Embed Size (px)
Citation preview
UNIVERSITY OF CALGARY
Robust Visual Servoing of a Robot Arm Using
Artificial Immune System and Adaptive Control
by
Alejandro Carrasco Elizalde
A THESIS
SUBMITTED TO THE FACULTY OF GRADUATE STUDIES
IN PARTIAL FULFILMENT OF THE REQUIREMENTS FOR THE
DEGREE OF DOCTOR OF PHILOSOPHY
DEPARTMENT OF MECHANICAL AND MANUFACTURING ENGINEERING
CALGARY, ALBERTA
JANUARY, 2012
© Alejandro Carrasco Elizalde 2012
Library and Archives Canada
Published Heritage Branch
Bibliothdque et Archives Canada
Direction du Patrimoine de l'6dition
395 Wellington Street Ottawa ON K1A 0N4 Canada
395, rue Wellington Ottawa ON K1A 0N4 Canada
Your file Votre r6f6rence
ISBN: 978-0-494-83444-2
Our file Notre r6f6rence
ISBN: 978-0494-83444-2
NOTICE:
The author has granted a nonexclusive license allowing Library and Archives Canada to reproduce, publish, archive, preserve, conserve, communicate to the public by telecommunication or on the Internet, loan, distrbute and sell theses worldwide, for commercial or noncommercial purposes, in microform, paper, electronic and/or any other formats.
AVIS:
L'auteur a accords une licence non exclusive permettant £ la Bibliothdque et Archives Canada de reproduire, publier, archiver, sauvegarder, conserver, transmettre au public par telecommunication ou par (Internet, prSter, distribuer et vendre des thdses partout dans le monde, d des fins commerciales ou autres, sur support microforme, papier, 6lectronique et/ou autres formats.
The author retains copyright ownership and moral rights in this thesis. Neither the thesis nor substantial extracts from it may be printed or otherwise reproduced without the author's permission.
L'auteur conserve la propri£t6 du droit d'auteur et des droits moraux qui protege cette th6se. Ni la th&se ni des extraits substantiels de celle-ci ne doivent 6tre imprimis ou autrement reproduits sans son autorisation.
In compliance with the Canadian Privacy Act some supporting forms may have been removed from this thesis.
While these forms may be included in the document page count, their removal does not represent any loss of content from the thesis.
Conform6ment £ la loi canadienne sur la protection de la vie priv6e, quelques formulaires secondares ont 6t6 enlev6s de cette thdse.
Bien que ces formulaires aient inclus dans la pagination, il n'y aura aucun contenu manquant.
Canada
Abstract
Vision systems greatly enhance the capabilities of robots and allow them to be applied
to complex tasks within dynamic environments. In this thesis, we explore the problem of
controlling a robotic arm using image-based servoing in a monocular eye-in-hand config
uration. Specifically, we develop a visual servoing system capable of tracking non-planar
objects in the presence of uncertainties in both the robotic arm and the visual system.
To track selected features of a target object, we propose a feature extraction algorithm
that behaves as an immune systems. We evaluate the performance of our artificial im
mune system for three object representations: template, histogram and contour, and we
show that the AIS can track multiple features under affine transformations and nonlinear
distortions.
We then develop an image-based visual servoing control that is robust to parametric
uncertainties in the robot model and camera calibrations. We use the LaSalle's invariance
principle to prove the stability of the system and that the tracking error approaches zero
if the uncertainty is bounded. Simulations verify the robustness of the system.
To implement the visual servoing system on an experimental robot, we design an
open-architecture controller to replace the industrial controller of a PUMA robot. We
then compare the performance and robustness of the proposed control versus that of a
proportional control and a quasi-newton adaptive control under a variety of test con
ditions. We conclude that the proposed control has the best performance of the three
controls tested.
ii
Acknowledgements
The development of this thesis has been like a long walkthrough in the vastness of the
desert. In this time I had have good times and really personal bad times, but luckily
in the way I encountered people who have shared their wisdom and support with me
making this journey more bearable and reach fruition. To all of them I thank you for
your support, encouragement and hospitality.
I'll start by thanking my thesis supervisor, Peter Goldsmith. His enthusiasm, sup
port and insatiable patience of this work has been greatly appreciated. I would like to
acknowledge the generous funding of this work provided by the CONACyT program, the
Mexican Scholarships program. This work would not have been possible without their
support.
I'd like to thank my Mom for believing in me and trying to understand why I left
my country to pursue this thesis, and my Dad for teaching me that with hard work and
perseverance I can achieve my goals no matter how hard they can be. I'd like to thank
the whole family for providing a great deal of support, and for their enthusiasm at the
prospect of me to finish. Finally, I'm incredibly grateful to my wife Melissa for made my
days brighter in my bad days, for her love, understanding and encourage necessary to
finish this thesis.
iii
iv
Table of Contents
Abstract ii Acknowledgements iii Table of Contents iv List of Tables ' vii List of Figures viii List of Symbols and Abbreviations xi 1 Introduction 1 1.1 Motivation 1 1.2 Problem Description 3
1.2.1 Physical Setup 4 1.2.2 Subgoals 5
1.3 Contributions 5 1.4 Outline of Thesis 6 2 Visual Servoing Introduction 8 2.1 Concepts and Definitions of Visual Servoing 8
2.1.1 Definitions 9 2.2 Classification of Visual Servoing Systems 11 2.3 Proposed Approach of Visual Control 18 3 Vision System and Feature Extraction 19 3.1 Introduction Vision System 19 3.2 Camera Model 22
3.2.1 Pinhole Camera 22 3.2.2 Perspective Projection Model and Camera Parameters 23 3.2.3 Camera Calibration 25
3.3 Feature Extraction 26 3.3.1 Object Modeling 27
3.3.1.1 Parametric Representations 28 3.3.1.2 Non-parametric Representations 29
3.3.2 Object Identification 31 3.3.2.1 Supervised Learning 32 3.3.2.2 Distribution Representation 34
3.3.3 Object Tracking 37 3.3.3.1 Deterministic Tracking 38 3.3.3.2 Probabilistic Tracking 39
3.3.4 Occlusion Handling 41 3.4 Artificial Immune System Tracking (Proposed approach) 42
3.4.1 Artificial Immune system: Clonal Selection And Somatic Mutation 42 3.4.2 Experiments 48
3.4.2.1 Comparison Between Template and Histogram as B-cells 48 3.4.2.2 Tracking a Planar Object Under Affine and Nonlinear
Transformations 51
V
3.4.2.3 Tracking a 3D Object Under Distortions 53 3.4.2.4 Tracking an Object Using a Contour Representation . . 54
3.5 Summary 55 4 Control Synthesis 56 4.1 Introduction 56 4.2 Dynamics of Mechanical Systems 57 4.3 Definition of image Jacobian matrix 58 4.4 Control Law Formulation 61 4.5 Stability Analysis 64 4.6 Simulation Results 67 4.7 Summary and Conclusions 71 5 Experimental Performance Analysis on a Puma Robot 72 5.1 Introduction 72 5.2 Experimental Visual Servo Testbed 73 5.3 Camera Calibration 75 5.4 Open Loop Test 76 5.5 Controls Tested 77
5.5.1 Proportional Control 77 5.5.2 Quasi Newton Adaptive Control 78 5.5.3 Robust Adaptive Control (Proposed) 78
5.6 Tracking a Planar Object 79 5.6.1 Planar Object in 3D Translation 80 5.6.2 Planar Target Object in Translation and Rotation 87
5.7 Tracking of a Non Planar Object 95 5.8 Robustness Testing 100
5.8.1 Effect of Jacobian Error 100 5.8.2 Effect of Initial Depth Error 102 5.8.3 Effect of Initial Rotation Error 103 5.8.4 Effect of target position 105
5.9 Tracking a Moving Target Object 107 5.9.1 Rectangle Trajectory 107 5.9.2 Elliptical Trajectory Ill
6 Conclusion 114 6.1 Summary and Conclusions 114 6.2 Limitations and Future Work 116 Bibliography 118 A Definitions 131 B Robot controller 133 C Software Functions 137 C.l Robotic Interface Functions 137 C.2 Image Processing Functions 137 C.3 Matrix Functions 139 C.4 Main Object Classes 140
C.4.1 Class Puma Interface 140
C.4.2 Class Matrix Code 141 C.4.3 Class Feature Code 148
D Integral Image 151
vi
List of Tables
3.1 Result of the AIS tracker using Template and Histogram color as the representation of the 2D object 49
4.1 Initial and Desired pose of target in world coordinates and in image coordinates 68
5.1 Intrinsic parameters after camera calibration 76 5.2 Summary of performance for the tested controls under parameters uncer
tainties. ( 4- Pass, - Fail, * position-dependent) 100 5.3 Testing the law controls for different positions on workspace of the robotic
arm 106
vii

viii
List of Figures
1.1 Real application for visual servoing control: Industrial meat production . 2 1.2 General block diagram for a visual servoing 3 1.3 Main elements involved in visual servoing 4
2.1 Visual servoing control 8 2.2 Structure of position-based visual servoing 12 2.3 Structure of image-based visual servoing 14 2.4 Structure of hybrid visual servoing 16 2.5 Structure of proposed control system 18
3.1 Feature Tracking 19 3.2 Components of Visual System: Object, Optical Sensor, Image Adquisition,
Computer and Software 20 3.3 Pinhole Camera 22 3.4 Perspective Projection model 23 3.5 Key steps on Object Tracking 28 3.6 Example of parametric modelling: a) rectangle b) ellipse 29 3.7 Example of non-parametric modelling: a) Template b) Contour c) Blob . 30 3.8 Maximization of the distance between two hyperplanes 33 3.9 Histograms for images with a)synthetic colors and b) grey-scale. Each bar
of the histogram represents the proportion of the feature space falling into the bin width 35
3.10 Representation of probabilistic tracking model. The hidden State in orange is not accessible and the observation in blue is accessible 40
3.11 Immune System: Cloning and Mutation 43 3.12 Representation of a B-Cell: template case (a,b,c) and histogram case (d,e,f) 44 3.13 Antigen whitin the ROI 44 3.14 Somatic mutation of the cells for histogram representation 47 3.15 2D Objects as data driven object tracking: a) Synthetic B) Real .... 48 3.16 Template versus Histogram tracking: blue line is the real path to track,
green line the actual tracking 49 3.17 Snapshots from the experiment using a template representation of the
object: Blue square is the initial condition, Red square is the result of the AIS tracker 50
3.18 Tracking a template under affine transformations: scale, rotation and perspective distortions. Blue:initial position, Red:tracker 52
3.19 Tracking feature under deformations. Blue:initial position, Red:tracker . 53 3.20 Contour traking under severe clutter and partial occlusion 54
4.1 Controller 56 4.2 Initial and desired pose of target in pixel coordinates 68 4.3 Joint angles 69
ix
4.4 End-effector trajectory in world coordinates 70 4.5 Convergence to the desired pose in image coordinates 70
5.1 Real Time Visual Servoing 72 5.2 Physical setup of robot and target 73 5.3 Checkerboard target for camera calibration 75 5.4 Open loop test 77 5.5 Effect of different p on the average pixel error 79 5.6 Desired feature positions 80 5.7 Initial feature positions 81 5.8 Initial and desired positions of features 82 5.9 Joint error angles using proportional control 83 5.10 Joint error angles using adaptive control 83 5.11 Joint error angles using robust adaptive control 84 5.12 Trajectory on Axis X 85 5.13 Trajectory on Axis Y 85 5.14 Trajectory on Axis Z 86 5.15 Average error of the features in pixels 87 5.16 Desired position of the features 88 5.17 Initial position of the features 88 5.18 Error joint angles using proportional control in translation and rotation . 89 5.19 Error joint angles using quasi-Newton adaptive control in translation and
rotation 90 5.20 Error joint angles using robust adaptive control in translation and rotation 90 5.21 Features position before and after the task 91 5.22 Axis X trajectory for each control 92 5.23 Axis Y trajectory for each control 92 5.24 Axis Z trajectory for each control 93 5.25 Average error of the features in pixels 94 5.26 Collection of objects as target 96 5.27 Desired position of the features, yellow dots mark the features 96 5.28 Initial position of the features, red dots mark the initial features 97 5.29 Error joint angles using robust adaptive control for a 3D object 98 5.30 Initial position of the features for a 3D object 98 5.31 Final position of the features for a 3D object 99 5.32 XYZ Trajectory of camera using robust adaptive for 3D object 99 5.33 The average joint error vs different Z\ on the image Jacobian 101 5.34 Time-averaged feature error versus initial depth error 102 5.35 Effect of varying depth Zi versus the settling time 103 5.36 Time-averaged feature error versus initial rotation error 104 5.37 Settling time versus initial rotation error 105 5.38 Visual servoing control throughout the robot work space 107 5.39 Tracking an object over a rectangle trajectory 109 5.40 Y axis versus time 109

5.41 X axis versus time 110 5.42 Z axis versus time 110 5.43 Tracking an object over a ellipse trajectory 112 5.44 Z axis versus time 112 5.45 X axis versus time 113 5.46 Y axis versus time 113
B.l Electric Diagram for microcontroller 133 B.2 Electric Diagram for communication bus among microcontroller 134 B.3 Configuration of micro-controller interruptions 135 B.4 Main cycle for micro-controller 136
D.l Integral Image blocks 152 D.2 Integral Image: A particular example 152
x
xi
List of Symbols and Abbreviations
Chapter 2
P Point in three-dimensional space. R Rotation Matrix in three-dimensional space. t Vector representing a translation. r Pose of an object (positions and translations). T Task space. SE3 Special Euclidean group (3 dimensional space) n3 Real numbers (3 dimensional space). so3 Orthogonal group (3x3 Matrix). Vi Translational velocities. Wi Rotational velocities. s Error signal (image space). PBVS Position-based visual servoing. IBVS Image-based visual servoing. HVS Hibrid visual servoing. J img Image Jacobian.
Chapter 3
n Image plane. 0 Camera frame. f Focal length. X , Y , Z World coordinates of a point in space. kXy Skew coefficient. CCD Charge-coupled device. CMOS Complementary metal-oxide-semiconductor. a Scale factor. u , v Image coordinates.
Parameters for camera transformation from world coordenates to image rriij space. «(0 Spline function. K) B-Spline function. ANN Artificial neural networks. ft) Cost function. <!(•) Penalization function. R ( - ) Risk function. P ( - ) Bhattacharyya measure. H ( - ) Hellinger distance measure. NCC Normalized cross-correlation.
xii
SSD Sum of square difference. SNR Signal to noise ratio. AIS Artificial immune system. /(•) Affinity function. Xk Memory cells. Wk Weight memory cells.
Chapter 4
L Lagrangian. . T Torque vector. Q Joint displacement vector. H ( - ) Inertia matrix. CM Coriolis matrix. c(.) Gravitational force vector. no Regression matrix. e Robot parameter vector. Jim Image Jacobian. Ds Diagonal matrix of sigma-modification. K Nonimal value of robot parameter.
P Upper bound of the Jacobian uncertainty. Qu Unit vector of joint displacement. A , K p , K d Matrices of gains. V ( . ) Lyapunov function.
11-11 Vector Norm.
1
Chapter 1
Introduction
1.1 Motivation
Robots increase the production in manufacturing industry and also they increase the
accuracy and efficiency of many tasks, such as welding, painting, and machining. This
automatization has to be implemented in a customized manner, depending on the type of
task to be performed. Several robotic solutions have been developed to address this chal
lenge. However, these robots are mainly restricted to applications in static environments,
due to limitations in their autonomy.
One cause of this limitation is the lack of sensory inputs, such as visual and tactile
sensors. Although extra sensors introduce more complexity to a robotic system, they
are required either to improve its performance or to enhance its abilities. The use of
an image sensor for feedback is motivated by the execution of tasks in unstructured or
unknown environments, where exact motions cannot be preprogrammed.
Current industrial robot vision systems use relatively simple image processing tech
niques that rely on high-contrast images or structural lighting. While much research
has been done on image processing and feature extraction [2] [115] [11], there has been
relatively little application of such advanced vision systems to robot control.
A key motivation of our research on robotic vision systems is to automate cleaning
of carcasses in abattoirs. The meat production industry is seeking to improve processing
rate and safety and to reduce cost. Visual servoing is important in this application due to
the variation in shape and size of cow carcasses. Also, the carcass is continually moving
along a rail.
2
To help automate this cleaning operation, the author was previously involved in the
design of the hydraulic robot shown in Figure 1.1. The robot positions a vacuum cleaner
near the carcass to remove E.Coli bacteria. However, there was no vision system to
automatically detect the bacteria and to control the robot during the cleaning operation.
A robot equipped with a vision system could also be applied to horn and hoof removal
and to skinning.
Figure 1.1: Real application for visual servoing control: Industrial meat production
Early approaches to visual robot control in the literature implement the ; look-and-
move' paradigm [100] [19], in which the vision and control portions of the system are
separate. A static image is captured and processed, and then the manipulator is moved.
This approach has also been used in recent work [97],
More recent approaches use real-time visual feedback for continuous tracking con
trol [101] [68] [43]. Unfortunately, these are susceptible to inaccuracies in the image-
3
space/task-space due to uncertain camera calibration, for example. In addition, stability
analyses of such systems are based only on the visual part.
The goal of this thesis is to develop an adaptive visual tracking system that is robust
to uncertainties in the robot model and the camera calibration. To achieve this goal, we
develop novel algorithms for feature tracking and for robot control and integrate them
on an open-architecture platform.
1.2 Problem Description
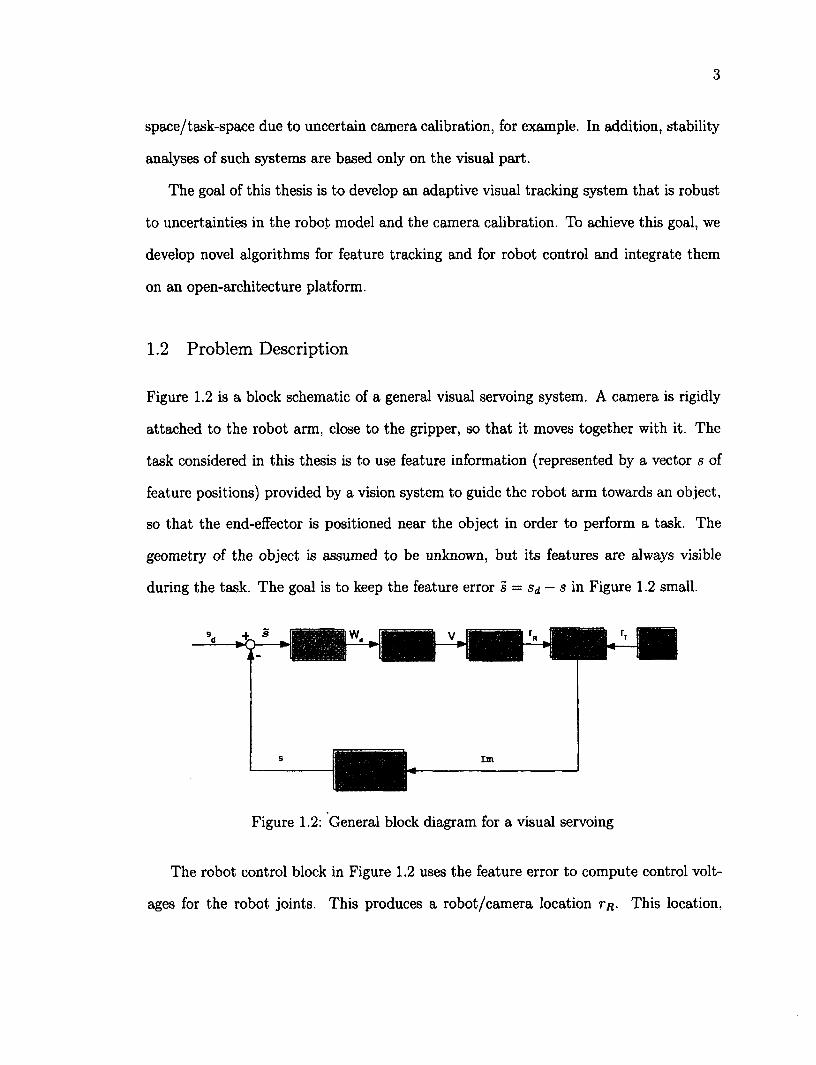
Figure 1.2 is a block schematic of a general visual servoing system. A camera is rigidly
attached to the robot arm, close to the gripper, so that it moves together with it. The
task considered in this thesis is to use feature information (represented by a vector s of
feature positions) provided by a vision system to guide the robot arm towards an object,
so that the end-effector is positioned near the object in order to perform a task. The
geometry of the object is assumed to be unknown, but its features are always visible
during the task. The goal is to keep the feature error s = s,i — s in Figure 1.2 small.
Figure 1.2: General block diagram for a visual servoing
The robot control block in Figure 1.2 uses the feature error to compute control volt
ages for the robot joints. This produces a robot/camera location tr. This location.
4
relative to the target object location rj, results in a camera image Im. A feature extrac
tion module then computes the feature vector s to be regulated.
1.2.1 Physical Setup
The main physical elements involved in the problem are shown in Figure 1.3 and are
described here:
Figure 1.3: Main elements involved in visual servoing
1. Target Object. The object to be tracked can be any shape, but is assumed to be
rigid. Two target objects are shown in Figure 1.3: a planar object with markers,
and a 3D object with general features.
2. Robot arm. The robot is a 6 degree of freedom (DOF) Puma 700 robot.
3. Vision system. A single grey-scale CCD video camera is fixed to the end effector.
5
1.2.2 Subgoals
The objective of this thesis may be broken down into the following subgoals:
1. Design an algorithm for feature extraction, and select an image repre
sentation for the features. This algorithm and image representation must be
able to track the translation, rotation, and perspective transformations of the image
features that result from 3D motion of the target object.
2. Design a control law to guide a robot arm towards the desired position.
This control law must be robust to uncertainty in the visual information and in
the robotic system. The visual servoing control law must run in real time (versus
a look-and-move approach).
3. Develop an open-architecture controller and integrate the feature ex
traction module with the robot control module. This architecture must be
flexible so that that both modules can be easily modified or replaced, to enable
more complex capabilities and applications.
1.3 Contributions
The main contributions of this thesis are:
1. Development of a method for the tracking of selected features. This
method is based on immune systems. We evaluate the performance of our artificial
immune system (AIS) for three object representations: template, histogram and
contour. As shown by experiment, the AIS tracks multiple features under affine
transformations and nonlinear distortions.
6
2. Development of a robust visual servoing control. This control is image-
based and is robust to parametric uncertainties in the robot model and the camera
calibration.
3. Stability proof of the control law. This proof uses LaSalle's invariance princi
ple to show that the overall the proposed control is stable and the tracking error
approaches zero subject to a bound on the parametric uncertainty.
4. Development of an open-architecture controller. This electronic hardware
and microcontroller programs were designed and built by the author to replace
the industrial controller of the PUMA robot. The proposed vision and control
algorithms were developed and implemented on this platform, along with a graphic
user interface (GUI) to facilitate testing.
5. An Experimental comparison with two alternative controls. The perfor
mance and robustness of the proposed control is compared with that of a propor
tional control and a quasi-newton adaptive control under a variety of test conditions.
1.4 Outline of Thesis
The rest of this thesis is organized as follows:
• Chapter 2 provides background on the visual servoing problem and introduces
some definitions and notation. It also classifies the three general approaches to the
problem and the one taken in this thesis.
• Chapter 3 focuses on the design of the feature extraction module and introduces
the artificial immune system (AIS) used to track the features. Its performance is
evaluated experimentally for various object representations (template, histogram,
and contours).
7
• Chapter 4 describes the design of the proposed robust visual servoing control law.
This chapter also presents the stability proof for our control law and simulations
to assess the effect of uncertainty on system performance.
• Chapter 5 describes the implementation and testing of the proposed control on a
Puma robot. Experiments are conducted to compare its performance and robust
ness against that of a proportional control and a quasi-newton adaptive control.
• Chapter 6 summarizes the main conclusions from the thesis and briefly describes
some lines of future work.
8
Chapter 2
Visual Servoing Introduction
2.1 Concepts and Definitions of Visual Servoing
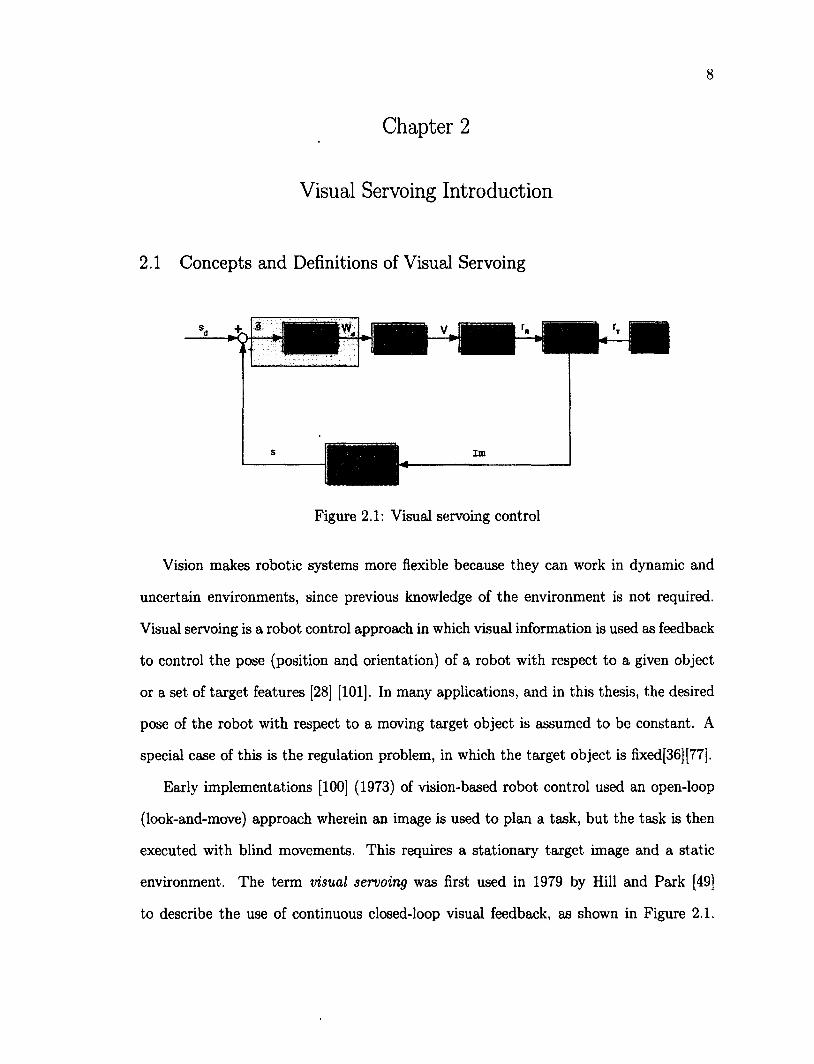
Figure 2.1: Visual servoing control
Vision makes robotic systems more flexible because they can work in dynamic and
uncertain environments, since previous knowledge of the environment is not required.
Visual servoing is a robot control approach in which visual information is used as feedback
to control the pose (position and orientation) of a robot with respect to a given object
or a set of target features [28] [101]. In many applications, and in this thesis, the desired
pose of the robot with respect to a moving target object is assumed to be constant. A
special case of this is the regulation problem, in which the target object is fixed[36] [77].
Early implementations [100] (1973) of vision-based robot control used an open-loop
(look-and-move) approach wherein an image is used to plan a task, but the task is then
executed with blind movements. This requires a stationary target image and a static
environment. The term visual servoing was first used in 1979 by Hill and Park [49]
to describe the use of continuous closed-loop visual feedback, as shown in Figure 2.1.
9
The visual servoing approach is used in this thesis. Introductions to visual servoing and
reviews on its evolution from its early years can be found in [27], [63], and [28]. This
chapter focuses on concepts, defininitions, and notation related to the visual control block
highlighted in Figure 2.1.
2.1.1 Definitions
Typically, robotic tasks are specified with respect to one or more coordinate frames. For
example, a camera may supply information about the location of an object with respect to
the camera frame, while the configuration used to grasp the object may be specified with
respect to a coordinate frame of the end-effector. Let the represention of the coordinates
of a point P with respect to frame a by the notation aP. Given the frames, a and b, the
rotation matrix that represents the orientation of frame b with respect to a is denoted by
aRb. The location of the origin of the frame b with respect to frame a is denoted by atb.
Together, the position and orientation of a frame are referred as pose, which we denote
by % = (aRb,atb).
If we are given bP and arb = (aRb,ati,), we can obtain the coordinates of aP by the
transformation
aP=a RbbP+atb. (2.1)
In visual servoing. relevant features are extracted from the image of a moving target
object, in order to track the object with a robot arm. In [101], an image feature is
defined as any structural feature that can be extracted from an image, such as an edge
or a corner. According to [7], an image feature corresponds to the projection in the
image plane of an scene feature, which can be defined as a set of 3D elements - such as
points, lines or vertices - rigidly attached to a single body. In our control approach, each
image feature is assigned a unique 2D position s4 in pixels. A set of n feature positions
s = [si,s2,-,Sn]t are used to control the robot.
10
The selection of image features depends on the task to be performed. It is best to
select features that can be quickly extracted to provide the control law with new input
data at an adequate frequency [20] [91]. The use of prediction methods to estimate
the location of the image features can help to improve the robustness and the speed of
the tracking [85] [113]. These methods can also be useful to handle the problem of the
occlusion of features. A review of feature tracking methods used in visual servoing works
can be found in [27].
The visual servoing control law uses the values of the image features to determine
the movements the robot should perform in its task space. The task space of the robot,
represented here by T = SE3 = 5R3 x SO3, is the set of poses (positions and orienta
tions) that the robot can achieve [101] and is a smooth m-manifold [67], where m is the
dimension of the task space.
We represent the components of a pose r € T as r = [tx,ty,tx,6x,0v, 9Z}1. where the U
indicate translations and the are the rotations, for i € {x,y, z}. In some applications,
the task space can be reduced to a subset of the above, that is, T C SE3. The dimension
of the task space determines the minimum number of degrees of freedom that the robot
needs to perform a task.
In this thesis, we compute the velocity r in task space to correct the error between its
current and desired pose in the task space T = SE3. This velocity can be expressed as
r = [V, H]f = [Vx, Vy, Vz, ojx,uiy, Ug]*, where values V* correspond to translational velocities
and values to rotational velocities, for i € {x,y,zj. This vector r is known as the
velocity screw of the robot.
In other works [36] [63], the design of the control law has followed the so called task
function formalism [37] [15]. According to this approach, it is possible to express any
servoing scheme according to the regulation to zero of a function called the task function,
or control error function. When the current pose of the robot matches the target or
11
desired one, the value returned by the task function should be zero.
2.2 Classification of Visual Servoing Systems
Classification of visual servo systems is typically based on two criteria:
• Organization of the control structure. This criterion is related to the level at
which the control law computes commands for the robot. Two types of systems
have been distinguished:
- Two-stage control. The control is performed in two stages. As shown in Figure
2.1, the Visual Control uses the image error e to produce a desired task space
location Wd or velocity, which is input to the Robot Control, which sends
motor voltages V to the robot joints. Most of the reported systems in the
literature follow this approach [101] [63].
- One-stage control. A single control directly computes the motor voltages V
from the image error e. This is the approach used in this thesis.
• Space of the error signal. This criterion considers the space in which the differ
ence or error between the current and the desired pose of the robot -and, therefore,
the task function- is computed. In all of the structures, the image features are
extracted from the image using a windowing techniques, reducing time processing,
and image feature parameters are measured. Three types of systems are distin
guished:
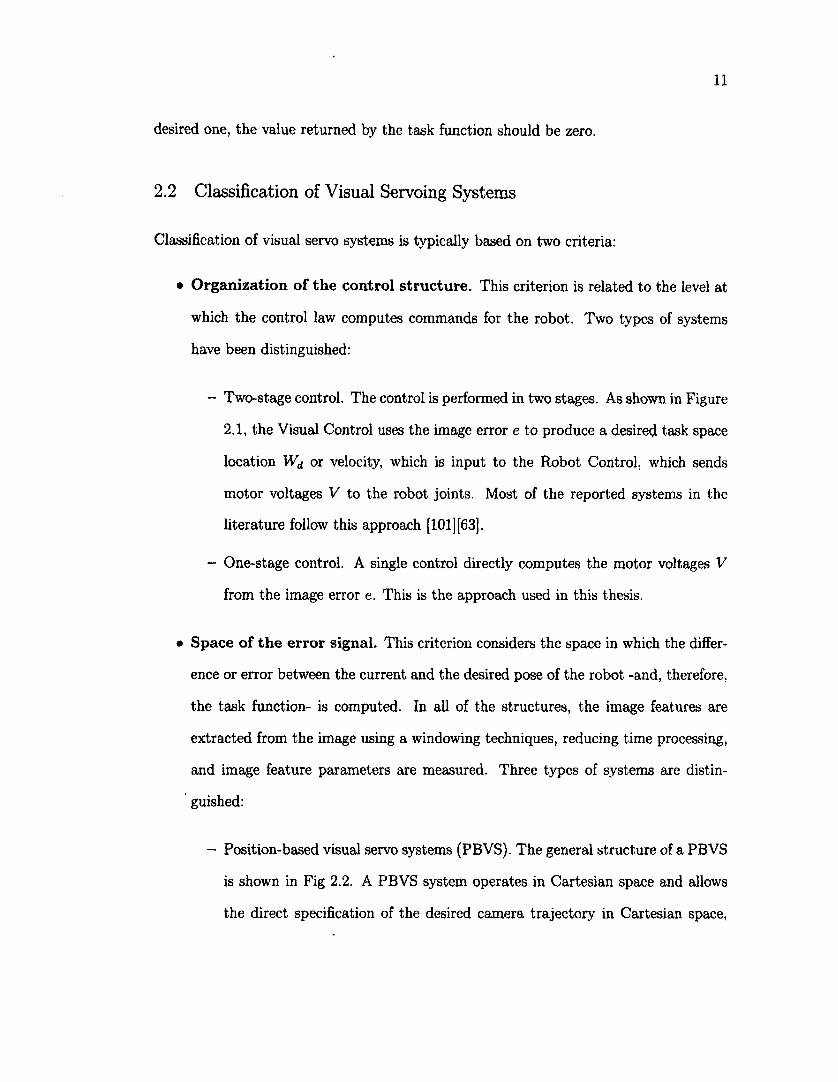
- Position-based visual servo systems (PBVS). The general structure of a PBVS
is shown in Fig 2.2. A PBVS system operates in Cartesian space and allows
the direct specification of the desired camera trajectory in Cartesian space,
12
often used for robotic task specification. Also, by separating the pose estima
tion problem from the control design problem, the control designer can take
advantage of well established robot Cartesian control algorithms.
Often, PBVS provides better response to large translational and rotational
camera displacements away from the desired location than does IBVS [15].
PBVS is free of the image singularities, local minima, and camera retreat
problems specific to IBVS [7], Under certain assumptions, the closed-loop
stability of PBVS is robust with respect to bounded errors of camera intrinsic
calibration. However, PBVS depends on a precise system calibration, includ
ing the calibration of the camera and the relationship between the camera and
the robot. In addition, estimating the pose of the target object requires the
use of a 3D model. Since this must be estimated on-line, this results in a slower
feedback sample, rate than for IBVS. Finally, PBVS provides no mechanism
for keeping features within the field of view.
Power amplifiers
Cartesian controller
Joint Servo Loops
Iraage feature extractton
Feature & window selection Windows & Features
Locations
Figure 2.2: Structure of position-based visual servoing
Pose estimation is a key issue in PBVS. The disadvantages of these techniques
are their complexity and dependency on the camera and object models. The
task is to find the relative pose of object relative to the end-point using 2D
13
image coordinates of feature points and knowledge about the camera intrinsic
parameters and the relationship between the observed feature points (usually
from the CAD model of the object). It has been shown that at least three
feature points are required to solve for the 6D pose vector [118]. However, to
obtain a unique solution, at least four features will be needed. The existing
solutions for pose estimation problem can be divided into analytic and least-
squares solutions.
To reduce the noise effect in pose estimation, some sort of smoothing or averag
ing is usually incorporated. Extended Kalman filtering (EKF) provides such
an excellent iterative solution to pose estimation. This approach has been
implemented for 6D control of the robot end effector successfully using the
observations of image coordinates of 4 or more features [114] [56]. To adapt
to the sudden motions of the object, an adaptive Kalman filter estimation
has also been formulated recently for 6D pose estimation [72], In comparison
to many techniques, Kalman filter-based solutions are less sensitive to small
measurements noise.
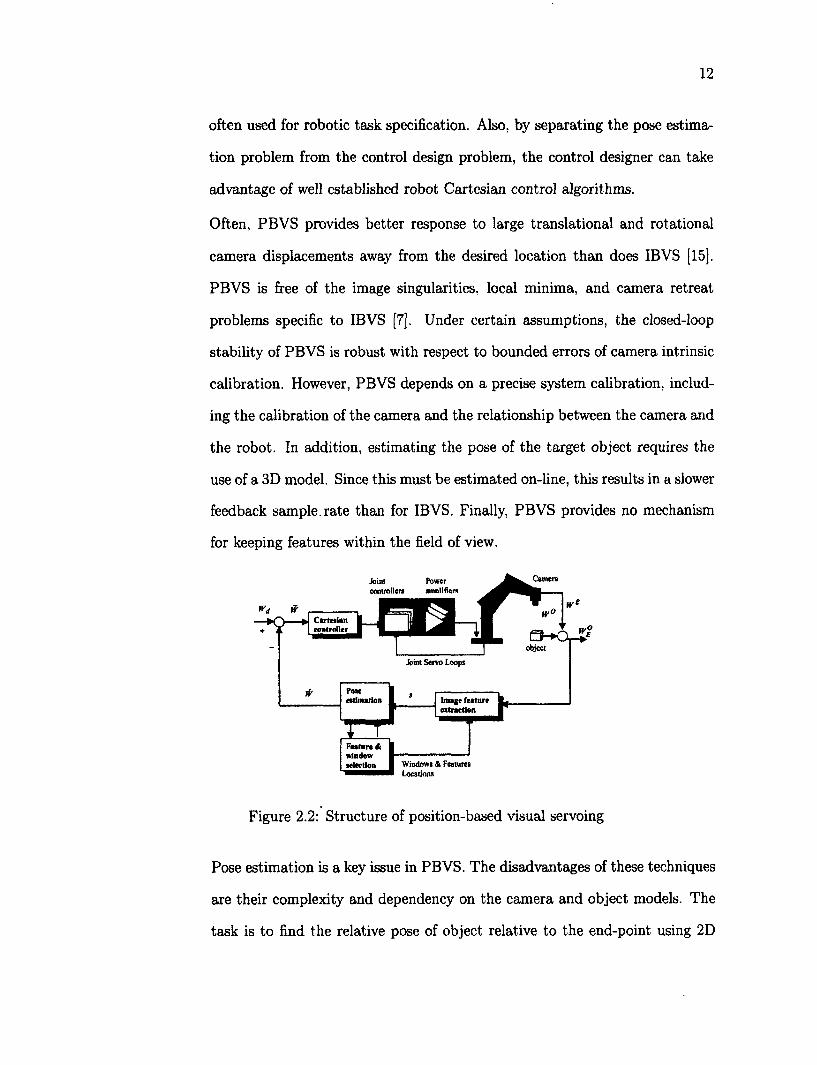
- Image-based visual servo systems (IBVS) is the approach used in this thesis. In
IBVS (shown in Figure 2.1), the error signal and control command is calculated
in the image space. The task of the control is to minimize the error of the
feature parameter vector, given by s = sj — s. The advantage of IBVS is
that it does not require full pose estimation and hence is computationally less
involved than PBVS. Also, it is claimed that the positioning accuracy of IBVS
is less sensitive to camera calibration errors than PBVS [101]. However. IBVS
can lead to image singularities that might cause control instabilities.
The system may use either a fixed camera or an eye-in-hand configuration.
In the case of a fixed camera, the robot moves in front of the camera until
14
Camera Joint Controllers
Power Amplifiers
*4 J Feature »Q » space
+ * k controller
Joint Servo Loops
Image feature extraction
* 1 Feature & window selection Windows & Features
Locations
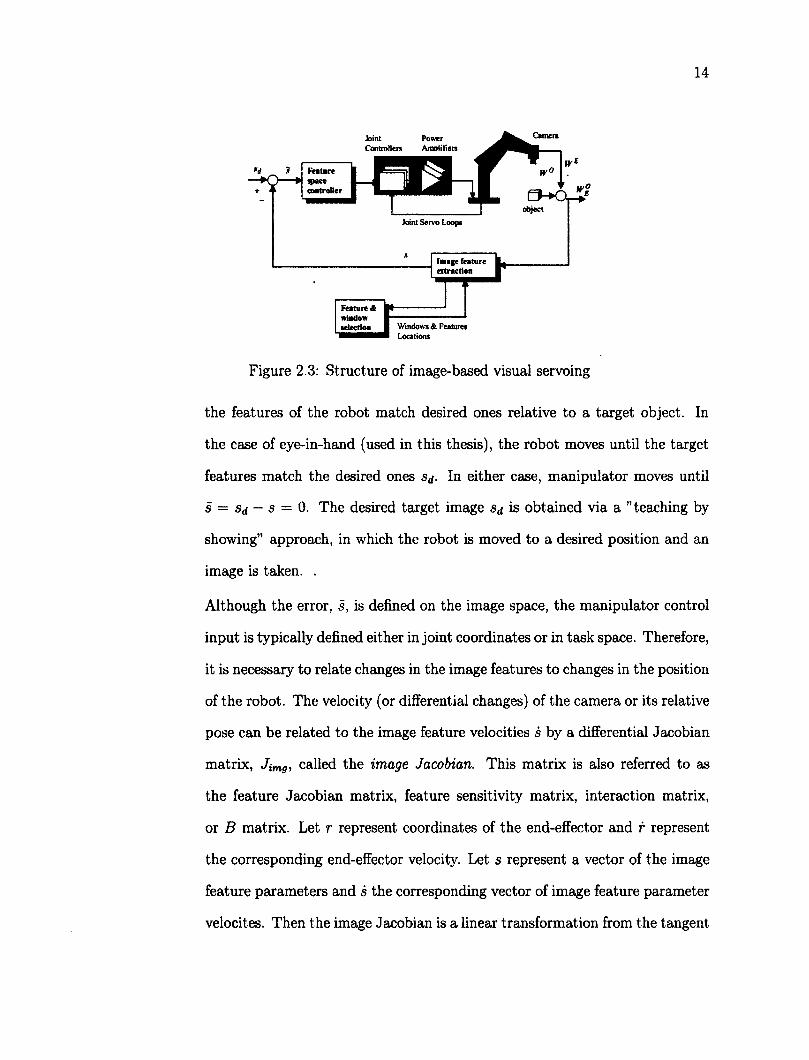
Figure 2.3: Structure of image-based visual servoing
the features of the robot match desired ones relative to a target object. In
the case of eye-in-hand (used in this thesis), the robot moves until the target
features match the desired ones s^. In either case, manipulator moves until
s = Sd — s = 0. The desired target image Sd is obtained via a "teaching by
showing" approach, in which the robot is moved to a desired position and an
image is taken. .
Although the error, s, is defined on the image space, the manipulator control
input is typically defined either in joint coordinates or in task space. Therefore,
it is necessary to relate changes in the image features to changes in the position
of the robot. The velocity (or differential changes) of the camera or its relative
pose can be related to the image feature velocities s by a differential Jacobian
matrix, Jjm9, called the image Jacobian. This matrix is also referred to as
the feature Jacobian matrix, feature sensitivity matrix, interaction matrix,
or B matrix. Let r represent coordinates of the end-effector and f represent
the corresponding end-effector velocity. Let s represent a vector of the image
feature parameters and s the corresponding vector of image feature parameter
velocites. Then the image Jacobian is a linear transformation from the tangent
15
space of T at r to the tangent space of 5 at s:
S = JimgT (2.2)
where JiTng 6 Mkxm.
In real visual servo systems, it is impossible to know perfectly in practice the
image Jacobian Jimg, so an approximation or an estimation must be realized.
One way to "adapt" the image Jacobian is to use information obtained while
performing the task, specifically the changes in visual feature values versus
the changes in motor joint angles.
- Hybrid methods. The advantages of both PBVS and IBVS have been com
bined in recent hybrid approaches to visual servoing, Fig 2.4. Hybrid methods
[75] [31] [43] control of some degrees of freedom, such as camera rotation, using
PBVS, and control others using IBVS. These methods generally rely on the
decomposition of the image Jacobian matrix. A homography matrix (a 3x3
matrix) represents feature positions and allows motions to be decomposed into
rotational and translational components. This matrix can be computed by a
set of corresponding points in the initial and desired images. This approach
provides several advantages. First, since camera rotation and translation con
trols are decoupled, the camera retreat problem [22] is resolved. Second, HVS
is free of image singularities and local minima.
One of the drawbacks of this method is that, for a non planar target, at least
eight points are necessary to estimate the homography matrix, while at least
four points are theoretically needed in the other schemes. Another drawback
is that this method is more sensitive to image noise than 2-D visual servoing,
since this scheme directly uses visual features as input to the control law,
16
Joint Power ^^fc^^Camera controllers arnntifiers
sal; I | object
Rotation controller
Joint Servo Loops
Pose estimation
Windows & Features Locations
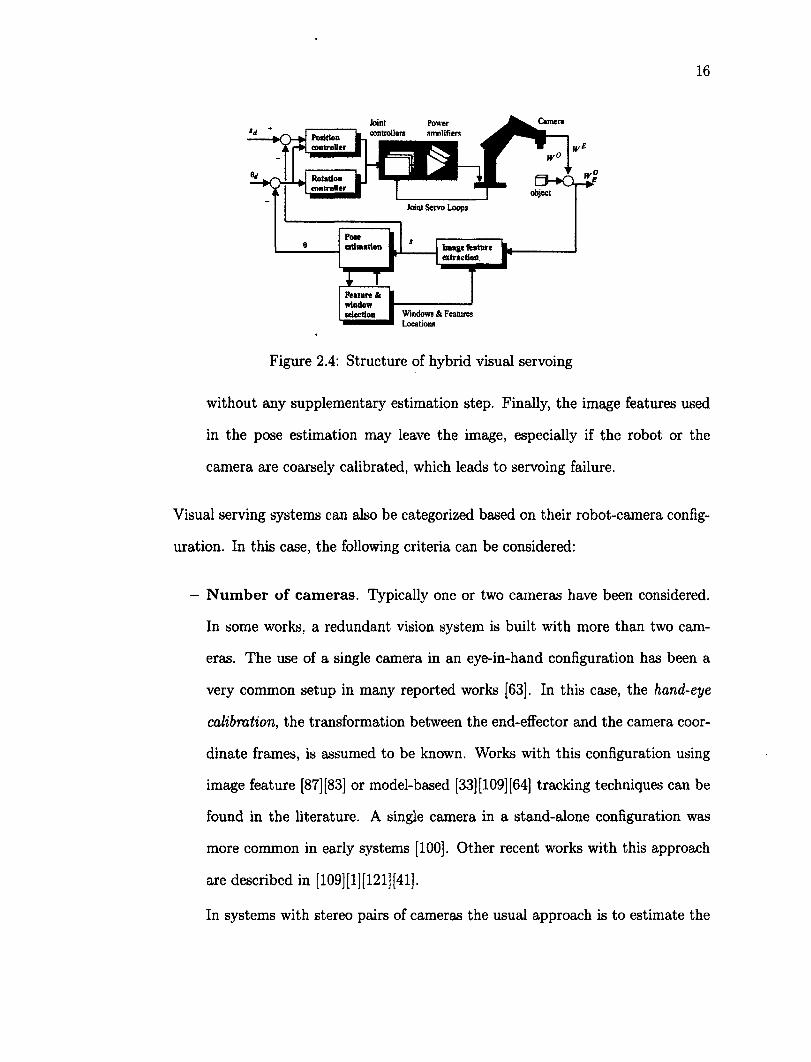
Figure 2.4: Structure of hybrid visual servoing
without any supplementary estimation step. Finally, the image features used
in the pose estimation may leave the image, especially if the robot or the
camera are coarsely calibrated, which leads to servoing failure.
Visual serving systems can also be categorized based on their robot-camera config
uration. In this case, the following criteria can be considered:
- Number of cameras. Typically one or two cameras have been considered.
In some works, a redundant vision system is built with more than two cam
eras. The use of a single camera in an eye-in-hand configuration has been a
very common setup in many reported works [63]. In this case, the hand-eye
calibration, the transformation between the end-effector and the camera coor
dinate frames, is assumed to be known. Works with this configuration using
image feature [87] [83] or model-based [33] [109] [64] tracking techniques can be
found in the literature. A single camera in a stand-alone configuration was
more common in early systems [100], Other recent works with this approach
are described in [109] [1] [121] [41].
In systems with stereo pairs of cameras the usual approach is to estimate the
17
disparity and the depth of the scene [62] [76]. However one of the problems
with respect to this computation is the detection of matching features between
two or more images. The use of a stereo head mounted on the end-effector is
less common than in a stand-alone configuration, since in the latter is easier
to make the baseline, the line joining both cameras, large enough to obtain an
accurate depth estimation [63]. Some systems using a stereo head in a eye-in-
hand configuration are described in [68] [32]. Some examples of two cameras
in a stand-alone configuration can be found in [47] [51] [52].
- Camera Location. The following options are available:
* Eye-in-hand. The camera, or cameras, is mounted on the end-effector of
the robot. With this configuration, it is possible to have a more detailed
view of the object of interest.
* Stand-alone. The camera, or cameras, is fixed on the workspace of the
robot. This configuration provides a wider field of view of the scene.
A final classification of visual servo system is given in [101]:
- Endpoint open-loop (EOL) systems. These are systems in which only
the target can be observed. Systems following this approach can be found in
[84].
- Endpoint closed-loop (ECL) systems. In these systems, both the target
and end-effector of the robot can be observed. Although control is more precise
for ECL systems, the need for an end-effector image, in addition to the target
image, increases the computational cost of feature extraction. Some ECL
systems have been reported in [117].
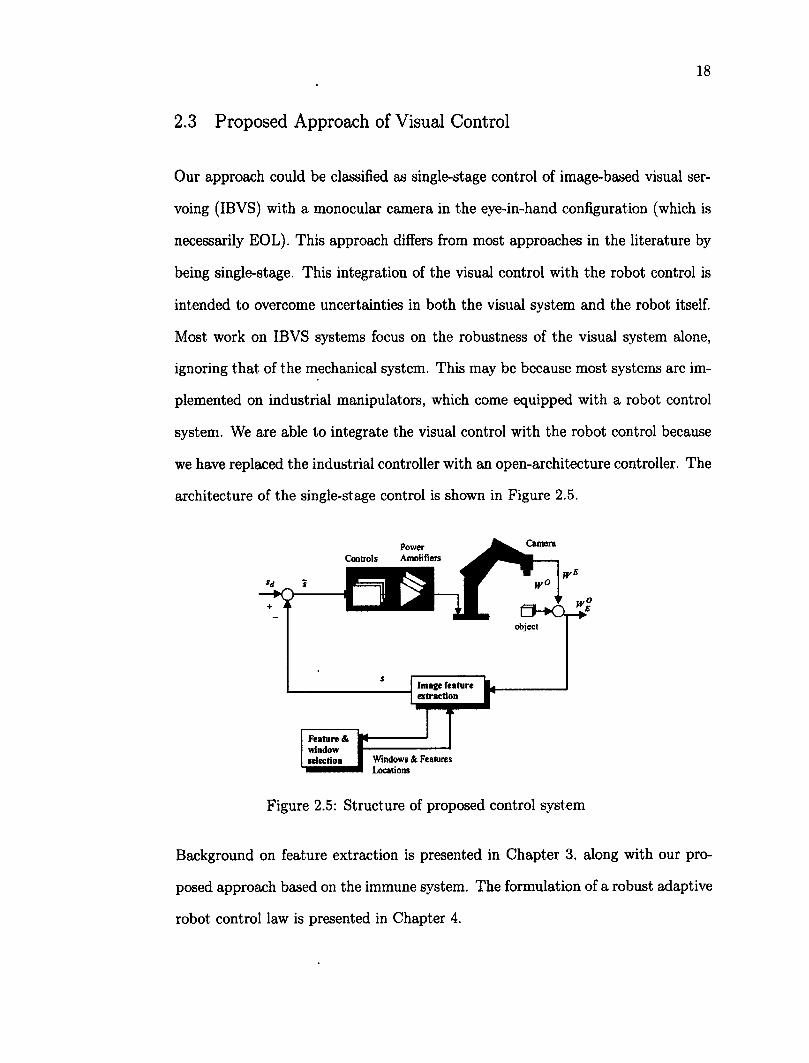
2.3 Proposed Approach of Visual Control
18
Our approach could be classified as single-stage control of image-based visual ser-
voing (IBVS) with a monocular camera in the eye-in-hand configuration (which is
necessarily EOL). This approach differs from most approaches in the literature by
being single-stage. This integration of the visual control with the robot control is
intended to overcome uncertainties in both the visual system and the robot itself.
Most work on IBVS systems focus on the robustness of the visual system alone,
ignoring that of the mechanical system. This may be because most systems are im
plemented on industrial manipulators, which come equipped with a robot control
system. We are able to integrate the visual control with the robot control because
we have replaced the industrial controller with an open-architecture controller. The
architecture of the single-stage control is shown in Figure 2.5.
Power ^^Cimen
Controls Amolifiers
S31 object
Image feature extraction
Feature & window •election Windows & Features
Locations
Figure 2.5: Structure of proposed control system
Background on feature extraction is presented in Chapter 3, along with our pro
posed approach based on the immune system. The formulation of a robust adaptive
robot control law is presented in Chapter 4.
19
Chapter 3
Vision System and Feature Extraction
3.1 Introduction'Vision System
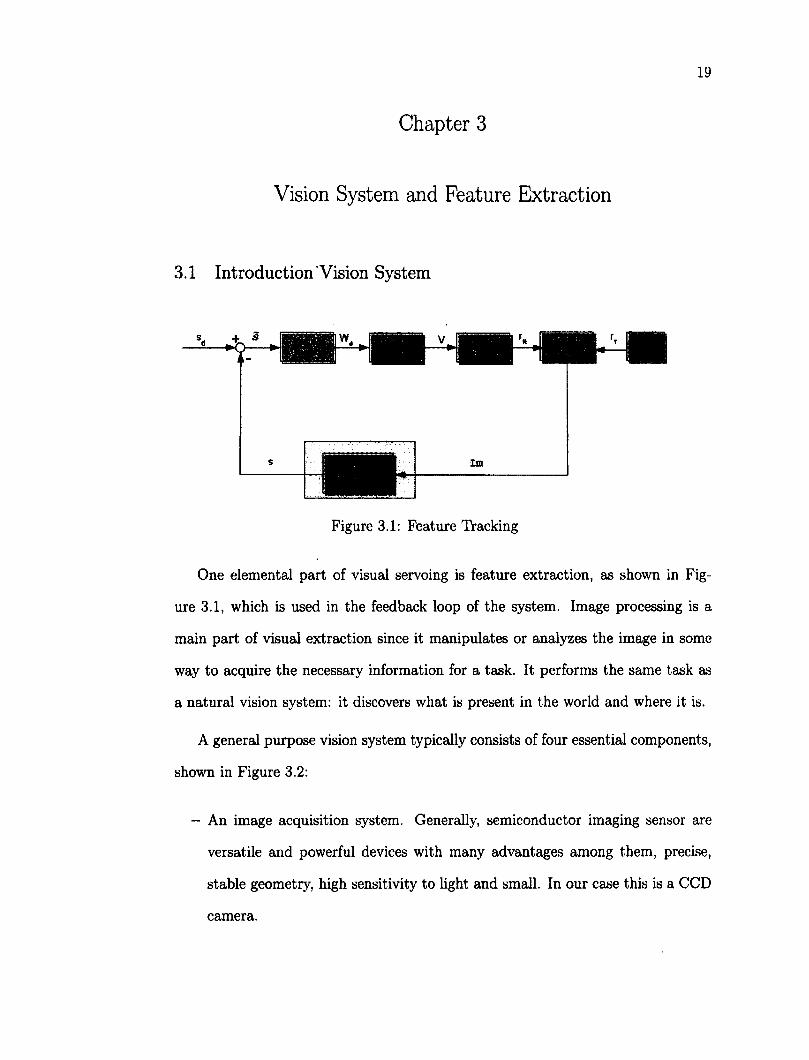
Figure 3.1: Feature Tracking
One elemental part of visual servoing is feature extraction, as shown in Fig
ure 3.1, which is used in the feedback loop of the system. Image processing is a
main part of visual extraction since it manipulates or analyzes the image in some
way to acquire the necessary information for a task. It performs the same task as
a natural vision system: it discovers what is present in the world and where it is.
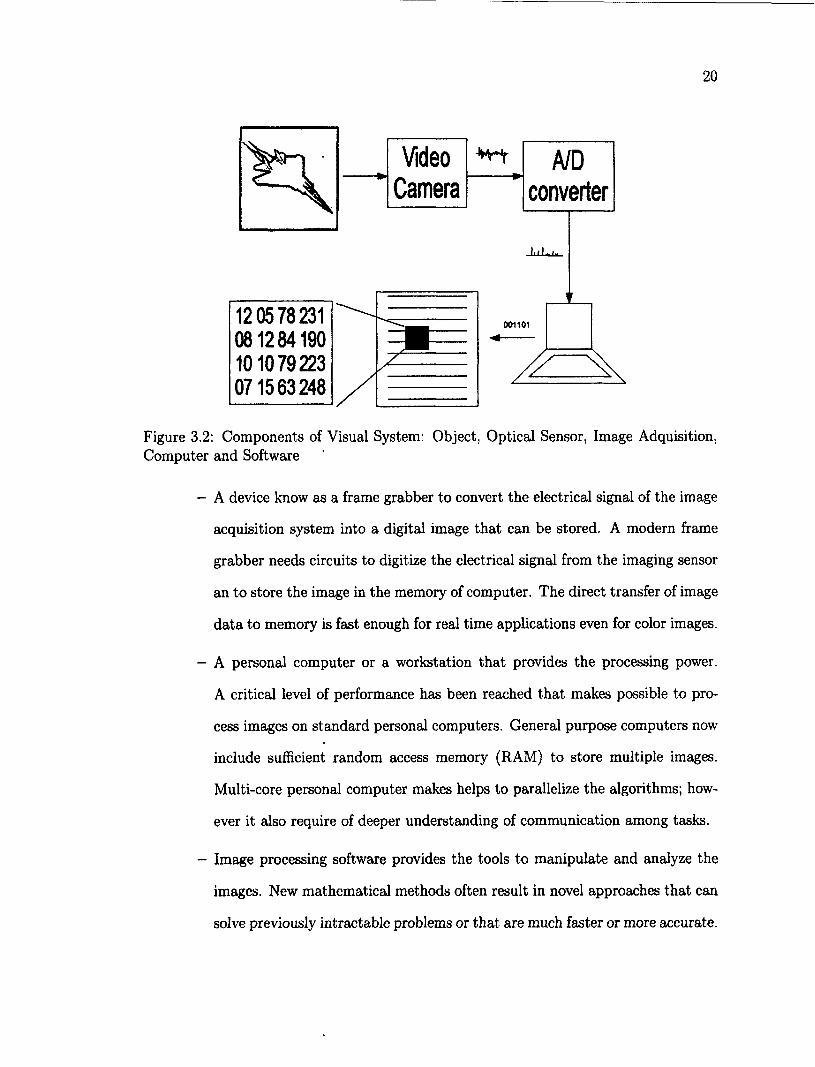
A general purpose vision system typically consists of four essential components,
shown in Figure 3.2:
- An image acquisition system. Generally, semiconductor imaging sensor are
versatile and powerful devices with many advantages among them, precise,
stable geometry, high sensitivity to light and small. In our case this is a CCD
camera.
20
Video 111 - 1 TTT A/D Camera converter
I I I l . i . l i i
12 05 78231 08 1284190 101079223 071563248
001101
Figure 3.2: Components of Visual System: Object, Optical Sensor, Image Adquisition, Computer and Software
- A device know as a frame grabber to convert the electrical signal of the image
acquisition system into a digital image that can be stored. A modern frame
grabber needs circuits to digitize the electrical signal from the imaging sensor
an to store the image in the memory of computer. The direct transfer of image
data to memory is fast enough for real time applications even for color images.
- A personal computer or a workstation that provides the processing power.
A critical level of performance has been reached that makes possible to pro
cess images on standard personal computers. General purpose computers now
include sufficient random access memory (RAM) to store multiple images.
Multi-core personal computer makes helps to parallelize the algorithms; how
ever it also require of deeper understanding of communication among tasks.
- Image processing software provides the tools to manipulate and analyze the
images. New mathematical methods often result in novel approaches that can
solve previously intractable problems or that are much faster or more accurate.
21
Often the speed-up that can be gained reaches several orders of magnitude.
Thus fast algorithms make many image processing techniques applicable and
reduce the hardware costs.
Image processing begins with the capture of an image with an acquisition sys
tem. In several applications, we may select the appropriate image system and set
up the illumination, to capture best the object feature of interest. Once the image
is sensed, it must be -transformed into a form that can be treated with a digital
computer: this process is called digitization. The first steps of digital processing
may include a number of different operations. For example, if the sensor has non
linear characteristics, such as fish-eye, these need to be corrected. Other common
operations can be applied if brightness, contrast and noise of the image are not
appropriate.
Likewise, other types of processing steps are necessary to analyze, identify and
track objects. Segmentation distinguishes the objects of interest from other objects
and the background. This is an easy task if an object is well distinguished from the
background by some local features; however this is not often the case. Therefore
more sophisticated techniques axe required. These techniques use various optimiza-
tion strategies to minimize the deviation between the image data and a given model
of the object.
But, what is an object? How can we represent it? There are no simple answers.
However, it is clear that we wish to capture the appearance of those recognizable
properties of the object, such as lumps, geometry, color and some time its motion.
This situation is easily accomplished by humans and computer vision systems only
perform elementary or well-defined fixed tasks. The human visual system is capable
to reduce the amount of received visual data to a small but relevant amount of
22
information. We could conclude that the human visual system can easily recognize
objects, but less well suited for accurate measurements of color, distances and areas.
3.2 Camera Model
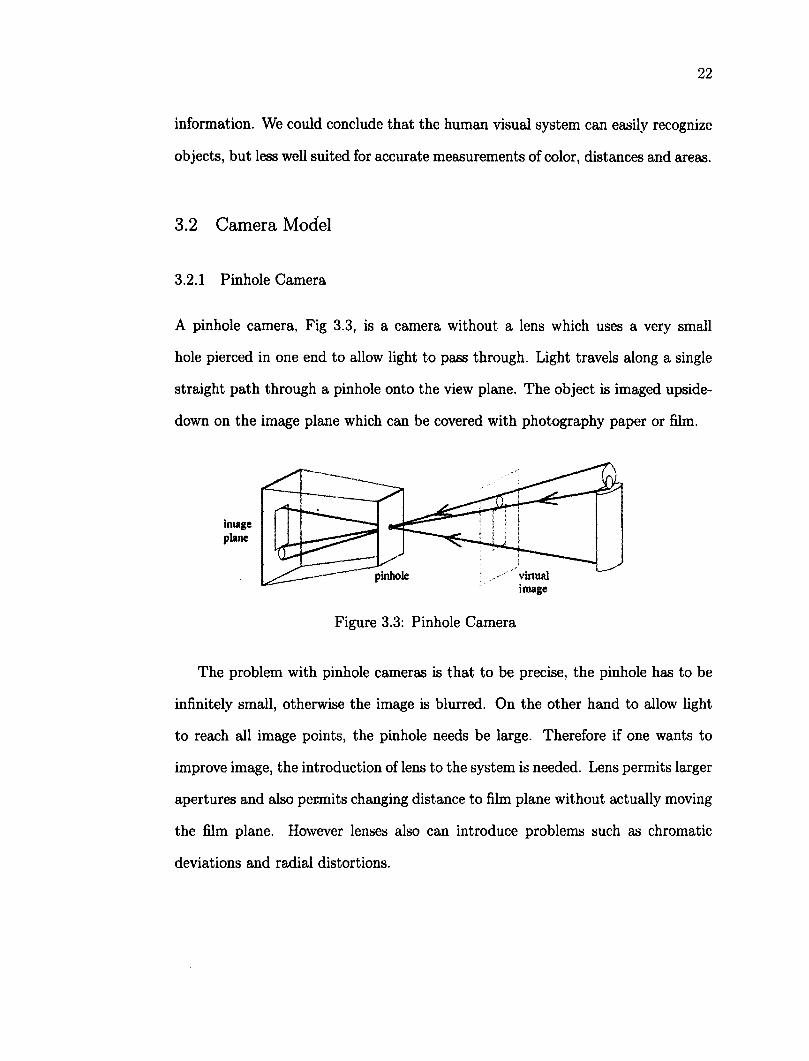
3.2.1 Pinhole Camera
A pinhole camera, Fig 3.3, is a camera without a lens which uses a very small
hole pierced in one end to allow light to pass through. Light travels along a single
straight path through a pinhole onto the view plane. The object is imaged upside-
down on the image plane which can be covered with photography paper or film.
The problem with pinhole cameras is that to be precise, the pinhole has to be
infinitely small, otherwise the image is blurred. On the other hand to allow light
to reach all image points, the pinhole needs be large. Therefore if one wants to
improve image, the introduction of lens to the system is needed. Lens permits larger
apertures and also permits changing distance to film plane without actually moving
the film plane. However lenses also can introduce problems such as chromatic
deviations and radial distortions.
irna plai
virtual image
Figure 3.3: Pinhole Camera
23
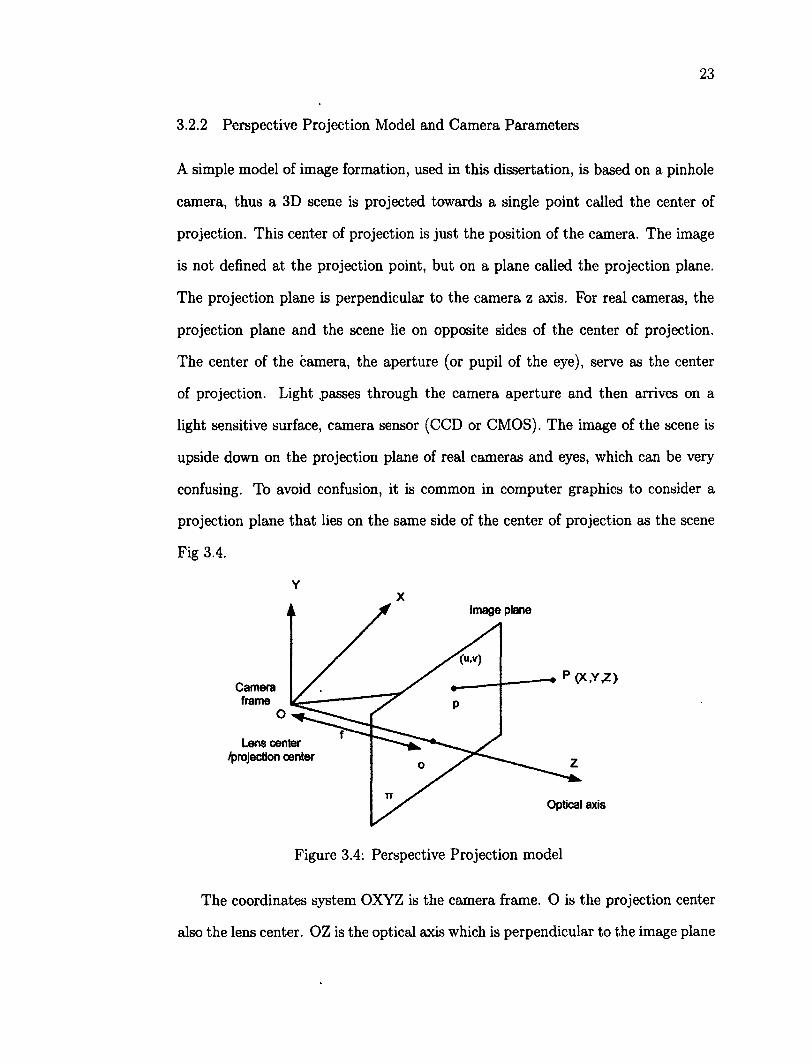
3.2.2 Perspective Projection Model and Camera Parameters
A simple model of image formation, used in this dissertation, is based on a pinhole
camera, thus a 3D scene is projected towards a single point called the center of
projection. This center of projection is just the position of the camera. The image
is not defined at the projection point, but on a plane called the projection plane.
The projection plane is perpendicular to the camera z axis. For real cameras, the
projection plane and the scene lie on opposite sides of the center of projection.
The center of the camera, the aperture (or pupil of the eye), serve as the center
of projection. Light .passes through the camera aperture and then arrives on a
light sensitive surface, camera sensor (CCD or CMOS). The image of the scene is
upside down on the projection plane of real cameras and eyes, which can be very
confusing. To avoid confusion, it is common in computer graphics to consider a
projection plane that lies on the same side of the center of projection as the scene
Fig 3.4.
Y X
Image plane
(U,V)
Camera frame
Lens center /projection center
Optical axis
Figure 3.4: Perspective Projection model
The coordinates system OXYZ is the camera frame. O is the projection center
also the lens center. OZ is the optical axis which is perpendicular to the image plane
24
7t\ Their intersection o is the principle point. The distance between projection
center O and the image plane 7r is the focal length /. P is a point in camera
frame with coordinates P(X, Y, Z) and p is its projection on the image plane. To
calculate p(u,v,z), the perspective projection of P(X,Y,Z) into the projection
plane at z = f we make use the similar triangles to write the ratios given by
u _ X
f " Z
" = f j , (3.1)
v _ y / ' z
v = f j (3.2)
The division by Z causes the perspective projection of more distant objects to
be smaller than that of closer objects. The relation between the camera and some
other world frame is a rigid motion, related to camera orientation and position. It
c a n b e r e p r e s e n t e d b y a n o r t h o g o n a l r o t a t i o n m a t r i x R , a n d a t r a n s l a t i o n v e c t o r t .
X r n ri2 f\3 £i
Y =
rai T 2 2 7*23 h
Z r n rz2 r33 h
P = RPw + t (3.3)
Measurements on the image plane are not made directly, because the image is
sampled in pixels. The relation between image plane point and pixel addresses is
modeled by an affine transformation. Aligning the pixel and the image coordinate
system so the u and x directions coincide, we obtain
25
au .
§ Sb
<
t
10 0 0
av - - 0 f y V 0 0 10 0
a 0 0 1 0 0 10
X
Y
Z
1
(3.4)
where the 5 coefficients f x , f y , k x y , uq and v 0 are the camera intrinsic parameters,
representing the focal length in horizontal pixels, focal length in vertical pixels,
skew coefficient, principle points coordinates respectively. We take the parameter
kxy to be zero because the lens distortion in our camera is minimal. Combining
(3.3) and (3.4) gives the direct linear transformation (DLT) [4] form of the camera
model:
au mn mi2 mi3 mu
av =
m21 Tfl 22 m2z m24
a m31 m3 2 m33 m34
y
1
(3.5)
This is the usual camera model for many vision system where the camera in-
trinsics and pose are not initially known. The transformation matrix is defined up
to a scale factor, thus there are 11 degrees of freedom.
3.2.3 Camera Calibration
To Calibrate the camera we need to fix the 11 unknowns in the 12 parameters
This is done by having at least 6 points of known position, not all coplanar. Each
observation generates two homogeneous equations in terms of m^,
mn X + m^Y + rtiizZ + m14 u =
v —
mz\X + m32y + m33 Z + ra34
77?21 X + TH22Y + 77123 Z ^24 m3 \X + m32y + m33Z + m34'
(3.6)
(3.7)
26
if n points are available, we can write it as a 2n x 12 matrix
X Y Z 1 0 0 0 0 -uX ~uY -uZ -u
0 0 0 0 X Y Z 1 -vX -vY -vZ -v
m i i
ml2
m u
= 0 (3.8)
Since the system is homogeneous, we can constrain m34 = 1 and solve nsing
linear least square estimation. If image positions are noisy, the results can be
improved by taking more than 6 points. As in [6], we use a special calibration
object with very accurate grids.
Since the linear method is ill-conditioned, we use a large number of reference
points (49) as in [107]. A better solution is to solve for ||m|| = 1, as in [48], then
the solution correspond to the smallest singular value of the matrix in (3.8). Then
this solution is use as starting point for a minimization of the difference between
the measured and projected point. Other calibration methods based on nonlinear
optimization and decomposition of the matrix M have yielded better results [38],
but the linear method is sufficient for our robust visual servoing system. Having
obtained the DLT form, the intrinsic and extrinsic parameters can be extracted if
required.
3.3 Feature Extraction
Three key processes are required in feature extraction, and they are defined as
modeling, identification and motion prediction of an object in the image plane
as the object moves around a scene. In other words, a "tracker" that follows
the tracked object in different frames of a video. Additionally, depending on the
tracking task, a tracker can also provide information about the object, such as
27
orientation, area, or shape of an object. Tracking objects can be challenging due
to:
- Loss of information caused by projection of the 3D world on a 2D image.
- Noise in images.
- Complex object motion.
- Partial and full object occlusions.
- Scene illumination changes.
- Complex object shapes.
- Non-rigid or articulated nature of objects.
- Real-time processing requirements.
One can simplify .tracking by imposing constraints on the motion and/or ap
pearance of objects. For example, many tracking algorithms assume that the object
trajectory to be is smooth or the changes to be continuous. One can also restrict
the object motion to be of constant velocity or constant acceleration based on past
information. The size of objects, shape and the object appearance, can also be
used to simplify the problem.
The three key steps in object tracking analysis are shown in Figure 3.5 : Object
modeling, object identification, and analysis of object tracks to recognize their
behavior.
3.3.1 Object Modeling
Object modeling plays a essential role in visual tracking because it distinguishes
an object of interest from the background. The feature is defined by the object
28
r ..
• .• • . - : - v - 1 f e
........ .. . .... . • • • .. ... . . V . ..
IMt* Mint-*11 -
'
• : . . •
•
V
.. ' •
Figure 3.5: Key steps on Object Tracking
model and is used to maintain the estimate of the track. Object modeling therefore
consists of two attributes: the representation of the object and the features. A
poor choice of object model inevitably leads to poor tracking. The range of ob
ject representations included various types of models and is application dependent.
Some applications only required a simple model while others required more complex
object models to achieve tracking.
3.3.1.1 Parametric Representations
The parametric representation is simple because it models the object with basic ge
ometric shapes by few number of parameters. Various signal processing operations
such as transforms, estimations or learning can be directly applied to parameters
in order to achieve tracking. Parametric representations are desirable when more
accurate information of the object is not available or the representation are too
time-consuming to obtain. Traditional shapes can be of any form as long as their
representation is parametric and compact. In practice, almost every tracking sys
tem based on conventional shapes makes use of two representations: rectangular
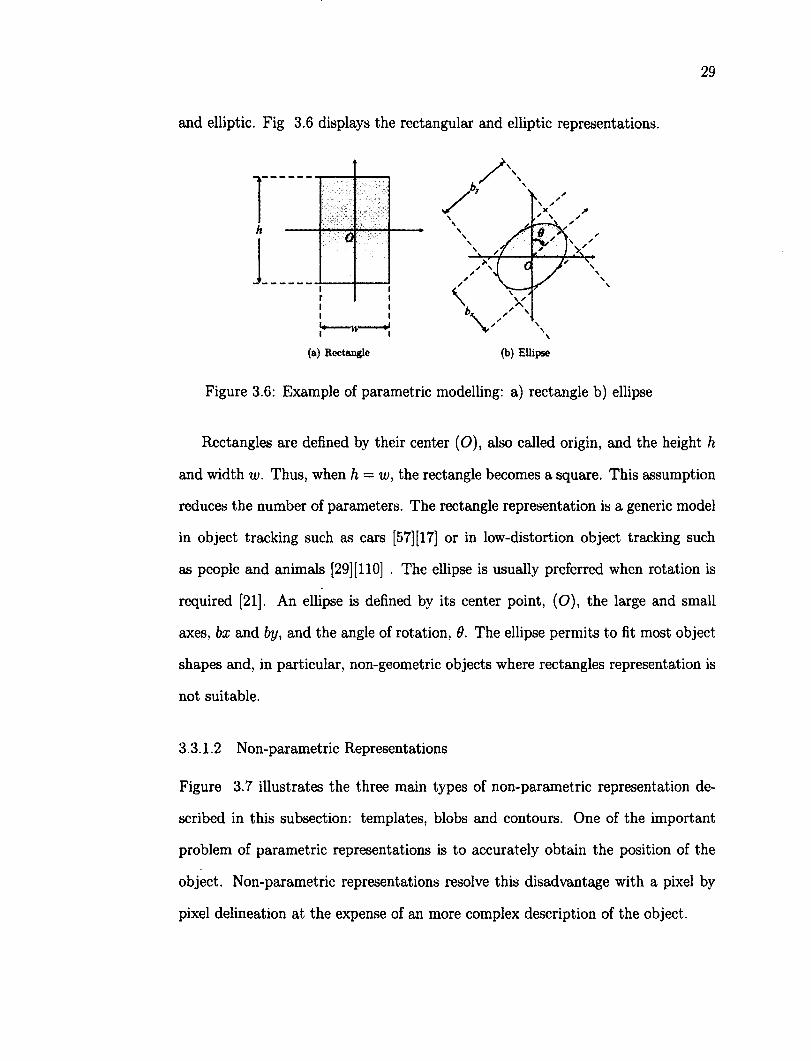
29
and elliptic. Fig 3.6 displays the rectangular and elliptic representations.
Figure 3.6: Example of parametric modelling: a) rectangle b) ellipse
Rectangles are defined by their center (O), also called origin, and the height h
and width w. Thus, when h = w, the rectangle becomes a square. This assumption
reduces the number of parameters. The rectangle representation is a generic model
in object tracking such as cars [57] [17] or in low-distortion object tracking such
as people and animals [29] [110] . The ellipse is usually preferred when rotation is
required [21]. An ellipse is defined by its center point, (O), the large and small
axes, bx and by, and the angle of rotation, 9. The ellipse permits to fit most object
shapes and, in particular, non-geometric objects where rectangles representation is
not suitable.
3.3.1.2 Non-parametric Representations
Figure 3.7 illustrates the three main types of non-parametric representation de
scribed in this subsection: templates, blobs and contours. One of the important
problem of parametric representations is to accurately obtain the position of the
object. Non-parametric representations resolve this disadvantage with a pixel by
pixel delineation at the expense of an more complex description of the object.
h
\ \ \
(a) Rectangle (b) Ellipse
30
a)Template b)Contour C)B|0b
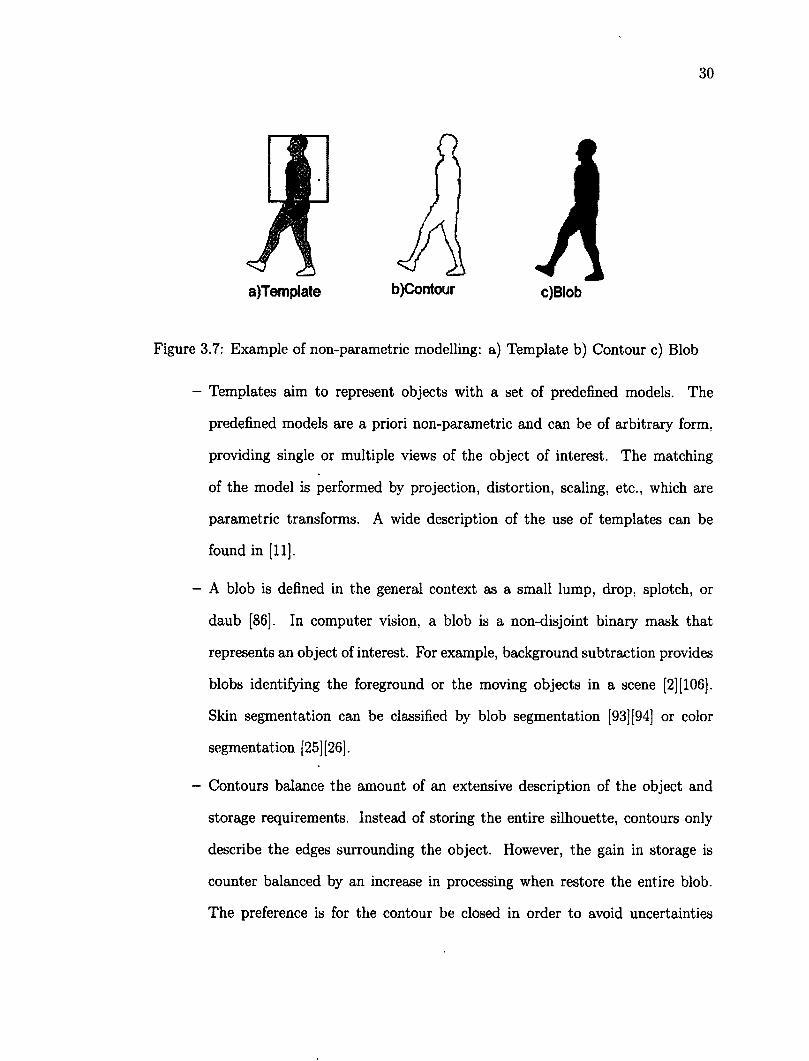
Figure 3.7: Example of non-parametric modelling: a) Template b) Contour c) Blob
- Templates aim to represent objects with a set of predefined models. The
predefined models are a priori non-parametric and can be of arbitrary form,
providing single or multiple views of the object of interest. The matching
of the model is performed by projection, distortion, scaling, etc., which are
parametric transforms. A wide description of the use of templates can be
found in [11].
- A blob is defined in the general context as a small lump, drop, splotch, or
daub [86]. In computer vision, a blob is a non-disjoint binary mask that
represents an object of interest. For example, background subtraction provides
blobs identifying the foreground or the moving objects in a scene [2] [106].
Skin segmentation can be classified by blob segmentation [93] [94] or color
segmentation [25] [26].
- Contours balance the amount of an extensive description of the object and
storage requirements. Instead of storing the entire silhouette, contours only
describe the edges surrounding the object. However, the gain in storage is
counter balanced by an increase in processing when restore the entire blob.
The preference is for the contour be closed in order to avoid uncertainties
31
in the reconstruction, although some techniques [61] [18] can handle small
breaks in the continuity of the shape. Despite these requirements, contours are
widely used because a tracking framework based on splines has been developed
[44] [115]. Splines are a piecewise function of polynomials with smoothness con
straints. They were introduced by Schoenberg in 1946 [99]. The description of
splines below is based on [108]. A spline s modeling the contour C = k\,.., kn
is described as
where is a B-spline function and c(k) are estimated coefficients. The objec
tive of contour tracking is the estimation of the parameters c(k) and the spline
basis. Applications of active contours for object tracking are varied, from
tracking with optical flow [44] or through severe occlusion [13] [3] to Bayesian
estimation [116].
3.3.2 Object Identification
Object identification, also called object detection, is a elemental step towards track
ing; the object of interest needs to be identified in the frame before estimation of
its position can be performed. Object identification can either provide the ini
tialization for a tracking algorithm only or can be integrated into the tracking
algorithm to provide object identification. Detection is based on object modeling
and it depends on the selection of the features. We investigate in this section the
different techniques employed for object identification, namely, supervised learning,
distribution representation and segmentation.
N
(3.9)
32
3.3.2.1 Supervised Learning
Supervised learning techniques learns complex patterns from a set of samples given
by a certain type of classification. Learning provides high-level decisions from the
available data based on the analysis of low-level, from simple elementary features.
Several theses, books and journal articles are entirely dedicated to supervised learn
ing techniques [9] [46]. This subsection provides a short introduction to artificial
neural networks and support vector machines, the main algorithms used for object
detection nowadays.
- Artificial Neural Networks (ANNs) for pattern recognition started with the
invention of the perceptron in 1957 by Rosenblatt [92]. ANNs are composed
by a more simple basic elements, the neuron, and its associated activation
function. The Multi-Layer Perceptron (MLP) is the basic ANN. In object
recognition, the input vector is a set of features. The learning phase aims to
teach the desired behavior to the ANNs using a supervised learning algorithm.
Traditionally, the minimization of the empirical risk is used in the training
process. For sample n in the training dataset, let us denote the desired output
d of the linear ANN to a given input x. If the actual output is yg, the empirical
risk is expressed as
fi(y) = E^»")'<i<n)) + AnW <3'10> n=l
and
• y e ( x ) = W i X i + W 2 X 2 + \ - w n x n + b (3.11)
where is a cost function and fi(0) is regularization term to penalize large
weights w. The minimization of the empirical risk R(y) is achieved through
the adjustment of the set of weights in the neural network. Empirical risk
33
minimization has, as its objective, the convergence of the output y to the
d e s i r e d o u t p u t d v i a m i n i m i z a t i o n o f t h e c o s t f u n c t i o n R ( y ) .
Artificial neural networks are found in a wide variety of applications from
object detection, such as faces [74] and pedestrians [70], to vehicles [112] or
skin detection [66]. Also, different types of neural networks exist, depending
on the type of connections such as recurrent networks (e.g. , Hopfield networks
[53]]), the choice of activation functions (e.g. . Radial Basis Function networks)
or dimension of the input (convolutional networks).
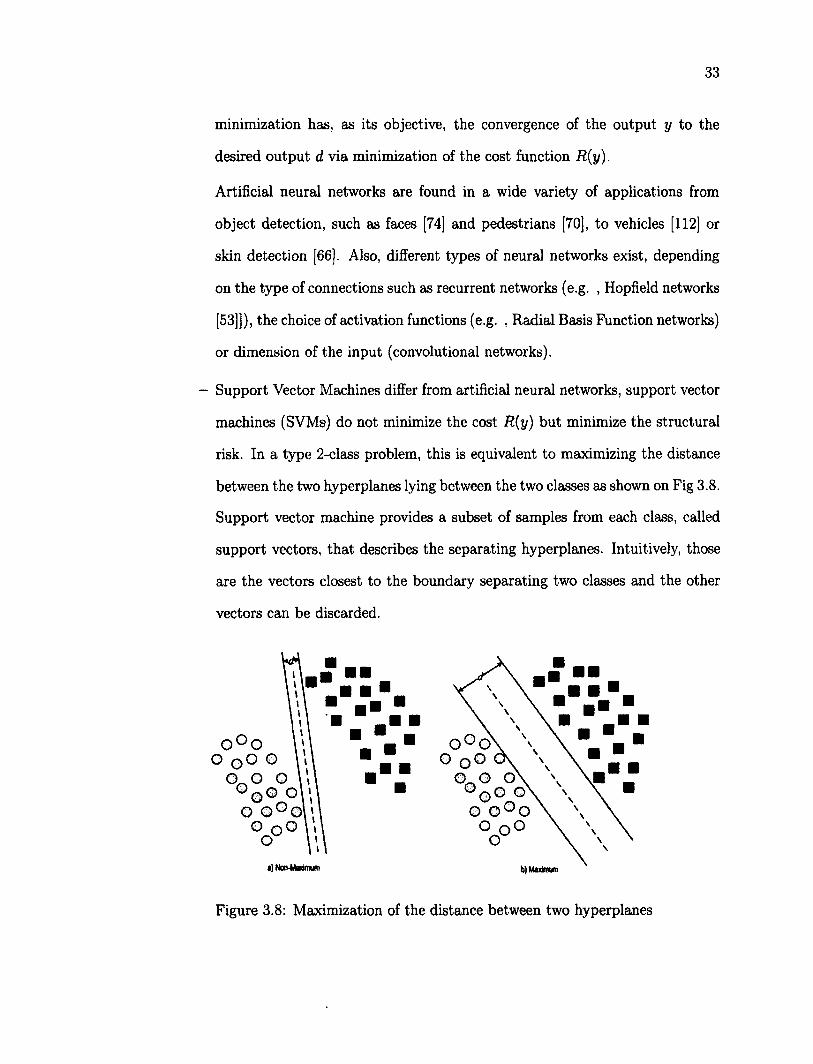
Support Vector Machines differ from artificial neural networks, support vector
machines (SVMs) do not minimize the cost R(y) but minimize the structural
risk. In a type 2-class problem, this is equivalent to maximizing the distance
between the two hyperplanes lying between the two classes as shown on Fig 3.8.
Support vector machine provides a subset of samples from each class, called
support vectors, that describes the separating hyperplanes. Intuitively, those
are the vectors closest to the boundary separating two classes and the other
vectors can be discarded.
O u O O O O
O O O \\ Q o° o\\ O o°©\«
t a)Non-Msdmum b) Maximum
Figure 3.8: Maximization of the distance between two hyperplanes
34
It can be shown that training an SVM is equivalent to solving a linear con
strained quadratic problem [34]. The reader is referred to [111] for a com
prehensive introduction on SVMs and to [88] for a practical tutorial on SVM
implementation. Support vector machines have been successfully applied to
object detection with infrared cameras [88], pedestrian [54], eyes [65] and mov
ing object [59].
3.3.2.2 Distribution Representation
Distribution representation is one of the cornerstones in robust object tracking. A
useful representation of an object is the distribution of its features. If an object
of interest is known by its feature distribution, then a detection can be performed
by distribution matching in the frame. Two different types of distribution repre
sentations exist: parametric and non-parametric. The first one assumes a pre-set
functional to model the distribution, e.g. Gaussian mixture models, while the
second one relaxes this constraint at the expense of computation time cost. The
different techniques related to distribution representation includes, object detection
via histograms by Bhattacharyya measure, the region matching methods by SSD,
and object detection by background subtraction.
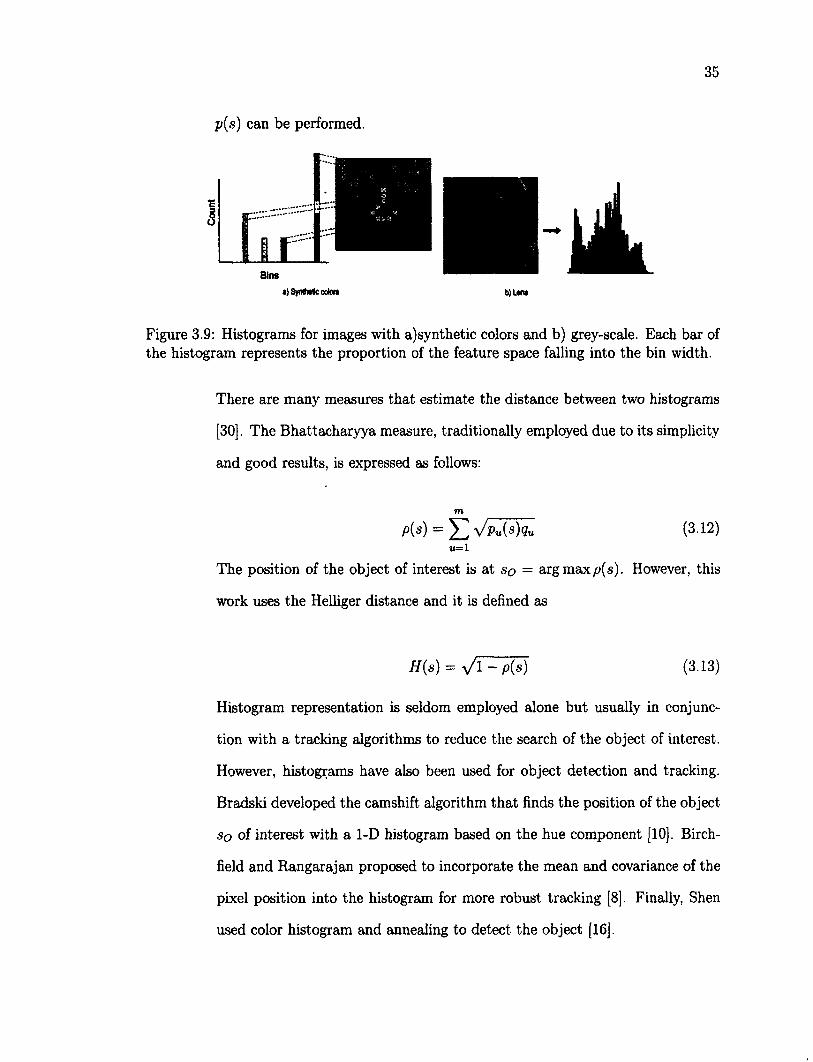
- Histogram representation is a non-parametric representation of the features,
sampling the feature space in m bins. Histograms can model the distribution
of object features such as colors, edges, corners, vector flows, and so on. Fig
ure 3.9 displays examples of color histograms. Let us now assume that a prior
model of the object feature q, also called the target, is known. A candidate
histogram p(s) can be defined by the representation of the features in a patch
centered on s. To detect the object in the image, the minimization of a simple
distance measure between the target histogram q and a candidate histogram
35
p ( s ) can be performed.
Bins
*)3ynMle colon b)Ura
Figure 3.9: Histograms for images with a)synthetic colors and b) grey-scale. Each bar of the histogram represents the proportion of the feature space falling into the bin width.
There are many measures that estimate the distance between two histograms
[30]. The Bhattacharyya measure, traditionally employed due to its simplicity
and good results, is expressed as follows:
U=1
The position of the object of interest is at s o — argmax p ( s ) . However, this
work uses the Helliger distance and it is defined as
Histogram representation is seldom employed alone but usually in conjunc
tion with a tracking algorithms to reduce the search of the object of interest.
However, histograms have also been used for object detection and tracking.
Bradski developed the camshift algorithm that finds the position of the object
so of interest with a 1-D histogram based on the hue component [10], Birch-
field and Rangarajan proposed to incorporate the mean and covariance of the
pixel position into the histogram for more robust tracking [8], Finally, Shen
used color histogram and annealing to detect the object [16].
m
(3.12)
H ( s ) = a/WM (3.13)
36
- Sum of square difference is commonly used when the signal to noise ratio
(SNR) of an image is poor and the local computation of the spatio-temporal
derivatives can be inaccurate. Matching region methods are usually based on
the maximization of the Normalized Cross-Correlation (NCC), (3.16), or the
minimization of a distance between region. Given an image I and a feature s,
the square Euclidean distance between the image and the feature at a given
position (x, y), also referred to as SSD,
S S D ( x , y ) = ' ^ T [ I { x , y ) 2 + s ( x — d x , y — d y ) 2 - 2 1 { x , y ) s { x - d x , y - d y ) ] dx,dy
(314)
A cross-correlation measure can be calculated as:
C o r r i j ( x , y ) = ^ 2 I ( x , y ) s ( x - d x , y - d y ) (3.15) dx,dy
As this measure depends on the intensity distribution in the image and on the
size of the feature, a normalized version can be derived as,
Yljr rin U(x, y) — 71 f s (x — d x , y — d y ) — s i NCCjj(x, y) = JL^ (3.16)
\/Edx,<iy [J(x> y) - 7]2 [s(® — d x , y — d y ) - s]2
where s and 7 are the mean of the feature and the mean of the image region
on which lies the feature, respectively. These methods are in fact similar to
differential techniques in the sense that they both minimize a distance metric
but they are applied to a larger scale, and therefore relatively robust to noise.
- Background modeling is a technique used in computer vision to extract rele
vant motion from a sequence of images. In the early days of computer vision,
[60] proposed a frame differencing algorithm subtracting two consecutive im
ages from one another, thus canceling static areas in the scene. Since then,
37
the research effort has focused on improving the modeling of the background.
Several works have successfully combined the Gaussian mixture model with
different techniques to increase the robustness of the foreground detection. For
instance, [120] merged the foreground extracted by the mixture of Gaussians
algorithm with the optical flow to obtain better segmentation of foreground
objects. The multi-scale approach has been used to enhance the discrimina
tion between the background and the foreground [58]. Active contours [14]
and skin detection [90] have also been combined with the Gaussian mixture
model to provide better delineation of the foreground blob.
3.3.3 Object Tracking
The relation between object representation, object identification and tracking is
very strong because tracking is performed on representative features of the object
defined by the first two tasks. The object is represented by a feature vector that
i n c l u d e s s o m e c h a r a c t e r i s t i c s t o t r a c k . T h e f e a t u r e v e c t o r a t t i m e t i s d e n o t e d x t .
If it is assumed that tracking of an object starts at time t = 1, then the feature
track X at time t — T is defined as
X = {xt\t = l...T). (3.17)
Some models assume that the feature vector x t and the track X are not accessi
ble, but only an observation zt is. In this case, the observation track can be defined
in a similar way
Z = { z t \ t = l . . . T } . (3.18)
Finally, we denote a portion of feature track from start time t 3 to finish time t f as
xt,-tf = {xt\t = and likewise for the observation track zts:tf — {zt\t =
38
Note that X and Z can be denoted by X = x\-r and Z — z\-t. In this section, we
present deterministic and probabilistic tracking, the two main approaches in the
field. The handling of occlusions which relies upon object representation, identifi
cation and tracking is also introduced.
3.3.3.1 Deterministic Tracking
Deterministic tracking has been commonly in the literature due to its simplicity.
The terminology deterministic means that the tracking algorithm does not inte
grate any uncertainty in the modeling of the problem. Nevertheless, this does not
mean that problems that includes noise or other kind of uncertainty cannot be
tackled by deterministic algorithms. Simply put, the uncertainty is not taking into
account here. Deterministic algorithms are convenient because they require little
computation. They traditionally rely on simple parametric tracking for points and
contours. However, more advanced models and in particular kernel-based tracking
have also been implemented. Tracking relies on a set of samples to determine the
state of the feature vector at time t from a portion of the feature track. Without
loss of generality and because the feature vector depends at most on the entire
feature track at time t — 1, xt is written as
= /(Zl:t-1,©), (3.19)
where 0 is the vector of parameters. Normally, the problem is reduced to a
linear or locally linearized transform to simplify calculations so that the tracking
can be formulated in matrix form, i.e. , xt = Parametric techniques
were essentially employed in the early research because of the great performance
they offered for a low computational cost. [95][96] define rigid constraints to find
the optimum match of the feature vector state. Multi-scale approaches [5] and
39
direct kernel bandwidth tuning have been proposed in recent years. Multiple kernel
tracking has also been proposed to tackle the problem [42]. Finally, [82] proposed
to estimate the kernel bandwidth and initialization through the Kalman filter for
the purpose of vehicle tracking .
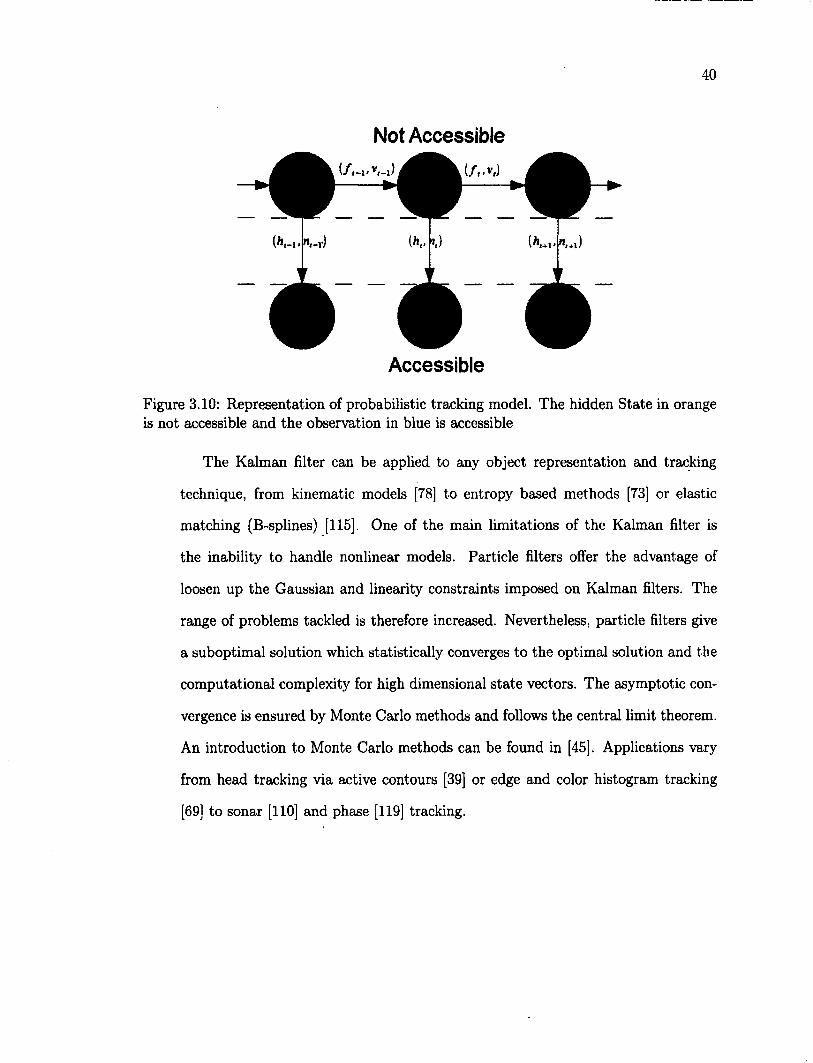
3.3.3.2 Probabilistic Tracking
Probabilistic tracking has emerged from the need to account for uncertainty in
tracking. There are several sources of uncertainties in a sequence of images. First,
the signal is degraded with noise. And secondly, the information on the object of
interest can be inaccessible due to occlusion or clutter. The probabilistic model is
composited of two layers: a hidden layer, representing the state, and an observation
layer, providing inference on the state. Figure 3.10 shows a schematic view of the
system. The equations can be expressed as follows:
where ft-i and ht are vector functions; they are assumed to be known and
possibly nonlinear and time dependent. The functions depend on the states xt~i
and xt and observation noises. vt~i and nt, respectively. The hidden Markov model
sets up the framework for recursive Bayesian filtering. The Bayesian approach
p r o v i d e s s o m e d e g r e e o f b e l i e f f o r t h e s t a t e x t f r o m t h e s e t o f o b s e r v a t i o n s Z t =
{zi,z2,..., zt} available at time t. In other words, the Bayesian recursion estimates
the posterior density p(xt\Zt) to estimate the state of an object using Bayes rule.
The Bayesian recursion is performed in two steps: prediction and update.
xt = /t-i(»t-i.Vt-i) (3.20)
Z t — h t { X t , T l t ) , (3.21)
40
Not Accessible
Accessible
Figure 3.10: Representation of probabilistic tracking model. The hidden State in orange is not accessible and the observation in blue is accessible
The Kalman filter can be applied to any object representation and tracking
technique, from kinematic models [78] to entropy based methods [73] or elastic
matching (B-splines) [115]. One of the main limitations of the Kalman filter is
the inability to handle nonlinear models. Particle filters offer the advantage of
loosen up the Gaussian and linearity constraints imposed on Kalman filters. The
range of problems tackled is therefore increased. Nevertheless, particle filters give
a suboptimal solution which statistically converges to the optimal solution and the
computational complexity for high dimensional state vectors. The asymptotic con
vergence is ensured by Monte Carlo methods and follows the central limit theorem.
An introduction to Monte Carlo methods can be found in [45]. Applications vary
from head tracking via active contours [39] or edge and color histogram tracking
[69] to sonar [110] and phase [119] tracking.
41
3.3.4 Occlusion Handling
Occlusion is defined as the lack of visual clues either partially or totality of the
object. The ability of tracking algorithms to handle occlusion is crucial to provide
a good estimate of the object state. Occlusion handling decreases the effects of the
lack of information on an object under occlusion. There exist three different cases
of occlusion:
- Self occlusion: The object of interest is articulated and the constraints on
motion does not prevent the overlap when the object is projected on the
camera plane.
- Inter-object occlusion: The object of interest is occluded by another object in
the frame. Inter-object occlusion can occur at any time since the environment
in which the object evolves is not controlled. Inter-object occlusion can be of
any duration.
- Occlusion from a background object: The object of interest is occluded by
the background. Typically, the object passes behind a tree, a house, etc. The
background is usually static and therefore enables the learning of inference on
occlusion. However, occlusion is usually total and the observation zt does not
exist.
The testing a disrupted observation z leads to the detection of occlusion. For
instance, alterations on observations are a clue to occlusion. In other words, if
the probability of an observation drops rapidly, the object can be partial or to
tal occlusion. Analysis of the observation, such as probability of occurrence and
thresholding provides criteria to potential occlusion. Occlusion detection is crucial
since it provides an indicator of the tracking confidence.
42
3.4 Artificial Immune System Tracking (Proposed approach)
In this section we introduce a framework to track the features of interest for the
visual servoing control. Despite feature tracking is an important requirement in
Visual servoing, many researches neglect this part of the problem. In order to
have more realistic scenarios, we have to tackle many assumptions used to make
the tracking problem tractable, for example, illumination constancy, partial occlu
sion. clutter, high contrast with respect to background, etc. Thus, tracking and
associated problems of feature selection, object representation, dynamic shape, and
motion estimation are considered in this framework.
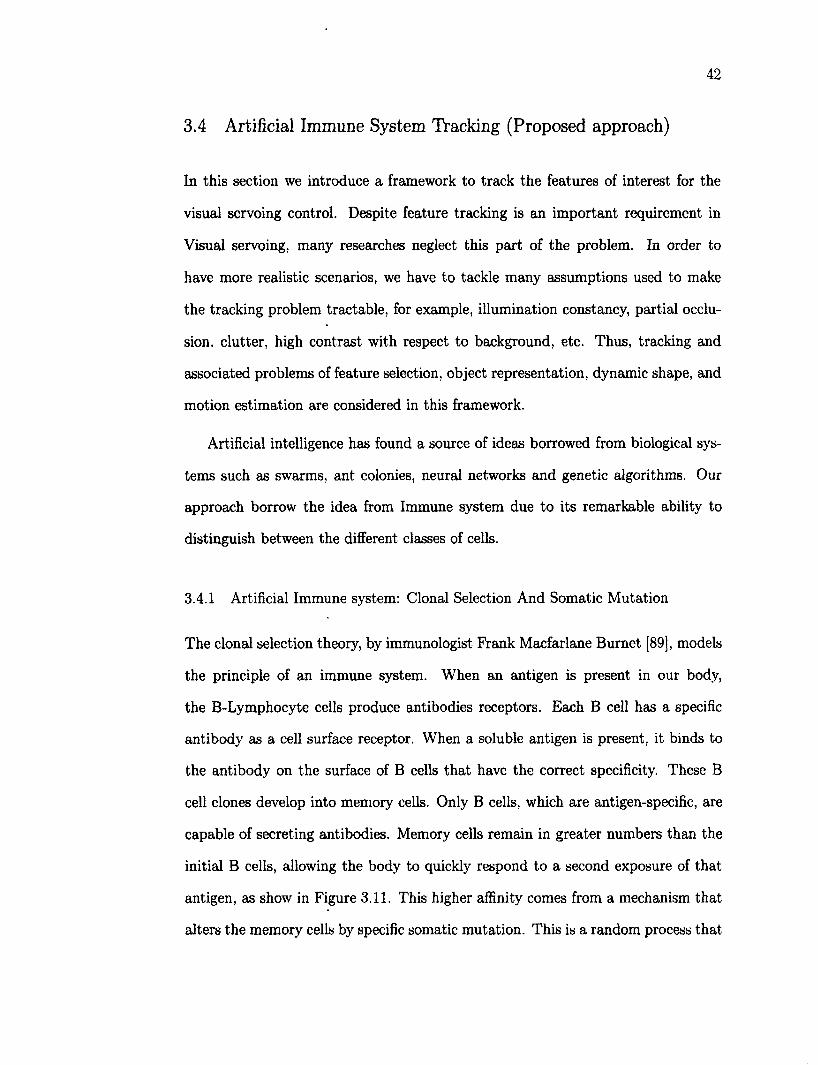
Artificial intelligence has found a source of ideas borrowed from biological sys
tems such as swarms, ant colonies, neural networks and genetic algorithms. Our
approach borrow the idea from Immune system due to its remarkable ability to
distinguish between the different classes of cells.
3.4.1 Artificial Immune system: Clonal Selection And Somatic Mutation
The clonal selection theory, by immunologist Frank Macfarlane Burnet [89], models
the principle of an immune system. When an antigen is present in our body,
the B-Lymphocyte cells produce antibodies receptors. Each B cell has a specific
antibody as a cell surface receptor. When a soluble antigen is present, it binds to
the antibody on the surface of B cells that have the correct specificity. These B
cell clones develop into memory cells. Only B cells, which are antigen-specific, are
capable of secreting antibodies. Memory cells remain in greater numbers than the
initial B cells, allowing the body to quickly respond to a second exposure of that
antigen, as show in Figure 3.11. This higher affinity comes from a mechanism that
alters the memory cells by specific somatic mutation. This is a random process that
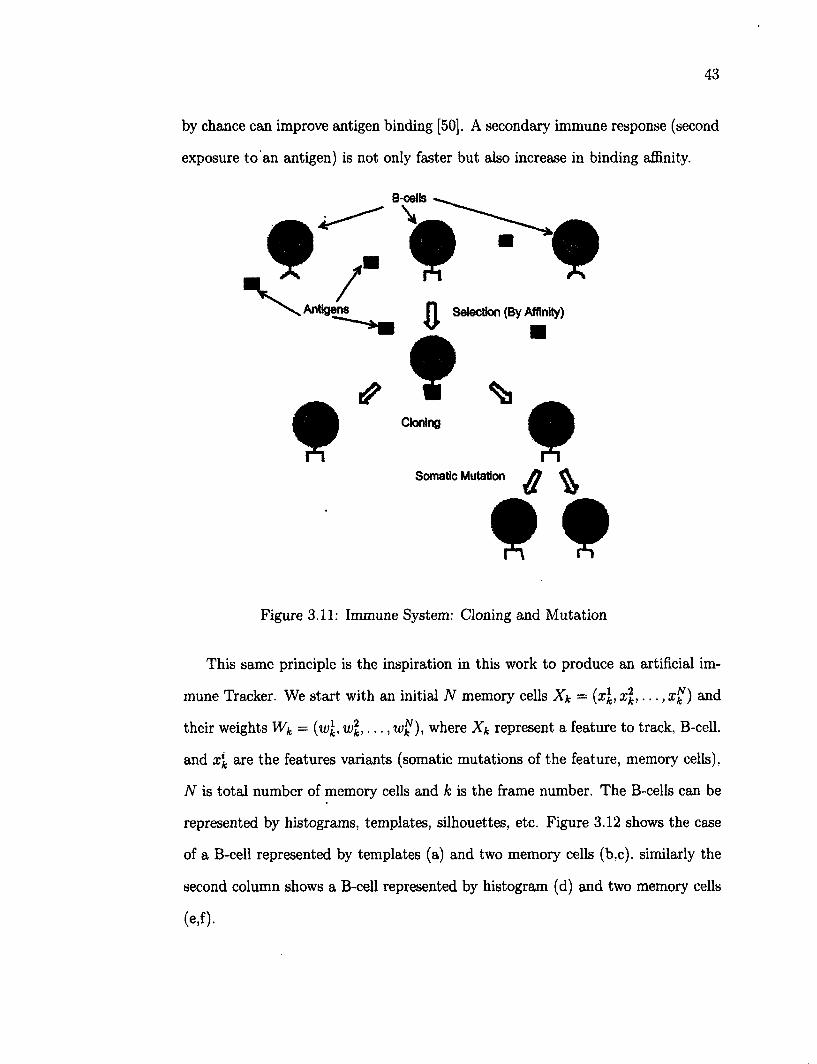
43
by chance can improve antigen binding [50]. A secondary immune response (second
exposure to an antigen) is not only faster but also increase in binding affinity.
Q amII#
Figure 3.11: Immune System: Cloning and Mutation
This same principle is the inspiration in this work to produce an artificial im
mune Tracker. We start with an initial N memory cells Xk = {x\, x\,... ,xk) and
their weights Wk = (wk, uuk,..., wk), where Xk represent a feature to track, B-cell.
and xk are the features variants (somatic mutations of the feature, memory cells),
N is total number of memory cells and k is the frame number. The B-cells can be
represented by histograms, templates, silhouettes, etc. Figure 3.12 shows the case
of a B-cell represented by templates (a) and two memory cells (b.c). similarly the
second column shows a B-cell represented by histogram (d) and two memory cells
Selection (By Affinity)
Cloning
Somatic Mutation
(e,f).
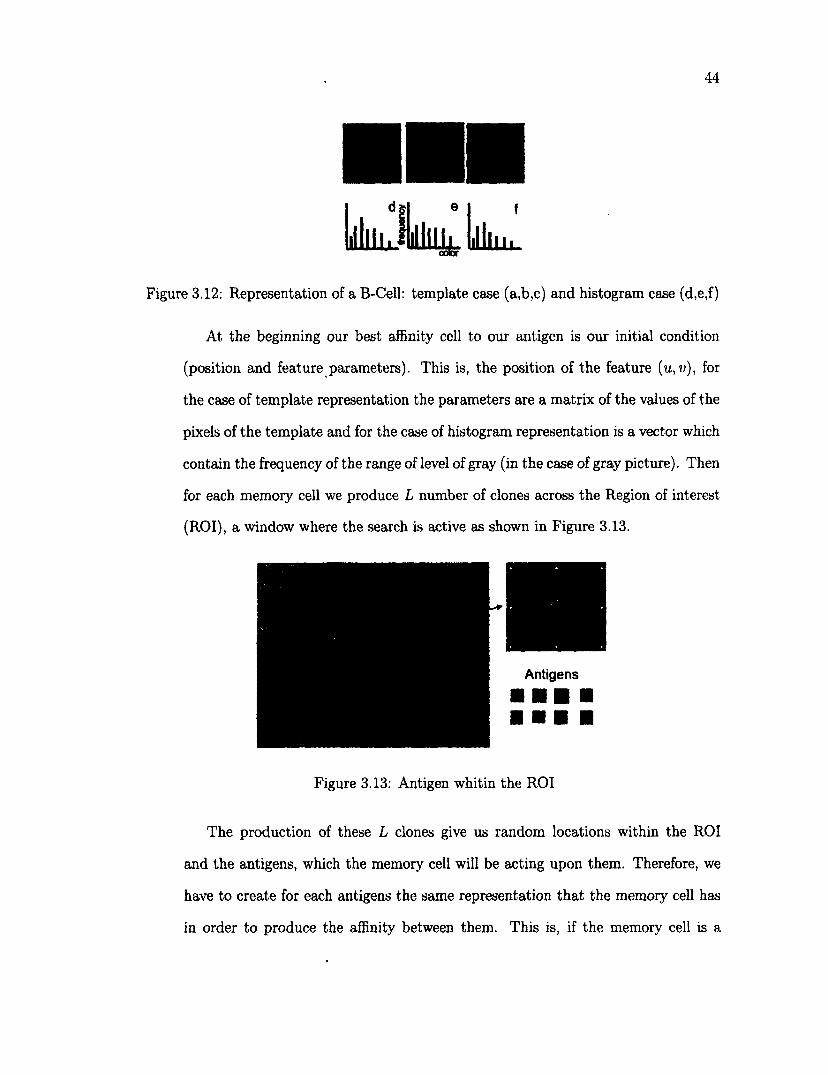
44
e
lllli. flllllll^ lillhi.
Figure 3.12: Representation of a B-Cell: template case (a,b,c) and histogram case (d,e,f)
At the beginning our best affinity cell to our antigen is our initial condition
(position and feature parameters). This is, the position of the feature (u, v), for
the case of template representation the parameters are a matrix of the values of the
pixels of the template and for the case of histogram representation is a vector which
contain the frequency of the range of level of gray (in the case of gray picture). Then
for each memory cell we produce L number of clones across the Region of interest
(ROI), a window where the search is active as shown in Figure 3.13.
Antigens
Figure 3.13: Antigen whitin the ROI
The production of these L clones give us random locations within the ROI
and the antigens, which the memory cell will be acting upon them. Therefore, we
have to create for each antigens the same representation that the memory cell has
in order to produce the affinity between them. This is, if the memory cell is a

45
histogram then the representation of the antigen is a histogram too.
After the creation of the antigen, we applied the affinity function /(.) with its
correspondence weight w, in order to calculate the total affinity A of the antigen
Y and the memory cell given by,
where / € [0,1], I = [1,..., L) and i = [1,..., N\ . The total affinity represent the
similitude among a particular antigen Yl and the memory cells xl for a particular
B-Cell X, the feature. The affinity function /(.) is related to representation but
not unique, for example the affinity function for histograms could be the Helliger
distance (3.13) or Battacharyya measure (3.12) and for template could be the SSD
(3.14) or a normalized cross-correlation (3.16).
For example for 3 memory cells (histrogram representation) and 4 clones the
total affinity will be,
and /(.) is the Helliger distance for each antigen tested Y. Then, according to
their total affinity we determine the best cell that match our antigen as Xbest =
maxf^l1, A2,..., A4},.thus it gives best position of that feature.
Other affinity functions are used to complement the affinity function, an exam
ple is the dynamic of the feature as mention in the object tracking section 3.3.3. For
example, /(.) = fi{x, Y)f2{x(s),x(s)), where fi(x, Y) is the measure of similarity
N
(3.22)
clonel : yl1 = w 1 f ( x 1 , V1) -I- w 2 f {x 2 , V1) + w 3 f ( x 3, y1), (3.23)
clone2 : A 2 = w l f ( x l , Y 2 ) + w 2 f ( x 2 , Y 2 ) + w 3 f ( x 3 , Y 2 ) , (3.24)
clone3 : A 3 = w 1 f ( x 1 , Y 3 ) + w 2 f {x 2 , Y 3 ) + w 3 f ( x 3 , K3), (3.25)
clone4 : A 4 = w l f {x \Y 4 ) + w 2 f ( x 2 , Y 4 ) + w 3 f ( x 3 , Y 4), (3.26)
46
in parameters between antigen and antibody, and f2(x(s),x(s)) is the similarity in
the position s = (u, v) between memory cell x and the predicted x by its dynamic.
The prediction for the next position of the ROI of the feature is based on the
position of the best cell and its velocity, and is calculate as «*+! = u^{ + Vu and
Vk+1 = vj^Jf + V" where V" and Vv are the velocities of the the coordinates u and
v respectively. The affinity function for the dynamic is given by,
The next step is the somatic mutation process. This is a mechanism inside cells
that is part of the way the immune system adapts to the new foreign elements that
confront it. This variations allow to prepare the B-cells and enhanced the ability
to recognize and bind a specific antigen. The equation (3.28) introduce the random
mutation factor a, where {c*|0 < a < 0.3}.
The parameters for the next memory cells, feature variants, are changed accord
ing to a random mutation of the best matched antigen and their own parameters.
This is, we choose the parameter of the antigen Y on the position of the best cell
x)*st{s), to update the parameter of the each cell x\ However, we left one of the
memory cells always as the original B-cell in order to keep the reference of the
original feature. Therefore, the variations of the B-cell search for rotation, scaling
and perspective changes without the B-cell loosing track of the original feature.
Figure 3.14 shows the somatic mutation for a B-cell with histogram representation,
(a) and (d) represent the original and do not change but (e) changes according to
(c) and (b).
f {x{s ) , x(s)) = exp{ - \ \ x - x||). (3.27)
4+i = a 4 + (1 - a) ^(^(s)) (3.28)
47
M 11 u m**—
ll li ill
Jill Figure 3.14: Somatic mutation of the cells for histogram representation
To balance the effect of the variations among cells, weights w l are introduced
in the total the affinity equation 3.22. This is, the weights helps to take a decision
between variations with similar affinity function. The weight calculation is given
by, n. .( \
(3.29) wk+1 -
9 ( - ) = (3.30)
EfEf *»(•)' where g( . ) is defined as
*
1 if f ( x ) > e
0 if f(x) < e,
and e is a threshold normally larger than 0.6. The weight is higher for the cell that
better match the antigen and therefore there is larger probability that the next
antigen is close to that cell.
A second exposure to the agent usually calls for more rapid and larger response
to the antigen. This is called the secondary response. The secondary response
reflects a larger number of antigen-specific cells than existed before the primary
response, therefore we obtain an improvement in our tracking.
48
3.4.2 Experiments
3.4.2.1 Comparison Between Template and Histogram as B-cells
In this section, we evaluate the AIS feature extraction module using two different
representations of object features: template and histogram. We compare the po
sitional accuracy of the AIS feature extraction module for each representation by
varying the translation and rotation of the object being tracked.
The 2D objects to track are shown in Figure 3.15. Object (a) is a simple
synthetic image created by paint. Object (b) was extracted from a picture and
represents a 2D object in a real situation.
a) b)
Figure 3.15: 2D Objects as data driven object tracking: a) Synthetic B) Real
The experiment consists of tracking a 2D object following a path represented
by the equation
v = 0.0056u2 - 3.55ti + 690 (3.31)
with the initial location of (u , v ) = (90,415). In each experiment, just one object is
tracked at one time. During the translation, the rotation is varied discontinuously
by 25 degrees per 80 pixel of u-translation.
Figure 3.16 shows the performance of the two representations for one trial, and
Figure 3.17 shows the corresponding images for the case of template representation.
It can be seen from Figure 3.16 that the template representation provides better
accuracy than does the histogram.
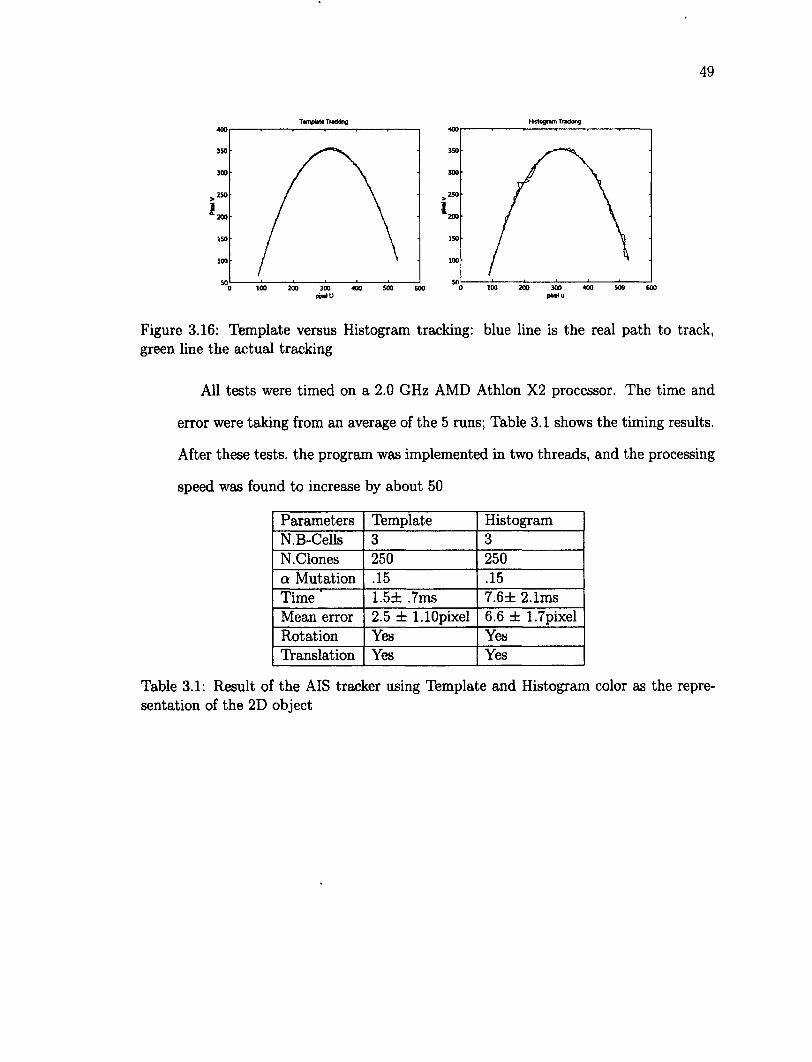
49
Tamplata Traddng Histogram Trading 400
350 350
300 300
250 2S0
200 200
ISO 150
100 100
500 100 200 300 poori u
400 600 100 200 500 400 600
Figure 3.16: Template versus Histogram tracking: blue line is the real path to track, green line the actual tracking
All tests were timed on a 2.0 GHz AMD Athlon X2 processor. The time and
error were taking from an average of the 5 runs; Table 3.1 shows the timing results.
After these tests, the program was implemented in two threads, and the processing
speed was found to increase by about 50
Parameters Template Histogram N.B-Cells 3 3 N. Clones 250 250 a Mutation .15 .15 Time 1.5± .7ms 7.6± 2.1ms Mean error 2.5 ± l.lOpixel 6.6 ± 1.7pixel Rotation Yes Yes Translation Yes Yes
Table 3.1: Result of the AIS tracker using Template and Histogram color as the representation of the 2D object
Figure 3.17: Snapshots from the experiment using a template representation of the object: Blue square is the initial condition, Red square is the result of the AIS tracker
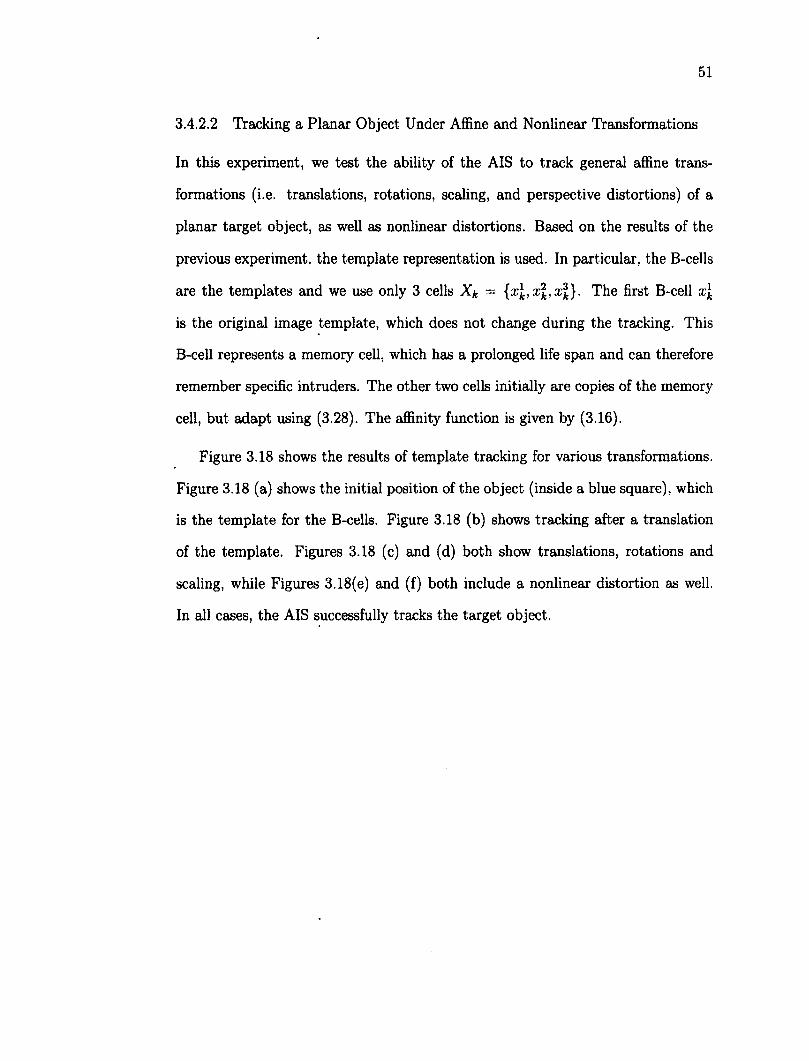
51
3.4.2.2 Tracking a Planar Object Under Affine and Nonlinear Transformations
In this experiment, we test the ability of the AIS to track general affine trans
formations (i.e. translations, rotations, scaling, and perspective distortions) of a
planar target object, as well as nonlinear distortions. Based on the results of the
previous experiment, the template representation is used. In particular, the B-cells
are the templates and we use only 3 cells Xk = {z£, x2k, x|}. The first B-cell x|
is the original image template, which does not change during the tracking. This
B-cell represents a memory cell, which has a prolonged life span and can therefore
remember specific intruders. The other two cells initially are copies of the memory
cell, but adapt using (3.28). The affinity function is given by (3.16).
Figure 3.18 shows the results of template tracking for various transformations.
Figure 3.18 (a) shows the initial position of the object (inside a blue square), which
is the template for the B-cells. Figure 3.18 (b) shows tracking after a translation
of the template. Figures 3.18 (c) and (d) both show translations, rotations and
scaling, while Figures 3.18(e) and (f) both include a nonlinear distortion as well.
In all cases, the AIS successfully tracks the target object.
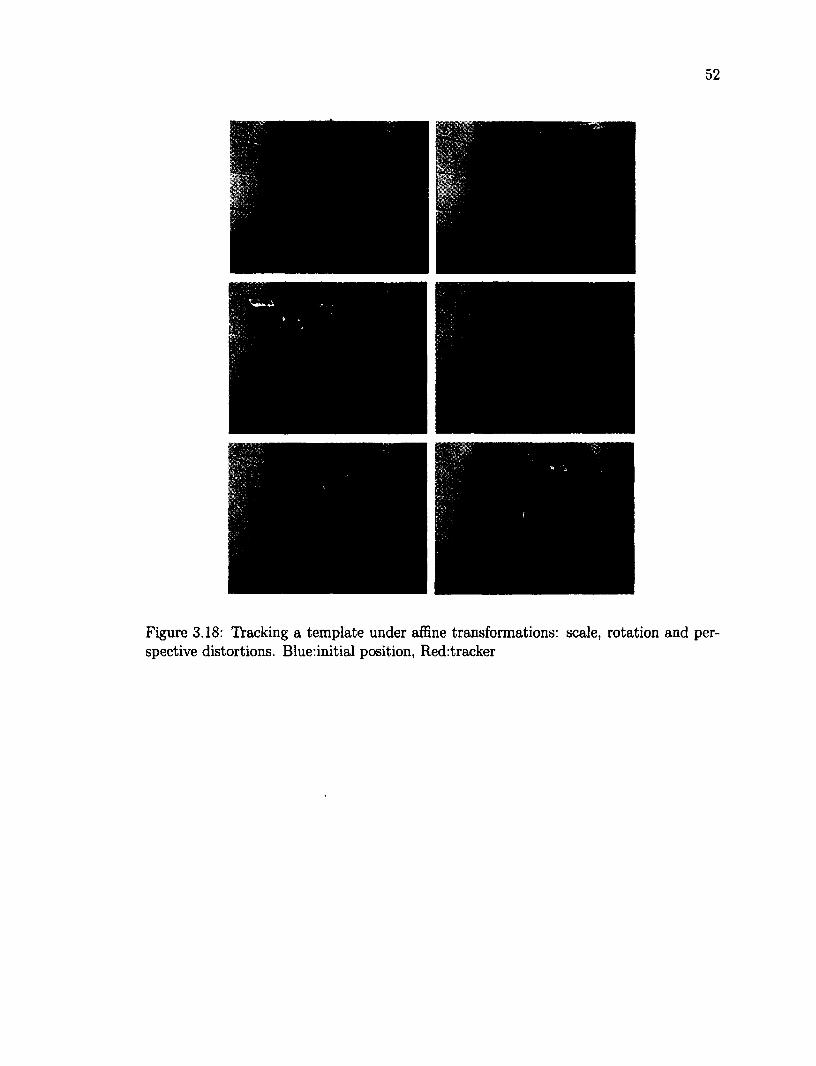
Figure 3.18: Tracking a template under affine transformations spective distortions. Blue:initial position, Red:tracker
scale, rotation and per-
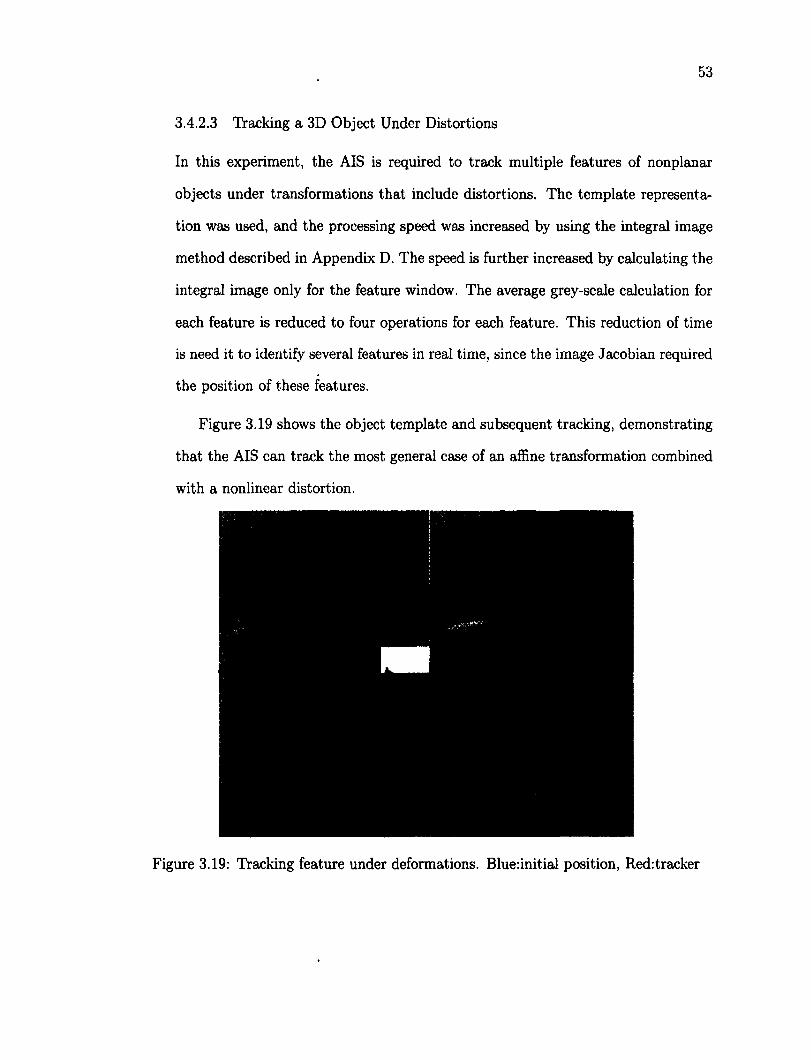
53
3.4.2.3 Tracking a 3D Object Under Distortions
In this experiment, the AIS is required to track multiple features of nonplanar
objects under transformations that include distortions. The template representa
tion was used, and the processing speed was increased by using the integral image
method described in Appendix D. The speed is further increased by calculating the
integral image only for the feature window. The average grey-scale calculation for
each feature is reduced to four operations for each feature. This reduction of time
is need it to identify several features in real time, since the image Jacobian required
the position of these features.
Figure 3.19 shows the object template and subsequent tracking, demonstrating
that the AIS can track the most general case of an affine transformation combined
with a nonlinear distortion.
Figure 3.19: Tracking feature under deformations. Blue:initial position, Red:tracker
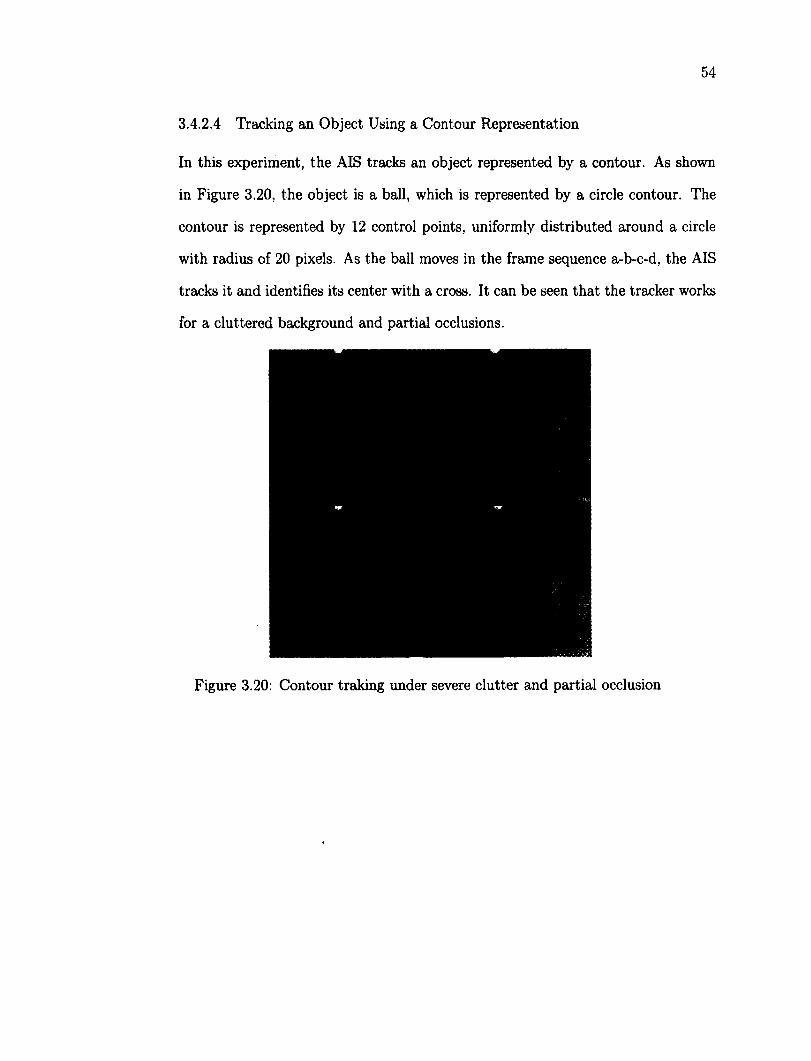
54
3.4.2.4 Tracking an Object Using a Contour Representation
In this experiment, the AIS tracks an object represented by a contour. As shown
in Figure 3.20, the object is a ball, which is represented by a circle contour. The
contour is represented by 12 control points, uniformly distributed around a circle
with radius of 20 pixels. As the ball moves in the frame sequence a-b-c-d, the AIS
tracks it and identifies its center with a cross. It can be seen that the tracker works
for a cluttered background and partial occlusions.
Figure 3.20: Contour traking under severe clutter and partial occlusion
55
3.5 Summary
In this chapter, we presented the some state-of-the-art algorithms for object track
ing and introduced a new framework based on Artificial Immune Systems (AIS)
to meet the needs of our visual servoing system. We evaluated the performance of
the AIS using histogram and template object representations, and found that the
template representation provided the best accuracy and processing speed. Con
sequently, the template representation will be used in the visual servo sytem of
Chapter 5.
The experiments showed that the AIS is capable of tracking objects under affine
transformation and nonlinear distortions and can track multiple features in real
time. Finally, to show the flexibility of the AIS, we also implemented it using
contour representations.
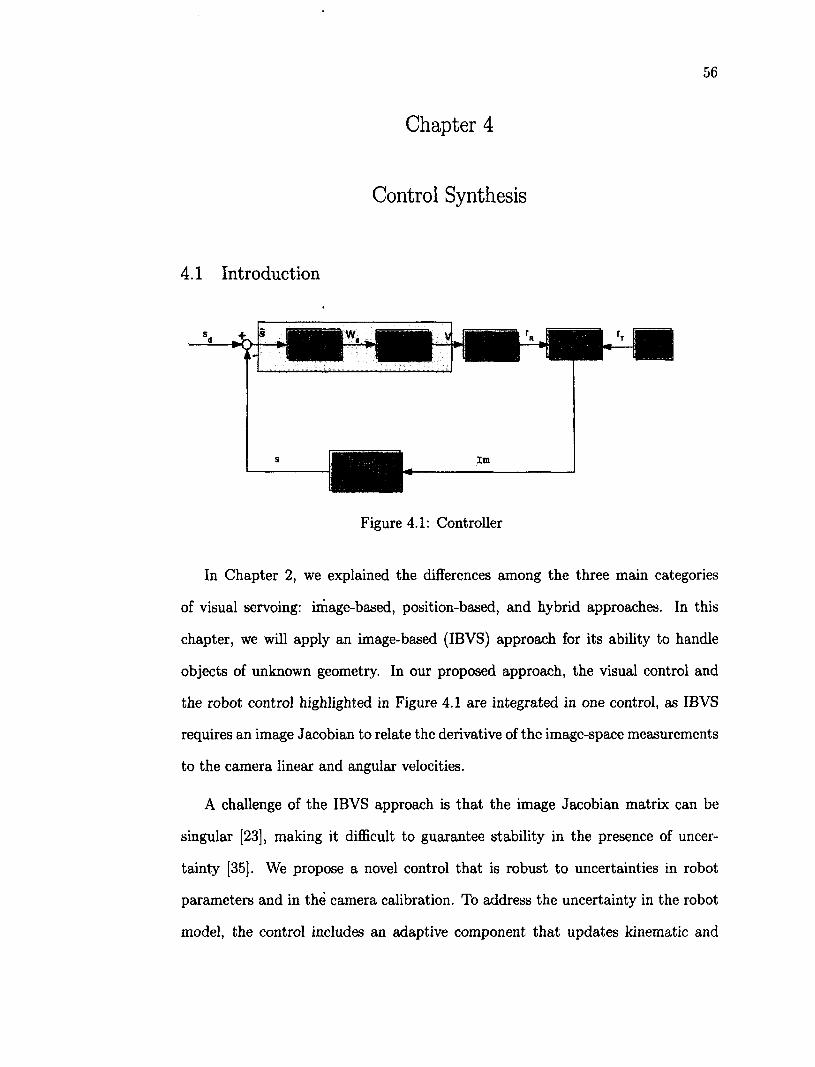
Chapter 4
56
Control Synthesis
4.1 Introduction
Figure 4.1: Controller
In Chapter 2, we explained the differences among the three main categories
of visual servoing: image-based, position-based, and hybrid approaches. In this
chapter, we will apply an image-based (IBVS) approach for its ability to handle
objects of unknown geometry. In our proposed approach, the visual control and
the robot control highlighted in Figure 4.1 are integrated in one control, as IBVS
requires an image Jacobian to relate the derivative of the image-space measurements
to the camera linear and angular velocities.
A challenge of the IBVS approach is that the image Jacobian matrix can be
singular [23], making it difficult to guarantee stability in the presence of uncer
tainty [35]. We propose a novel control that is robust to uncertainties in robot
parameters and in the camera calibration. To address the uncertainty in the robot
model, the control includes an adaptive component that updates kinematic and
57
dynamic parameters. Robustness to uncertainty in the camera calibration is ad
dressed by including in the control an error bound on the system Jacobian (which
is a combination of the robot and image Jacobians).
Stability of the proposed control is proved via Lasalle's invariant principle. Sim
ulations are used to test the control before it is applied on a real robotic system in
Chapter 5.
4.2 Dynamics of Mechanical Systems
The Euler-Lagrange (EL) equations of motion are defined as
ddL 91 _ ( A U d t dq 8q T ' ^ *
where q € is the vector of joint displacements, r € is a vector of generalized
forces, and L is the Lagrangian. When applied to a robot arm, this equation gives
H{q)q + C(q ,q )q + G(q) = r, (4.2)
where H(q) € 3?nxn is a symmetric positive definite inertia matrix, C(q , q )q is a
vector of centripetal and Coriolis torques and G(q) £ is a vector of gravitational
torques, and r is a vector of joint torques.
The robot dynamic model (4.2) has the following properties [40]:
— Property 1. The dynamic equations may be expressed as a linear function of
a constant parameter vector 9 € 5?':
H(q)q + C(q , q )q + G(q) = Y{q , q , q )9 = r, (4.3)
where Y(q , q , q ) € 3fl n x l is known as the regression matrix.
58
- Property 2. The matrix H(q) - 2C(q , q ) is skew-symmetric and satisfies
aT [&{<!) ~ 2C{q , 9)J a = 0, (4.4)
for Va € 5Rn.
- Property 3. The matrix H(q) is symmetric and positive definite.
4.3 Definition of image Jacobian matrix
In Chapter 2, the image Jacobian matrix Jim is defined in (2.2) as a linear trans
formation from the tangent space of T at r to the tangent space of S at s. Thus,
the image Jacobian determines how image features change with respect to changing
manipulator pose. The dimension of Jim depends on the dimension m of the task
space T and the number of features k:
Jirn — ds
dr
&8\ dr\
dri
d8\
dsk drm
(4.5)
Since in visual servoing we are interested in determining the manipulator velocity
requ i red to ach ieve some des i red f ea tu re ve loc i ty , we mus t so lve (2 .2 ) fo r r .
To compute Jim, let P be a point rigidly attached to the end-effector. Then the
velocity of the point P relative to the camera frame is given by
(4.6) p = v + HxP,
is a skew matrix, and is defined as
0 ~UZ UJy
Mx = £ 0
1 £
i i £
£ O
i
(4.7)
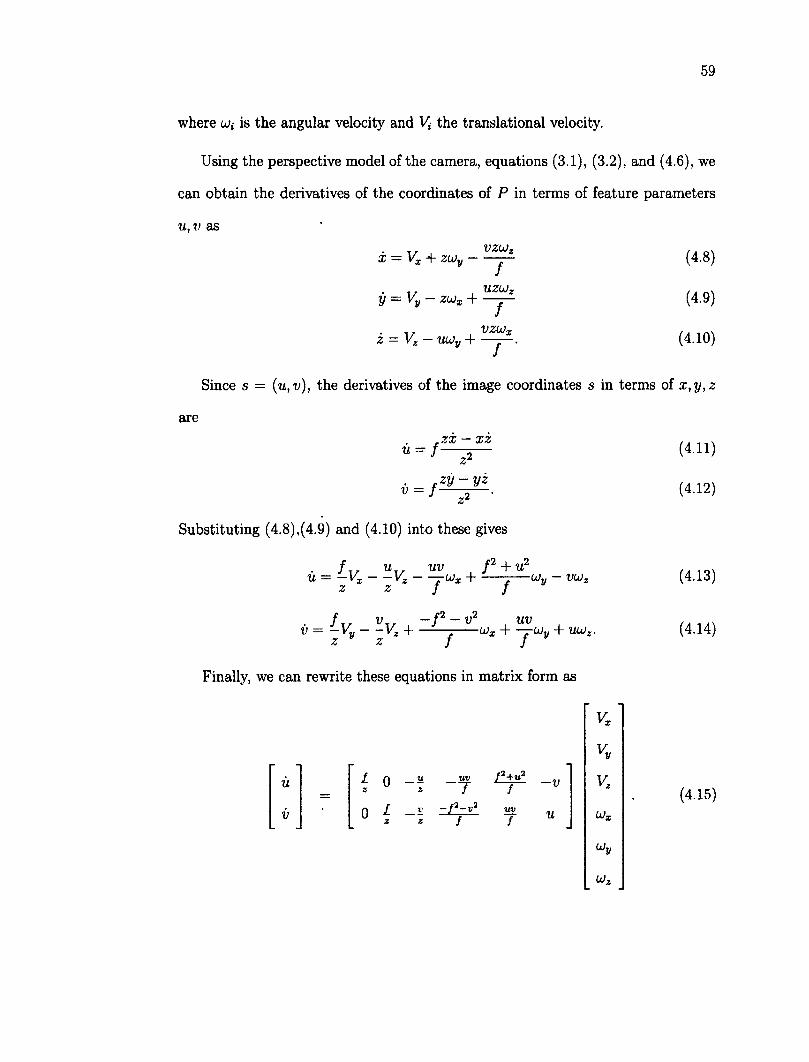
59
where u/j is the angular velocity and the translational velocity.
Using the perspective model of the camera, equations (3.1), (3.2), and (4.6), we
can obtain the derivatives of the coordinates of P in terms of feature parameters
u, v as
x = VX + zu.
y = V y - zu x +
i = Vg - UUJy +
VZU)z
V ~ ~ T UZU)z
~T vzux
(4.8)
(4.9)
(4.10)
Since s = (u ,v ), the derivatives of the image coordinates s in terms of x , y , z
are
« = / zx — x z
z y - y z v = f z2 •
Substituting (4.8),(4.9) and (4.10) into these gives
/ u uv f 2 4- u 2
u = -Vx - -Vz —t u x + 1—-—ojy - vojz u , , uv
7 U * ' f
2 „,2 f r r V T r — f 2 — V 2 U V V — —Vy Vz -\ U)x H
Z " Z f J
Finally, we can rewrite these equations in matrix form as
ii
V
* 0 z
0 I
u z
lit;
/
f UV
f u
V x
Vy
V z
Wz
Uy
Uz
(4.11)
(4.12)
(4.13)
(4.14)
(4.15)

60
Similaxly, the image Jacobian for the a fixed camera in the end-effector can be
calculated and it is given by;
u
V
1 N
0 u z
uv f
-/2-u2
/
0 _z z
V
z f2+v2
f uv f
v
—u
V c X
V v
Kc
oj:
U)' \
U>'
(4.16)
where [Vc, wc] is the linear and angular velocity of the camera.
The matrix in 4.15 and 4.16 are the image Jacobian for one feature point. The
complete image Jacobian for k image features is:
Jim
Jim\
J j' 11712
'% mk
(4.17)
Then J°m and J f m are the image Jacobian due to the object motion and the camera
motion respectively.
Remark 1: In (4.15) the depth information z* is required for each image feature.
Therefore, either we do a pose estimation of the object or we can just use zj , which
is the desired depth of the feature points at the desired position. Besides ziy the
camera focal length parameter is required.
Remark 2 \ In addition to the uncertainties in the parameters of the image Ja
cobian, a coarse camera calibration affect the performance of the control law. This
is because extrinsic camera parameters represent a mapping between the reference
frame and the camera frame.
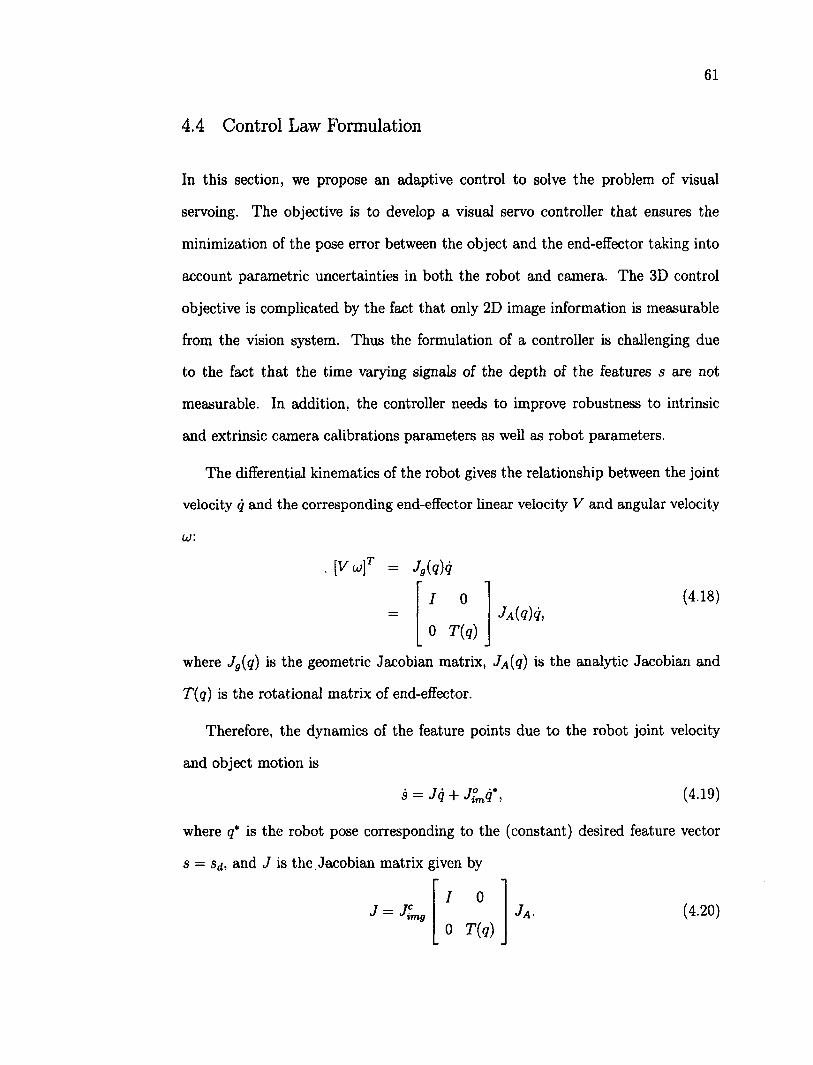
61
4.4 Control Law Formulation
In this section, we propose an adaptive control to solve the problem of visual
servoing. The objective is to develop a visual servo controller that ensures the
minimization of the pose error between the object and the end-effector taking into
account parametric uncertainties in both the robot and camera. The 3D control
objective is complicated by the fact that only 2D image information is measurable
from the vision system. Thus the formulation of a controller is challenging due
to the fact that the time varying signals of the depth of the features s are not
measurable. In addition, the controller needs to improve robustness to intrinsic
and extrinsic camera calibrations parameters as well as robot parameters.
The differential kinematics of the robot gives the relationship between the joint
velocity q and the corresponding end-effector linear velocity V and angular velocity
w:
where J g ( q ) is the geometric Jacobian matrix, J A{<I) is the analytic Jacobian and
T(q) is the rotational matrix of end-effector.
Therefore, the dynamics of the feature points due to the robot joint velocity
and object motion is
where q* is the robot pose corresponding to the (constant) desired feature vector
s = Sd, and J is the Jacobian matrix given by
. \Vu)T = J,(q)g
I 0
0 T(q) J A{Q)Q,
(4.18)
s = Jq + J°mq*, (4.19)
/ 0 J = J L %mg J A- (4.20)
0 T{q)

62
The image feature error is
S = S - SD- (4.21)
Similarly, the error on the joint vector is
Q = q~Qd, (4.22)
where qd is the desired joint vector. Ideally, we would like qd = q* (for zero tracking
error), but q* depends on the unknown motion of the target. However, q* is sensed
by 5, so we choose the desired joint velocity as
where K is positive definite gain matrix and J+ is the Moore-Penrose pseudo inverse
matrix defined by
The desired joint position qd is obtained by integrating (4.23) with an initial value
of <fa(0) = <7(0). This yields a smooth reference trajectory qd{t) even when the
initial error s(0) is large.
Taking the time derivative of (4.21) with Sd constant and substituting (4.19)
and (4.22) into this gives
q d = —J + Ks , (4.23)
J+ = JT(JJT)~\ (4.24)
« = JQ+JimgQ*
= J(^ + Qd) + (4.25)
Substituting (4.23) into (4.25) yields
~s = -K~s + Jq + J°mgq*. (4.26)
Lastly, we define 6 as our estimate of the parameter vector 6 , and we define the
error between them as
0 = 0 - 0 . (4.27)
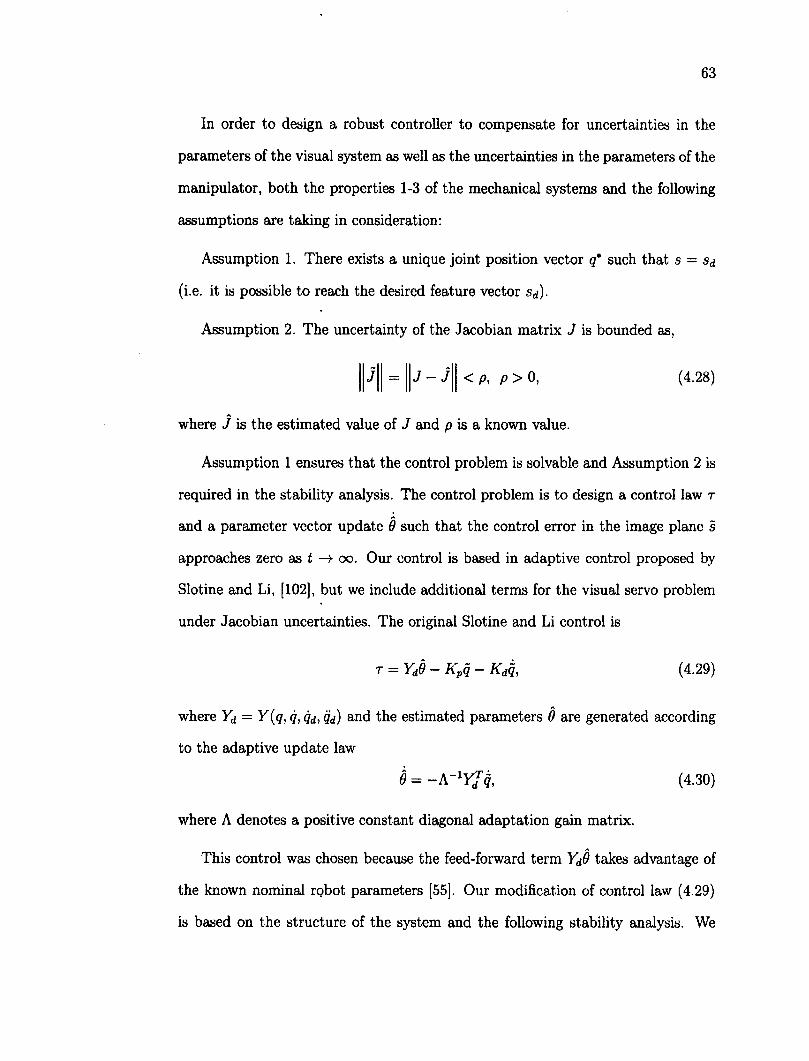
63
In order to design a robust controller to compensate for uncertainties in the
parameters of the visual system as well as the uncertainties in the parameters of the
manipulator, both the properties 1-3 of the mechanical systems and the following
assumptions are taking in consideration:
Assumption 1. There exists a unique joint position vector q* such that s = Sd
(i.e. it is possible to reach the desired feature vector Sd).
Assumption 2. The uncertainty of the Jacobian matrix J is bounded as,
J - J < P, P> 0, (4.28)
where J is the estimated value of J and p is a known value.
Assumption 1 ensures that the control problem is solvable and Assumption 2 is
required in the stability analysis. The control problem is to design a control law r
and a parameter vector update 9 such that the control error in the image plane s
approaches zero as t —> oo. Our control is based in adaptive control proposed by
Slotine and Li, [102], but we include additional terms for the visual servo problem
under Jacobian uncertainties. The original Slotine and Li control is
T = YD6- Kpq - Kdq, (4.29)
where Yd = Y(q, q, qd, ijd) and the estimated parameters 9 are generated according
to the adaptive update law
$ = (4.30)
where A denotes a positive constant diagonal adaptation gain matrix.
This control was chosen because the feed-forward term Yd9 takes advantage of
the known nominal rpbot parameters [55]. Our modification of control law (4.29)
is based on the structure of the system and the following stability analysis. We
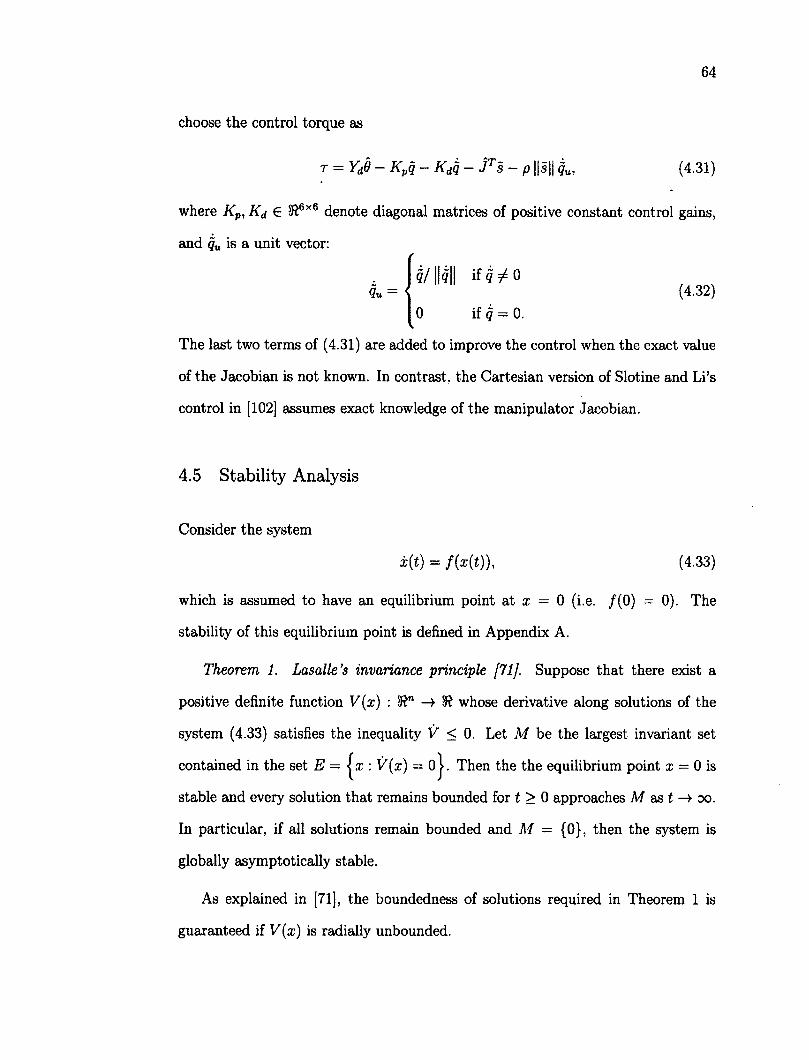
64
choose the control torque as
T = YD9 - Kpq - Kdq - JTs - p p|| qu (4.31)
Qu =
where Kp, Kd € 3?6x6 denote diagonal matrices of positive constant control gains,
and qu is a unit vector:
?/ M\ ^ 9 ^ 0 (4.32)
0 if q = 0.
The last two terms of (4.31) are added to improve the control when the exact value
of the Jacobian is not known. In contrast, the Cartesian version of Slotine and Li's
control in [102] assumes exact knowledge of the manipulator Jacobian.
4.5 Stability Analysis
Consider the system
x(t) = /(&(*)), (4.33)
which is assumed to have an equilibrium point at x = 0 (i.e. /(0) = 0). The
stability of this equilibrium point is defined in Appendix A.
Theorem 1. Lasalle's invariance principle [71}. Suppose that there exist a
positive definite function V(x) : Kn —)• 3? whose derivative along solutions of the
system (4.33) satisfies the inequality V < 0. Let M be the largest invariant set
contained in the set £? = |a:: V(z) = o|. Then the the equilibrium point x = 0 is
stable and every solution that remains bounded for t > 0 approaches M as t -> oo.
In particular, if all solutions remain bounded and M = {0}, then the system is
globally asymptotically stable.
As explained in [71], the boundedness of solutions required in Theorem 1 is
guaranteed if V (x) is radially unbounded.
65
We will use LaSalle's invariance principle to conclude stability of the origin and
asymptotic convergence of the tracking error for the case of a stationary target
object. We must first establish that the origin is an equilibrium point. Our system
corresponding to (4.33) is given by the robot(4.2), the vision system (4.19 with a
stationary target object (q* — 0), combined with our control law (4.31) and the
adaptive update law (4.30).
We choose the state as x = ( s , q , q , 6 ) T . It is easily shown that the trajectory
x(t) = 0 satisfies the above system equations if Assumption 1 holds. Hence, x = 0
is an equilibrium point.
Theorem 1 gives sufficient conditions for the stability of the system, but it
does not give instructions for determining the function V(x) with the properties
given the Theorem, therefore the task is to search for a function that satisfies the
conditions.
Theorem 2. Consider the robot and vision system given by (4.2) and (4.19), for
the case of a stationary target object (q* = 0). If the uncertainty in the Jacobian
matrix is bounded as in (4.28), then the control law (4.31) along with the adaptive
update law defined in (4.30) makes the system stable and achieves asymptotic
tracking: s —>• 0 as t -> oo.
Proof. Define the positive definite, radially unbounded function
(4.34)
The time derivative of (4.34) is
V = qTHq + ̂ qTHq + 9TA6 4- qrKpq + sTs. (4.35)
From (4.2)
Hq — T — Cq — G, (4.36)

and using (4.36) and (4.22), we may write the first term of (4.35) as
qTHq = qT (r - Cq - G - Hqd) . (4.37)
Prom Property 2, the second term of (4.35) may be written as
1 f [1(H-2C) + C],1
= fCq . (4.38)
Therefore, adding (4.37) and (4.38) and using (4.22) we have
F ( T - C q - G - H q d ) + i T C i = = f ( T - H q d - C q d - G ) . (4.39)
Prom (4.26) with q* = 0 we obtain
IPs = (-Ks + Jq)T s (4.40)
- - sT lFs + p jTs .
Substituting (4.39) and (4.40) in (4.35) and rearranging terms yields
V = F { T- Hqd - Cqd - G + K pq) + d T A § - sT K s + f j T s . (4.41)
From the control law (4.31) and (4.41), the derivative of the Lyapunov function
candidate becomes
V = qT (:Yd6 - Kji -JTs-p p|| qu) + qT {-Hqd - Cqd - G) V ' (4.42)
+6tA9 - STKS + qTJTs.
Using property 1 and (4.27) in V yields
V = qT (Yd9 - Kdq - JTs - p ||s|| qu^j + 6TA9 - sTKs 4- qTJTs. (4.43)
Substituting qrqu = ||g|| and J = J — J into (4.43) gives
V = -qTKdq + (F + Yjqj - sTKTs + qTJTs - p ||s|| ||g||. (4.44)
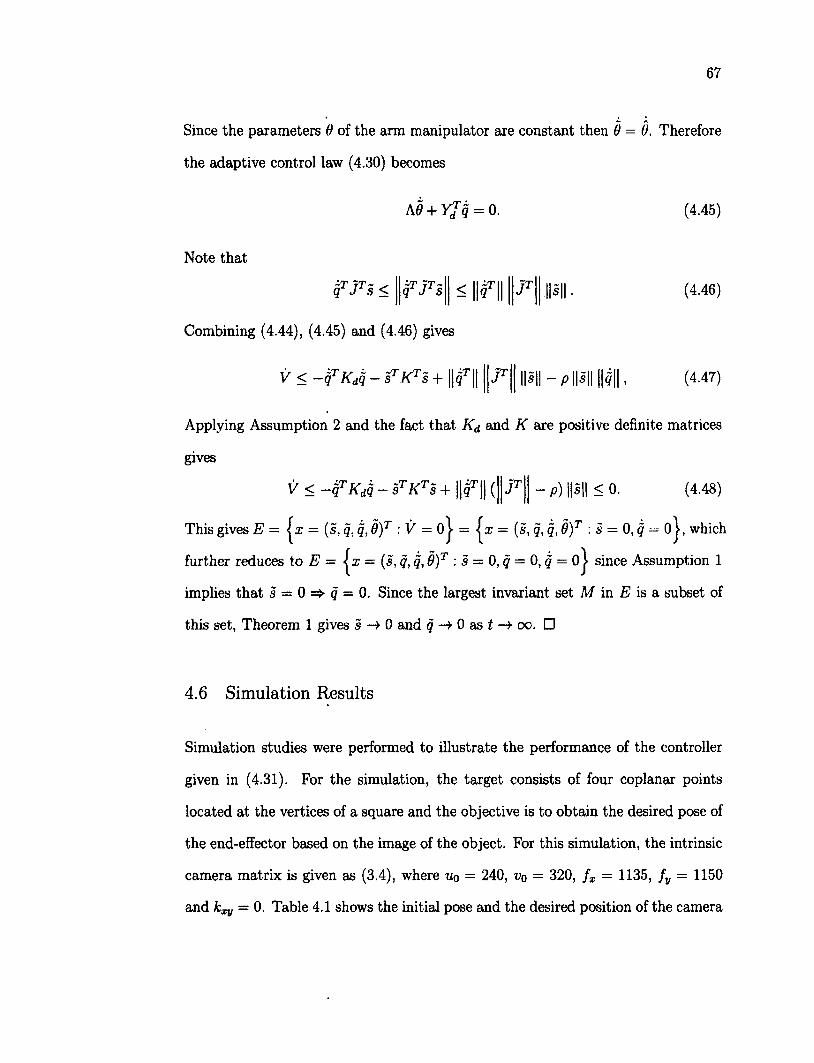
67
Since the parameters 9 of the arm manipulator are constant then 0 = 0. Therefore
the adaptive control law (4.30) becomes
A0 + Yj$ = 0.
Note that
qTjTs < fJrS ^ llf II s •
(4.45)
(4.46)
Combining (4.44), (4.45) and (4.46) gives
V < - q r K d f i - 8 1 ' K ' r 8 + \ \ q zT i sTz , I I ~T 1*1 11*11 Ml, (4.47)
Applying Assumption 2 and the fact that Kd and K are positive definite matrices
gives
V < - f K d $ - st K t s + pr|| (|| jT|| - p) p|| < 0. (4.48)
This gives E = = (s, q, q, 9)T : V = o| = = (s, q, q, 0)T : s = 0, q = o|, which
further reduces to E = = (s, q, q, 9)T : s = 0, q = 0, q = o| since Assumption 1
implies that s = 0 =>• q = 0. Since the largest invariant set M in E is a subset of
this set, Theorem 1 gives s —• 0 and q 0 as t-> oc. •
4.6 Simulation Results
Simulation studies were performed to illustrate the performance of the controller
given in (4.31). For the simulation, the target consists of four coplanar points
located at the vertices of a square and the objective is to obtain the desired pose of
the end-effector based on the image of the object. For this simulation, the intrinsic
camera matrix is given as (3.4), where u0 = 240, v0 = 320, fx = 1135, fy = 1150
and kxy = 0. Table 4.1 shows the initial pose and the desired position of the camera
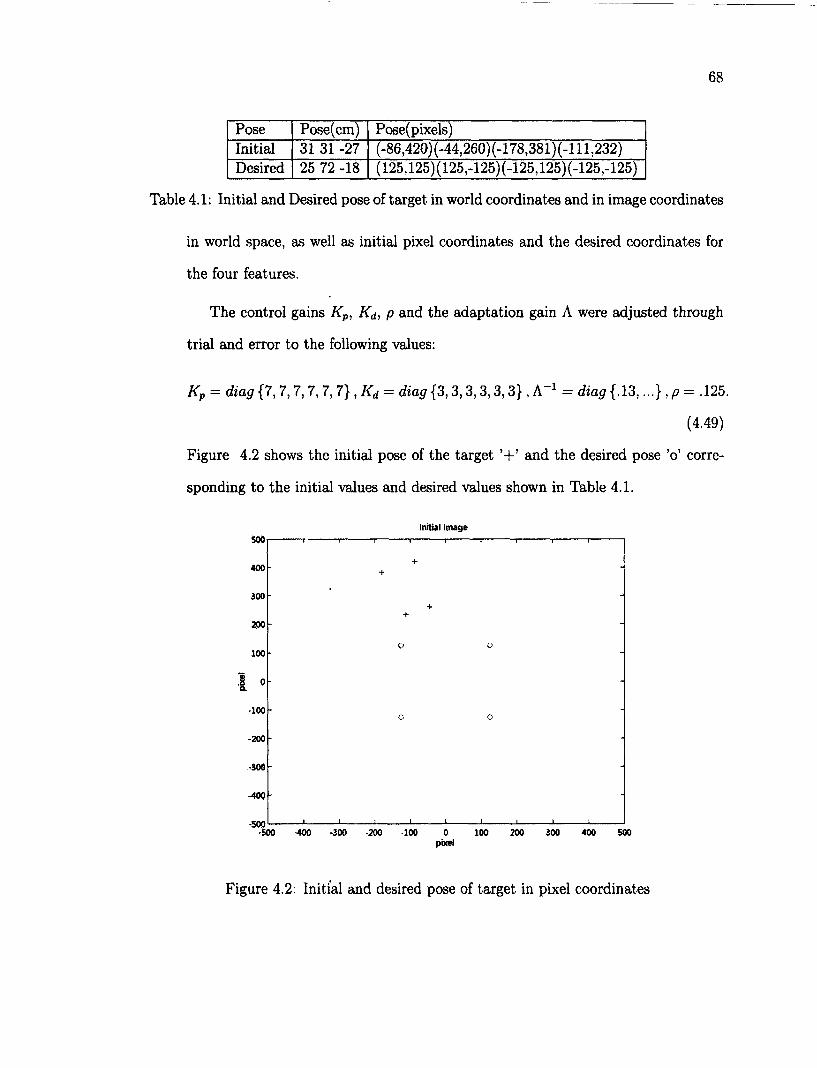
68
Pose Pose(cm) Pose(pixels) Initial 31 31 -27 (-86,420)(-44,260)(-178,381)(-l 11,232) Desired 25 72 -18 (125,125)(125,-125)(-125,125)(-125,-125)
Table 4.1: Initial and Desired pose of target in world coordinates and in image coordinates
in world space, as well as initial pixel coordinates and the desired coordinates for
the four features.
The control gains Kp, Kj., p and the adaptation gain A were adjusted through
trial and error to the following values:
Kp = diag{7,7,7,7,7,7}, K& = diag{3,3,3,3,3,3} , A-1 = diag {.13,...} ,p — .125.
(4.49)
Figure 4.2 shows the initial pose of the target and the desired pose 'o' corre
sponding to the initial values and desired values shown in Table 4.1.
500
400
300
200
100
1 0 a
-100
-200
-300
-400
-500 -500 -400 -300 -200 -100 0 100 200 300 400 500
pixel
Figure 4.2: Initial and desired pose of target in pixel coordinates
Initial Image i i 1 r-
_j i i i i i L.
69
Random variations of up to 25% in the entries in the Jacobian matrix J were
introduced to simulate uncertainties in the parameters of the robot model and
camera calibration. Figure 4.3 shows the angles of the joints as the robot moves to
the desired pose, and Figure 4.4 shows the trajectory of the end-effector in world
coordinates. Figure 4.5 shows convergence of the camera image to the desired
image, in spite of the uncertainties.
1001 1 1 1 1 r
0 5 10 15 20 25 30 time (see)
Figure 4.3: Joint angles
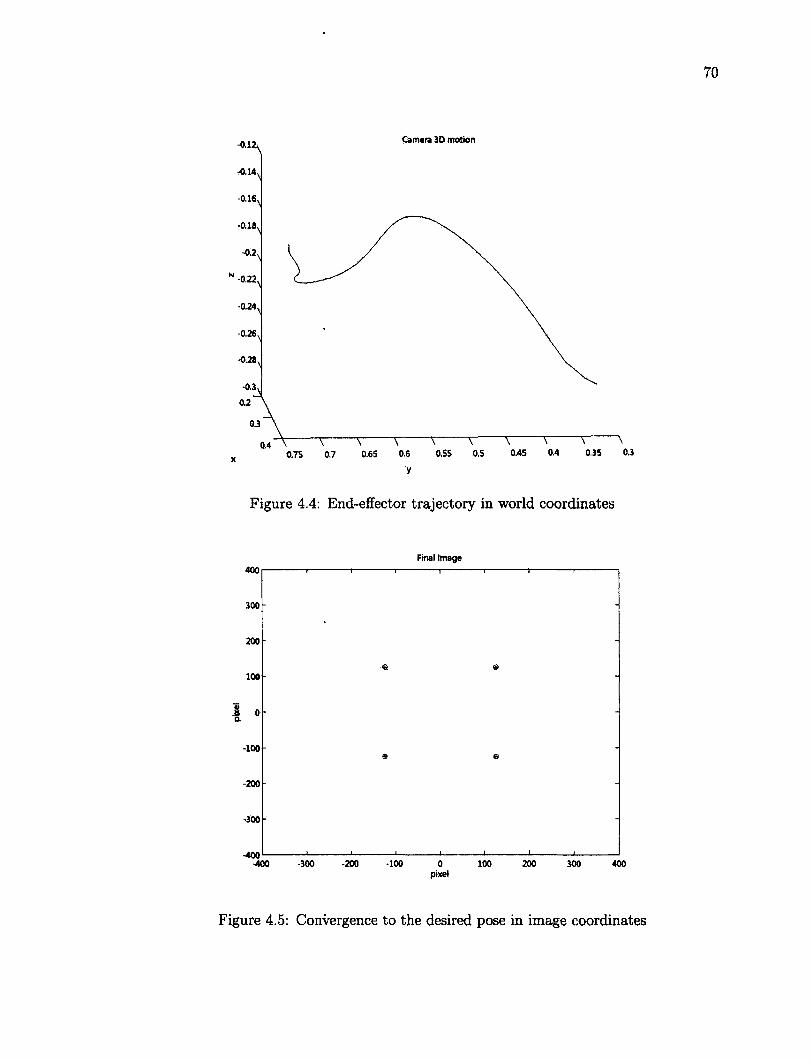
-0,12k
-0.14
-0.16.
-0.1S.
-0.2,
' -0.22,
-0.24,
-0.26,
-0.28,
Camera 3D motion
Q4 \ * * S * * * * * \ 0.75 0:7 0.65 0.6 0.55 0.5 OAS 0.4 0.35 0.3
Figure 4.4: End-effector trajectory in world coordinates
Final Image 400
400
Figure 4.5: Convergence to the desired pose in image coordinates
71
4.7 Summary and Conclusions
In this Chapter we formulated a new control based on an adaptive control proposed
by Slotine-Li. The changes made includes robustness in the visual servoing system
against parameter uncertainties in the image Jacobian. Adaptive controls use the
gradient descent to adjust the parameters of the control law. However, there are
adaptive controls based on others optimization techniques as least-squares method
[79] and conjugate gradient [103]. The parameter estimation improves the perfor
mance of the control, for situation where the values are unknown or the values are
time-varying.
Nevertheless, adaptive controls have their own problems, [98], such as instability
by parameter drifting, high gains or fast adaption on parameters. The lack of
robustness in the adaptive control law is a problem and they can be more susceptible
to disturbance than a static control law. Macnab [24] discusses the problem and
suggests that without a robust modification in the gradient descent terms, the
parameter might drift to large values. To overcome the robustness problem of the
adaptive control different techniques have been used in literature. In [80] several
techniques are described, such as e-modification, cr-modification, dead zone and
parameter projection.
Therefore, it is important to notice that the stability proof presented for our the
controller is based in the ideal case, that is, there is not presence of disturbance.
Due to this limitation, we recommend for future work to extent the control for
robustness in the adaptive term. A possible candidate is the piecewise linear cr-
modification. Since, it does not modified the ideal adaptive law if the imposed
bound holds and in the case the bound does not hold, the robust adaptive law has
the same properties as the fixed cr-modification, as mention in [80].
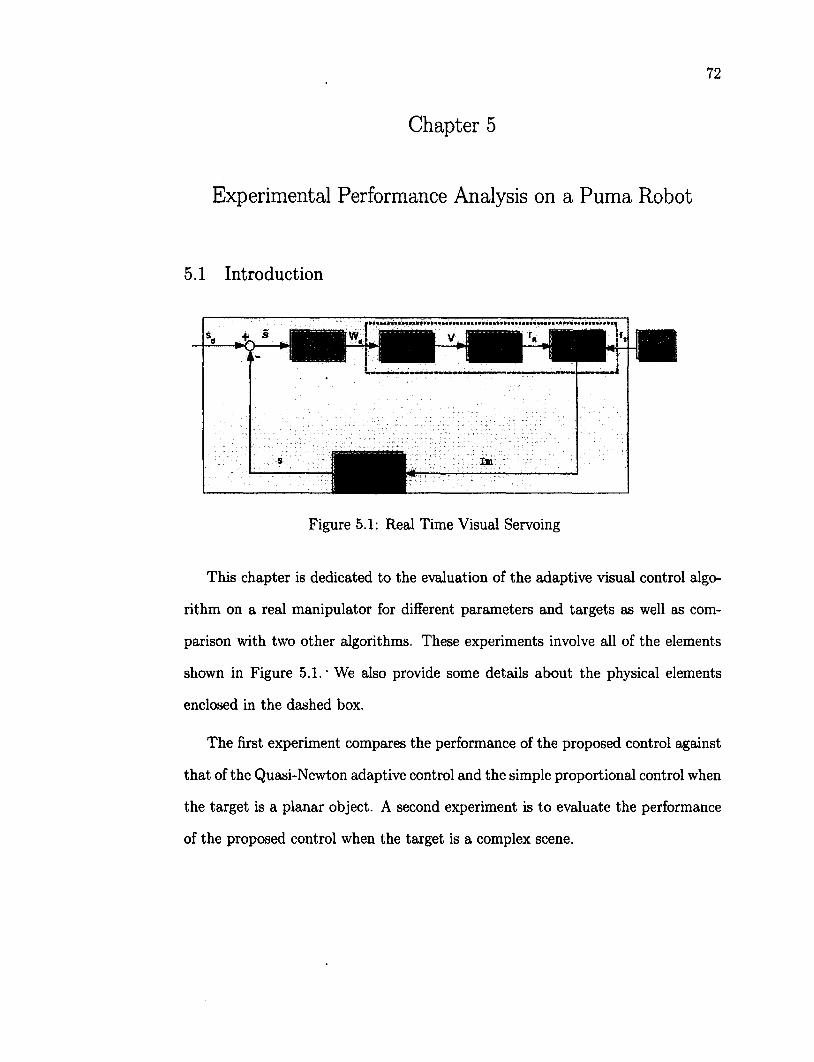
72
Chapter 5
Experimental Performance Analysis on a Puma Robot
5.1 Introduction
Figure 5.1: Real Time Visual Servoing
This chapter is dedicated to the evaluation of the adaptive visual control algo
rithm on a real manipulator for different parameters and targets as well as com
parison with two other algorithms. These experiments involve all of the elements
shown in Figure 5.1. • We also provide some details about the physical elements
enclosed in the dashed box.
The first experiment compares the performance of the proposed control against
that of the Quasi-Newton adaptive control and the simple proportional control when
the target is a planar object. A second experiment is to evaluate the performance
of the proposed control when the target is a complex scene.
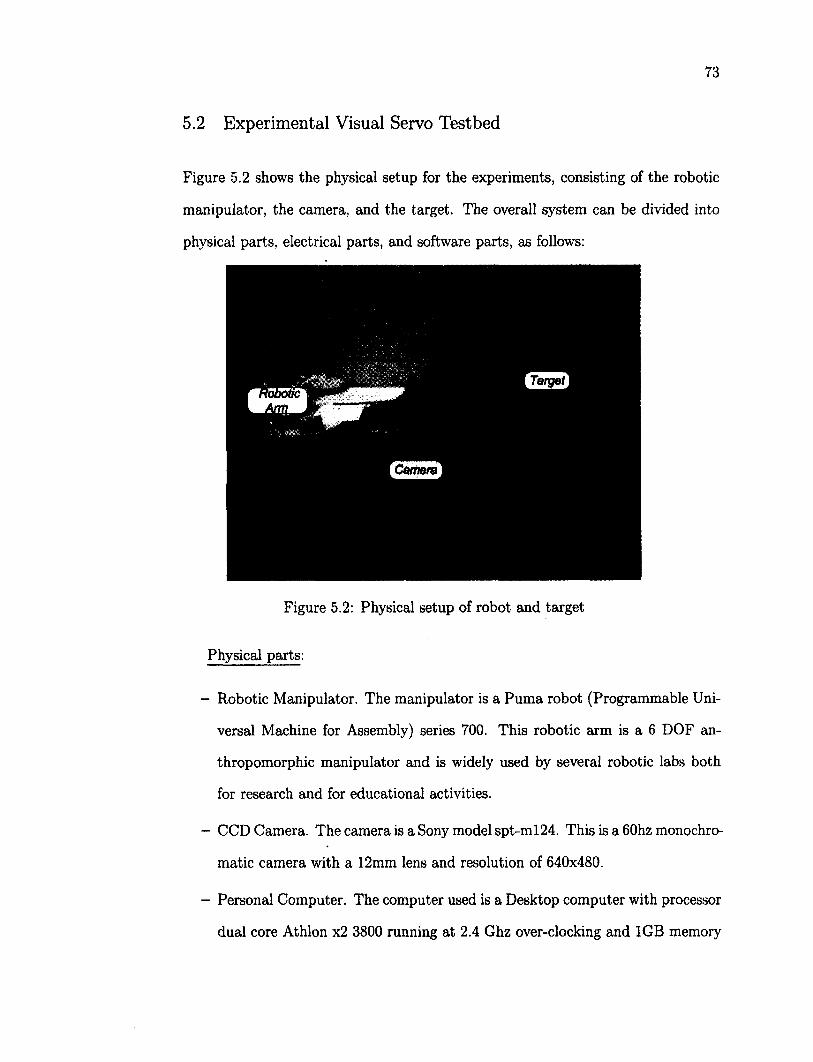
73
5.2 Experimental Visual Servo Testbed
Figure 5.2 shows the physical setup for the experiments, consisting of the robotic
manipulator, the camera, and the target. The overall system can be divided into
physical parts, electrical parts, and software parts, as follows:
Figure 5.2: Physical setup of robot and target
Physical parts:
- Robotic Manipulator. The manipulator is a Puma robot (Programmable Uni
versal Machine for Assembly) series 700. This robotic arm is a 6 DOF an
thropomorphic manipulator and is widely used by several robotic labs both
for research and for educational activities.
- CCD Camera. The camera is a Sony model spt-m 124. This is a 60hz monochro
matic camera with a 12mm lens and resolution of 640x480.
- Personal Computer. The computer used is a Desktop computer with processor
dual core Athlon x2 3800 running at 2.4 Ghz over-clocking and 1GB memory
74
ram. A multi-core processor is needed to handle parallel threads in real time
systems.
Electrical Parts:
- Robot Controller. We developed an open-architecture controller to replace
the outdated interface and control system. It consists of 6 picfl220 micro
controllers and 6 H bridges (24 volts, 8 amps) with heat-sink. The micro
controller has an internal oscillator up to 10MHZ, 10 bit A/D, and a PWM
module. This controller is documented in Appendix B, which includes a sig
nal flow diagram, circuit diagrams, and the assembler program of the robot
controller.
- Video Digitizer. The framegrabber used is a PCI Flashbus MV Pro from
Integral tech. It supports a 30 frames/second progressive scan camera and
includes a Software Developers Kit (SDK) and Dynamic Link Libary (DLL)
that provides programmable access to the features of the FlashBus MV Pro
hardware architecture.
Software Parts:
- Controller Interface. The software for the robot controller consist of a col
lection of GUI programs written in C#. The main programs are listed in
Appendix C and perform the following tasks: manipulation of the robotic
arm with mouse, path planning from a txt file, control of single links, and
visual controller. The software is designed to be as modular as possible to
facilitate future work by other students.
- Image Processing. The image processing library is written in C#, and is doc
umented in Appendix C. This library includes the main algorithms mentioned
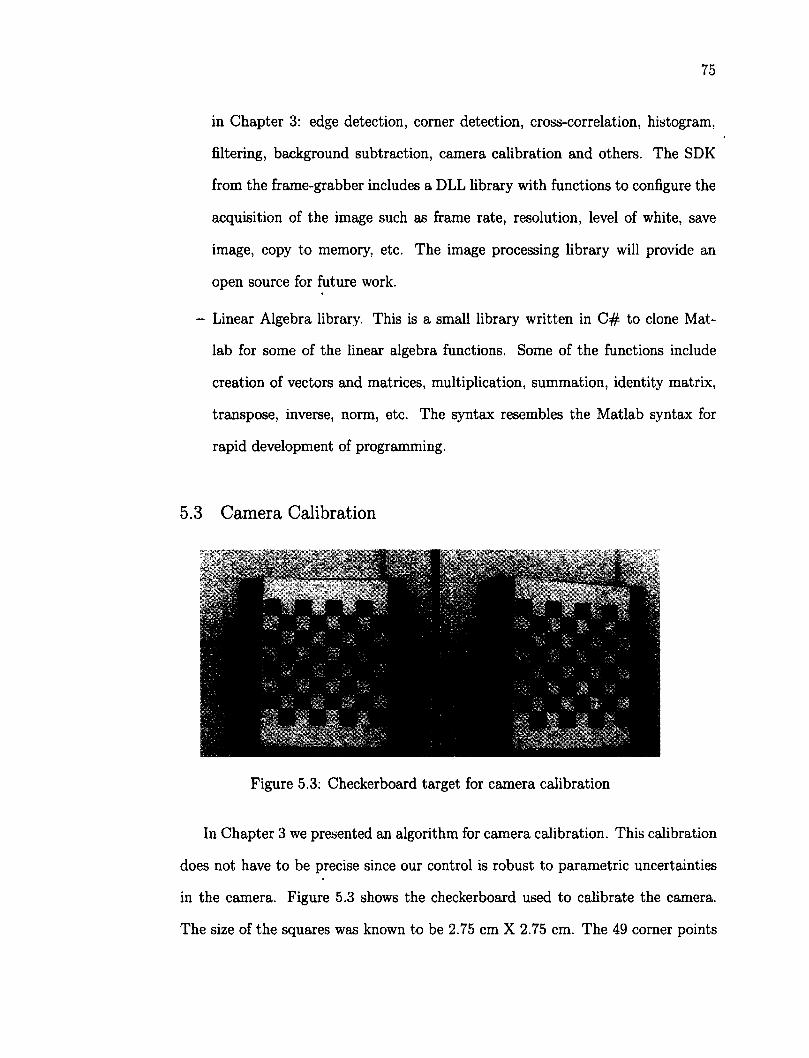
75
in Chapter 3: edge detection, corner detection, cross-correlation, histogram,
filtering, background subtraction, camera calibration and others. The SDK
from the frame-grabber includes a DLL library with functions to configure the
acquisition of the image such as frame rate, resolution, level of white, save
image, copy to memory, etc. The image processing library will provide an
open source for future work.
- Linear Algebra library. This is a small library written in C# to clone Mat-
lab for some of the linear algebra functions. Some of the functions include
creation of vectors and matrices, multiplication, summation, identity matrix,
transpose, inverse, norm, etc. The syntax resembles the Matlab syntax for
rapid development of programming.
5.3 Camera Calibration
Figure 5.3: Checkerboard target for camera calibration
In Chapter 3 we presented an algorithm for camera calibration. This calibration
does not have to be precise since our control is robust to parametric uncertainties
in the camera. Figure 5.3 shows the checkerboard used to calibrate the camera.
The size of the squares was known to be 2.75 cm X 2.75 cm. The 49 corner points
76
shown were selected by choosing the appropriate area with the mouse. Then, the
cornerdetector(xl,yl,x2,y2,vector) function in Appendix C was used to extract the
pixel coordinates of the corners. Prom this information, (3.8) was used to find the
the camera parameters as:
Focal length 1300.2312 1301.2127] mm Central Point 323.1542 241.2561] pixels skew 0.00012
Table 5.1: Intrinsic parameters after camera calibration
5.4 Open Loop Test
This test involves the. open-loop system indicated by a dotted rectangle in Figure
5.1, with the desired world coordinates as input and the image as output. A
target is positioned 90 cm in front of the robot-held camera (normal to the camera
Z-axis) and the robot is commanded to move 10 cm in the X-direction to determine
the effect on the camera image. Figure 5.4 shows the target before and after the
motion. Major gridlines indicate 5cm spacings in the X and Y directions. It can
be seen from the figure that the translation of the image is only about 9 cm. This
error is most likely due to an error in the regulation of the camera rotation about
its Y-axis. In theory, this 1 cm error would result from a Y-axis error of .64 degrees.
This experiment shows that any visual control used in Figure 5.1 must be robust
to errors in the open-loop system.
77
Figure 5.4: Open loop test
5.5 Controls Tested
5.5.1 Proportional Control
Based on (2.2), we compute a desired world velocity as
fi = -JimgkpS- (51)
Then the robot control calculated the joint torques via the PID control:
r = Kpeg + KDeg + A"/ J eq (5.2)
where KP = diag{ 10 10 10 15 15 15}, KD = dia{3 3 3 2 2 2} and A'/ =
diag{0.b 0.5 0.5 0.2 0.2 0.2}. Then, these torques are converted to joint voltages
by neglecting the inductance as
V = Kmq + RaK;\ (5.3)
where Ke = diag{0.26 0.26 0.26 0.09 0.09 0.9} V/rad, Km = Ke Nm/Amp and
Ra = diag{ 1.6 1.6 1.6 3.76 3.76 3.76} Ohms. Ke is the back EMF constant, Km is
the motor torque constant and Ra is the armature resistance, which their values are
taken from the PUMA manual. The PID gains were calculate so the controller were
critically damped, but these values in the real manipulator gave an under-damped
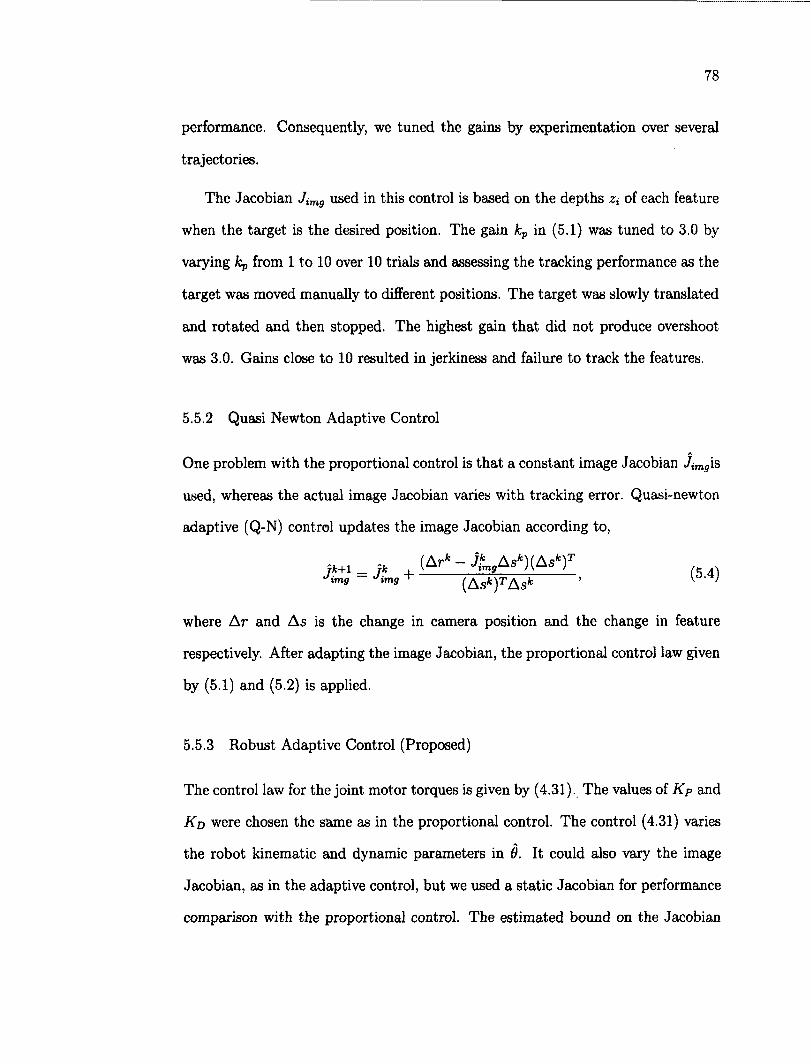
78
performance. Consequently, we tuned the gains by experimentation over several
trajectories.
The Jacobian Jimg used in this control is based on the depths Z{ of each feature
when the target is the desired position. The gain kp in (5.1) was tuned to 3.0 by
varying kp from 1 to 10 over 10 trials and assessing the tracking performance as the
target was moved manually to different positions. The target was slowly translated
and rotated and then stopped. The highest gain that did not produce overshoot
was 3.0. Gains close to 10 resulted in jerkiness and failure to track the features.
5.5.2 Quasi Newton Adaptive Control
One problem with the proportional control is that a constant image Jacobian Jimgis
used, whereas the actual image Jacobian varies with tracking error. Quasi-newton
adaptive (Q-N) control updates the image Jacobian according to.
sm _ a . (Ar" ~ JL,^sk){Ask)T
Jimg img + (As k ) T As k ' V '
where Ar and As is the change in camera position and the change in feature
respectively. After adapting the image Jacobian, the proportional control law given
by (5.1) and (5.2) is applied.
5.5.3 Robust Adaptive Control (Proposed)
The control law for the joint motor torques is given by (4.31). The values of Kp and
Kd were chosen the same as in the proportional control. The control (4.31) varies
the robot kinematic and dynamic parameters in 0. It could also vary the image
Jacobian, as in the adaptive control, but we used a static Jacobian for performance
comparison with the proportional control. The estimated bound on the Jacobian
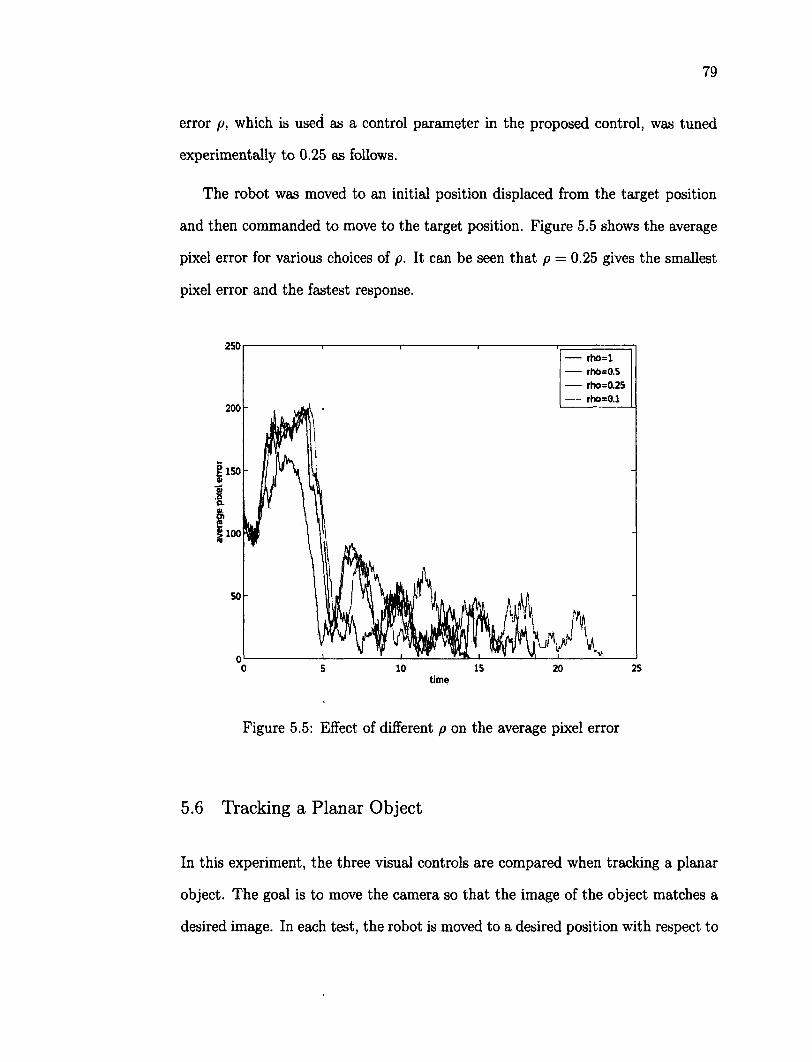
79
error p, which is used as a control parameter in the proposed control, was tuned
experimentally to 0.25 as follows.
The robot was moved to an initial position displaced from the target position
and then commanded to move to the target position. Figure 5.5 shows the average
pixel error for various choices of p. It can be seen that p = 0.25 gives the smallest
pixel error and the fastest response.
250 — rho=l
rho=0.5 — rho=0.25 — rho=0.1
200
150
15 25 0 5 10 20 time
Figure 5.5: Effect of different p on the average pixel error
5.6 Tracking a Planar Object
In this experiment, the three visual controls are compared when tracking a planar
object. The goal is to move the camera so that the image of the object matches a
desired image. In each test, the robot is moved to a desired position with respect to
80
the target, and an image is taken as reference. Then, the robot is moved to an initial
position, where the view of the target is different from that of the reference, but all
features remain within the field of view. Finally, the tested control is activated to
move the camera back to the desired position.
5.6.1 Planar Object .in 3D Translation
This experiment tests the performance of the controls when the camera is displaced
from the desired position using only translations. For this experiment, the changes
in translation with respect to the desired position are AP = [10 5 18] cm. Fig
ures 5.6 and 5.7 show the desired and initial position for the planar test. These
positions are the same for each of the three controls tested.
Figure 5.6: Desired feature positions

81
Figure 5.7: Initial feature positions
The controls performed well when a planar object and only translation was
involved. From Figure 5.7, we infer that there are uncertainties in the parameters
of the camera position or the robotic arm, since we commanded an initial position
that is only translated from the target, but the image is slightly rotated. In spite
of this calibration error, all three controls achieve the final position as shown in
Figure 5.8.
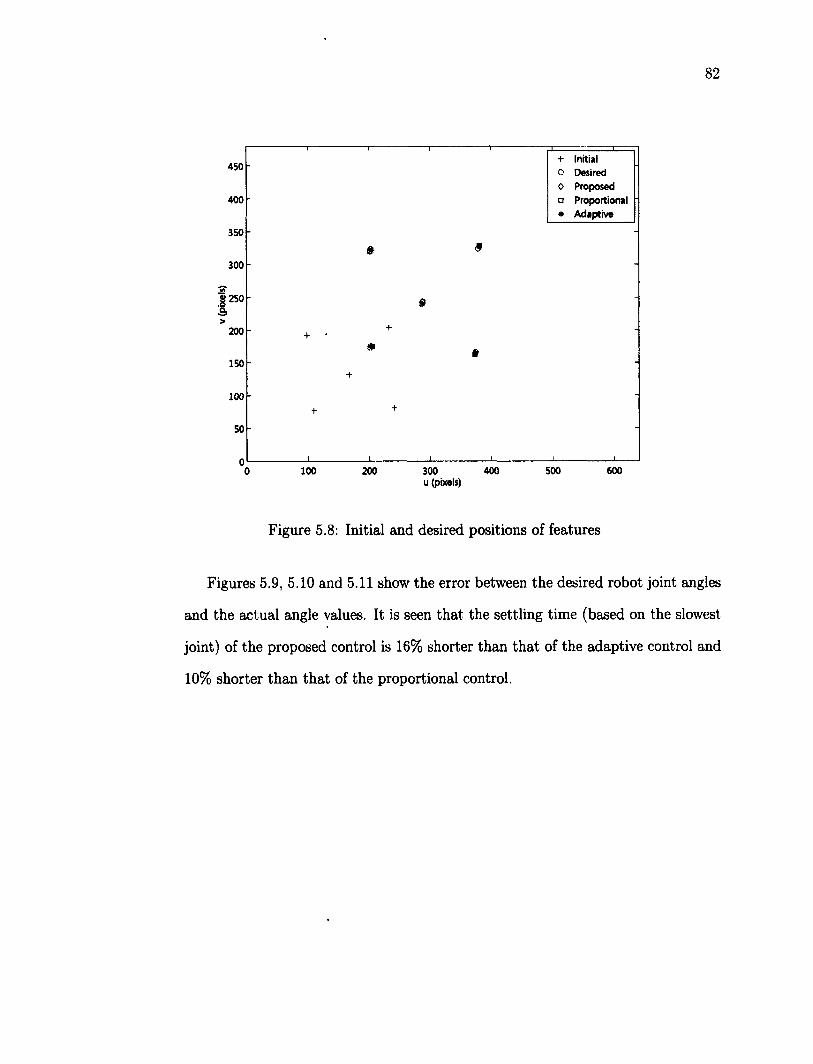
82
450
400
350
300
1250 S >
200
150
100
50
0 0 100 200 300 400 500 600
u (pixels)
Figure 5.8: Initial and desired positions of features
Figures 5.9, 5.10 and 5.11 show the error between the desired robot joint angles
and the actual angle values. It is seen that the settling time (based on the slowest
joint) of the proposed control is 16% shorter than that of the adaptive control and
10% shorter than that of the proportional control.
1 1 1 1 + Initial o Desired O Proposed
- • Proportional ' * Adaptive
& 9
$ -
+ +
• • +
+ +
i i i i
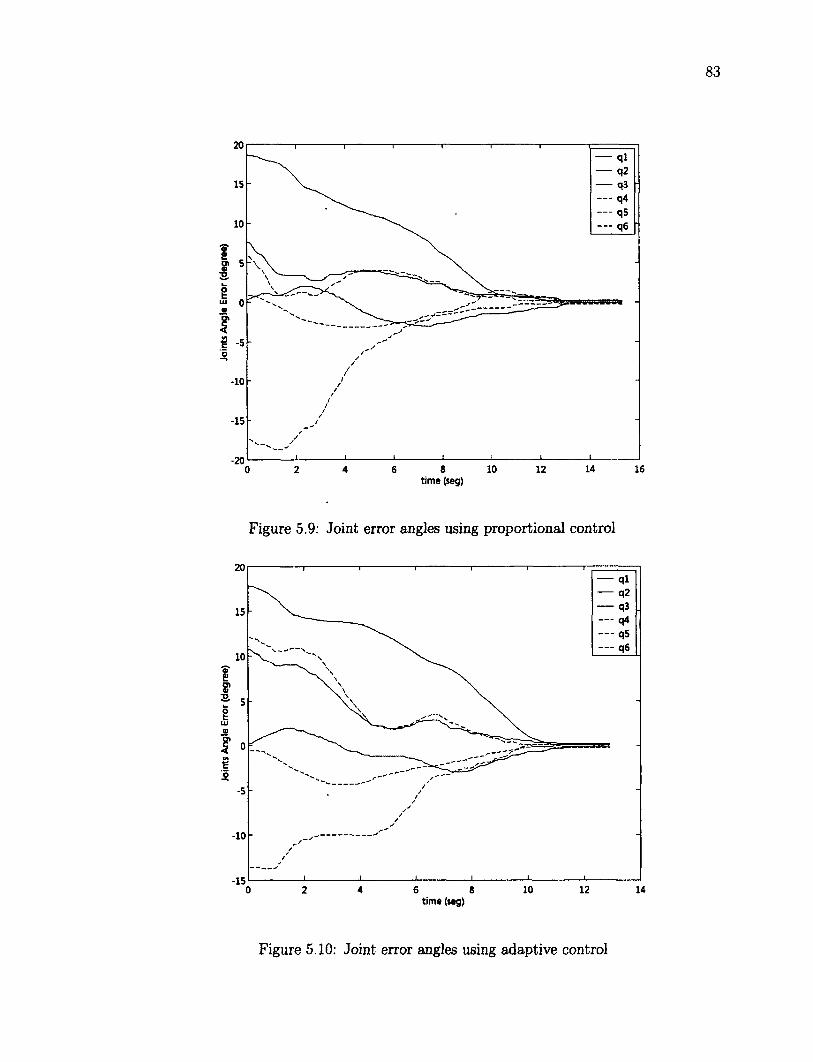
0 2 4 6 8 10 12 14 16 time (seg)
Figure 5.9: Joint error angles using proportional control
20
15 — q4
— q5 — q6
10
s 5
£ o
s
-10
-15 0 2
time (seg)
Figure 5.10: Joint error angles using adaptive control
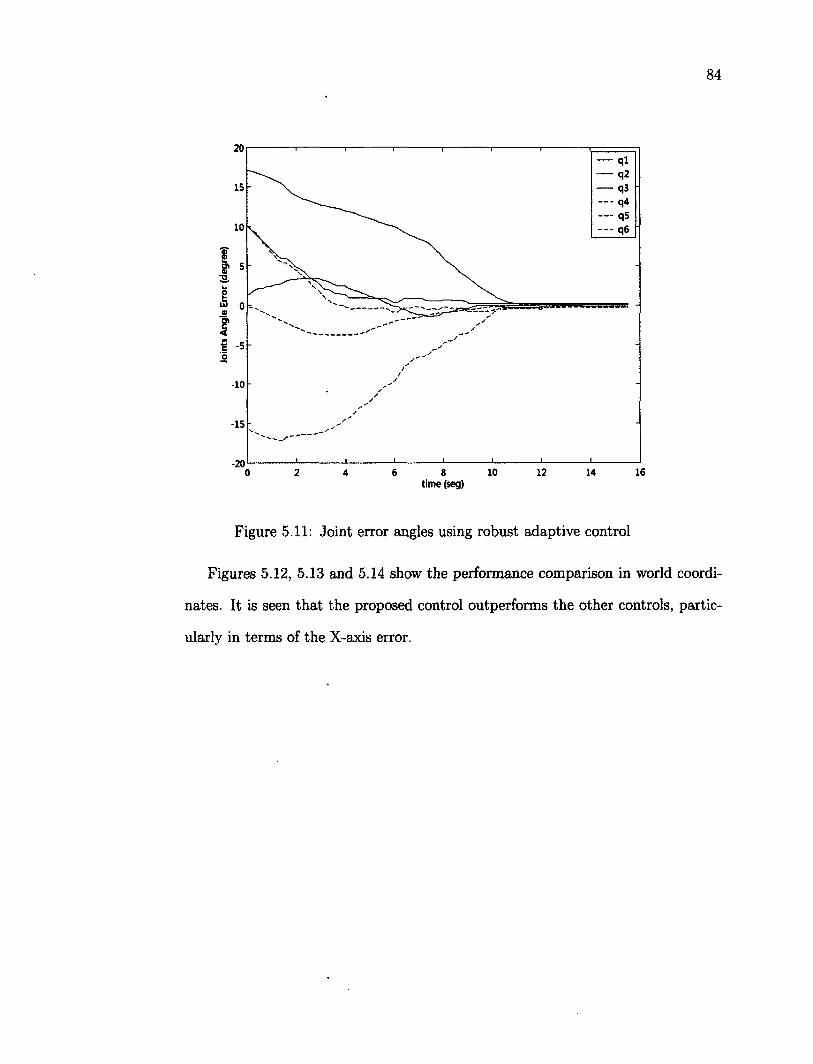
84
20 — ql
15
— q4
q5 10
5 "O
0
•5
-10
-15
-20 0
time (seg)
Figure 5.11: Joint error angles using robust adaptive control
Figures 5.12, 5.13 and 5.14 show the performance comparison in world coordi
nates. It is seen that the proposed control outperforms the other controls, partic
ularly in terms of the X-axis error.
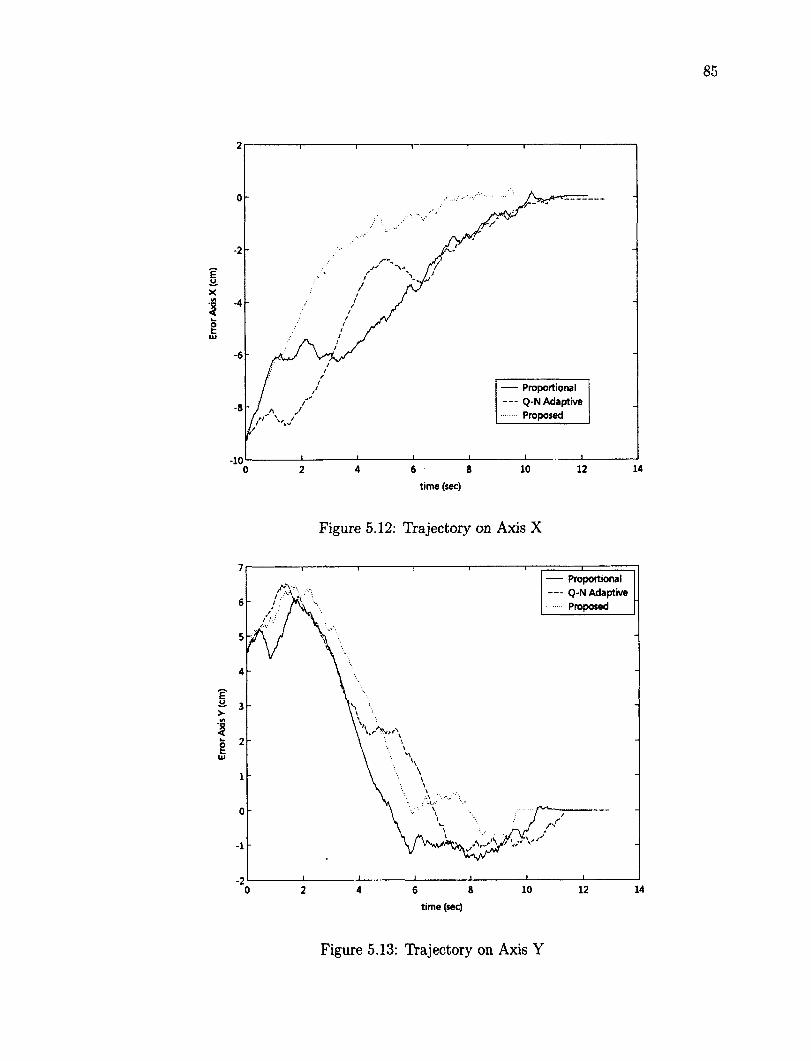
— Proportional — Q-N Adaptive
Proposed
J I L
2 4 6 8 10 12 14
time (sec)
Figure 5.12: Trajectory on Axis X
Proportional Q-N Adaptive Proposed
0 2 4 6 8 10 12 14
time (sec)
Figure 5.13: Trajectory on Axis Y
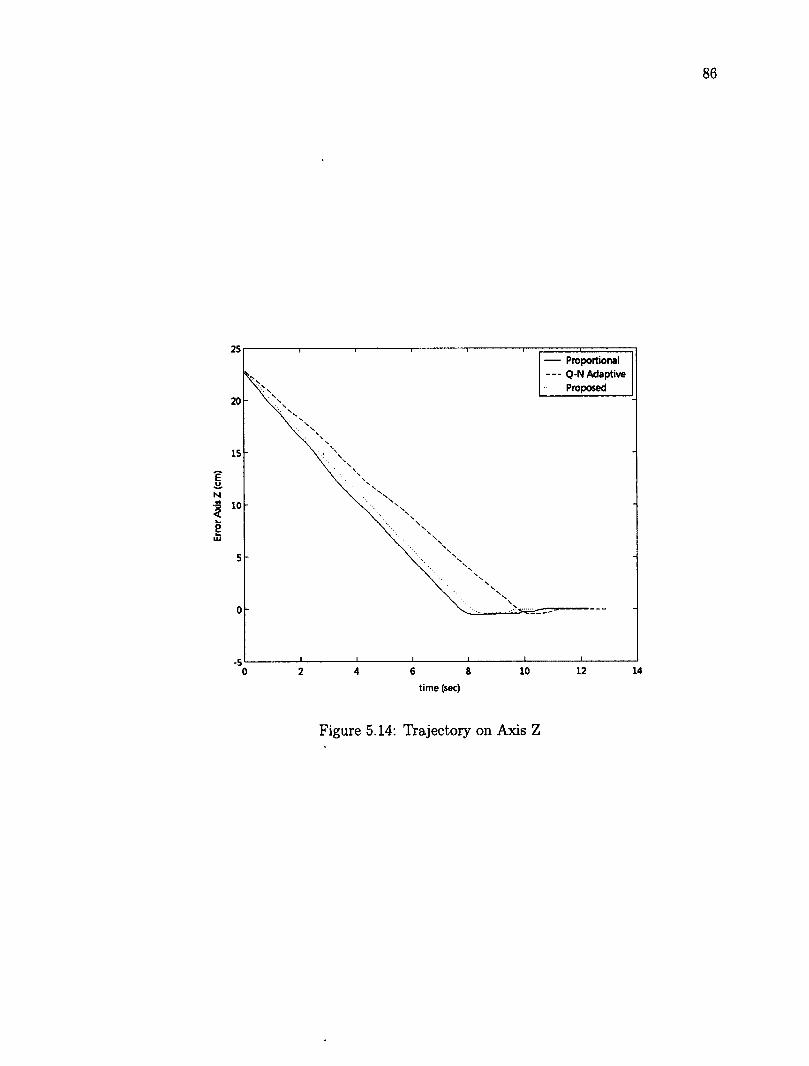
Proportional Q-N Adaptive Proposed
? «Sd> N M
I V-
g LU
time (sec)
Figure 5.14: Trajectory on Axis Z
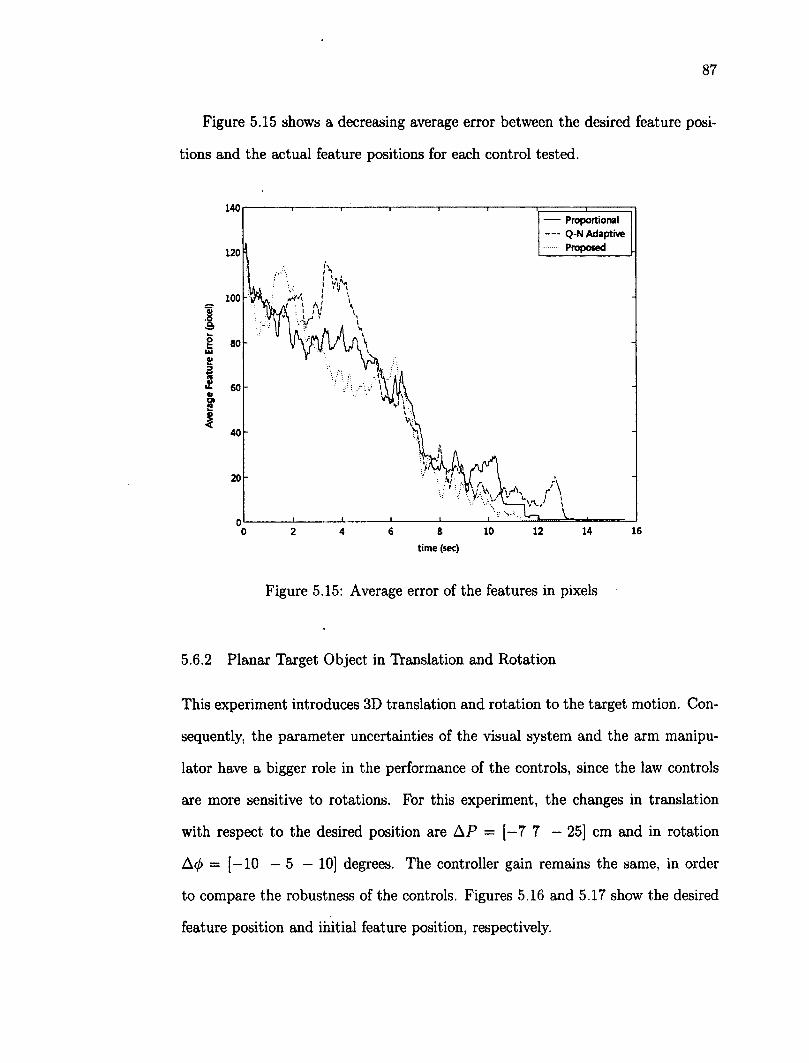
87
Figure 5.15 shows a decreasing average error between the desired feature posi
tions and the actual feature positions for each control tested.
140 — Proportional — Q-N Adaptive
Proposed 120
100
.8 & w t ui s
£ « O) 2
I
time (sec)
Figure 5.15: Average error of the features in pixels
5.6.2 Planar Target Object in Translation and Rotation
This experiment introduces 3D translation and rotation to the target motion. Con
sequently, the parameter uncertainties of the visual system and the arm manipu
lator have a bigger role in the performance of the controls, since the law controls
are more sensitive to rotations. For this experiment, the changes in translation
with respect to the desired position are AP = [—7 7 — 25] cm and in rotation
A4> = [—10 — 5 — 10] degrees. The controller gain remains the same, in order
to compare the robustness of the controls. Figures 5.16 and 5.17 show the desired
feature position and initial feature position, respectively.

Figure 5.16: Desired position of the features
Figure 5.17: Initial position of the features
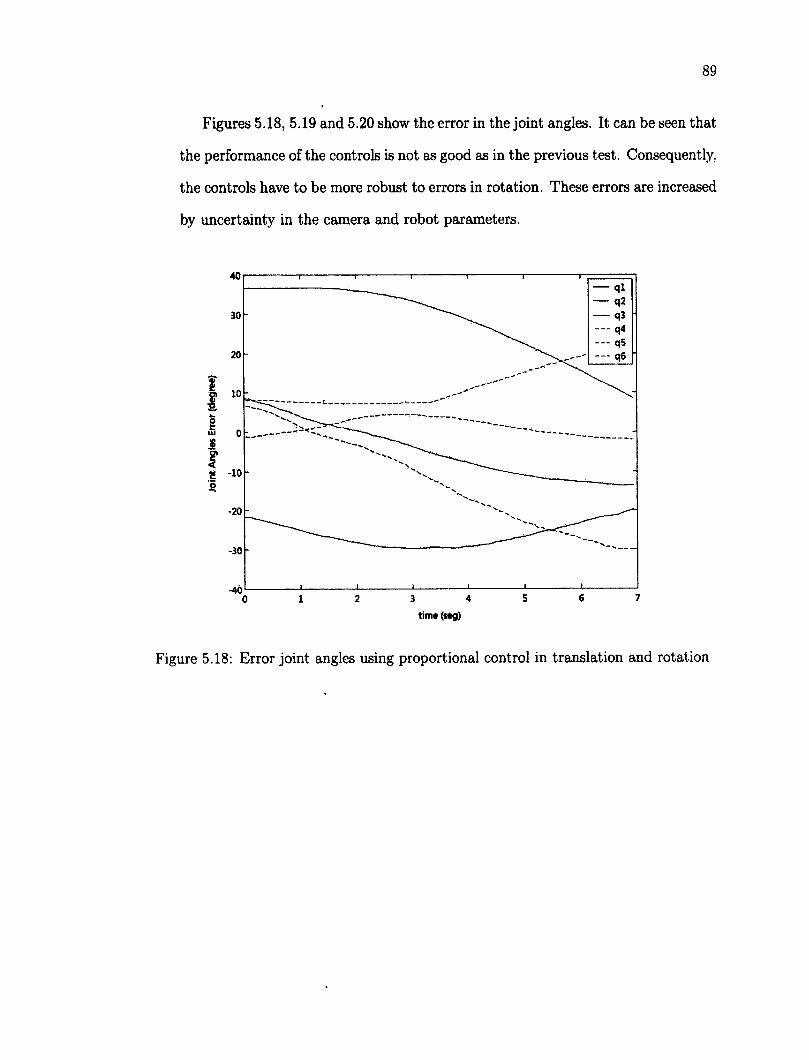
89
Figures 5.18, 5.19 and 5.20 show the error in the joint angles. It can be seen that
the performance of the controls is not as good as in the previous test. Consequently,
the controls have to be more robust to errors in rotation. These errors are increased
by uncertainty in the camera and robot parameters.
--- q5
— q6
I
1
J
-10
-20
-30
-40
Figure 5.18: Error joint angles using proportional control in translation and rotation
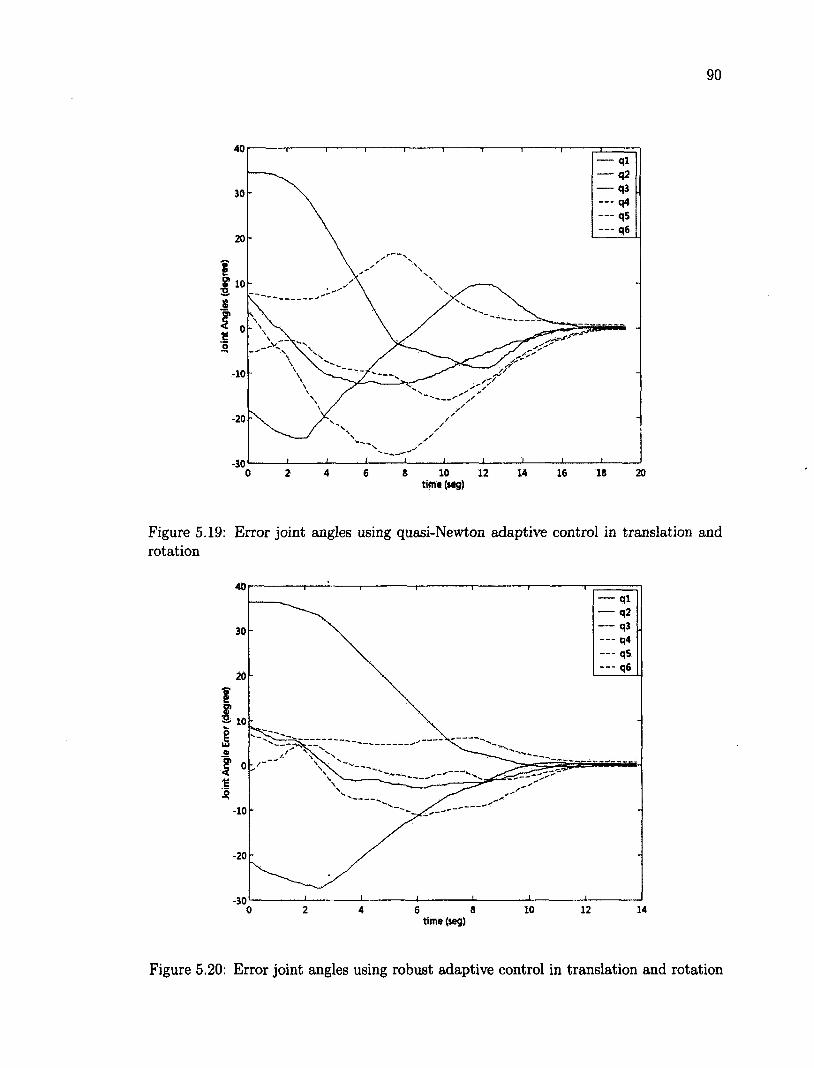
90
— q$
— q6
/ /
-20
-30 4 6 8 10 12 14 16 18 20 0 2
time (sag)
Figure 5.19: Error joint angles using quasi-Newton adaptive control in translation and rotation
— «i q2
- q4
I I LU «
I - / -
€ o
-10
-20
-30 8 10 12 14 0 2 4 6
time (seg)
Figure 5.20: Error joint angles using robust adaptive control in translation and rotation
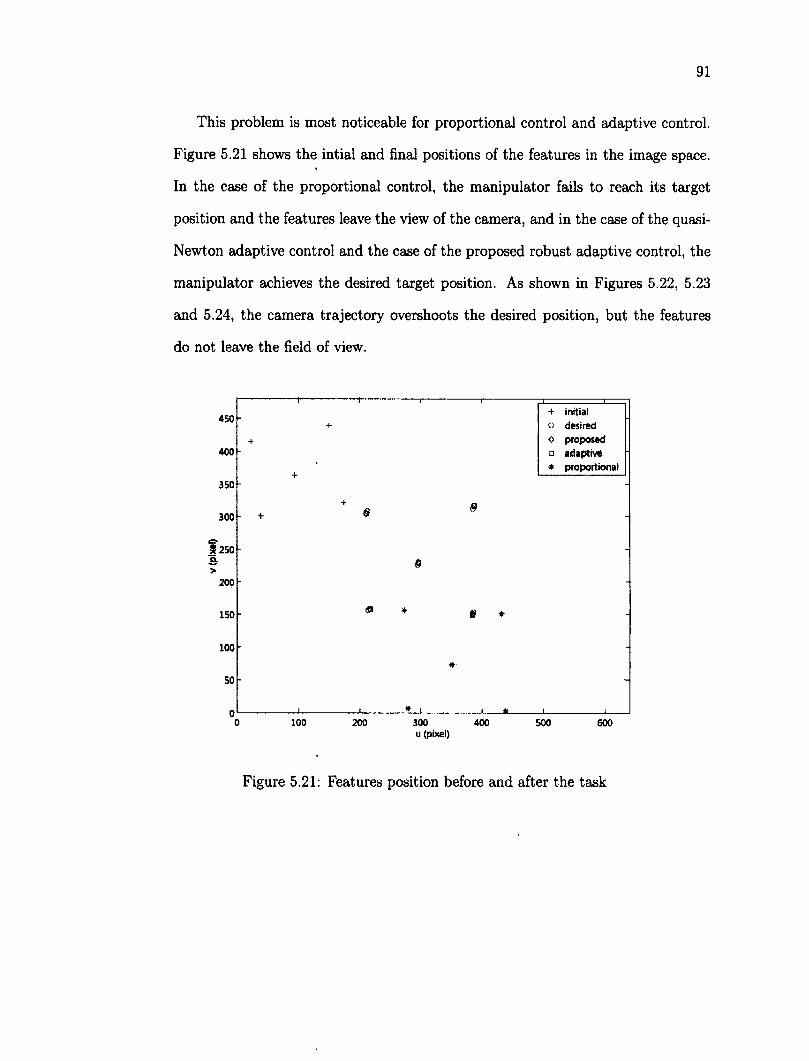
91
This problem is most noticeable for proportional control and adaptive control.
Figure 5.21 shows the intial and final positions of the features in the image space.
In the case of the proportional control, the manipulator fails to reach its target
position and the features leave the view of the camera, and in the case of the quasi-
Newton adaptive control and the case of the proposed robust adaptive control, the
manipulator achieves the desired target position. As shown in Figures 5.22, 5.23
and 5.24, the camera trajectory overshoots the desired position, but the features
do not leave the field of view.
450
400
350
300
3250 & >
200
150
100
50
0 0 100 200 300 400 500 600
u (pixel)
1 t 1 1 + initial
+ o desired
+ O proposed - • adaptive
X * proportional T
+ a
-
- + * 9
A
0 * § *
-
*
i i * i i * 1 I
Figure 5.21: Features position before and after the task
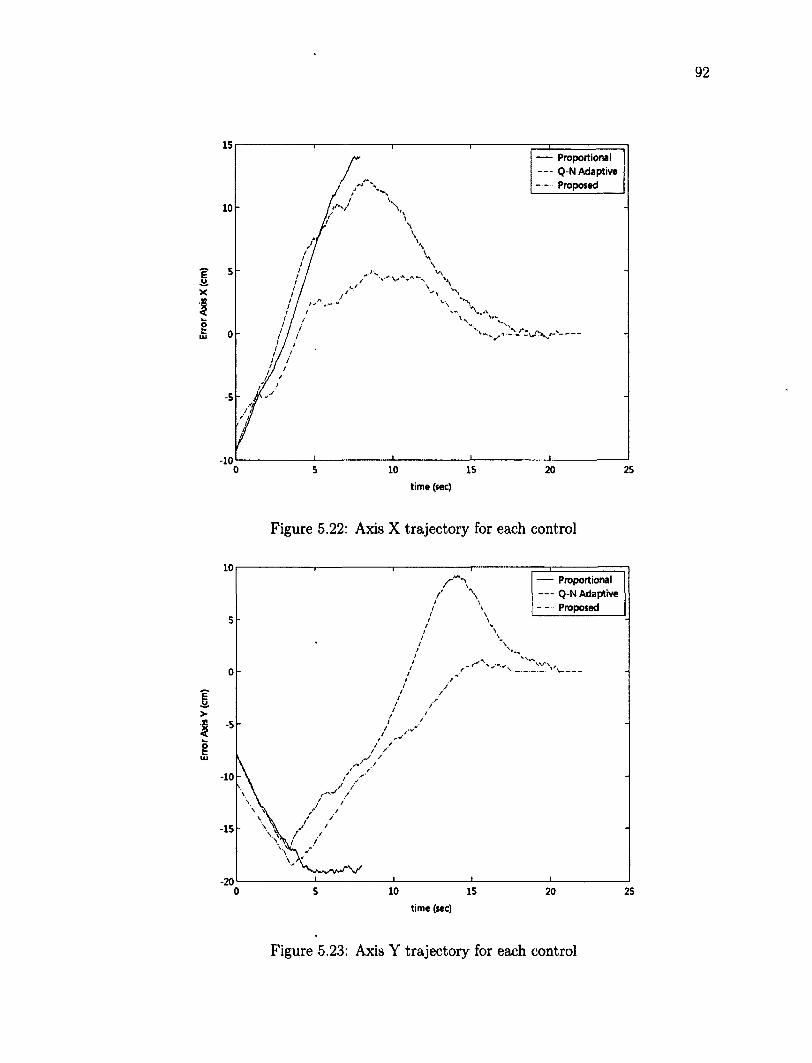
— Proportional — Q-N Adaptive
— Proposed
S
0
5
0 15 5
time (sec)
Figure 5.22: Axis X trajectory for each control
10 — Proportional — Q-N Adaptive
— Proposed 5
0
5 / v
0 15 5 20 25
time (sec)
Figure 5.23: Axis Y trajectory for each control
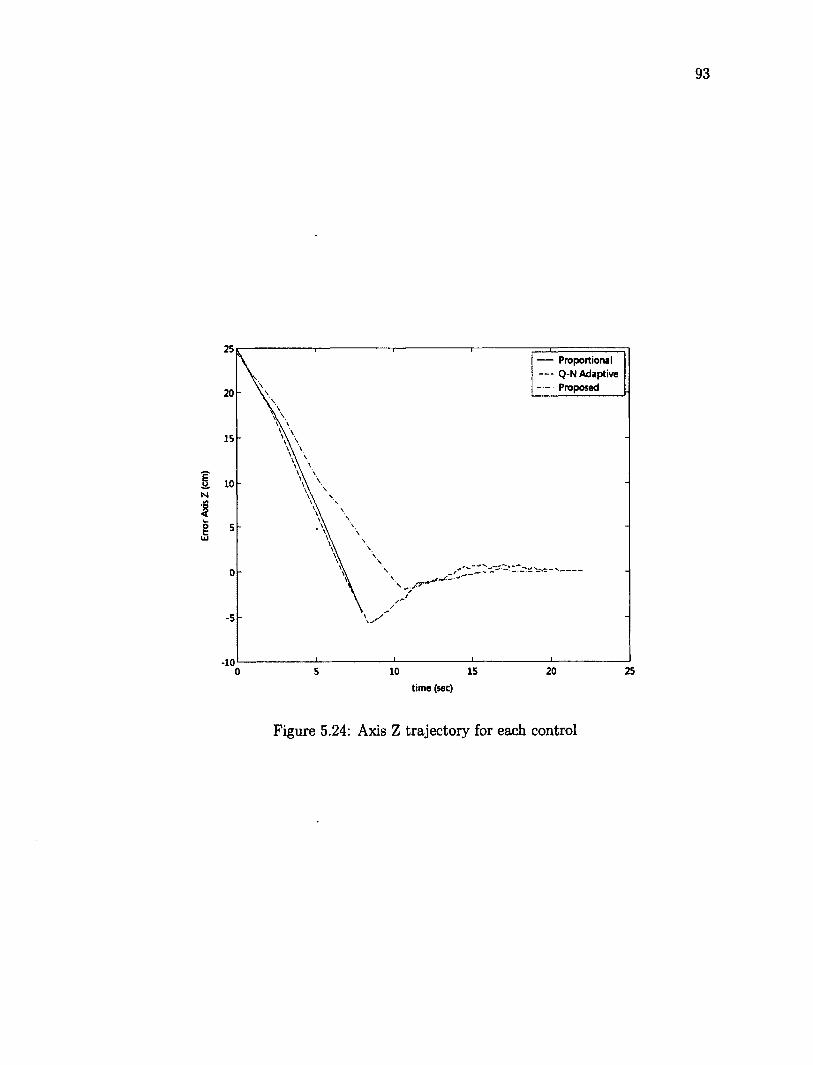
25 Proportional Q-N Adaptive Proposed 20
15
10
5
0
5
10 0
time (sec)
Figure 5.24: Axis Z trajectory for each control
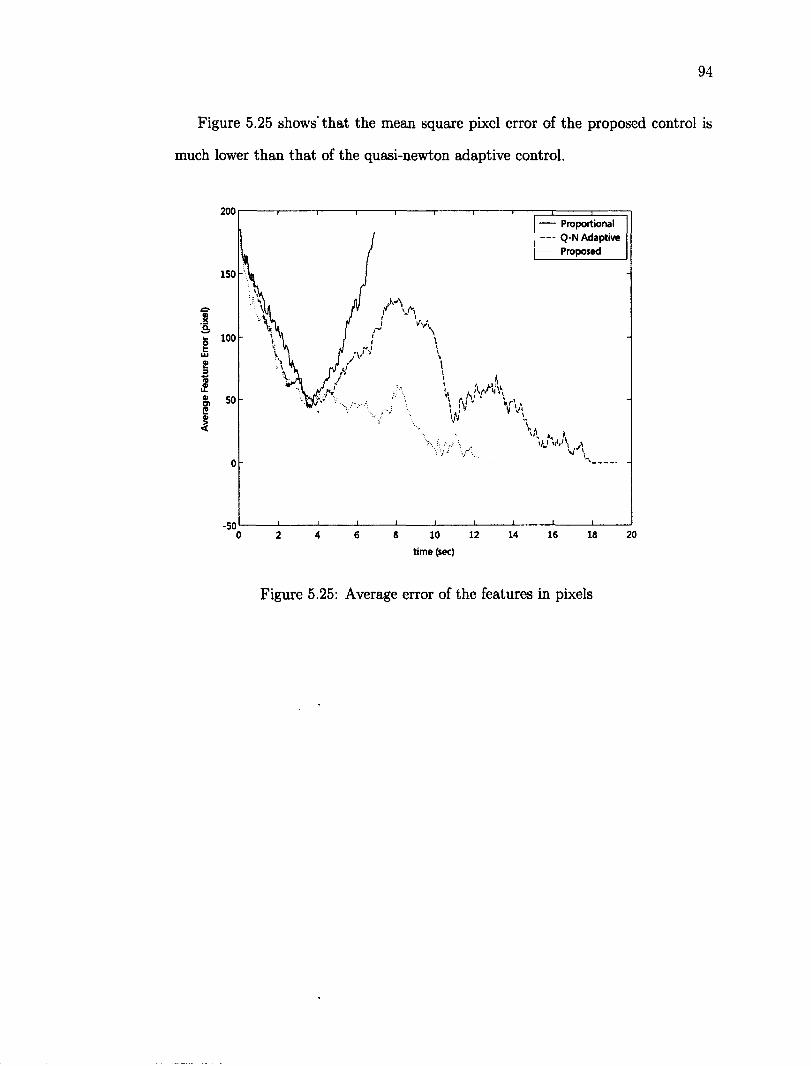
94
Figure 5.25 shows' that the mean square pixel error of the proposed control is
much lower than that of the quasi-newton adaptive control.
I
200
ISO
100
-50
— Proportional -- Q-N Adaptive
Proposed
1 u vV\ v/'v
10
time (sec)
12 14 16 18 20
Figure 5.25: Average error of the features in pixels
95
5.7 Tracking of a Non Planar Object
In this section, we show the tracking of a complex 3D object using our proposed
control. For this experiment, the object to track is a collection of objects with
different shapes, including planar, round and irregular shape. Figure 5.26 shows
the objects: the planar object is a cereal box, the round shape is a small football
and the irregular shape is a face mask. Every object introduces different depth Zi
for each feature. Figure 5.27 shows the desired image and the yellow dots marks
the desired features. Figure 5.28 shows the initial image and the red dots mark the
features to track. For this experiment the initial errors in translation and rotation
are: AP = [10 — 5 — 20] cm and A<j) = [—10 0 — 5] degrees.
The estimation of the image Jacobian was as follows: from the desired position
we measure the distance from each feature to the camera and then we take an
average. The average was used as the depth Zj for each feature. The matrix gains
of the controller were kept the same from the previous experiments.
Figure 5.26: Collection of objects as target
Figure 5.27: Desired position of the features, yellow dots mark the features
97
Figure 5.28: Initial position of the features, red dots mark the initial features
This experiment shows a 3D collection of objects as the target to track. In
this case, the features are composed of blobs and textures. The feature tracking
algorithm has to be able to recognize the features in spite of distortions caused by
variation in the viewing angle and distance to the target. Therefore, in this test,
the use of the AIS for feature tracking plays a more important role. Although more
features give more robustness, we used just 5 features to track the 3D object. In
spite of this fact, the proposed control keeps achieving its target position, but the
trajectory of the camera becomes more oscillatory, as shown in Figure 5.29.Fig-
ures 5.30 and 5.31 show the initial position of the features in image space and the
final position of after the proposed control was applied.
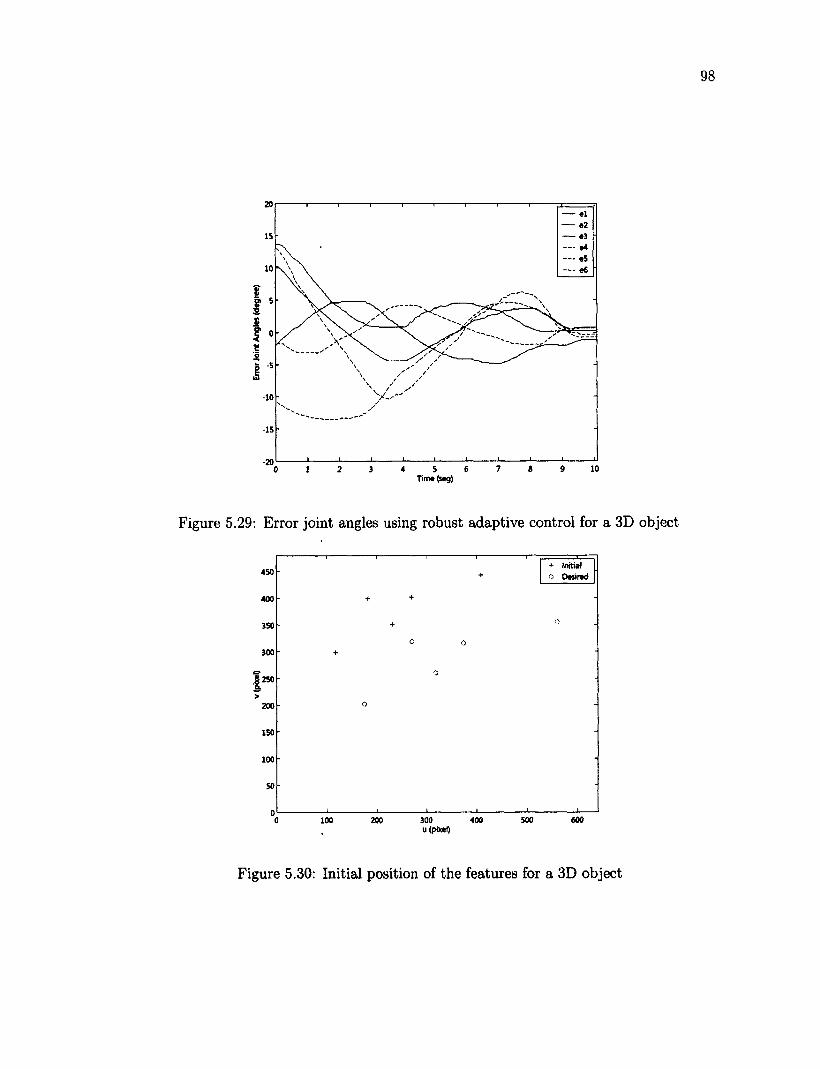
20
IS
10
5
0
-5
10
•15
-20 0 Time (seg)
Figure 5.29: Error joint angles using robust adaptive control for a 3D object
450
400
350
300
1250
200
150
100
600 100 200 300 400 500
+ initial
o Desired
100 200 300 400 u (pixel)
Figure 5.30: Initial position of the features for a 3D object
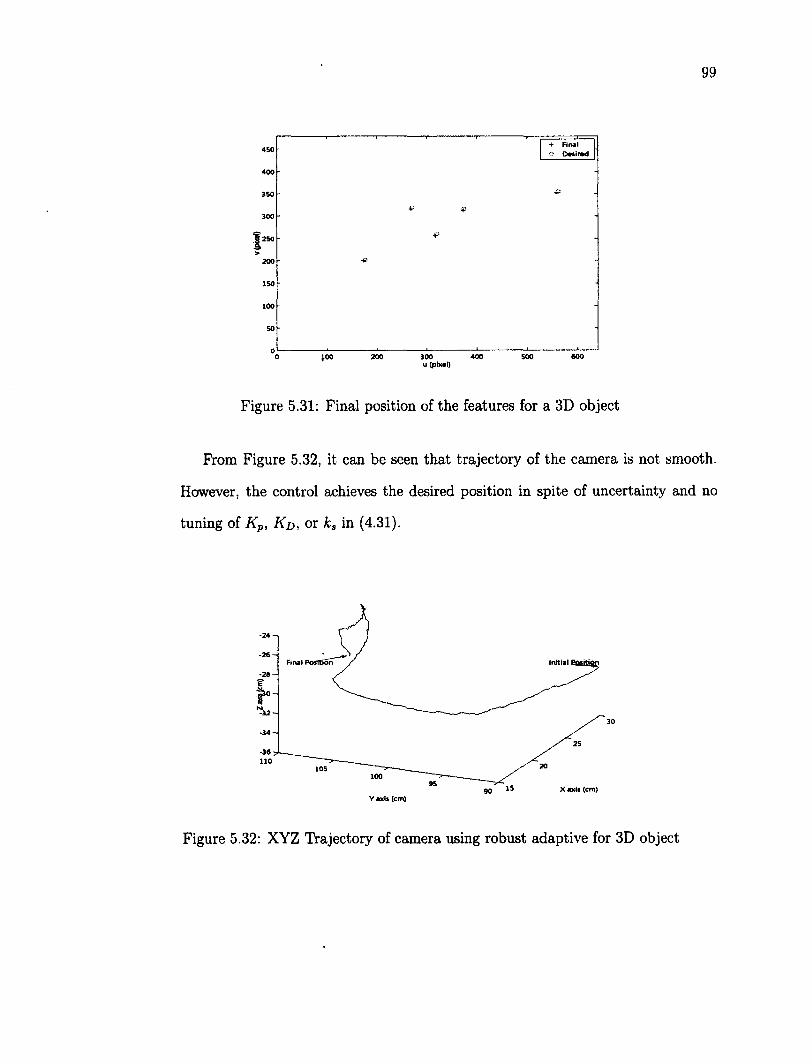
99
450
400
350
300
250
200
150
100
SO
200 300 400 500 600 *00 *00 200 300 400 500 600 u (pixftl)
Figure 5.31: Final position of the features for a 3D object
From Figure 5.32, it can be seen that trajectory of the camera is not smooth.
However, the control achieves the desired position in spite of uncertainty and no
tuning of Kp, K&, or ks in (4.31).
Initial Final
10-
30
25
20 105 100
95 X axis (em) 90
Y axis (cm)
Figure 5.32: XYZ Trajectory of camera using robust adaptive for 3D object
100
Additional tracking tests were conducted on the three controls at various values
for initial target error (in translation and rotation). The proportional control failed
for most values tested. For all values tested, the proposed control moved to the
target position. The Q-N adaptive control also tracked the image, but sometimes
moved to an incorrect position that also corresponded to the correct image. This
is because only 5 feature points were used on the 3D object, resulted in multiple
solutions for camera location. Table 5.7 summarizes these observations.
Control Law Planar Features Planar Features 3D Features Law + Trans Trans & Rot and 3D Motion Proportional + - -
Q-N Adaptive + + •
Robust Adaptive + + +
Table 5.2: Summary of performance for the tested controls under parameters uncertainties. ( + Pass, - Fail, * position-dependent)
5.8 Robustness Testing
This section presents a series of experiments designed to examine the effects of
varying certain parameters on the performance of the controls. These parameters
are:
1. Image Jacobian error
2. Initial depth error
3. Initial rotation error
4. Target position
5.8.1 Effect of Jacobian Error
The first test is performed only on the proposed control and examines the effect of
changing the (constant) image Jacobian used in the control. The desired camera
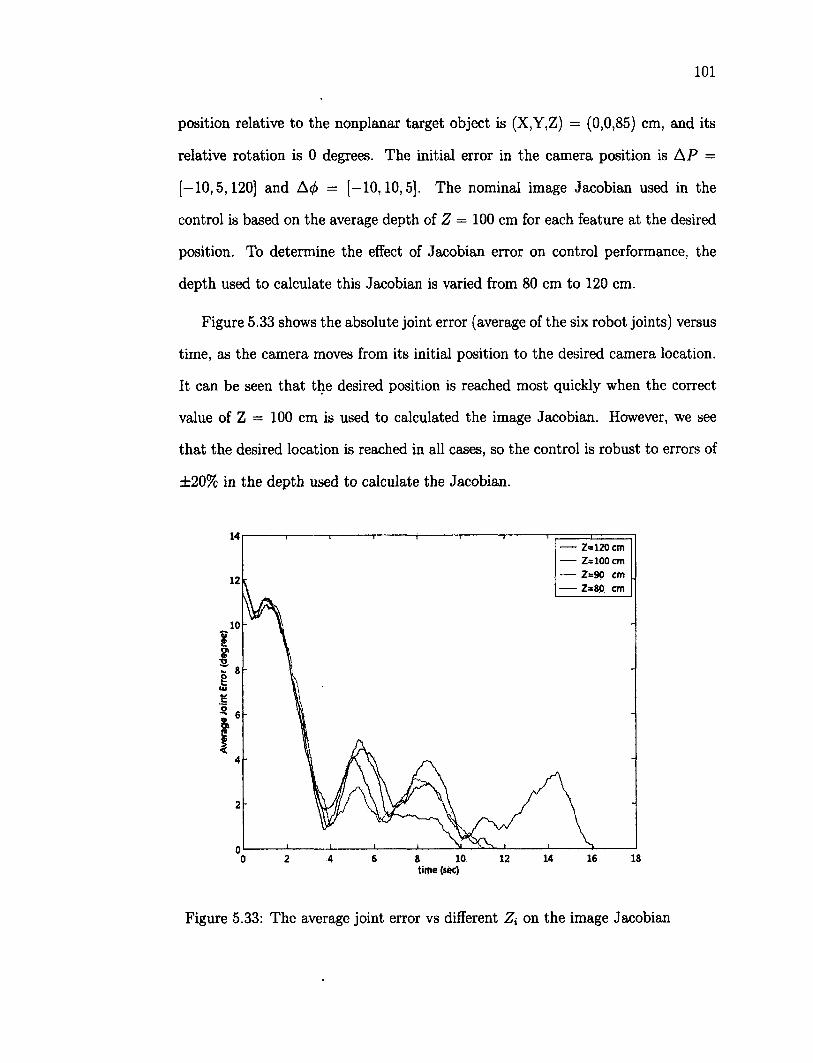
101
position relative to the nonplanar target object is (X,Y,Z) = (0,0,85) cm, and its
relative rotation is 0 degrees. The initial error in the camera position is AP =
[—10,5,120] and A(j> = [—10,10,5]. The nominal image Jacobian used in the
control is based on the average depth of Z = 100 cm for each feature at the desired
position. To determine the effect of Jacobian error on control performance, the
depth used to calculate this Jacobian is varied from 80 cm to 120 cm.
Figure 5.33 shows the absolute joint error (average of the six robot joints) versus
time, as the camera moves from its initial position to the desired camera location.
It can be seen that the desired position is reached most quickly when the correct
value of Z = 100 cm is used to calculated the image Jacobian. However, we see
that the desired location is reached in all cases, so the control is robust to errors of
±20% in the depth used to calculate the Jacobian.
14
12
— 2=120 cm — Z=100 cm — 2=90 em
Z=80 cm
0 0 2 4 6 8 10 12 14 16 18 time (tec)
Figure 5.33: The average joint error vs different on the image Jacobian
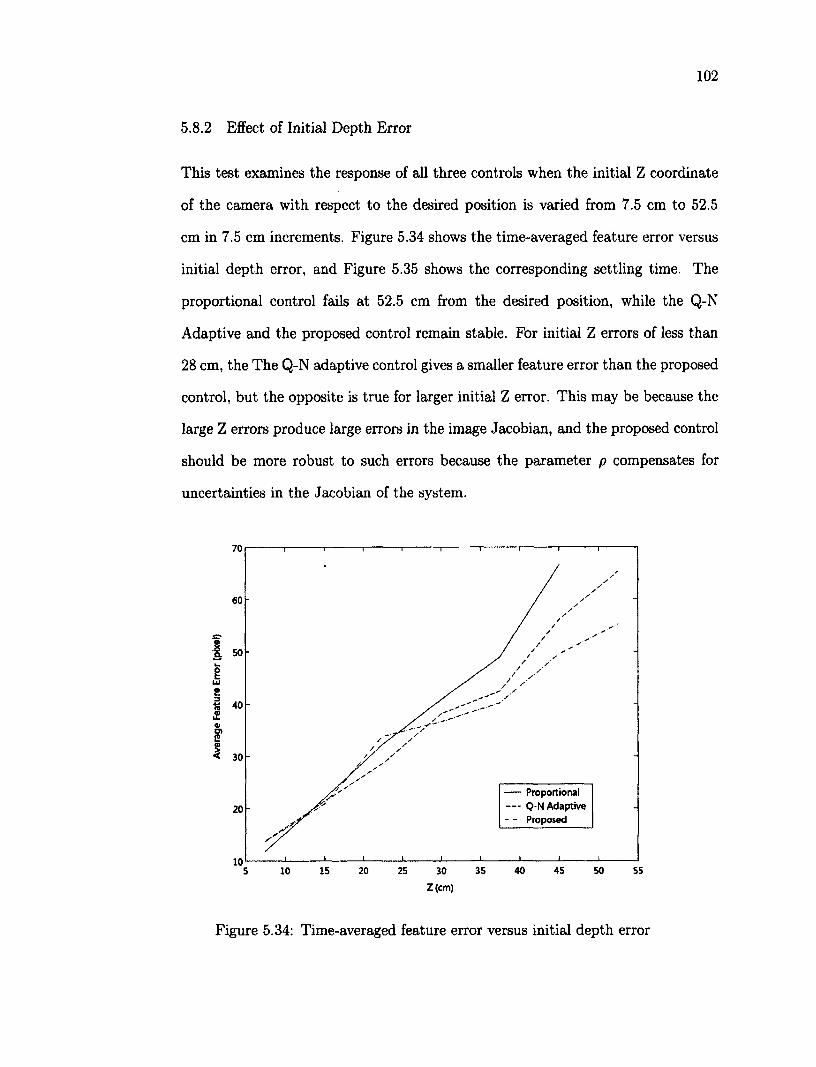
102
5.8.2 Effect of Initial Depth Error
This test examines the response of all three controls when the initial Z coordinate
of the camera with respect to the desired position is varied from 7.5 cm to 52.5
cm in 7.5 cm increments. Figure 5.34 shows the time-averaged feature error versus
initial depth error, and Figure 5.35 shows the corresponding settling time. The
proportional control fails at 52.5 cm from the desired position, while the Q-N
Adaptive and the proposed control remain stable. For initial Z errors of less than
28 cm, the The Q-N adaptive control gives a smaller feature error than the proposed
control, but the opposite is true for larger initial Z error. This may be because the
large Z errors produce large errors in the image Jacobian, and the proposed control
should be more robust to such errors because the parameter p compensates for
uncertainties in the Jacobian of the system.
70
60
40
30
— Proportional — Q-N Adaptive
Proposed 20
10 35 40 15 20 25 45 50 5 30 10
Z(cm)
Figure 5.34: Time-averaged feature error versus initial depth error
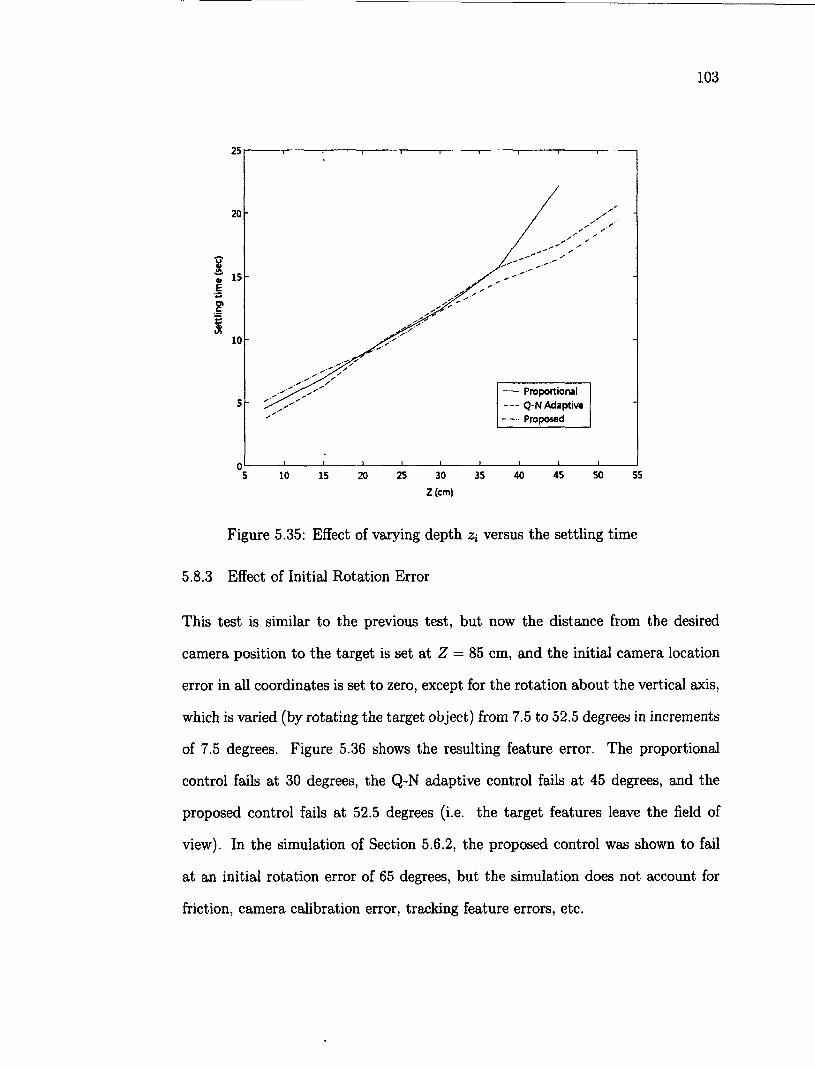
103
20
15
10
— Proportional — Q-N Adaptive
Proposed
5
Z(cm)
Figure 5.35: Effect of varying depth Zi versus the settling time
5.8.3 Effect of Initial Rotation Error
This test is similar to the previous test, but now the distance from the desired
camera position to the target is set at Z — 85 cm, and the initial camera location
error in all coordinates is set to zero, except for the rotation about the vertical axis,
which is varied (by rotating the target object) from 7.5 to 52.5 degrees in increments
of 7.5 degrees. Figure 5.36 shows the resulting feature error. The proportional
control fails at 30 degrees, the Q-N adaptive control fails at 45 degrees, and the
proposed control fails at 52.5 degrees (i.e. the target features leave the field of
view). In the simulation of Section 5.6.2, the proposed control was shown to fail
at an initial rotation error of 65 degrees, but the simulation does not account for
friction, camera calibration error, tracking feature errors, etc.
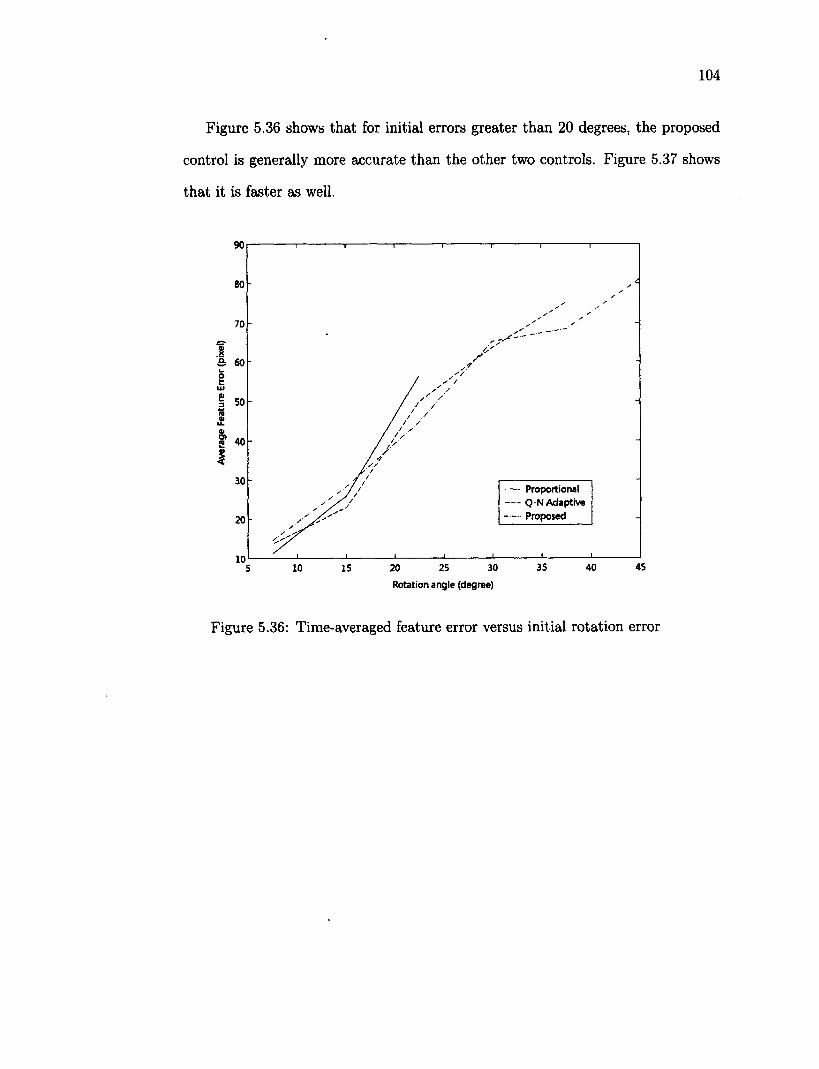
104
Figure 5.36 shows that for initial errors greater than 20 degrees, the proposed
control is generally more accurate than the other two controls. Figure 5.37 shows
that it is faster as well.
— Proportional — Q-N Adaptive
Proposed
20 25 30
Rotation angle (degree)
35 40 45
Figure 5.36: Time-averaged feature error versus initial rotation error
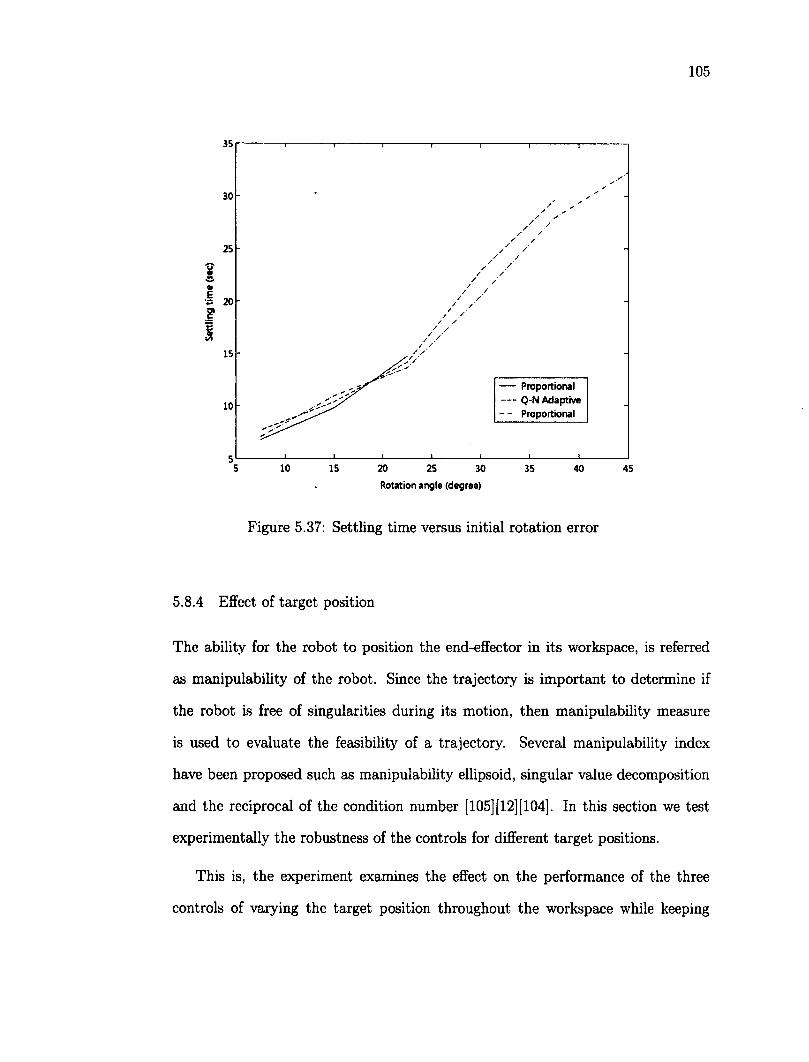
105
35
30
25
1 4>
I 20 jp
1 15
10
5 5 10 15 20 25 30 35 40 45
Rotation angle (degree)
Figure 5.37: Settling time versus initial rotation error
5.8.4 Effect of target position
The ability for the robot to position the end-effector in its workspace, is referred
as manipulability of the robot. Since the trajectory is important to determine if
the robot is free of singularities during its motion, then manipulability measure
is used to evaluate the feasibility of a trajectory. Several manipulability index
have been proposed such as manipulability ellipsoid, singular value decomposition
and the reciprocal of the condition number [105] [12] [104]. In this section we test
experimentally the robustness of the controls for different target positions.
This is, the experiment examines the effect on the performance of the three
controls of varying the target position throughout the workspace while keeping
Proportional Q-N Adaptive Proportional
1
106
constant the desired camera position with respect to the target (Z = 85 cm, and
all other coordinates close to zero). The initial error in the camera position is also
constant for each trial and is set to [X,Y,Z] = [-5,10,35], with zero rotation error.
The left column of Table 5.3 shows the desired position of the camera in world
coordinates (corresponding to various target positions). The other columns show
the corresponding time-averaged feature error and settling time of the three con
trols. The proposed control and the Q-N adaptive control reach the desired position
for all target positions tested, but the proportional control fails at the first two tar
get positions. Figure 5.38 shows the robot at the six desired camera positions.
Settling Time (s) Average Feature Error (pixels) Desired Proportional Proposed Q-N Proportional Proposed Q-N
Position (cm) Adaptive Adaptive [40 -20 100] n/a 11.4 12.93 n/a 40.08 48.84 [35 15 110] n/a 13.51 12.40 n/a 44.23 40.76 [20 -50 95] 10.09 8.5 9.1 43.04 37.07 42.09 [0 -25 90] 14.19 13.57 12.91 66.84 64.69 60.20 [-5 -70 95 16.07 12.45 14.71 79.34 65.80 72.83
[20 -25 110] 8.26 7.99 8.35 42.93 34.23 39.79
Table 5.3: Testing the law controls for different positions on workspace of the robotic arm
107
Figure 5.38: Visual servoing control throughout the robot work space
5.9 Tracking a Moving Target Object
5.9.1 Rectangle Trajectory
The control proposed is designed for fixed object position, however we also tested
the ability of the control to track moving objects. In this experiment, the robot
tracked the target shown in Figure 5.6. The target was moved manually around
a 30 cm X 20 cm rectangle in the X-Z plane of the camera without rotating the
target. The desired camera position with respect to the target was set to Z = 80
cm. with all other coordinates set near zero. Tape guides on a table were used to
keep the edges of the reference rectangle straight, but there was some shiver in the
manual motion of the target.
Figure 5.39 shows the reference trajectory and the camera trajectory. The
camera trajectories in the Z direction are seen to be at a slight angle with respect
to the reference edges. This may be due to the target being slightly rotated about
the camera Y axis after the desired target image was taken, since X-displacements
are very sensitive to Y-rotations.
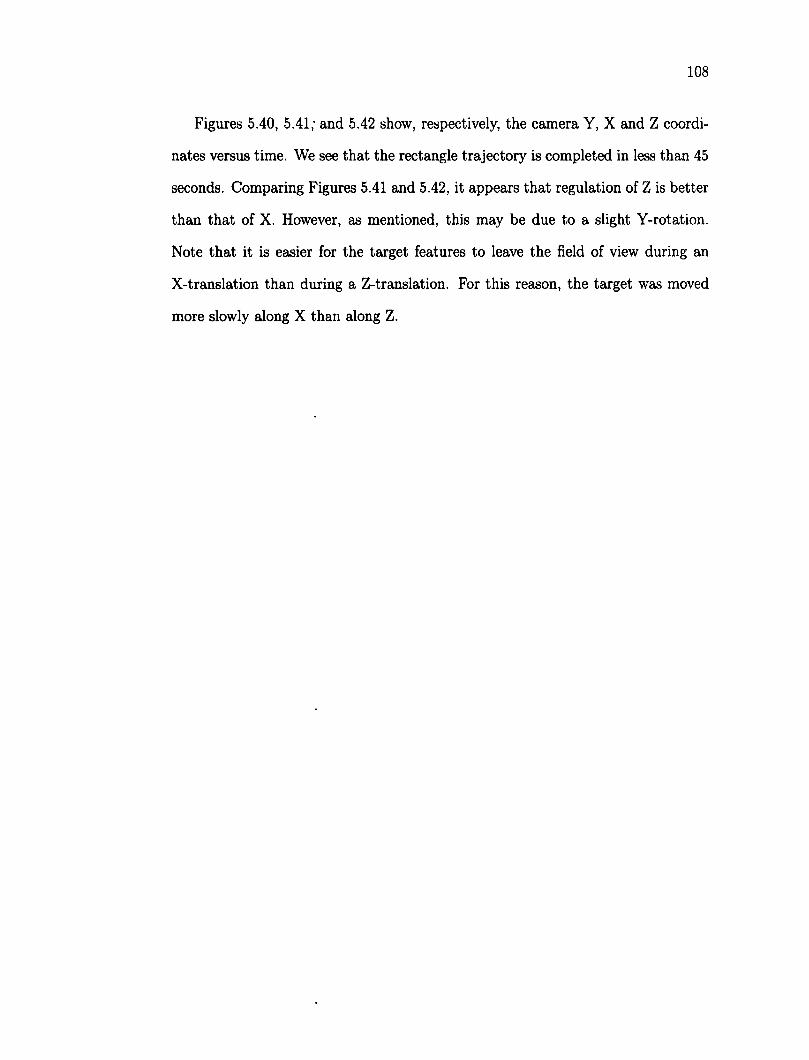
108
Figures 5.40, 5.41; and 5.42 show, respectively, the camera Y, X and Z coordi
nates versus time. We see that the rectangle trajectory is completed in less than 45
seconds. Comparing Figures 5.41 and 5.42, it appears that regulation of Z is better
than that of X. However, as mentioned, this may be due to a slight Y-rotation.
Note that it is easier for the target features to leave the field of view during an
X-translation than during a Z-translation. For this reason, the target was moved
more slowly along X than along Z.
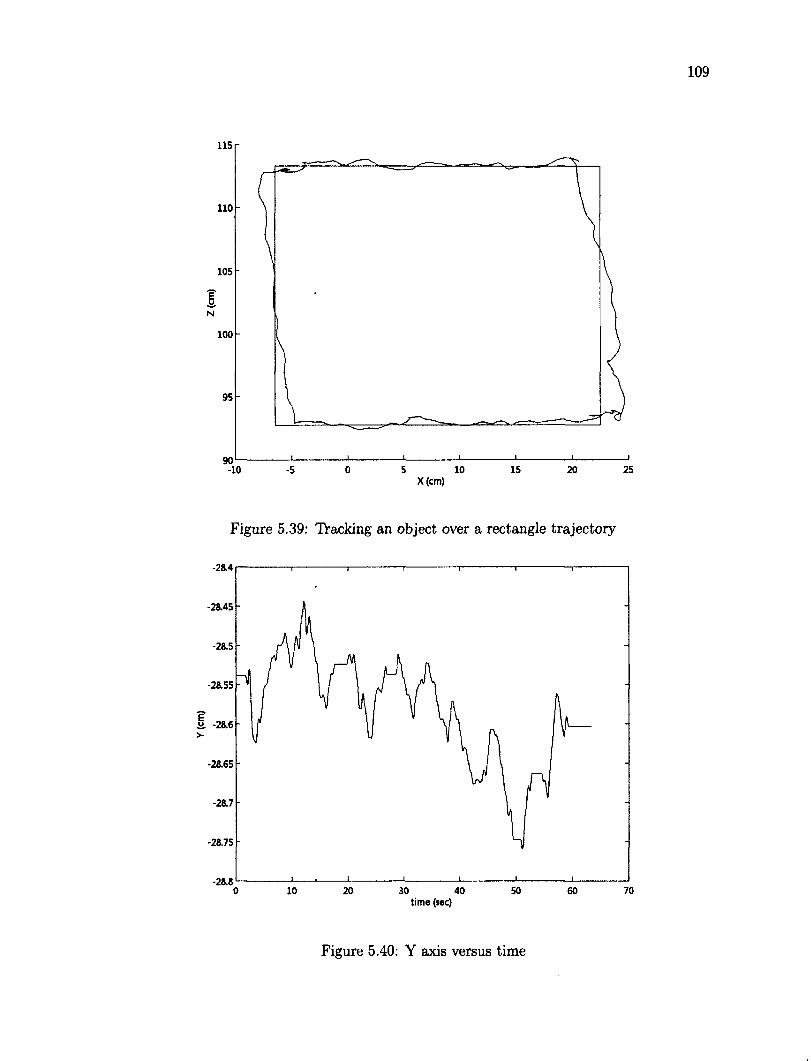
115
110
105
100
95
-10 -5 0 5 10 15 20 25 X(em)
Figure 5.39: Tracking an object over a rectangle trajectory
-28.4
-28.45
-28.5
-28.55
U. -28.6
-28.65
-28.7
-28.75
-28.8 30 50 0 10 20 40 60 70
time (sec)
Figure 5.40: Y axis versus time
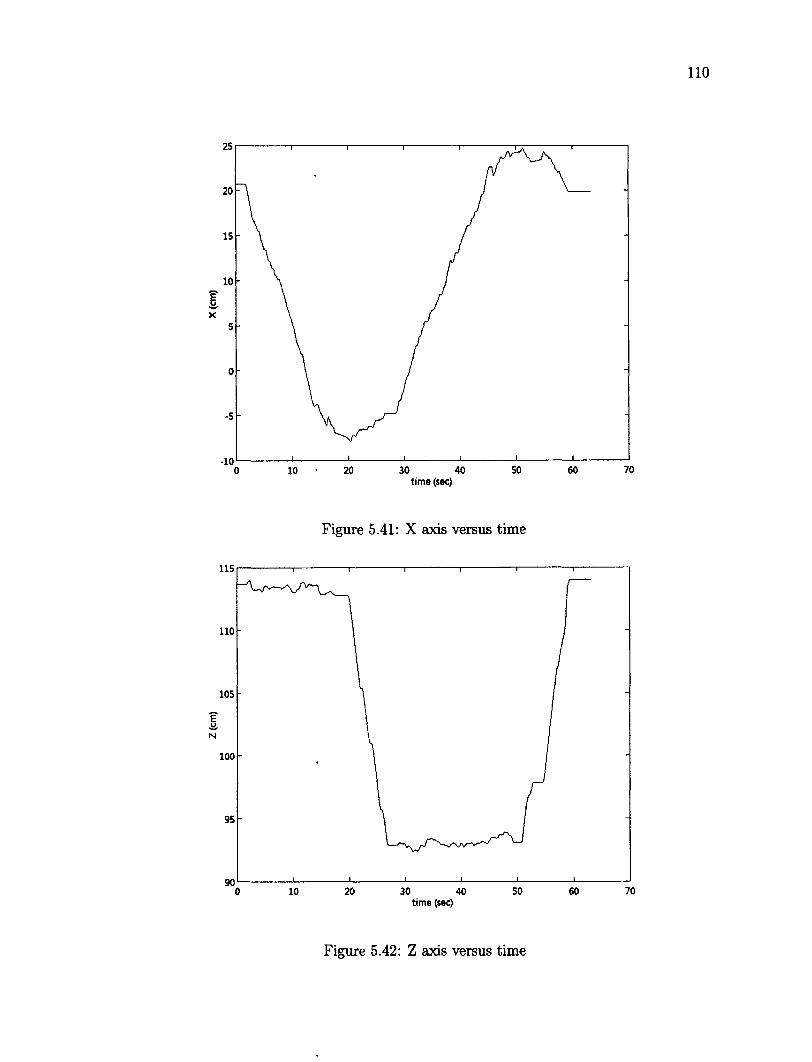
-10
time (sec)
Figure 5.41: X axis versus time
115
110
105
E
N
100
time (sec)
Figure 5.42: Z axis versus time
I l l
5.9.2 Elliptical Trajectory
In this experiment, the moving object is also moved manually around the elliptical
trajectory nominally indicated by the smooth curve in Figure 5.43. The target
starts near the bottom of the ellipse and moves counterclockwise. The actual target
trajectory was not exact because it was achieved manually, with a major axis of
roughly 30 cm and minor axis of 20cm. The desired camera position with respect
to the target was set to Z = 80 cm, with all other coordinates set near zero. The
second curve shown in Figure 5.43 is the camera trajectory. The features always
remained within the field of view as the camera tracked the target object.
Figures 5.45, 5.46, and 5.44 show, respectively, the camera X, Y and Z coor
dinates versus time. The duration of the ellipse trajectory was approximately 23
seconds. Figures 5.41 and 5.40 suggest that regulation of Y is better than that of
X, but the oscillations may actually be in the trajectory of the (manually driven)
target object.
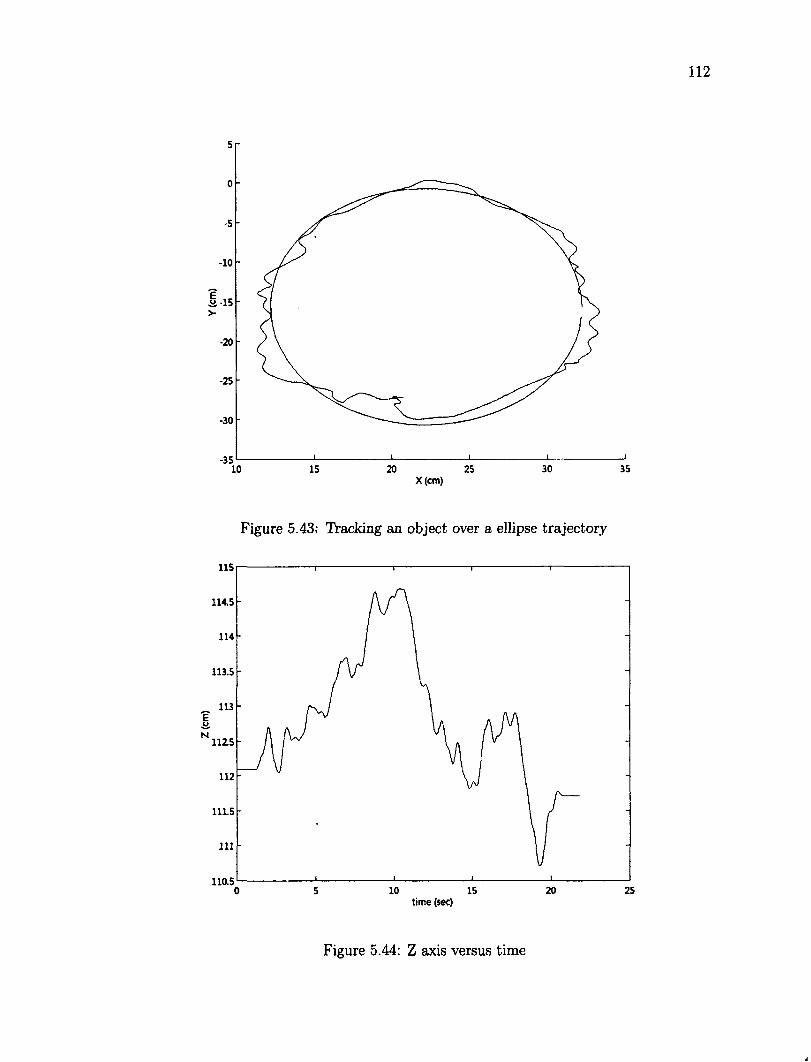
112
10 15 20 25 30 35 X (cm)
Figure 5.43; IVacking an object over a ellipse trajectory
115
114.5
114
113.5
113 -E .u
N
112
111.5
111
110.5 10 15 20 25 0 5
time (sec)
Figure 5.44: Z axis versus time
A
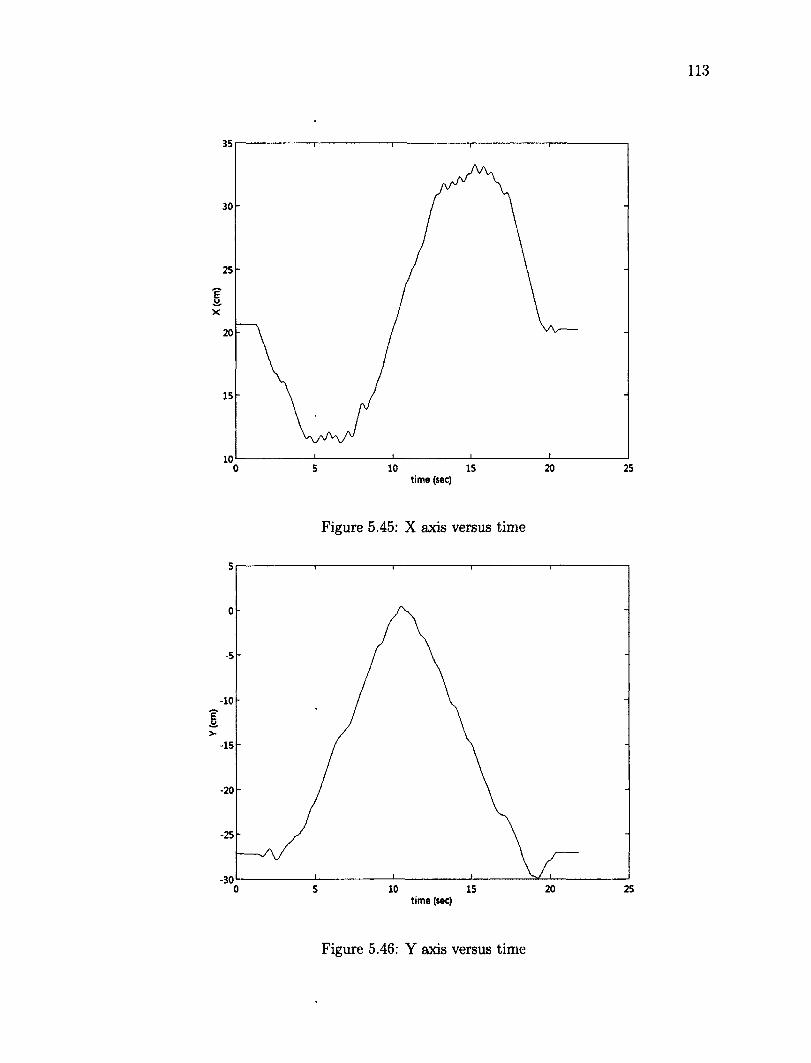
35
30
25
? v.
X
20
15
10 0
time (sec)
Figure 5.45: X axis versus time
-10
>
-15
-20
-25
-30 10 20 0 5 15 25
time (sec)
Figure 5.46: Y axis versus time
114
Chapter 6
Conclusion
6.1 Summary and Conclusions
In this dissertation, we have described the design of an adaptive visual servoing
system that is robust to uncertainties in camera and robot parameters. An im
portant feature of this system is that the feature tracking software and the robot
control software were both developed from the bottom up and integrated on an
open-architecture platform developed in the lab. This is in contrast to most sys
tems described in the literature, which integrate commercially-available software
components (for feature tracking, robot control, or both). The advantage of our
approach is that any component can be redesigned or tuned for a particular appli
cation.
In Chapter 2, we described various approaches to the visual servoing problem
and classified our proposed approach as Image-based Visual Servoing (IBVS).
In Chapter 3, we considered the problem of feature extraction and proposed
a new approach that behaves as an Artificial Immune System (AIS). AIS have
been previously used for optimization, but not for feature extraction in vision sys
tems. We evaluated the performance of the AIS using histogram and template
object representations, and found that the template representation provided the
best accuracy and processing speed. Experiments showed that the AIS is capable
of tracking objects under affine transformations and nonlinear distortions and can
track multiple features in real time.
115
In Chapter 4, we proposed a novel control that is robust to uncertainties in
robot parameters and in the camera calibration. This control includes an adaptive
component that updates kinematic and dynamic parameters. It also includes a
model of the uncertainty in the extrinsic parameters of the camera calibration,
expressed as an error bound on the system Jacobian. The proposed control was
proved to be stable and the tracking error approaches zero, via Lasalle's invariance
principle. Simulations showed that the control was robust to uncertainty in the
system Jacobian.
In Chapter 5, we presented experiments on a PUMA robot comparing the per
formance of the proposed control versus that of two other controls (proportional
and Quasi-Newton adaptive). An open-architecture controller (described in Ap
pendix B) was developed for this purpose.
Sections 5.6 through 5.8 reported experiments involving the tracking of a sin
gle displacement of an object (versus a continuously-moving object). In Section
5.6, all three controls successfully tracked a planar object in translation, but the
proportional control failed when rotations were included. The proposed control out
performed the other controls in these tests and reduced settling time in translation
tests by up-to 16 percent.
Section 5.8 presented a series of experiments investigating the robustness of the
controls to changes in four parameters. In 5.8.1, it was shown that the proposed
control was robust to errors in the system Jacobian. The effect of initial camera
depth error was investigated in Section 5.8.2. For large initial errors, the propor
tional control failed, and the proposed control outperformed the Q-N Adaptive
Control. In Section 5.8.3, it was shown that all three controls fail for sufficiently
large initial rotation errors but that the proposed control is the most robust. Fi
116
nally, the effect of target position in the workspace was considered in Section 5.8.4.
While the proportional control failed at two positions, the other two controls were
always stable and had similar performance. In Section 5.9, it was shown that the
proposed control can track a planar object moving in the X-Z and X-Y planes, but
at limited speed.
In conclusion, the proposed control was found to be more robust than the pro
portional control and the Q-N adaptive control and was generally faster and more
accurate. The robustness of the proposed control to uncertainty in camera param
eters is a useful feature because camera calibration is a slow and tedious process,
and calibration errors can cause instability. Its robustness to robot model uncer
tainty eliminates the need to change the kinematic and dynamic parameters when
the robot switches to a different tool, for example.
6.2 Limitations and Future Work
The open architecture controller facilitates future improvements of the system to
address current limitations of the proposed control. These are:
- Need for manual tuning The control contains three gains that must be
tuned manually (e.g. by experimentation): the twelve PD gains and the un
certainty bound p in the system Jacobian. The control would be more adaptive
if it tuned these parameters automatically.
- Improve object target tracking. A modification of the control is needed to
improve the tracking of the object in motion. The inclusion of the estimation
of the velocity of the object requires a control law for non-autonomous systems.
- Improve sample frequencies. Better results may be achieved if the sam-
117
pie frequency increases, by introducing a faster camera frame and processing
power.
- No occlusion handling. The current control requires that all of the target
features be visible. This limits the displacement of the object in the field of
view and does not allow occluding objects in the scene. Therefore, a method
ology to handle occlusions is needed for some applications.
Bibliography
[1] A. Remazeilles A. Diosi, F. Spindler and F. Chaumette. Visual path following
using only monocular vision for urban environments. Intelligent Robots and
Systems, IROS, December, 2007.
[2] D. Harwood A. Elgammal and L. Davis. Non-parametric model for back
ground subtraction. In Proceedings of the European Conference on Computer
Vision, pages 751-767, 2000.
[3] L. Xin A. Yilmaz and M. Shah. Contour-based object tracking with occlusion
handling in video acquired using mobile cameras. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 26(11): 1531—1536, 2004.
[4] Y. Adbel-Aziz and H. Karara. Direct linear transformation from comparator
coordinates into object space coordinates in close-range photogrammetry. In
Proc. ASP/UI Symp. on Close-Range Photogrammetry, pages 1-18, Jan ,
1971.
[5] S. Avidan. Ensemble tracking. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 29(2):261—271, 2007.
[6] N.J. Ayache. Artificial vision for mobile robots: Stereo vision and multisen-
sory perception. English translation by P.T. Sanders, MIT , 1991.
[7] F. Chaumette B. Espiau and P.Rives. A new approach to visual servoing
in robotics. IEEE Transactions on Robotics and Automation, 8(3):313—325,
June 1992.
[8] S. T. Birchfield and S. Rangarajan. Spatiograms versus histograms for region-
based tracking. In Proceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, 2:1158-1163, 2005.
118
119
[9] C. M. Bishop. Neural networks for pattern recognition, 1995.
[10] E. Bradski. Computer vision face tracking for use in a perceptual user inter
face. technical report, intel corporation, 1998.
[11] R. Brunelli. Template Matching Techniques in Computer Vision: Theory and
Practice. John Wiley and Sons, 2009.
[12] Gosselin C. Dexterity indices for planar and spatial robot manipulator.
Robotics and Automation Proc. Int. Conf., Vol 1, pages 650-655, 1990.
[13] O. Camps C. Gentile and M. Sznaier. Segmentation for robust tracking in
the presence of severe occlusion. IEEE Transactions on Image Processing,
13(2) :166—178, 2004.
[14] B. Z. Yuan C. K. Wan and Z. J. Miao. A new algorithm for static camera
foreground segmentation via active coutours and gmm. In Proceedings of the
IEEE International Conference on Pattern Recognition, pages 1-4, 2008.
[15] M. Le Borgne C. Samson and B. Espiau. Robot control, the task function
approach. Robotica, Oxford University Press, 1991.
[16] M. J. Brooks C. Shen and A. van den Hengel. Augmented particle filtering for
efficient visual tracking. In Proceedings of the IEEE International Conference
on Image Processing, 3:856-859, 2005.
[17] S. Peeta C. Shu-Ching, S. Mei-Ling and Z. Chengcui. Learning-based
spatio-temporal vehicle tracking and indexing for transportation multimedia
database systems. IEEE Transactions on Intelligent Transportation Systems,
4(3).154-167, 2003.
[18] R. Duraiswami C. Yang and L. Davis. Fast multiple object tracking via a hi
erarchical particle filter. In Proceedings of the IEEE International Conference
on Computer Vision, 1:212-219, 2005.
120
[19] Gleason Carlisle and McGhie. The puma/vs-100 robot vision system. Proc.
of the fist International Conference on Robot Vision and, Sensory Controls,
pages 149-160, 1981.
[20] A. Castano and S. Hutshinson. Visual compliance: Task-directed visual servo
control. IEEE Transactions on Robotics and Automation, 10(3):334-345,
June 1994.
[21] C. Chang and R. Ansari. Kernel particle filter for visual tracking. IEEE
Signal Processing Letters, 12(3):242-245, 2005.
[22] Francois Chaumette. The confluence of vision and control. Chapter: Poten
tial problems of stability and convergence in image-based and position-based
visual servoing. Springer-Verlag, 1999.
[23] Francois Chaumette and Ezio Malis. 2 1/2 visual servoing: a possible solution
to improve image-based and position-based visual servoings. IEEE Int. Conf
on Robotics and Automation, ICRA2000, 2000.
[24] Macnab CJB. Preventing bursting in approximate-adaptive control when
using local basis functions. Fuzzy Sets Systems, pages 439-462, 2009.
[25] D. Comaniciu and P. Meer. Robust analysis of feature spaces: color image
segmentation. In Proceedings of the IEEE Conference on Computer Vision
and Pattern Recognition, pages 750-755, 1997.
[26] D. Comaniciu and P. Meer. Mean shift: a robust approach toward feature
space analysis. IEEE Transactions on Pattern Analysis and Machine Intelli
gence, pages 603-619, 2002.
[27] P.I. Corke. Visual servo control of manipulators -a review. In K. Hashimoto,
editor, Visual Servoing, 7:1—31, 1993.
121
[28] P.I. Corke and S.A. Hutchinson. Real-time vision, tracking and control. In
Proc. IEEE Intl. Conf. on Robotics and Automation, pages 622-629, April
2000.
[29] J. Czyz. Object detection in video via particle filters. In Proceedings of the
IEEE International Conference on Pattern Recognition, 1:820-823, 2006.
[30] M. Nachtegael D. Van der Weken and E. Kerre. Using similarity measures
for histogram comparison. In Fuzzy Sets and Systems, 56(1):1—9, 2003.
[31] K. Deguchi. Optimal motion control for image-based visual servoing by de
coupling translation and rotation. In Proc. IEEE/RSJ Intl. Conf. on Robotics
and systems, pages 705-711. October, 1998.
[32] F. Dionnet and E. Marchand. Stereo tracking and servoing for space appli
cations. Advanced Robotics, 23(5):579-599, April, 2009.
[33] T. Drummond and R. Cipolla. Real-time tracking of multiple articulated
structures in multiple views. In Proc. 6th European Conference on Computer
Vision, volume 2:20-36, July, 2000.
[34] R. Freund E. Osuna and F. Girosit. Training support vector machines: an
application to face detection. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, pages 130-136, 1997.
[35] B. Espiau. Effect of camera calibration errors on visual servoing in robotics.
In Proc. 3th Int. Sym. Experimental Robotics, Kyoto, Oct., 1993.
[36] P.Martinet F. Berry and J. Gallice. Real time visual servoing around a com
plex object. IEICE Transactions on Information and Systems, E83-D:1358-
1368, July 2000.
[37] P.Rives F. Chaumette and B. Espiau. Robot motion planning. In Proc. IEEE
Intl. Conf. on Robotics and Automation, 3:2248-2253, Sacramento, 1991.
122
[38] O.D. Faugeras and G. Toscani. The calibration problem for stereo. In Proc.
conf. Computer Vision and Pattern Recognition, pages 15-20, 1986.
[39] R. Feghali and A. Mitiche. Spatiotemporal motion boundary detection and
motion boundary velocity estimation for tracking moving objects with a mov
ing camera: a level sets pdes approach with concurrent camera motion com
pensation. IEEE Transactions on Image Processing, 13(11); 1473-1490, 2004.
[40] D. Dawson Frak Lewis and C. Abdallah. Robot maipulator control: theory
and, practice. Marcel Dekker, Englewood Cliffs, NJ, 2004.
[41] Y.Mezouar G. Blanc, O. Ait-Aider and T. Chauteau. Autonomous image-
based navigation in indoor enviroment. Symposium on Intelligent Au
tonomous Vehicles, Portugal, July, 2004.
[42] M. Dewan G. D. Hager and C. V. Stewart. Multiple kernel tracking with ssd.
In Proceedings -of the IEEE Conference on Computer Vision and Pattern
Recognition, 1:790-797, 2004.
[43] J.Szewczyk G. Morel, T.Liebezeit and S. Boudet. Lecture notes in control
and information sciences. Experimental Robotics VI, 250:99-108, 2000.
[44] H. Krim G. Unal and A. Yezzi. Fast incorporation of optical flow into active
polygons. IEEE Transactions on Image Processing, 14(6):745-759, 2005.
[45] D. Gamerman. Markov chain monte carlo: stochastic simulation for bayesian
inference. 2006.
[46] S. Baluja H. A. Rowley and T. Kanade. Neural network-based face detection.
IEEE Transactions on Pattern Analysis and Machine Intelligence, pages 23-
38, 1998.
[47] G.D. Hager. A modular system for robust positioning using feedback stereo
123
vision. IEEE Transactions on Robotics and Automation, 13(4):582-595, Au
gust, 1997.
[48] R. I. Hartley and A. Zisserman. Multiple View Geometry in Computer Vision.
Cambridge University Press, second edition, 2004.
[49] J. Hill and W.T. Park. Real time control of a robot with a mobile camera.
In Proc. 9th International Symposium on Industrial Robots, pages 233-246,
Washington D.C, March 1979.
[50] Steven A. Hofmeyr. An interpretation introduction to the immune system.
Dept. of Computer Science, Univ. of New Mexico, April 25, 2000.
[51] N. Hollinghurst. Uncalibrated stereo and hand-eye coordination. PhD Thesis,
Deparment of Engineering, University of Cambridge, 1997.
[52] N. Hollinghurst and R. Cipolla. Uncalibrated stereo hand-eye coordination.
Image and Vision Computing, 12(3):187—192, 1994.
[53] J. J. Hopfield. Neural networks and physical systems with emergent collective
computational abilities. Proceedings of the National Academy of Sciences of
the United States of America, 79(8):2554-2558, 1988.
[54] D. F. Llorca I. P. Alonso and M. A. Sotelo. Combination of feature extraction
methods for svm pedestrian detection. IEEE Transactions on Intelligent
Transportation Systems, 8(2):292-307, 2007.
[55] Unimation Inc. Unimate Puma 700 robot Volume 1: Technical Manual, Ver
sion 2.0. Danbury, 1986.
[56] Wang J. Optimal estimation of 3d relative position and orientation for robot
control. M.A.Sc. dissertation, Dept. Electrical and Computer Engineering,
Univ. Waterloo, Canada, 1992.
124
[57] A. Bernardino J. Melo, A. Naftel and J. Santos-Victor. Detection and classifi
cation of highway lanes using vehicle motion trajectories. IEEE Transactions
on Intelligent Transportation Systems, 7(2):188-200, 2006.
[58] A. Tabb J. Park and A. C. Kak. Hierarchical data structure for real-time
background subtraction. In Proceedings of the International Conference on
Image processing, pages 1849-1852, 2006.
[59] D. Gao J. Zhou and D. Zhang. Moving vehicle detection for automatic traffic
monitoring. IEEE Transactions on Vehicular Technology, 56(1):51—59, 2007.
[60] R. C. Jain and H. H. Nagel. On the analysis of accumulative difference
pictures from image sequences of real world scenes. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 1(2):206—213, 1979.
[61] I. Horiba K. Suzuki and N. Sugie. Fast connected-component labeling based
on sequential local operations in the course of forward raster scan followed by
backward raster scan. In Proceedings of the IEEE International Conference
on Pattern Recognition. 2:434-437, 2000.
[62] K. Konolige. Small vision systems: hardware and implementation. The 8th
International Sysmposium on Robotics Research, pages 203-212, October,
1997.
[63] D. Kragic and H. Christensen. Survey on visual servoing for manipulation.
Technical Report ISRN, Department of Numerical Analysis and Computing
Science, Sweden, 2001.
[64] D. Kragic and H.I. Christensen. A framework for visual servoing tasks. In
telligent Autonomous Systems, 6:835-842, Italy, 2000.
[65] I. Kukenys and B. McCane. Classifier cascades for support vector machines.
In Proceedings of the International Conference Image and Vision Computing,
125
pages 1-6, New Zealand, 2008.
[66] Z. Liu L. Chen, J. Zhou and W. Chen. A skin detector based on neural
network. In Proceedings of the IEEE International Conference on Commu
nications, Circuits and Systems and West Sino Expositions, 1:615-619, 2002.
[67] J.C Latombe. Robots Motion Planning. Springer, 1991.
[68] H. J. Lee and M. C. Lee. Color-based visual servoing of a mobile manipulator
with stereo vision. The International Federation of Automatic Control, Korea.
July, 2008.
[69] J. Li and S. Chin-Chua. Transductive inference for color-based particle filter
tracking. In Proceedings of the IEEE International Conference on Image
Processing, 3:949-952, 2003.
[70] Z. Liang and C. E. Thorpe. Stereo and neural network-based pedestrian de
tection. IEEE Transactions on Intelligent Transportation Systems, 1(3) :148—
154, 2000.
[71] Daniel Liberzon. Switching in systems and control. Birkhauser Boston, 2003.
[72] Ficocelli M. and Janabi-Sharifi. Adaptive filtering for pose estimation in
visual servoing. Int. Conf. On Intelligent Robots and Systems, pages 19-24,
Hawwaii, 2001.
[73] J. Denzler M. Zobel and H. Niemann. Entropy based camera control for
visual object tracking. In Proceedings of the IEEE International Conference
on Image Processing, 3:901-904, 2002.
[74] E. Makinen and R. Raisamo. Evaluation of gender classification methods
with automatically detected and aligned faces. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 30(3):541-547, 2008.
126
[75] Chaumette F. Malis E. and Boudet S. 2-1/2-d visual servoing. IEEE Trans
action Robotic and Automation, 15:238-250, October, 1999.
[76] D. Marr and T. Poggio. A cooperative computation of stereo-disparity. Sci
ence, 194(4262):283-287, 1990.
[77] P. Martinet and E. Cervera. Real time visual servoing around a complex
object. Proc. IEEE Intl. Conf. on Robotics and Automation, pages 717-722,
Seoul,Korea, May 2001.
[78] K. Nickels and S. Hutchinson. Weighting observations: the use of kinematic
models in object tracking. In Proceedings of the IEEE International Confer
ence on Robotics and Automation, 2:1677-1682, 1998.
[79] Ono M. Ogawa H. and MAsukake Y. Model following adaptive control based
on least squares method. Control, Automation and Systems, ICCAS, pages
638-641, 2008.
[80] Ioanou P. and J. Sun. Robust Adaptive Control. Prentice-Hall, 1996.
[81] Viola P. and Jones M. Rapid object detection using a boosted cascade of
simple features. In IEEE Computer Vision and Pattern Recognition, 1:511—
518, 2001.
[82] S. L. Phung P. Bouttefroy, A. Bouzerdoum and A. Beghdadi. Vehicle tracking
by non-drifting mean-shift using projective kalman filter. In Proceedings of
the IEEE Conference on Intelligent Transportation Systems, pages 61-66,
2008.
[83] N. Papanikolopoulos and C. Smith. Computer vision issues during eye-in-
hand robotic tasks. In Proc. IEEE Intl. Conf. on Robotics and Automation,
volume 3:2989-2994, 1995.
127
[84] A.P. del Pobil P.J. Sanz and J.M. Inesta. Vision-guided grasping of unknown
objects for service robots. In Proc. IEEE Intl. Conf. on Robotics and Au
tomation, pages 3018-3025, 1998.
[85] B.H Yoshimi P.K. Allen, A. Timcenko and P. Michelman. Automatic tracking
and grasping of a moving object with a robotic hand-eye system. IEEE
Transactions on Robotics and Automation, 9(2):152—165, April 1993.
[86] Macmillan Publishers. The macquarie dictionary, 2005.
[87] F. Dornaika R. Horaud and B. Espiau. Visually guided grasping. IEEE
Transactions on Robotics and Automation, 14(4):525—532, August, 1998.
[88] F. Perez-Cruz R. Santiago-Mozos, J. M. Leiva-Murillo and A. Artes Ro
driguez. Supervised-pca and svm classifiers for object detection in infrared
images. In Proceedings of the IEEE Conference on Advanced Video and Sig
nal Based Surveillance, pages 122-127, 2003.
[89] Domenico Ribatti. Sir frank macfarlane burnet and the clonal selection theory
of antibody formation. Clinical and Experimental Medicine, 9:253-258, 2009.
[90] H. L. Ribeiro and A. Gonzaga. Hand image segmentation in video sequence
by gmm: a comparative analysis. In Proceedings of the Brazilian Symposium
on Computer Graphics and Image Processing, pages 357-364, 2006.
[91] A. Rizzi and D. Koditschek. Preliminary experiments in spatial robot
juggling. Proc. 2nd International Symposium on Experimental Robotics,
190:282-298, Toulouse, France, June 1991.
[92] F. Rosenblatt. The perceptron: A probabilistic model for information storage
and organization in the brain, 1958.
[93] M. C. Shin S. Jayaram, S. Schmugge and L. V. Tsap. Effect of colorspace
transformation, the illuminance component, and color modeling on skin de
128
tection. In Proceedings of the IEEE Conference on Computer Vision and
Pattern Recognition, 2:813-818, 2004.
[94] A. Bouzerdoum S. L. Phung and D. Chai. Skin segmentation using color
pixel classification: analysis and comparison. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 27(1): 148-154. 2005.
[95] J. W. Davis S. S. Intille and A. F. Bobick. Real-time closed-world tracking.
In Proceedings of the IEEE Conference on Computer Vision and Pattern
Recognition, pages 697-703, 1997.
[96] V. Salari and I. K. Sethi. Feature point correspondence in the presence of
occlusion. IEEE Transactions on Pattern Analysis and Machine Intelligence,
12(1):87—91, 1990.
[97] Sang-Hyun Nam Sang Shin and Hyun Geun Yu. Conveyor visual tracking us
ing robot vision. FCRAR Florida Conference on Recent Advances in Robotics,
2006.
[98] Shankar Sastry and Marc Bodson. Adaptive Control: Stability, Converge and
Robustness. Prentice-Hall, 1994.
[99] I. J. Schoenberg. Contribution to the problem of approximation of equidistant
data by analytic function. Quarterly of Applied Mathematics, pages 45-99,
1946.
[100] Y. Shirai and H. Inoue. Guiding a robot by visual feedback in assembling
tasks. Pattern Recognition, 5:99-108, 1973.
[101] G.D. Hager S.Hutchinson and P.I. Corke. A tutorial on visual servo control.
IEEE Transactions on Robotics and Automation, 12:651-670, October 1996.
[102] Jean-Jacques Slotine and Weiping Li. On the adaptive control of robot ma
nipulators. IEEE Int. Conf. Robotics And Automation, 1986.
129
[103] Jeffrey Spooner. Stable adaptive control and estimation for nonlinear systems.
John Wiley and Sons, 2002.
[104] Tanev T. and Stoyanov B. On performance indexes fo robot manipulators.
Problems of enfineering cybernetics and robotics, 2000.
[105] Yoshikawa T. Manipulability of robotics mechanisms. Int. Journal of
Robotics Research, Vol. 4, pages 3-9, 1985.
[106] M. Lu T. Ying-Li and A. Hampapur. Robust and efficient foreground analysis
for real-time video surveillance. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition, 1:1182-1187, 2005.
[107] R.Y. Tsai and R.K. Lenz. Techniques for calibration of the factor and image
center for high accuracy 3d machine vision. IEEE Trans. Pattern Analysis
and Machine Intell, 10:713-720, 1988.
[108] M. Unser. Splines: a perfect fit for signal and image processing. IEEE Signal
Processing Magazine, 16(6):22-38, 1999.
[109] B. Siciliano V. Lippiello and L. Villani. Eye-in-hand/ eye-to-hand multi-
camera visual servoing. IEEE Conference on Decision and Control, Spain,
December, 2005.
[110] P. Vadakkepat and L. Jing. Improved particle filter in sensor fusion for track
ing randomly moving object. IEEE Transactions on Instrumentation and
Measurement, 55(5):1823-1832, 2006.
[111] N. V. Vladimir. The nature of statistical learning theory, 1995.
[112] D. M. Weber and D. P. Casasent. Quadratic gabor filters for object detection.
IEEE Transactions on Image Processing, 10(2):218-230, 2001.
[113] W. wilson. Visual servo control of robots using kalman filter estimates of
130
robot pose relative to work-pieces. In K. Hashimoto, editor, Visual Servoing,
pages 71-104, 1994.
[114] Williams Hulls Wilson W.J. and Janabi-Sharifi. Robust image processing
and position-based visual servoing. Robust Vision for Vision-Based Control
of Motion, IEEE Press, pages 163-201, 2000.
[115] L. Xingzhi and S. M. Bhandarkar. Multiple object tracking using elastic
matching. In Proceedings of the IEEE Conference on Advanced Video and
Signal Based Surveillance, pages 123-128, 2005.
[116] N. Vaswani Y. Rathi and A. Tannenbaum. A generic framework for tracking
using particle filter with dynamic shape prior. IEEE Transactions on Image
Processing, 16(5): 1370-1382, 2007.
[117] B.H. Yoshimi and P.K. Allen. Vision control grasping and manipulation
tasks. In Proc. IEEE Intl. Conf. on Multisensor Fusion and Integration of
Intelligence Systems, pages 575-582, 1994.
[118] J.S. Yuan. A general photogrammetric method for determining object posi
tion and orientation. IEEE Trans. Robotic and Automation, 5:129-142, 1989.
[119] T. Zhao and R. Nevatia. Tracking multiple humans in complex situa
tions. IEEE Transactions on Pattern Analysis and Machine Intelligence,
26(9): 1208-1221, 2004.
[120] D. Zhou and H. Zhang. Modified gmm background modeling and optical flow
for detection of moving objects. In Proceedings of the IEEE International
Conference on Systems, 3:2224-2229, 2005.
[121] Jun Zhou and Christopher M. Clark. Autonomous fish tracking by rov using
monocular camera. Canadian Conference on Computer and Robot Vision,
2006.
131
Appendix A
Definitions
Norm
The norm \x\ of a vector a; is a real valued function with the follow properties:
- |a;| > 0 with |a;| if and only if x = 0
- |aa;| = |a| |x| for any scalar a
- I# + y\ < M + M (triangle inequality, this shows that norms are continuous
functions).
Induced norm
The induced norm ||AJ| of a matrix A e JJmXn is define by
|| A|| = sup W and satisfies the next properties: I/O 11
- \Ax\ < P|| |x|
- \\A + f?|| < ||i4|| + ||S||
- ||AB|| < ||i4|| ||5||.
Function norm
The Cp norm for a function is define as
for p € [1, oo) and ||a;|| exists when is finite.
Equilibrium point
x * is an equilibrium point of a system x = f ( x , t ) and x ( t 0 ) = x 0 if f { x * , t ) = 0 for
all t > 0.
132
Stable point (in the Lyapunov sense)
The equilibrium point x * is stable if for arbitraty t o and e > 0 there exist a 5 ( e , t 0 )
s u c h t h a t i f | x ( t o ) | < < K M o ) , t h e n j x ( i ) | < e f o r a l l t > t o .
Attractive point
The point x = 0 is attractive if for all t o > 0 there exists 8 ( t o ) such that |x0| < S
then lim^oo |x(i)| = 0.
Asymptotic stability
The equilibrium point x = 0 is an asymptotically stable equilibrium point of the
system x = f(x, t) if
- x = 0 is a stable equilibrium point.
- x = 0 is attractive.
Lipschitz continuity
A function f ( x , t ) is Lipschitz continuous in x , if for some h > 0, there exists L > 0
such that \f(xi, t) - f(x2, t)\> L\xi~ x2\ for all xi,x2e B{0, t), where B(0, h) is
the ball of radius h centered at 0. The constant L is called the Lipschitz constant.
Uniformly continuous function
A function f ( x ) is said to be uniformly continuous if, for any e > 0, there exists
6 > 0 such that |r — s| < 6 implies |/(r) - /(s)| < e.
Positive Definite Functions
If V ( x , t ) is a positive definite function if V"(0) = 0 and there exists a continuous,
non-decreasing scalar function a(x) such that a(0) = 0 and Vx ^ 0, 0 < Q(||X'||) <
V ( x , t ) .
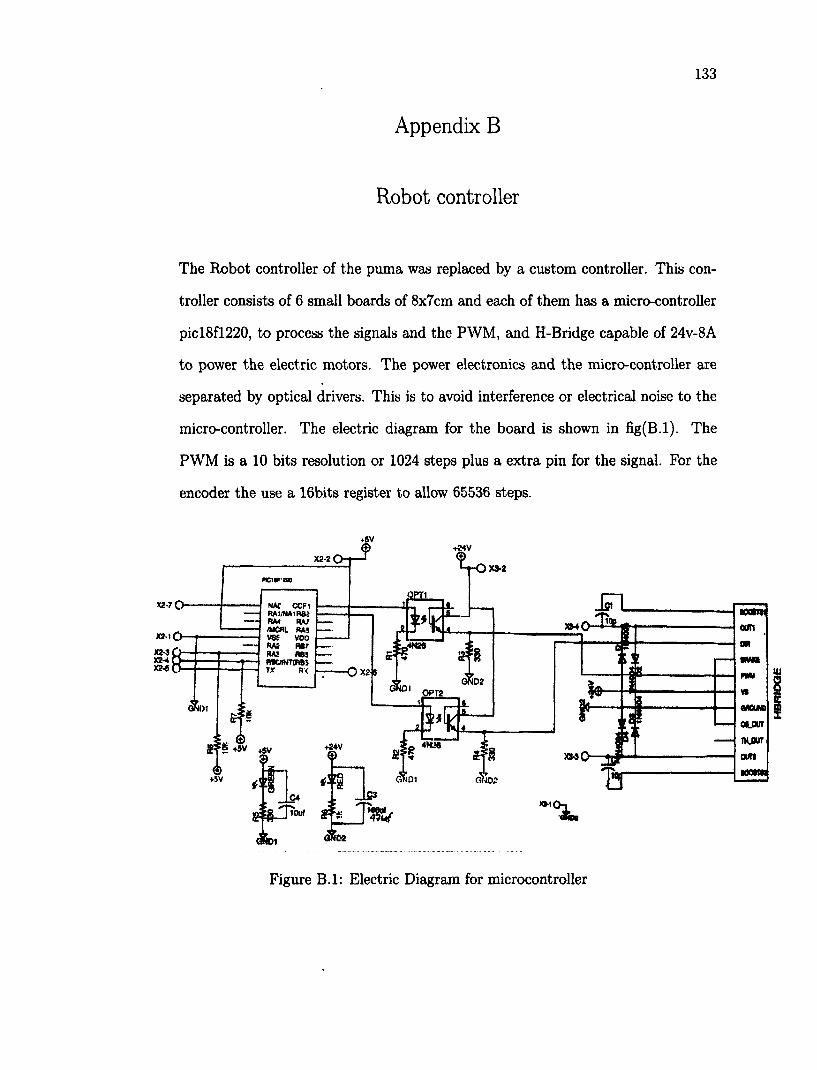
133
Appendix B
Robot controller
The Robot controller of the puma was replaced by a custom controller. This con
troller consists of 6 small boards of 8x7cm and each of them has a micro-controller
picl8fl220, to process the signals and the PWM, and H-Bridge capable of 24v-8A
to power the electric motors. The power electronics and the micro-controller are
separated by optical drivers. This is to avoid interference or electrical noise to the
micro-controller. The electric diagram for the board is shown in fig(B.l). The
PWM is a 10 bits resolution or 1024 steps plus a extra pin for the signal. For the
encoder the use a 16bits register to allow 65536 steps.
+5V
nci«F-ae
MAC CCF1 RAt/NAtRB2
/MCRl RAS VS5 VOO
RAS RS) RBCANTOBS
GND
m
GMD2
Figure B.l: Electric Diagram for microcontroller
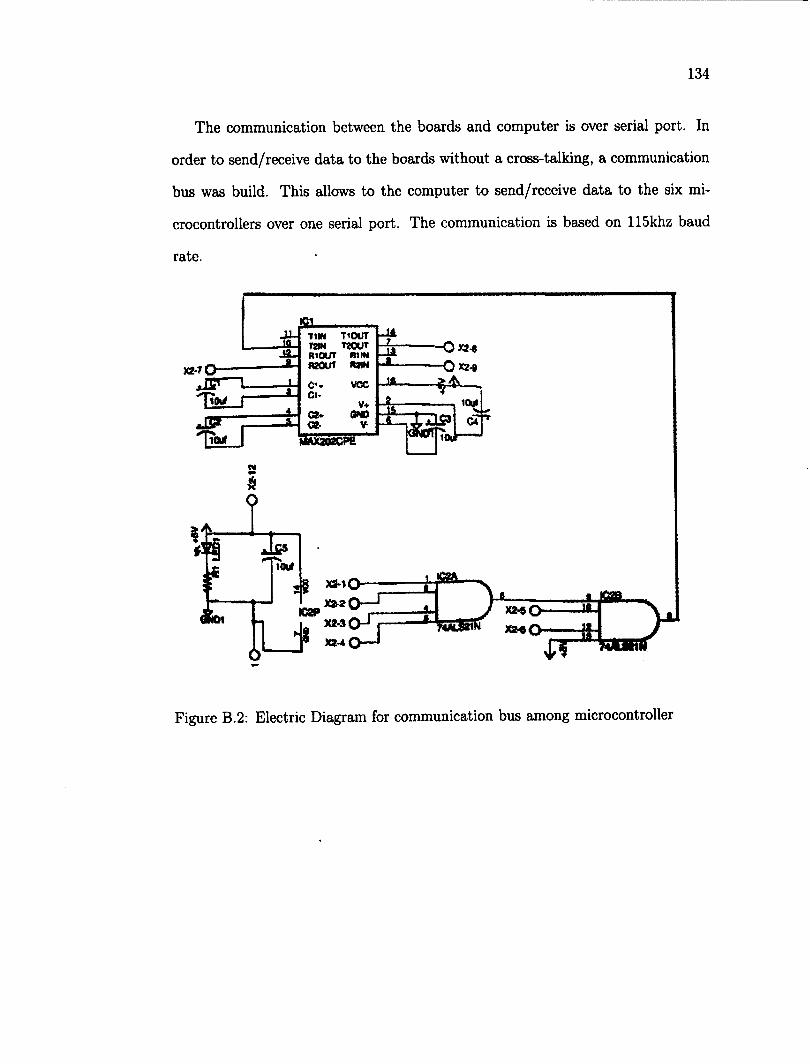
134
The communication between the boards and computer is over serial port. In
order to send/receive data to the boards without a cross-talking, a communication
bus was build. This allows to the computer to send/receive data to the six mi
crocontrollers over one serial port. The communication is based on 115khz baud
rate.
vcc
Figure B.2: Electric Diagram for communication bus among microcontroller
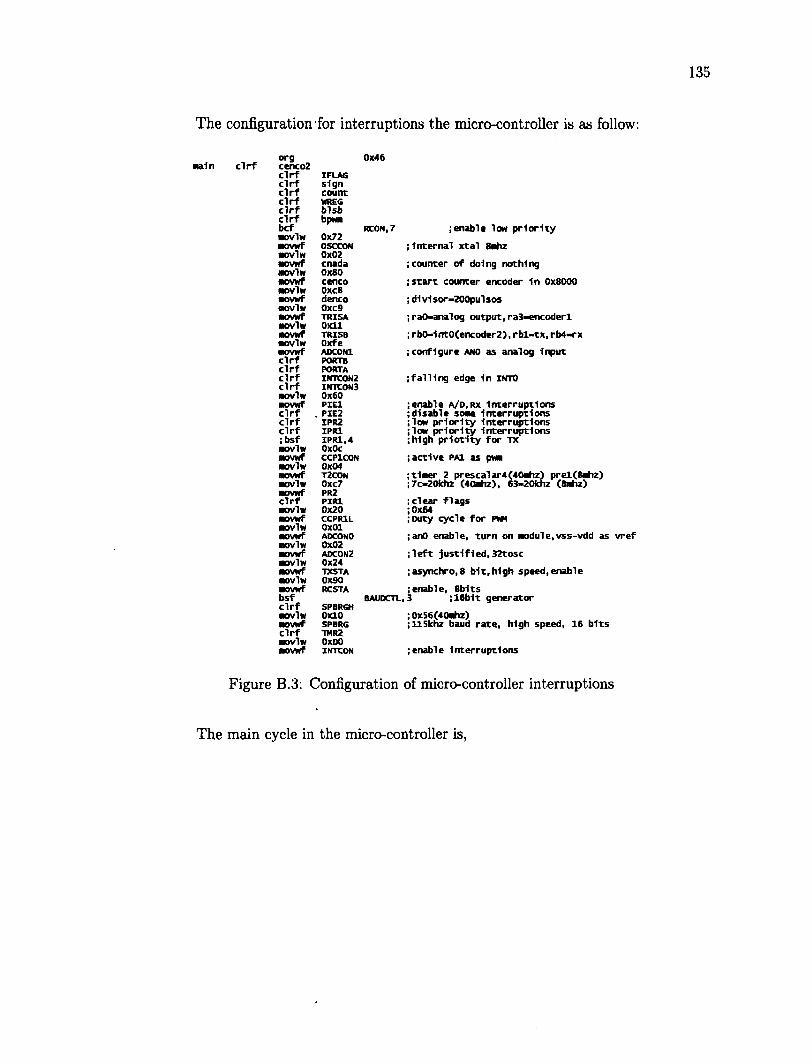
The configuration for interruptions the micro-controller is as follow:
•aln clrf org cenco2 clrf IFLAG clrf sign clrf count clrf WREG clrf blsb clrf bpwn bcf
bpwn
aovlw 0x72 •ovwf OSCCON •ovlw 0x02 •ovwf cnada •ovlw 0x80 •ovwf cenco •ovlw 0xc8 •ovwf denco •ovlw 0xc9 •ovwf TRISA •ovlw Oxll •ovwf TRISB •ovlw Oxfe •ovwf AOCON1 clrf PORTB clrf PORTA clrf XNTCON2 clrf INTCON3 •ovlw 0x60 •ovwf PIE1 clrf . PIE2 clrf IPR2 clrf IPR1 ;bsf IPRl,4 •ovlw 0x0c •ovwf CCP1CON •ovlw 0x04 •ovwf T2CON •ovlw 0xc7 •ovwf PR2 clrf PIR1 •ovlw 0x20 •ovwf CCPR1L •ovlw 0x01 •ovwf ADCONO •ovlw 0X02 •ovwf ADCON2 •ovlw 0x24 •ovwf TXSTA •ovlw 0X90 •ovwf RCSTA bsf clrf SPBRGH •ovlw 0x10 •ovwf SPBRG clrf TMR2 •ovlw OxDO •ovwf INTCON
0x46
rc0n.7
BAUDCTL
;enable low priority
; Internal xtal 8ahz
;counter of doing nothing
;start counter encoder 1n 0x8000
;d1vlsor-200pulsos
;raO»analog output,ra3-encoderl
i rbO-1ntO(encoder2), rbl-tx,rb4-rx
;configure ano as analog Input
;fal!1ng edge 1n iktO
;enable a/d, rx Interruptions ;disable sone Interruptions ;low priority Interruptions :low priority Interruptions ;h1gh prlotlty for TX
;active PA1 as pwa
;t1aer 2 prescalar4(40ahz) prel(Sahz) ;7c-20khz (40ahz), 63-20khz (Sahz)
iclear flags ;0x64 ;Duty cycle for pwm
;anO enable, turn on Module,vss-vdd as vref
;left justified,32tosc
;asynchro,8 bit,high speed,enable
;enable, 8b1ts ,3 ;16Mt generator
;0x56(40ahz) ;115khz baud rate, high speed, 16 bits
;enable Interruptions
Figure B.3: Configuration of micro-controller interruptions
The main cycle in the micro-controller is,
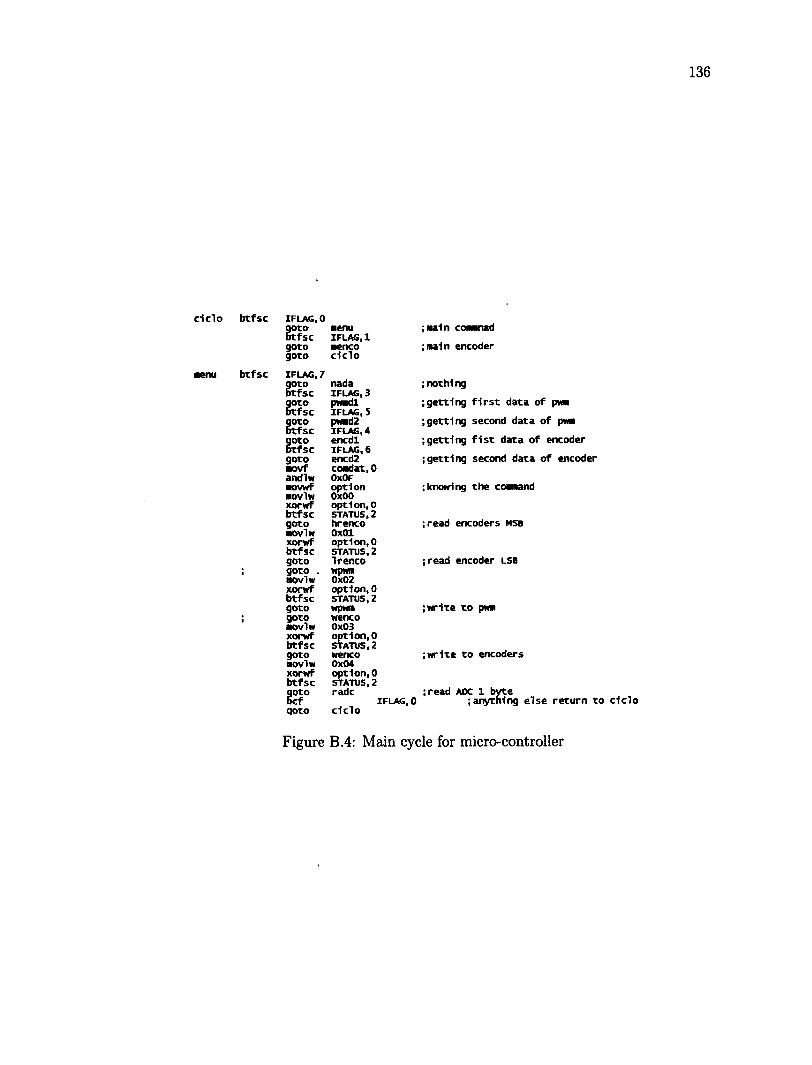
136
dclo btfsc
btfsc
iflag.o goto aenu btfsc IFLAG, 1 goto aenco goto dclo
IFLAG,7 goto Btfsc goto btfsc goto Btfsc goto Btfsc goto aovf andlw aovwf •ovlw xorwf btfsc goto •ovlw xorwf btfsc goto goto . •ovlw xorwf btfsc goto goto •ovlw xorwf btfsc goto •ovlw xorwf btfsc
goto cf
qoto
nada IFLAG,3 pwadl IFLAG, 5 |>mkI2 IFLAG, 4 encdl IFLAG, 6 ericd2 coadat,0 OxOF option 0x00 option,0 STATUS,2
hrenco 0x01 option,0 STATUS,2 Irenco
0x02 option,0 STATUS,2 wpwn wenco 0x03 option, 0 STATUS,2 wenco 0x04 option, 0 STATUS,2 radc
;aa1n coaanad
;aa1n encoder
; nothing
;getting first data of pwa
;getting second data of pwa
;getting fist data of encoder
;getting second data of encoder
;knowing the coaaand
;read encoders MSB
;read encoder LSB
;write to pwa
;write to encoders
clclo
;read ADC 1 byte IFLAG.O ;anything else return to clclo
Figure B.4: Main cycle for micro-controller

137
Appendix C
Software Functions
C.l Robotic Interface Functions
PumaOpenQ
Open a serial communication.
PumaClear()
Clear the serial Buffer communication.
PumaRead(IN nlink,OUT encoder)
Read the encoder of the link given by nlink.
Pumawrite(IN nlink, IN value)
Write a voltage (value) in the link given by nlink.
Mousecontrol(In rectangle, IN active, IN gripper)
This function receives the area (rectangle) where the mouse can be activated. The
push down the mouse send a signal to toggle the active value to 1 otherwise the
value is 0. The end effector can be maintain automatically in a 90 degrees or a 0
degrees depending of the gripper value.
C.2 Image Processing Functions
FB_Init()
Initialize the framegrabber to be ready for use.
FB_Cleanup()
138
Clean the framegrabber buffer.
FB_SetVideoConfig(int a,int al,int a2,int a3)
Configures the framegrabber: a=type, al=standard, a2=source, a3=greensync.
FB_VideoOfFscreen(int a,int b,int c,int d)
Configure camera type: a=pixel width, b=pixel height, c=pixel depth, c=start.
Corner (IN ROI)
This is a corner detection function using the Harris corner detection method. It
returns a vector of points where corners where detected over the ROI.
Edge(IN image, IN rectagle, IN flag, IN threshold, OUT matrix)
Return a matrix with 255's (black) in the edge detected in the rectangle otherwise
O's (white). The flag=l returns the edge detected in the matrix or flag=0 in over
write the same image.
Crosscorr(IN feature a, IN featureb)
Return the normalized crosscorrelation between two templates.
bhatta(IN feature a, IN feature b)
Return the geometric Bhattacharyya distance between two histograms.
hiscoi(IN image)
Histogram receive and image returns vector with 15 bins.
Filtering(IN image, IN rectangle, IN matrixk, IN flag, OUT matrixout)
Filtering applies the matrix kernel (matrixk) to the image in the area given by the
points of the rectangle. The flag indicates to return the result in the initial image
or to return the result in the matrixout.
BackSub(IN imagel, IN image2,IN threshold, OUT image3)
Background subtraction function subtracts image2 from imagel and return the re
sult in image3. If the pixel is within the threshold the result is 0.
IntegralImg(IN image, IN rectangle, OUT matrix)
139
Integral Image return a matrix of the summed area given by the rectangle over the
image.
CameraCal(IN vectorl, IN vector2, OUT vector3)
Camera calibration function returns a vector with intrinsic and extrinsic parame
ters of the camera. The inputs are the vector of pixel coordinates and a vector of
their positions.
C.3 Matrix Functions
Matrix(IN c, IN r)
Creates a matrix with c columns and r rows.
! Matrix
Returns the matrix transpose.
Matrix.eye(IN v)
Create a diagonal matrix with value v.
Matrix.DetQ
Returns the determinant of the matrix.
Matrix.Inv()
Returns the inverse of the matrix.
Matrix.Norm()
Returns the Frobenius norm of the matrix
Matrix.Print()
Print the matrix elements.
Matrix.SetRow(IN r,IN vec)
Set the row r with a vector vec .
Matrix.SetCol(IN c, IN vec)
140
Set the column c with a vector vec.
Matrix operators (+,-»T)
+,->V are the arithmetic operators.
C.4 Main Object Classes
C.4.1 Class Puma Interface
public class Rcomm{
SerialPort port;
byte[] bout-new byte[l];
byte[] bin-new byte[l];
int encoder;
public Rcoon(){
port-new SerialPort("C0M1",115200.Parity.None,8.StopBits.One);
port.ReadTimeout-500;
>
public void PwritePWM(int link,int valueH
bout[0]-(byte)(Clink « 4) +2);
port.Vrite(bout,0,1);
if(value<»0){
value—value;
if(value>900)
value-900;
bout[0]-(byte)(value » 2);
port.Write(bout,0,1);
bout [0]-(byte)(value t 3);
port.Write(bout,0,1);
>
else{
if(value>900)
value-900;
bout[0]-(byte)(value » 2);
port.Write(bout,0,1);
bout[0]-(byte)((value t 3) 14);
port.Write(bout,0,1);
>
public lnt PreadEncCint llnkH
bout[0]»(bytB>(16*link);
port.Write(bout,0,1);
port.Read(bin,0,1);
encoder • bin[0] « 8;
bout[0] » (byte)(bout [0]+1);
port.Write(bout,0,1);
port.Read(bin,0,1);
encoder " encoder I binCO];
return encoder;
>
public void PvriteEncdnt link,lnt value){
bout[0]»(byte)(16*link+3);
port.Write(bout,0,1);
bout[0]"(byte)(value » 8);
port.Write(bout,0,1);
bout[0]«(byte)(value 4 0x001f);
port.Write(bout,0,1);
>
public void Popen(H
port.Open();
>
public void Pclose(){
port.Close0;
>
public void Pclean(){
port.ReadExi sting();
port .DiscardlnBufferO;
port.DiscardOutBuffer0;
>
C.4.2 Class Matrix Code
public class Hatrix
public int Row,Col;
private float[] matrix;
public Matrix(int a, int b){
Row-a;
Col-b;
matrix-new float[a*b];
public float this [int x, int y]{
get { return matrix[x»Col+y]; >
set { matrix[x*Col+y] » value; >
>
public static Matrix operator +(Matrix matl, Matrix mat2){
Matrix nMatrix • new Matrix(matl.Row,matl.Col);
for (int x«0; x < mat1.Row; x++)
for (int y»0; y < mat1.Col; y++)
nMatrix[x,y] • matl[x, y ] + mat2[x, y ] ;
return nMatrix;
>
public static Matrix operator -(Matrix matl, Matrix mat2){
Matrix nMatrix * new Matrix(matl.Row,matl.Col);
for (int x-0; x < matl.Row; x++)
for (int y"0; y < matl.Col; y++)
nMatrix[x, y] - matl[x, y] - mat2[x, y];
return nMatrix;
>
public static Matrix operator *(Matrix matl.Matrix mat2){
if (matl.Col !• mat2.Row)
throw new InvalidOperationException("incompatible dimensions");
Matrix nMatrix • new Matrix(matl.Row,mat2.Col);
float temp;
int tel,te2;
for(int j»0; J<matl.Row; j++)
for (int x«0; x<mat2.Col; x++){
temp«0f;
tel-j*matl.Col;
te2"j*mat2.Col;
for (int y«matl.Col-l; y >»0; y—) //xor checking for faster loop
temp +• matl.matrix[tel+y] • mat2[y,x];
nMatrix.matrix[te2+x]"temp;
>
return nMatrix;
>
public static Matrix operator *(float a,Matrix matl){
Matrix nMatrix « new Matrix(matl.Row,mati.Col);
for (int x»0; x < matl.Col; x++)
for (int y-matl.Row-1; y >"0; y—)
nMatrix [y, x] • a * matlCy, x];
return nMatrix;
>
public static Matrix operator *(Matrix matl,float a){
Matrix nMatrix « new Matrix(matl.Ron,matl.Col);
for (int x«0; x < matl.Col; x++)
for (int yaatl.Rov-1; y >"0 ; y—)
nMatrix[y, x] » a * matlCy, x];
return nMatrix;
>
public static Matrix operator /(Matrix matl,float a){
Matrix nMatrix - new Matrix(matl.Row,matl.Col);
a-lf/a;
for (int x»0; x < matl.Col; x++)
for (int y-matl.Rov-1; y >"0 ; y—)
nMatrix[y, x] - a * matl[y, x];
return nMatrix;
>
public static Matrix operator ! (Matrix matlH
Matrix nMatrix • new Matrix(matl.Col,matl.Row);
for (int x-0; x < matl.Row; x++)
for (int y»0; y < matl.Col; y++)
nMatrix[y,.x] • matl[x, y];
return nMatrix;
public void eye(float n){
int tel;
for (int x»0; x < Row; x++H
tel«x»Col;
for (int y»0; y < Col; y++){
lf(x--y)
matrix[tel+y]»n;
else
matrix[tel+y]"Of;
>
>
>
public void SetColdnt y,Matrix a){
for(int i"0;i<Row;i++)
thls[l,y]«a.matrix[i];
public void SetRovdnt x,Matrix a){
int tel;
tel-x*Col;
for(int i"0;i<Col;i++)
oatrix[tel+i]"a.matrix[i];
h public Matrix GetColdnt y){
Matrix nMatrix»new Matrix(RoH,l);
for(int i»0;i<Row;i++)
nMatrix.matrix[i]'this[i,y];
return nMatrix;
>
public Matrix GetRowdnt x){
Matrix nMatrix-new Matrix(1,Col);
fordnt i"0; KCol; i++)
nM&trix.matrix[1]"this[x,i];
return nMatrix;
>
int UpTriang(){
Matrix matl»new Matrix(Row,1);
int sign»l,tel,te2;
float temp;
fordnt i"0; KRow-l; i++){
if (this [i, i]•this[i,i]<-.OOOOif){
matl>GetRow(i);
SetRov(i,GetRow(i+l));
SetRov(i+i,matl);
sign *—1;
>
fordnt j»i+i; j<Rov; j++H
temp-this CJ,i]/this[i,i];
tel"i*Col;
te2»j*Col;
fordnt k«0;k<Col;k++)
matrix[te2+k] -» temp*matrix[tel+k];
>
>
return sign;
>
void Gauss(M
Matrix matl-new Matrix(Row,1);
float temp;
int tel,te2;
fordnt i«0;i<Rov;i++){
tel»i*Col;
if(matrix[tel+i]'matrix[tel+i]<-.00001f){
matl"GetRow(i);
SetRow(i,GetRow(i+l));
SetRow(i+l,matl);
>
temp»matrixd*Col+i];
tel"i*Col;
fordnt k-0;k<Col;k++)
matrix[tel+k] /« temp;
fordnt j-0;j<Row;j++){
if(J!"i){
temp*matrix[j *Col+i];
tel»j*Col;
te2"i»Col;
for(lnt k-0;k<Col;k++)
matrix[tel+k] -• temp*matrix[te2+k];
>
}
>
>
public float DetO{
Matrix matl-new Matrix(Row,Col)j
int sign;
for(lnt i»0;i<Row;i++)
mat 1.SetRow(i,GetRow(i));
sign*matl .UpTriangO;
float temp"l.Of;
for(int l-0;i<Rov;i++)
temp *» matl [1,1];
return temp*sign;
>
public static Matrix operator/(Matrix matl,Matrix mat2){
Matrix mat3-nev Matrix(matl.Row,matl.Col+1) ;
Matrix mat4"nsw MatrixOnatl.Rov.l);
//Augmented matrix
for (int i»0; Kmatl .Col; i++)
mat3 .SetCoKi ,matl .GetCol(i)) ;
mat3.SetCol(matl.Col,mat2);
//Gauss Elimination
mat3.GaussO;
for (int 1-0; Kmatl. Col ;i++)
mat4[1,0]"mat3[i,matl.Col];
return mat4;
>
public Matrix InvO
{
Matrix matl-neu Matrix(Row,Col);
matl.eye(lf);
Matrix mat2«new Matrix(Row,Col*2);
for(int i»0;i<Col;i++)
{ mat2.SetCol(i,GetCol(i));
mat2.S8tCol(i+Col,matl.GetCol(i));
>
mat2.GaussO;
//Return the last columns
for(int i-0;i<Col;i++)
matl.SetCol(i,mat2.GetCol(i+Col));
return matl;
>
public float Norm(M
float temp-Of;
if (Col—1H
for(int i-Oji<Rov;i++)
temp +» matrix[i]"matrix[i];
}
if(ftow--l){
for(int i«0;i<Col;i++)
temp +• matrix[i]"matrix[i];
>
temp"(float)Math.Sqrt(temp);
return temp;
>
public void InitMatrix(){
Random rand " new Random();
for (int x-0; x < this.Row; x++)
for (int y-0; y < this.Col; y++)
this[x,y] - (rand.Next()\%100)/100f;
>
public void PrintMatrixC(){
Console.WriteLineO;
for (int x«0; x < Row; x++H
Console.Write("[ ");
for (int y-0; y < Col; y++){
// format the output
Console.Write("{0,6:#,000}", this[x,y]);
>
Console.WriteLine(" ] " );
>
Console.WriteLine();
>
public String PrintMatrixO
{
StringBullder s - new StringBuilderO;
StringBuilder s2 • nev StringBuilderO;
for (int x»0; * < Row; x++){
s.AppendC'C ");
for (int y«0; y < Col; y++){
// format the output
s2.AppendForoat( "{0:0.0000} ",this[x,y]);
}
s.Append(s2);
s.Append(" ]\n");
s2.Length-0;
>
return s.ToStringO;
>
C.4.3 Class Feature Code
public class Feature{
public int px,py;
public float nean.std;
public float[] fnorm-new float[25*25]; //template of 25*25
public int[] hcolor-nev int[15]; //histogram with 15 bins
private int aux2,cot;
public Feature(int x.int y){
px"x;
py-y; mean"0f;
std-Of;
forUnt i-0;i<15;i++){
hcolor[i]»0;
>
>
public void paranCref byte[] tempH
int i,J;
int x,aux,ptested;
float sum;
ptested-py»640+px;
raean-Of;
for( i—12;i<13;i++M
aux«ptested+i*640;
if(aux<307188 tt aux>12)
for <j—12;j<13;j++>
mean+"temp[aux+j];
>
mean-mean/625;
x-0;
sum-Of;
for( i—12;i<13;i++M
aux"ptasted+i*640;
if(aux<307188 tt aux>12)
for (J—12;j<13;J++H
fnorm[x]"temp[aux+J]-mean j
sum+»(fnorm[x]»fnorm[x]);
x++;
>
>
std-(float)Math.Sqrt(sum);
>
public void bistcolCref byta[] tempH
int i.j;
int x,aux,ptested;
ptB8t«d»py»640+px;
for(i-0;i<15;i++)
hcolor[i]"0;
150
for( i«-12;i<13;i++){
aux"pte«ted+i»640;
if(aux<307188 tt aux>12)
for (J—12;j<i3;J++){
x-(int)(temp[aux+j]/17.05f);
hcolor[*]++j
>
>
>
public float crossc(Feature a,Feature b){
float correlation«Of;
float stda«0f,stdb»0f,teapa,tempb;
forCint i«0;i<625;i++H
tempa*a.fnorm[i]-a.mean;
tempb-b.fnorm[i]-b.mean;
corre lat i on+»tempa*tempb;
stda+«(tempa»tempa);
stdb+»(tempb*teinpb);
>
return correlation/((float)Math.Sqrt(stda*stdb));
public float bhatta(Feature a,Feature b){
float sum'Of;
for(int i«0;i<a.hcolor.Length;i++){
sum+»(float)Hath.Sqrt(a.hcolor[i]*b.hcolor[i]);
>
return (float)Math.Sqrt(lf-sum);
>
>

Appendix D
151
Integral Image
In order to improve the processing time required for each feature on multi tar
get tracking, we made use of the concept of integral image. The integral image
representation [81] are also known in graphics as summed area tables. Briefly, the
integral image representation is computed by a running sum image and the features
are computed by linear weighted samples of the integral image. More formally, val
ues ii{u, v) in the integral image sums of all original image pixel-values left of and
above (u,v):
Then, the sum of pixels within rectangle D can be obtained using four array
references, Figure D.l. Dsum = n(4) + ii( 1) — (n(2) + n(3)), where «(1) is the
value of the integral image at point 1, i.e., the sum of image values within the
rectangle A. Similarly, the value ii(2) is the sum of values in rectangles A and B,
etc.
Figure D.2 shows a particular example of the Integral image calculation. By
preintegrating the ROI image, we gain a speed up in the calculation of the mean,
that is required in the cross correlation template matching from every sample.
(D.l) k<u,l<v
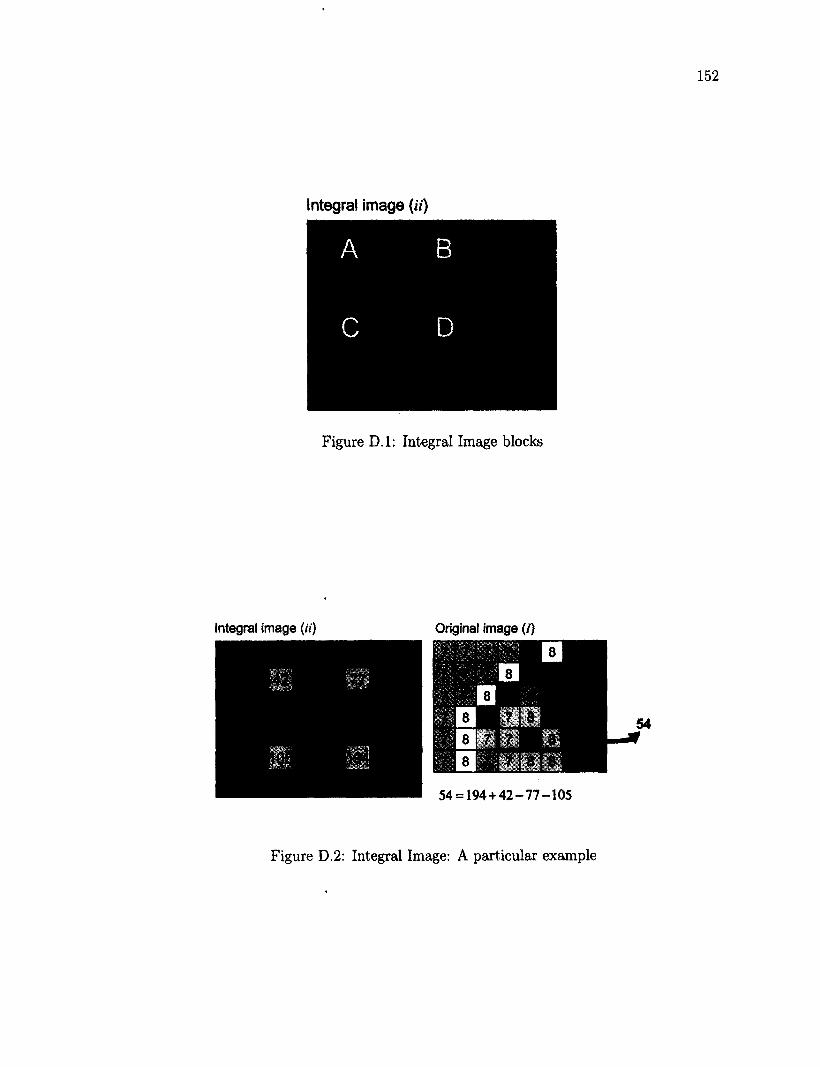
Integral image ( i i )
Figure D.l: Integral Image blocks
Integral image (ii) Original image (I)
54 = 194+42-77-105
Figure D.2: Integral Image: A particular example





























