Technol 1992;6:1269–302.
[2] Rodriguez-Valverde MA, Cabrerizo-Vilchez MA, Rosales-Lopez P, Paez-Duenas A, Hidalgo-Alvarez R. Contact angle measurements on two (woodand stone) non-ideal surfaces. Colloids Surf, A Physicochem Eng Asp2002;206:485–95.
[3] Tavana H, Neumann AW. Recent progress in the determination of solidsurface tensions from contact angles. Adv Colloid Interface Sci2007;132:1–32.
[4] Decker EL, Frank B, Suo Y, Garoff S. Physics of contact anglemeasurement. Colloids Surf, A Physicochem Eng Asp 1999;156:177–89.
[5] Marmur A. Soft contact: measurement and interpretation of contact angles.Soft Matter 2006;2:12–7.
[6] Schwartz LW, Garoff S. Contact-angle hysteresis and the shape of the 3-phase line. J Colloid Interface Sci 1985;106:422–37.
[7] Li D, Lin FYH, Neumann AW. Effect of corrugations of the 3-phase line onthe drop size dependence of contact angles. J Colloid Interface Sci1991;142:224–31.
[8] Decker EL, Garoff S. Contact line structure and dynamics on surfaces withcontact angle hysteresis. Langmuir 1997;13:6321–32.
[9] Marmur A. Thermodynamic aspects of contact-angle hysteresis. AdvColloid Interface Sci 1994;50:121–41.
[10] Decker EL, Garoff S. Contact angle hysteresis: the need for new theoreticaland experimental models. J Adhes 1997;63:159–85.
[11] Gouin H. The wetting problem of fluids on solid surfaces. Part 2: thecontact angle hysteresis. Contin Mech Thermodyn 2003;15:597–611.
[12] Yang XF. Equilibrium contact-angle and intrinsic wetting hysteresis. ApplPhys Lett 1995;67:2249–51.
[13] Marmur A. Equilibrium contact angles: theory and measurement. ColloidsSurf, A Physicochem Eng Asp 1996;116:55–61.
[14] Long J, Hyder MN, Huang RYM, Chen P. Thermodynamic modeling ofcontact angles on rough, heterogeneous surfaces. Adv Colloid Interface Sci2005;118:173–90.
[15] Krasovitski B, Marmur A. Drops down the hill: theoretical study oflimiting contact angles and the hysteresis range on a tilted plate. Langmuir2005;21:3881–5.
[16] Marmur A. Contact-angle hysteresis on heterogeneous smooth surfaces:theoretical comparison of the captive bubble and drop methods. ColloidsSurf, A Physicochem Eng Asp 1998;136:209–15.
[17] Lam CNC, Wu R, Li D, Hair ML, Neumann AW. Study of the advancingand receding contact angles: liquid sorption as a cause of contact anglehysteresis. Adv Colloid Interface Sci 2002;96:169–91.
[18] Hennig A, Eichhorn KJ, Staudinger U, Sahre K, Rogalli M, StammM, et al.Contact angle hysteresis: study by dynamic cycling contact anglemeasurements and variable angle spectroscopic ellipsometry on polyimide.Langmuir 2004;20:6685–91.
[19] Nadkarni GD, Garoff S. An investigation of microscopic aspects ofcontact-angle hysteresis — pinning of the contact line on a single defect.Europhys Lett 1992;20:523–8.
[20] Drelich J. Static contact angles for liquids at heterogeneous rigid solidsurfaces. Pol J Chem 1997;71:525–49.
[21] Rangwalla H, Schwab AD, Yurdumakan B, Yablon DG, Yeganeh MS,Dhinojwala A. Molecular structure of an alkyl-side-chain polymer-waterinterface: origins of contact angle hysteresis. Langmuir 2004;20:8625–33.

100 M.A. Rodríguez-Valverde et al. / Advances in Colloid and Interface Science 138 (2008) 84–100
[22] Gregg SJ. Hysteresis of the contact angle. J Chem Phys 1948;16:549–50.[23] Good RJ. A thermodynamic derivation of wenzel's modification of
young's equation for contact angles— together with a theory of hysteresis.J Am Chem Soc 1952;74:5041–2.
[24] Johnson RE, Dettre RH. Contact angle hysteresis .3. Study of an idealizedheterogeneous surface. J Phys Chem 1964;68:1744–50.
[25] Joanny JF, De Gennes PG. A model for contact-angle hysteresis. J ChemPhys 1984;81:552–62.
[26] Schwartz LW, Garoff S. Contact-angle hysteresis on heterogeneoussurfaces. Langmuir 1985;1:219–30.
[27] Ramos SMM, Charlaix E, Benyagoub A. Contact angle hysteresis onnano-structured surfaces. Surf Sci 2003;540:355–62.
[28] Ramos S, Tanguy A. Pinning-depinning of the contact line on nanoroughsurfaces. Eur Phys J E 2006;19:433–40.
[29] De Gennes PG. Wetting — statics and dynamics. Rev Mod Phys1985;57:827–63.
[30] Iliev SD, Pesheva NC.Wetting properties of well-structured heterogeneoussubstrates. Langmuir 2003;19:9923–31.
[31] Brandon S, Haimovich N, Yeger E, Marmur A. Partial wetting ofchemically patterned surfaces: the effect of drop size. J Colloid InterfaceSci 2003;263:237–43.
[32] Hoorfar M, Amirfazli A, Gaydos JA, Neumann AW. The effect of linetension on the shape of liquid menisci near stripwise heterogeneous walls.Adv Colloid Interface Sci 2005;114:103–18.
[33] Huh C, Mason SG. Effects of surface roughness on wetting (theoretical).J Colloid Interface Sci 1976;60:11–38.
[34] Neumann AW, Good RJ. Thermodynamics of contact angles .1. Hetero-geneous solid surfaces. J Colloid Interface Sci 1972;38:341–9.
[35] Li D, Neumann AW. Surface heterogeneity and contact-angle hysteresis.Colloid Polym Sci 1992;270:498–504.
[36] Marmur A. Contact-angle hysteresis on heterogeneous smooth surfaces.J Colloid Interface Sci 1994;168:40–6.
[37] Iwamatsu M. Contact angle hysteresis of cylindrical drops on chemicallyheterogeneous striped surfaces. J Colloid Interface Sci 2006;297:772–7.
[38] Shuttleworth R, Bailey GLJ. The spreading of a liquid over a rough solid.Discuss Faraday Soc 1948;3:16–22.
[39] Erbil HY,McHale G, Rowan SM, NewtonMI. Determination of the recedingcontact angle of sessile drops on polymer surfaces by evaporation. Langmuir1999;15:7378–85.
[40] Kwok DY, Gietzelt T, Grundke K, Jacobasch HJ, Neumann AW. Contactangle measurements and contact angle interpretation .1. Contact anglemeasurements by axisymmetric drop shape analysis and a goniometersessile drop technique. Langmuir 1997;13:2880–94.
[41] Krishnan A, Liu YH, Cha P, Woodward R, Allara D, Vogler EA. Anevaluation of methods for contact angle measurement. Colloids Surf, BBiointerfaces 2005;43:95–8.
[42] Tavana H, Neumann AW. On the question of rate-dependence of contactangles. Colloids Surf, A Physicochem Eng Asp 2006;282:256–62.
[43] Long J, Chen P. On the role of energy barriers in determining contact anglehysteresis. Adv Colloid Interface Sci 2006;127:55–66.
[44] Pasandideh-Fard M, Chen P, Mostaghimi J, Neumann AW. The general-ized Laplace equation of capillarity .1. Thermodynamic and hydrostaticconsiderations of the fundamental equation for interfaces. Adv ColloidInterface Sci 1996;63:151–77.
[45] Robbins MO, Joanny JF. Contact-angle hysteresis on random surfaces.Europhys Lett 1987;3:729–35.
[46] Woodward JT, Gwin H, Schwartz DK. Contact angles on surfaces withmesoscopic chemical heterogeneity. Langmuir 2000;16:2957–61.
[47] Cubaud T, Fermigier A. Advancing contact lines on chemically patternedsurfaces. J Colloid Interface Sci 2004;269:171–7.
[48] FangCP, Drelich J. Theoretical contact angles on a nano-heterogeneous surfacecomposed of parallel apolar and polar strips. Langmuir 2004;20:6679–84.
[49] Li W, Amirfazli A. A thermodynamic approach for determining the contactangle hysteresis for superhydrophobic surfaces. J Colloid Interface Sci2005;292:195–201.
[50] Kusumaatmaja H, Yeomans JM. Modeling contact angle hysteresis onchemically patterned and superhydrophobic surfaces. Langmuir 2007;23:6019–32.
[51] Garandet JP, Drevet B, Eustathopoulos N. On the validity of Young'sequation in the presence of gravitational and other external force fields. ScrMater 1998;38:1391–7.
[52] Roura P, Fort J. Local thermodynamic derivation of Young's equation.J Colloid Interface Sci 2004;272:420–9.
[53] Gaydos J, Neumann AW. Generalized theory of capillarity for axisymme-trical menisci. Adv Colloid Interface Sci 1992;38:143–227.
[54] Wier KA, Gao LC, McCarthy TJ. Two-dimensional fluidics based ondifferential lyophobicity and gravity. Langmuir 2006;22:4914–6.
[55] De Gennes PG. Brownian motion with dry friction. J Stat Phys2005;119:953–62.
[56] Schwartz LW. Hysteretic effects in droplet motions on heterogeneoussubstrates: direct numerical simulation. Langmuir 1998;14:3440–53.
[57] Tavana H, Yang GC, Yip CM, Appelhans D, Zschoche S, Grundke K, et al.Stick-slip of the three-phase line in measurements of dynamic contactangles. Langmuir 2006;22:628–36.
[58] Schaffer E, Wong PZ. Contact line dynamics near the pinning threshold: acapillary rise and fall experiment. Phys Rev E 2000;61:5257–77.
[59] Langbein D. Canthotaxis/wetting barriers/pinning lines, capillary surfaces:shape–stability–dynamics. Particular Under Weightlessness. Berlin:Springer; 2002. p. 149–77.
[60] Decker EL, Garoff S. Using vibrational noise to probe energy barriersproducing contact angle hysteresis. Langmuir 1996;12:2100–10.
[61] Lloyd TB, Connelly GM. Direct measurement of energy barriers on roughand heterogeneous solid surfaces. J Adhes 1997;63:141–57.
[62] Amirfazli A, Neumann AW. Status of the three-phase line tension. AdvColloid Interface Sci 2004;110:121–41.
[63] Della Volpe C, Maniglio D, Siboni S, Morra M. An experimentalprocedure to obtain the equilibrium contact angle from the Wilhelmymethod. Oil & Gas Science and Technology-Revue De L Institut FrancaisDu Petrole, vol. 56; 2001. p. 9–22.
[64] Lander LM, Siewierski LM, Brittain WJ, Vogler EA. A systematiccomparison of contact-angle methods. Langmuir 1993;9:2237–9.
[65] Drelich J, Miller JD, Good RJ. The effect of drop (bubble) size onadvancing and receding contact angles for heterogeneous and rough solidsurfaces as observed with sessile-drop and captive-bubble techniques.J Colloid Interface Sci 1996;179:37–50.
[66] Kwok DY, Neumann AW. Contact angle measurement and contact angleinterpretation. Adv Colloid Interface Sci 1999;81:167–249.
[67] Andrieu C, Sykes C, Brochard F. Average Spreading Parameter onHeterogeneous Surfaces. Langmuir 1994;10:2077–80.
[68] Kamusewitz H, Possart W, Paul D. The relation between Young'sequilibrium contact angle and the hysteresis on rough paraffin waxsurfaces. Colloids Surf, A Physicochem Eng Asp 1999;156:271–9.
[69] Kamusewitz H, Possart W. Wetting and scanning force microscopy onrough polymer surfaces: Wenzel's roughness factor and the thermody-namic contact angle. Appl Phys, A Mater Sci Process 2003;76:899–902.
[70] Della Volpe C, Maniglio D, Morra M, Siboni S. The determination of a‘stable-equilibrium’ contact angle on heterogeneous and rough surfaces.Colloids Surf, A Physicochem Eng Asp 2002;206:47–67.
[71] Meiron TS, Marmur A, Saguy IS. Contact angle measurement on roughsurfaces. J Colloid Interface Sci 2004;274:637–44.
[72] Cassie ABD. Contact angles. Discuss Faraday Soc 1948;3:11–6.[73] Iwamatsu M. The validity of Cassie's law: a simple exercise using a
simplified model. J Colloid Interface Sci 2006;294:176–81.[74] Gao LC, McCarthy TJ. How Wenzel and Cassie were wrong. Langmuir
2007;23:3762–5.[75] Wolfram S. The Mathematica Book. Fifth ed. Wolfram Media, Inc.; 2003.[76] Mahale AD, Wesson SP. A computer-model for wetting hysteresis.1. Avirtual
wetting balance. Colloids Surf, A Physicochem Eng Asp 1994;89:117–31.[77] Extrand CW. Contact angles and hysteresis on surfaces with chemically
heterogeneous islands. Langmuir 2003;19:3793–6.[78] Lin FYH, Dongqing L. The effect of surface heterogeneity on the drop size
dependence of contact angles. Chem Eng Sci 1995;50:2633–9.[79] Gea-Jódar P, Rodríguez-Valverde MA, Cabrerizo-Vílchez MA. Wetting on
chemically heterogeneous surfaces: pseudo-spherical approximation forsessile drops. In: Mittal KL, editor. Contact angle, Wettability andAdhesion. Leiden, The Netherlands: VSP; 2006. p. 183–202.





























