Embed Size (px)
Citation preview

Computers & Industrial Engineering 58 (2010) 332–341
Contents lists available at ScienceDirect
Computers & Industrial Engineering
journal homepage: www.elsevier .com/ locate/caie
Minimum cost path location for maximum traffic capture
Gabriel Gutiérrez-Jarpa a,b, Macarena Donoso a,c, Carlos Obreque d, Vladimir Marianov e,*
a Graduate Program, Department of Systems Engineering, Pontificia Universidad Católica de Chile, Santiago, Chileb Department of Industrial Engineering, Universidad Católica de la Santísima Concepción, Chilec Department of Management, Universidad Diego Portales, Santiago, Chiled Department of Industrial Engineering, Universidad del Bío-Bío, Concepción, Chilee Department of Electrical Engineering, Pontificia Universidad Católica de Chile, Santiago, Chile
a r t i c l e i n f o a b s t r a c t
Article history:Received 13 February 2009Received in revised form 18 November 2009Accepted 19 November 2009Available online 27 November 2009
Keywords:Network designCoveringInteger programming
0360-8352/$ - see front matter � 2009 Elsevier Ltd. Adoi:10.1016/j.cie.2009.11.010
* Corresponding author. Tel.: +56 2 3544974; fax: +E-mail addresses: [email protected] (G. Gutiér
@udp.cl (M. Donoso), [email protected] (C. ObreqMarianov).
A free path (with no preset extreme nodes) is located on a network, in such a way as to minimize the costand maximize the traffic captured by the path. Traffic between a pair of nodes is captured if both nodesare visited by the path. Applications are the design of the route and locations of mailboxes for a localpackage delivery company, or the design of bus or subway lines, in which the shape of the route andthe number of stops is determined by the solution of the optimization problem. The problem also appliesto the design of an optical fiber network interconnecting WiFi antennas in a university campus. We pro-pose two models and an exact solution method. Computational experience is presented for up to 300nodes and 1772 arcs, as well as a practical case for the city of Concepción, Chile.
� 2009 Elsevier Ltd. All rights reserved.
1. Introduction
We address the problem faced by a planner who needs to designa bus route, a light railway line or any transit system line, with theshape of a single path. This path must follow some already existingroads. Public approaches the stops, which are the nodes of thepath. Customers do not use the bus line unless there are stopswithin a threshold distance of their origin and destination loca-tions. There is an estimation of the traffic demanded between dif-ferent pairs of nodes, and the stops or stations are openeddepending on the desired traffic capture.
Another example is the design of a route and the location ofmailboxes for a mail and package delivery company that operateswithin a city. A single vehicle carries packages between pairs ofmailboxes (an origin and a destination mailbox), located by thesame company. The solution of the model contains the locationof the mailboxes and the shape of the route.
A further example is the deployment of a WiFi network in a uni-versity campus, in which the access points or antennas are con-nected to the network through an optical fiber bus. The antennasare the active nodes on the path, receiving and transmitting knownamounts of voice and data traffic to fixed or mobile devices that arewithin a threshold distance of the nodes, i.e. within a ‘‘hot spot”,and either coming from or going to known nodes of the network.
ll rights reserved.
56 2 5522563.rez-Jarpa), macarena.donosoue), [email protected] (V.
The optical fiber bus must use an existing duct system for itsdeployment. The number of antennas to be installed and connectedthrough the path is defined by the solution of the model, depend-ing on the traffic carried by these antennas. Both problems aresolved by locating an adequate path on a network.
Many similar problems, also consisting of locating a path on anetwork have been described in the literature (Labbé, Laporte, &Rodríguez, 1998; Mesa & Boffey, 1996). If the network representsa geographical region where there is population with certainneeds, and it is assumed that the path serves these needs, it canbe located so that it is within a threshold distance of part of thepopulation (a ‘‘covering path”); or it can be designed so to mini-mize its average distance to the customers – in this case, all the de-mand is assumed to be satisfied – (a ‘‘median path”). Practicalexamples of these problems can be found in transportation andtelecommunications networks, hydraulic systems, and electricalnetworks. Our application falls in the category of the covering pathproblems.
The maximum covering–shortest path problem (MCSPP) wasfirst introduced by Current, ReVelle, and Cohon (1985). In thisproblem, a path needs be built between an origin and a destination,with two objectives in sight: minimum construction cost of theedges of the path, and maximum node demand satisfaction. A de-mand or customer is defined as satisfied or covered, when it iseither on the path or within a threshold distance from it. Note thatcoverage is defined for single demand nodes, as opposed to pairs ofnodes (traffic). The MCSPP has been extended to a multipath ver-sion by Boffey and Narula (1998), who also provide a good reviewof the literature.
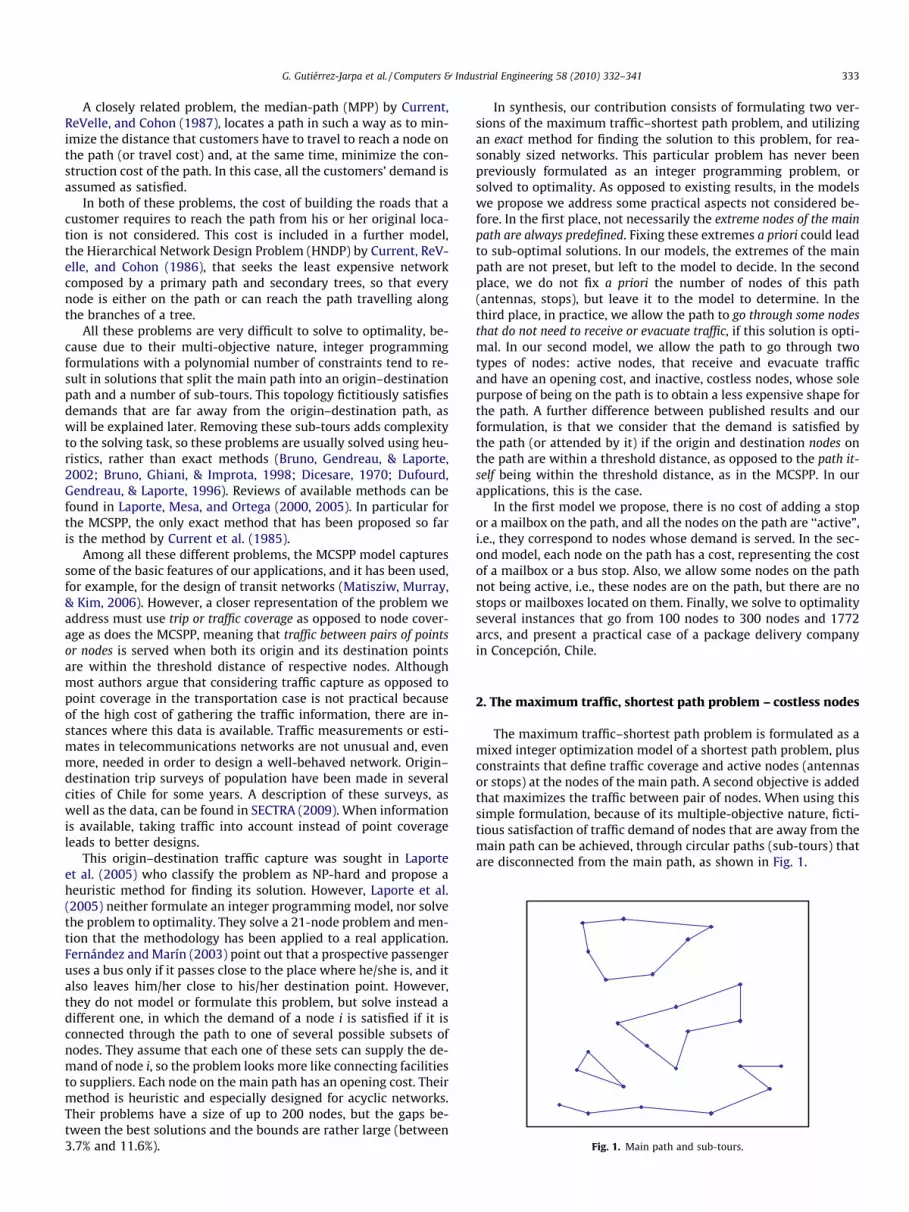
Fig. 1. Main path and sub-tours.
G. Gutiérrez-Jarpa et al. / Computers & Industrial Engineering 58 (2010) 332–341 333
A closely related problem, the median-path (MPP) by Current,ReVelle, and Cohon (1987), locates a path in such a way as to min-imize the distance that customers have to travel to reach a node onthe path (or travel cost) and, at the same time, minimize the con-struction cost of the path. In this case, all the customers’ demand isassumed as satisfied.
In both of these problems, the cost of building the roads that acustomer requires to reach the path from his or her original loca-tion is not considered. This cost is included in a further model,the Hierarchical Network Design Problem (HNDP) by Current, ReV-elle, and Cohon (1986), that seeks the least expensive networkcomposed by a primary path and secondary trees, so that everynode is either on the path or can reach the path travelling alongthe branches of a tree.
All these problems are very difficult to solve to optimality, be-cause due to their multi-objective nature, integer programmingformulations with a polynomial number of constraints tend to re-sult in solutions that split the main path into an origin–destinationpath and a number of sub-tours. This topology fictitiously satisfiesdemands that are far away from the origin–destination path, aswill be explained later. Removing these sub-tours adds complexityto the solving task, so these problems are usually solved using heu-ristics, rather than exact methods (Bruno, Gendreau, & Laporte,2002; Bruno, Ghiani, & Improta, 1998; Dicesare, 1970; Dufourd,Gendreau, & Laporte, 1996). Reviews of available methods can befound in Laporte, Mesa, and Ortega (2000, 2005). In particular forthe MCSPP, the only exact method that has been proposed so faris the method by Current et al. (1985).
Among all these different problems, the MCSPP model capturessome of the basic features of our applications, and it has been used,for example, for the design of transit networks (Matisziw, Murray,& Kim, 2006). However, a closer representation of the problem weaddress must use trip or traffic coverage as opposed to node cover-age as does the MCSPP, meaning that traffic between pairs of pointsor nodes is served when both its origin and its destination pointsare within the threshold distance of respective nodes. Althoughmost authors argue that considering traffic capture as opposed topoint coverage in the transportation case is not practical becauseof the high cost of gathering the traffic information, there are in-stances where this data is available. Traffic measurements or esti-mates in telecommunications networks are not unusual and, evenmore, needed in order to design a well-behaved network. Origin–destination trip surveys of population have been made in severalcities of Chile for some years. A description of these surveys, aswell as the data, can be found in SECTRA (2009). When informationis available, taking traffic into account instead of point coverageleads to better designs.
This origin–destination traffic capture was sought in Laporteet al. (2005) who classify the problem as NP-hard and propose aheuristic method for finding its solution. However, Laporte et al.(2005) neither formulate an integer programming model, nor solvethe problem to optimality. They solve a 21-node problem and men-tion that the methodology has been applied to a real application.Fernández and Marín (2003) point out that a prospective passengeruses a bus only if it passes close to the place where he/she is, and italso leaves him/her close to his/her destination point. However,they do not model or formulate this problem, but solve instead adifferent one, in which the demand of a node i is satisfied if it isconnected through the path to one of several possible subsets ofnodes. They assume that each one of these sets can supply the de-mand of node i, so the problem looks more like connecting facilitiesto suppliers. Each node on the main path has an opening cost. Theirmethod is heuristic and especially designed for acyclic networks.Their problems have a size of up to 200 nodes, but the gaps be-tween the best solutions and the bounds are rather large (between3.7% and 11.6%).
In synthesis, our contribution consists of formulating two ver-sions of the maximum traffic–shortest path problem, and utilizingan exact method for finding the solution to this problem, for rea-sonably sized networks. This particular problem has never beenpreviously formulated as an integer programming problem, orsolved to optimality. As opposed to existing results, in the modelswe propose we address some practical aspects not considered be-fore. In the first place, not necessarily the extreme nodes of the mainpath are always predefined. Fixing these extremes a priori could leadto sub-optimal solutions. In our models, the extremes of the mainpath are not preset, but left to the model to decide. In the secondplace, we do not fix a priori the number of nodes of this path(antennas, stops), but leave it to the model to determine. In thethird place, in practice, we allow the path to go through some nodesthat do not need to receive or evacuate traffic, if this solution is opti-mal. In our second model, we allow the path to go through twotypes of nodes: active nodes, that receive and evacuate trafficand have an opening cost, and inactive, costless nodes, whose solepurpose of being on the path is to obtain a less expensive shape forthe path. A further difference between published results and ourformulation, is that we consider that the demand is satisfied bythe path (or attended by it) if the origin and destination nodes onthe path are within a threshold distance, as opposed to the path it-self being within the threshold distance, as in the MCSPP. In ourapplications, this is the case.
In the first model we propose, there is no cost of adding a stopor a mailbox on the path, and all the nodes on the path are ‘‘active”,i.e., they correspond to nodes whose demand is served. In the sec-ond model, each node on the path has a cost, representing the costof a mailbox or a bus stop. Also, we allow some nodes on the pathnot being active, i.e., these nodes are on the path, but there are nostops or mailboxes located on them. Finally, we solve to optimalityseveral instances that go from 100 nodes to 300 nodes and 1772arcs, and present a practical case of a package delivery companyin Concepción, Chile.
2. The maximum traffic, shortest path problem – costless nodes
The maximum traffic–shortest path problem is formulated as amixed integer optimization model of a shortest path problem, plusconstraints that define traffic coverage and active nodes (antennasor stops) at the nodes of the main path. A second objective is addedthat maximizes the traffic between pair of nodes. When using thissimple formulation, because of its multiple-objective nature, ficti-tious satisfaction of traffic demand of nodes that are away from themain path can be achieved, through circular paths (sub-tours) thatare disconnected from the main path, as shown in Fig. 1.

334 G. Gutiérrez-Jarpa et al. / Computers & Industrial Engineering 58 (2010) 332–341
In order to avoid these sub-tours in their maximal covering–shortest path problem, Current et al. (1985) proposed a procedurewhich consists in adding a sub-tour-breaking constraint each timea sub-tour appears in the solution, and solving the problem again,until a solution is found with no sub-tours. We apply an analogousprocedure to our maximum traffic–shortest path problem. It isworth mentioning that, for this particular problem, this approachturned out to be faster than a multicommodity approach as inObreque, Marianov, and Ríos (2008). In this last approach, a unitof flow is sent from an arbitrary origin to each one of the nodes thatare visited by the path. The flow paths force the breaking of thesub-tours. When using this multicommodity formulation, thenumber of flow variables is n3.
We assume that traffic information is available for each pair ofnodes (both ways traffic). In the case of a bus line, the demandoriginating from an area defined by a threshold distance of astop-candidate node can be aggregated and assigned to the nodeitself. For a package delivery company, the packages are actuallyoriginating from a region around each mailbox (we later extendthis coverage to the adjacent nodes). This demand can be forecast,as for example in Bruno et al. (2002). In a two-objective formula-tion, a shortest (or minimum cost) path is built, in such a waythat its shape maximizes the traffic carried by the path betweenpairs of nodes on the path. A traffic tij is carried by the systemwhen the path touches nodes i and j (not necessarily joined bya single link.) This is the total traffic going in both ways. Givena graph G = (N, E), where N is the set of nodes and E the set ofedges, each edge ( i, j) of the graph can contain an edge of theresulting main path. The cost of building an edge is cij. The nodesare the potential locations of the stops, mailboxes, or WiFi anten-nas. Any edge of the resulting path must coincide with an edge ofthe original network G, which could represent, for example, anexisting system of ducts.
Fixing a priori the origin and destination nodes of the pathcould lead to sub-optimal solutions. In order to obtain an optimalsolution, the extremes of the path are left free and their optimallocations found by the solution procedure. These end nodes canbe located on any node of the network (in limit cases, originand destination could co-locate on the same node). More in gen-eral, they could belong to origin and destination candidate nodesets V1 # N and V2 # N, respectively. If this were the case, thepath must start at a node in V1 and end at a node in V2.Let also V3 ¼ V1 \ V2.
We define two new nodes, O and D, not belonging to the ori-ginal node set N, denoted fictitious origin and fictitious destina-tion respectively. The fictitious origin O is connected to eachnode in V1 through fictitious, costless edges (O, j), j e V1, notbelonging to the original edge set E. In the solution, exactly onefictitious edge will connect the fictitious node O to a node inV1. This last node becomes the location of the actual origin. Sim-ilarly, a fictitious edge will connect exactly one node in the set V2
to the fictitious destination D, and that node in V2 becomes theactual destination.
We use the following variables:
xij ¼1 if edge ði; jÞ belongs to the path0 otherwise
�
yi ¼1 if node i is visited by the path0 otherwise
�
v ij ¼1 if traffic from nodes i and j is carried by the path0 otherwise
�
The model follows:
P1: MinimizeXði;jÞ2E
cijxij ð1Þ
MaximizeX
i;j2N;i>j
tijv ij ð2Þ
s:t:Xj2V1
xOj ¼ 1 ð3ÞXi2V2
xiD ¼ 1 ð4Þ
xOj þPði;kÞ2Ej
xik ¼ 2yj 8j 2 V1 n V3
Pði;kÞ2Ej
xik þ xjD ¼ 2yj 8j 2 V2 n V3
xOj þPði;kÞ2Ej
xik þ xjD ¼ 2yj 8j 2 V3
Pði;kÞ2Ej
xik ¼ 2yj 8j 2 N n ðV1 [ V2Þ
8>>>>>>>>>><>>>>>>>>>>:
ð5Þ
vkj 6 yk 8k; j 2 N; k > j ð6Þv ik 6 yk 8k; i 2 N; i > k ð7ÞXfi;jg2EðSÞ
xij 6 jSj � 1 8S # N : 3 6 jSj 6 jNj � 1 ð8Þ
xij; yi 2 f0;1g ð9Þ0 6 v ik 6 1 8i; k 2 N; i > k
Objective (1) minimizes the path construction cost. Objective (2)maximizes traffic capture, i.e., traffic whose both origin and desti-nation nodes are on the path. Constraint (3) requires exactly oneedge connecting the fictitious origin with a node in the subset V1
of the network, in which the actual origin of the path will be sited.Constraint (4) requires exactly one edge connecting the fictitiousdestination with a node in the subset V2 of the network, wherethe real destination will be located. Constraint (5) forces continuityof the path, and defines the nodes whose traffic demand is satisfiedi.e., nodes on the path. Note that Ej # E is the subset of edges inci-dent to node j. Constraints (6) and (7) require that no traffic is cap-tured or satisfied, unless its origin and destination nodes are on thepath. Note that if the path visits a pair of nodes, the traffic in bothways is captured, so it is enough to define the variables vkj fork > j. Constraint (8) is the sub-tour breaking constraint. In theseconstraints, E(S) is the set of all edges connecting any pair of nodesbelonging to the set S. Note that one of these constraints must bewritten for each subset of the set N with cardinality greater than2, which makes the number of constraints of the order of 2N. Con-straint (9) requires the appropriate type of value for the variables.There is no need to declare variables vik as binary, since they willtake binary values in the solution, due to the structure of the model.
Since including all the constraints (8) in the model is not practi-cal, we use a procedure consisting of relaxing these constraints, solv-ing the relaxed formulation by using Branch and Bound and, if sub-tours are found in the solution, the appropriate constraint (8) isadded and the augmented formulation solved again. This procedureis continued until no sub-tours are found, at which time the solutionis optimal. A separation algorithm is used that finds first all thenodes that are visited by the path that starts at the fictitious originand ends at the destination nodes (the main path). Then, all nodeswith a positive value of the variable yi are identified. Each such nodebelongs to a sub-tour that is not connected to the main path, which iseasily identified by the separation algorithm. For each one of thesesub-tours, a constraint (8) is added, and the problem solved again.
The previous formulation can be tailored to include additionalconstraints, representing particular requirements of each practicalcase. For example, if the planner wants the stops to be not closer toeach other than a threshold value, as in the case of a subway line, acandidate edge variable xij would be defined only when the associ-ated length is greater than this threshold value. The total length ofthe path could be restricted; some nodes could be forced to belong

G. Gutiérrez-Jarpa et al. / Computers & Industrial Engineering 58 (2010) 332–341 335
to the path, or the path could be required to share a node with anexisting network (for example, to allow transfers); the number ofstops or stations could be limited; and so on.
3. The maximum traffic, shortest path problem with fixedcharges
Although in some cases the nodes do not have an associatedcost, there are some practical situations in which ‘‘active” nodeson the main path have fixed costs of being established (considerfor the moment that a bus stop is an active node, as opposed tocostless nodes that could be on the path but do not deal withany traffic leaving or entering the path). In this case, an obviouschoice is to add an objective minimizing active node costs. How-ever, if all nodes on the path are considered as active and openedat a fixed cost, even if there is no traffic associated to some of them,the shape of the path will avoid a node if its activating cost (open-ing a stop or installing an antenna) is higher than the benefit ofcapturing the marginal traffic attended by that node. Avoiding orgoing around a low-traffic node, in turn, could produce longerpaths than needed. In order to improve the solutions, we formulatea variation on the previous model, in which active nodes (antennas,stops, and so on) have a cost, but the path can include inactivenodes, i.e., nodes that can be on the path without implying a cost,since these nodes are not traffic sources or sinks. As a consequence,the path will be allowed to go through inactive nodes, if it is advan-tageous from the viewpoint of the shape and cost of the path.
We define the new parameter Kj, cost of building an active nodeat j, and the new variable zj, that is 1 if the path includes a non-ac-tive node j, and zero otherwise. The model is as follows:
P2: MinimizeXði;jÞ2E
cijxij þXj2N
Kjyj ð10Þ
MaximizeX
i;j2N;i>j
tijv ij ð11Þ
s:t:Xj2V1
xOj ¼ 1 ð12ÞXi2V2
xiD ¼ 1 ð13Þ
xOj þPði;kÞ2Ej
xik ¼ 2ðyj þ zjÞ 8j 2 V1 n V3
Pði;kÞ2Ej
xik þ xjD ¼ 2ðyj þ zjÞ 8j 2 V2 n V3
xOj þPði;kÞ2Ej
xik þ xjD ¼ 2ðyj þ zjÞ 8j 2 V3
Pði;kÞ2Ej
xik ¼ 2ðyj þ zjÞ 8j 2 N n ðV1 [ V2Þ
8>>>>>>>>><>>>>>>>>>:
ð14Þ
yj þ zj 6 1 8j 2 N ð15Þvkj 6 yk 8k; j 2 N; k > j ð16Þv ik 6 yk 8k; i 2 N; i > k ð17ÞXfi;jg2EðSÞ
xij 6 jSj � 1 8S # N : 3 6 jSj 6 jNj � 1 ð18Þ
xij; yi; zj 2 f0;1g 8i; j ð19Þ0 6 v ik 6 1 8i; k 2 N; i > k
Table 1Results of the procedure for 100 and 200-node networks, costless nodes.
Instance Edges Nodes on the path Max. Nr. of iterations Av. Time [s]
P01-100 198 88-100 10 69.85P02-100 193 92-100 2 13.91P03-100 198 89-100 6 29.67P04-100 196 91-100 2 283.52P05-100 196 82-100 5 484.95P06-200 796 159-200 7 1794.65P07-200 779 145-200 10 3149.60P08-200 792 155-200 17 2269.48
Now, the cost objective has two terms, corresponding to edgeand node costs. Constraint (14) requires that the path goes throughactive or inactive nodes and each node on the path is connected toexactly two edges. Constraint (15) precludes a node being activeand inactive, at the same time.
4. Computational experience
4.1. First model: costless nodes
We first solved a number of standard test problems from Beas-ley (1990), originally developed for testing algorithms for the unca-pacitated p-median problem, because the test instances used byother authors for similar network design problems are in generalsmaller, and mostly unavailable. The traffic demand was generatedusing a (20; 10) normal distribution. The active node costs werealso generated using a random number generator. We used CPLEX9.0 and AMPL on a Pentium 4 computer, with 512 MB RAM,2.4 GHz. The multiobjective model was solved using the weightingmethod, i.e., minimizing a linear combination of the objectives. Byusing different values of the relative weights, we represented dif-ferent requirements of traffic throughput (or capture).
For each instance of the problem, we found the non-dominatedsolutions. Table 1 shows the results for the first model. Each rowshows the statistics for several non-dominated solutions. The firstcolumn shows the instance (using the names in Beasley, 1990), thesecond column the number of edges in the base network, the thirdcolumn shows the lowest and highest number of active nodes(antennas, stops, mailboxes) in the solutions. The fourth columnindicates the maximum number of iterations (added constraints)required by the procedure for that instance. The following four col-umns show the statistics of the solution time: Average, StandardDeviation, Maximum and Minimum. The last column shows thenumber of non-dominated solutions that were found for that par-ticular instance of the multiobjective problem.
Fig. 2 shows the trade-off curves for one of the 200-node in-stances. The remaining instances show very similar curve shapes.
Since the trade-off curve is very close to a straight line, it wasvery difficult to find the non-dominated solutions, even using therobust Noninferior Set Estimation Method (NISE) of Cohon (1978)for multiobjective problems. Note that, since the NISE method usesweighting of the objectives, it may miss some of the non-domi-nated solutions. If there is the need to find all non-dominated solu-tions, the constraint approach can be used (Cohon, 1978). In thisapproach, one of the objectives is constrained, while the remainingobjective is optimized. For example, the cost objective can be con-strained to be less than a value C, and the traffic maximized. Theproblem is solved as many times as needed, with different valuesof C. In practice, constraining an objective makes the problemharder to solve using branch and bound, since a knapsack-typeconstraint is added. In consequence, a recommended solution ap-proach is as follows: use first the NISE method; once the trade-off curve is found, explore it for good candidate solutions and, onceone such solution is chosen as a good candidate, explore its neigh-
Time St. Dev. Max. time Min. time Nr. of non-dominated solutions
68.99 193.66 0.11 79.34 23.44 0.09 6
31.16 75.61 0.08 5333.76 689.19 0.16 4753.19 1781.53 0.12 5
2774.89 9261.19 0.73 125438.94 15868.88 1.95 163484.78 10874.59 0.34 15

0%
20%
40%
60%
80%
100%
120%
0 500 1000 1500 2000 2500
Tra
ffic
Cap
ture
Cost
Fig. 2. Trade-off curve for network P07-200.
1
3
6
7
2
11
12
1419
20
215
4
15
17
18
8
9 13
10
16
Fig. 3. Test network.
(a) Weight = Large
(c) Weight = 1.2895
16
1
3
6
7
2
11
12
1419
20
215
4
15
17
18
8
9 13
10
1
3
6
7
2
11
12
1419
20
215
4
15
17
18
8
9 13
10
16
Fig. 4. Path shapes for different w
336 G. Gutiérrez-Jarpa et al. / Computers & Industrial Engineering 58 (2010) 332–341
borhood using the constraint method. For example, if among thenon-dominated solutions a good candidate has a cost of say3000, and the neighboring solutions have costs 2700 and 3450,use the following constraint:Xði;jÞ2E
cijxij þXj2N
Kjyj 6 C;
with values of C in the range [2700; 3450].In order to show the shapes of the resulting networks, we also
solved the smaller problem of Fig. 3, from Current et al. (1985),with a randomly generated traffic matrix.
Results are shown in Fig. 4. The shapes of the resulting networksare suitable for fiber optics bus networks, or package delivery net-works. However, in the case of subway lines or bus lines, custom-ers’ travel time could be too long. Unfortunately, in order tominimize customers’ travel time, a multicommodity formulationis required, because the formulation we use in this paper doesnot allow measuring travel times. A multicommodity formulationrequires a very large number of variables and constraints.
4.2. Second model: allowing active and inactive nodes
For the second model, we used the same data, except that boththe mean and variance of the traffic and node cost were set to10,000. Table 2 shows the results for different instances. A thirdcolumn was added, showing the range of figures of inactive nodesin these runs.
As the table shows, the run times of this procedure are reason-able, even for a 300-node network.
The horizontal axis in Fig. 5 shows the solutions, in an increas-ing traffic capture order. The node cost and the edge cost are inthousands. It is interesting to note that, as the weight on the trafficcapture increases, there are several changes. In the first place, the
(b) Weight = 1.5573
(d) Weight = 0.9772
1
3
6
7
2
11
12
1419
20
215
4
15
17
18
8
9 13
10
16
1
3
6
7
2
11
12
1419
20
215
4
15
17
18
8
9 13
10
16
eights on the traffic objective.

Table 2Results of the procedure for 100, 200 and 300-node networks, with fixed charges.
Instance Edges Active nodes Inactive nodes Max. iterations Av. time [s] Time St. Dev. Max. time Min. time Nr. of non-dominated solutions
P01-100 198 33-100 19-0 8 2.81 4.06 20.73 0.11 24P02-100 193 54-100 20-0 2 3.10 3.39 16.36 0.08 22P03-100 198 3-100 16-0 4 2.96 2.11 8.12 0.08 22P04-100 196 14-100 33-0 8 4.23 7.81 40.52 0.14 29P05-100 196 68-100 15-0 5 4.43 9.72 41.61 0.17 17P06-200 796 13-200 47-0 8 50.92 47.09 196.30 0.38 47P07-200 779 31-200 49-0 25 84.73 151.01 945.20 0.45 52P08-200 792 96-200 37-0 10 105.70 160.86 913.50 0.70 31P09-200 785 90-200 41-0 9 87.37 96.51 457.60 0.25 36P10-200 786 16-200 45-0 10 55.98 68.60 405.30 0.44 48P011-300 1172 197-300 48-0 21 223.23 219.35 846.90 3.81 38
0
1000
2000
3000
4000
5000
6000
0
50
100
150
200
250
300
350
400
1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37
Edg
e co
st
Nod
e co
st a
nd n
umbe
r; c
aptu
red
traf
fic
Solutions in increasing order of traffic capture
Inactive nodes
Captured Traffic (%)
Active nodes
Edge cost
Node cost
Fig. 5. 300-Node network, fixed charge.
(a) Node cost: 17821. Edge cost: 407. (b) Node cost: 44138. Edge cost: 448.
1
3
6
7
2
11
12
1419
20
21
185
4
15
178
9 13
10
16
1
3
6
7
2
11
12
1419
20
21
15
10
54
17
18
8
9 13
16
Fig. 6. Path shapes: (a) Dark nodes are inactive. (b) All nodes are active.
G. Gutiérrez-Jarpa et al. / Computers & Industrial Engineering 58 (2010) 332–341 337
number of total nodes on the path increases, and the proportion ofactive nodes increases faster than the percentage of inactive nodes,as expected. Note also that in most of the solutions, except forthose with a high weight on traffic, inactive nodes are present,which gives an indication of their usefulness in term of improvingthe solutions. Note also that the number of active nodes increasesslower than the investment on them. This is because, as the weighton traffic increases, the model tends to open the least expensivenodes first and the most expensive later. As a consequence, the
marginal cost of node opening keeps increasing as the traffic cap-ture is forced to increase.
A further experiment was done in order to show how, in somecases, the inclusion of inactive nodes improves the solutions. In thenetwork of Fig. 3, we required capture of the traffic strictly be-tween nodes 5, 9, 13, 15, 16 and 17. Note that now, only the costobjective needs to be optimized, since the traffic is constrained.In our definition of the model, other nodes could be included inthe path only if it is needed for its continuity. Fig. 6a shows the

(b)(a)
1
2 3
4
5
6
7
8
9
10
11
12
45
40 30 32 67
28 28 40 37 45 60
35 28
35
50
13
14 15 70
50
47
27 67 70
40
70 17
16
40
40 47
18
19
63
70 35
20
21
70
55 27
22
23
43
37
28
62
25
24
27
26
33
32
28
29
31 30
35 34 36
12
28
40
98
36
30
25
43
25
30
45 35
40
40
45
56
48
30
30
35
35
68
45
42
43
40
41
39
38
37
62
35
24
25
30
25
60
25
30
20
25
24
48
44
46
45
47
48
49
37
30
35
31
27
47
37
37
50
35
34
49
55
53
54
52
51
50
37
27
49
32
24
60
47
50
36
49
5056
58
57
59
60
61
35
30
43
40
25
24
45
42
72
40
38
6247 38
61
63 64
66 67 65
70 69
7374
71
45
46 62
55
52
68
32
45
41
55
59
4
90
72
35 40
25
52
45
60 52 45
65 65
23 65 75
76
77
78 79
80
55 10
69
65
65 45
80
78 36
51
81
82
98
66
80
75
83 84
60 37
68 70
85
86
45
33
75
70 80
87
90
91
88 89
87
72 10
80
55 80
75
50
40
94
97
95
92
93
96
50 50
60
65 3034
40
25
40
58
65
7085
98 9967 60
81 85
55
55 40
100
130
110
40
30
40
43
102
101
106
104
103
105
107
100
108
1
2 3
4
5
6
7
8
9
10
11
12
45
40 30 32 67
28 28 4037 45 60
3528
35
50
13
14 1570
50
47
276770
40
7017
16
40
40 47
18
19
63
7035
20
21
70
5527
22
23
43
37
28
62
25
24
27
26
33
32
28
29
31 30
35 3436
12
28
40
98
36
30
25
43
25
30
45 35
40
40
45
56
48
30
30
35
35
68
45
42
43
40
41
39
38
37
62
35
24
25
30
25
60
25
30
20
25
24
48
44
46
45
47
48
49
37
30
35
31
27
47
37
37
50
35
34
49
55
53
54
52
51
50
37
27
49
32
24
60
47
50
36
49
50 56
58
57
59
60
61
35
30
43
40
25
24
45
42
72
40
38
6247
38
61
6364
6667 65
70 69
7374
71
45
4662
55
52
68
32
45
41
55
59
4
90
72
3540
25
52
45
605245
65 65
236575
76
77
78 79
80
5510
69
65
6545
80
7836
51
81
82
98
66
80
75
83 84
6037
68 70
85
86
45
33
75
7080
87
90
91
88 89
87
72 10
80
5580
75
50
40
94
97
95
92
93
96
50 50
60
65 30 34
40
25
40
58
65
70 85
98 9967 60
81 85
55
55 40
100
130
110
40
30
40
43
102
101
106
104
103
105
107
100
108
Fig. 7. (a) Only active, costless nodes. Covered traffic: 67.59%. Mailboxes: 55. Path length: 20,280 m. (b) Active and inactive (dark) nodes. Covered traffic: 67.06%. Mailboxes:53. Path length: 29,390 m.
338 G. Gutiérrez-Jarpa et al. / Computers & Industrial Engineering 58 (2010) 332–341
solution when inactive nodes are allowed. Fig. 6b shows the leastexpensive solution to the problem of capturing the traffic of thesame nodes, but without allowing any inactive nodes.
As Fig. 6 shows, the cost of the solution when inactive nodes areallowed is 18,228 units, while the cost of the solution with no inac-tive nodes allowed is 44,586 units.
5. A practical case
We analyzed the case of a private mail and small package deliv-ery company that operates locally in the city of Concepción, Chile.Concepción is located some 500 km south of the capital city, Santi-ago. The company needs to compare possible routes for a vehicle,and mail box locations (nodes) for different demand capture sce-narios. Each mailbox is located inside a store or house. There is acost for the company of siting and operating mailboxes, includingpayments to the storeowner or house resident for receiving the let-ters and packages from the senders and handling them to theirrecipients. This cost is not known a priori (it depends on the nego-tiation with the storeowner or the house resident), and it has beenassumed to be uniformly distributed between 1 and 100 units. Theroute visits all the mailboxes, and it can include inactive nodeswhere there is no need for stopping for distribution or collection.The total demand has been estimated as 179,675 letters/smallpackages, and it has been distributed among origin–destinationpairs proportionally to the last known number of travels betweenorigin destination points in the city (SECTRA, 2009). The city hasbeen divided into 108 nodes and 192 edges. Each edge is definedover an existing street.
For this problem, we used a PC with an Intel Core 2 CPU, 1 GBRAM, 1.85 GHz. Fig. 7 compares the situation when no inactivenodes are allowed and active nodes have no cost, to that in whichinactive nodes are allowed. In the figure, the distances are in mul-tiples of 10 m.
An analysis of Fig. 7 shows that when inactive nodes are al-lowed, fewer mailboxes are needed for the same traffic capture.Also, the routes cover a larger area – at the expense of a higherroute cost.
Table 3 shows the results for different weights on the trafficobjective, when inactive nodes are allowed. As the Table shows,there are a large number of non-inferior solutions, ranging from2 mailboxes and traffic coverage of 2.4%, to 104 mailboxes, cover-ing over 97% of the traffic (at a higher cost). Column 3 in the tableshows how, at first, the number of inactive nodes increases as moreimportance (weight) is given to traffic capture. This is due to thefact that the model does not activate nodes that, being on theroute, have an incoming or outgoing package traffic that does notjustify the location of a mailbox. However, as the importance oftraffic capture increases, more nodes (mailboxes) become active,even those with low traffic.
A question arises after looking at these solutions: Is it possibleto improve the shape of the route or the cost of the solution byallowing a mailbox to serve the traffic of adjacent nodes or forcingmailbox closeness requirements? In order to answer this question,we solved two modified versions of the basic model. In these mod-ified versions, we assume that each mailbox covers also neighbor-ing or adjacent nodes, i.e., customers are willing to travel to thenext node in order to use the service – or mailbox keepers are paidto collect and deliver packages at neighboring nodes. In the firstversion, each mailbox captures the traffic of the node where it islocated and the nodes that are edge-adjacent to it, no matter whattheir distance is. In the second version, customers are willing totravel to the mailbox node from adjacent nodes only if it is closerthan 600 m. Coverage of adjacent nodes is included in the modelby modifying constraints (16) and (17):
vkj 6Xi2Nk
yi 8k; j 2 N; k > j ð160 Þ

Table 3Practical case in Concepción, Chile. 108 nodes, 192 edges.
Weight Active nodes Inactive nodes Covered traffic (%) Edge costs Node costs Nr. of iterations Time (s)
0.11213737 2 0 2.38 43 406 0 0.550.12660913 4 0 8.56 98 1626 1 1.590.17599044 9 4 15.22 553 2909 9 13.230.20145594 10 3 18.28 553 3908 0 3.420.20606806 34 13 44.73 1948 12,196 0 1.780.22911885 35 12 45.32 1948 12,434 19 157.220.23405210 49 14 61.46 2599 18,433 0 7.000.24880621 50 15 62.53 2669 18,841 0 1.880.24973356 53 15 67.06 2939 20,594 0 1.620.29099974 56 14 71.05 2988 22,385 0 1.220.31720183 57 13 72.23 2988 23,052 0 0.880.32164540 58 14 73.47 3198 23,558 0 0.970.32686607 59 13 74.33 3198 24,057 0 1.060.33207711 60 12 75.54 3198 24,771 4 4.420.33695976 61 11 76.75 3198 25,493 0 1.440.33876293 62 10 77.90 3204 26,188 0 2.230.35088403 63 10 79.27 3236 26,994 2 5.660.35927152 66 13 80.66 3509 27,604 0 1.640.36612824 65 12 81.29 3355 28,177 1 2.980.37626962 66 11 82.69 3355 29,119 0 1.300.42524418 68 14 83.32 3603 29,313 1 2.840.42954352 69 13 84.59 3603 30,293 0 1.190.43268708 70 13 85.28 3643 30,788 0 1.220.44118670 71 14 86.39 3670 31,634 5 3.980.47679478 72 13 87.38 3675 32,457 0 0.950.50146056 73 12 87.92 3675 32,944 0 0.920.53007993 75 10 88.73 3678 33,687 0 0.860.57787859 76 9 89.25 3678 34,201 0 0.640.63701068 77 8 90.10 3678 35,164 0 0.480.67305360 78 7 90.50 3678 35,633 0 0.670.71626667 79 7 91.19 3734 36,441 0 0.800.76908729 80 6 91.54 3734 36,920 0 0.800.86325879 82 5 92.52 3773 38,373 2 2.880.88321168 83 5 93.01 3801 39,110 0 0.950.92481581 84 5 93.28 3890 39,466 8 7.840.96505163 85 4 93.64 3890 40,070 0 0.980.99261084 86 4 93.99 3967 40,604 0 0.781.01452937 87 3 94.41 3967 41,365 0 0.951.06559917 88 3 94.87 3981 42,196 4 2.471.54006772 90 3 95.53 4052 43,940 1 1.271.67700308 91 3 95.85 4085 44,821 0 0.502.33852364 94 3 96.31 4293 46,048 0 0.532.60052910 95 2 96.42 4293 46,514 0 0.502.89183223 96 2 96.52 4357 46,967 3 1.193.10037879 97 2 96.71 4365 47,949 0 0.733.47045455 98 2 96.82 4439 48,522 1 1.394.64400000 100 3 97.03 4758 49,774 4 1.625.63686534 102 1 97.24 4732 51,712 0 0.4710.41025641 103 0 97.29 4732 52,467 0 0.48Large 104 0 97.32 4795 53,273 15 2.61
G. Gutiérrez-Jarpa et al. / Computers & Industrial Engineering 58 (2010) 332–341 339
v ik 6Xj2Nk
yj 8k; i 2 N; i > k ð170 Þ
where for version 1 (edge-adjacency), Nk ¼ fj 2 N : ðk; jÞ 2 E _ðj; kÞ 2 Eg and for version 2 (edge-adjacency with distance limit),Nk ¼ fj 2 N : ðk; jÞ 2 E _ ðj; kÞ 2 E ^ dkj 6 600g. Fig. 8 shows the solu-tion for versions 1 and 2, for a weight of 0.2. In the figure, darknodes are inactive nodes on the route. As expected, when customersare willing to travel, it is possible to cover or capture far more trafficthan in the base case, using a few mailboxes. In fact, in version 1, 25mailboxes (and 29 inactive stops) capture 94.87% of the demand,and expectedly, in version 2, 24 mailboxes capture an 86.19% ofthe demand. Additionally, the routes are shorter. The run time forversion 1 was much longer (10,000 s) as compared to version 2(458 s).
Finally, we solved a version in which again, the traffic coverageis limited to those nodes that contain mailboxes, but the mail-boxes cannot be located closer to each other than a threshold dis-tance D, ranging from 200 to 600 m. A new constraint (20) wasadded:
yk þXj2Lk
yj 6 1 8k ð20Þ
where Lk ¼ fj 2 N : j – k; ðk; jÞ 2 E _ ðj; kÞ 2 E ^ dkj 6 Dg. Fig. 9 showsthe resulting network for a threshold distance of 300 m, and Table 4the details of the costs and run time for all distances. When thethreshold distance is 200 m or less, the solution is identical to thatof the unconstrained case. As the threshold distance increases, lessmailboxes are located, and the captured traffic decreases accord-ingly, because the required threshold distance excludes the possi-bility of nodes located close to each other becoming active, evenif their traffic is important. Finally, as the threshold distance ap-proaches 600 m, there are no open mailboxes, and the routedisappears.
Among these solutions, those that assume that the mailboxkeepers are willing to travel are the most cost effective, althoughthe final decision will depend on the negotiations between thekeepers and the company.
An analysis that involves progressive mailbox opening in time(by stages) is under study.

(b)(a)
1
2 3
4
5
6
7
8
9
10
11
12
45
40 30 32 67
28 28 4037 45
60
3528
35
50
13
14 1570
50
47
276770
40
7017
16
40
4047
18
19
63
7035
20
21
70
55 27
22
23
43
37
28
62
25
24
27
26
33
32
28
29
31 30
35 3436
12
28
40
98
36
30
25
43
25
30
45 35
40
40
45
56
48
30
30
35
35
68
45
42
43
40
41
39
38
37
62
35
24
25
30
25
60
25
30
20
25
24
48
44
46
45
47
48
49
37
30
35
31
27
47
37
37
50
35
34
49
55
53
54
52
51
50
37
27
49
32
24
60
47
50
36
49
50 56
58
57
59
60
61
35
30
43
40
25
24
45
42
72
40
38
6247
38
61
6364
6667 65
70 69
7374
71
45
4662
55
52
68
32
45
41
55
5990
72
3540
25
52
45
605245
65 65
236575
76
77
78 79
80
5510
69
65
6545
80
7836
51
81
82
98
66
80
75
83 84
6037
68 70
85
86
45
33
75
7080
87
90
91
88 89
87
72 10
80
5580
75
50
40
94
97
95
92
93
96
50 50
60
65 30 34
40
25
40
58
65
70 85
98 9967 60
81 85
55
55 40
100
130
110
40
30
40
102
101
106
104
103
105
107
100
108
43
1
2 3
4
5
6
7
8
9
10
11
12
45
40 30 32 67
28 28 40 37 45
60
35 28
35
50
13
14 15 70
50
47
27 67 70
40
70 17
16
40
40 47
18
19
63
70 35
20
21
70
55 27
22
23
43
37
28
62
25
24
27
26
33
32
28
29
31 30
35 34 36
12
28
40
98
36
30
25
43
25
30
45 35
40
40
45
56
48
30
30
35
35
68
45
42
43
40
41
39
38
37
62
35
24
25
30
25
60
25
30
20
25
24
48
44
46
45
47
48
49
37
30
35
31
27
47
37
37
50
35
34
49
55
53
54
52
51
50
37
49
32
24
60
47
50
36
49
5056
58
57
59
60
61
35
30
43
40
25
24
45
42
72
40
38
6247
38
61
63 64
66 67 65
70 69
73 74
71
45
46 62
55
52
68
32
45
41
55
59 90
72
35 40
25
52
45
60 52 45
65 65
2365 75
76
77
78 79
80
55 10
69
65
65 45
80
78 36
51
81
82
98
66
80
75
83 84
60 37
70
85
86
45
33
75
7080
87
90
91
88 89
87
72 10
80
55 80
75
50
40
94
97
95
92
93
96
50 50
60
653034
40
25
40
58
65
7085
98 9967 60
81 85
55
55 40
100
130
40
30
40
43
102
101
106
104
103
105
107
100
108
Fig. 8. Active and inactive (dark) nodes. Each active node captures traffic from adjacent nodes. (a) No distance limit. Mailboxes: 25. Covered traffic: 94.87%. (b) Distance limit600 m. Mailboxes: 24. Covered traffic 86.19%.
1
2 3
4
5
6
7
8
9
10
11
12
45
40 30 32 67
28 28 4037 45
60
35 28
35
50
13
14 1570
50
47
2767 70
40
70 17
16
40
40 47
18
19
63
70 35
20
21
70
5527
22
23
43
37
28
62
25
24
27
26
33
32
28
29
31 30
35 3436
12
28
40
98
36
30
25
43
25
30
4535
40
40
45
56
48
30
30
35
35
68
45
42
43
40
41
39
38
37
62
35
24
25
30
25
60
25
30
20
25
24
48
44
46
45
47
48
49
37
30
35
31
27
47
37
37
50
35
34
49
55
53
54
52
51
50
37
27
49
32
24
60
47
50
36
49
5056
58
57
59
60
61
35
30
43
40
25
24
45
42
72
40
38
6247
38
61
6364
6667 65
70 69
7374
71
45
4662
55
52
68
32
45
41
55
59
4
90
72
3540
25
52
45
60 52 45
65 65
2365 75
76
77
78 79
80
55 10
69
65
65 45
80
78 36
51
81
82
98
66
80
75
83 84
60 37
68 70
85
86
45
33
75
7080
87
90
91
88 89
87
72 10
80
5580
75
50
40
94
97
95
92
93
96
50 50
60
653034
40
25
40
58
65
7085
98 9967 60
81 85
55
55 40
100
130
40
30
40
43
102
101
106
104
103
105
107
100
108
Fig. 9. Active and inactive (dark) nodes. Closeness constraints, distance 300 m.Covered traffic: 36.74%.
Table 4Results for the problem with closeness constraints.
Threshold distance Active nodes Inactive nodes Covered traffic
20 56 14 71.0525 51 17 60.2630 39 18 36.7445 8 8 8.5260 1 0 0
340 G. Gutiérrez-Jarpa et al. / Computers & Industrial Engineering 58 (2010) 332–341
6. Conclusions
We propose two new problems: the maximum traffic capture –minimum cost problem with costless nodes which, as opposed tocapturing point demand, seeks to capture traffic between pairs ofnodes with a least expensive path, and the maximum traffic cap-ture – minimum cost problem with fixed costs, which determinesa least expensive path for maximum traffic capture, and locatedcertain active nodes that concentrate traffic, as well as inactivenodes that are on the path only for allowing cost reduction. In bothcases, the extreme nodes of the path are left to the model to decide.These problems arise in the design of optical fiber bus networks,single bus or subway lines, and distribution routes, although inthe transportation case the shapes obtained by our models donot minimize travel time, which would require a far more compli-cated model. An exact solution method is proposed for both prob-lems, which allows solving instances of a reasonably large size, andnumerical experience is reported, that shows that these modelsand procedure are suitable for pretty large problem instances.We expect to obtain some results for this problem, for the casein which the path capacity is limited.
Finally, we solve a practical case, in the city of Concepción,Chile, which illustrates the use of the proposed models as a deci-sion tool, and shows how the models can be modified to includepractical constraints and requirements.
The algorithm we use executes, at each step, a full branch andbound procedure. We are currently implementing a Branch and
(%) Edge costs Node costs Nr. of iterations Time (s)
2988 22,385 7 4.032929 20,792 3 3.022457 13,495 11 145.62
687 2882 4 102.970 0 1 8.44

G. Gutiérrez-Jarpa et al. / Computers & Industrial Engineering 58 (2010) 332–341 341
Cut algorithm that does not need solving the integer programmingproblem at each step. Instead, it solves the linear relaxation of theproblem and adds cutting planes that or facets, in such a way as tospeed up the search for integer solutions.
Acknowledgements
The authors gratefully acknowledge the partial support pro-vided by FONDECYT, Project Nr. 1070741, as well as the supportprovided by the Institute Complex Engineering Systems, throughGrants ICM-MIDEPLAN P-05-004-F and CONICYT FBO16.
References
Beasley, J. E. (1990). OR-Library: Distributing test problems by electronic mail.Journal of the Operational Research Society, 41(11), 1069–1072.
Boffey, B., & Narula, S. C. (1998). Models for multi-path covering-routing problems.Annals of Operations Research, 82, 331–342.
Bruno, G., Gendreau, M., & Laporte, G. (2002). Heuristic for the location of a rapidtransit line. Computers & Operations Research, 29, 1–12.
Bruno, G., Ghiani, G., & Improta, G. A. (1998). Multi-modal approach to the locationof a rapid transit line. European Journal of Operational Research, 104, 321–332.
Cohon, J. L. (1978). Multiobjective programming & planning. Mathematics in science &engineering. New York: Academic Press.
Current, J. R., ReVelle, C. S., & Cohon, J. L. (1985). The maximum covering/shortestpath problem: A multiobjective network design and routing formulation.European Journal of Operational Research, 21, 189–199.
Current, J., ReVelle, C. S., & Cohon, J. (1986). The hierarchical network designproblem. European Journal of Operational Research, 27, 57–66.
Current, J., ReVelle, C. S., & Cohon, J. (1987). The median shortest path problem: Amultiobjective approach to analyze cost vs. accessibility in the design oftransportation networks. Transportation Science, 21(3), 188–197.
Dicesare, F. A. (1970). Systems analysis approach to urban transit guidewaylocation. Ph.D. Dissertation, Department of Electrical Engineering, Carnegie-Mellon University.
Dufourd, H., Gendreau, M., & Laporte, G. (1996). Locating a transit line using tabusearch. Location Science, 4, 1–19.
Fernández, P., & Marín, A. (2003). A heuristic procedure for path location withmultisource demand. INFOR, 41(2), 165–177.
Labbé, M., Laporte, G., & Rodríguez, I. (1998). Path, tree and cycle location. In T. G.Crainic & G. Laporte (Eds.), Fleet management and logistics (pp. 187–204).Boston: Kluwer.
Laporte, G., Mesa, J. A., & Ortega, F. (2000). Optimization methods for the planning ofrapid transit systems. European Journal of Operational Research, 122, 1–10.
Laporte, G., Mesa, J. A., & Ortega, F. (2005). Maximizing trip coverage in the locationof a single rapid transit alignment. Annals of Operations Research, 136, 49–63.
Matisziw, T., Murray, A., & Kim, C. (2006). Strategic route extension in transitnetworks. European Journal of Operational Research, 171, 661–673.
Mesa, J. A., & Boffey, T. B. (1996). A review of extensive facility location in networks.European Journal of Operational Research, 95, 592–603.
Obreque, C., Marianov, V., & Ríos, M. (2008). Optimal design of hierarchicalnetworks with free main path extremes. Operetional Research Letters.
SECTRA (2009). Encuestas de Movilidad en Centros Urbanos. <http://sintia.sectra.cl/>Accessed 15.11.09.





























