Embed Size (px)
Citation preview

MAKALAH
MESIN INDUKSI 3-PHASA
Disusun Oleh:
Nama : Bayu Aji Nugroho
NIM : 2011 – 11 – 208
Kelas : A
Jurusan : S1 Teknik Elektro
1
SEKOLAH TINGGI TEKNIK PLN JAKARTA
2014DAFTAR ISI
Halaman judul..................................................... 1
Daftar isi ....................................................... 2
BAB I PENDAHULUAN ............................................... 3
1.1................................................Latar belakang
..............................................................3
1.2..................................... Tujuan penulisan makalah
..............................................................3
BAB II PEMBAHASAN ................................................ 4
2.1. Pengenalan motor induksi 3 fasa ............................. 4
2.2. Direct Torque Control ....................................... 6
2.3. Kontrol PI .................................................. 7
2.4. Keuntungan motor induksi 3 fasa ............................. 7
2.5. Kerugian motor induksi 3 fasa ............................... 7
2.6. Prinsip kerja motor induksi 3 fasa ......................... 7
2.7. Kontruksi motor induksi 3 fasa .............................. 8
2.8. Parts lainnya ............................................... 14
2.9. Aplikasi motor induksi ada evarator ......................... 15
2.10. Perawatan ................................................. 19
BAB II KESIMPULAN ................................................ 20
2
BAB I
PENDAHULUAN
1.1. Latar belakang
Motor induksi merupakan motor listrik arus bolak balik (AC) yang
paling luas digunakan. Penamaannya berasal dari kenyataan bahwa motor
ini bekerja berdasarkan induksi medan magnet stator ke statornya, dimana
arus rotor motor ini bukan diperoleh dari sumber tertentu, tetapi
merupakan arus yang terinduksi sebagai akibat adanya perbedaan relatif
antara putaran rotor dengan medan putar (rotating magnetic field) yang
dihasilkan oleh arus stator. Motor induksi sangat banyak digunakan di
dalam kehidupan sehari-hari baik di industri maupun di rumah tangga. Hal
ini disebabkan karena motor induksi memiliki berbagai keunggulan
dibanding dengan motor listrik yang lain, yaitu diantaranya karena
harganya yang relatif murah, konstruksinya yang sederhana dan kuat serta
karakteristik kerja yang baik.
3
Motor induksi yang umum dipakai adalah motor induksi 3-fase dan
motor induksi 1-fase. Motor induksi 3-fase dioperasikan pada sistem
tenaga 3-fase dan banyak digunakan di dalam berbagai bidang industri
dengan kapasitas yang besar. Motor induksi 1-fase dioperasikan pada
sistem tenaga 1-fase dan banyak digunakan terutama untuk peralatan rumah
tangga seperti kipas angin, lemari es, pompa air, mesin cuci dan
sebagainya karena motor induksi 1-fase mempunyai daya keluaran yang
rendah.
1.2. Tujuan
Tujuan dalam penulisan makalah ini yaitu :
1. Mengerti dan memahami konsep untuk analisis motor induksi 3 fasa
2. Dapat memahami tentang aplikasi motor induksi 3 fasa di dalam dunia
industri
3. Dapat memahami prinsip kerja dan kontruksi dari motor listrik 3
fasa
BAB II
PEMBAHASAN
4
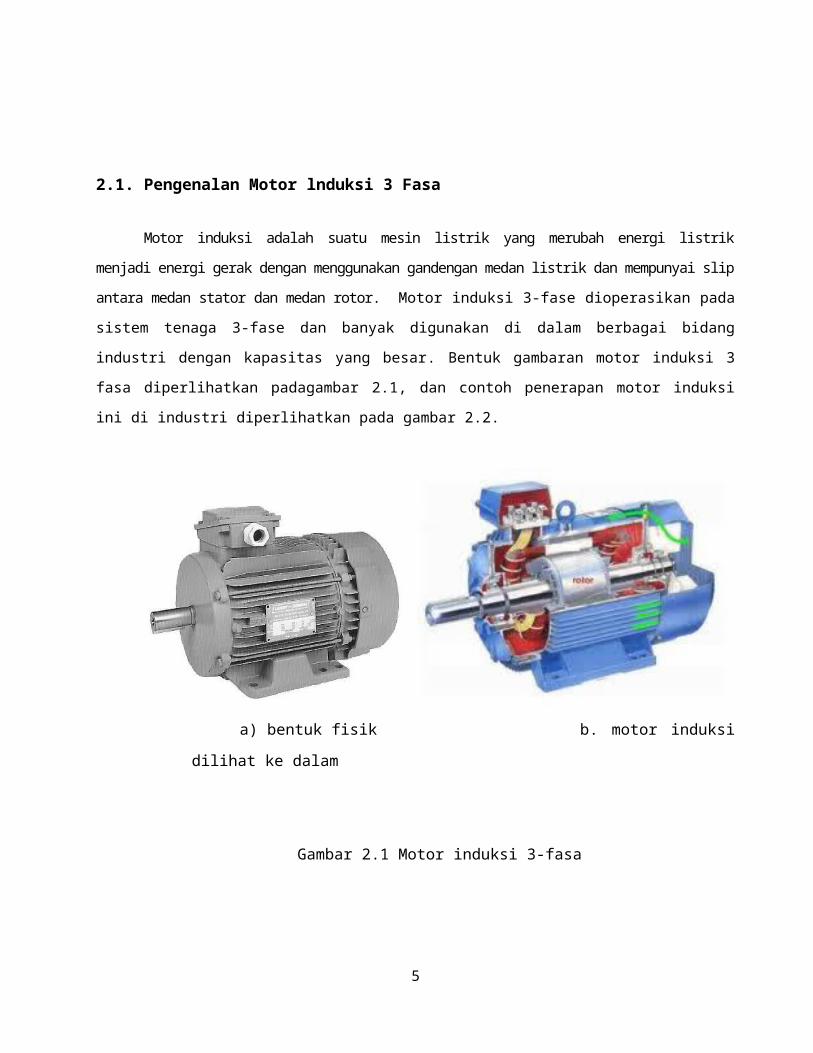
2.1. Pengenalan Motor lnduksi 3 Fasa
Motor induksi adalah suatu mesin listrik yang merubah energi listrik
menjadi energi gerak dengan menggunakan gandengan medan listrik dan mempunyai slip
antara medan stator dan medan rotor. Motor induksi 3-fase dioperasikan pada
sistem tenaga 3-fase dan banyak digunakan di dalam berbagai bidang
industri dengan kapasitas yang besar. Bentuk gambaran motor induksi 3
fasa diperlihatkan padagambar 2.1, dan contoh penerapan motor induksi
ini di industri diperlihatkan pada gambar 2.2.
a) bentuk fisik b. motor induksi
dilihat ke dalam
Gambar 2.1 Motor induksi 3-fasa
5

Gambar 2.2 Penerapan motor induksi di dunia industri
Data-data motor induksi mengenai daya, tegangan dan data lain yang
berhubungan dengan kerja motor induksi dibuatkan pada plat nama (name
plate) motor induksi. Contoh data yang ditampilkan pada plat nama motor
induksi ini diperlihatkan pada gambar 2.3
6
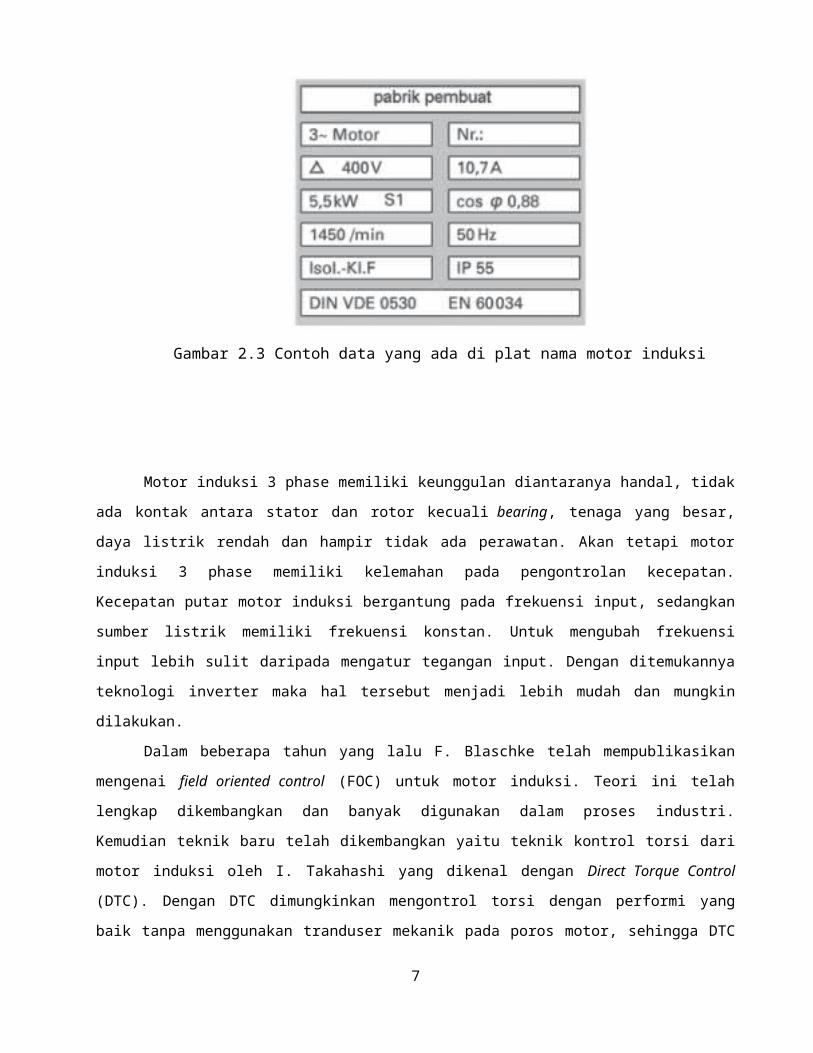
Gambar 2.3 Contoh data yang ada di plat nama motor induksi
Motor induksi 3 phase memiliki keunggulan diantaranya handal, tidak
ada kontak antara stator dan rotor kecuali bearing, tenaga yang besar,
daya listrik rendah dan hampir tidak ada perawatan. Akan tetapi motor
induksi 3 phase memiliki kelemahan pada pengontrolan kecepatan.
Kecepatan putar motor induksi bergantung pada frekuensi input, sedangkan
sumber listrik memiliki frekuensi konstan. Untuk mengubah frekuensi
input lebih sulit daripada mengatur tegangan input. Dengan ditemukannya
teknologi inverter maka hal tersebut menjadi lebih mudah dan mungkin
dilakukan.
Dalam beberapa tahun yang lalu F. Blaschke telah mempublikasikan
mengenai field oriented control (FOC) untuk motor induksi. Teori ini telah
lengkap dikembangkan dan banyak digunakan dalam proses industri.
Kemudian teknik baru telah dikembangkan yaitu teknik kontrol torsi dari
motor induksi oleh I. Takahashi yang dikenal dengan Direct Torque Control
(DTC). Dengan DTC dimungkinkan mengontrol torsi dengan performi yang
baik tanpa menggunakan tranduser mekanik pada poros motor, sehingga DTC
7
dapat dikatakan sebagai teknik kontrol “type sensorless” . Dengan menggunakan
sensor putaran rotor motor akan mengakibatkan stabilitas yang rendah dan
ada noise, sehingga dalam pengemudian motor induksi dengan pemakaian
khusus menggunakan sensor mekanik akan menyulitkan.
Untuk mengontrol kecepatan motor induksi 3 phase menggunakan metode Direct
Torque Control memiliki beberapa kelebihan diantaranya adalah :
1. Tidak membutuhkan transformasi koordinat.
2. Tidak membutuhkan pembangkit pulsa PWM.
3. Tidak membutuhkan regulator arus.
4. Kurang bergantung pada parameter mesin.
Metode Direct Torque Control merupakan tipe kontrol close loop. Kontrol close loop
umum digunakan di dalam pengaturan kecepatan motor induksi karena
memberikan respon kecepatan yang lebih baik dari pada open loop. Kontrol
close loop disebut juga kontrol umpan balik yang menjadikan output sebagai
perbandingan dengan input (referensi) untuk memperoleh suatu error.
Didalam suatu sistem yang handal, adanya error merupakan suatu kerugian.
Oleh karena itu, digunakan control PI yang diharapkan dapat menekan error
sampai nilai minimal. Namun hal ini membutuhkan perhitungan matematik
yang rumit dan komplek dalam menentukan Kp dan Ki yang sesuai, agar
diperoleh kinerja motor yang bagus.
2.2. Direct Torque Control (DTC)
Direct Torque Control (DTC) adalah kontrol berdasarkan fluks stator
dalam kerangka seferensi stator menggunakan kontrol langsung dari
switching inverter. Ide dasar dari DTC adalah perubahan torsi sebanding
dengan slip antara fluk stator dan fluk rotor pada kondisi fluk bocor
stator tetap. Hal ini banyak dikenali untuk pengaturan torsi dan fluk
cepat dan robust. Pada motor induksi dengan rotor sangkar untuk waktu
tetap rotor menjadi sangat besar, fluk bocor rotor berubah perlahan
8
dibanding dengan perubahan fluk bocor stator. Oleh karena itu, pada
keadaan perubahan yang cepat fluk rotor cenderung tidak berubah.
Perubahan cepat dari torsi elektromagnetik dapat dihasilkan dari putaran
fluk stator, sebagai arah torsi. Dengan kata lain fluk stator dapat
seketika mempercepat atau memperlambat dengan menggunakan vektor
tegangan stator yang sesuai. Torsi dan fluk kontrol bersama-sama dan
decouple dicapai dengan pengaturan langsung dari tegangan stator, dari
error respon torsi dan fluk. DTC biasanya digunakan sesuai vektor
tegangan dalam hal ini untuk memelihara torsi dan fluk stator dengan dua
daerah histerisis, yang menghasilkan perilaku bang bang dan variasi
prosedur frekuensi pensaklaran dan ripple fluk, torsi dan arus yang penting.
2.3. Kontrol PI
Kontrol PI merupakan salah satu jenis pengatur yang banyak
digunakan pada kontrol loop tertutup. Selain itu sistem ini mudah
digabungkan dengan metoda pengaturan yang lain seperti Fuzzy dan Robust,
Sehingga akan menjadi suatu sistem pengatur yang semakin baik. Kontrol
PI terdiri dari 2 jenis cara pengaturan yang saling dikombinasikan,
yaitu Kontrol P (Proportional) dan Kontrol I (Integral). Masing-masing
memiliki parameter tertentu yang harus diset untuk dapat beroperasi
dengan baik, yang disebut sebagai konstanta. Setiap jenis, memiliki
kelebihan dan kekurangan masing-masing.
2.4. Keuntungan motor induksi 3 fasa :
Konstruksi sangat kuat dan sederhana terutama bila motor dengan
rotor sangkar.
Harganya relatif murah dan kehandalannya tinggi.
Effesiensi relatif tinggi pada keadaan normal, tidak ada sikat
sehingga rugi gesekan kecil.
9
Biaya pemeliharaan rendah karena pemeliharaan motor hampir tidak
diperlukan.
2.5. Kerugian penggunaan motor induksi 3 fasa
Kecepatan tidak mudah dikontrol
Power faktor rendah pada beban ringan
Arus start biasanya 5 sampai 7 kali dari arus nominal
2.6. Prinsip kerja motor induksi 3 fasa
Bila sumber tegangan tiga fasa dipasang pada kumparan stator, maka
pada kumparan stator akan timbul medan putar dengan kecepatan, ns =
120f/P , ns = kecepatan sinkron, f = frekuensi sumber, p = jumlah
kutup
Medan putar stator akan memotong konduktor yang terdapat pada sisi
rotor, akibatnya pada kumparan rotor akan timbul tegangan induksi (
ggl ) sebesar E2s = 44,4fnØ. Keterangan : E = tegangan induksi ggl,
f = frekkuensi, N = banyak lilitan, Q = fluks
Karena kumparan rotor merupakan kumparan rangkaian tertutup, maka
tegangan induksi akan menghasilkan arus ( I ).
Adanya arus dalam medan magnet akan menimbulkan gaya ( F ) pada
rotor.
Bila torsi awal yang dihasilkan oleh gaya F pada rotor cukup besar
untuk memikul torsi beban, maka rotor akan berputar searah dengan
arah medan putar stator.
Untuk membangkitkan tegangan induksi E2s agar tetap ada, maka
diperlukan adanya perbedaan relatif antara kecepatan medan putar
stator (ns) dengan kecepatan putar rotor (nr).
Perbedaan antara kecepatan nr dengan ns disebut dengan slip ( S )
yang dinyatakan dengan Persamaan S = ns-nr/ns (100%)
10
Jika ns = nr tegangan akan terinduksi dan arus tidak mengalir pada
rotor, dengan demikian tidak ada torsi yang dapat dihasilkan. Torsi
suatu motor akan timbul apabila ns > nr.
Dilihat dari cara kerjanya motor tiga phasa disebut juga dengan
motor tak serempak atau asinkron.
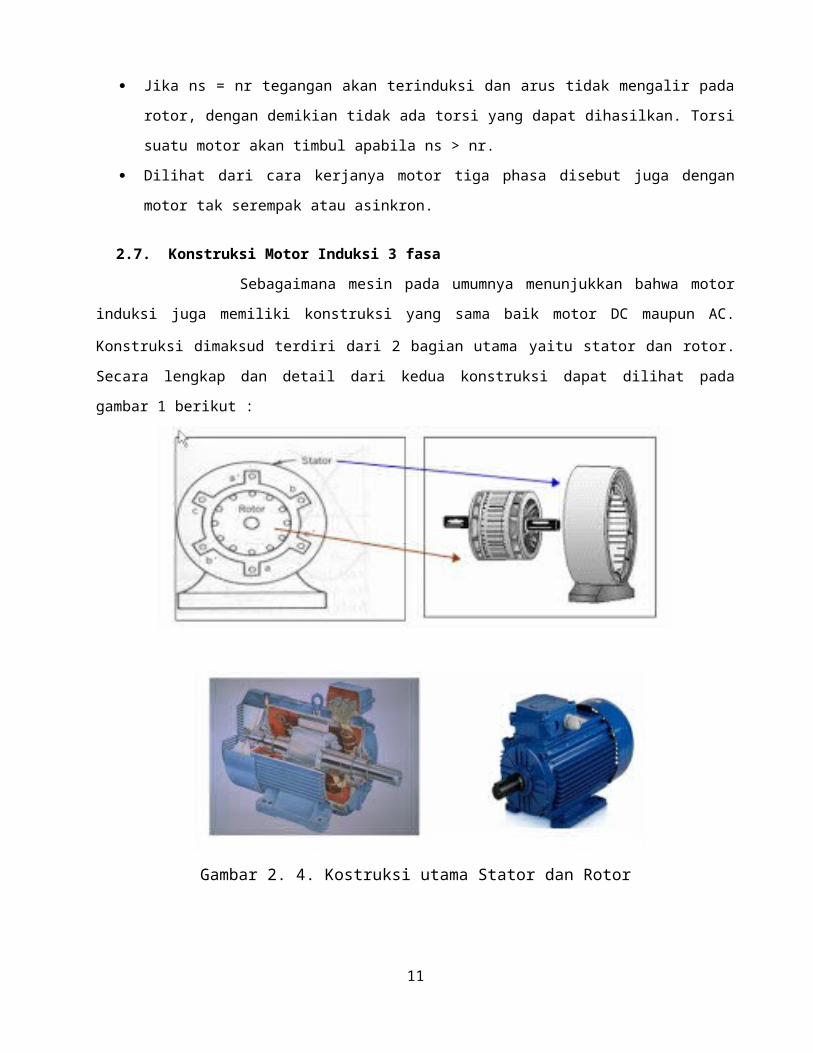
2.7. Konstruksi Motor Induksi 3 fasa
Sebagaimana mesin pada umumnya menunjukkan bahwa motor
induksi juga memiliki konstruksi yang sama baik motor DC maupun AC.
Konstruksi dimaksud terdiri dari 2 bagian utama yaitu stator dan rotor.Secara lengkap dan detail dari kedua konstruksi dapat dilihat pada
gambar 1 berikut :
Gambar 2. 4. Kostruksi utama Stator dan Rotor
11
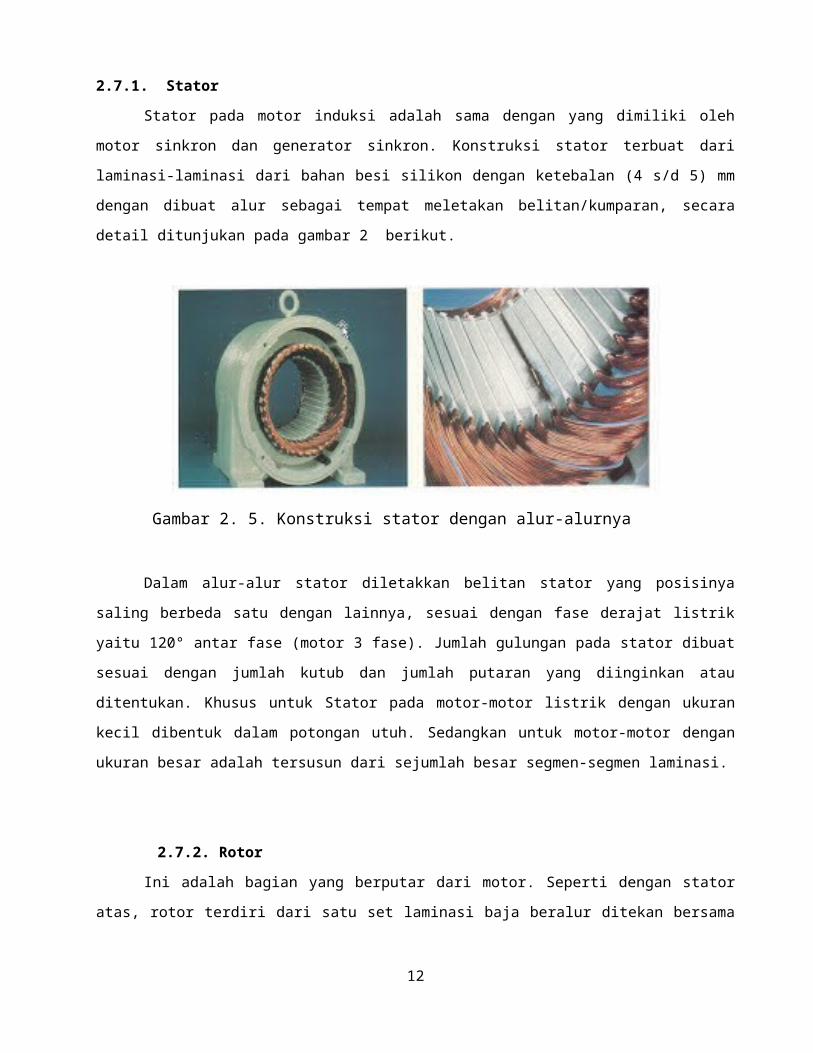
2.7.1. Stator
Stator pada motor induksi adalah sama dengan yang dimiliki oleh
motor sinkron dan generator sinkron. Konstruksi stator terbuat dari
laminasi-laminasi dari bahan besi silikon dengan ketebalan (4 s/d 5) mm
dengan dibuat alur sebagai tempat meletakan belitan/kumparan, secara
detail ditunjukan pada gambar 2 berikut.
Gambar 2. 5. Konstruksi stator dengan alur-alurnya
Dalam alur-alur stator diletakkan belitan stator yang posisinya
saling berbeda satu dengan lainnya, sesuai dengan fase derajat listrik
yaitu 120° antar fase (motor 3 fase). Jumlah gulungan pada stator dibuat
sesuai dengan jumlah kutub dan jumlah putaran yang diinginkan atau
ditentukan. Khusus untuk Stator pada motor-motor listrik dengan ukuran
kecil dibentuk dalam potongan utuh. Sedangkan untuk motor-motor dengan
ukuran besar adalah tersusun dari sejumlah besar segmen-segmen laminasi.
2.7.2. Rotor
Ini adalah bagian yang berputar dari motor. Seperti dengan stator
atas, rotor terdiri dari satu set laminasi baja beralur ditekan bersama
12
dalam bentuk jalur magnetik silinder dan sirkuit listrik. Rangkaian
listrik dari rotor dapat berupa :
Menurut jenis rotor pada motor induksi dibagi menjadi 2 (dua) bagian,
yaitu:
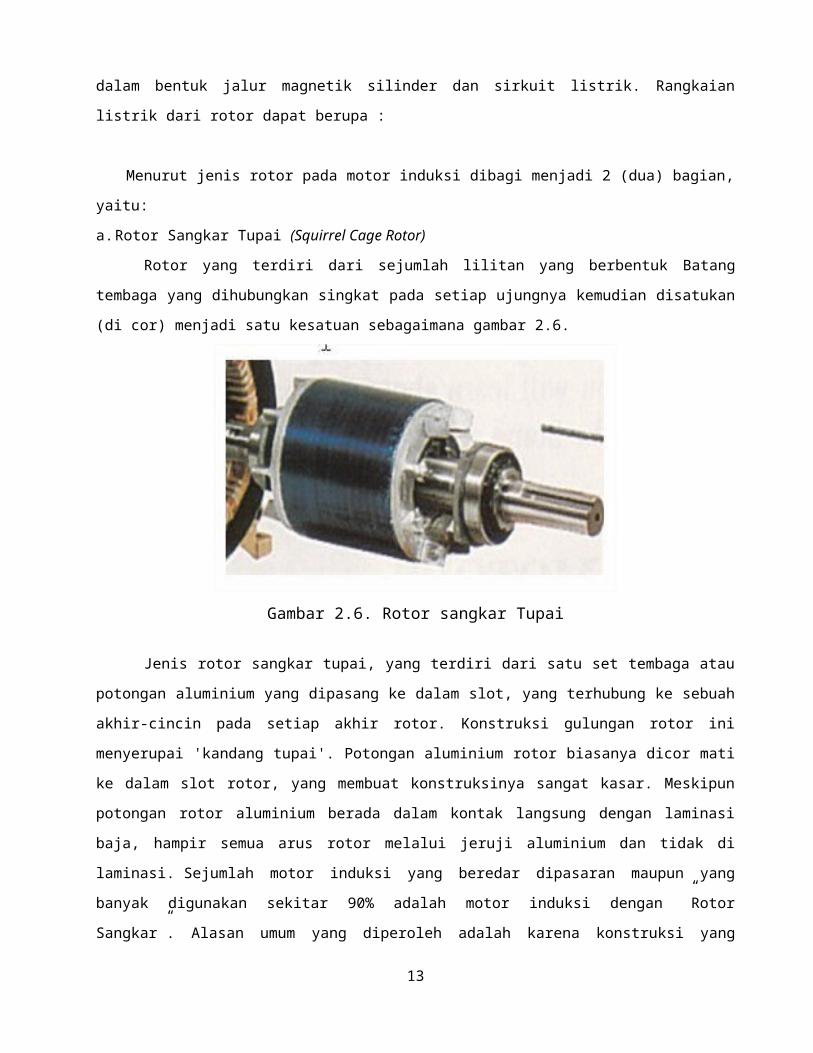
a.Rotor Sangkar Tupai (Squirrel Cage Rotor)
Rotor yang terdiri dari sejumlah lilitan yang berbentuk Batang
tembaga yang dihubungkan singkat pada setiap ujungnya kemudian disatukan
(di cor) menjadi satu kesatuan sebagaimana gambar 2.6.
Gambar 2.6. Rotor sangkar Tupai
Jenis rotor sangkar tupai, yang terdiri dari satu set tembaga atau
potongan aluminium yang dipasang ke dalam slot, yang terhubung ke sebuah
akhir-cincin pada setiap akhir rotor. Konstruksi gulungan rotor ini
menyerupai 'kandang tupai'. Potongan aluminium rotor biasanya dicor mati
ke dalam slot rotor, yang membuat konstruksinya sangat kasar. Meskipun
potongan rotor aluminium berada dalam kontak langsung dengan laminasi
baja, hampir semua arus rotor melalui jeruji aluminium dan tidak di
laminasi. Sejumlah motor induksi yang beredar dipasaran maupun yang
banyak digunakan sekitar 90% adalah motor induksi dengan ”Rotor
Sangkar”. Alasan umum yang diperoleh adalah karena konstruksi yang
13

sederhana dan juga lebih murah harganya. Konstruksi rotor sebagaimana
gambar 2.7. berikut ini, menunjukkan konstruksi batang-batang konduktor
dari bahan tembaga atau alumunium yang dihubungkan singkat.
Gambar 2.7. Konstruksi dan bagian dari rotor sangkar
Sejumlah batang-batang konduktor tersebut dimasukkan ke dalam
laminasi-laminasi yang terbuat dari bahan besi silikon serta menjadi
satu dengan poros rotor. Sebagaimana konstruksi tersebut di atas
terutama batang-batang konduktor yang terhubung singkat, maka tidak
dimungkinkan untuk menambah ”Tahanan Luar” (yang dipasang secara seri)
dengan rotor guna keperluan ”Pengasutan”. Selain itu pula posisi dari
batang-batang konduktor/tembaga posisinya dibuat tidak paralel (tidak
segaris) dengan poros rotor. Posisi batang konduktor agak dimiringkan
sebagaimana terlihat pada gambar 4 di atas.
Alasan diletakan posisi miring dari konduktor terhadap poros adalah :
Memperhalus suara pada saat motor berputar (memperkecil dengungan
magnetis/suara bising)
14

Menghilangkan kecenderungan ”Lock atau mengunci” yang disebabkan
karena interaksi langsung antara medan magnit stator dan rotor.
Pada motor-motor dengan kapasitas kecil, batang-batang konduktor di cor
menjadi satu bagian dengan alumunium alloy. Selain itu pula contoh lainnya
adalah ada juga yang rotornya hanya berupa besi masip tanpa satupun
konduktor. Jenis seperti ini biasanya disebut sebagai ”Motor Arus Eddy”.
b. Rotor Belitan (Wound Rotor)
Rotor yang terbuat dari laminasi-laminasi besi dengan alur-alur
sebagai tempat meletakkan belitan (kumparan) dengan ujung-ujung belitan
yang juga terhubung singkat seperti gambar 2.8.
Gambar 2.8. Rotor berlian
Motor dengan jenis rotor belitan biasanya diperlukan pada saat
pengasutan atau pengaturan kecepatan dimana dikehendaki torsi asut yang
tinggi
15
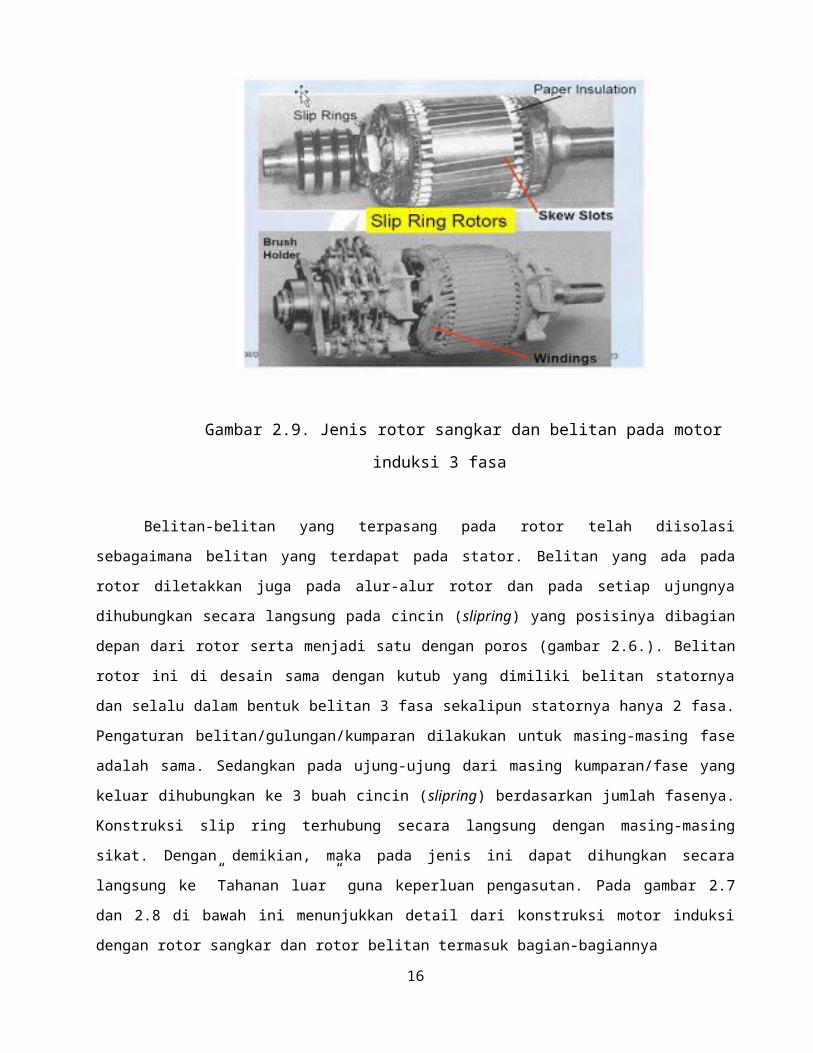
Gambar 2.9. Jenis rotor sangkar dan belitan pada motor
induksi 3 fasa
Belitan-belitan yang terpasang pada rotor telah diisolasi
sebagaimana belitan yang terdapat pada stator. Belitan yang ada pada
rotor diletakkan juga pada alur-alur rotor dan pada setiap ujungnya
dihubungkan secara langsung pada cincin (slipring) yang posisinya dibagian
depan dari rotor serta menjadi satu dengan poros (gambar 2.6.). Belitan
rotor ini di desain sama dengan kutub yang dimiliki belitan statornya
dan selalu dalam bentuk belitan 3 fasa sekalipun statornya hanya 2 fasa.
Pengaturan belitan/gulungan/kumparan dilakukan untuk masing-masing fase
adalah sama. Sedangkan pada ujung-ujung dari masing kumparan/fase yang
keluar dihubungkan ke 3 buah cincin (slipring) berdasarkan jumlah fasenya.
Konstruksi slip ring terhubung secara langsung dengan masing-masing
sikat. Dengan demikian, maka pada jenis ini dapat dihungkan secara
langsung ke ”Tahanan luar” guna keperluan pengasutan. Pada gambar 2.7
dan 2.8 di bawah ini menunjukkan detail dari konstruksi motor induksi
dengan rotor sangkar dan rotor belitan termasuk bagian-bagiannya
16
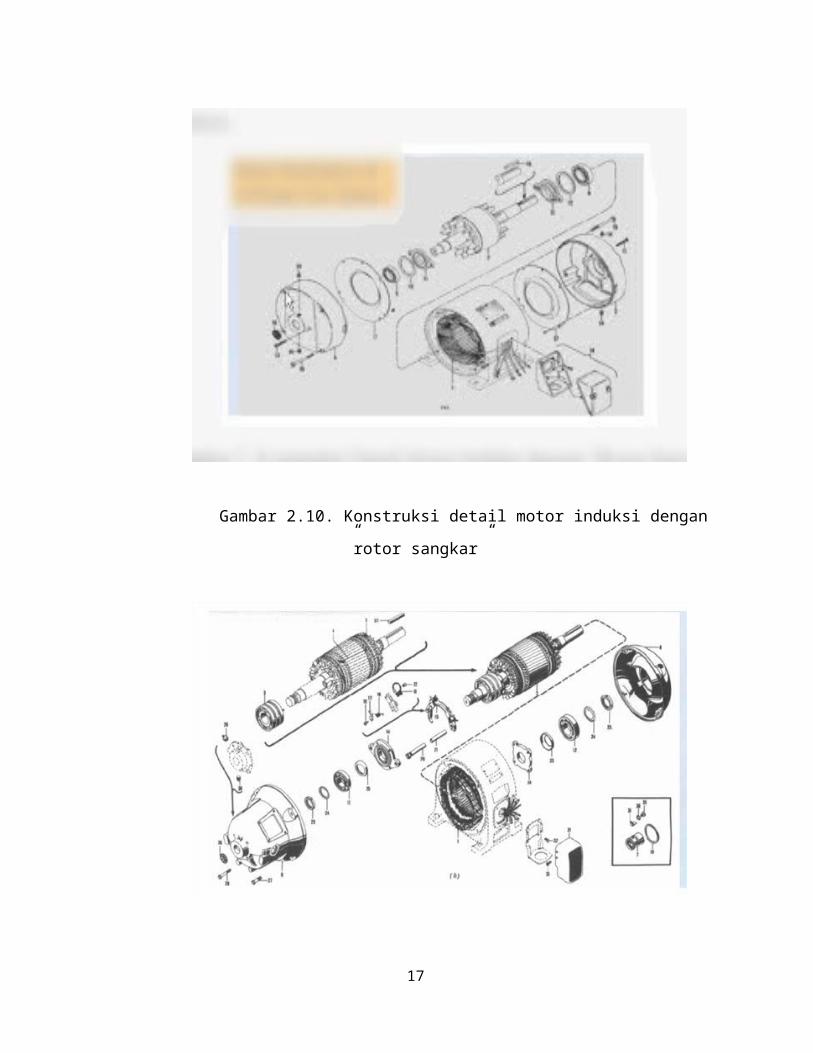
Gambar 2.10. Konstruksi detail motor induksi dengan
”rotor sangkar”
17
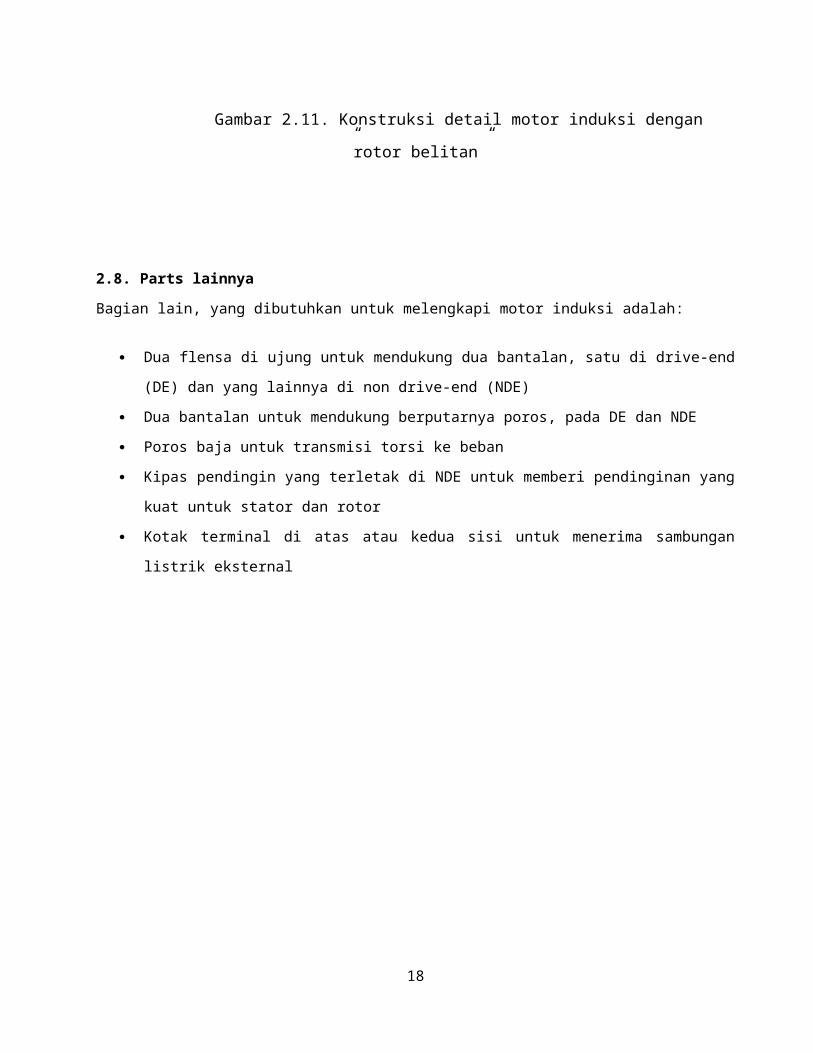
Gambar 2.11. Konstruksi detail motor induksi dengan
”rotor belitan”
2.8. Parts lainnya
Bagian lain, yang dibutuhkan untuk melengkapi motor induksi adalah:
Dua flensa di ujung untuk mendukung dua bantalan, satu di drive-end
(DE) dan yang lainnya di non drive-end (NDE)
Dua bantalan untuk mendukung berputarnya poros, pada DE dan NDE
Poros baja untuk transmisi torsi ke beban
Kipas pendingin yang terletak di NDE untuk memberi pendinginan yang
kuat untuk stator dan rotor
Kotak terminal di atas atau kedua sisi untuk menerima sambungan
listrik eksternal
18
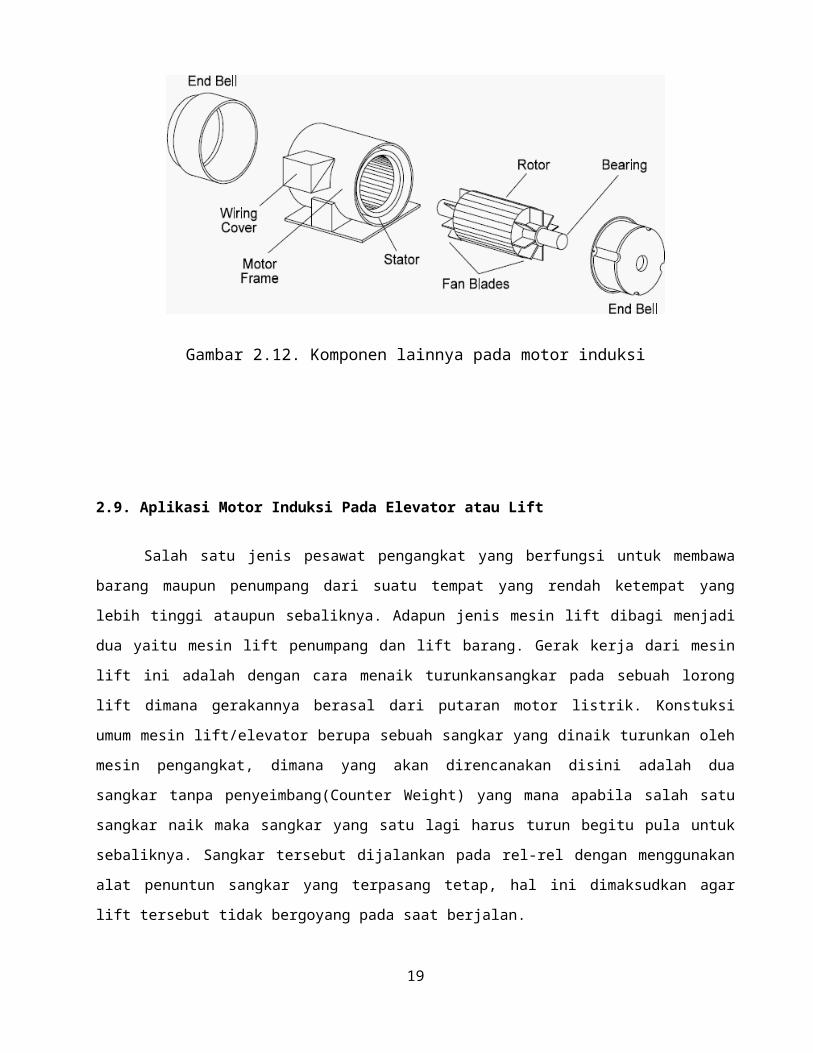
Gambar 2.12. Komponen lainnya pada motor induksi
2.9. Aplikasi Motor Induksi Pada Elevator atau Lift
Salah satu jenis pesawat pengangkat yang berfungsi untuk membawa
barang maupun penumpang dari suatu tempat yang rendah ketempat yang
lebih tinggi ataupun sebaliknya. Adapun jenis mesin lift dibagi menjadi
dua yaitu mesin lift penumpang dan lift barang. Gerak kerja dari mesin
lift ini adalah dengan cara menaik turunkansangkar pada sebuah lorong
lift dimana gerakannya berasal dari putaran motor listrik. Konstuksi
umum mesin lift/elevator berupa sebuah sangkar yang dinaik turunkan oleh
mesin pengangkat, dimana yang akan direncanakan disini adalah dua
sangkar tanpa penyeimbang(Counter Weight) yang mana apabila salah satu
sangkar naik maka sangkar yang satu lagi harus turun begitu pula untuk
sebaliknya. Sangkar tersebut dijalankan pada rel-rel dengan menggunakan
alat penuntun sangkar yang terpasang tetap, hal ini dimaksudkan agar
lift tersebut tidak bergoyang pada saat berjalan.
19

Gambar 2.13. Bagian- bagian elevator
1. Control System
20

2. Geared Machine
3. Primary Velocity Tranducer
4. Governor
5. Hoisting Ropes
6. Roller Guide/ Guide Shoe
7. Secondary Possition Tranducer
8. Door Operator
9. Entrance Protection System
10. Load Weighing Tranducers
11. Car Safety Device
12. Traveling Cable
13. Elevator Rail
14. Counterweight
15. Compesation Ropes
16. Governor Tension Sheave
17. Counterweight Buffer
18. Car Buffer
Bagian-bagian diatas belum termasuk system control pada rangkaian
elecktro penggatur arus listrik pada elevator. Bagian-bagian rangkaian
elektro pengatur arus listriknya adalah :
1. Motor Penggerak
21
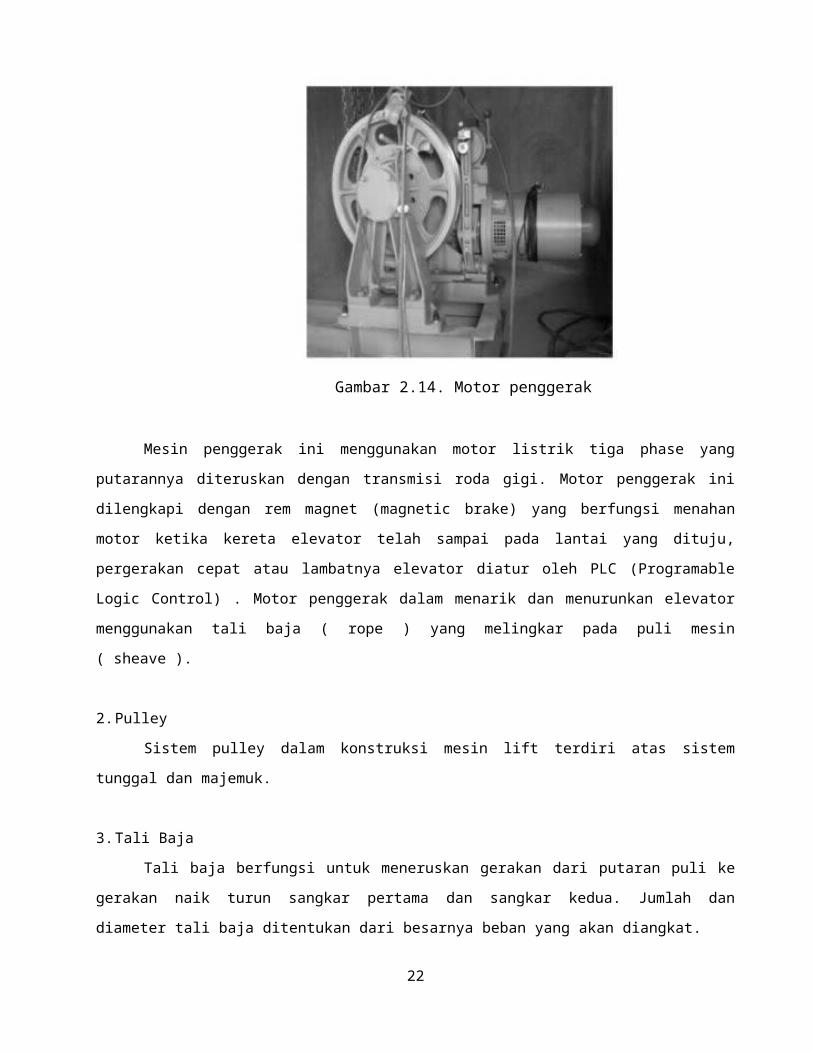
Gambar 2.14. Motor penggerak
Mesin penggerak ini menggunakan motor listrik tiga phase yang
putarannya diteruskan dengan transmisi roda gigi. Motor penggerak ini
dilengkapi dengan rem magnet (magnetic brake) yang berfungsi menahan
motor ketika kereta elevator telah sampai pada lantai yang dituju,
pergerakan cepat atau lambatnya elevator diatur oleh PLC (Programable
Logic Control) . Motor penggerak dalam menarik dan menurunkan elevator
menggunakan tali baja ( rope ) yang melingkar pada puli mesin
( sheave ).
2.Pulley
Sistem pulley dalam konstruksi mesin lift terdiri atas sistem
tunggal dan majemuk.
3.Tali Baja
Tali baja berfungsi untuk meneruskan gerakan dari putaran puli ke
gerakan naik turun sangkar pertama dan sangkar kedua. Jumlah dan
diameter tali baja ditentukan dari besarnya beban yang akan diangkat.
22
4.Sangkar / Kereta
Sangkar adalah suatu tempat yang digunakan untuk mengangkut
penumpang maupun barang. sangkar elevator beroperasi pada ruang luncur
dan menapak pada rail di kedua sisinya, pada sisi kanan dan kiri
terdapat pemandu rail ( sliding guide ) yang berfungsi memandu atau
menapaki rail. Selain pemandu rail ( sliding guide ) juga terdapat karet
peredam ( silencer rubber ) yang berfungsi untuk mengurangi kejutan
ketika elevator berhenti maupun mulai start, selain itu pula terdapat
pendeteksi beban ( switch overload ) yang terdapat dibawah kereta
elevator. Pada pintu kereta elevator juga terdapat sensor gerak
( safety ray ) dan sensor sentuh (safety shoe) yang terpasang pada
pintu kereta dan berfungsi supaya untuk penumpang elevator tidak
terjepit pintu elevator, didalam kereta elevator juga terdapat tombol-
tombol pemesanan lantai ( floor button ) yang akan dituju oleh pengguna
elevator. Kereta elevator memiliki pintu otomatis yang digerakkan oleh
motor stepper yang bekerja berdasarkan sinyal digital yang asalnya dari
sensor kedekatan ( proximity ) yang berfungsi menentukan level atau
tidaknya lantai, setelah lantai dinyatakan level atau rata maka motor
stepper akan membuka pintu secara otomatis.
5.Bobot Penyeimbang (Counter Weight)
Penyeimbang (Counter Weight) dimaksudkan untuk mengimbangi dari
berat sangkar sehingga mesin tidak menahan beban yang tinggi. Pada
umumnya berat penyeimbang sama dengan berat maksimum sangkar ditambah
40% - 50% .
23

6. Rem
Mesin lift dilengkapi dengan rel elektromagnetik tertutup. Yang
paling umum adalah rem lift terdiri dari perakitan kompresi pegas ,
sepatu rem dengan lapisan, dan perakitan sebuah solenoida . Bila
solenoida tidak berenergi, kekuatan pegas sepatu rem untuk mencengkeram
drum rem yang menimbulkan torsiatau tekanan pengereman. Magnet dapat
mengerahkan gaya horizontal untuk menahan rem terbuka dan kembali
menutup saat tidak digunakan. Hal ini dapat dilakukan secara langsung di
salah satu lengan operasi atau melalui sistem linkage. Dalam kedua
kasus, hasilnya adalah sama. Saat diaktifkan pegas sepatu rem ditarik
magnet menjauh dari poros drum rem bersamaan dengan putaran mesin
elevator tersebut.
7. Governor Governor ini dihubungkan ke kereta dengan menggunakan tali baja
pengaman. Tali pengaman ini meneruskan gerakan dari kereta ke governer
dan memutar roda governor. Apabila kecepatan kereta melebihi kecepaan
aman yang diijinkan, maka governor akan bekerja dengan cara sebagai
berikut :
a. Memutus jalur kontrol melalui saklar pembatas kecepatan.
b. Menjepit tali governor dan membuat rem pengaman bekerja
2.10. Perawatan
Hampir semua inti motor dibuat dari baja silikon atau baja gulung
dingin yang dihilangkan karbonnya, sifat-sifat listriknya tidak berubah
dengan usia. Walau begitu, perawatan yang buruk dapat memperburuk
efisiensi motor karena umur motor dan operasi yang tidak handal. Sebagai
contoh, pelumasan yang tidak benar dapat menyebabkan meningkatnya
24
gesekan pada motor dan penggerak transmisi peralatan. Kehilangan
resistansi pada motor, yang meningkat dengan kenaikan suhu. Kondisi
ambien dapat juga memiliki pengaruh yang merusak pada kinerja motor.
Sebagai contoh, suhu ekstrim, kadar debu yang tinggi, atmosfir yang
korosif, dan kelembaban dapat merusak sifat-sifat bahan isolasi; tekanan
mekanis karena siklus pembebanan dapat mengakibatkan kesalahan
penggabungan. Perawatan yang tepat diperlukan untuk menjaga kinerja
motor. Sebuah daftar periksa praktek perawatan yang baik akan meliputi
sebagai berikut.
1.Pemeriksaan motor secara teratur untuk pemakaian bearings dan rumahnya
(untuk mengurangi kehilangan karena gesekan) dan untuk kotoran/debu
pada saluran ventilasi motor (untuk menjamin pendinginan motor)
2. Pemeriksaan kondisi beban untuk meyakinkan bahwa motor tidak
kelebihan atau kekurangan beban. Perubahan pada beban motor dari
pengujian terakhir mengindikasikan suatu perubahan pada beban yang
digerakkan, penyebabnya yang harus diketahui.
3. Pemberian pelumas secara teratur. Fihak pembuat biasanya memberi
rekomendasi untuk cara dan waktu pelumasan motor. Pelumasan yang tidak
cukup dapat menimbulkan masalah, seperti yang telah diterangkan
diatas. Pelumasan yang berlebihan dapat juga menimbulkan masalah,
misalnya 90 minyak atau gemuk yang berlebihan dari bearing motor dapat
masuk ke motor dan menjenuhkan bahan isolasi motor, menyebabkan
kegagalan dini atau mengakibatkan resiko kebakaran.
4. Pemeriksaan secara berkala untuk sambungan motor yang benar dan
peralatan yang digerakkan. Sambungan yang tidak benar dapat
mengakibatkan sumbu as dan bearings lebih cepat aus, mengakibatkan
kerusakan terhadap motor dan peralatan yang digerakkan.
25
5. Dipastikan bahwa kawat pemasok dan ukuran kotak terminal dan
pemasangannya benar. Sambungan-sambungan pada motor dan starter harus
diperiksa untuk meyakinkan kebersihan dan kekencangnya.
6. Penyediaan ventilasi yang cukup dan menjaga agar saluran pendingin
motor bersih untuk membantu penghilangan panas untuk mengurangi
kehilangan yang berlebihan. Umur isolasi pada motor akan lebih lama:
untuk setiap kenaikan suhu operasi motor 10oC diatas suhu puncak yang
direkomendasikan, waktu pegulungan ulang akan lebih cepat,
diperkirakan separuhnya.
BAB III
KESIMPULAN
Motor induksi 3 fasa merupakan motor yg paling banyak d gunakan
dalam bidang industri, karena memiliki keunggulan yang handal, tidak ada
kontak antara rotor dan stator kecuali bearing, tenaga yang besar, daya
listrik yang rendah dan perawatan yang minim.selain itu kontruksinya
sangat sederhana sehingga tidak terlalu sulit dalam perbaikannya apabila
terjadi kerusakan pada motor sehingga tidak menggangu jalannya produksi
pada industri.
26

27





























