Embed Size (px)
Citation preview

Math. Meth. in the Appl. Sci. 9 (1987) 413-430 AMS subject classification: 93 B 05, 45 K 05
8 1987 B. G. Teubner Stuttgart
Time Optimal Boundary Controllability of a Simple Linear Viscoelastic Liquid
G. Leugering, Dannstadt
Communicated by P. Hagedorn
A viscoelastic liquid confined between two parallel plates is considered under the action of & (0, oboundary controls. Applying Laplace-Transform-techniques it is shown that & (0, I ) - states are exactly controllable in finite time, depending on the speed of propagation of singu- larities. Finally the existence of time-optimal controls respecting a given norm bound is shown.
1 Introduction
There is recently an intensified interest in the behavior of viscoelastic fluids and in particular in the dependence of wave propagation on consti- tutive material assumptions, see [l], [S], [6 ] . The papers deal with the ma- terial response to step jump inputs applied to the boundary; the physical background is usually referred to the Couette-flow of polymers. In some sense the investigations of such a material response is strongly related to controllability questions which have in turn their own justification. We dis- pense here with surveying the physical background and the procedure leading to the governing equations of motion, we instead refer the reader to [S], [7]. Referring to these papers we venture to formulate the equations without any further comments. Let u ( t , x ) denote the velocity at x of a simple linear viscoelastic fluid confined between parallel plates separated by a distance 1. The fluid is assumed to be isotropic and incompressible with density e and shear relaxation modulus G(t). We assume that the plate x = I remains fixed while the plate at x = 0 is moved in a &-fashion described by a function u E & (0, T). Then the process is governed by
where we have assumed that the shear velocity is zero before the process starts at t = 0. The controllability problem associated with (CP) is then:

414 G. Leugering
given T > 0, uo, u1 e L2 (0, r ) is there a boundary control u E & (0,q such that the corresponding trajectory, u, of(CP)'starts ut u ( 0 ) = uo and terminates at u ( T ) = ul i'
Note that (CP) and (P) could have been framed in the context of heat con- duction with memory effects as well. The point here is that materials of the type described above reveal a hyperbolic character such that the speed of propagation of a discontinuity is finite, e.g. c = v = , if G (0) is. Therefore, unlike in the no-memory case of the heat equation, say, it is natural to conjecture that there is an affirmative answer to (P). The next section is devoted to existence theory where we made extensive use of Nerrain and Joseph's paper [YJ. In section 3 we state our controllability result. In order to keep in the vicinity of [ S ] we do not insist on minimal assumptions on the relaxation kernel G(t) but adapt from [S] :
i) G:[O,a)+IR+ = { x ~ l R J x > 0)
ii) G is strictly monotonically decreasing
iii) G E C[O, 00) n PC' (0, m)(continuous and piecewise continuous
iv) G(t) = O(e-"),l> Oast-m ,
v) - G (t) < Oisstrictly monotonically increasing and
differentiable)
d d t
d lim - G (t) = 0. t-m dt
It is the interest in long time behavior of (CP) that makes assumption (Al) plausible if not necessary; in particular, (Al) holds in case G is a completely monotone kernel. Since we are interested in a finite process time we could have used the semigroup approach by Desch and Grimmer [l], which works for kernels with less restrictive assumptions. In the case of (Al) explicit formulas for the solution can be given by the means of the Laplace-transform technique ( [ S ] ) . The advantage of this approach is the deep insight into both physical and mathematical structure of solutions in the spcial case discussed here. Furthermore, provided with (Al ) we can use energy estimates by Slem- rod [7] to show that the more involved problem of finding a solution of (P) with preassigned norm bound has a solution at least if u1 = 0. This is done in Section 4. The result is strongly related to [4] but with the remarkable difference that no smallness of the relaxation kernel is assumed. Finally, in Section 5 we prove the existence of a time optimal control, u E HA (0, T), 11 u 11 < 17, steering the initial data u o ~ H ~ ( O , I ) to zero in the least time possible. Its characterization, however, remains as an open problem.

Time Optimal Boundary Controllability of a Simple Linear Viscoelastic Liquid 415
2 On solving (CP)
Apply the formal Laplace transform, given by 00
T(s) : = 1 e-"f(t) dt 0
to (CP) with uo (x) = 0; uE HA (0, T).
s ) u (s,x) = esV(s,x) xE(O,I),Re(s) 2 xo > 0 (LCP) {"' -xx
(2.1) { "5
6(s,O) = ii(s),U(s,I) = 0
or equivalently
5 (s,x) = q'(s)D(s,x) o(s,O) = li(s),V(s,I) = 0
with q(s) := v m where we have cut the complex plane along the negative real axis. Then U(s,x) is given by
It is shown in [S], and is indeed well known, that A , implies
argsE [O, 4 2 1
arg s E [0, - 71/21, =5 arg G(s) E [O, 71/2)
* arg G(s)E [O, - x/2)
and furthermore
(2.3) (2.3) shows how (Al) is related to asymptotic stability of (CP). Provided with (2.3) the last term in the last equality of (2.2) can be developed into a uni- formly convergent series
Re s > 0 * Re q(s) > 0 .

416 G. Leugering
t -xx<O t = ax+ = limt t - ax > 0. ‘lax t,x)
y+ime”-e-xlb)ds 1 = .5) v’(t,x):= -
2TC11-*m s
The functionf(t.x) in (2.5) is given by
1 =:y + g(t,x)
with G(iy):= r(y)eiPb)
Furthermore, since at t = ax we have a discontinuity, the inversion gives the mean value, see [S] for details:
. sin (yax - 8 b)) dy .
Renardy has shown in [6] that (2.7) has the simple form
Since G‘(O)/G(O) < 0, (2.8) implies, as has been pointed out in [ S ] , [6], that if u is a unit step input the discontinuity of u(t,x) at t = ax, i.e.f(ax+,x), decays exponentially. In the view of our controllability question we assume for simplicity (but this is not essential for the method)
(A21 G’(0) = 0, G”(0) = 0 .
(A2) impliesj’(ax+,x) = 1 and this in turn
(2.9) g(ax+,x) = 0 .
Now, since u E HA (0, T) (2.4) can be rewritten as
u(s,x) = s~(s)-[e-x~(J) 1 + {e-(X+2l)sb) - e-W-x)~b)] + ... +I. S
Hence, by inversion, if we extend u to (- co, 0) by zero

Time Optimal Boundary Controllability of a Simple Linear Viscoelastic Liquid 41 7
t 00
- f ( s , 2jI - x) H (s - a (2 jI - x))] 1 ds
1 t > O <
is the Heaviside function. whereH(t) =
Since for each finite t > 0 the series in (2.10) contains only a finite number of terms, say N,
(2.11) u ( ~ , x ) = J zi(t-s)f(s,x)ds + C { j ri(t-s)f(s,x+2jl)ds I
a x i-1 a ( x + 2 j / )
I I - u(t-s)f(s,2jI-x)ds , N a l < t < (N+l)a l a ( 2 j l - x )
u ( t , x ) = 0, t < a x .
The representation (2.1 1) of u(t,x) reflects the physical insight of refraction between the plates. See [5], [6] for the physical discussion. Let us first concentrate on small time intervals, i.e. T < al.
I
u ( t , x ) = I u(t-s)f(s,x)ds, t 2 ax
u( t ,x ) = 0, t < a x
a x
Obviously u(t,x) given by (2.12) is continuous in t such that the evaluation of u(t,x) at t = T = a1 makes sense. Now, formally
a 1 (2.13) -u(al,x) = - -au(al-ax) 2 - g(ax,x)ri(al-ax) a x
By (2.9), g(ax+,x) = 0. To make (2.13) rigorous we have to investigate
-g(s,x). This has been done in [YJ if G satisfies (Al). The estimation be-
comes considerably simpler if in addition we have (A2). Then G(u) = G(0) u + O ( U - ~ ) , IuJ -+ co, and by (2.5), (2.6) we find
a ax

418 G. Leugering
c.f. [ 5 ] , (5.20) for the more general case G(0) $: 0, %(O) f 0)
and hence
1 1 2 0 2
ul
(2.15) u(al,O) = -u(al) + lu (a l - s ) -ds = 0
since u E HA (0, r). It is evident from (2.12) that
(2.16) u(al, l) = 0 .
Thus, if we define L,/ u = u(a,l, . ) by (2.12)
we have shown that L,, is linear and bounded. Partial integration respecting U E HA (0, r ) formally gives
I a 0 as
= u (t - s)-~(s,x) H (s - ax)) ds.
By(A2): G(u) = - U
Therefore
Time Optimal Boundary Controllability of a Simple Linear Viscoelastic Liquid 419
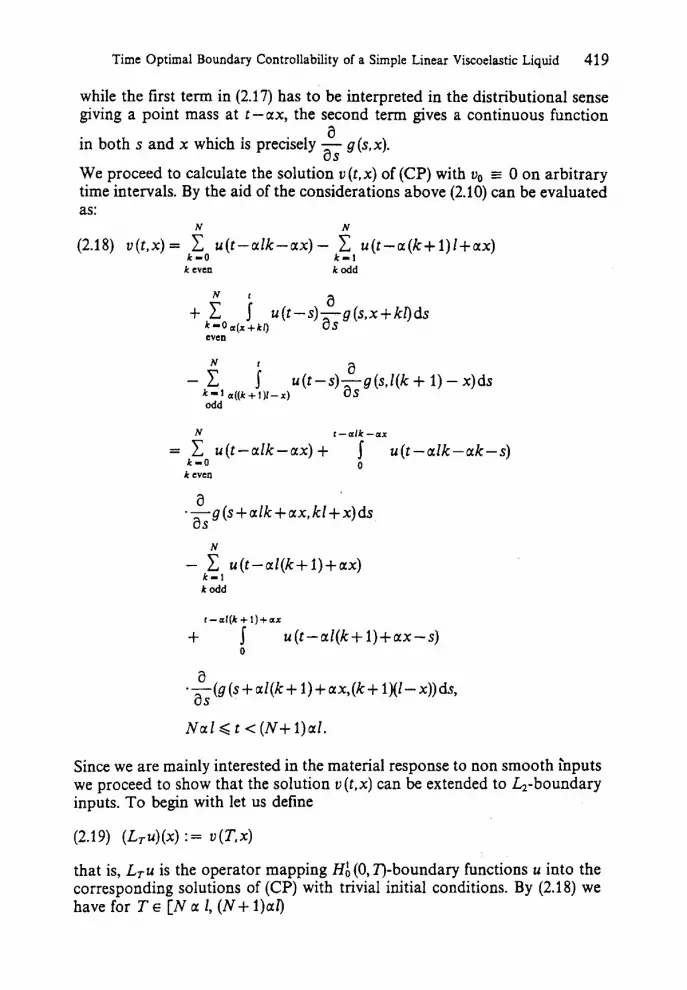
while the first term in (2.17) has to be interpreted in the distributional sense giving a point mass at t-ax, the second term gives a continuous function
in both s and x which is precisely - g(s,x).
We proceed to calculate the solution u ( t , x ) of (CP) with uo = 0 on arbitrary time intervals. By the aid of the considerations above (2.10) can be evaluated as:
(2.18) u(t,x) = 1 u(t-ak-ax) - C u(t-a(k+l)l+ax)
a a s
N N
k - 0 k - 1 k even k odd
a as
N
u(t-s)-g(s ,I(k + 1) - x)ds - C j k - 1 a ( ( k + l ) I - x ) odd
N t - a l k - a x
= C u(t-aorIk-ax)+ 1 u(t-alk-ak-s) k - 0 0
k even
a as
.-g(s +alk+ax,kl+x)ds
N
k - 1 k odd
- C u(t-aI(k+i)+ax)
r - a l ( k + l ) + a x
+ 1 u(t-al(k+l)+ax-s) 0
a as
* - (g (s + aI(k + 1) + ax, (k + 1 ) ( I - x)) ds,
N a l < t < (N+l)al .
Since we are mainly interested in the material response to non smooth inputs we proceed to show that the solution u(t,x) can be extended to &boundary inputs. To begin with let us define
(2.19) (L~-u)(x) := u(T,x)
that is, LTu is the operator mapping HA (0, I)-boundary functions u into the corresponding solutions of (CP) with trivial initial conditions. By (2.18) we have for T E [ N a I, (N+ 1)al)

420 G. hugering
I N T - u l k -ux
< j C lu(T-alk-ax) + j u(T-alk-ax-s) 0 k-0 0
. - g (s + alk+ ax, kl+ x)ds12dx
k even
a a s
T -ul(k + 1 ) + ux
+ J u(T-al(k+l)+ax-s) 0
a a s
---g (s + al(k+ 1)-ax,@+ 1)l-x)ds12dx
1 N T - u l k I
a k - o T - = l ( k + l ) 0
a 1 a s a
. - g (s + T- T,-(T- r))dsI2 dr
a 1 l T a0 0 a s a
l T i T T a 1 a0 a o o as a
T
= -1 lu (5 ) + I u (r - s)-g (s + T- r,-(T- 5))ds l 2 dr
<-Jlu(r)12dr +- . J J I-g(s+T--,-(T-r))l*dsd~
By a Cauchy sequence argument, inequality (2.20) implies that the solution v ( t ,x ) corresponding to u( t ) can be extended to L2-boundary conditions. We have proved:
Lemma 1. Let u E L2 (0, T), T > 0 be given. Then there exists a unique weak solution v ( t , x ) of (CP) with uo = 0 in the following sense: There exists a sequence u, E HA(0,T) converging to u in the L-sense such that the corre- sponding 'mild' sohtion 0, E C' (0, T, & (0,Z)) n C(0, T,H' (0,Z)) converges to v E C(O,T, &(O,Z)). 0 Remark 1. Lemma 1 is analogous to example 1 in [Z], where the elastic string is considered, if one concentrates on the displacement. 0

Time Optimal Boundary Controllability of a Simple Linear Viscoelastic Liquid 421
Now we concentrate on the initial value problem (CP) with homogeneous boundary data. Let us first consider the problem (CP) where the distance between the plates is infinite. Applying the Laplace transform gives:
(2.21) ijxx(s,x) = q(s)*ij(s,x) -e-*C(s)-'cp(x) X E ( - - , ~ O ) .
Hence,
Now, by inversion
a ac = - --f(t,[,)H(t-ao.
The formal calculus above is implicitly justified by (2.14). Rigorously (2.23) can be understood only in the distributional sense:
By (2.24) and (2.23) the solution, V , of (2.21) given by (2.22) can be refor- mulated as (c = l/a):
a - - i c p ( ~ ) ~ ( ( x - ~ ) , t ) d ~ 2e x - C I
a ax
where we have defined h by (see (2.14)) h ( x , t ) = - - - f ( t .x) , i.e. t > ax

422 G. Leugering
Even though we were able to explicitly invert the kaplace transform, 17, of u the procedure is only of formal character. However, by the same reasoning as in [S] we can show that u given by (2.25) is indeed the unique solution of (2.21) if q E C2 (R).
Remark 2. Formula (2.25) can be viewed as the d'Alembert formula for the simple linear viscoelastic liquid. 0 For convenience let us rewrite (2.25) in the following form:
1 1 ' e 2e 0
(2.26) v ( t , x ) = - c p ( x ) + - J ( q ' ( x + c l ; ) - cp ' (x -c l ; ) ) f (C , t )dC.
By standard reflection (for simplicity we take T < ul): cp (4 = vo (4 q ( x ) = - cp(-x) X E ( - c t , O )
q ( l + x ) = - c p ( l - x ) X E ( 0 , C t )
X E ( O , I )
u given by (2.26) can be evaluated as 4 4 x + c r
1 -- r . 4 (1; - x)f(C, t ) dl; 2g' x
1 = - uo (min(Z, cr + x ) ) f ( m i n ( Z - x, ct), t )
2e
+ -uo (max(O,ct))f(min(x,ct),t) 1
2e

Time Optimal Boundary Controllability of a Simple Linear Viscoelastic Liquid 423
1 - -uo (min(l, 21 - x - ct))f(max(l- x,ct), t) 2e
4 1 - -uo (max(0,ct-x)) f (max(x,ct),t)
2 e
In particular at t = al:
1 1 (2.28) u(t,x) = o(al,x) =-uo(x) --uo(l-x)
2e 2e
1 ' 2e I - x
+- u0(21-~-51h(C,al)dC
The same argument as in (2.19), (2.20) applies to (2.27) ((2.28)) even if t > al. Thus we can extend the solutions of (CP) with u = 0 to initial data uo E & (0, I). Putting things together we have:
Theorem 1. Let uo E (0, I ) , u E & (0, T), T > 0 be arbitrarily given. 7'hen there exist a unique weak solution, u, of (CP) in the sense of Lemma 1. Moreover, for t ,< al, the solution is given by
u ( ~ , x ) = (L,u)(x) + V(t,uo)
where Lr and V, are given by (2.19) and (2.27), respectively. 0
3 Controllability
Let uo E& (O,l), u E& (0, T), T Q or1 be given. Then by Theorem 1 the unique weak solution is given by

424 G. Leugering
u(t-ax) + 1 u(t-s)zf(s,x)ds + V(t.uo)(x)
V(t,oo)(x) a.e.t < a x .
a.e. t > ax ax as (3.1) u( t ,x ) =
Obviously, if we want to steer the initial state uo to rest at some time T, T has to be chosen such that T> al. In particular, for T = al, a control u connecting uo with some target uI has to satisfy:
(3.2) u(al-ax) + u(al-s)-f(s,x)ds = - V(aI,uo)(x) + ul (x) a
ax as
a1
on x E (0, I ) .
If uI E L2 (0, I) we know by Theorem 1 that the right hand side is in L2 (0, I). Defining w(t) := u(al -a( . ) ) (3.2) is equivalent to
Now, since is continuous, equation (3.3) is a Volterra integral equation of the second kind in Theorem 2. Let uo, uI EL (O,l), T = al. Then there exist a unique boundary control u E L2 (0, T) steering the trajectory 0 of(CP)from the initial state uo to
0 Remark 3. As it is obvious from (2.18) we can extend the controllability result above to larger time inverval T > al. However, we then have to dis-
0
(0, I). We thus have:
the final state u (T, x) = uI (x).
pense with the uniqueness. The theorem is still true without A2.
4 Admissible Controllability
Being provided with the controllability result of the last section it is natural to ask for controls steering the initial state uo to some final state, but with the restriction that only a small amount of boundary action is employed to the system. As was pointed out by Narukawa [3], [4] this problem, referred to as the admissible controllability problem, is strongly related to conservation or dissipation of energy. Define as in Slemrod [7]:
y( t ,s ,x ) := o(t-s,x), sE[O,cO) = 0 t <s)
the velocity history and l a , m
- J I G’(s)(y(s,x) - u(x))(y*(s,x) - u*(x))dsdx. 0 0

Time Optimal Boundary Controllability of a Simple Linear Viscoelastic Liquid 425
Denote by E the Hilbert space obtained by completion of vectors y~Cr([O,m) x (O,f))¶ u ~ C r ( O , f ) , y(0,x) = u(x). It is shown in [7] that,
provided (u , y ) is contained in the space D = ( (u , y ) E El (I G(s)y,(s,x) ds,
- - (s,x)) E H y(0,x) = u(x) x E(O,C)), we have that the trajectories of (CP)
with u ( t ) = 0 satisfy:
m
0
dY ds
I A I m
4 l m
I
= G (0) Ivo (x) l2 dx . 0
Therefore we have the energy inequality
or if we focus on the energy difference between two consequtive times T 2 To 1
1 (4.4) 7 I1 (u (n Y ( r ) ) II 'E 6 + I t (u (To), Y (To)) II : . Now, by (2.12), (2.15), (2.16) we have seen that
(4.5) L,: HE, (0, T)-+ HE, (0, I ) , t fixed.
On the other hand the states evolving freely from the initial datum uo, given by (2.27), and for the particular time t = al by (2.28), are easily seen to satisfy
(4.6) V, :HE, (0, l)-+H: (0, I ) , t fixed.
Incidently, these properties hold true on any time interval. A solution u ( t ) := L,u + V(t,uo) given by (4.9, (4.6) with data ~EH;(O,T) and u o ~ H ; ( O , I ) might be called a 'mild' solution of (CP) since it has a finite energy throughout

426 G. Leugering
its lifespan. Define a linear and bounded map, F, to transfer the initial state u0 to the control u given by Theorem 2 (u, 3 0):
F:L,(O,I)+L,(O,al), Fuo = u.
Therefore, given any L > 0 there exists a positive constant ML such that for each uo (0, I) with I( uo {I L 2 ( ~ , l ) < C. 11 uo 11 H ; ( O , I ) < L we can find a control
T
function u~&(O,al) , I lu(t)12 dt < ML such that 0
a (u as
d
u(aI-ax) + I u(al-s)--f(s,x)ds + V(al,uo) = 0.
Equivalently, given M > 0 there is a number LM such that any uo with 11 uo 4 LM can be steered to zero using a control u with 11 u II L 2 ( ~ , ~ )
< M . Evidently, if the process is dissipative, the simplest but clearly not optimal device to admissibly control a given initial configuration to rest, is to wait (a possibly long time) until the state reaches the ball determined by the admissible bound of the controls required. In order to utilize the dissipation of the energy E ( t , uo) expressed by a fairly complicated norm we need the following projection result:
Lemma 2. Define the linear map P in E as. follows:
P(u,y) = (v ,v) *
II(v,u) II E 4 KII ( U , Y ) I I E *
Then P is bounded, i.e. there is a number K 2 1 such that
Proof. Since, with (u ,y )~E , y ( 0 , x ) = u(x) and
the operator P is well defined in E. We proceed to show that P is closed. Hence, let (u“ ,y”)~E , P(u“,y”)€E con- verge to some (0, y) E E and (63 E E respectively, i.e.
i) S(I G(s)OP~(S,X) - yX(s,x))ds)’dx l o o
0 0
03 I
and

Time Optimal Boundary Controllability of a Simple Linear Viscoelastic Liquid 427
ii) i(TG(s)(u; -jjx(s,x))ds 0 0
a I
+ j l G ' ( s ) l , f ( ( ~ ~ ( ~ ) -J (s ,x ) ) -((u"(x) - i j(~)))~dxds-+O n+m. 0 0
From the second part of ii) we infer j(s,x) = 0(x), and from the first part
W I
= ,f G(s)dsJlg(x)- tjx,(2dx-*0 n + ~ . 0 0
This in turn implies the convergence of u" 3 0 in the weighted &-norm: m I
IlY I I : = SIG'(s)ISly(s,x)l2dxds 0 0
(cons tan t histories). By the second part of i), we have
(f - y) - (u" - u) = O(1)
in the & (R+, lG'(.)l, L(0,l)) sense defined above. Moreover v"+0 in this particular topology. Thus
lim (y" -y) = 0- u . n-m
From the first part of i) we infer
(7 G(s)(y"(s,x) - y(s,x))ds 0 0
Now, the operator m
1 G M.10) ds: L (R+ , IG'I, J52 (090) 0
m m
defined by J G(s)(.)(s) ds Q := 5 G(s)y(s,x) ds is certainly continuous so
that the convergence of the sequence y" - y to 17 - v in (& (R+, IG'l, (0,I)) implies
0 0
m I
G(s)ds,flfi(x) - v(x)('dx = 0 0 0
or, equivalently, fir u. Thus P(u ,y ) = (0.0) = (V,g = (ij,y3. Finally, by the 17 closed graph theorem P is bounded.

428 G. Leugering
Since, by (Al) iv) the moment condition 00
- I G’(s)s*ds < cx) 0
is automatically satisfied we can conclude by Theorem I1 of Slemrod [7] that Il(u,y)(t)IIE -+ 0 as t - - , cx ) . By Lemma 2 this implies ~ ~ u ( t ) l l H ~ ~ ~ , ~ p O , p s t+ co. Hence, given > 0 there exists a time T > al at which the “state u has reached a neighbourhood of the origin which, in turn, can be steered to rest:
Theorem 3. Let uo E HA (0, I ) , q > 0 be given. Then there exists a time T > a1 and a controI u E& (0, T ) steering the trajectories of (CP)from uo to zero such
0 Some remarks are in order:
Remark 4. i) We could have used the semigroup property o f t + ( u ( t ) , y ( t ) ) established by Slernrod [7] in order to be able to apply the results of Na- rukawa [3]. In the light of Section 2 this would have been artifical. Moreover, the applicability of those results to the particular problem of controlling the shear force, rather than the “state” (u,y), is by no means evident.
ii) Obviously, Theorem 3 can be restated for uo EHA (0,1), u EHA (0, r ) with the same conclusion.
iii) Since we do not know a particular decay rate for the damping mechanism we do not have any tool to calculate the transition time needed in the proof of Theorem 3.
that II u II LZ(0.T) < rl.
5 Time Optimal Control
The last remark gives rise to the problem of finding a suitable control, u, transferring the initial state uo to zero in the least time possible, thereby respecting the given bound (I u 11 ,< q. This problem is usually referred to as the time optimal control problem. Recall the map Lr : HA (0,T) --, HA (0,1) given by (2.19) and (2.11) (this is the more appealing representation from the actual point of view). As we have seen, Lr is bounded and can be viewed as a bounded linear map acting between HA (0, T ) and
Theorem 4. Let uo E HA (0, I ) , q > 0. The there is a minimal time T,, > 0 and a control function u,, such that the corresponding solution, u(t,x), of (CP) satisfies
(0,l).
u(T,,,x) = 0 on (0,l)
moreouer,
11 uq 11 H b ( O , T ) q *

Time Optimal Boundary Controllability of a Simple Linear Viscoelastic Liquid 429
Proof. T,, := inf{T>O, 3u : IJuJ( < q , u(T,x)rO). According to Theorem 3, the set above is not empty. Let Tk be any sequence of real numbers converging to T from above: Tk 1 T,,. Then there is a sequence
weakly convergent subsequence, which we recall u k , such that uk + u,, in HA (0, r ) and moreover,
u k E HA (0, Tk) C Ho 7 (0, r ) (trivial extension) which is bounded by q. E5tract a
L T t U k = - v(Tk,uO)=:wT,.
Now, LT,:HA(O,T) -+ Lz(O,I). Take any w€Lz(O,I):
(5.1) (w,LT,Uq) = (G, w)(uq) - (u, w)(uk)
+ ( w ~ LT, Ut) - (we LTi uk) + (WP WTt)
By weak convergence
(u, W)(U, - U k ) + o k+ 00.
Furthermore, after some calculus one verifies using (2.1 1) /
5 w (x) [(LT,, uk 0
- (LTt uk ) (x)l dx
N c(T,-s)-2J/
+ 5 [ f(Tq-s,x+2jI)w(x)dx
- 1 f(Tk-s,x+2jI)w(x)dx
- [ f(Tq-s,2jI-x)w(x)dx
j - 1 0
c ( T t -I) - 2jf
0
N
j - 1 2jl-c(T,-s)
/
- 1 f(Tk-St2jI-x)w(x)dx])ds 2J/ - c( Tt - J )
= o(Tk - Tq);
note that 11 u 11 HbjO,T) < q and that f ( . , x ) is continuous. Therefore, letting k tend to infinity in (5.1)
(5.2) (~.LT,,u,,) = (w.wT,). Since the latter equality is true for all w E L2 (0, I) we conclude
LT,u,, = WT,, = - VCT,,, 00)
and the theorem is proved. 0
430 G. Leugering
Remark 5. Whether the time optimal control, u,,, of Theorem 4 can be characterized by a (weak) bang-bang principle appears to be an open prob- lem.
References
[l] Desch, W.; Grimmer, R.C.: Initial boundary value problems for integro-differential equa-
[2] Lasiecka, I.; Triggiani, R.: A cosine operator approach to modelling &(O, T,L,(I))-bound-
[3] Narukawa, K.: Admissible null controllability and optimal time control. Hiroshima Math.
[4] Narukawa, K.: Exact and admissible controllability of viscoelastic systems with boundary
[S] Nerrain, A.; Joseph, D. D.: Linearized dynamics for step jumps of velocity and displace-
[6] Renardy, M.: Some remarks on the propagation and non-propagation of discontinuities
[7] Slemrod. M.: A hereditary partial differential equation with application in the theory of
tions. J. Int. Eq. 10 (1 -3) Suppi. (1985) 73-97
ary hyperbolic equations. J. Appl. Math. & Opt. 7 (1981) 35-93
J. 11 (1981) 533-551
controls. Preprint 1984
ment of shearing flows of a simple fluid. Rheologica Acta 21 (1982) 228-250
in lineary viscoelastic liquids. Rheologica Acta 21 (1982) 251 -254
simple fluids. Arch. Rat. Mech. Anal. 62 (1976) 303-321
Dr. G. Leugering Fachbereich Mathematik der ,Technischen Hochschule Darmstadt SchloBgartenstr. 7 D-6100 Darmstadt (Received May 16, 1986)
Note added in prooE
Meanwhile the author was able to show the corresponding results for equa- tions of second order in t , i.e. (CP) differentiated w.r.t. t , for data in & x H-' and controls in L (0, T).





























