Embed Size (px)
Citation preview

Selfish Unsplittable Flows⋆
Dimitris Fotakis1,2, Spyros Kontogiannis1,3, and Paul Spirakis1
1 Research Academic Computer Technology Institute, Riga Feraiou 61, 26221 Patras, Greece.fotakis,kontog,[email protected]
2 Dept. of Mathematical, Physical and Computational Sciences, Aristotle University ofThessaloniki, 54006 Thessaloniki, Greece.
3 Dept. of Computer Science, University of Ioannina, 45110 Ioannina, Greece.
Abstract. What is the price of anarchy when unsplittable demands are routedselfishly in general networks with load-dependent edge delays? Motivated bythis question we generalize the model of [14] to the case ofweighted congestiongames. We show that varying demands of users crucially affect the nature of thesegames, which are no longer isomorphic to exact potential games, even for verysimple instances. Indeed we construct examples where even asingle-commodity(weighted) network congestion game may have no pure Nash equilibrium.On the other hand, we study a special family of networks (which we call theℓ-layered networks) and we prove that any weighted congestion game on sucha network with resource delays equal to the congestions, possesses a pure NashEquilibrium. We also show how to construct one in pseudo-polynomial time. Fi-nally, we give a surprising answer to the question above for such games: The priceof anarchy of any weightedℓ-layered network congestion game withm edges andedge delays equal to the loads, isΘ
(
log mlog log m
)
.
1 Introduction
Consider a model where selfish users having varying demands compete for some sharedresources. The quality of service provided by a resource decreases with itscongestion,ie, the amount of demands of the users willing to be served by it. Each user may revealits actual (unique) choice (called apure strategy) among the resources available to it,or it may reveal a probability distribution for choosing oneof its candidate resources(a mixed strategy). The users determine their actual behavior based on other users’ be-havior, but they do not cooperate. We are interested in situations where the users havereached some kind of equilibrium. The most popular notion ofequilibrium in nonco-operative game theory is theNash equilibrium: a “stable point” among the users, fromwhich no user is willing to deviate unilaterally. In [14] thenotion of thecoordinationratio or price of anarchywas introduced, as a means for measuring the performancedegradation due to lack of users’ coordination when sharingcommon goods.
A realistic scenario for the above model is when unsplittable demands are routedselfishly in general networks with load-dependent edge delays. When the underlying
⋆ This work was partially supported by the EU within the Futureand Emerging TechnologiesProgramme under contract IST-2001-33135 (CRESCCO) and within the 6th Framework Pro-gramme under contract 001907 (DELIS).

network consists of two nodes and parallel links between them, there has been an ex-tensive study on the existence and computability of equilibria, as well as on the priceof anarchy. Motivated by the work of [14], we generalize their concept to theweightedcongestion gamesin a non-trivial way. When users have identical demands, such a gameis indeed isomorphic to anexact potential game([19]) and thus always possesses a pureNash equilibrium, ie, an equilibrium where each user adoptsa pure strategy. We showthat varying demands of users crucially affect the nature ofthese games, which areno longer isomorphic to exact potential games. Indeed we construct examples whereeven a single-commodity (weighted) network congestion game may have no pure Nashequilibrium at all.
On the other hand, we explore weighted congestion games on a special family ofnetworks, theℓ-layered networks. We prove the existence of pure Nash equilibria forsuch games. We also propose a pseudo-polynomial time algorithm for constructing one.Finally, we study the price of anarchy for these networks andwe come to a rathersurprising conclusion: Within constant factors, the worstcase instance (wrt the price ofanarchy) among weightedℓ-layered network congestion games withm edges and edgedelays equal to the loads, is the parallel links game introduced in [14].
1.1 The Model
Consider having a set of resourcesE in a system. For eache ∈ E, letde(·) be the delayper user that requests its service, as a function of the totalusage of this resource by allthe users. Each such function is considered to be non-decreasing in the total usage ofthe corresponding resource. Each resource may be represented by a pair of points: anentry point to the resource and an exit point from it. So, we represent each resource byan arc from its entry point to its exit point and we associate with this arc the cost (eg,the delay as a function of the load of this resource) that eachuser has to pay if she isserved by this resource. The entry/exit points of the resources need not be unique; theymay coincide in order to express the possibility of offeringjoint service to users, thatconsists of a sequence of resources. We denote byV the set of all entry/exit points ofthe resources in the system. Any nonempty collection of resources corresponding to adirected path inG ≡ (V, E) comprises anactionin the system.
Let N ≡ [n] be a set of users, each willing to adopt some action in the system.∀i ∈ N , let wi denote useri’s demand(eg, the flow rate from a source node to adestination node), whileΠi ⊆ 2E \ ∅ is the collection of actions, any of which wouldsatisfy useri (eg, alternative routes from a source to a destination node,if G representsa communication network). The collectionΠi is called theaction setof useri and eachof its elements contains at least one resource. Any tuple ∈ Π ≡ ×n
i=1Πi is apurestrategies profile, or aconfigurationof the users. Any real vectorp = (p1, p2, . . . , pn)s.t. ∀i ∈ [n], pi : Πi → [0, 1] is a probability distribution over the set of allowableactions for useri, is called amixed strategies profilefor then users.
A congestion model typically deals with users of identical demands, and thus, re-source delay functions depend on thenumberof users adopting each action ([21, 19,7]). In this work we consider the more general case, where aweighted congestionmodelis the tuple((wi)i∈N , (Πi)i∈N , (de)e∈E). That is, we allow the users to have

different demands for service from the whole system, and thus affect the resource de-lay functions in a different way, depending on their own weights. Theweighted con-gestion gameassociated with this model, is the game in strategic form with the setof usersN and user demands(wi)i∈N , the action sets(Πi)i∈N and cost functions(λi
i)i∈N,i∈Πi
defined as follows: For any configuration ∈ Π and∀e ∈ E, letΛe() = i ∈ N : e ∈ i be the set of users exploiting resourcee according to. Thecostλi() of useri for adopting strategy i ∈ Πi in a given configurationis λi() = λi
() =∑
e∈ide(θe()) where,∀e ∈ E, θe() ≡ ∑
i∈Λe() wi
is the load on resourcee wrt the configuration . On the other hand, for a mixedstrategies profilep, the expected cost of useri for adopting strategy i ∈ Πi isλi
i(p) =
∑
−i∈Π−i P (p−i, −i) · ∑
e∈ide
(
θe(−i ⊕ i)
)
where,−i is aconfiguration of all the users except fori, p−i is the mixed strategies profile of allusers except fori, −i ⊕ i is the new configuration withi choosing strategy i, andP (p−i, −i) ≡ ∏
j∈N\i pj(j) is the occurrence probability of −i.A congestion game in which all users are indistinguishable (ie, they have the same
user cost functions) and have the same action set, is calledsymmetric. When each user’saction setΠi consists of sets of resources that comprise (simple) paths between a uniqueorigin-destination pair of nodes(si, ti) in (V, E), we refer to anetwork congestiongame. If additionally all origin-destination pairs of the userscoincide with a uniquepair (s, t) we have asingle commodity network congestion gameand then all usersshare exactly the same action set. Observe that a single-commodity network congestiongame is not necessarily symmetric because the users may havedifferent demands andthus their cost functions will also differ.Selfish Behavior. Fix an arbitrary (mixed in general) strategies profilep for a con-gestion game((wi)i∈N , (Πi)i∈N , (de)e∈E). We say thatp is aNash Equilibrium (NE)if and only if ∀i ∈ N, ∀i, πi ∈ Πi, pi(i) > 0 ⇒ λi
i(p) ≤ λi
πi(p). A con-
figuration ∈ Π is a Pure Nash Equilibrium (PNE)if and only if ∀i ∈ N, ∀πi ∈Πi, λi
() ≤ λπi(−i⊕πi) where, −i⊕πi is the same configuration with except
for user i that now chooses actionπi. Thesocial costSC(p) in this congestion gameis SC(p) =
∑
∈Π P (p, ) · maxi∈Nλi() , whereP (p, ) ≡ ∏n
i=1 pi(i)is the probability of configuration occurring, wrt the mixed strategies profilep. Thesocial optimumof this game is defined asOPT = min∈Π maxi∈N [λi
()] . The
price of anarchyfor this game is then defined asR = maxp is a NE
SC(p)OPT
.
Configuration Paths and Dynamics Graph. For a congestion gameΓ =((wi)i∈N , (Πi)i∈N , (de)e∈E), a path in Π = ×i∈NΠi is a sequence of configura-tions γ = ((0), (1), . . . , (k)) s.t. ∀j ∈ [k], (j) = ((j − 1))−i ⊕ πi, forsomei ∈ N andπi ∈ Πi. γ is a closed pathif (0) = (k). It is a simple pathifno configuration is contained in it more than once.γ is animprovement pathwrt Γ , if∀j ∈ [k], λij ((j)) < λij ((j − 1)) whereij is the unique user differing in its strat-egy between (j) and(j − 1). TheDynamics Graphof Γ is a directed graph whosevertices are configurations and there is an arc from a configuration to a configuration−i ⊕ πi for someπi ∈ Πi if and only if λi() > λi(−i ⊕ πi).Layered Networks. We now define a special family of networks whose behavior wrtthe price of anarchy (we shall prove that) is asymptoticallyequivalent to that of theparallel links model of [14], which is actually a1-layered network: Letℓ ≥ 1 be an

integer. A directed networkG = (V, E) with a distinguished source - destination pair(s, t), s, t ∈ V , is ℓ-layeredif every directeds − t path has length exactlyℓ and eachnode lies on a directeds− t path. In a layered network there are no directed cycles andall directed paths are simple. In the following, we always use m to denote the number|E| of edges in anℓ-layered networkG = (V, E).Atomic Assignments. We consideratomicassignments of users to actions, ie, eachuseri ∈ N requires all its demandwi from exactly one allowable action i ∈ Πi.Nevertheless, we allow users to adopt mixed strategies. Ourfocus in this paper is two-fold: We are interested in families of resource delay functions for which the weightedsingle-commodity network congestion game has a PNE, and we are also interested inthe price of anarchy for a special case of this problem whereG has the form of anℓ-layered network (to be defined later) and the delay functionsare identical to the loadsof the resources.
1.2 Related Work
Existence and Tractability of PNE. It is already known that the class of unweighted(atomic) congestion games (ie, users have the same demands and thus, the same affec-tion on the resource delay functions) is guaranteed to have at least one PNE: actually,Rosenthal ([21]) proved that any potential game has at leastone PNE and it is easy towrite any unweighted congestion game as an exact potential game using Rosenthal’spotential function1 (eg, [7, Thm1]). In [7] it is proved that a PNE for any unweightedsingle-commodity network congestion game2 (no matter what resource delay functionsare considered, so long as they are non-decreasing with loads) can be constructed inpolynomial time, by computing the optimum of Rosenthal’s potential function, througha nice reduction to min-cost flow. On the other hand, it is shown that even for a sym-metric congestion game or an unweighted multicommodity network congestion game,it is PLS-complete to find a PNE (though it certainly exists).
The special case of single-commodity, parallel-edges network congestion gamewhere the resources are considered to behave as parallel machines, has been exten-sively studied in recent literature. In [9] it was shown thatfor the case of users withvarying demands and uniformly related parallel machines, there is always a PNE whichcan be constructed in polynomial time. It was also shown thatit is NP-hard to constructthe best or the worst PNE. In [10] it was proved that the fully mixed NE (FMNE), in-troduced and thoroughly studied in [17], is worse than any PNE, and any NE is at most(6 + ǫ) times worse than the FMNE, for varying users and identical parallel machines.In [16] it was shown that the FMNE is the worst possible for thecase of two relatedmachines and tasks of the same size. In [15] it was proved thatthe FMNE is the worstpossible when the global objective is the sum of squares of loads.
[8] studies the problem of constructing a PNE from any initial configuration, ofsocial cost at most equal to that of the initial configuration. This immediately impliesthe existence of a PTAS for computing a PNE of minimum social cost: first computea configuration of social cost at most(1 + ǫ) times the social optimum ([11]), and
1 For more details on Potential Games, see [19].2 Since [7] only considers unit-demand users, this is also a symmetric network congestion game.

consequently transform it into a PNE of at most the same social cost. In [6] it is alsoshown that even for the unrelated parallel machines case a PNE always exists, and apotential-based argument proves a convergence time (in case of integer demands) fromarbitrary initial configuration to a PNE in timeO
(
mWtot + 4Wtot/m+wmax
)
whereWtot =
∑
i∈N wi andwmax = maxi∈Nwi.[18] studies the problem of weighted parallel-edges network congestion games with
user-specific costs: each allowable action of a user consists of a single resource and eachuser has its own private cost function for each resource. It is shown that: (1) weighted(parallel-edges network) congestion games involving onlytwo users, or only two possi-ble actions for all the users, or equal delay functions (and thus, equal weights), alwayspossess a PNE; (2) even a single-commodity, 3-user, 3-actions, weighted (parallel-edgesnetwork) congestion game may not possess a PNE (using 3-wiselinear delay functions).Price of Anarchy in Congestion Games.In the seminal paper [14] the notion of coor-dination ratio, or price of anarchy, was introduced as a means for measuring the perfor-mance degradation due to lack of users’ coordination when sharing common resources.In this work it was proved that the price of anarchy is3/2 for two related parallel ma-chines, while form machines and users of varying demands,R = Ω (log m/ log log m)andR = O
(√m logm
)
. For m identical parallel machines, [17] proved thatR =Θ (log m/ log log m) for the FMNE, while for the case ofm identical parallel machinesand users of varying demands it was shown in [13] thatR = Θ (log m/ log log m). In[4] it was finally shown thatR = Θ (log m/ log log log m) for the general case ofrelated machines and users of varying demands. [3] presentsa thorough study of thecase of general, monotone delay functions on parallel machines, with emphasis on de-lay functions from queuing theory. Unlike the case of lineardelays, they show that theprice of anarchy for non-linear delays is in general far worse and often even unbounded.
In [22] the price of anarchy in a multicommodity network congestion game amonginfinitely many users, each of negligible demand, is studied. The social cost in this caseis expressed by the total delay paid by the whole flow in the system. For linear resourcedelays, the price of anarchy is at most4/3. For general, continuous, non-decreasingresource delay functions, the total delay of any Nash flow is at most equal to the totaldelay of an optimal flow for double flow demands. [23] proves that for this setting, itis actually the class of allowable latency functions and notthe specific topology of anetwork that determines the price of anarchy.
1.3 Our Contribution.
In this paper, we generalize the model of [14] (KP-model) to the weighted conges-tion games. We also define a special class of networks, theℓ-layered networks, whichdemonstrate a rather surprising behavior: their worst instance wrt the price of anar-chy is (within constant factors) the parallel links networkintroduced in [14]. Morespecifically, we prove that: (I) Weighted congestion games are not isomorphic to po-tential games. We show the existence of weighted single-commodity network conges-tion games with resource delays being either linear or 2-wise linear functions of theloads, for which there PNE cannot exist (lemma 1). (II) Thereexist weighted single-commodity network congestion games which admit no exact potential function, evenwhen the resource delays are identical to their loads (lemma2). (III) For a weightedℓ-layered network congestion game with resource delays equalto their loads, at least one
PNE exists and can be constructed in pseudo-polynomial time(theorem 1). (IV) Theprice of anarchy of any weightedℓ-layered network congestion game withm resources(edges) and resource delays equal to their loads, is at most8 e ( log m
log log m + 1), whereeis the basis of the natural logarithm (theorem 2). To our knowledge this is the first timethat the KP-model is studied in non-trivial networks (otherthan the parallel links).
2 Pure Nash Equilibria
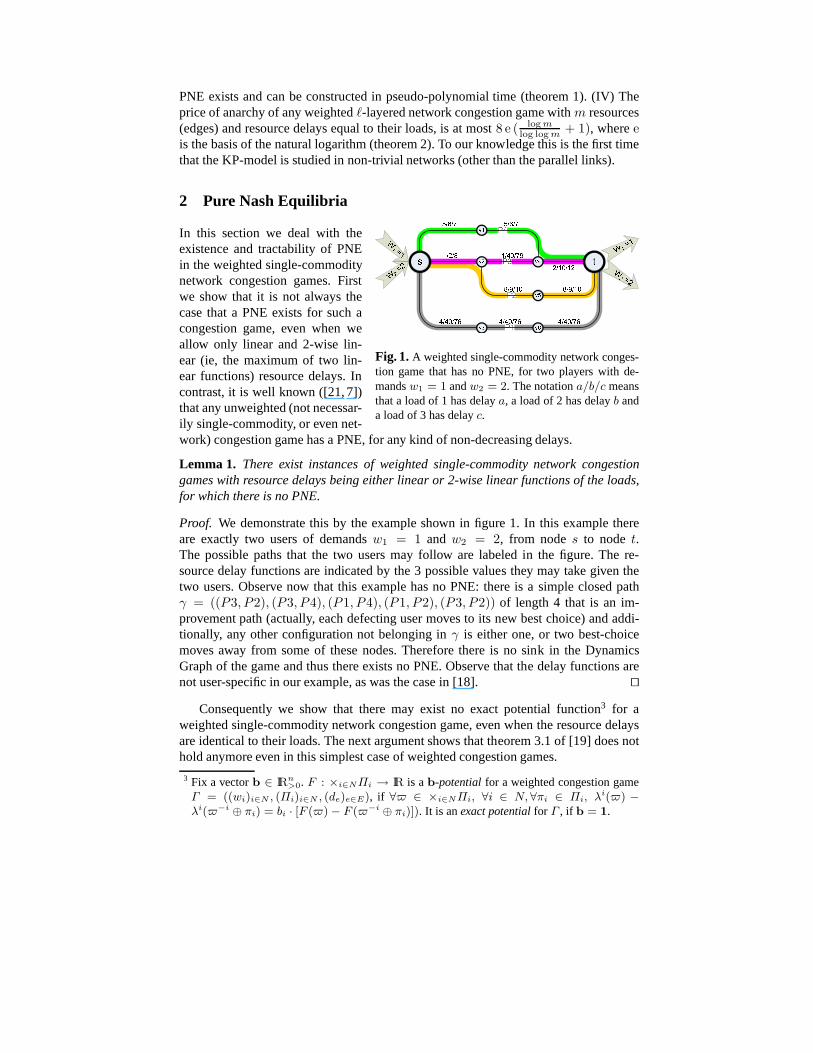
Fig. 1.A weighted single-commodity network conges-tion game that has no PNE, for two players with de-mandsw1 = 1 andw2 = 2. The notationa/b/c meansthat a load of 1 has delaya, a load of 2 has delayb anda load of 3 has delayc.
In this section we deal with theexistence and tractability of PNEin the weighted single-commoditynetwork congestion games. Firstwe show that it is not always thecase that a PNE exists for such acongestion game, even when weallow only linear and 2-wise lin-ear (ie, the maximum of two lin-ear functions) resource delays. Incontrast, it is well known ([21, 7])that any unweighted (not necessar-ily single-commodity, or even net-work) congestion game has a PNE, for any kind of non-decreasing delays.
Lemma 1. There exist instances of weighted single-commodity network congestiongames with resource delays being either linear or 2-wise linear functions of the loads,for which there is no PNE.
Proof. We demonstrate this by the example shown in figure 1. In this example thereare exactly two users of demandsw1 = 1 and w2 = 2, from nodes to nodet.The possible paths that the two users may follow are labeled in the figure. The re-source delay functions are indicated by the 3 possible values they may take given thetwo users. Observe now that this example has no PNE: there is asimple closed pathγ = ((P3, P2), (P3, P4), (P1, P4), (P1, P2), (P3, P2)) of length 4 that is an im-provement path (actually, each defecting user moves to its new best choice) and addi-tionally, any other configuration not belonging inγ is either one, or two best-choicemoves away from some of these nodes. Therefore there is no sink in the DynamicsGraph of the game and thus there exists no PNE. Observe that the delay functions arenot user-specific in our example, as was the case in [18]. ⊓⊔
Consequently we show that there may exist no exact potentialfunction3 for aweighted single-commodity network congestion game, even when the resource delaysare identical to their loads. The next argument shows that theorem 3.1 of [19] does nothold anymore even in this simplest case of weighted congestion games.
3 Fix a vectorb ∈ IRn>0. F : ×i∈NΠi → IR is ab-potential for a weighted congestion game
Γ = ((wi)i∈N , (Πi)i∈N , (de)e∈E), if ∀ ∈ ×i∈NΠi, ∀i ∈ N,∀πi ∈ Πi, λi() −
λi(−i ⊕ πi) = bi · [F () − F (−i ⊕ πi)]). It is anexact potentialfor Γ , if b = 1.

Lemma 2. There exist weighted single-commodity network congestiongames whichare not exact potential games, even for resource delays identical to their loads.
Proof. Let Γ = ((wi)i∈N , (Πi)i∈N , (de)e∈E) denote a weighted single commoditynetwork congestion game withde(x) = x, ∀e ∈ E. Let’s define the quantityI(γ, λ) =∑r
k=1
[
λik((k)) − λik((k − 1))]
, whereik is the unique user in which the config-urations(k) and(k − 1) differ. Our proof is based on the fact thatΓ is an (exact)potential game if and only if every simple closed pathγ of length 4 hasI(γ, λ) = 0([19, Thm2.8]). Indeed, for an arbitrary initial configuration and anyπ1 ∈ Π1 \1, π2 ∈ Π2 \ 2, we consider the closed, simple 4-pathγ = (, −1 ⊕π1, −(1,2) ⊕ (π1, π2), −2 ⊕ π2), . We then prove (see full paper) thatI = (w1 −w2)·[|(π1 \ 1) ∩ (π2 \ 2)| + |(1 \ π1) ∩ (2 \ π2)| − |(1 \ π1) ∩ (π2 \ 2)|−− |(π1 \ 1) ∩ (2 \ π2)|] , which is typically not equal to zero for a single-commodity network. It should be noted that the second parameter, which is networkdependent, can be non-zero even for some cycle of a very simple network. For ex-ample, in the network of figure 1 (which is a simple 2-layered network) the simpleclosed pathγ = ((0) = (P1, P3), (1) = (P2, P3), (2) = (P2, P1), (3) =(P1, P1), (4) = (P1, P3)) has this quantity equal to−4 and thus no weighted singlecommodity network congestion game on this network can admitan exact potential. ⊓⊔
Our next step is to focus our interest on theℓ-layered networks with resource delaysidentical to their loads. We shall prove that any weightedℓ-layered network congestiongame with these delays admits at least one PNE, which can be computed in pseudo-polynomial time. Although we already know that even the caseof weightedℓ-layerednetwork congestion games with delays equal to the loads cannot have any exact poten-tial4, we will next show thatΦ() ≡ ∑
e∈E [θe()]2 is ab-potential for such a gameand some positiven-vectorb, assuring the existence of a PNE.
Theorem 1. For any weightedℓ-layered network congestion game with resource delaysequal to their loads, at least one PNE exists and can be computed in pseudo-polynomialtime.
Proof. Fix an arbitraryℓ-layered network(V, E) and denote byP all thes − t pathsin it from the unique sources to the unique destinationt. Let ∈ Pn be an arbitraryconfiguration of the users for the corresponding congestiongame on(V, E). Also, letibe a user of demandwi and fix some pathπi ∈ P . Denote ′ ≡ −i ⊕ πi. ObservethatΦ()−Φ(′) =
∑
e∈i\πi
(
θ2e() − θ2
e(′)
)
+∑
e∈πi\i
(
θ2e() − θ2
e(′)
)
=∑
e∈i\πi
(
[θe(−i) + wi]
2 − θ2e(
−i))
+∑
e∈πi\i
(
θ2e(−i) − [θe(
−i) + wi]2)
= 2wi ·(
∑
e∈i\πiθe(
−i) − ∑
e∈πi\iθe(
−i))
= 2wi ·[
λi() − λi(′)]
,
since,∀e ∈ i ∩ πi θe() = θe(′), in ℓ-layered networks|i \ πi| = |πi \ i|,
λi() =∑
e∈iθe() =
∑
e∈i\πiθe(
−i) + wi|i \ πi| +∑
e∈i∩πiθe() and
λi(′) =∑
e∈πiθe(
′) =∑
e∈πi\iθe(
−i) + wi|πi \ i| +∑
e∈i∩πiθe().
Thus,Φ is a b-potential for our game, wherep = (1/(2wi))i∈N > 0, assuring theexistence of at least one PNE.
4 The example at the end of the proof of lemma 2 involves the2-layered network of figure 1.

Wlog assume that the users have integer weights. Then each user performing anyimproving defection, must reduce its cost by at least 1 and thus the potential functiondecreases by at least2wmin ≥ 2 along each arc of the Dynamics Graph of the game.Consequently, the naıve algorithm that, starting from an arbitrary initial configuration ∈ P , follows any improvement path that leads to a sink (ie, a PNE)of the DynamicsGraph, cannot move more than12 |E|W 2
tot times, since∀ ∈ P , Φ() ≤ |E|W 2tot. ⊓⊔
3 The price of anarchy inℓ-layered networks
Fig. 2. Example of anℓ-layered network with linear re-source delays and unbounded anarchy.
In this section we focus ourinterest on weightedℓ-layerednetwork congestion gameswhere the resource delays areidentical to their loads. Themain reason why we focuson this specific category ofresource delays is that selfish unsplittable flows have usually unbounded price ofanarchy. In [22, p. 256] an example is given where the price ofanarchy is unbounded.This example is easily converted in anℓ-layered network. The resource delay functionsused are either constant or M/M/1-like delay functions. Butwe can be equally badeven with linear resource delay functions: Observe the following example of figure 2.Two users, each of unit demand, want to move selfishly froms to t. The edge delaysare shown above them. We assume thata ≫ b ≫ 1 ≥ c). It is easy to see thatthe configuration (sCBt,sADt) is a PNE of social cost2 + b while the optimumconfiguration is (sABt,sCDt) whose social optimum is2 + c. Thus,R = b+2
c+2 .So in this section we study weightedℓ-layered networks whose resource delays
equal their loads. Our main tool is to interpret mixed (in general) strategies profiles intosome sort of (splittable) flows in this network.Flows and Mixed Strategies Profiles.Fix an arbitraryℓ-layered networkG = (V, E)andn distinct users willing to satisfy their own traffic demands from the unique sources ∈ V to the unique destinationt ∈ V . Again, w = (wi)i∈[n] denotes the varyingdemands of the users. Fix an arbitrary mixed strategies profile p = (p1, p2, . . . , pn). Afeasible flowfor the n users is a functionρ : P 7→ IR≥0, s.t.
∑
π∈P ρ(π) = Wtot ≡∑
i∈[n] wi, ie, all users’ demands are actually met. We distinguish betweenunsplittableandsplittable (feasible) flows. A flow is unsplittable if each user’s trafficdemand issatisfied by a unique path ofP . A flow is splittable if the traffic demand of each user isdivided into infinitesimally small parts which are then routed over several paths ofP .
We map any profilep to a flowρp as follows:∀π ∈ P , ρp(π) ≡ ∑
i∈[n] wi · pi(π).That is, we handle theexpected load traveling alongπ according top as a splittableflow created by all the users, where∀i ∈ [n], i routes a fractionpi(π) of its totaldemandwi alongπ. Observe that for the special case wherep is a pure strategies pro-file, the corresponding flow is then unsplittable. Recall nowthat ∀e ∈ E, θe(p) ≡∑n
i=1 wi
∑
π∋e pi(π) =∑
π∋e ρp(π) ≡ θe(ρp) is the expected load (and in ourcase, also the expected delay) ofe wrt p. As for the expected delay along a pathπ ∈ P according top, this is θπ(p) ≡ ∑
e∈π θe(p) =∑
e∈π
∑
π′∋e ρp(π′) =

∑
π′∈P |π ∩ π′|ρp(π′) ≡ θπ(ρp). Let θmin(ρ) = minπ∈Pθπ(ρ) be the minimumexpected delay among alls − t paths. From now on for simplicity we drop the sub-script of p from its corresponding flowρp, when this is clear by the context. Weevaluate flowρ using the objective ofmaximum latency among used paths: L(ρ) ≡maxπ:ρ(π)>0θπ(ρ) = maxπ:∃i, pi(π)>0θπ(p) ≡ L(p). This is nothing more thanthemaximum expected delay paid by the users, wrt p. Sometimes we also evaluate flowρ using the objective oftotal latency: C(ρ) ≡ ∑
π∈P ρ(π)θπ(ρ) =∑
e∈E θ2e(ρ) =
∑
e∈E θ2e(p) ≡ C(p) . We get the second equality by summing over the edges ofπ and
reversing the order of the summation. From now on we denote byρ∗ andρ∗f the optimalunsplittable and splittable flows respectively.Flows at Nash Equilibrium. Let p be a mixed strategies profile and letρ be the cor-responding flow. The cost of useri on pathπ is λi
π(p) = ℓwi + θ−iπ (p) (G is an
ℓ-layered network with resource delays equal to the loads), whereθ−iπ (p) is the ex-
pected delay along pathπ if the demand of useri was removed from the system:θ−i
π (p) =∑
π′∈P |π ∩ π′|∑j 6=i wjpj(π′) = θπ(p) − wi
∑
π′∈P |π ∩ π′|pi(π′) and
thus,λiπ(p) = θπ(p)+
[
ℓ − ∑
π′∈P |π ∩ π′|pi(π′)
]
wi. Observe now that, ifp is a NE,thenL(p) = L(ρ) ≤ θmin(ρ) + ℓ wmax. Otherwise, the users routing their traffic on apath of expected latency greater thanθmin(ρ) + ℓ wmax could improve their latency bydefecting to a path of expected latencyθmin(ρ). When we say that a flowρ correspond-ing to a mixed strategies profilep is a NE, we imply that it is actuallyp which is a NE.Maximum Latency versus Total Latency. We show that a splittable flow is optimalwrt the objective of maximum latency if and only if it is optimal wrt the objective oftotal latency. As a corollary, we obtain that the optimal splittable flow defines a NEwhere all users adopt the same mixed strategy for their demands. Consider thes − tflow polytope (FP):
∑
π∈P ρ(π) = Wtot; ρ(π) ≥ 0, ∀π ∈ P
. One can ask for theflow that minimizes eitherL(ρ) = maxπ:ρ(π)>0θπ(ρ), or C(ρ) =
∑
e∈E θ2e(ρ).
For general resource delay functions the two objectives aredifferent. However, in thespecial case that the delay of an edge is equal to the load routed through it, we provethat the two objectives are equivalent.
Lemma 3. There is a unique splittable flowρ which minimizes bothL(ρ) andC(ρ).
Proof. For every flowρ, the average latency ofρ cannot exceed the maximum latencyinduced byρ: C(ρ) =
∑
π∈P ρ(π)θπ(ρ) =∑
π:ρ(π)>0 ρ(π)θπ(ρ) ≤ L(ρ)Wtot. A(splittable) flowρ minimizesC(ρ) =
∑
e∈E θ2e(ρ) if and only if for everyπ1, π2 ∈ P :
ρ(π1) > 0, θπ1(ρ) ≤ θπ2
(ρ) (eg, [2], [20, Section 7.2], [22, Corollary 4.2]). Hence, ifρ is optimal wrt the total latency, then∀ π1, π2 ∈ P : ρ(π1) · ρ(π2) > 0, θπ1
(ρ) =θπ2
(ρ) = L(ρ), implying thatC(ρ) =∑
π∈P:ρ(π)>0 ρ(π)θπ(ρ) = L(ρ)Wtot.Let ρ be the flow that minimizes the total latency and letρ′ be the flow that min-
imizes the maximum latency. We prove the lemma by establishing that the two flowsare identical. Observe thatL(ρ′) ≥ C(ρ′)
Wtot
≥ C(ρ)Wtot
= L(ρ) . The first inequality followsfrom the general bound onC(ρ′), while the rest comes from the assumption thatρ min-imizes the total latency. On the other hand,L(ρ′) ≤ L(ρ) due to the assumption thatthe flowρ′ minimizes the maximum latency. Hence,L(ρ′) = L(ρ) andC(ρ′) = C(ρ).Since the functionC(ρ) is strictly convex and thes − t flow polytope (FP) is also con-vex, there is a unique flow which minimizes the total latency. ⊓⊔

Lemma 3 implies that the optimal splittable flow can be computed in polynomialtime, since it is the solution of a convex program. The following corollary states thatthe optimal splittable flow defines a NE where all users followexactly the same strategy.
Corollary 1. Let ρ∗f be the optimal splittable flow andp the mixed strategies profilewhere∀i ∈ N and∀π ∈ P , pi(π) = ρ∗f (π)/Wtot. Then,p is a NE.
Proof. See full paper. ⊓⊔An Upper Bound on the Social Cost. We derive an upper bound on the social costof any strategy profile whose maximum expected delay (ie, themaximum latency of itsflow) is within a constant factor from the maximum latency of an optimal flow.
Lemma 4. Let ρ∗ be the optimal unsplittable flow, and letp be a mixed strategiesprofile andρ its corresponding flow. IfL(p) = L(ρ) ≤ α L(ρ∗), for someα ≥ 1, then,if m = |E| is the number of edges in the network,SC(p) ≤ (α+1)O( log m
log log m )L(ρ∗) .
Proof. ∀e ∈ E and∀i ∈ [n], let the r.v. describing the actual load routed throughe by i be Xe,i = wi · II[i’s demand is routed through a pathπ ∋ e]. Then,IE[Xe,i] =∑
π∋e wipi(π). Since each user selects its path independently, for each fixed edgee,the r.v.s ofXe,ii∈[n] are independent of each other.∀e ∈ E, let Xe =
∑ni=1 Xe,i
describe the actual load routed throughe, and thus, the actual delay paid by any usertraversinge. By linearity of expectation,IE[Xe] = θe(ρ). By applying the Hoeffdingbound5 with w = wmax and t = e κ maxθe(ρ), wmax, we obtain that∀κ ≥ 1,IP[Xe ≥ e κ maxθe(ρ), wmax] ≤ κ−e κ. By the union bound we conclude thatIP[∃e ∈ E : Xe ≥ e κ maxθe(ρ), wmax] ≤ mκ−e κ. Now, ∀π ∈ P : ρ(π) > 0,we define the r.v.Xπ =
∑
e∈π Xe describing the actual delay alongπ. The socialcost ofp, which is equal to the expected maximum delay experienced bysome user,cannot exceed the expected maximum delay among pathsπ with ρ(π) > 0. Formally,SC(p) ≤ IE[maxπ:ρ(π)>0Xπ] . If ∀e ∈ E, Xe ≤ e κ maxθe(ρ), wmax, then∀π ∈P : ρ(π) > 0, Xπ ≤ e κ
∑
e∈π maxθe(ρ), wmax ≤ e κ∑
e∈π(θe(ρ) + wmax) =e κ (θπ(ρ) + ℓwmax) ≤ e κ (L(ρ) + ℓwmax) ≤ e (α + 1)κ L(ρ∗) . The third equal-ity follows from θπ(ρ) =
∑
e∈π θe(ρ), the fourth inequality fromθπ(ρ) ≤ L(ρ)sinceρ(π) > 0, and the last inequality from the hypothesis thatL(ρ) ≤ α L(ρ∗)and the fact thatℓwmax ≤ L(ρ∗) becauseρ∗ is an unsplittable flow. Therefore,we conclude thatIP[maxπ:ρ(π)>0Xπ ≥ e (α + 1)κ L(ρ∗)] ≤ mκ−e κ . In otherwords, the probability that the actual maximum delay causedby p exceeds the opti-mal maximum delay by a factor greater than2e (α + 1)κ is at mostmκ−e κ. There-fore, for everyκ0 ≥ 2, SC(p) ≤ e (α + 1)L(ρ∗)
(
κ0 +∑∞
k=κ0kmk−e k
)
≤ e (α +
1)L(ρ∗)(
κ0 + 2mκ−e κ0+10
)
. If κ0 = 2 log mlog log m , thenκ−e κ0+1
0 ≤ m−1, ∀m ≥ 4. Thus,
SC(p) ≤ 2e (α + 1)( log mlog log m + 1)L(ρ∗) . ⊓⊔
Bounding the Coordination Ratio. We finally show that the maximum expected delayof every NE is a good approximation of the optimal maximum latency. Then, we canapply Lemma 4 to bound the price of anarchy for our selfish routing game.
5 We use the following version of the Hoeffding bound ([12]): LetX1, X2, . . . , Xn be indepen-
dent r.v.s with values in[0, w]. Let X =∑n
i=1Xi. Then,∀t > 0, IP[X ≥ t] ≤
(
e IE[X]t
)t/w.

Lemma 5. For any flowρ corresponding to a NEp, L(ρ) ≤ 3L(ρ∗).
Proof. We actually show thatL(ρ) ≤ L(ρ∗f ) + 2 ℓ wmax, whereρ∗f is the optimal split-table flow. This implies the lemma becauseL(ρ∗) ≥ maxL(ρ∗f), ℓ wmax. The proofis based on Dorn’s Theorem [5] establishing strong duality in quadratic programming.
Let Q be the square matrix describing the number of edges shared bypairs of paths.Ie, ∀π, π′ ∈ P , Q[π, π′] = |π ∩ π′|. ClearlyQ is symmetric. We prove that it is also
positive semi-definite (see full paper).∀ρ ∈ IR|P|≥0 , the total latency of flowρ is C(ρ) =
ρT Qρ. In addition,(Qρ)π = θπ(ρ). Thus, the problem of computing a flow of valueWtot and minimum total latency is equivalent to computing the optimal solution of thefollowing quadratic program (CP): minρT Qρ : 1T ρ ≥ Wtot, ρ ≥ 0. Notice thatno flow of value greater thanWtot can be optimal forCP. The Dorn’s dual of (CP) is(DP): maxzWtot − ρT Qρ : 2Qρ ≥ 1z, z ≥ 0 (see, [5], [1, Chapter 6]). We observethat any flowρ which is feasible for (CP) can be regarded as a feasible solution for(DP) if we setz = 2 θmin(ρ). The objective value of the solution(ρ, 2θmin(ρ)) in (DP)is 2 θmin(ρ)Wtot − C(ρ). Hence, an intuitive way of thinking about the dual programis that it asks for the flowρ that maximizes the difference2 θmin(ρ)Wtot − C(ρ).
By Dorn’s Theorem [5], sinceQ is symmetric and positive semi-definite and both(CP) and (DP) are feasible, they both have optimal solutions of the same objectivevalue. In our case, the optimal splittable flowρ∗f , which is the optimal solution for (CP),corresponds to the solution(ρ∗f , 2 θmin(ρ∗f )), which is feasible for (DP). Moreover, forρ∗f , L(ρ∗f) = θmin(ρ∗f ) andC(ρ∗f ) = WtotL(ρ∗f) = Wtotθ
min(ρ∗f ) (see also the proofof Lemma 3). Thus, the objective value of the solution(ρ∗f , 2 θmin(ρ∗f )) in (DP) is ex-actlyC(ρ∗f ), and thus by Dorn’s Theorem [5],(ρ∗f , 2 θmin(ρ∗f )) is optimal for (DP). Forevery feasible flowρ for (CP), (ρ, 2 θmin(ρ)) is feasible for (DP). Since the optimal so-lution for (DP) has objective valueC(ρ∗f ), it must be2 θmin(ρ)Wtot−C(ρ) ≤ C(ρ∗f ) .
If the flow ρ is a NE, thenL(ρ) ≤ θmin(ρ) + ℓ wmax. Hence, it suffices to prove thatθmin(ρ) ≤ L(ρ∗f) + ℓ wmax. Since the average latency ofρ cannot exceed its maxi-mum latency (see also the proof of Lemma 3), it is the case thatC(ρ) ≤ L(ρ)Wtot ≤θmin(ρ)Wtot + ℓ wmax Wtot. Combining this with the last inequality, we obtain thatθmin(ρ)Wtot ≤ C(ρ∗f ) + ℓ wmax Wtot. UsingC(ρ∗f ) = L(ρ∗f )Wtot, we conclude thatθmin(ρ) ≤ L(ρ∗f) + ℓ wmax. ⊓⊔
The following theorem is an immediate consequence of Lemma 5and Lemma 4.
Theorem 2. The price of anarchy of anyℓ-layered network congestion game with re-source delays equal to their loads, is at most8 e ( log m
log log m + 1).
References
1. Bazaraa M.S. and Sherali H.D. and Shetty C.M.Nonlinear Programming: Theory and Algo-rithms (2nd edition). John Wiley and Sons, Inc., 1993.
2. Beckmann M. and McGuire C.B. and Winsten C.B.Studies in the Economics of Transporta-tion. Yale University Press, 1956.
3. Czumaj A. and Krysta P. and Vocking B. Selfish traffic allocation for server farms. InProc.of the 34th ACM Symp. on Theory of Computing (STOC ’02), pages 287–296, 2002.
4. Czumaj A. and Vocking B. Tight bounds for worst-case equilibria. In Proc. of the 13thACM-SIAM Symposium on Discrete Algorithms (SODA ’02), pages 413–420, 2002.
5. Dorn W.S. Duality in quadratic programming.Quarterly of Applied Mathematics,18(2):155–162, 1960.
6. Even-Dar E. and Kesselman A. and Mansour Y. Convergence time to nash equilibria. InProc. of the 30th International Colloquium on Automata, Languages and Programming(ICALP ’03), pages 502–513. Springer-Verlag, 2003.
7. Fabrikant A. and Papadimitriou C. and Talwar K. The complexity of pure nash equilibria. InProc. of the 36th ACM Symp. on Theory of Computing (STOC ’04), 2004.
8. Feldmann R. and Gairing M. and Lucking T.and Monien B. andRode M. Nashification andthe coordination ratio for a selfish routing game. InProc. of the 30th International Collo-quium on Automata, Languages and Programming (ICALP ’03), pages 514–526. Springer-Verlag, 2003.
9. Fotakis D. and Kontogiannis S. and Koutsoupias E. and Mavronicolas M. and Spirakis P. Thestructure and complexity of nash equilibria for a selfish routing game. InProc. of the 29thInternational Colloquium on Automata, Languages and Programming (ICALP ’02), pages123–134. Springer-Verlag, 2002.
10. Gairing M. and Lucking T. and Mavronicolas M. and MonienB. and Spirakis P. Extremenash equilibria. In8th Italian Conference on Theoretical Computer Science (ICTCS’03).Springer-Verlag, 2003.
11. Hochbaum D. and Shmoys D. A polynomial approximation scheme for scheduling on uni-form processors: Using the dual approximation approach.SIAM J. Comput., 17(3):539–551,1988.
12. Hoeffding W. Probability inequalities for sums of bounded random variables.Journal of theAmerican Statistical Association, 58(301):13–30, 1963.
13. Koutsoupias E. and Mavronicolas M. and Spirakis P. Approximate equilibria and ball fusion.ACM Transactions on Computer Systems, 36:683–693, 2003.
14. Koutsoupias E. and Papadimitriou C. Worst-case equilibria. In Proc. of the 16thAnnualSymposium on Theoretical Aspects of Computer Science (STACS ’99), volume LNCS 1563,pages 404–413. Springer-Verlag, 1999.
15. Lucking T. and Mavronicolas M. and Monien B. and Rode M. ANew Model for SelfishRouting. InProc. of the 21stAnnual Symposium on Theoretical Aspects ofComputer Science(STACS ’04), page to appear . Springer-Verlag, 2004.
16. Lucking T. and Mavronicolas M. and Monien B. and Rode M. and Spirakis P. and Vrto I.Which is the worst-case nash equilibrium? In26th International Symposium on Mathemati-cal Foundations of Computer Science (MFCS’03), pages 551–561. Springer-Verlag, 2003.
17. Mavronicolas M. and Spirakis P. The price of selfish routing. In Proc. of the 33rd ACMSymp. on Theory of Computing (STOC ’01), pages 510–519, 2001.
18. Milchtaich I. Congestion games with player-specific payoff functions.Games and EconomicBehavior, 13:111–124, 1996.
19. Monderer D. and Shapley L. Potential games.Games and Economic Behavior, 14:124–143,1996.
20. Papadimitriou C. and Steiglitz K.Combinatorial Optimization: Algorithms and Complexity.Prentice-Hall, Inc., 1982.
21. Rosenthal R.W. A class of games possessing pure-strategy nash equilibria. InternationalJournal of Game Theory, 2:65–67, 1973.
22. Roughdarden T. and TardosE. How bad is selfish routing?J. Assoc. Comput. Mach.,49(2):236–259, 2002.
23. Roughgarden T. The price of anarchy is independent of thenetwork topology. InProc. ofthe 34th ACM Symp. on Theory of Computing (STOC ’02), pages 428–437, 2002.





























